matlab练习题和答案
MATLAB习题及参考答案经典.doc

习题:1, 计算⎥⎦⎤⎢⎣⎡=572396a 与⎥⎦⎤⎢⎣⎡=864142b 的数组乘积。
2, 对于B AX =,如果⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=753467294A ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=282637B ,求解X 。
3, 已知:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=987654321a ,分别计算a 的数组平方和矩阵平方,并观察其结果。
4, 角度[]604530=x ,求x 的正弦、余弦、正切和余切。
(应用sin,cos,tan.cot)5, 将矩阵⎥⎦⎤⎢⎣⎡=7524a 、⎥⎦⎤⎢⎣⎡=3817b 和⎥⎦⎤⎢⎣⎡=2695c 组合成两个新矩阵: (1)组合成一个4⨯3的矩阵,第一列为按列顺序排列的a 矩阵元素,第二列为按列顺序排列的b 矩阵元素,第三列为按列顺序排列的c 矩阵元素,即 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡237912685574(2)按照a 、b 、c 的列顺序组合成一个行矢量,即 []2965318772546, 将(x -6)(x -3)(x -8)展开为系数多项式的形式。
(应用poly,polyvalm)7, 求解多项式x 3-7x 2+2x +40的根。
(应用roots)8, 求解在x =8时多项式(x -1)(x -2) (x -3)(x -4)的值。
(应用poly,polyvalm)9, 计算多项式9514124234++--x x x x 的微分和积分。
(应用polyder,polyint ,poly2sym)10, 解方程组⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡66136221143092x 。
(应用x=a\b)11, 求欠定方程组⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡5865394742x 的最小范数解。
(应用pinv) 12, 矩阵⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=943457624a ,计算a 的行列式和逆矩阵。
(应用det,inv)13, y =sin(x ),x 从0到2π,∆x =0.02π,求y 的最大值、最小值、均值和标准差。
matlab复习题标准答案
matlab复习题标准答案# MATLAB复习题标准答案一、选择题1. MATLAB中的矩阵默认是按什么顺序存储的?- A. 行主序- B. 列主序- C. 随机序- D. 行主序2. 下列哪个函数用于计算矩阵的行列式?- A. `det`- B. `diag`- C. `trace`- A. `det`3. MATLAB中如何创建一个5x5的单位矩阵?- A. `eye(5,5)`- B. `zeros(5,5)`- C. `ones(5,5)`- A. `eye(5,5)`4. 下列哪个命令用于生成0到1之间的随机数?- A. `rand()`- B. `randi()`- C. `randn()`- A. `rand()`5. MATLAB中如何计算向量的范数?- A. `norm(vector)`- B. `abs(vector)`- C. `sum(vector)`- A. `norm(vector)`二、填空题1. MATLAB中的`%`符号用于______。
- 答案:注释2. 要创建一个从10到1的递减向量,可以使用______。
- 答案:`1:-1:10`3. MATLAB中,`zeros(3,4)`会生成一个______。
- 答案:3行4列的全零矩阵4. 函数`max(A)`会返回矩阵A中的______。
- 答案:最大值5. `plot(x,y)`函数在MATLAB中用于______。
- 答案:绘制x和y的数据点的图形三、简答题1. 请简述MATLAB中矩阵的基本操作有哪些?- 答案:矩阵的基本操作包括矩阵的创建、转置、求逆、矩阵乘法、矩阵加法、矩阵减法等。
2. MATLAB中如何实现循环结构?- 答案:MATLAB中实现循环结构主要有两种方式,一种是使用`for`循环,另一种是使用`while`循环。
3. 请解释MATLAB中的函数文件和脚本文件的区别。
- 答案:函数文件通常包含返回值和参数,可以被其他脚本或函数调用;而脚本文件主要用于执行一系列命令,不包含返回值。
matlab考试题目及答案
matlab考试题目及答案1. 题目:编写一个MATLAB函数,实现计算并返回一个向量中所有元素的平方和。
答案:以下是一个简单的MATLAB函数,用于计算并返回一个向量中所有元素的平方和。
```matlabfunction sumOfSquares = calculateSumOfSquares(vector)sumOfSquares = sum(vector.^2);end```2. 题目:给定一个3x3的矩阵A,使用MATLAB编写代码,求出矩阵A 的转置。
答案:可以通过简单的转置操作来求得矩阵A的转置。
```matlabA = [1 2 3; 4 5 6; 7 8 9];A_transpose = A';```3. 题目:编写一个MATLAB脚本,实现对一个二维数组进行排序,并返回排序后的数组。
答案:以下是一个MATLAB脚本,用于对一个二维数组进行排序,并返回排序后的数组。
```matlabfunction sortedArray = sort2DArray(array)sortedArray = sort(array(:));end```4. 题目:给定一个向量x,使用MATLAB编写代码,计算并返回向量x的元素个数。
答案:可以通过内置函数`numel`来计算向量x的元素个数。
```matlabx = [1, 2, 3, 4, 5];numElements = numel(x);```5. 题目:编写一个MATLAB函数,实现计算并返回两个向量元素的点积。
答案:以下是一个简单的MATLAB函数,用于计算两个向量的点积。
```matlabfunction dotProduct = calculateDotProduct(vector1, vector2)dotProduct = dot(vector1, vector2);end```6. 题目:给定一个矩阵B,使用MATLAB编写代码,求出矩阵B的行列式。
matlab试题及答案

matlab试题及答案# MATLAB试题及答案一、选择题1. MATLAB的基本数据单位是:A. 矩阵B. 向量C. 标量D. 数组答案:A2. 下列哪个命令可以用来绘制函数图形?A. `plot`B. `graph`C. `draw`D. `chart`答案:A3. MATLAB中,以下哪个是正确的矩阵转置操作?A. `transpose(A)`B. `A'`C. `A^T`D. `flip(A)`答案:B二、简答题1. 简述MATLAB中矩阵的基本操作。
答案:在MATLAB中,矩阵是最基本的数据结构,可以进行加、减、乘、除等基本运算。
矩阵的创建可以使用方括号`[]`,例如`A = [1 2;3 4]`。
矩阵的转置使用单引号`'`,例如`A'`。
矩阵的求逆使用`inv`函数,例如`inv(A)`。
2. MATLAB中如何实现循环结构?答案:MATLAB中实现循环结构主要有两种方式:`for`循环和`while`循环。
`for`循环用于已知迭代次数的情况,例如:```matlabfor i = 1:5disp(i);end````while`循环用于迭代次数未知的情况,例如:```matlabi = 1;while i <= 5disp(i);i = i + 1;end```三、计算题1. 给定矩阵A和B,请计算它们的乘积C,并求C的行列式。
A = [1 2; 3 4]B = [5 6; 7 8]答案:首先计算矩阵乘积C:```matlabC = A * B;```然后计算C的行列式:```matlabdetC = det(C);```结果为:```matlabC = [19 22; 43 50]detC = -16```2. 编写一个MATLAB函数,计算并返回一个向量的范数。
答案:```matlabfunction norm_value = vector_norm(v)norm_value = norm(v);end```四、编程题1. 编写一个MATLAB脚本,实现以下功能:- 随机生成一个3x3的矩阵。
matlab20道试题及解答
试题1.“数学黑洞”:任意一个4位自然数,将组成该数的各位数字重新排列,形成一个最大数和一个最小数,之后两数相减,其差仍为一个自然数。
重复进行上述运算,最终会出现一个神秘的数,请编程输出这个神秘的数。
clear;a=input('请输入一个四位正整数:');str_a=num2str(a); %将a转化为一个字符串b_min=str2double(sort(str_a)); %形成最小数b_max=str2double(sort(str_a,'descend')); %形成最大数b=b_max-b_min; %求最大数与最小数之差while (b~=a)a=b;str_a=num2str(a); %将a转化为一个字符串b_min=str2double(sort(str_a)); %形成最小数b_max=str2double(sort(str_a,'descend')); %形成最大数b=b_max-b_min; %求最大数与最小数之差endb试题2.将数字1、2、3、4、5、6填入一个2行3列的表格中,要使得每一列右边的数字比左边的数字大,每一行下面的数字比上面的数字大。
请编写程序求出按此要求可有几种填写方法。
a(1)=1;a(6)=6;count=0; %用来计数b=perms('2345'); %产生2345的全排列[m,n]=size(b);for i=1:mtemp=b(i,:);a(2)=str2double(temp(1));a(3)=str2double(temp(2));a(4)=str2double(temp(3));a(5)=str2double(temp(4));if ((a(4)>a(2))&&(a(4)>a(3))&&(a(5)>a(3)))count=count+1;c=reshape(a,2,3); %将a向量转化为2*3矩阵输出disp(c);endenddisp(['共有',num2str(count),'种填写方法']); %输出填写方法的种数试题3.编写成绩排序程序。
matlab开卷考试题及答案

matlab开卷考试题及答案MATLAB开卷考试题及答案一、选择题(每题2分,共20分)1. MATLAB中用于创建一个3x3的单位矩阵的命令是:A. `eye(3)`B. `ones(3)`C. `zeros(3)`D. `identity(3)`答案:A2. 下列哪个函数用于计算矩阵的逆?A. `inv()`B. `det()`C. `eig()`D. `trace()`答案:A3. MATLAB中,用于绘制二维图形的函数是:A. `plot()`B. `surf()`C. `mesh()`D. `bar()`答案:A4. 如何在MATLAB中计算向量的范数?A. `norm()`B. `abs()`C. `length()`D. `size()`答案:A5. MATLAB中,用于创建一个随机数矩阵的函数是:A. `rand()`B. `randi()`C. `randn()`D. `randperm()`答案:A6. 下列哪个命令用于在MATLAB中求解线性方程组?A. `solve()`B. `fsolve()`C. `fzero()`D. `linsolve()`答案:A7. MATLAB中,用于计算矩阵的行列式的函数是:A. `det()`B. `trace()`C. `eig()`D. `inv()`答案:A8. 如何在MATLAB中创建一个全1的3x3矩阵?A. `ones(3,3)`B. `eye(3,3)`C. `zeros(3,3)`D. `rand(3,3)`答案:A9. MATLAB中,用于计算矩阵的特征值的函数是:A. `eig()`B. `eigs()`C. `svd()`D. `qr()`答案:A10. 下列哪个函数用于计算矩阵的奇异值分解?A. `eig()`B. `svd()`C. `qr()`D. `lu()`答案:B二、填空题(每题3分,共30分)1. MATLAB中,用于创建一个3x3的零矩阵的命令是 `____`。
(完整版)matlab基础练习题(带答案)
Matlab 基础练习题常量、变量、表达式1、 MATLAB 中,下面哪些变量名是合法的?( )(A )_num (B )num_ (C )num- (D )-num 2、 在MA TLAB 中,要给出一个复数z 的模,应该使用( )函数。
(A )mod(z) (B )abs(z) (C )double(z) (D )angle(z) 3、 下面属于MATLAB 的预定义特殊变量的是?( )(A )eps (B )none (C )zero (D )exp4、 判断:在MA TLAB 的内存工作区中,存放一个英文字符 'a' 需要占用1个字节,存放一个中文字符‘啊’需要占用2个字节。
( 错,都是2个字节 )5、 判断:MA TLAB 中,i 和j ( 对 )6、 判断:MA TLAB 中,pi 代表圆周率,它等于3.14。
( 错,后面还有很多位小数 )7、 在MA TLAB 中,若想计算的51)3.0sin(21+=πy 值,那么应该在MA TLAB 的指令窗中输入的MA TLAB 指令是__y1=2*sin(0.3*pi)/(1+sqrt(5))_。
8、 在MA TLAB 中,a = 1,b = i ,则a 占_8__个字节,b 占_16_个字节,c 占________字节。
9、 在MA TLAB 中,inf 的含义是__无穷大__,nan 的含义是__非数(结果不定)___。
数组1、 在MA TLAB 中,X 是一个一维数值数组,现在要把数组X 中的所有元素按原来次序的逆序排列输出,应该使用下面的( )指令。
(A )X[end:1] (B )X[end:-1:1] (C )X (end:-1:1) (D )X(end:1) 2、 在MA TLAB 中,A 是一个字二维数组,要获取A 的行数和列数,应该使用的MATLAB的命令是( )。
(A )class(A) (B )sizeof(A) (C )size(A) (D )isa(A)3、 在MATLAB 中,用指令x=1:9生成数组x 。
matlab简单编程21个题目及答案
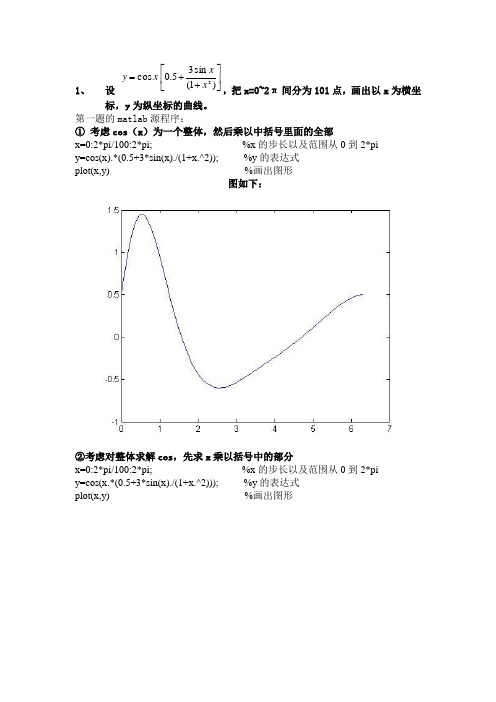
1、设⎥⎦⎤⎢⎣⎡++=)1(sin35.0cos2xxxy,把x=0~2π间分为101点,画出以x为横坐标,y为纵坐标的曲线。
第一题的matlab源程序:①考虑cos(x)为一个整体,然后乘以中括号里面的全部x=0:2*pi/100:2*pi; %x的步长以及范围从0到2*pi y=cos(x).*(0.5+3*sin(x)./(1+x.^2)); %y的表达式plot(x,y)%画出图形图如下:②考虑对整体求解cos,先求x乘以括号中的部分x=0:2*pi/100:2*pi; %x的步长以及范围从0到2*pi y=cos(x.*(0.5+3*sin(x)./(1+x.^2))); %y的表达式plot(x,y) %画出图形图如下:2、产生8×6阶的正态分布随机数矩阵R1, 求其各列的平均值和均方差。
并求该矩阵全体数的平均值和均方差。
第二题的matlab源程序如下:R1=randn(8,6) %产生正态分布随机矩阵R1 =1.0933 -0.7697 1.5442 -0.1924 1.4193 0.21571.1093 0.3714 0.0859 0.8886 0.2916 -1.1658-0.8637 -0.2256 -1.4916 -0.7648 0.1978 -1.14800.0774 1.1174 -0.7423 -1.4023 1.5877 0.1049-1.2141 -1.0891 -1.0616 -1.4224 -0.8045 0.7223-1.1135 0.0326 2.3505 0.4882 0.6966 2.5855-0.0068 0.5525 -0.6156 -0.1774 0.8351 -0.66691.5326 1.1006 0.7481 -0.1961 -0.2437 0.1873aver=(sum(R1(1:end,1:end)))./8 %产生各行的平均值aver =0.0768 0.1363 0.1022 -0.3473 0.4975 0.1044a=std(R1(1:end,1:end)) %产生各行的均方差也就是标准差a =1.0819 0.8093 1.3456 0.8233 0.8079 1.2150aver1=(sum(R1(:)))./48 %全体数的平均值aver1 =0.0950b=std(R1(:)) %全体数的均方差即标准差b =1.01033、设x=rcost+3t,y=rsint+3,分别令r=2,3,4,画出参数t=0~10区间生成的x~y 曲线。
matlab试题及答案开卷

matlab试题及答案开卷1. MATLAB基础操作在MATLAB中,如何创建一个名为“myMatrix”的3x3矩阵,其元素从1到9按顺序排列?答案:在MATLAB中,可以使用以下命令创建名为“myMatrix”的3x3矩阵:```matlabmyMatrix = [1 2 3; 4 5 6; 7 8 9];```或者使用内置函数`magic`:```matlabmyMatrix = magic(3);```2. 矩阵运算给定两个矩阵A和B,其中A = [2 3; 4 5],B = [6 7; 8 9],计算A+B的结果。
答案:在MATLAB中,可以使用加号`+`来计算两个矩阵的和:```matlabA = [2 3; 4 5];B = [6 7; 8 9];C = A + B;```计算结果C为:```matlabC = [8 10; 12 14];```3. 向量操作创建一个从0到1的等差数列,步长为0.1。
答案:在MATLAB中,可以使用`linspace`函数或`:`操作符来创建等差数列:```matlabv = 0:0.1:1;```或者使用`linspace`函数:```matlabv = linspace(0, 1, 11);```两种方法都将得到一个包含11个元素的向量,从0开始,到1结束,步长为0.1。
4. 条件语句编写一个MATLAB脚本,判断一个给定的数n是否为素数。
答案:可以通过以下MATLAB脚本来判断一个数n是否为素数:```matlabfunction isPrime = isPrimeNumber(n)if n <= 1isPrime = false;elsefor i = 2:sqrt(n)if mod(n, i) == 0isPrime = false;return;endendisPrime = true;endend```调用此函数时,传入一个数值n,函数将返回一个布尔值,表示n 是否为素数。
matlab试题及答案

matlab试题及答案一、单项选择题(每题2分,共10分)1. MATLAB中用于创建向量的命令是:A. vectorB. arrayC. linspaceD. colon答案:D2. 在MATLAB中,以下哪个函数用于计算矩阵的行列式?A. detB. rankC. invD. eig答案:A3. MATLAB中用于进行矩阵转置的运算符是:A. 'B. .C. ^D. !答案:A4. 若A是一个3x3的矩阵,执行命令A(2,:)=0;后,矩阵A的第二行将变为:A. [0 0 0]B. [1 0 0]C. [0 1 0]D. [0 0 1]答案:A5. MATLAB中,以下哪个函数用于绘制三维曲面图?A. plotB. surfC. barD. hist答案:B二、填空题(每题3分,共15分)1. MATLAB中,使用________命令可以清除所有变量。
答案:clear2. 若要在MATLAB中创建一个从0到1的100个元素的向量,可以使用命令________。
答案:linspace(0,1,100)3. MATLAB中,使用________函数可以计算矩阵的特征值。
答案:eig4. 在MATLAB中,________函数用于计算两个矩阵的点乘。
答案:dot5. 若要在MATLAB中绘制一个圆,可以使用________函数。
答案:plot三、简答题(每题5分,共20分)1. 请解释MATLAB中矩阵索引的概念。
答案:在MATLAB中,矩阵索引指的是通过行号和列号来访问矩阵中特定元素的过程。
例如,A(2,3)表示访问矩阵A的第二行第三列的元素。
2. MATLAB中如何实现矩阵的元素乘法?答案:在MATLAB中,矩阵的元素乘法可以通过使用点乘运算符(.*)来实现。
例如,C = A .* B,其中A和B是相同大小的矩阵。
3. 请说明MATLAB中如何使用循环结构。
答案:MATLAB中可以使用for循环和while循环两种循环结构。
matlab试题与答案
例8 绘制三维曲面图z=sin(x+sin(y))-x/10。 程序如下: [x,y]=meshgrid(0:0.25:4*pi); z=sin(x+sin(y))-x/10; mesh(x,y,z); axis([0 4*pi 0 4*pi -2.5 1]);
1.编程实现当α∈[-π,π],间隔为1°时求解 正弦和余弦的值。 2.利用rand函数产生(0,1)间均匀分布的 10×10随机矩阵A,然后统计A中大于等于 0.6的元素个数。 3.利用randn函数产生均值为0,方差为1的 10×10正态分布随机阵A,然后统计A中大 于-0.5且小于0.5的元素个数。
调用tran.m的命令文件main1.m: x=input('Please input x=:'); y=input('Please input y=:'); [rho,the]=tran(x,y); rho the
例1 在0≤x≤2p区间内,绘制曲线 y=2e-0.5xcos(4πx) 程序如下: x=0:pi/100:2*pi; y=2*exp(-0.5*x).*cos(4*pi*x); plot(x,y),grid on;
4.编程实现下表功能
b a A<1 a≥1 b≤0.5 语句 1 语句 3 B>0.5 语句 2 语句 4
5.有一矩阵A,找出矩阵中其值大于1的元素,并 将它们重新排列成列向量B。 6.在一测量矩阵A(100×3)中,存在有奇异值(假设 大于100的值认为是奇异值),编程实现删去奇异 值所在的行。 7.在给定的100×100矩阵中,删去整行内容全为0 的行,删去整列内容全为0的列。
0 0 8 a 0 7 5 2 3 0
MATLAB平时练习题(附答案)
一、填空题1、MATLAB常用操作界面包括、工作空间窗口、、、内存数组编辑器、M文件编辑/调试器、帮助导航/浏览器、图形窗口等。
2、MATLAB中Inf或inf表示、NaN或nan表示、nargout表示。
3、MATLAB中逗号主要用作;用作输入量与输入量之间的分隔符;。
4、工作空间浏览器主要用于内存变量的、和。
5、MATLAB实现将全下标转换为单下标的指令为、据单下标换算出全下标的指令为。
6、二维数组的标识有、、“逻辑1”标识。
二、简述下列命令在MATLAB中的作用1.clf %清除图对象clear %清除工作空间内的所有变量clc %清除当前屏幕上显示的所有内容,但不清除工作空间中的数据2.ceil %沿+∞方向取整factor %符号计算的因式分解3.sph2cart %球坐标变为直角坐标pow2 %2的幂4.digits(d) %设置当前的可变算术精度的位数为整数 d 位vpa(pi,100) %设置当前pi的小数位数为1005.box on %打开框状坐标轴开grid off %网格关6.logspace %对数分度向量cat %串接成高维数组7.sym2poly %符号多项式转变为双精度多项式系数向量poly2sym %双精度多项式系数转变为向量符号多项式8.plot3 %三维线图poly2str %以习惯方式显示多项式9.bar %二维直方图pie %二维饼图10.zoom on %打开图形缩放模式 edit %M文件编辑11.whos %对当前工作空间变量的信息进行列表figure %生成图形窗口12.cart2sph %直角坐标变为球坐标pol2cart % 极或柱坐标变为直角坐标13.diff %数值差分、符号微分14.ezplot3 %画三维曲线的简捷指令fix %向零取整factor %符号计算的因式分解三简答题1.叙述MATLAB的主要窗口包括哪些?其作用是什么?命令窗口(Commend Window)——供输入命令,实现计算或绘图功能。
Matlab考试题库及答案(教师出卷参考专用)

Matlab考试题库及答案(教师出卷参考专用)一、选择题1.以下哪个函数用于在Matlab中创建一个图形窗口?A. figureB. plotC. graphD. window答案:A2.在Matlab中,以下哪个选项可以用来定义一个矩阵?A. A = [1 2 3; 4 5 6]B. A = (1, 2, 3, 4, 5, 6)C. A = {1, 2, 3, 4, 5, 6}D. A = 1 2 3; 4 5 6答案:A3.以下哪个函数用于求解线性方程组Ax=b?A. solveB. linsolveC. solve(A, b)D. linsolve(A, b)答案:D4.在Matlab中,如何计算矩阵A和矩阵B的乘积?A. A BB. A \ BC. A . BD. A .\ B答案:A5.以下哪个函数用于在Matlab中绘制三维散点图?A. scatterB. scatter3C. plot3D. bar3答案:B二、填空题1.在Matlab中,要创建一个名为"myfig"的图形窗口,可以使用______函数。
答案:figure('Name', 'myfig')2.在Matlab中,要计算矩阵A的行列式,可以使用______函数。
答案:det(A)3.在Matlab中,若要计算变量x的平方,可以使用______运算符。
答案:.^24.在Matlab中,若要计算矩阵A的逆矩阵,可以使用______函数。
答案:inv(A)5.在Matlab中,要绘制一个正弦波形,可以使用______函数。
答案:plot(sin(x))三、判断题1.在Matlab中,矩阵的索引从1开始计数。
()答案:正确2.在Matlab中,可以使用逻辑运算符"&&"和"||"。
()答案:错误3.在Matlab中,矩阵乘法满足交换律。
MatLab考试题题库(必做题)(带答案)
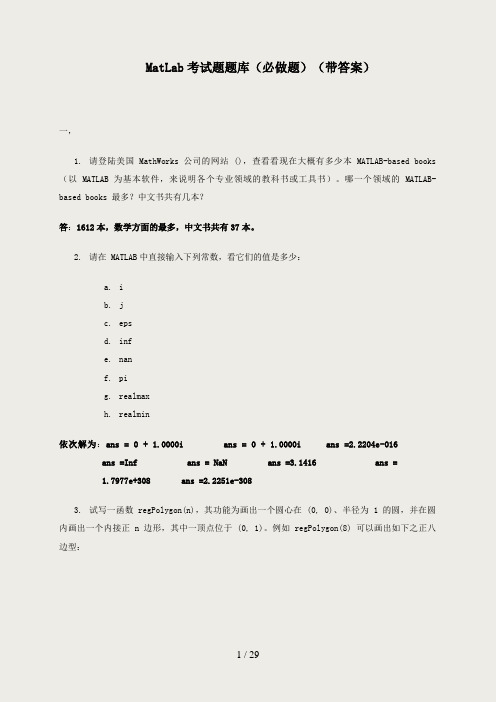
MatLab考试题题库(必做题)(带答案)一,1.请登陆美国 MathWorks 公司的网站 (),查看看现在大概有多少本 MATLAB-based books (以 MATLAB 为基本软件,来说明各个专业领域的教科书或工具书)。
哪一个领域的 MATLAB-based books 最多?中文书共有几本?答:1612本,数学方面的最多,中文书共有37本。
2.请在 MATLAB中直接输入下列常数,看它们的值是多少:a.ib.jc.epsd.infe.nanf.pig.realmaxh.realmin依次解为:ans = 0 + 1.0000i ans = 0 + 1.0000i ans =2.2204e-016 ans =Inf ans = NaN ans =3.1416 ans =1.7977e+308 ans =2.2251e-3083.试写一函数 regPolygon(n),其功能为画出一个圆心在 (0, 0)、半径为 1 的圆,并在圆内画出一个内接正 n 边形,其中一顶点位于 (0, 1)。
例如 regPolygon(8) 可以画出如下之正八边型:解:新建regPolygon.m文件如下:function y=regPolyfon(n)n=8;%要画的n边形R=1; %圆的半径t=0:0.01:2*pi;x=R*cos(t);y=R*sin(t);m=linspace(pi/2,5/2*pi,n+1);xz=R*cos(m);yz=R*sin(m);hold onplot(x,y,xz,yz);axis 'equal';4.一条参数式的曲线可由下列方程式表示:x = sin(t), y = 1 - cos(t) + t/10当 t 由 0 变化到 4*pi 时,请写一个 MATLAB 的脚本 plotParam.m,画出此曲线在 XY 平面的轨迹。
解:新建plotParam.m :t = linspace(0, 4*pi);x = sin(t);y = 1-cos(t)+t/10;plot(x, y, '-o'); -1-0.8-0.6-0.4-0.200.20.40.60.8100.511.522.535. 当一个小圆轮沿着一条曲线行进时,轮缘任一点的轨迹就会产生变化丰富的摆线。
MATLAB习题及答案
填空题1. MATLAB于1984年由美国Mathworks公司推出,其后每年更新(两次。
2. MATLAB是一种以(矩阵)运算为基础的交互式程序设计语言。
3. MATLAB具有卓越的数值计算能力和符号计算、文字处理、可视化建模仿真和实时控制等众多功能,其每个变量代表一个(矩阵),每个元素都看作(复数)。
4.通过命令(help)、(lookfor),可以查找所有命令或函数的使用方法。
5.执行语句a=1:2:10,得到的一维数组是(1 3 5 7 9).6.执行语句b=linspace(1,10,10)后,一维数组b包含(10)个元素,最大值是10)7.函数rem()的功能是取(余)数。
8.若p=[1 0 0;1 1 0],则p|〜p=([1 1 1;1 1 1]).(注:填空时请用本题的p的方式表示结果)9.若p=[1 0 0;1 1 0],则all(p)=([1 0 0]).10.矩阵的加减运算,要求相加减的矩阵阶数相同。
若A=[1 2 3 4;2 3 1 8],则执行语句:[n,m]=size(A),则n=(2 ),m=(4 ).11.对于一维矩阵,求其长度的函数是(length()).12.数组和数组之间的运算,尤其是对于乘除运算和乘方运算,如果采用点方式进行计算,表明是数组的(元素)之间的运算关系。
13.求矩阵运算A*B时,要求在维度上,A的(列)数与B的(行)数相等。
二、判断题1.MATLAB只有一种数据类型,一种标准的输入输出语句,不需编译,可直接运行。
(对2.MATLAB的特殊常量是一些预选定义好的数值变量。
(对3.MATLAB变量名不区分大小写。
(错4.i是特殊常量。
(对5.NAN是非数。
(对6.MATLAB中所有的变量都表示一个矩阵或一个向量。
(对7.MATLAB中变量不需要先定义后使用,会自动根据实际赋值的类型对变量类型进行定义。
(对8.clc命令可以从内存中删除一个、多个和所有变量。
MATLAB考试试题及答案

MATLAB考试试题及答案一、选择题(每题5分,共25分)1. 在MATLAB中,下列哪个命令用于创建一个行向量?A. v = [1; 2; 3]B. v = [1 2 3]C. v = [1, 2, 3]D. v = (1, 2, 3)答案:B2. 在MATLAB中,下列哪个命令用于计算矩阵A的行列式?A. det(A)B. det(A')C. det(inv(A))D. det(A^2)答案:A3. 在MATLAB中,下列哪个命令用于计算矩阵A的逆?A. inv(A)B. A^(-1)C. pinv(A)D. A\B答案:A4. 在MATLAB中,下列哪个命令用于求解线性方程组Ax= b?A. A\bB. A/BC. B/AD. A^-1b答案:A5. 在MATLAB中,下列哪个命令用于绘制二维图形?A. plot(x, y)B. scatter(x, y)C. bar(x, y)D. pie(x, y)答案:A二、填空题(每题5分,共25分)6. 在MATLAB中,可以使用______命令创建一个等差数列。
答案:linspace7. 在MATLAB中,可以使用______命令创建一个等比数列。
答案:logspace8. 在MATLAB中,可以使用______命令计算矩阵A的特征值。
答案:eig(A)9. 在MATLAB中,可以使用______命令计算矩阵A的特征向量。
答案:eigenvector(A)10. 在MATLAB中,可以使用______命令计算矩阵A的奇异值。
答案:svd(A)三、解答题(每题25分,共75分)11. 编写MATLAB程序,求解以下线性方程组:2x + 3y - z = 1x - y + 2z = 03x + 2y - 4z = -3答案:```A = [2 3 -1; 1 -1 2; 3 2 -4];b = [1; 0; -3];x = A\b;disp('解为:');disp(x);```12. 编写MATLAB程序,绘制以下函数的图形:y = sin(x) + cos(x),x ∈ [0, 2π]答案:```x = linspace(0, 2pi, 100);y = sin(x) + cos(x);plot(x, y);title('y = sin(x) + cos(x)');xlabel('x');ylabel('y');grid on;```13. 编写MATLAB程序,计算以下矩阵的特征值和特征向量:A = [1 2 3; 4 5 6; 7 8 9]答案:```A = [1 2 3; 4 5 6; 7 8 9];[V, D] = eig(A);disp('特征值:');disp(diag(D));disp('特征向量:');disp(V);```14. 编写MATLAB程序,使用牛顿迭代法求解方程f(x) = x^3 - 4x + 2 = 0在x = 1附近的根。
matlab考试题B卷及答案

matlab考试题B卷及答案1. MATLAB基础操作题:请在MATLAB中创建一个名为`myVector`的向量,包含元素1, 2, 3, 4, 5,并计算其元素之和。
答案:首先,创建向量`myVector`可以使用以下代码:```matlabmyVector = [1 2 3 4 5];```然后,计算元素之和可以使用`sum`函数:```matlabsumOfElements = sum(myVector);```最终,`sumOfElements`的值将为15。
2. MATLAB矩阵运算题:给定一个3x3的矩阵A,其元素为A=[1 2 3;4 5 6; 7 8 9],请计算矩阵A的转置。
答案:计算矩阵A的转置可以使用`transpose`函数或者简单的`.'`操作符。
以下是使用`transpose`函数的代码:```matlabA = [1 2 3; 4 5 6; 7 8 9];A_transpose = transpose(A);```或者使用`.'`操作符:```matlabA_transpose = A.';```得到的转置矩阵`A_transpose`将是:```1 4 72 5 83 6 9```3. MATLAB编程题:编写一个MATLAB函数,该函数接受一个整数n作为输入,并返回一个n阶的魔方矩阵。
答案:魔方矩阵是一个方阵,其中每一行、每一列以及两条对角线上的元素之和都相等。
以下是一个生成n阶魔方矩阵的MATLAB函数:```matlabfunction magicMatrix = createMagicSquare(n)if mod(n, 2) == 0error('n must be an odd number.');endmagicMatrix = zeros(n);num = 1;for i = 1:nfor j = 1:nif i == 1j = j;elsej = (j + 2 * (i - 1) - n) % n + 1;endmagicMatrix(i, j) = num;num = num + 1;endendend```调用此函数并传入一个奇数n,例如`createMagicSquare(3)`,将返回一个3阶魔方矩阵。
Matlab考试题库+答案(教师出卷参考专用)
Matlab考试题库+答案(教师出卷参考专用)[1 2;3 4][1 0;0 4]21. A=[1 2 3;6 5 4]; reshape(A,3,2)=______________.[1 5;6 3;2 4]22. A=[1,2;3,1]; B=[1,0;0,1]; A~=B=___________.[0 1;1 0]23. A=[1,2,3;1,4,9;1,7,27]; triu(A,-1)=_ ____.提取矩阵上三角矩阵的函数[1 2 3;1 4 9;0 7 27] 24. A=[4,15,-45,10,6;56,0,17,-45,0]; find(A>=10 & A<=20)=___ __________.3 6 725.已知A=[0 9 6;1 3 0];B=[1 4 3;1 5 0];写出下列各指令运行的结果。
A &B 的运行结果_______;A ./B 的运行结果_______。
ans=[0 1 1;1 1 0]ans= [0 2.25 2;1 0.6 NaN]26. 产生4阶全0方阵的命令为_______;产生3阶全1方阵的命令为。
zeros(4)ones(3)27. A=rand(2,5);b=size(A);c=length(A);则b和c的值分别为_______ 。
2 5和 528. 用if判断语句判断80≥ x >60,在MATLAB中if语言后的判断应写为_______。
if x<=80 & x>6029.为了使两个pl ot的图形在同一个坐标显示,可以使用_______命令进行图形保持;可以使用_______命令为图形添加网格。
hold ongrid on30. MATLAB的工作空间中有三个变量v1, v2, v3,写出把它们保存到文件my_data.mat中的指令_______;save my_date31. MATLAB提供了两种运行方式,是按_______和把_______文件copy到matlab里,回车。
matlab基础考试题及答案
matlab基础考试题及答案1. MATLAB中,如何创建一个名为"myMatrix"的3x3矩阵,其元素为1到9的连续整数?答案:可以使用以下命令创建矩阵:```matlabmyMatrix = [1 2 3; 4 5 6; 7 8 9];```或者使用`magic`函数:```matlabmyMatrix = magic(3);```2. 在MATLAB中,如何计算一个向量的元素平方?答案:可以使用`.^`运算符来计算向量元素的平方:```matlabv = [1 2 3 4];v_squared = v.^2;```3. MATLAB中,如何将一个向量逆序?答案:可以使用`flip`函数或者`end`索引来逆序一个向量:```matlabv = [1 2 3 4];v_reversed = flip(v);```或者```matlabv_reversed = v(end:-1:1);```4. 在MATLAB中,如何计算矩阵的行列式?答案:可以使用`det`函数来计算矩阵的行列式:```matlabA = [1 2; 3 4];detA = det(A);```5. MATLAB中,如何使用循环结构来计算1到100的自然数之和?答案:可以使用`for`循环来计算总和:```matlabsum = 0;for i = 1:100sum = sum + i;end```或者使用`sum`函数直接计算:```matlabsum = sum(1:100);```6. 在MATLAB中,如何创建一个复数?答案:可以通过指定实部和虚部来创建一个复数:```matlabcomplexNumber = 3 + 4i;```7. MATLAB中,如何绘制一个正弦波?答案:可以使用`plot`函数和`sin`函数来绘制正弦波:```matlabx = linspace(0, 2*pi, 100);y = sin(x);plot(x, y);```8. 如何在MATLAB中计算两个矩阵的点积?答案:可以使用`dot`函数或`*`运算符来计算两个矩阵的点积:```matlabA = [1 2; 3 4];B = [5 6; 7 8];dotProduct = dot(A, B);```或者```matlabdotProduct = A * B;```9. MATLAB中,如何使用条件语句来检查一个数是否为偶数?答案:可以使用`if`语句和模运算符来检查一个数是否为偶数:```matlabnum = 10;if mod(num, 2) == 0disp('The number is even.');elsedisp('The number is odd.');end```10. 在MATLAB中,如何将一个字符串转换为小写?答案:可以使用`lower`函数来将字符串转换为小写:```matlabstr = 'Hello World';lowerStr = lower(str);```结束语:以上是MATLAB基础考试题及答案,希望这些题目能帮助你更好地理解和掌握MATLAB的基础知识。
MATLAB习题及答案
MATLAB习题及答案第1章MATLAB概论1.1与其他计算机语言相比较,MA TLAB语言突出的特点是什么?MATLAB具有功能强大、使用方便、输入简捷、库函数丰富、开放性强等特点。
1.2 MA TLAB系统由那些部分组成?MATLAB系统主要由开发环境、MA TLAB数学函数库、MATLAB 语言、图形功能和应用程序接口五个部分组成。
1.3 安装MATLAB时,在选择组件窗口中哪些部分必须勾选,没有勾选的部分以后如何补安装?在安装MA TLAB时,安装内容由选择组件窗口中个复选框是否被勾选来决定,可以根据自己的需要选择安装内容,但基本平台(即MATLAB选项)必须安装。
第一次安装没有选择的内容在补安装时只需按照安装的过程进行,只是在选择组件时只勾选要补装的组件或工具箱即可。
1.4 MA TLAB操作桌面有几个窗口?如何使某个窗口脱离桌面成为独立窗口?又如何将脱离出去的窗口重新放置到桌面上?在MA TLAB操作桌面上有五个窗口,在每个窗口的右上角有两个小按钮,一个是关闭窗口的Close按钮,一个是可以使窗口成为独立窗口的Undock按钮,点击Undock按钮就可以使该窗口脱离桌面成为独立窗口,在独立窗口的view菜单中选择Dock ……菜单项就可以将独立的窗口重新防止的桌面上。
1.5 如何启动M文件编辑/调试器?在操作桌面上选择?建立新文件?或?打开文件?操作时,M文件编辑/调试器将被启动。
在命令窗口中键入edit命令时也可以启动M文件编辑/调试器。
1.6 存储在工作空间中的数组能编辑吗?如何操作?存储在工作空间的数组可以通过数组编辑器进行编辑:在工作空间浏览器中双击要编辑的数组名打开数组编辑器,再选中要修改的数据单元,输入修改内容即可。
1.7 命令历史窗口除了可以观察前面键入的命令外,还有什么用途?命令历史窗口除了用于查询以前键入的命令外,还可以直接执行命令历史窗口中选定的内容、将选定的内容拷贝到剪贴板中、将选定内容直接拷贝到M文件中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
matlab练习题和答案控制系统仿真实验Matlab部分实验结果目录实验一 MATLAB基本操作 ..................................................................... ....................... 1 实验二 Matlab编程 ..................................................................... ............................... 5 实验三 Matlab底层图形控制 ..................................................................... ..................... 6 实验四控制系统古典分析...................................................................... .......................12 实验五控制系统现代分析 ..................................................................... . (15)实验六 PID控制器的设计 ..................................................................... ......................19 实验七系统状态空间设计...................................................................... .......................23 实验九直流双闭环调速系统仿真 ..................................................................... . (25)实验一 MATLAB基本操作1 用MATLAB可以识别的格式输入下面两个矩阵1233,,1443678,i,,,,2357,,,,2335542,i,,,, A,1357B,,,2675342,i,,3239,,,,189543,,,,1894,,再求出它们的乘积矩阵C,并将C矩阵的右下角2×3子矩阵赋给D矩阵。
赋值完成后,调用相应的命令查看MATLAB工作空间的占用情况。
A=[1,2,3,3;2,3,5,7;1,3,5,7;3,2,3,9;1,8,9,4];B=[1+4i,4,3,6,7,8;2,3,3,5,5,4+2i;2,6+7i,5,3,4,2;1,8,9,5,4,3];C=A*B;D=C(4:5,4:6);whosName Size Bytes Class AttributesA 5x4 160 doubleB 4x6 384 double complexC 5x6 480 double complexD 2x3 96 double complex 2 选择合适的步距绘制出下面的图形,其中 sin(/)1tt,,(,)11t=[-1:0.1:1];y=sin(1./t);plot(t,y)13 对下面给出的各个矩阵求取矩阵的行列式、秩、特征多项式、范数、特征根、特征向量和逆矩阵。
5765753500..,,,,,,,,71087833410.,,,,, B,A,,,,,681090910315,.,,,,579100037193..,,,,12343324,,,,,,,,,,56785518,,,,,, C,D,,,,,910111211857,,,,,131415165131,,,,,,,A=[7.5,3.5,0,0;8,33,4.1,0;0,9,103,-1.5;0,0,3.7,19.3];B=[5,7,6,5;7,10,8,7;6,8,10,9;5,7,9,10]; C=[1:4;5:8;9:12;13:1rtf6];D=[3,-3,-2,4;5,-5,1,8;11,8,5,-7;5,-1,-3,-1];det(A);det(B);det(C);det(D);rank(A);rank(B);rank(C);rank(D);a=poly(A);b=poly(B);c=poly(C);d=poly(D);norm(A);2norm(B);norm(C);norm(D);[v,d]=eig(A,'nobalance');[v,d]=eig(B,'nobalance');[v,d]=eig(C,'nobalance');[v,d]=eig(D,'nobalance');m=inv(A);n=inv(B);p=inv(C);q=inv(D);4 求解下面的线性代数方程,并验证得出的解真正满足原方程。
72124,1321390,,,,,,,,,,,,,,,,721264,915327,,,,,,,,,(a),(b)X,X,,,,,,,,,91532117,,,,221151,,,,,,,,,,,,2211521132130,,,,,,,,(a)A=[7,2,1,-2;9,15,3,-2;-2,-2,11,5;1,3,2,13];B=[4;7;-1;0];X=A\B;C=A*X;(b)A=[1,3,2,13;7,2,1,-2;9,15,3,-2;-2,-2,11,5];B=[9,0;6,4;11,7;-2,-1];X=A\B;C=A*X;5.(1) 初始化一10*10矩阵,其元素均为1 ones(10,10);(2) 初始化一10*10矩阵,其元素均为0 zeros(10,10);(3) 初始化一10*10对角矩阵v=[1:10];diag(v);(4) 输入A=[7 1 5;2 5 6;3 1 5],B=[1 1 1; 2 2 2; 3 3 3],执行下列命令,理解其含义A(2, 3) 表示取A矩阵第2行、第3列的元素;3A(:,2) 表示取A矩阵的第,列全部元素;A(3,:) 表示取A矩阵第,行的全部元素;A(:,1:2:3)表示取A矩阵第1、3列的全部元素;A(:,3).*B(:,2)表示A矩阵第3列的元素点乘B矩阵第2列的元素A(:,3)*B(2,:)表示A矩阵第3列的元素乘以B矩阵第2行 A*B 矩阵AB相乘A.*B矩阵A点乘矩阵BA^2矩阵A的平方A.^2矩阵表示求矩阵A的每一个元素的平方值B/A 表示方程AX=B的解XB./A表示矩阵B的每一个元素点除矩阵A的元素6在同一坐标系中绘制余弦曲线y=cos(t-0.25)和正弦曲线y=sin(t-0.5),t?[0,2π],用不同颜色,不同线的类型予以表示,注意坐标轴的比例控制。
t=[0:0.01:2*pi];y1=cos(t-0.25);plot(t,y1,'r--')hold ony2=sin(t-0.5);plot(t,y2,'k')4实验二 Matlab编程1分别用for和while循环结构编写程序,求出63i236263 K,,,,,,,,2122222?,,i0并考虑一种避免循环的简洁方法来进行求和。
(a)j=1;n=0;sum=1; for n=n+1:63for i=1:nj=j*2;endsum=sum+j;j=1;endsum(b)j=1;n=1;sum=1;while n~=64i=1;while i<n+1j=j*2;i=i+1;endn=n+1;sum=sum+j;j=1;endSum(c)i=0:63;k=sum(2.^i);2计算1+2+…+n<2000 时的最大 n 值s=0;m=0;while(s<=2000),m=m+1;s=s+m;end,m3 用MATLAB语言实现下面的分段函数,hxD,,, yfxhDx,,()/,xD,,,,,,hxD,,存放于文件ff.m中,令D=3,h=1求出,f(-1.5), f(0.5), f(5).D=3;h=1;x=-2*D:1/2:2*D;y=-h*(x<-D)+h/D./x.*((x>=-D)&(x<=D))+h*(x>D);5plot(x,y);grid onf1=y(find(x==-1.5))f2=y(find(x==0.5))f3=y(find(x==5))实验三 Matlab底层图形控制 1 在MATLAB命令行中编程得到y=sin(t)和y1=cos(t)函数, plot(t,y);figure(10);plot(t,y1);>> t=[-pi:0.05:pi];>> y=sin(t);>> y1=cos(t);>> plot(t,y)>> figure(10);>> plot(t,y1)2 在MATLAB命令行中键入h=get(0),查看根屏幕的属性,h此时为根屏幕句柄的符号表示,0为根屏幕对应的标号。
>> h=get(0)h =BeingDeleted: 'off'BusyAction: 'queue'ButtonDownFcn: ''CallbackObject: []Children: [2x1 double]Clipping: 'on'CommandWindowSize: [89 27]CreateFcn: ''CurrentFigure: 1DeleteFcn: ''Diary: 'off'DiaryFile: 'diary'Echo: 'off' FixedWidthFontName: 'Courier New' Format: 'short'FormatSpacing: 'loose' HandleVisibility: 'on'HitTest: 'on'Interruptible: 'on'Language: 'zh_cn.gbk' MonitorPositions: [1 1 1440 900] More: 'off'6Parent: []PointerLocation: [1048 463] PointerWindow: 0RecursionLimit: 500 ScreenDepth: 32 ScreenPixelsPerInch: 96 ScreenSize: [1 1 1440 900] Selected: 'off' SelectionHighlight: 'on' ShowHiddenHandles: 'off'Tag: ''Type: 'root'UIContextMenu: []Units: 'pixels'UserData: []Visible: 'on'3 h1=get(1);h2=get(10), 1, 10分别为两图形窗口对应标号,其中1为Matlab自动分配,标号10已在figure(10)中指定。