一种结合SIFT和边缘信息的多源遥感影像匹配方法_叶沅鑫
第38卷第10期2013年10月武汉大学学报·信息科学版
Geomatics and Information Science of Wuhan University
Vol.38No.10
Oct.2013
收稿日期:2013-06-
05。项目来源:国家973计划资助项目(2012CB719904,2011CB302306,2012CB719901)
;中央高校博士研究生自主科研经费资助项目(201121302020002
)。文章编号:1671-8860(2013)10-1148-04文献标志码:A
一种结合SIFT和边缘信息的
多源遥感影像匹配方法
叶沅鑫1,2 单 杰1,3 熊金鑫1 董来根
1
(1 武汉大学遥感信息工程学院,武汉市珞喻路129号,430079
)(2 西南交通大学地球科学与环境工程学院,成都市二环路北一段111号,610031
)(3 普渡大学土木工程学院,美国西拉法叶,47907
)摘 要:针对多源遥感影像间几何变形和灰度差异造成的匹配困难问题,提出一种结合SIFT和边缘信息的影像匹配方法。首先在高斯差分尺度空间进行特征点检测,并采用相位一致性提取可靠的边缘信息;然后结
合改进的SIFT和形状上下文对特征点进行描述;
最后将欧氏距离和χ2
统计作为相似性测度获取同名点。相比于SIFT算法,本文方法可有效地提高匹配正确率,并获得更多的同名点。关键词:遥感影像;影像匹配;边缘点;SIFT;形状上下文中图法分类号:P237.3
近年来,
计算机视觉领域的局部不变性特征在影像匹配方面得到广泛应用[1
],其中最具代表性的
是SIFT算子[2-4]
。但是,SIFT算子是基于局部梯
度信息来进行特征描述的,
当影像间灰度差异较大时,尤其是非线性的灰度差异,局部的梯度信息不
能提供稳定的特征[
5
],其性能有所下降。考虑到边缘信息和线特征受灰度差异影响较小的特点,李芳
芳[6
]提出一种基于线特征和SIFT点特征的多源遥感影像配准方法。Mortensen[7]则通过把全局形状
信息融入SIFT特征,提高了匹配的正确率。本文针对遥感影像特点,提出一种结合SIFT特征和边缘信息的影像匹配方法,旨在克服多源情况下的匹配困难问题,
保证方法的有效性和鲁棒性。1 多源遥感影像匹配方法
1.1 特征检测
特征检测包括特征点检测和边缘点检测。为了在影像间提取具有尺度(分辨率)不变性的特征点,首先建立影像的高斯尺度空间,并通过高斯尺度空间的相邻两层影像相减得到DoG尺度空间,然后在该空间中进行极值检测得到特征点,并统计特征点邻域内像素的梯度方向直方图,选择梯
度幅值最大的方向作为该特征点的主方向,最终得到的特征点具有位置、尺度和主方向3个属性。
针对影像间灰度差异较大所造成的边缘检测不一致问题,
引入具有局部光照和对比度不变性的相位一致性算法。相位一致性算法是一种基于频率域的特征检测方法,
其主要依据是角点、边缘等特征出现在图像Fourier谐波分量叠合最大的
相位处[
9-
10]。图像的相位一致性计算公式为:PC(x,y)=
∑o
∑n
W
o
(x,y)Ano(x,y)ΔΦno(
x,y)-T∑o
∑n
A
no
(x,y)
+ε(1
)ΔΦno(x,y)=cos(φno(x,y)-珔φ(x,y))- sin(φno(x,y)-珔φ(x,y))(2
)式中,(x,y)为图像的坐标;Wo(x,y)为频率扩展的权重因子;Ano(x,y)和φno(x,y)为像点(x,y)在Log Gabor滤波器尺度n和方向o上的振幅和相位;珔φ(x,y)为加权的平均相位;符号表示值为正时取本身,否则取0;T为噪声阈值;ε是一个避免除零的常数。相位一致性的最大矩代表了图像
的边缘特征[
11]
,其计算式为:
第38卷第10期叶沅鑫等:一种结合SIFT和边缘信息的多源遥感影像匹配方法
M=
12(∑θ
(PC(θ)sin(θ))2+(PC(θ)cos(θ))[]2
+4∑θ(PC(θ)sin(θ))(PC(θ)cos(θ()))2
+∑θ
(PC(θ)cos(θ))2-(PC(θ)sin(θ))[
]()2
槡
2
)(3)式中,PC(θ)
表示
滤波方向θ的相位一致性值[
10-
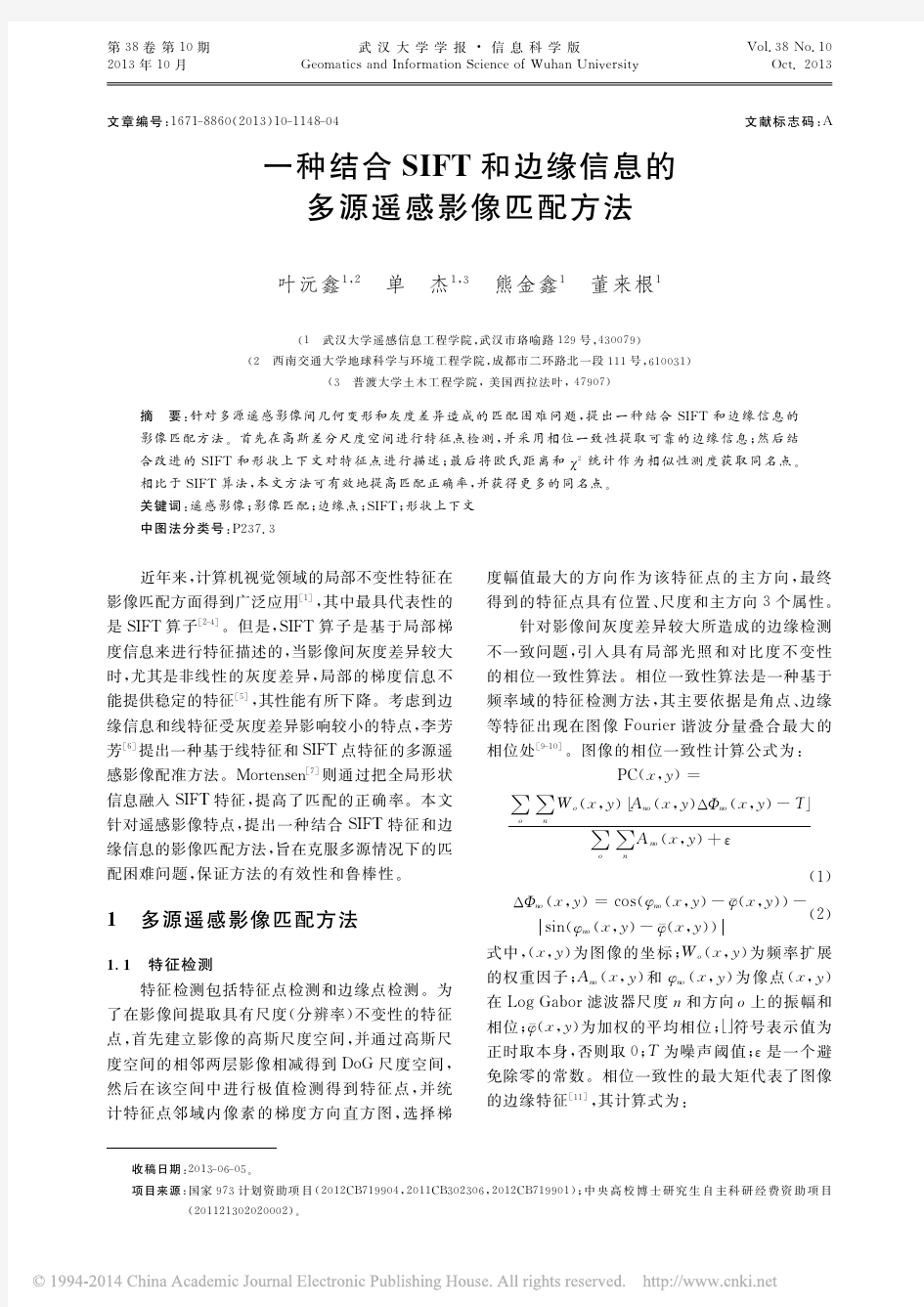
11]。在边缘点检测的过程中,首先计算影像的相位一致性最大矩特征,然后在相位一致性最大矩特征图上进行非极大值抑制得到边缘点。图1显示了利用相位一致性最大矩对同一地区的TM 3(可见光)和TM 7(红外)影像进行边缘点检测的过程。由于两幅影像采自不同类型的波段,所以影像间的灰度差异较大。尽管如此,
它们的相位一致性最大矩特征图比较相似,而且经过非极大值抑制得到的边缘点的重复率也较高。
图1 利用相位一致性最大矩对TM
3和TM
7进行边缘点检测Fig.1 Edge Points Extracted Using
the MaximumMoment of Phase Congurency
for TM Band 3and Band 7Imag
es1.2 特征描述
SIFT是基于局部的梯度信息,
其性能受影像间灰度差异影响较大。本文对SIFT进行改进,并与描述边缘点信息的形状上下文(shape con-text
)相结合,建立一种更为可靠的特征描述子,定义为LT,S[]T T
。其中,L表示代表局部特征的改进的SIFT描述子,S表示在一个较大邻域内计算的shape context描述子,以此来区分影像间相似的局部区域。
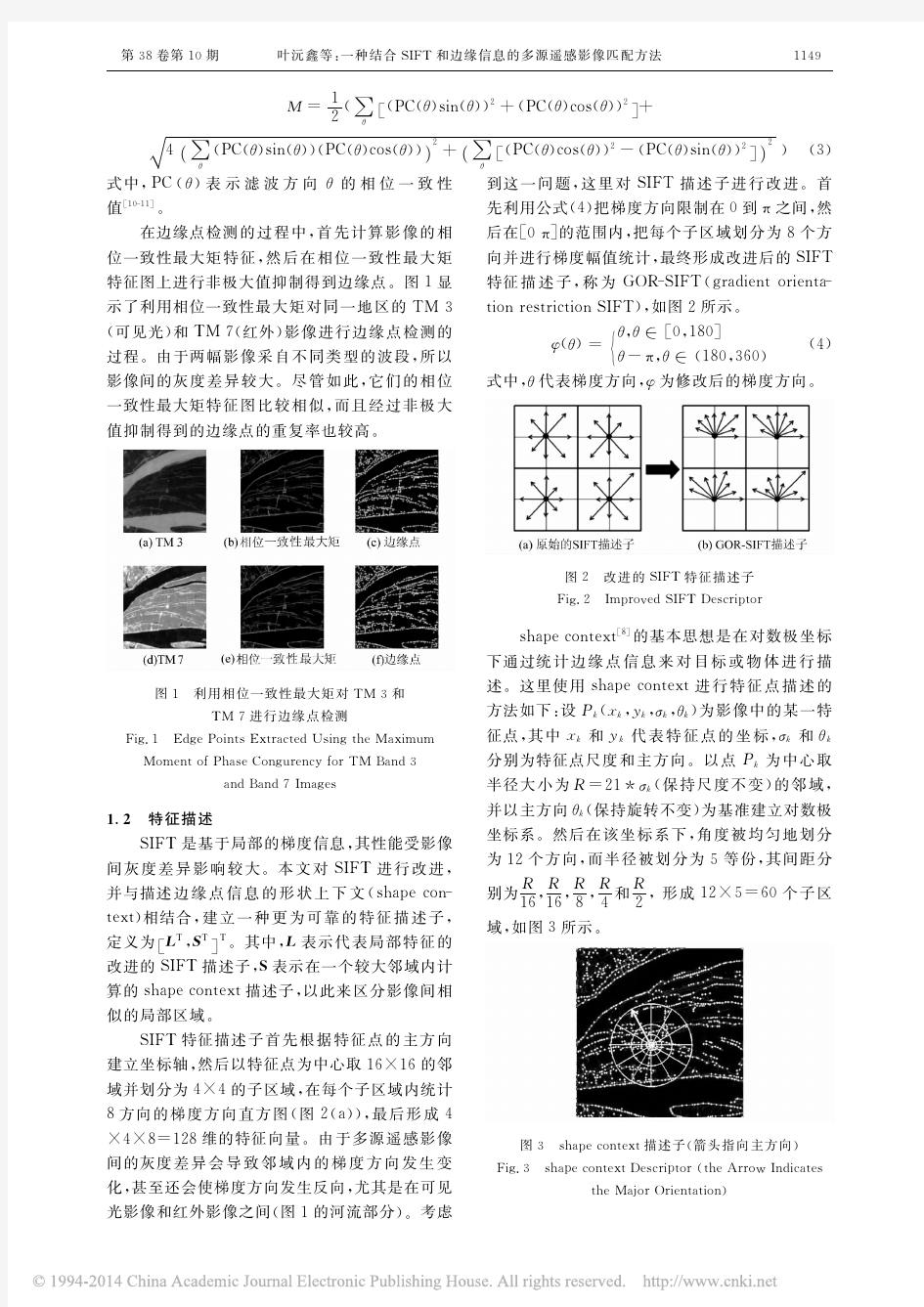
SIFT特征描述子首先根据特征点的主方向建立坐标轴,然后以特征点为中心取16×16的邻域并划分为4×4的子区域,
在每个子区域内统计8方向的梯度方向直方图(图2(a)),最后形成4×4×8=128维的特征向量。由于多源遥感影像间的灰度差异会导致邻域内的梯度方向发生变化,
甚至还会使梯度方向发生反向,尤其是在可见光影像和红外影像之间(
图1的河流部分)。考虑到这一问题,这里对SIFT描述子进行改进。首先利用公式(4)把梯度方向限制在0到π之间,然后在[0π]的范围内,把每个子区域划分为8个方向并进行梯度幅值统计,最终形成改进后的SIFT特征描述子,称为GOR-SIFT(g
radient orienta
-tion restriction
SIFT),如图2所示。φ(
θ)=θ,θ∈[
0,180]θ-π,θ∈(
180,360{
)(4
)式中,θ代表梯度方向,φ为修改后的梯度方向。
图2 改进的SIFT特征描述子Fig.2 Improved SIFT Descrip
torshap
e context[8]
的基本思想是在对数极坐标下通过统计边缘点信息来对目标或物体进行描
述。这里使用shape context进行特征点描述的方法如下:设Pk(xk,yk,σk,θk)为影像中的某一特征点,其中xk和yk代表特征点的坐标,σk和θk
分别为特征点尺度和主方向。以点Pk为中心取半径大小为R=
21*σk(保持尺度不变)的邻域,并以主方向θk(
保持旋转不变)为基准建立对数极坐标系。然后在该坐标系下,
角度被均匀地划分为12个方向,
而半径被划分为5等份,其间距分别为R16,R16,R8,R4和R2,形成12×5=60个子区
域,
如图3所示。图3 shape context描述子(箭头指向主方向)Fig.3 shape context Descrip
tor(the Arrow Indicatesthe Maj
or Orientation)9
411
武汉大学学报·信息科学版2013年10月
对于邻域内的某一边缘点Pe(xe,ye),它在对数极坐标系统下对应的子区域位置(a,d)
为:a
=
6πatanye-yk
xe-x()k
-θ()
k
(5
)d=max 1,log
2
‖Pe
-Pk
‖()R+
6()(
6)式中,a和d分别代表点Pe在角度和径向方向上的位置,‖·‖表示L2-范数。统计每个子区域内边缘点的数量,并利用式(7)对边缘点进行反向的高斯距离加权,形成shape context描述子。反向距离加权是为了使GOR-
SIFT邻域外的边缘点在shap
e context描述子中的贡献更大,增强描述子区分影像间相似局部区域的能力[
7]:w(x,y)=1-e-((
xe-xk
)2+(ye-yk)2)/
2σk(7) 对于每一个特征点,
其描述子是188维的特征向量,其中128维来自GOR-SIFT,其余60维来自shape context。这里形成的描述子被称为GOR-SIFT+SC。1.3 特征点匹配
对于描述子中的GOR-SIFT和shap
e con-text两部分,
分别采用欧氏距离和χ2
统计作为相似性测度,
其计算公式如下:dL=Li-Lj=
∑k
(Li,k-Lj,
k)槡
2
(8)dS=χ2
=
12∑k
(Si,k-Sj,
k)2
Si,k+Sj,k(9
)最终的距离为:
d=dL+dS
(10)式中,L表示GOR-SIFT描述子中的特征向量,S表示shap
e context描述子中的特征向量。这里采用特征点对之间的最近邻和次近邻距离之比dratio来进行匹配,当dratio小于给定阈值(如0.6
)时,该特征点对被视为匹配点对。2 实验与分析
分别选用2组多源遥感影像进行匹配,其中一组光谱差异较大,另一组时相差异较大。通过正确匹配点数量和匹配正确率来对SIFT、GOR-SIFT和GOR-SIFT+SC
3种描述子进行比较和分析。在匹配过程中,利用随机采样一致性算法(RANSAC)并以投影变换作为几何约束条件,剔除错误的匹配。
2.1 实验1—
——光谱差异较大的多源影像匹配本组实验使用的数据是位于武汉市郊区的SPOT4波段2影像(可见光)和ETM+波段6影
像(热红外)。前者作为参考影像,分辨率为20m,影像大小为802像素×676像素,
获取时间为2002-10;后者作为待匹配影像,分辨率为30m,影像大小为832像素×872像素,获取时间为2002-08。影像间不仅存在着尺度和旋转差异
(约15°
),而且灰度方面差异较大,在部分区域出现了灰度反转的情况,如图4中的河流部分。
图4 实验1的同名点Fig.4 Corresp
ondences in Test 1分别在参考影像和待匹配影像上提取了3 966个和7 956个特征点,利用SIFT、GOR-
SIFT和GOR-SIFT+SC 3种描述子进行匹配。图4为三种描述子所得到的同名点(正确匹配)
。表1 实验1的匹配结果Tab.1 Matching
Results in Test 1描述子匹配点/对
正确匹配/对
匹配正确率/%
SIFT 71 34 47.9GOR-SIFT 73 41 56.2GOR-SIFT+SC
77
55
71.4
从表1可以看出,
在3种描述子中,SIFT所得到的同名点较少,并且匹配正确率较低,这是因为SIFT是基于局部邻域内的梯度信息,而对于灰度差异较大的影像,局部的梯度信息不能提供
稳定的特征,
从而增加了误匹配的可能性[5]
。由于GOR-SIFT通过把梯度方向限制在0到π的范围内计算特征描述子,在一定程度上减少了影像灰度差异对特征描述子的影响,尤其对于影像间灰度反转的情况,因此相比于SIFT,GOR-
SIFT在匹配性能上有所提升。相比于以上两种描述子,GOR-SIFT+SC获得了更多的同名点和更高的匹配正确率,表明利用边缘点信息作为约束可有效地避免误匹配的现象。
2.2 实验2—
——时间差异较大的多源影像匹配实验2采用位于美国旧金山市区的2011-10的WorldView波段1影像和2007-11的Quick-
0
511
第38卷第10期叶沅鑫等:一种结合SIFT和边缘信息的多源遥感影像匹配方法
Bird波段2影像进行匹配,分辨率分别为2m和2.4m,大小分别为1 287像素×1 250和725像素×792像素,前者作为参考影像,后者作为待匹配影像。从图5可见,参考影像的覆盖范围明显大于待匹配影像,
并且影像间存在旋转变形(约20°
)和灰度差异。由于影像位于城区,影像中存在一些比较相似的建筑物和局部区域,容易导致误匹配。此外,几乎4a的时相差异造成了某些地区已经发生变化,这更增加了匹配的难度
。
图5 实验2的同名点Fig.5 Corresp
ondences in Test 2分别在参考影像和待匹配影像上提取了10 258个和4
254个特征点,然后利用SIFT、GOR-SIFT和GOR-SIFT+SC 3种描述子进行匹配。图5显示了3种描述子所得到的同名点。
表2 实验2的匹配结果Tab.2 Matching
Result in Test 2描述子匹配点/对
正确匹配/对
匹配正确率/%
SIFT 73 40 54.8GOR-SIFT 72 41 56.9GOR-SIFT+SC
75
52
69.3
表2列出了匹配的分析结果。由表可知,GOR-SIFT+SC获得的同名点数量较多且匹配正确率较高,表明GOR-SIFT+SC通过在较大的邻域内统计边缘点信息增强了描述子区分局部相似区域的能力,
抵抗影像间的灰度差异。由于本组实验影像不存在明显的灰度反转情况,所以SIFT和GOR-
SIFT得到的匹配结果相差不大。3 结 语
本文通过修改梯度方向对SIFT进行改进,同时把边缘点信息融入到特征描述中,建立了一种将改进的SIFT和shape context相结合的特征描述子,并采用欧氏距离和χ2
统计作为相似性测
度进行匹配。结果表明,
本文方法能够较好地抵抗多源遥感影像间的几何变形和灰度差异,并且
相比于SIFT算法获得了更多的同名点,匹配正确率有较大提升。需要指出的是,由于本文方法使用了相位一致性检测边缘点信息,这个过程在CPU耗时方面不够令人满意,
下一步将对其进行优化和改进,
以提高算法的计算效率。参 考 文 献
[1] 张剑清,
潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2003
[2] Lowe D G.Distinctive Imag
e Features from ScaleInvariant Key Points[J].International Journal ofComp
uter Vision,2004,60(2):91-110[3] Mikolajczy
k K,Schmid C.A Performance Evalua-tion of Local Descriptors[J].IEEE Transaction onPattern Analysis and Machine Intelligence,2005,27(10):1615-
1630[4] 王瑞瑞,
马建文,陈雪.多传感器影像配准中基于虚拟匹配窗口的SIFT算法[J].武汉大学学报·信息
科学版,2011,36(2):163-
166[5] 凌志刚,
梁彦,程咏梅,等.一种稳健的多源遥感图像特征配准方法[J].电子学报,2010,38(12):2 892-2
897[6] 李芳芳,
贾永红,肖本林,等.利用线特征和SIFT点特征进行多源遥感影像配准[J].武汉大学学报·信息科学版,2010,35(2):233-
236[7] Mortensen E N,Deng
H L,Shapiro L.A SIFT De-scriptor with Global Context[C].2005IEEE Com-puter Society
Conference on Computer Vision andPattern Recognition,2005[8] Belongie S,Malik J,Puzicha J.Shape Matching
andObject Recognition Using Shape Contexts[J].IEEETransactions on Pattern Analysis and Machine In-tellig
ence,2002,24(4):509-522[9] Morrone M C,Owens R A.Feature Detection
fromLocal Energy[J].Pattern Recognition Letters,1987,6(5):303-
313[10]Kovesi P.Image Features from Phase Congruency
[J].Journal of Computer Vision Research,1999,1(3):1-
26[11]Kovesi P.Phase Congruency
Detects Corners andEdges[C].The 7th Australasian Conference onDigital Image Computing Techniques and Applica-tions,2003
第一作者简介:叶沅鑫,博士,讲师,从事遥感数据分析与处理研究。
E-mail:yey
uanxin110@163.com(下转第1260页)
1
511
武汉大学学报·信息科学版2013年10月
A Node Localization Method in Wireless Sensor Network
Basedon K-means
ClusterFENG Xin1 ZHANG Peng2,
3 XU Yaming 2,
3 ZOU Jing
ui 2,
3
(1 Wuhan Surveying-Geotechnical Research Institute CO.,LTD.of MCC,17Yej
in Road,Wuhan 430080,China)(2 School of Geodesy
and Geomatics,Wuhan University,129Luoyu Road,Wuhan 430079,China)(3 Key Laboratory of Precise Engineering &Industry
Surveying,NASMG,129Luoyu Road,Wuhan 430079,China)Abstract:Considering the influence of the environmental difference in the same localizationcircumstance,we proposes a node localization algorithm based on clustering in this paper.This algorithm can realize nodes clustering by using the RSSI-similarity degree in space envi-ronment,and succeed in localization estimation with different model parameters.Experimen-tal results show that the proposed algorithm has a better localization accuracy than some RS-SI alg
orithm.Key
words:wireless sensor network;node localization;cluster analysis;RSSIAbout the first author:FENG Xin,master,majors in node localization in wireless sensor network.E-mail:806965998@qq
檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪
.com(上接第1151页)
A Matching Method Combining
SIFT and Edge Information forMulti-source Remote Sensing
ImagesYE Yuanxin1 SHAN Jie1,
3 XIONG Jinxin1
DONG Laig
en1(1 School of Remote Sensing
and Information Engineering,Wuhan University,129Luoyu Road,Wuhan 430079,China)(2 Faculty of Geosciences and Enviromental Engineering,Southwest Jiaotong
University,111North-Erhuan Road,Cheng
du 610031,China)(3 School of Civil Engineering,Purdue University,West Lafay
ette,IN 47907,USA)Abstract:In order to address the problem of matching multi-source remote sensing
imageswith geometric distortions and intensity differences,this paper proposes a matching methodby combing
SIFT and edge information.The feature points are first detected in Difference-of-Gaussian(DoG)scale space,followed by the phase congruency to extract the edge informa-tion.Then the descriptors of the feature points are built by combining
improved SIFT andshape context.Finally,we use the Euclidean distance andχ2
statistic as the similar metric todetermine the correspondences.The experiment results show that the proposed method a-chieves a higher correct matching rate and more correspondences than SIFT matching algo-rithm
Key
words:remote sensing image;image matching;edge points;SIFT;shape contextAbout the first author:YE Yuanxin,Ph.D,lecturer,majors in remote sensing image analysis and processing.E-mail:yey
uanxin110@163.com0
621
SIFT特征点提取与匹配算法
SIFT 特征点匹配算法 基于SIFT 方法的图像特征匹配可分为特征提取和特征匹配两个部分,可细化分为五个部分: ① 尺度空间极值检测(Scale-space extrema detection ); ② 精确关键点定位(Keypoint localization ) ③ 关键点主方向分配(Orientation assignment ) ④ 关键点描述子生成(Keypoint descriptor generation ) ⑤ 比较描述子间欧氏距离进行匹配(Comparing the Euclidean distance of the descriptors for matching ) 1.1 尺度空间极值检测 特征关键点的性质之一就是对于尺度的变化保持不变性。因此我们所要寻找的特征点必须具备的性质之一,就是在不同尺度下都能被检测出来。要达到这个目的,我们可以在尺度空间内寻找某种稳定不变的特性。 Koenderink 和Lindeberg 已经证明,变换到尺度空间唯一的核函数是高斯函数。因此一个图像的尺度空间定义为:(,,)L x y σ,是由可变尺度的高斯函数(,,)G x y σ与输入图像(,)I x y 卷积得到,即: ),(),,(),,(y x I y x G y x L *=σσ (1.1) 其中:2222/)(221 ),,(σπσσy x e y x G +-= 在实际应用中,为了能相对高效地计算出关键点的位置,建议使用的是差分高斯函数(difference of Gaussian )(,,)D x y σ。其定义如下: ) ,,(),,() ,()),,(),,((),,(σσσσσy x L k y x L y x I y x G k y x G y x D -=*-= (1.2) 如上式,D 即是两个相邻的尺度的差(两个相邻的尺度在尺度上相差一个相乘系数k )。
SIFT特征点提取与匹配算法
二 特征点提取算法 1、基于SIFT (Scale Invariant Feature Transform )方法的图像特征匹配 参看David G. Lowe 的“Distinctive Image Features from Scale-Invariant Keypoints ” 基于SIFT 方法的图像特征匹配可分为特征提取和特征匹配两个部分,可细化分为五个部分: ① 尺度空间极值检测(Scale-space extrema detection ); ② 精确关键点定位(Keypoint localization ) ③ 关键点主方向分配(Orientation assignment ) ④ 关键点描述子生成(Keypoint descriptor generation ) ⑤ 比较描述子间欧氏距离进行匹配(Comparing the Euclidean distance of the descriptors for matching ) 1.1 尺度空间极值检测 特征关键点的性质之一就是对于尺度的变化保持不变性。因此我们所要寻找的特征点必须具备的性质之一,就是在不同尺度下都能被检测出来。要达到这个目的,我们可以在尺度空间内寻找某种稳定不变的特性。 Koenderink 和Lindeberg 已经证明,变换到尺度空间唯一的核函数是高斯函数。因此一个图像的尺度空间定义为:(,,)L x y σ,是由可变尺度的高斯函数(,,)G x y σ与输入图像(,)I x y 卷积得到,即: ),(),,(),,(y x I y x G y x L *=σσ (1.1) 其中:2222/)(221 ),,(σπσσy x e y x G +-= 在实际应用中,为了能计算的相对高效,所真正使用的是差分高斯尺度空间(difference of Gaussian )(,,)D x y σ。其定义如下: ) ,,(),,() ,()),,(),,((),,(σσσσσy x L k y x L y x I y x G k y x G y x D -=*-= (1.2) 如上式,D 即是由两个相邻的尺度的差(两个相邻的尺度在尺度上相差一个相乘系数k )。
基于SIFT特征的图像匹配
毕业设计(论文)题目基于SIFT特征的图像匹配 姓名张建华 学号0811111101 所在学院理学院 专业班级08信计 指导教师吴颖丹 日期2012 年 6 月 2 日
摘要 当今社会已经进入信息时代,随着计算机技术、通信技术和数学的发展,图像信息处理能力和水平也不断提高,相应的也得到更多关注、研究和更加广泛的应用。图像匹配是处理和解决各种图像信息的基础,已经成为虚拟现实和计算机可视化领域的研究热点。一直以来,研究人员对图像匹配技术进行了大量的研究,推出了许多匹配算法,其中特征匹配算法有着较高的精确度和稳定性。SIFT (Scale Invariant Feature Transform)特征匹配算法是Lowe提出来的用于图像特征匹配的算法,是目前特征匹配领域的热点,对图像的旋转,尺度缩放和亮度变换保持不变,对视角变换,仿射变换保持一定程度的稳定。SIFT特征点是图像的一种尺度不变局部特征点,具有独特性好,信息量丰富,多量性,高速性,可扩展性等特点。正是借助于这些特点,使得传统图像配准中的许多诸如前面提到的共性问题得到了很大程度的改善。该算法首先给出了尺度空间的生成方法,检测出极值点;接下来给出了SIFT特征点的提取步骤和精确定位极值点的方法;然后基于特征点邻域像素的梯度和方向生成了关键点的描述向量;最后根据特征向量给出了匹配方法,提取了SIFT的特征点,并其应用于图像匹配。 本文首先简要介绍了图像匹配所需的基础知识,然后详细介绍了SIFT算法的具体流程。通过大量的实验证明SIFT算法具有较强的匹配能力和鲁棒性,是一种较好的图像匹配算法。 关键字:SIFT; 图像匹配; 尺度空间; 极值点; 特征向量
基于ransac算法的sift特征匹配研究(OpenCV+VS2010)____朱万革(最终版)
SHANGHAI JIAO TONG UNIVERSITY 学士学位论文 THESIS OF BACHELOR 基于ransac算法的sift特征匹配研究(OpenCV+VS2010)
上海交通大学 毕业设计(论文)学术诚信声明 本人郑重声明:所呈交的毕业设计(论文),是本人在导师的指导下,独立进行研究工作所取得的成果。除文中已经注明引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写过的作品成果。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律结果由本人承担。 作者签名: 日期:年月日
上海交通大学 毕业设计(论文)版权使用授权书 本毕业设计(论文)作者同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权上海交通大学可以将本毕业设计(论文)的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本毕业设计(论文)。 保密□,在年解密后适用本授权书。 本论文属于 不保密□。 (请在以上方框内打“√”) 作者签名:指导教师签名: 日期:年月日日期:年月日
视频图像跟踪系统 摘要 图像(Image)--是客观世界的景物通过光学系统作用后产生的影像。图像直观地反映了场景中物体的颜色、亮度等特征,从而使我们能清晰分辨他们的形状、大小和空间位置。近30年来人们试图研究基于计算机的视觉系统,并且试图利用其系统来代替工业农业上的有害劳动。这样的视觉系统渐渐地进入我们的生活,让我们的生活变得很丰富,并且我们现在享受着图像处理这学问的成果。在世界上的先进的国家都设立了图像处理研究所,研究解决国防部门所要的问题。 本文将介绍基于OpenCV(Open Source Computer Vision Library)的视频图像匹配、拼接、融合和目标跟踪的算法以及方法。说到图像拼接,本文中所用的图像拼接算法是高效的SIFT特征算法。首先,用两个通用的USB摄像头来实时地进行采集图像,并对这两幅图像提取SIFT特征点。然后,进行粗匹配。最后用RANSAC算法对所提取出来的SIFT特征点匹配对进行提纯以及估计模型参数。最后把两幅图像拼接成一幅完整的图像,并且用加权平均算法进行无缝拼接。再进行摄像头标定,求出两个通用摄像头的内外参数,最后进行测距以及跟踪。最终取得了令人满意的结果。 关键词:SIFT,匹配,拼接,配准,RANSAC