ENVI地形分析

第11章地形分析
数字高程模型(Digital Elevation Model,简称DEM),是用一组有序数值阵列形式表示地面高程的一种实体地面模型。DEM是数字地形模型(Digital Terrain Model,简称DTM)的一个分支,其它各种地形特征值均可由此派生,如坡度、坡向及坡度变化率等地貌特性。DEM还可以计算地形特征参数,包括山峰、山脊、平原、位面、河道和沟谷等。
建立DEM的方法有多种。按数据源及采集方式主要有:(1)直接从地面测量,例如用GPS、全站仪、野外测量等;(2)根据航空或航天影像,通过摄影测量途径获取,如立体坐标量测仪观测及空三加密法、解析测图、数字摄影测量等;(3)从现有地形图上采集,如格网读点法、数字化仪手扶跟踪及扫描仪半自动采集,然后通过内插生成DEM等方法。DEM的内插方法很多,常用的有整体内插、分块内插和逐点内插三种。
下表对比了几种创建DEM的主要方法。
表11.1 几种DEM创建方法汇总i
方法优点缺点
航空摄影测量成熟的方法,精度高,可
获取大比例尺DEM。
成本高,周期长,且受航空管制。
高程点或者等高线差值成本低,操作简单。受数据源限制大,很多地区无高
程点或等高线数据。
卫星遥感可以大范围获取DEM。受天气影响较大,目前可获取的
比例尺较小。
干涉雷达技术可以大范围获取DEM,不
受天气影响。目前获取大比例尺DEM较困难,随着德国高分辨率雷达卫星TanDEM-X的上天会有所突破。
激光雷达技术精度高,可获取大比例尺
DEM。
起步阶段,技术门槛高。
要想快速的获取大范围的DEM数据,卫星遥感是一种较好的方法。随着卫星传感器的飞速发展,获取的DEM精度越来越高。如目前商业卫星最高分辨率的0.41米GeoEye-1,在使用高质量控制资料时,垂直精度的中误差可达到0.5米,可满足1:5000的地图比例尺生产。可以立体成像的卫星主要有ASTER,ALOS PRISM,CARTOSAT-1,FORMOSAT-2,IKONOS,KOMPSAT-2, OrbView-3, QuickBird,RapidEye, GeoEye-1,WorldView-1/2,SPOT 5/6,Pleiades,以及国产的资源三号、资源一号02C星、天绘卫星等。
由于DEM描述的是地面高程信息,它在测绘、水文、气象、地貌、地质、土壤、工程建设、通讯、军事等国民经济和国防建设,以及人文和自然科学领域有着广泛的应用。例如在工程建设上,可用于土方量计算、通视分析等;在防洪减灾方面,DEM是进行水文分析,包括汇水区分析、水系网络分析、降雨分析、蓄洪计算、淹没分析等的基础;在无线通讯上,可用于蜂窝电话的基站分析等。DEM还广泛用于生产地图产品,如等高线地图、正射地图等。在遥感应用方面,DEM用于制图、正射校正和土地利用分类;还可用于高速公路和铁路的规划中。
11.1 地形建模
11.1.1 地形菜单
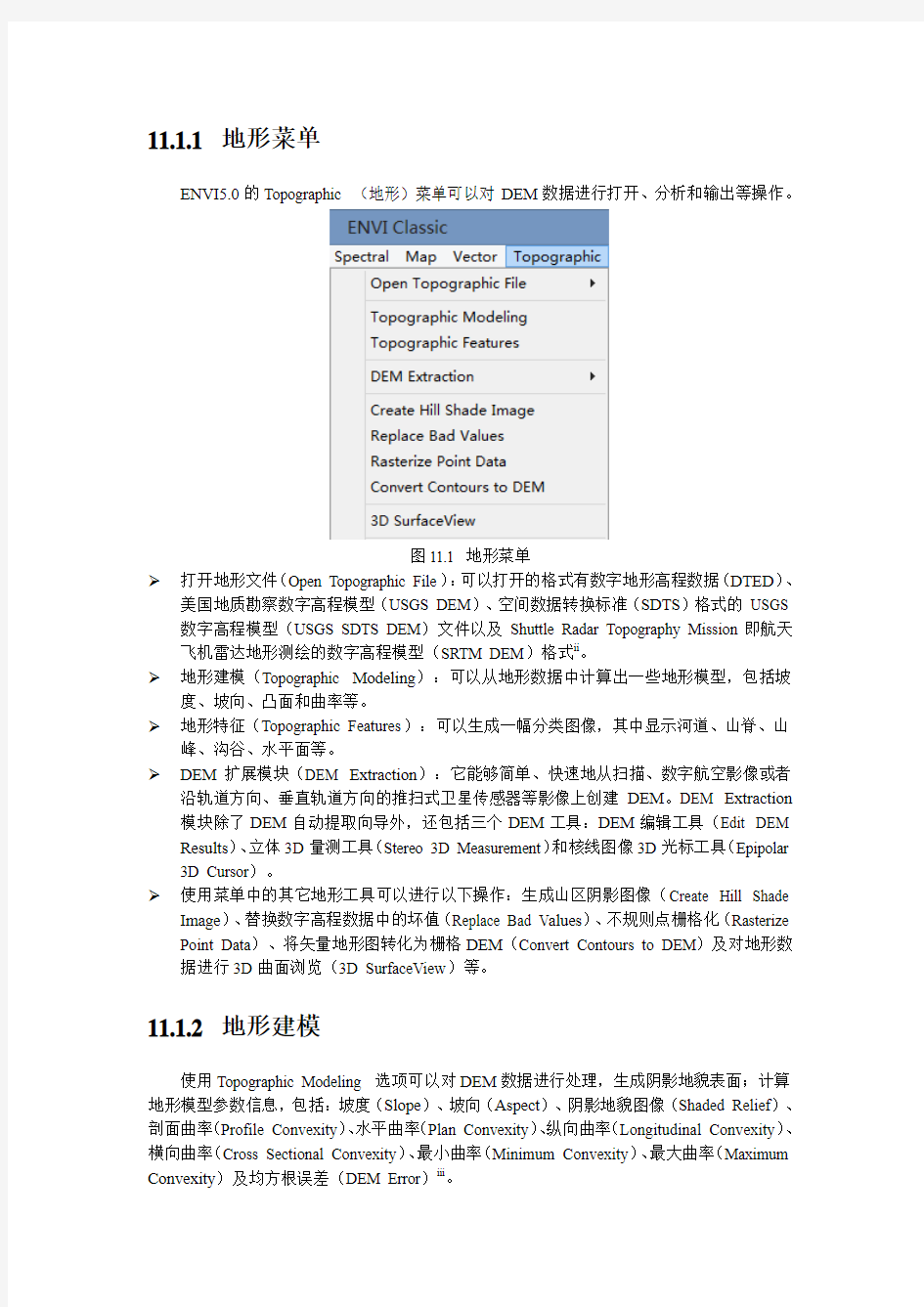
ENVI5.0的Topographic (地形)菜单可以对DEM数据进行打开、分析和输出等操作。
图11.1 地形菜单
打开地形文件(Open Topographic File):可以打开的格式有数字地形高程数据(DTED)、美国地质勘察数字高程模型(USGS DEM)、空间数据转换标准(SDTS)格式的USGS 数字高程模型(USGS SDTS DEM)文件以及Shuttle Radar Topography Mission即航天飞机雷达地形测绘的数字高程模型(SRTM DEM)格式ii。
地形建模(Topographic Modeling):可以从地形数据中计算出一些地形模型,包括坡度、坡向、凸面和曲率等。
地形特征(Topographic Features):可以生成一幅分类图像,其中显示河道、山脊、山峰、沟谷、水平面等。
DEM扩展模块(DEM Extraction):它能够简单、快速地从扫描、数字航空影像或者沿轨道方向、垂直轨道方向的推扫式卫星传感器等影像上创建DEM。DEM Extraction 模块除了DEM自动提取向导外,还包括三个DEM工具:DEM编辑工具(Edit DEM Results)、立体3D量测工具(Stereo 3D Measurement)和核线图像3D光标工具(Epipolar 3D Cursor)。
使用菜单中的其它地形工具可以进行以下操作:生成山区阴影图像(Create Hill Shade Image)、替换数字高程数据中的坏值(Replace Bad V alues)、不规则点栅格化(Rasterize Point Data)、将矢量地形图转化为栅格DEM(Convert Contours to DEM)及对地形数据进行3D曲面浏览(3D SurfaceView)等。
11.1.2 地形建模
使用Topographic Modeling 选项可以对DEM数据进行处理,生成阴影地貌表面;计算地形模型参数信息,包括:坡度(Slope)、坡向(Aspect)、阴影地貌图像(Shaded Relief)、剖面曲率(Profile Convexity)、水平曲率(Plan Convexity)、纵向曲率(Longitudinal Convexity)、横向曲率(Cross Sectional Convexity)、最小曲率(Minimum Convexity)、最大曲率(Maximum Convexity)及均方根误差(DEM Error)iii。
坡度(Slope):以“度”或者百分比为单位,在水平面上为0度;
坡向(Aspect):以“度”为单位,ENVI将正北方向的坡向设为0度,角度按顺时针方向增加;
阴影地貌图像(Shaded Relief):入射角的余弦;
剖面曲率(Profile Convexity):剖面曲率(与z轴所在的平面和坡面相交)度量坡度沿剖面的变化速率;
水平曲率(Plan Convexity):(与XY平面相交)度量坡向沿平面的变化速率;
纵向曲率(Longitudinal Convexity):(相交于包含坡度法线和坡向方向平面)度量沿着下降坡面的表面曲率正交性;
横向曲率(Cross Sectional Convexity):(与包含坡度法线和坡向垂线的平面相交)度量垂直下降坡面的表面曲率正交性;
最小曲率(Minimum Curvature):计算得到整体曲率的最小值;
最大曲率(Maximum Curvature):计算得到整体曲率的最大值;
均方根误差(RMS Error):表示二次曲面与实际数字高程数据的拟合好坏。
ENVI地形模型工具使用图像格式的DEM文件,而不是原始的USGS格式的DEM数据。例如USGS DEM、USGS SDTS DEM、DTED、SRTM DEM等格式都需要通过File—Open External file—Digital Elevation或者Topographic—Open Topographic File选择一种格式打开,ENVI自动将原始格式的DEM转换为ENVI标准栅格文件。
具体地形建模步骤如下:
(1)在ENVI主菜单中,选择Topographic—Topographic Modeling,在弹出的Topo Model Input DEM对话框中,选择一个DEM文件。打开一个新的DEM文件,选择File — Open New File。点击“OK”,打开Topo Model Parameters对话框(图11.2)。
(2)在Topo Model Parameters对话框中,选择地形核大小(Topographic Kernel Size)为5。更改地形核尺寸的目的是为了提取多尺度地形信息,可以使用不同的变化核提取多尺度地形信息。需要注意的是地形核越大,处理速度越慢。
(3)Select Topographic Measures to Compute列表中,选择要计算的地形模型信息,本实验选择了全部。
(4)单击Compute Sun Elevation and Azimuth按钮,在Compute Sun Elevation and Azimuth对话框中(如图1l .3),输入日期和时间:GMT为16:45:14,Lat(纬度)为31度,Lon(经度)为110度。单击OK按钮,ENVI将自动计算出太阳高度角和方位角。
(5)选择输出路径及文件名,单击OK按钮,执行地形建模。
(6)得到的结果是一个多波段图像文件,每一个地形模型形成一个波段(如图1l .4)。
图11.2 Topo Model Parameters对话框
图11.3 Compute Sun Elevation and
Azimuth对话框
图11.4 地形模型图像
11.1.3 三维地形可视化
ENVI的三维可视化功能可以将DEM数据以网格结构(wire frame)、规则格网(ruled grid)或点的形式显示出来,或者将一幅图像叠加到DEM数据上构建简单的三维地形可视化场景。这两个文件的空间分辨率不必相同。若这两个文件都经过定位,它们的投影也可以不必相同,ENVI 将在飞行浏览中对DEM 进行重新投影,使其与图像投影相匹配iv。
三维地形场景的生成步骤如下。
(1)分别将SPOT数据和DEM数据文件打开。
(2)在Toolbox中,选择Topographic—3D Surface View。选择SPOT图像文件的RGB 三个波段,之后在Associated DEM Input File对话框中选择对应的DEM文件(图11.5)。
图11.5 Associated DEM Input File对话框
(3)在3D Surface View Input Parameters对话框中(图11.6),需要设置以下参数: DEM分辨率(DEM Resolution):使用较高DEM分辨率将会减慢可视化的速度。可以选择多个不同的DEM分辨率,在三维场景可视化时根据实际需求来回切换。通常,当确定最佳飞行路线时,可以选择最低的分辨率(64);然后,在显示最终三维曲面飞行时,再选择较高的分辨率。
重采样方法(Resampling):最邻近重采样(Nearest Neighbor)法和象元聚合重采样(Aggregate)法。
DEM最大/最小绘制值范围(DEM min plot value和DEM max plot value):可选项。这些值可从DEM数据中选取(用来去除背景像素值,或限制DEM高程范围)。需要注意的是低于最小值或者高于最大值的DEM值将不会绘制在三维场景中。
垂直夸张系数(Vertical Exaggeration):作用于垂直方向的比例放大系数。值越大,夸张程度越高。
图像纹理分辨率(Image Resolution):原始大小(Full)和设定值(Other)。
(4)单击OK按钮,创建三维场景(图11.7)。
图11.6 3D Surface View Input Parameters对话框
图11.7 三维场景图
(5)在3D Surface View窗口中,交互浏览三维场景。
单击鼠标左键,并沿着水平方向拖动鼠标,这将使得三维曲面绕着Z轴旋转。点击鼠标左键,并沿着垂直方向拖动鼠标,这将会使三维曲面绕着X轴旋转。
单击鼠标中键,并拖动鼠标,可以在相应的方向平移(漫游)图像。
单击鼠标右键,并向右拖动鼠标,可以增大缩放比例系数。点击鼠标右键,并向左拖动鼠标,可以减小缩放比例系数。
11.2 地形特征提取
ENVI能够从DEM中提取地形特征,包括山峰(Peak)、山脊(Ridge)、平原(Pass)、水平面(Plane)、山沟(Channel)和沟谷(Pit)。
提取地形特征的具体操作如下:
(1)在ENVI主菜单中,选择Topographic—Topographic Features;在弹出的Topographic Feature Input DEM对话框中,选择DEM文件,点击OK按钮。打开Topographic Features Parameters对话框(图11.8)。
图11.8 Topographic Features Parameters对话框
(2)坡度容差(Slope Tolerance):设置为1;曲率容差(Curvature Tolerance):设为0.l。这两个容差用来区分像元是山峰、沟谷、平原还是河道、山脊。被区分为山峰、沟谷或平原的像元,其对应坡度值必需小于坡度容差,并且垂直方向曲率必须大于曲率容差。增加坡度容差及减少曲率容差将导致分类输出图像中的山峰、沟谷和平原的数量增多。
(3)地形核大小(Topographic Kernel Size):7。可以使用不同的核尺寸提取多尺度地形信息。核尺寸越大,处理速度越慢。
(4)在Select Feature to Classify列表中,选择所有的地形特征。
(5)选择输出路径及文件名,单击OK按钮,执行地形特征提取。
(6)得到分类图像(图11.9)。
图11.9 输出的分类图像
11.3 立体像对DEM自动提取
在ENVI中,利用立体像对自动提取DEM时,首先需要确认是否拥有DEM Extraction 扩展模块的使用许可。
它的流程总体上分为六步。如下所示:
一、输入立体像对
需要两个具有重叠区的黑白影像,带有RPC文件。 RPC文件用来产生Tie点(连接点)和计算立体图像之间的关系。
二、定义地面控制点
如果没有地面控制点信息,DEM自动提取向导执行的结果是以卫星默认的地势面作为基准面的相对DEM;在有地面控制点信息情况下,可以得到绝对DEM。
三、定义连接点
采用手动或者自动的方式在两个影像上寻找同名点。
四、设定DEM提取参数
参数包括坐标投影、像元大小、插值算法和参数等。
五、输出DEM并检查结果
六、编辑DEM
获取的DEM属于DSM(数字表面模型),根据需要可去除如树高、房子高度等信息,将DSM变成真正的DEM。如果影像上有厚云,这部分区域的DEM实际上是云的高度,也需要进行局部的修改。
11.3.1 DEM自动提取操作步骤
本节内容采用文献4中以CARTOSAT-1(P5)数据为例介绍从立体像对中提取DEM的详细操作步骤。表11.3是数据文件的详细说明。
表11.3 CARTOSA T-1(P5)数据v
文件说明
BANDA.TIF 左影像图像文件
BANDA_MET.TXT 左影像元数据文件
BANDA_RPC.TXT 左影像RCP文件
BANDF.TIF 右影像图像文件
BANDF_MET.TXT 右影像元数据文件
BANDF_RPC.TXT 右影像RCP文件
Tie.pts 连接点文件
P5GEOTIFF.DOC 数据格式说明文件
第一步输入立体像对
(1)在主菜单中,选择File—Open Image选择BANDA.TIF和BANDF.TIF文件打开。
(2)在主菜单中,选择Topographic—DEM Extraction打开DEM Extraction模块功能命令,菜单命令及其功能说明如下表所示。
表11.2 DEM Extraction模块菜单命令及其功能说明vi
菜单命令功能说明
DEM Extraction Wizard DEM自动提取向导
NEW 新建DEM自动提取向导工程
USE Previous File 打开DEM自动提取向导工程文件
Select Stereo GCPs 选择立体像对的地面控制点(GCP)
Select Stereo Tie Points 选择立体像对的连接点(Tie)
Build Epipolar Images 创建核线图像
Extract DEM 提取DEM,需要控制点文件、连接点文
件等外部辅助文件。
Edit DEM Result 编辑DEM结果
Stereo 3D Measurement 立体3D量测工具
Epipolar 3D Cursor 核线图像3D光标工具
(3)选择DEM Extraction Wizard—New,打开DEM Extraction Wizard对话框(图11.10),包括9个小步骤。
(4)单击Select Stereo Images按钮,选择BANDA.TIF作为左视图像(Left image),BANDF.TIF作为右视图像(Right image)。一般推荐垂直获取图像(nadir- viewing)或者观测角度小的影像作为左视图,非垂直方向(off-nadir viewing)获取图像作为右视图。也可以通过简单对比立体像对两幅影像的地面分辨率,分辨率高的作为左视图。
(5)系统自动根据自带的星历参数文件获得图像区域的最大高程和最小高程,也可以根据已知信息手动输入。
(6)单击Next按钮,进入Step2操作。
图11.10 DEM Extraction Wizard Step1对话框
第二步定义地面控制点
DEM Extraction Wizard 的Step2共有三种控制点定义方法(图11.11)。
(1)No GCPS(relative DEM value only)
无控制点,选择这个选项得到的DEM是相对高程。
(2)Define GCPS Interactively
交互式选择控制点。选择这个选项后,单击Next按钮,打开交互定义地面控制点界面。控制点的选择过程与几何校正相似。
(3)Read GCPs From File
从外部文件(.pts)中读取控制点。
由于缺少地面控制点数据,故本实验中选择No GCPs(relative DEM value only),单击Next按钮,进入Step4操作。
图11.11 Step2选择定义地面控制点方式
第三步定义连接点
Step3提供了三种定义连接点的方法。
(1)Generate Tie Points Automatically
基于区域灰度匹配法自动寻找重叠区的连接点,如图11.12所示。
以下是几个参数的说明:
连接点数目(Number of Tie Point):60。需要寻找连接点的数量。
搜索窗口大小(Search Windows size):481。大于或等于21的任意整数,并且必须比移动窗口大。该参数的值越大,找到匹配点的可能性也越大,但同时要耗费更多的计算时间。大致确定搜索窗口大小的方法是:在立体像对(带有粗略地理坐标)的两个图像上找到一个同名点,量测这两个图像上同名点间的距离D(像素单位),搜索窗口大小可设置为(D+1)x2。
移动窗口大小(Moving Window size):41。在搜索窗口中进行检查,寻找地形特征匹配的小区域。移动窗口大小必须是奇数。最小的移动窗口大小是5,即为5x5像素。使用较大的移动窗口将会获得更加可靠的匹配结果,但也需要更多的处理时间。移动窗口的大
小跟图像空间分辨率有关系,参照如下设置:
◆大于等于10m分辨率图像,设置值的范围是9~15;
◆5~l0m分辨率图像,设置值的范围是11~21;
◆1~5m分辨率图像,设置值的范围是15~41;
◆小于1m分辨率图像,设置值的范围是21~81或者更高。
平均高程(Region Elevation):自动从图像读取,根据提供的RPC文件计算得到。
是否检查连接点(Examine and Edit Tie Point):Yes。如果选择“Yes”,单击Next 按钮,进入查看/添加/编辑连接点步骤(Step5);选择No,直接跳过查看/添加/编辑连接点步骤(Step5)。
图11.12 Step4自动寻找重叠区的匹配点
(2)Define Tie Point Interactively
人工交互式定义连接点(至少需要定义9个连接点)。选择此选项单击Next按钮进入查看/添加/编辑连接点步骤(Step5)(图11. 12)。
(3)Read Tie Points From File
读取外部连接点文件(.pts)。Examine and Edit Tie Points项如果选择“Yes”,单击Next 按钮,进入查看/添加/编辑连接点步骤(Step5);选择No,直接跳过查看/添加/编辑连接点步骤(Step5)(图11. 12)。
本例中选择的是Generate Tie Points Automatically。按照上述内容设置好参数后单击Next 按钮,进入查看/添加/编辑连接点步骤step5(图11.13)。利用这个对话框上的功能按钮手动添加新的连接点,编辑已选择的连接点。每个按钮命令的功能说明如表11.4所示。当连接点数量大于9个,且最大Y方向视差(Maximum Y Parallax)的值小于10(以像素为单位)时,单击Next按钮,进入Step6。
图11.13 Step5查看/添加/编辑连接点
注:
1.如果最大Y方向视差大于10,需要编辑自动寻找的Tie点。单击Show Table,选择Sort Table By Error,误差大的点排在前面,逐个选择Tie点查看精度,将偏离较大的点进行微调或者直接删除。
2.自动寻找的Tie点分布有间隙,可以手动增加一些点,充分利用Predict Left(或Right)预测功能可以提高效率。
3.可先单击Delete ALL删除所有点,再单击Restore加载提供的Tie.pts文件。
表11. 4 查看/添加/编辑连接点界面按钮命令及功能说明
按钮名称功能
Go to 定位到当前选择的连接点
Add 将左右图像的光标定位到同一位置,单击此按钮新增连接点。
Update 选择一个需要编辑的连接点,移动左右图像的Zoom窗口的十字
光标重新定位一个新位置。单击此按钮,用当前位置更新连接点
的位置。
Reset 重设当前选择的连接点回到最初位置,取消之前对该点的所有编
辑。
Delete 删除当前选择的连接点
Delete All 删除所有连接点
Show/Hide Table 打开/关闭连接点列表
Save 将定义的连接点保存为外部文件
Restore 打开外部连接点文件
Predict Left 在右图像定位一个连接点后,利用此按钮可在左图像上预测大概
位置。
Predict Right 在左图像定位一个连接点后,利用此按钮可在右图像上预测大概
位置。
Params 设置预测点参数,包括搜索窗口和移动窗口的大小。
在Step6中(图11.14),利用连接点计算生成核线图像(Epipolar Image )。核线图像描述了立体像对之间的像素关系,可以利用立体眼镜浏览3D效果。
图11.14 Step6输出核线图像
该模块包括:
(1)分别为左、右核线图像选择保存路径及文件名。
(2)核线图像缩放系数(Epipolar Reduction Factor),默认值为1(不缩放)。
(3)单击RGB=Left、Right、Right或者RGB=Right、Left、Left按钮,在Display窗口中显示核线图像(图11.15),可以利用立体眼镜浏览3D效果。
图11.15 显示核线图像
(4)单击Next按钮。进入设定输出参数步骤Step7。
第四步设定输出参数
Step7可设定输出DEM的投影参数、像元大小和范围(图11.16)。单击Next按钮,进入Step8。
图11.16 Step7设定输出DEM的投影参数、像元大小和范围Step8可以设定DEM输出参数(图11.17)。
(1)需要设定如下参数:
最小相关系数阈值(Minimum Correlation):范围为0~1,用以评价两个点匹配好坏。阈值越大,匹配精度越高,能得到的匹配点越少。一般设定为0.65~0.85。
背景值(Background V alue):DEM的背景像素值。
外边界清理焊缝(Edge Trimming):范围为0.0~0.6。设定输出DEM外边界清理焊缝宽度,用占整个DEM的百分比来表示。
移动窗口大小(Moving Window Size):定义计算两图像相关性的范围大小,用来执行图像匹配,值越大越可靠,精确的匹配结果越少,计算量越大。
地形地貌(Terrain Relief):分为Low、Moderate和High三个级别。Low用于覆盖区域地形平坦;Moderate用于大多数地形;High用于山区,地形、地貌变化明显的区域。
地形细部(Terrain Detail):设置DEM地形细节等级。等级越高,生成的DEM越精细,处理时间越长。
数据输出类型(Output Data Type):16位的Integer和32位的Floating Point。
(2)选择DEM输出路径及文件名。
(3)单击Next按钮,执行DEM生成过程,进入Step9(图11.18)。
第五步输出DEM及检查结果
Step9已经产生了DEM结果(图11.18),单击Load DEM Result to Display按钮,可将产生的DEM结果显示在Display窗口中(图11.19)。
图11.17 Step8设定生成DEM参数图11.18 Step9产生DEM结果
图11.19 生成的DEM
第六步编辑DEM
在Step9(图11.18)中,单击Load DEM Result to Display with Editing Tools按钮,出现编辑窗口,对生成的DEM可以进行编辑(具体操作见下一节)。
单击Save按钮,将整个操作流程保存为工程文件;单击Finish按钮,完成整个DEM 的提取流程。
11.3.3 编辑DEM
在ENVI5.0中编辑DEM有两种方法,一种是在DEM自动提取向导的Step9中,单击Load DEM Result to Display with Editing Tools按钮,可以打开DEM编辑工具并将DEM数据显示在Display中。另一种是在主菜单中,选择Topographic—DEM Extraction—Edit DEM Result,打开DEM编辑工具。DEM编辑工具提供如下表所列的7种DEM数据高程值编辑方法。
表11.5 编辑DEM高程值的7种方法vii
方法说明
Replace with value 用指定的值替换感兴趣区内的高程值,需要设定一个替代常量。Replace with mean 用感兴趣区内原来的平均高程值替换整个感兴趣区内的高程值。Smooth 对感兴趣区内做低通卷积滤波,需要设定一个卷积核,默认为3x3。Median Filter 对感兴趣区内做中值卷积滤波,需要设定一个卷积核,默认为3x3。Noise Removal 如果感兴趣区内原高程值大于其周围高程值的标准差,则用周围高
程值的中值代替。
Triangulate 用三角内插算法对感兴趣区内的高程值重新插值。
Thin Plate Spline 用薄板样条插值算法对感兴趣区内的高程值重新插值。
编辑DEM的具体操作步骤如下:
(1)在主菜单中,选择Topographic—DEM Extraction—Edit DEM Result,在文件选择框中选择需要编辑的DEM数据,打开DEM编辑工具(图11. 20)。
(2)选择ROI定义窗口(Window):本实验中选择Image。
(3)选择ROI定义类型(Type):选择Polygon。
(4)选择像素值编辑方法(Method):选择Replace with mean。
(5)在Image窗口单击鼠标左键绘制多边形,单击鼠标右键闭合多边形。
(6)在DEM Editing Tool对话框中,单击Apply to Region of Interest按钮,执行编辑。
(7)在Image窗口中,单击鼠标中键删除已绘制的ROI区域,重复上述5-6步骤继续编辑其它区域的DEM。
(8)在Undo功能区内显示了编辑次数,利用Undo Last Edit或者Undo All Edit按钮可以取消之前或所有的编辑操作。
(9)完成所有的DEM编辑区域后,单击Save Changes按钮,保存修改结果。
图11. 20 DEM编辑窗口
11.3.4 立体3D量测工具
立体3D量测工具(The Stereo Pair 3D Measurement Tool),可以从两幅立体像对中量测一个点的高程信息,并可以输出为ASCII文件、EVF矢量文件和ArcView 3D shapefi1e
文件。
具体操作过程如下:
(1)在主菜单中,选择File—Open Image选择BANDA.TIF和BANDF.TIF文件打开。
(2)在主菜单中,选择Topographic—DEM Extraction—Stereo 3D Measurement,选择BANDA.TIF作为左视图像(Left Stereo Pair Image),选择BANDF.TIF作为右视图像(Right Stereo Pair Image)。打开Stereo 3D Measurement Tool对话框(图11.21)。
(3)在左图像或右图像窗口中,用Zoom的十字光标定位到需要收集的点位。单击Pre- dict Right或者Predict left按钮可以预测另外一个图像上对应位置。如果预测精度太差,单击Params按钮,将Search Window size的值调大一些,或者手动进行调整。
(4)单击Get Map Location按钮,获取当前位置坐标。
(5)单击Export Location按钮,导出坐标信息(图11. 22)。
(6)在ENVI Point Collection对话框中,可以查看所有收集的点坐标信息。选择File —Save Point As选择一种保存格式。
图11.21 Stereo 3D Measurement Tool对话
框
图11.22 导出的坐标信息
11.3.5 核线图像3D光标工具
核线图像3D光标工具(Epipolar 3D Cursor),可以在3D立体视图环境中,基于已存在的核线立体图像作3D量测,并可以输出为ASCII文件、EVF矢量文件和ArcView 3D shapefi1e文件。
使用这个工具之前,必须确保有核线图像构成立体像对。生成核线图像的方法有两种,一是可以在DEM自动提取向导的Step6(图11.14)中的Generating Epipolar Image中生成,也可以利用主菜单—Topographic—DEM Extraction—Build Epipolar Images生成。
(1)在主菜单中,选择Topographic—DEM Extraction—Epipolar 3D Cursor。分别选择已生成的左右核线图像。单击OK按钮,则左核线图像作为红色波段、右核线图像作为蓝色波段显示在Display中,同时打开Epipolar 3D Cursor对话框(图11.23)。
图11.23 Epipolar 3D Cursor对话框
(2)在主图像窗口中,鼠标显示为红色和蓝色指针。当用立体眼镜观察时,两个指针合并为一个指针。指针的控制是通过鼠标和键盘来完成的。
鼠标移动:移动3D指针
鼠标左键:使3D指针吸住(Snap)地面
鼠标中键:将当前点的(x,y,z)坐标导入ENVI Point Collection Table中
向上箭头(键盘):向上移动3D指针一个像素单位
向下箭头(键盘):向下移动3D指针一个像素单位
向右键头(键盘):向右移动3D指针一个像素单位
向左箭头(键盘):向左移动3D指针一个像素单位
加号(+)(键盘):增加3D指针表观高程
减号(-)(键盘):减少3D指针表观高程
(3)在主图像窗口中,移动鼠标到需要收集的位置,单击鼠标左键使得3D指针吸住(Snap)地面。
(4)如果对3D指针定位位置满意,单击鼠标中键可以将当前点的(x,y,z)坐标导入ENVI Point Collection Table中。
11.4 等值线插值生成DEM
11.4.1 矢量等高线插值DEM
等值线(Contour)是DEM 的一种表达方式,是由数值相同的点依次连接而成的曲线。等值线插值法是比较常用的DEM生成算法,它根据局部等值线上的高程点,通过插值公式计算各点的高程,得到DEM。ENVI的Convert Contours to DEM工具采用线性(Linear)或五次多项式内插(Quintic)插值算法,对矢量等高线进行插值,输出一个连续的栅格DEM 文件。
矢量数据必须是ENVI矢量格式数据(. evf)。如果矢量数据是其它格式(如Shapefile),在ENVI中打开该格式的文件ENVI会自动将该格式的矢量数据转换成ENVI矢量格式。EVF 文件必须包含用于指定每个矢量等高线的高程属性文件,即.dbf文件。图11.24为本节实验所需的矢量等高线文件。该等高线是在ArcGIS中利用已有的DEM数据提取获得的。
图11.24 矢量等高线文件
启动Convert Contours to DEM工具有两种方式:可以通过主菜单选择Topographic—Convert Contours to DEM;也可以选择vector—Convert Contours to DEM。
选择矢量等高线数据,打开Convert Vector Elevation Contours to Raster DEM对话框(图11.25),需要定义如下参数。
(1)高程属性字段(Elevation Attribute Column):选择存储高程信息的字段。
(2)设置有效高程范围(Va1id Elevation Range):可选项,设置用于插值的高程值。
(3)输出像元大小(Output pixel Size):根据矢量信息自动计算一个值,如重新设置一个值,要适当大于矢量节点的采样距离。
(4)输出数据类型(Type):根据高程值覆盖范围选择一个数据类型,本例中选择Integer。
(5)插值算法(Gridding Interpolation Method):线性(linear)或者五次多项式内插(Quintic)。
(6)是否外推图像边沿(the Extrapolate Edge of Image):Yes或No。
(7)选择空间子集(Spatially Subset Output DEM):基于地图坐标范围(Map)或者文件(File)。
(8)定义输出投影参考(Select Output Projections):WGS-84,Zone49。
(9)单击OK按钮,打开DEM Output Parameters对话框,选择DEM输出路径及文件名,单击OK按钮,执行操作。得到DEM图像(图11.26)。
图11.25 Convert Vector Elevation Contours to Raster DEM对话框
数字地面模型地形指标和地形特征信息的提取
地理教学实验中心 专业实训实习报告 备注:根据实际要求可加附页。电子文本与此等效。
1.坡度和坡向的提取 1)坡向的提取:打开ArcGis里面的ArcToolbox,在工具箱中选择3D分析—栅格表面—双击坡向—输入栅格dem2-输出栅格aspect2 图1.1.1 图1.1.2 2)坡度的提取:同上打开坡度对话框输入栅格dem2—输出slope2 图1.2.1
图1.2.3 2.坡度变率的提取 1)对生成的坡度再求坡度,打开坡度对话框—输入上一步生成的坡度slpoe2-输出sos2 图2.1.1 图2.1.2
3.坡向变率的提取 1)先求反地形--Spatial Analyst工具—地图代数--栅格计算器—输入公式为2375-dem2输出fan-保存OK。 2)将反地形加载到窗口中求反地形的坡向,命名为aspect2 fan 3)求原地形的坡向的坡度soa1,求反地形坡向的坡度命名为soa2 4)打开栅格计算器—输入公式为soa =soa (soa1+soa2-Abs(soa1-soa2))/2。输出结果为soa即为坡向变率. 4.地形起伏度的提取 1)提取最大值:将dem2加载到ArcMap中,启动ArcToolbox—Spatial Analyst工具—邻域分析—焦点统计-输入dem2-输出max,采用矩形窗口大小为11*11,打开统计类型,选中最大值—OK,生成的新的dem与原始dem最小海拔不同,发生了变化, 图4.1.1 2)最小值:邻域分析—矩形邻域大小为为11*11,选中最小值,点击确定生成最小值 3)地图代数--栅格计算器—最大值dem- 最小值dem—选择存储位置,命名为地形起伏度—OK,地形起伏度提取完成。 5.地面粗糙度的提取 1)求取坡度,启动栅格计算器最小值为1,最大值为2.4739
地形图数字化
地形图数字化
————————————————————————————————作者: ————————————————————————————————日期: ?
地形图数字化 武汉大学测绘学院 潘正风 数字地形图除采用地面数字测图方法外,也可采用地形图数字化方法。采用常规测图方法测绘的图解地形图通过地形图数字化,可转换成计算机能存储和处理的数字地形图,但其地形要素的位置精度不会高于原地形图的精度。地形图数字化方法按采用的数字化仪不同分为手扶跟踪数字化和扫描屏幕数字化。 一.手扶跟踪数字化 1.跟踪数字化仪 数字化仪输出的数据是数字化仪坐标系的坐标。 2.数字化仪坐标转换成地形图测量坐标 ()()()()? ???-+?+-?=-?-+?-?=-αλαλαλαλcos sin sin cos 00v y u x Y Y v y u x X X
? ??++-=++=y x Q ay bx Y Q by ax X 式中,x Q 、y Q 、a 和b 为待定换算系数。 3.手扶跟踪地形图数字化方法 ⑴ 地形图定位 进行地形图定位,计算坐标转换系数。 ⑵ 菜单定位 菜单定位完成后,菜单区内某一位置的行号和列号都可由数字化仪坐标换算出来。在地图数字化系统程序中,每一对行号和列号都和方格所对应的代码或程序功能已联系起来,因此,只要在数字化地形图要素之前或之后,将数字化仪游标移到菜单区相应的地形图图式符号的小方格内,这样就把该地形图要素的代码和图形的坐标(几何位置)连在一起,形成一个规定格式的数据串储存在计算机内。数字化菜单除用于输入图形要素代码外,还可输入程序执行命令,进行数字化数据的处理和屏幕图形的编辑,作为人机交互系统中的一个输入设备。 ⑶ 地形图符号的数字化 4.利用数字化仪在地形图上量算面积 ()()∑=++-+=n i i i i i y y x x P 1 1121 或 ()∑=++-=n i i i i i y x y x P 11121 式中,n为多边形顶点的个数,11x x n =+,11y y n =+。
地形图基本知识
地图学基础知识 1.什么是地图? 地图是按照一定的法则,有选择地以二维或多维形式与手段在平面或球面上表示地球(或其它星球)若干现象的图形或图像,它具有严格的数学基础、符号系统、文字注记,并能用地图概括原则,科学地反映出自然和社会经济现象的分布特征及其相互关系。 2、什么是数字地图? 数字地图是存储在计算机的硬盘、软盘、光盘或磁带等介质上的,地图内容是通过数字来表示的,需要通过专用的计算机软件对这些数字进行显示、读取、检索、分析。 3、什么是栅格图? 栅格图是基于一套行列组成的方格数据模型,使用一组方格描述地理要素,每一个方格的值代表一个现实的地理要素。 栅格数据适合于做空间分析和图象数据格式的存储,不适合做不连续的数据处理。 4、什么是数字栅格地图(DRG)? 数字栅格地图(DRG)是纸质地图的栅格数字化产品。每幅图经扫描、几何纠正、图幅处理与数据的压缩处理,形成在内容、精度和色彩上与地图保持一致的栅格文件。 5、什么是栅格图像? 栅格图像,也称光栅图像,是指在空间和亮度上都已经离散化了的图像。我们可以把一幅栅格图像考虑为一个矩阵,矩阵中的任一元素对应于图像中的一个点,而相应的值对应于该点的灰度级,数字矩阵中的元素叫做像素。数字图像与马赛克拼图相似,是由一系列像素组成的矩形图案,如果所有的像素有且仅有两个灰度级(黑或白),则称其为二值图像,也即位图;否者称其为灰度图像或彩色图像。 6、什么是矢量图? 矢量图是基于直角坐标系统,用点、线、多边形描述地理要素的数据模型或数据结构。每一个地理要素由一系列有顺序的的x、y坐标描述,这些要素与属性相结合。 7、为什么要将栅格地图矢量化? 纸质地图经扫描仪扫描后,初步保存为栅格图像(常见的格式有TIFF、BMP、PCX、JPEG等)。栅格图像在地理应用领域有着这样的缺陷:首先,栅格图像文件对图像的每一像素点(不管前景或背景像素)都要保存,所以其存储开销特别大。另外,我们不能对图像上的任一对象(曲线、文字或符号)进行属性修改、拷贝、移动及删除等图形编辑操作,更不能进行拓扑求解,只能对某个矩形区域内的所有像素同时进行图像编辑操作。此外,当图像进行放大或缩小显示
1_500地形图测绘总结
东阿县牛角店镇公路土方1:500数字地形图测绘技术总结 聊城市经纬测绘有限公司 2014年11月
目录 一、任务概述 (3) 1.1 任务来源 (3) 1.2完成任务内容 (3) 1.3工作流程 (4) 1.4平面控制............................................ 错误!未定义书签。 1.5 数字化地形测量 (8) 二、技术设计执行况 (5) 2.1 作业技术依据 (5) 2.2设计书执行情况 (5) 2.3作业中的问题和处理 (6) 2.4质量保证措施 (6) 2.5新技术和方法的应用 (8) 2.6经验与教训 (8) 三、质量说明与评价 (8) 四、上交资料清单 (8)
一、任务概述 1.1 任务来源 本测绘项目为配合东阿县牛角店镇南公路规划、设计及后期建设等工作,我公司受东阿县国土资源局委托提供地形图和测量控制成果,测绘地形图60490平方米(合91亩)。 1.2 完成任务内容 2014年11月中旬,组成以东阿县国土资源局为主,土地局部分人员参与的城市1:500数字化地形图测绘队伍共7人,分2个作业组。工程师2人,助理工程师及技术员5人。 2、设备配置: 3、任务完成情况 完成了测区的控制测量、地形测量、资料整理以及测绘成果的检查和验收。共布设图根点9个,测绘1:500地形图面积60490平方米。 1.3 工作流程
1.4 平面控制 平面坐标系采用:国家1980西安坐标系 高程系统采用:1985国家高程基准 起算点由山东省卫星连续运行站中心提供差分数据结算坐标、高程
1.5 数字化地形测量 该测区地形测量采用解析法全站仪施测地物点,地物点施测测站均设在首级控制点或图根导线点上,对部分较隐蔽地物点采用支导线或支点施测,对最困难的地物点采用皮尺丈量或交会法等作业方式施测地物点,点位精度和解析量达到《城市测量规范》(原国家土地局TD1001-93)规定要求。 《CASS》系统是在Auto-CAD平台上开发的多用途数字地形测绘与管理系统,其功能较强,图形编辑直接采用Auto-CAD平台进行,编辑时,按照附表要求进 向认真按《1:500、1:1000、1:2000地形图图式》规定和本设计书执行。 二、技术设计执行情况 2.1 作业技术依据 (1)《全球定位系统(GPS)测量规范》(GB/T18314-2001); (2)《国家三、四等水准测量规范》(GB12898-91); (3)《工程测量规范》(GB50026-2007); (4)《水利水电工程测量规范》(SL197-97) (5)《1:500 1:1000 1:2000 地形图图式》(GB/T7929-1995); (6)《1:500、1:1000、1:2000外业数字化测图技术规程》(GB/T 14912-2005); (7)《测绘技术设计规定》(CH/T 1004-2005); (8)《数字测绘产品检查验收规定和质量评定》(GB/T18316-2001) ; (9)该项目技术设计书 2.2设计书执行情况 作业过程中,一般情况下严格执行设计书要求的各项内容,特殊情况下,经县国土资源局主管部门和设计方的同意,执行情况作了修改。
ENVI提取地形特征要素
ENVI 实验六基本地形因子提取 一、实验目的 1熟悉ENVI软件能够从DEM 中提取地形特征。 2掌握DEM提取地形特征的方法。 二、实验要求 完成运用ENVI 进行从DEM 中提取地形特征,包括山顶、山脊、平原、水平面、山沟和凹谷。 三、实验仪器 每人计算机一台。 四、实验内容 1在Toolbox中,启动/Terrain/Topographic Features,在Topographic Feature Input DEM 对话框中,选择DEM.tif 文件,点击OK,打开Topographic Features Parameters 对话框,需要设置一些参数。 (1)坡度容差:1。以度为单位;(2)曲率容差:0.1;(3)地形核大小:7。 2在Select Feature to Classify 列表中选择所有的地形特征。 3选择输出路径及文件名,单击OK 执行地形特征提取。
4通视域分析:使用Viewshed Analysis Workflow 工具,设置点、线、面作为观测源进行可视域分析。 将通视分析结果输出为矢量和图像结果有三种方法: (1)点观测源 a. 在Toolbox 中,启动/Terrain/Viewshed Analysis Workflow,打开文件选择面板 File Selection; b. 分别选择对应的文件DEM File:DEM.tif;Image File:Orthoimagery.tif,单击Next 进入Viewshed Analysis 面板; c.在Viewshed Analysis 面板中,设置以下几个参数: 可视距离Default View Range:1000 可视高度Default View Height:100 d.默认鼠标的状态是绘制“点注记”,在正射影像上绘制几个观测点。如果鼠标当前 状态是其他,可在工具栏中选择对应的工具绘制:,绘制4 个点; e.选择Any Source (四个观测点的并集),勾选Preview预览结果,红色表示可 视区域,黑色表示不可视区域; f.分别选择All Sources(四个观测点的交集),预览结果; g.单击Next进入Viewshed Export面板,可以将通视分析结果输出为矢量和图像结果。
1:500数字化地形图测绘项目技术设计书.docx
1:500 数字化地形图测绘 项目技术设计书 1概述 1.1 任务来源 随着 ××市××城区的快速发展,该市原有的地形图已不能 满足当前规划设计的要求,因此,××市住房和城乡建设局委托我院 在××城区西南方向的 ××、××及××片区增测1:500数字化地形图,以满足城市规划设计和管理的需要。 1.2 工作内容和范围 测区位于 ××市××城区西南方向的 ××片区、××片区一带,分为二个独立区块,测图具体范围由 ××市住房和城乡建设局派人实 地指定。 任务内容包括1:500 数字化地形图测绘,用1980 西安坐标系施测,并将 1980 西安坐标系的地形图转换为1954 年北京坐标系,具 体包括: ( 1)测区控制测量; (2)1:500 数字化地形图测绘,并将所测绘的1:500 数字化图地形图缩编为1:1000 地形图( 80 坐标),面积约 6 平 方公里;
(3)将 1980 西安坐标系的1:500 数字化地形图转换为 1954 年北京坐标系地形图。 (4)在 2009 年城区地形图测绘成果的基础上,增加图幅分幅编号,并完善原有图幅结合表(电子版); 2作业区自然地理概况和已有资料情况 2.1 作业区自然地理概况 ×× 市×× 城区地处××省西北、云贵高原南麓,是大西南通向沿海港口的重要通道, 城区介于东经108°00'~ 108°07'、北纬 24°39'~ 24°45'之间。 测区地处××城区西南方向城郊结合部,测图范围主要分布有××、××村及京峒等 3 个村庄,该项目东北面接边地区2009 年已测过 1:500 地形图。 国道 G323横穿测区,测区大车路、乡村小路不多,交通条件一般。 植被以耕地、树林、灌木林和草地为主;测区属丘林地带,部 分地方树木较多,通视条件困难。 2.2 已有资料情况 测区现有资料情况: (1)测区附近有国家 GPS C级网,可作为一级 GPS控制网的起算点。 (2)测区内有 1/1 万、1/5 万地形图,可以作为测区实地踏勘和
数字地形图测绘技术设计书
***1:200数字地形图测绘 技术设计书 1 概述 1.1 任务来源 为满足****施工建设的需要,受****(以下简称工程公司)的委托,对*****进行1:200数字地形图测绘工作。 本项目因工期紧迫,且测区草木茂盛,荆棘丛生,通视条件极差,为此成图方法采用GPS RTK配合全站仪进行全野外数字采集成图。 1.2 测区范围 测区位于******两个片区,以委托方指界为测区范围线,约*** km2(以最终成图面积为准)。 2 测区概况 *****位于****市***北面,属***辅助工程。能够保证***正常运行,峰荷发电、灌溉、供水四种功能,主要作用是反季节调解水量,缓解***水库放水时对河道的冲刷。测区道路较发达,交通尚属方便。测区周边地形为高山,中间形成洼地,主要种植经济作物。 3 已有资料 3.1 控制点成果 测区周边有GPS控制、三等水准点,高程属1956国家高程,可作为平面和高程之起算。 3.2 地形图资料 本测区有1:500地形图可以作为工作用图。 4 基本技术要求 4.1作业依据 (1)《1:500 1:1000 1:2000外业数字测图技术规程》GB/T14912-2005 (2) GB/T 20257.1-2007《1:500,1:1000,1:2000地形图图式》,以下简称《图
式》 (3) CJJ 73-97《全球定位系统城市测量技术规程》 (4) CJJ 8-99《城市测量规范》,以下简称《规范》 (5) GB 12898-91《国家三、四等水准测量规范》 (7) CH/T 1004-2005《测绘技术设计规定》 (8) CH/T 1001-2005《测绘技术总结编写规定》 (9) GB/T 18316-2008《数字测绘成果质量检查与验收》 (10) 本《技术设计书》 4.2数学基础及等高距 (1)平面坐标系:控制点提供***施工坐标系,成图基准采用***施工坐标系。 (2)高程系统:1956国家高程基准。 (3)等高距:测图比例尺为1:200,基本等高距为0.5m。 4.3 产品内容 (1)控制点成果表,包括***施工坐标系及图根控制点成果表。 (2)按照标准分幅(50cm×50cm)全要素1:200数字线划图数据; (3)根据验收合格的街坊图数据编制标准分幅(50cm×50cm)的全要素1:200数字地形图数据; 4.4 图幅分幅及编号 (1)采用50×50cm 的正方形分幅。 (2)地形图采用正方形分幅,规格为50cm×50cm,图幅分幅编号采用1:500地形图50cm×50cm的基本图幅的西南角坐标的X、Y为行列数作为基本编号,X 坐标,Y坐标公里数在后,地形图取至0.01km(如10.40-27.75.)。 4.5成图精度 4.5.1.平面精度 (1)图上地物点对最近野外控制点的平面位置中误差不得大于下表所列中误差。
地形特征信息提取
地形特征提取 1.背景 特征地形要素,主要指对地形在地表的空间分布特征具有控制作用的点、线或面状要素。特征地形要素构成地表与起伏变化的基本框架。与地形指标的提取主要采用小范围的邻域分析不同的是,特征地形要素的提取更多地应用较为复杂的技术方法,如山脊线、山谷线、沟沿线等的提取采用了全局分析法,成为栅格数据地学分析中很具特色的数据处理内容。 特征地形要素从表示的内容上可分为地形特征点和特征线两大类。地形特征点主要包括山顶点、凹陷点、脊点、谷点、鞍点、平地点等。基于DEM提取地形特征点,可利用3*3或更大的栅格窗口,通过中心格网点与8个邻域格网点的高程关系来进行判断获取。 山脊线和山谷线构成了地形起伏变化的分界线(骨架线),因此它对于地形地貌研究具有重要意义。另一方面,对于水文物理过程研究而言,由于山脊、山谷分别代表示分水性与汇水性,山脊线和山谷线的提取实质上也是分水线与汇水线的提取。 自动提取山脊线和山谷线的主要方法都是基于规则格网DEM数据的,从算法设计原理上来分,大致可以分为以下五种: (1)基于图像处理技术的方法 (2)基于地形表面几何形态分析的方法 (3)基于地形表面流水物理模拟分析方法 (4)基于地形表面几何形态分析和流水物理模拟分析相结合的方法 (5)平面曲率与坡形组合法 其中,平面曲率与坡形组合法提取的山脊线、山谷的宽度可由选取平面曲率的大小来调节,方法简便,效果好。该方法基本处理过程为:首先利用DEM数据提取地面的平面曲率及地面的正负地形,取正地形上平面曲率的大值即为山脊线,负地形上平面曲率的大值即为山谷。实际应用中,由于平面曲率的提取比较复杂繁琐,而坡向变率(SOA)在一定程度上可以很好地表示平面曲率,因此,下面的提取过程以SOA代替平面曲率。 2.目的 通过本实例,使读者掌握山脊线和山谷线这两个基本地形特征信息的理论及其基于DEM的提取方法与原理。同时,熟练掌握利用ArcGIS软件对这两个地形特征信息的提取方法。 3.要求: 利用所给区域DEM数据,提取该区域山脊线、山谷线栅格数据层。 具体提取过程: 1)点击DEM数据,使用表面分析中的坡向(Aspect)工具,提取DEM的坡向数据层,命名为A。
数字地形图测绘毕业设计
1:500数字地形图测绘
。 -可编辑修改-
摘要 数字测图是一种全解析的计算机辅助测图方法,与图解法测图相比,其具有明显的优越性和广阔的发展前景。它将成为地理信息系统的重要组成部分。从而实现丰富的地形信息、地理信息数字和作业过程的自动化或半自动化,尽可能缩短野外测图时间,减轻野外劳动强度,而将大部分作业内容安排到室内去完成,与此同时,将大量手工作业转化为计算机控制下的自动操作,这样不仅减轻劳动强度,而且不会损失观测值精度。 本文首先介绍了数字地形图测绘的基本知识,数字测图的原理和流程,其中也包括技术指标和成图精度。接着是我们如何进行平面及高程控制的思想、步骤以及相对的要求。完成控制作业后我们进行了全站仪外业测绘数据采集,紧接着介绍了数据的处理方法和使用软件成图的具体实施步骤。比如:CASS软件的使用、数字传输与展点、绘制平面图、编辑与整饰以及到最后的成果输出。在数字测图工作的过程中也是对测量基础知识的复习,巩固和加深理解的过程。在这次作业中从思想上我深刻体会到从事测绘行业所要付出的艰辛之外,我也学到了专业之外的东西就是成员之间要有团队精神,任何一项测绘工作的顺利完成都是一个团队共同努力的结果。 本文根据工作实践对在测绘专业教学中对数字测图课程的教学体会予以阐述。 关键字:测图;全站仪;大比例尺;碎部点;导线
。 -可编辑修改-
毕业设计报告 目录 第1章绪论 (1) 1.1 数字测图的概述 (1) 1.1.1 任务概述 (2) 1.1.2 测区概况 (2) 1.2 已有控制点成果 (2) 1.3 数字测图原理及流程 (4) 1.4成果主要技术指标和规格 (4) 1.4.1 技术指标 (4) 1.4.2 成图精度 (4) 第2章平面及高程控制 (6) 2.1 平面坐标系统的选择 (6) 2.1.1 平面坐标系及基准 (6) 2.1.2 主要精度指标 (6) 2.2 平面控制测量原理 (6) 2.2.1 平面控制测量流程 (6) 2.2.2 选点踏勘 (7) 2.2.3 距离测量 (8) 2.2.4 角度测量 (9) 2.2.5 平差易的使用 (13) 2.3 高程控制测量原理 (16) 1
1:500地形图测绘总结
XX县XXX镇公路土方 1:500数字地形图测绘技术总结 XXXXXXX测绘有限公司 2014年11月 目录 一、任务概述 (2) 1。1 任务来源 (2) 1。2完成任务内容 (2) 1.3工作流程 (3) 1。4平面控制............................................ 错误!未定义书签。 1.5 数字化地形测量 (8) 二、技术设计执行况 (4) 2。1 作业技术依据 (4) 2.2设计书执行情况 (4) 2.3作业中的问题和处理 (5) 2.4质量保证措施 (5) 2。5新技术和方法的应用 (7) 2。6经验与教训 (7) 三、质量说明与评价 (7)
四、上交资料清单 (7) 一、任务概述 1。1 任务来源 本测绘项目为配合XX县XXX镇南公路规划、设计及后期建设等工作,我公司受XX县国土资源局委托提供地形图和测量控制成果,测绘地形图60490平方米(合91亩)。 1.2 完成任务内容 2014年11月中旬,组成以XX县国土资源局为主,土地局部分人员参与的城市1:500数字化地形图测绘队伍共7人,分2个作业组。工程师2人,助理工程师及技术员5人。 2、设备配置: 3、任务完成情况 完成了测区的控制测量、地形测量、资料整理以及测绘成果的检查和验收.共布设图根点9个,测绘1:500地形图面积60490平方米. 1。3 工作流程
1.4 平面控制 平面坐标系采用:国家1980西安坐标系 高程系统采用:1985国家高程基准 起算点由XX省卫星连续运行站中心提供差分数据结算坐标、高程 1.5 数字化地形测量 该测区地形测量采用解析法全站仪施测地物点,地物点施测测站均设在首级
地形指标提取
地形指标提取 1.背景: 地形指标是最基本的自然地理要素,也是对人类的生产和生活影响最大的自然要素,地形特征广泛应用于诸多研究领域和应用领域。地形指标的提取对水土流失、土地利用、土地资源评价、城市规划等方面的研究起着重要的作用。根据研究区域尺度的不同,地形指标有许多因子。基于ArcGIS的地形指标的提取,大多均是基于DEM数据完成的。 2.目的: 通过本实验,使读者加深对各基本地形指标的概念及其应用意义的理解,熟练掌握使用ArcGIS软件提取这些地形指标的方法和步骤。 3.要求: 利用所提供的DEM数据,提取该区域坡度变率、坡向变率、地形起伏度、地面粗糙度等四个基本地形指标的栅格图层。 4.实验步骤: (1)坡度变率 地面坡度变率,是地面坡度在微分空间的变化率,是依据坡度的求算原则,在所提取的坡度值的基础上对地面每一点再求算一次坡度。即坡度之坡度。坡度是地面高程的变化率的求解,因此,坡度变率表征了地面高程相对于水平面变化的二阶导数。 坡度变率在一定程度上可以很好的反映剖面曲率信息,其提取方法如下: 1)选中DEM图层数据,选择表面分析中的坡度工具,提取坡度,得到坡度数据层,命名为Slope
2)选中坡度数据层Slope,对其再用上述的方法提取坡度,得到坡度变率数据,命名为SOS (2)坡向变率 地面坡向变率,是指在提取坡向基础上,提取坡向的变化率,亦即坡向之坡度(SOA),它可以很好的反应等高线弯曲程度。 地面坡向变率在所提取的地表坡向矩阵的基础上沿袭坡度的求算原理,提取地表局部微小范围内的最大变化情况。需要注意:SOA在提取过程中在背面坡将会有误差产生。北面坡坡向值范围为0~90度和270~360度,在正北方向附近,如15度和345度两个坡向之间坡向差只是30度,而计算结果却是330度。所以要将北坡地区的坡向变率误差进行纠正,具体方法如下: 1)求取原始DEM数据层的最大高程值,记为H,通过SpatialAnalyst下的栅格计算器Raster Calculator公式为H=0-DEM,得到与原来地形相反的DEM数据层,即反地形DEM数据。
最新1:500数字化地形图测绘项目技术设计书
1:500数字化地形图测绘项目技术设计书
1:500数字化地形图测绘项目技术设计书 1 概述 1.1 任务来源 随着××市××城区的快速发展,该市原有的地形图已不能满足当前规划设计的要求,因此,××市住房和城乡建设局委托我院在××城区西南方向的××、××及××片区增测1:500数字化地形图,以满足城市规划设计和管理的需要。 1.2 工作内容和范围 测区位于××市××城区西南方向的××片区、××片区一带,分为二个独立区块,测图具体范围由××市住房和城乡建设局派人实地指定。 任务内容包括1:500数字化地形图测绘,用1980西安坐标系施测,并将1980西安坐标系的地形图转换为1954年北京坐标系,具体包括: (1)测区控制测量; (2)1:500数字化地形图测绘,并将所测绘的1:500数字化图地形图缩编为1:1000地形图(80坐标),面积约 6平方公里;
(3)将1980西安坐标系的1:500数字化地形图转换为1954年北京坐标系地形图。 (4)在2009年城区地形图测绘成果的基础上,增加图幅分幅编号,并完善原有图幅结合表(电子版); 2 作业区自然地理概况和已有资料情况 2.1 作业区自然地理概况 ××市××城区地处××省西北、云贵高原南麓,是大西南通向沿海港口的重要通道,城区介于东经108°00'~108°07'、北纬24°39'~24°45'之间。 测区地处××城区西南方向城郊结合部,测图范围主要分布有××、××村及京峒等3个村庄,该项目东北面接边地区2009年已测过1:500地形图。 国道G323横穿测区,测区大车路、乡村小路不多,交通条件一般。 植被以耕地、树林、灌木林和草地为主;测区属丘林地带,部分地方树木较多,通视条件困难。 2.2 已有资料情况 测区现有资料情况: (1)测区附近有国家GPS C级网,可作为一级GPS控制网的起算点。
1:10000矢量核心地形要素数据(DLG)生产技术规定
1:10000基础地理信息更新与建库技术设计暂行规定 1:10000矢量核心地形要素生产技术规定Technical specifications for producing 1:10000 digital line graphics (DLG) of fundamental topographic features ( 征求意见稿) 国家测绘局 二○○一年一月
目次 前言 ........................................................................................................................................ I 1范围 (1) 2引用标准 (1) 3术语 (1) 4基本要求及技术指标 (2) 5作业方法与工艺流程 (3) 6数据采集技术要求 (7) 7操作规程 (10) 8质量控制 (14) 9数据更新 (15) 10文件命名和数据组织形式 (16) 11产品归档 (17)
前言 本规程是应1:10000数字化测绘和基础地理信息数据库中对1:10000核心地形要素生产技术规定的需要,根据目前技术水平制定的。 本规程由国家测绘局提出并归口。 本规程起草单位:陕西测绘局 山西省测绘局 本规程主要起草人:曹建成李建平
1:10000基础地理信息更新与建库技术设计暂行规定 1:10000矢量核心地形要素生产技术规定 Technical specifications for producing 1:10000 digital line graphics (DLG) of fundamental topographic features 1 范围 本规程规定了1:10000核心地形要素生产的技术要求、质量控制、工艺流程。适用于1:10000矢量核心地形要素的采集、更新与建库。其它专题矢量要素及相关复合产品的制作也可参照其执行。 2 引用标准 下列标准所包含的条文,通过在本规程中引用而构成为本标准的条文。在本规程出版时,所示版本均为有效。所有标准都会被修订,使用本规程的各方应探讨使用下列标准的最新版本的可能性。 GB/T 13990-92 1:5000、1:10000航空摄影测量内业规范 ZBCH02-85 1:5000、1:10000地形图航片综合判调作业规程 GB/T 5791-93 1:5000、1:10000地形图图式 GB/T 13923-92 国土基础信息数据分类与代码 GB/T17798-1999地球空间数据交换格式 GB/T××××1:10000矢量地形要素内容与分类 GB/T××××基础地理信息数字产品数据文件命名规定 GB/T××××基础地理信息数字产品元数据 GB/T 13989-92 国家基本比例尺地形图分幅与编号 GB 2260-95 中华人民共和国行政区划代码 GB 917.2-89 国家干线公路路线名称和编号 GB 1945-87 中华人民共和国铁路路线名称代号 SL213-98 水利工程基础信息代码编制规定 3 术语 3.1要素 真实世界现象的抽象。 3.2属性 各要素的相关信息。 3.3矢量数据 由几何元素点、线及多边形所表示的数据。 3.4栅格数据 与特定参照系相对应的空间的规则化棋盘状布置的数据。 3.5节点 零维拓扑元素。
基于ArcGIS的地形特征提取
基于ArcGIS的地形特征提取 刘小庆 辽宁工程技术大学,辽宁阜新 (123000) E-mail: Lxq_0805@https://www.360docs.net/doc/1819223260.html, 摘要:特征地形要素是构成地表地形与起伏变化的基本框架,ArcGIS具有一个能为三维可视化、三维分析以及表面生成提供高级分析功能的扩展模块3D analyst,基于ArcGIS进行地形特征提取可以更好地实现对地形地貌空间数据的可视化和分析处理。 关键词:ArcGIS;特征地形要素;山脊线;山谷线 1.引言 随着信息社会的到来,人类社会进入了信息大爆炸的时代。面对海量信息,人们对于信息的要求发生了巨大变化,对信息的广泛性、精确性、快速性及综合性要求越来越高。随着计算机技术的出现及其快速发展,对空间位置信息和其他属性类信息进行统一管理的地理信息系统也随之快速发展起来,在此基础上进行空间信息挖掘和知识发现是当前亟待解决的问题。 在常见的GIS系统中,美国ESRI公司的ArcGIS以其强大的分析能力得到用户的青睐,成为主流的GIS系统。ArcGIS9是美国环境系统研究所(Environment System Research Institute)开发的新一代GIS软件,是世界上最广泛的GIS软件之一。自从1978年以来,ESRI相继推出了多个版本系列的GIS软件,其产品不断更新扩展,构成适用各种用户和机型的系列产品。ArcGIS是ESRI在全面整合了GIS与数据库、软件工程、人工智能、网络技术及其他多方面的计算机主流技术之后,成功地推出了代表GIS最高技术水平的全系列GIS产品。ArcGIS是一个全面的,可伸缩的GIS平台,为用户构建一个完整的GIS系统提供完整的解决方案。ArcGIS9的软件特色主要为: 1)主图编辑的高度一体化; 2)便捷的元数据管理; 3)灵活的定制与开发; 4)ArcGIS9的新功能:增加了两个基于ArcObject的产品:面向开发的嵌入式ArcGIS Engine和面向企业用户居于服务器的ArcGIS Server。3D Analyst 是ArcGIS8的扩展 模块,主要提供空间数据的三维显示功能。在ArcGIS9中,该模块在3D Analyst的基 础上第一次推出全球3D可视化功能。该模块具有与ArcScene相似的地图交互工具,可以与任何在三维地球表面有地理坐标的空间数据进行叠加显示[1]。 2.背景和原理 特征地形要素,主要是指对地形在地表的空间分析与分布特征具有控制作用的点、线或面状要素。特征地形要素构成地表地形与起伏变化的基本框架。与地形指标的提取主要采用小范围的邻域分析不同的是,特征要素的提取更多地应用较为复杂的技术方法,如山谷线、山脊线、沟沿线等的提取采用了全局分析法(global process)(算法如图1)[2],成为栅格数据地学分析中很有特色的数据处理内容。
数字地图制图复习
. '. 简述数字地图、电子地图、模拟地图的基本概念与差别?数字地图是在一定坐标系统内具有确定坐标和属性标志的制图要素和离散数据在计算机可识别的存储介质上概括而有序的集合。具有计算机可识别性、可量算性、可分析性、可传输性及数字与模拟地图的互转性,是生产电子地图和纸质地图的基础。电子地图:是数字地图在计算机屏幕上的符号化显示,是计算机条件下的空间信息可视化,是人眼直接可视的,包括二维、三维电子地图。模拟地图:传统地图一般绘制印刷在布匹、木板、石板铜板和纸张等介质上,这种地图称为模拟地图。 数字地图的特性:可识别性:指计算机可识别,而目视一般不可识别;可量算:计算可进行几何度量,长度、面积、方位等; 可分析性:分析的深度取决于数据结构和数据模型; 可转化性:是数字地图与模拟地图之间能够相互转化; 可传输性:可借助于当代通讯技术进行远程或近距离传输; 存储与显示分离:存储与其显示是分离的; 地图数据的几何变换有哪些类型,各自有什么特征?缩放(比例)、对称、旋转、平移、投影、错切、二维组合等各种变换。平移变换用于移动坐标系的原点 变换前后的坐标必须满足,。旋转变换指图形的放置围绕原点旋转θ角,且逆时针为正,顺时针为负。平移和旋转变换都保持二维空间上目标变换时的距离及大小不变,但缩放变换会改变坐标系的单位长度(距离)。 顺序存储、随机存储、链式存储的比较链式存储在某些特定操作上具有比顺序存储和随机存储更多的优点。它能很容易地处理因节点的绝对位置改变带来的变化。尽管一个节点在表中的绝对位置改变了,但它的物理存储位置可以保持不变,只是节点的属性值即地址要改变。随机存储也允许节点的存储位置保持不变,但要改变其指向存储位置的指针。在不改变表中任何节点的绝对位置时,顺序存储和随机存储要优于链式存储。在顺序或随机存储中,可以很容易地访问第j 个节点。 DCEL 模型的原理? 1.假设C 的方向从pN 到sN ,则与其相邻的多边形RP 位于右边,LP 位于左边。弧段C 是由围绕点sN 处的下一个逆时针弧段RC 和围绕点pN 的下一个逆时针弧段LC 界定的边界之内。 2.所谓下一弧段表示了在终结点sN 关联的弧段中,该弧段逆时针方向的第一条弧段RC ,而所谓上一弧段则表示了在始结点pN 关联的弧段中,该弧段逆时针方向的第一条弧段LC 。 3.如果沿着多边形RP 顺时针移动,那么弧段RC 紧位于C 后, 4.如果沿着多边形LP 顺时针移动,那么LC 紧位于C 后 路径拓扑模型有哪些,网络拓扑模型有哪些,各自的基本原理?路径拓扑模型有面条模型(面状单元间的边界作为坐标记录下来,没有关于坐标串与单个多边形间关系的相应信息;地理底图的轮廓线可以从这种数据模型中轻易获取)、多边形模型(记录和存储了每个多边形的外轮廓线;很容易标识每个多边形实体,但其存储空间却迅速扩大,因为多边形间的公共边被存储两次)、点位字典模型(该模型是对多边形模型的一个改进,它记录的是各多边形边界上各点的编码ID 并构成循环表,同时以数据字典方式记录下各点的坐标值,利用字典就可通过点的编码找到其相应的坐标)、弧段/点位字典模型(表达了多边形与弧段,以及弧段与点的构成和组成关系;在该模型中,每个多边形由弧段的循环表组成,而每条弧段又由一列点组成)。网络拓扑模型有DIME 模型(1.要找出所有的DIME 段及其左右多边形。2.这些段按以下顺序排列:第一段的止点是后一段的起点,最后一个段的止点是第一个段的起点,这样便形成了一个循环表。在这个过程中,起、止点是可以按需切换的,以使多边形始终位于每个段的右边。)、POLYVRT 模型(将弧段的关系按DIME 段给出,弧段的端点被称为结点而不是点)、结点模型(用结点结构来组织这些关系,根据任何一个结点都具有且仅有三个相邻结点,每个结点都具有且仅有三条相关链和与这三条相关链相关的右多边形(按右手法则确定),在拓扑文件中记录下各结点的三个相邻结点、三条相关链和三个右多边形,以此来实现数据处理时对多边形的操作与检索)、扩展弧段模型(弧段的邻域可加以扩展,从而包含围绕某一结点的下一逆时针弧段的ID 。当沿着某一多边形轮廓顺时针方向前进时,这些弧段将依顺序成为下一条弧段。每一弧段的邻域关系包括了第一和最后一个结点,左、右多边形以及相应的左、右弧段(LC 和RC)。右弧段依顺序是右多边形的下一条弧段,左弧段依顺序是左多边形的下一条弧段)。 4叉树的基本原理?四叉树分割的基本思想是首先把一幅图像或一幅栅格地图等分成四部分,逐块检查其格网值。四个等分区称为四个子象限,按顺序为左上(NW )、右上(NE )、左下(SW )、右下(SE ),可以用树结构表示。如果某个子区的所有格网都含有相同的值,则这个子区就不再往下分割;否则,把这个区域再分割成四个子区,这样递归地分割,直到每个子块都只含有相同的灰度或属性值为止。这就是常规四叉树的建立过程。 数字地图数据采集的方式有哪些?比较各自的优缺点和实用范围?数字遥感数据获取、数字化、野外测量等。数字化具有简便,效率较高,但是精度比野外测量差。 数据测量的尺度有哪4种,各自的特征?定名尺度,顺序尺度,间隔尺度还有比例尺度 什么是地图综合,它与数据压缩、比例尺缩放的差别?空间信息数量庞大,类型复杂,因此,在有限的计算机存贮空间与地图的图面上要反映这些庞大而复杂的空间信息,就不得不反映其主要的、本质性的方面,舍弃次要的、非本质性的方面,以确保地图的易读性,满足空间数据库的多尺度表达和GIS 的多层次规划、管理与分析决策的需要,这个过程就是地图与GIS 综合。数据压缩是指在不丢失信息的前提下,缩减数据量以减少存储空间,提高其传输、存储和处理效率的一种技术方法。或按照一定的算法对数据进行重新组织,减少数据的冗余和存储的空间。比例尺缩放只是指一幅地图的比例尺变大或者缩小,地图的所包含的信息数据并没有变。地图综合与数据压缩都导致信息量的减少,都是为了缩小存储空间和节省计算处理时间而去掉繁杂细节。但数据压缩一般是在无损图解精度的前提下去掉“贡献”小而用插值方法可近似恢复的数据元素,即数据压缩可用数据的插值加密手段进行逆处理,而制图综合不受图解精度约束,被删除或被派生的信息不可逆。 地图综合的过程分为几个阶段?分为三个阶段:综合规则的制定,综合过程的控制,综合结果的评测。 线状要素的综合算法有哪些?各自的基本原理和优缺点?独立算法(它不顾及相邻点之间的几何关系。如选取每第k 点法,去掉其它点。还有随机取点法。很难捕捉到特征点,会引起曲线的变形。这种方法只能用于简单的数据压缩,而不能用于真正的地理信息综合。)、局部处理算法(该方法在对顶点选择时顾及到直接相邻诸顶点的特征。算法所产生的变形比独立点算法小。但比后继方法差。)、约束扩展局部处理算法(在线的某段周围定义一个搜索域,并利用距离、角度或点数来搜索更多的相邻点。)、无约束扩展局部处理算法(利用线的复杂度,坐标点的密度、开始点的定位等来搜索相邻的点。)、全局算法(它考虑到整条线或特定线段的特征)、基于自然法则的化简算法(对于任何特定的地图比例尺,就必然有其上地图目标的一个极小尺寸SVO ,在这个尺寸内,所有的细部信息都会丢失)。 可视化和符号化的概念?可视化:是指在人脑中形成对事物的图像,是一个心理处理过程,促使对事物的观察力及建立概念等。科学计算可视化:是通过研制计算机工具、技术和系统,把实验或数值计算获得的大量抽象数据转换为人的视觉可以直接感受的计算机图形图像,从而可进行数据探索和分析。地学相关的可视化:测绘学家的地形图测绘编制,地理学家、地质学家使用的图解,地图学家专题、综合制图等,都是用图形(地图)来表达对地理世界现象与规律的认识和理解。包括地图可视化、地理信息系统(GIS)可视化及其在专业应用领域的可视化。符号化是指将专题数字信息转化为模拟的制图符号。 数据增强的手段?数据增强(给线、面状要素增加细节以改进显示效果或者为没有数据采样的地方进行估值。近似地看作为数据选取和其它综合操作的逆过程)有线性插值,分段拟合(用一段一段的曲线来代替每条线段,而且只在每条线段的端点处才相交。使用分段多项式函数能产生理想的结果),曲线拟合,空间插值。 多边形晕线填充的原理?多边形的晕线填充算法要求代表某值的晕线与起点对齐。相邻区域如果属性值相同,这两个区域的晕线则完全对齐。方法:通过固定晕线位置,使之同X 轴平行就可以保持这种特性。 首先将坐标轴按晕线的方向角旋转。然后在旋转后的坐标空间中找到多边形的最大Y 坐标 (YMAX)。穿过多边形的晕线中最顶端的那条Y 坐标可以根据下式计算:Y * =INT [YMAX / DELTA ] × DELTA (其中INT 是最大取整函数;DELTA 是晕线间的垂直距离。)取得多边形晕线中的 最高一条的Y 坐标后,其他各晕线的Y 坐标可以通过将Y * 依次递减DELTA 值来得到,这个过程直到该多边形中再没有晕线经过时停止。基本方法有:单线法(首先将多边形先旋转一个方向角,然后依序每次一条晕线地分别处理各线。下一步检查多边形轮廓的每一段,判断其是否与所处理的晕线相交,保存交点并按X 坐标排序。这种排序是为了通过一系列(移动,绘制)对操作来保证恰当地绘出晕线。 最后所有的交点旋转回原始多边形空间显示),绕行法(原理是环绕多边形一周以计算所有晕线与多边形的交点)。 网格法追踪原则和鞍部处理?通过网格追踪等值线方法的优点,在于网格可以按照行列编号隐式地建立起邻域间的位置关系。步骤:1.一条等高线从网格单元(i,j)的四个邻接单元(i-1,j),(i+1,j),(i,j-1),(i,j+1)之一进入,应退出该单元并继续往其余三个网格单元追踪。2.确定当前单元的哪条边作为退出边时,要看该边两端点的z 值范围是否包含了zi 值。 3.等值线在退出边上的准确位置通常使用内插方法确定, 4.该内插是在网格单元的边上进行的。在得到等值线与网格的交点以后可以按顺序直接绘出。“鞍点”现象:一个网格单元内可能会出现多于一条的有相同z 值的等值线段。出现“鞍点”时的追踪:基于四个端点的z 值内插出网格单元的中心点的z 值,然后把单元分成四个三角形(图6-36d)。对于每个三角形来说,由于其只有三边,就不存在难以确定追踪方向的。问题:如果一条等值线从三角形的一边进入的话,只可能从另外两边的一边中出去。网格中心点的z 值为53,所以应该把S1与S2,S3与S4相连 位-平面方法裁剪线段的算法(分区裁剪)?1.窗口把这个平面分成九个区域。2.点的x,y 坐标如果都位于四个角区域中的任一个,那么该点位于窗口外。3.如果点的x 或y 坐标位于四个边区域的任一个,那么这个点也在窗口外。4.除了角区域和边区域,就是剪裁窗口了。5.如果一条线段的端点都位于窗口的内部,那么这条线段就全部显示出来。6.而两端点都位于窗口的同一条边界外,这条线段就要全部剪裁掉。7.只有当端点一个位于窗口外,一个在窗口内,或者两端点都在窗口外但是线段穿过不同的窗口边界时才需要进一步处理。