机器人等离子切割应用总结

机器人等离子切割应用总结
一、等离子切割机与机器人连接
1.等离子切割机组成
等离子切割机主要由:电源,高频装置,气体流量控制装置,开关阀,割炬组成。
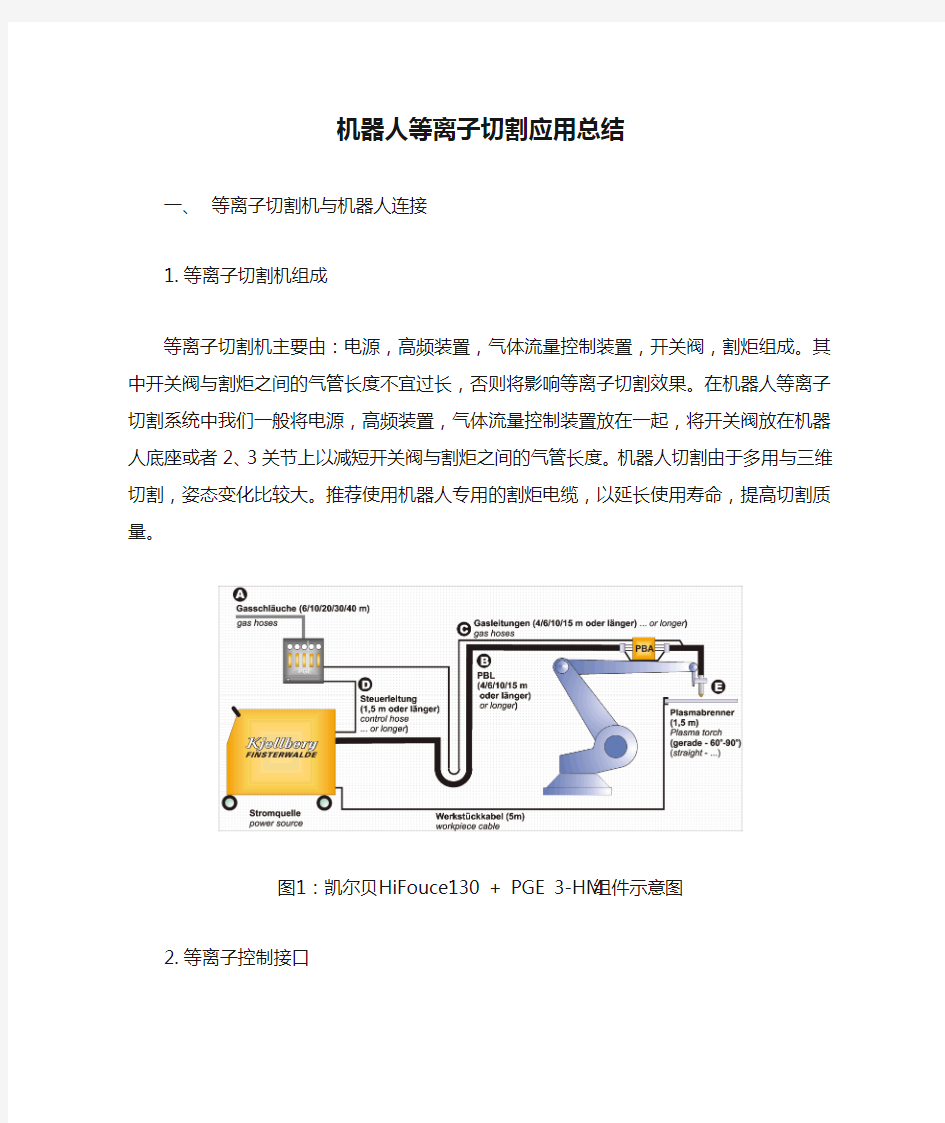
其中开关阀与割炬之间的气管长度不宜过长,否则将影响等离子切割效果。在机器人等离子切割系统中我们一般将电源,高频装置,气体流量控制装置放在一起,将开关阀放在机器人底座或者2、3关节上以减短开关阀与割炬之间的气管长度。机器人切割由于多用与三维切割,姿态变化比较大。推荐使用机器人专用的割炬电缆,以延长使用寿命,提高切割质量。
图1:凯尔贝HiFouce130 + PGE 3-HM组件示意图
2.等离子控制接口
目前我们使用的等离子均为手动控制,即切割电流,转角电流,提升、下降比率等电源参数以及离子气流量,涡流气流量等气体流量参数均由操作人员通过等离子的操作面板进行手动调整。这样在实际生产中,发生切割材料变化时,无法通过预制程序完成相应的参数设定,仅适用于单一材质,厚度,切割方式的大批量切割。
1)电源参数调节
图2:凯尔贝HiFouce130电源操作面板
其中需要进行调节的有如下按钮:
4:切割工艺表选择开关。主要用于选择不同厚度,不同材质切割工艺参数表,类似于焊机中的job设定。
12:切割电流旋钮。主要用于调节切割电流。
13:拐角电流选择开关。在切割时如果需要切割拐角,机器人在尖角处需要减速停止再加速,在这个过程中如果依旧采用相同的电流,会导致拐角部位过烧。
为了解决这个问题,可以通过调整该开关减小拐角处的切割电流以得到良好的切割效果。该开关只能选择拐角电流为电流设定值的百分比。
2)气体参数调节
图3:PGE 3-HM气体控制器面板图
通过PGE 3-HM仅可以调节气体的流量,气体的压力仅可以显示。气体压力需要通过外部的压力阀进行调节。
3)切割参数表
图4:典型切割参数表
切割机的用户手册总均配有切割参数表和消耗品列表,在进行切割前需要根据切割对象的材质,厚度选择相应的消耗品和切割参数。上图中切割不仅将参数做了标示,而且还标示了气体控制器和电源上需要进行调节的旋钮位置。
在进行初次切割时,希望根据切割参数表进行调整,再根据切割效果进行微调。
等离子切割的控制比较简单,内部几乎都使用继电器触点(海宝多使用光耦)进行输出,连接方便。上图中使用电源公司的电路板进行分压,以便实现弧压调高的功能。分压电路板一般等离子公司有售,但需要特别注明选配。分压比的确定一般满足以下公式即可:
分压比> 最大切割能力下电弧电压* 1.2 / 机器人模拟量最大接收电压以本项目为例,凯尔贝HiFouce130的最大切割弧压为200V,FANUC M20ia机器人可以接收的模拟量为0-10V。计算得到分压比为24,选取比较接近的分压比例为25。
注:分压比与后面弧压跟踪功能的灵敏度设定没有关系,但是为了避免过大的外部干扰影响,一般建议分压后的弧压输出大于机器人模拟量最大接收电压的一半。
3.等离子切割起弧流程
等离子切割可以分为边沿起弧切割和中心穿孔切割。穿孔对等离子消耗件的损耗比较大,穿孔次数多将极大的缩短消耗件的使用寿命,所以对于厚板推荐使用边沿起弧切割。
1)边沿起弧切割流程
图6:边沿起弧切割示意图
边沿起弧多用在中厚板的整体下料切割时。割炬在距离切割对象边沿1-4mm处起弧,在割炬运行至切割对象正上方的过程中弧压逐渐稳定至切割弧压,开始切割。
由于没有穿孔过程,边沿起弧切割可以大大延长消耗件的使用寿命。
2)中心穿孔切割流程
图7:中心穿孔切割示意图
中心穿孔切割是指,割炬在切割对象内部开始起弧,起弧后停留一段时间完成穿孔后再进行后续切割的过程。在进行穿孔的过程中,由于有大量的颗粒飞溅,对消耗件的损耗比较大,所以一般穿孔高度均大于正常切割高度。
以上图为例,中心穿孔切割主要分为4个阶段:
a)机器人通过接触的方式从h1高度,在P1位置找到切割对象(与接触找焊缝
功能一致),然后运行至起弧高度h2。
b)在起弧高度开始起弧,机器人在收到切割机的起弧成功反馈后等待穿孔时
间t1。
c)机器人迅速运行至切割高度h4进行切割。为了避免干扰,高度跟踪功能建
议在此时开启。
d)机器人完成切割轨迹,关闭高度跟踪功能和起弧信号,抬升至h5高度。
4.等离子切割中的常见问题
1)问题:使用普通DI/DO进行切割控制,在发生碰撞或者程序中断的时候切割机不会自动停止切割。
解决方法:使用弧焊指令,将weld start信号和arc detect信号分配给对应的
DI/DO,弧焊包中附带电弧的自动切断功能。
图8:焊接I/O设置
2)问题:有起弧动作,割炬和工件间有火花,但起弧不成功。
解决方法:由于等离子有涡流气,以压缩电弧,所以当割炬离工件太近时电
弧会被涡流气吹灭;当割炬距离工件过远时,引导弧强度无法达到引发主弧,
也会导致无法起弧。调节割炬和工件间距离至合适位置可以改善该情况。
因为使用弧焊软件包,所以在起弧高度较高或者板厚较厚的时候可能因为电
弧检测时间设置过短而导致无法起弧。调节arc start error time和arc detect
time时间至合适值。
图9:电弧检测时间参数设定
3)问题:起弧失败后,机器人出现自动的往返运动,并且不停的出现起弧动作。
解决方法:弧焊软件包中有刮擦起弧功能,将其关闭。弧焊软件包中有很多其他的功能也不适合于切割,为保证切割不受影响,将arc loss和power supply
failure以外的功能均关闭。
图10:焊接监控参数设定
二、A VC功能应用
1.A VC功能介绍
A VC主要应用于TIG焊接中,是一种通过反馈电弧电压大小来调节焊枪与工件之
间高度偏差的方法。该功能与MIG焊接中常用的电弧摆动跟踪(TAST)的原理类似,虽然目前仅在非摆动的情况下进行高度跟踪,但是也可以应用在摆动情况下的焊枪法向偏差的跟踪。
在等离子切割中由于反馈电弧电压的特性与TIG相同:电极远离工件,反馈弧压增大,应向靠近工件方向调节;电极靠近工件,反馈弧压减小,应向远离工件方向调节。
所以在等离子切割时,A VC功能是一种可以很好的保持割炬与工件间距离,从而保证切割质量的方法。
注:在FANUC机器人上A VC功能和TAST功能均属于ARC TOOL软件包,由于分别适用于不同的焊接方式,所以不能在一台机器人上同时安装。
2.A VC主要参数设置
A VC参数主要分为焊接参数、模拟量参数和跟踪参数3个方面:
1)焊接参数设置:
为了确保机器人对起、收弧,运动中断、再启动时电弧控制,我们使用焊接命
令,在焊接参数里必须将焊接模式选为TIG。Controlled Restart后,进入ArcTool
Setup进行更改。
图11:焊接方式更改
2)模拟量参数设置:
FANUC机器人的模拟量可以通过设定比例关系来实现对收到模拟信号的放大和缩小。该参数的设定从一方面来说提高了模拟量的分辨率,但同时也放大了环境干扰。所以该比例不应设置过大,在本例中合理的放大倍数为3-5倍。
注:该参数可以设为反比,也就是说A VC功能其实可以通过TAST功能更改模拟量通道和比例来实现。
图12:模拟量参数设置
3)跟踪参数设置:
跟踪参数很多,但是大部分参数使用默认即可。主要进行调整的有如下几个变量:
a)L_compensation enable(default: TRUE):因为仅进行高度调整,所以将该
参数设置为FALSE,防止因为干扰导致出现水平方向的误调整。
b)V_master voltage type(default: FEEDBACK):设置高度跟踪目标电压获取
方式,主要分为反馈方式和定值方式。
反馈方式以提取到的一个或多个周期的反馈电压值为跟踪的目标值,该值不是由人工设定,而是由机器人自动生成的。这种方式对工件的适应
性较好,在使用前无须做大量工艺实验进行人为数据采集,但也会因为起
始跟踪高度的变化而导致后续切割高度跟踪的整体偏差。
c)
3.A VC程序示例
A VC功能必须在起弧状态下方能生效,所以A VC功能必须写在ARC START与ARC END命令行之间。以下为示例程序:
图13:AVC示例程序
4.A VC应用常见问题
1)问题:采用反馈跟踪时出现撞枪。
解决方法:关闭跟踪功能,在希望的高度下进行切割,观察反馈弧压。如果
反馈弧压波动很大,需要减小弧压反馈放大倍数,并采取一些滤波措施提高
弧压反馈质量。
等离子电弧在起弧时需要一定时间方能将弧压保持稳定,所以通过调节V_compensation start count、V_master sampling start count和V_master
sampling count 这几个参数进行采样的延时,并且通过多次采样取平均值的
方式改善跟踪基准值的采样。
注:在等离子切割时由于切割速度很快,如果采用采样延时,可能反而导致起始段的跟踪效果不好。所以推荐在等离子切割时采用定值跟踪,并且在
电弧稳定后再开始跟踪。
2)问题:有跟踪命令,但是在实际运行时,无跟踪动作。
解决方法:跟踪必须在有电弧时方能工作,确保Weld Enable使能打开,并
且等离子能起弧。
数控等离子切割机使用手册
数控等离子切割机使用 手册 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】
数控等离子切割机 使 用 手 册 济南阿尔法数控设备有限公司 目录
注意 警示标志:应总是留心与下列警示标志相关联的事项: 电气可能引起危险常规警告常规提示 在安装和开始应用前请首先阅读本文档,错误的操作会造成财物和人身伤害。你必须始终检查系统规格和技术条件(参阅设备标签和相关的文档)。 本说明书仅见略介绍操作步骤,更详尽内容请参阅数控系统说明书、等离子电源说明书、弧压调高器说明书和电容调高器说明书。我公司保留对设备配置进行修改的权利,本书内容可能与设备实际情况不符,具体以设备为准。 我公司对不符合操作要求而引起的设备损坏不负保修责任。设备出现故障,请勿擅自更换配件,请先于我公司联系。 1、验收 小心损坏或有故障的产品不可投入使用。 2、运输与储存
注意运输与储存中应注意防潮,不可在产品上攀爬或站立,不可在上面放置重物,前面板和显示屏应特别注意防止碰撞与划伤。 3、安装 小心数控系统的外壳非防水设计,安装时应防止日晒及雨淋。 注意数控系统安装应防止尘埃、腐蚀性气体、导电物体、液体及易燃物侵入。 数控系统应安装在远离易燃、易爆物品、及强电磁干扰的场所。 数控系统安装必须牢固,避免振动。 4、接线 警告参与接线或检查的人员都必须具有做此项工作的充分能力;连接电线不可有破损,不可受挤压,不可带电打开数控系统机箱。 小心任何一个接线插头上的电压值和极性都必须符合说明书的规定。 在插拨插头或扳动开关前,手应保持干燥。 注意所有接线必须正确、牢固。 数控系统必须可靠接地。 5、调试运行 小心运行前,应先检查参数设置是否正确。
机器人课程学习心得体会
机器人课程学习心得体会 机器人是102中的1项必修课程,几近没有想过自己有朝1日会学习如何拼装,操控机器人。但是在学习了1个学年以后,我也学会了1些技能,同时也发现机器人是很成心思的1门学科。 第1节课令我印象很深,老师让我们做1个陀螺。 我记得我做了恨多,我和同学们相互比试看谁转的时间较长。也在这次欢乐又简单的课当中逐步学会了零件的拼接与利用。这就是初步。 机器人制作的难易程度增加的很快。 我们逐步学到了制作简易的小车,使应用更加熟练。 随着课时的增加,我们的制作由易转难,终究到程序的编辑及设计。 我们班固然不缺善于机器人的能人,他们总能以最快的速度制作出1个个灵敏小巧的机器人。而我的机器人制作1直不突出。也不是最快的,也不是最好的。也就算能完成任务。 每次制作机器人时,我们都会在小组中分好工,仔细视察老师的机器人模型,再自己制作。编程时,我们会仔细参考机器人书上的教程,再编好。 学习机器人是1件很费脑力的事情,做每一个机器人之前要勾画出大概的结构,在毛病时还要做调剂。程序也需经过量次的调试,终究才能到达最完善的状态。 有时在做机器人不到位,输入程序后也不能很好地完成任务,所以就要1次又1次重试。有时编程序编错了,就要仔细对比书上的,或问问老师,1遍又1遍的修改完善。虽然进程很辛苦,但看到自己小组做出唯一无2的机器人时,就会有很大成绩感。
机器人课带给我们的不但是搭建机器人时的快乐,还有取得知识的那份快乐!上个学期,学校展开了机器人必修课,我们在课堂上动手实践,了解了1个机器人的基本构造:在课上,我们应用各种零件进行组合,搭建出不同构造的机器人,使它们具有不同的功能。然后根据不同的功能给机器人设计最为适合的机型,使其功能发挥最大作用。这使我们在物理方面有了最基础的了解,也对机器人的设计和制作进程有了1个大概的了解。 这个学期,主要以机器人的编程为主,了解了声感、光感、触感和超声波传感器的利用:在课上,我们主要学习了编程的基本要领,知道了如何使机器人依照自己想要的线路运行,学会了基本的程序设置,和各种传感器的使用方法。 在机器人的课程学习中,我们进行团队合作的方式,完成了1个又1个老师安排的任务,让我从中体会到团队合作的重要性,也了解到许多关于机器人的知识,这将对我以后的生活学习起到重要作用! 如果说,今后还有机器人课程的学习,我将更加认真的完成,争取更深入地了解机器人的构造,编写更加优化的机器人程序! 1月26日,我们1行人在清华大学为期5天的培训结束了。在这次培训中我们分享过欢声笑语,共度过曲折困难;旅游了清华校园,领略了机械魅力。我还记得初到北京的心绪难平,我还记得踏入清华的激动不已,我还记得凝听讲座的惊奇欣喜,我还记得解决问题的眉头紧锁。惋惜的是,5天的时间转眼即逝,我们就要告别首都,告别这片有着深厚历史积淀的校园,回首5天以来的经历,逐日充满着新鲜感的学习生活片断还记忆犹心。简而言之,时间短暂,收获颇丰。
等离子切割工艺及技术
等离子切割 等离子弧切割是利用高温等离子电弧的热量使工件切口处的金属局部熔化(和蒸发),并借助高速等离子的动量排除熔融金属以形成切口的一种加工方法。等离子切割配合不同的工作气体可以切割各种氧气切割难以切割的金属,尤其是对于有色金属(不锈钢、铝、铜、钛、镍)切割效果更佳;其主要优点在于切割厚度不大的金属的时候,等离子切割速度快,尤其在切割普通碳素钢薄板时,速度可达氧切割法的5~6倍、切割面光洁、热变形小、几乎没有热影响区! 等离子切割发展到现在,可采用的工作气体(工作气体是等离子弧的导电介质,又是携热体,同时还要排除切口中的熔融金属)对等离子弧的切割特性以及切割质量、速度都有明显的影响。常用的等离子弧工作气体有氩、氢、氮、氧、空气、水蒸气以及某些混合气体。等离子切割机广泛运用于汽车、机车、压力容器、化工机械、核工业、通用机械、工程机械、钢结构等各行各业。 一、等离子弧切割工艺参数 各种等离子弧切割工艺参数,直接影响切割过程的稳定性、切割质量和效果。主要切割规范简述如下: 1.空载电压和弧柱电压 等离子切割电源,必须具有足够高的空载电压,才能容易引弧和使等离子弧稳定燃烧。空载电压一般为120-600V,而弧柱电压一般为空载电压的一半。提高弧柱电压,能明显地增加等离子弧的功率,
因而能提高切割速度和切割更大厚度的金属板材。弧柱电压往往通过调节气体流量和加大电极内缩量来达到,但弧柱电压不能超过空载电压的65%,否则会使等离子弧不稳定。 2.切割电流 增加切割电流同样能提高等离子弧的功率,但它受到最大允许电流的限制,否则会使等离子弧柱变粗、割缝宽度增加、电极寿命下降。 3.气体流量 增加气体流量既能提高弧柱电压,又能增强对弧柱的压缩作用而使等离子弧能量更加集中、喷射力更强,因而可提高切割速度和质量。但气体流量过大,反而会使弧柱变短,损失热量增加,使切割能力减弱,直至使切割过程不能正常进行。 4.电极内缩量 所谓内缩量是指电极到割嘴端面的距离,合适的距离可以使电弧在割嘴内得到良好的压缩,获得能量集中、温度高的等离子弧而进行有效的切割。距离过大或过小,会使电极严重烧损、割嘴烧坏和切割能力下降。内缩量一般取8-11mm。 5.割嘴高度 割嘴高度是指割嘴端面至被割工件表面的距离。该距离一般为4~10mm。它与电极内缩量一样,距离要合适才能充分发挥等离子弧的切割效率,否则会使切割效率和切割质量下降或使割嘴烧坏。 6.切割速度
数控等离子切割机使用手册总结
数控等离子切割机 使 用 手 册 济南阿尔法数控设备有限公司
目录 注意 (3) 1、验收 (3) 2、运输与储存 (3) 3、安装 (3) 4、接线 (4) 5、调试运行 (4) 6、使用 (4) 7、故障处理 (5) 8、电源供应 (5) 设备安装篇 (7) 对切割机主体和电控柜的连接电缆建议采用地槽走线方式铺设,既保护电缆,又方便维护. (8) 四、电源 (8) 五、气源 (9) 切割操作篇 (9) 一、关于准备 (9) 二、自动调高器的设定 (10) (一)弧压调高器 (10) 三、伺服系统测试 (12) 四、编制切割图形 (12) 1、运用专业绘图软件(如AUTOCAD)绘制切割图形。 (12) 2、使用系统自带图库编辑。 (12) 4、使用系统自带钢板套料功能。 (12) 五、切割参数设定 (12) 1、修改切割参数。 (12) 2、系统设置。 (12) 六、切割过程 (12) 七、切割完毕 (14) 维护保养篇 (15) 附录 (17) 附1、等离子弧切割规范 (17) 1.切割电流 (17) 2.气体流量 (18) 3.割嘴高度 (18) 4.切割速度 (18) 5.切割厚度与工艺 (19) 6.钢板表面预处理 (19) 附2、弧压调高器当前参数设定 (20)
注意 警示标志:应总是留心与下列警示标志相关联的事项: 电气可能引起危险 常规警告常规提示 在安装和开始应用前请首先阅读本文档,错误的操作会造成财物和人身伤害。你必须始终检查系统规格和技术条件(参阅设备标签和相关的文档)。 本说明书仅见略介绍操作步骤,更详尽内容请参阅数控系统说明书、等离子电源说明书、弧压调高器说明书和电容调高器说明书。 我公司保留对设备配置进行修改的权利,本书内容可能与设备实际情况不符,具体以设备为准。 我公司对不符合操作要求而引起的设备损坏不负保修责任。设备出现故障,请勿擅自更换配件,请先于我公司联系。 1、验收 小心损坏或有故障的产品不可投入使用。 2、运输与储存 注意运输与储存中应注意防潮,不可在产品上攀爬或站立,不可在上面放置重物,前面板和显示屏应特别注意防止碰撞与划伤。 3、安装 小心数控系统的外壳非防水设计,安装时应防止日晒及雨淋。
哈工大机器人技术课程总结
第一章绪论 1. 机器人学(Robotics)它包括有基础研究和应用研究两个方面,主要研究内容有:(1) 机械手设计;(2) 机器人运动学、动力学和控制;(3) 轨迹设计和路径规划;(4) 传感器(包括内部传感器和外部传感器);(5) 机器人视觉;(6) 机器人语言;(7) 装置与系统结构;(8) 机器人智能等。 2. 机器人学三原则:(1)机器人不得伤害人(2)机器人应执行人们的命令,除非这些命令与第一原则相矛盾(3)机器人应能保护自己的生存,只要这种保护行为不与第一第二原则相矛盾。 3. 6种型式的机器人: (1) 手动操纵器:人操纵的机械手,缺乏独立性; (2) 固定程序机器人:缺乏通用性; (3) 可编程机器人:非伺服控制; (4) 示教再现机器人:通用工业机器人; (5) 数控机器人:由计算机控制的机器人; (6) 智能机器人:具有智能行为的自律型机器人。 4. 按以下特征来描述机器人: (1)机器人的动作机构具有类似于人或其他生物体某些器官 ( 如肢体、感官等 ) 的功能; (2)机器人具有通用性,工作种类多样,动作程序灵活易变,是柔性加工主要组成部分; (3)机器人具有不同程度的智能,如记忆、感知、推理、决策、学习等;(4)机器人具有独立性,完整的机器人系统,在工作中可以不依赖于人的干预。 5. 机器人主要由执行机构、驱动和传动装置、传感器和控制器四大部分构成 6. 控制方式主要有示教再现、可编程控制、遥控和自主控制等多种方式。 7. 示教-再现即分为示教-存储-再现-操作四步进行。 8. 控制信息顺序信息:位置信息:时间信息: 9. 位置控制点位控制-PTP(Point to Point): 连续路径控制-CP(Continuous Path): 10. 操纵机器人可分为两种类型:能力扩大式机器人:遥控机器人: 11. 第三代智能机器人应具备以下四种机能:运动机能感知机能: 思维能力:人-机对话机能: 智能机器人是一种“认知-适应"的工作方式。 12.目前我国机器人的发展正朝着实用化、智能化和特种机器人的方向发展。
数控等离子切割机的危害性
数控等离子切割机的危害性 结合简单易用的数控系统,利用高温在喷嘴处喷射出来的高速气流离子化,从而形成导电体。当电流通过时,该导气体即形成高温等离子电弧,电弧的热量使工件切口处的金属局部熔化(和蒸发),并借助高速等离子气流的动力排除熔融金属以形成切口的一种加工方法。利用环形气流技术形成的细长并稳定的等离子电弧,保证了能够平稳且经济地切割任何导电的金属。 数控等离子切割机机器的危险性 操作和保养自动化设备涉及潜在的危险,操作人员应谨慎从事,以防受 如果四肢触及运动的机器,可能被缠住,甚至受伤; 手脚远离运动的机器,控制操作CNC 系统可以通过前面板键盘或遥 接口进行; 操作机器时不能穿宽松的衣服及有线绳之类的服饰,以防被机器缠住 数控等离子切割机的高压电 电击能伤人致死,必须按照厂商规定步骤及要求进行安装; 电源接通时,不能接触电线及电缆; 该设备应该且只能由受过培训的人操作。 数控等离子切割机应注意的安全保障 1.设备周围应避免强震动源。 2.工作人员挂牌上岗操作,无关人员不得上机,更不准擅自按动键,以免损坏机器或程序,数据丢失。 等离子切割机应注意的安全保障 1.操作人员必须戴好防护面罩、电焊手套、帽子、滤膜防尘口罩和隔音耳罩。不戴防护镜的人员严禁直接观察等离子弧,裸露的皮肤严禁接近等离子弧。 2.切割时,操作人员应站在上风处操作。可从工作台下部抽风,并宜缩小操作台上的敞开面积。 3.切割时,当空载电压过高时,应检查电器接地、接零和割炬手把绝缘情况,应将工作台与地面绝缘,或在电气控制系统安装空载断路断电器。 4.高频发生器应设有屏蔽护罩,用高频引弧后,应立即切断高频电路。 5.使用钍、钨电极应符合JGJ33-2001第12.7.8条规定。 6.切割操作及配合人员必须按规定穿戴劳动防护用品。并必须采取防止触电、高空坠落、瓦斯中毒和火灾等事故的安全措施。 7.现场使用的电焊机,应设有防雨、防潮、防晒的机棚,并应装设相应的消防器 材。 8.高空焊接或切割时,必须系好安全带,焊接切割周围和下方应采取防火措施,并应有专人监护。 数控等离子切割机安全操作规程
机器人技术期末总结
1、已知点u 的坐标为[7,3,2]T ,对点u 依次进行如下的变换:(1)绕z 轴旋转90°得到点v ;(2)绕y 轴旋转90°得到点w ;(3)沿x 轴平移4个单位,再沿y 轴平移-3个单位,最后沿z 轴平移7个单位得到点t 。求u , v , w , t 各点的齐次坐标。 2、如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x0,y0}下的运动学方程。 θ1 θ2 θ3 L 2 L 1 L 3 x 0 y 0 O 3、如图所示为平面内的两旋转关节机械手,已知机器人末端的坐标值{x ,y },试求其关节旋转变量θ1和θ2. θ1 θ2 L 2 L 1 x y P 4、如图所示的两自由度机械手,手部沿固定坐标系在手上X 0轴正向以1.0m/s 的速度移动,杆长l 1=l 2=0.5m 。设在某时刻θ1=30°,θ2=-60°,求该时刻的关节速度。已知两自由度机械手速度雅可比矩阵为 1121221121221 2 l s l s l s l c l c l c θ θ---??=??+??J θ1 -θ2 l 2 l 1 x 0 y 0 O x 3 y 3v 3 5、如图所示的三自由度机械手(两个旋转关节加一个平移关节,简称RPR 机械手),求末端机械手的运动学方程。 θ3 d 2 θ1 L 1L 2L 3 1、解:点u 的齐次坐标为: u = []7,3,2,1T V= Rot( z,90° )u = 0100731 000370010220 00111--????????????? ?????=?????????????????? w = Rot(y,90°)v = 00103201 007710002300 0111-????????????? ?????=??????-???????????? t = Trans(4,-3,7)w = 1004260 1037400173100 111????????????-? ?????=?????????????????? 2.解:建立如图1的参考坐标系,则 x 0 y 0 O x 1 y 1x 2 y 2 x 3 y 3 10 T =11 1 1000000100001c s s c -???????? ? ???,21T =2 2122000001000 01c s L s c -???????? ???? , 32 T =3323 300000100 01c s L s c -???????? ???? 30 T =10T 21T 32T =12312311212123 12311212000010 01c s L c L c s c L s L s -+????+?????? ?? 3.解:如图2所示,逆运动学有两组可能的解
数控等离子切割机安全操作规程(正式)
数控等离子切割机安全操作 规程(正式) Standardize The Management Mechanism To Make The Personnel In The Organization Operate According To The Established Standards And Reach The Expected Level. 使用备注:本文档可用在日常工作场景,通过对管理机制、管理原则、管理方法以及管理机构进行设置固定的规范,从而使得组织内人员按照既定标准、规范的要求进行操作,使日常工作或活动达到预期的水平。下载后就可自由编辑。 1.操作人员应遵守一般焊工安全操作规 程。按规定穿戴好劳动防护用品。 2.操作人员必须经专门安全技术培训,方 能上岗操作。 3.设备附近禁止存放易燃易爆物品,并应 备有消防器材。 4.严禁在切割机导轨、工作面放置物品。 不得在上面敲打、校直和修整工件。
5.新工件程序输入后,应先试运行,确认无误后再投入运行。 6.开机前应检查导轨、齿条及床身。检查气路系统有泄漏,排放储气筒、油水分离器内积水和杂质。检查消耗品及割炬防撞碰装置。 7.开机后应手动低速X、Y方向开动机床,检查确认有无异常情况。 8.手动升降割炬,检查动作有无异常。 9.起动等离子发生器,根据材料厚度调整气压。 10.切割过程中,观察调高系统及除尘系统工作是否正常,有异常应立即停机处理,排除故障。 11.工作时,操作人员不得离开岗位,注
意观察机床运行情况,以免切割机走出有效行程范围或两台发生碰撞造成事故。 请在这里输入公司或组织的名字 Please enter the name of the company or organization here
数控精细等离子切割机技术要求
数控精细等离子切割机技术要求 一、招标要求: 1.1投标人必须仔细阅读招标文件的全部条款,并作出明确响应。 1.2招标文件中带“*”号的条款及要求,投标方必须满足,若有一项不满足将导致废标。 1.3投标报价: 1.3.1 对设备进行分项报价,按设备分别填写《投标货物数量、价格表》。 1.3.2 投标报价为含税价,且为设备到需方的价格(应含运保费) 1.3.4 投标方递交文本投标文件的同时,需提供与投标文件内容一致的光盘一张。 二、设备规格名称及数量 设备名称:数控精细等离子切割机 规格:有效切割范围:4000×10000mm,两套精细等离子回转坡口割炬, 切割工件介质: 等离子气体:氧气,空气 保护气:氮气、空气 数量:1台 三、设备用途及基本要求 3.1设备用途:该设备主要用于3-25mm碳钢、合金钢板和铝合金3-20mm的垂直切割下料和自动坡口切割。 3.2基本要求: 3.2.1机床有效切割范围:4000×10000mm,两套精细等离子加回转坡口割炬。其配置的离子切割电源应适合3-25mm碳钢、合金板的切割及开坡口,确保最佳的切割质量。* 3.2.2 机床的设计制造应执行国家和行业相关标准,制造单位需通过IS09001质量认证。设备具有足够的静态、动态、热态刚度和精度;保证系统具有良好和可靠的动态品质。 3.3.3 要求设备生产制造符合国际相关安全认证和有关标准(如CE,ASME,NBBI,U3等),
正常生产作业中,确保不对操作人员造成人身伤害,噪声、粉尘和烟气的排放要求达到中国环保要求。 3.3.4 所生产或采用的机械、液压、电子、电气、仪表组件等,均符合ISO颁布有关标准,计量单位采用公制或英制,并符合国际单位(SI)标准。 3.3.5 机床使用、维修方便,售后服务优良,能快速的对用户的故障问题做出反应,必须能在48小时内(2个工作日)到现场处理问题。 四、供货范围: 4.1设备供货范围: 数控精细氧离子切割机。包括:主机、配套辅机、控制系统等(具体见下表4.1),以及在本技术要求中未提及,但为确保该设备正常、稳定、长期、安全、可靠运行所必须的其他配套设施。 4.1 供货范围表
数控等离子下料切割工艺
目录 1 适用范围 (1) 2 引用标准 (1) 3 术语和定义 (1) 4 施工准备 (1) 5 人员要求 (1) 6 安全要求 (2) 7 设计要求 (2) 8 工艺要求 (3) 9 工艺流程 (5) 9.1 钢板吊运上台 (5) 9.2 核对信息 (5) 9.3 外观检查 (6) 9.4 数控切割 (6) 9.5 号料 (6) 9.6 分类码放 (6) 9.7 完工处理 (7) 10 标准作业周期 (7) 11 参考资料 (7) 附件1 (8)
1 适用范围 本工艺规定了数控等离子切割机开工前的作业准备、人员要求、工艺要求、精度控制方法及自检项目等内容。 本工艺适用于船厂钢板的干式等离子数控下料切割工作,其它数控切割机的钢板切割,以及铝合金板材等材质的数控切割工作也可参照使用。 2 引用标准 CB/T 4000-2005 中国造船质量标准 3 术语和定义 等离子弧切割:利用高温等离子弧的热量使工件切口处的金属局部融化,并借助高速等离子束排除熔融金属以形成切口的一种加工方法; 4 施工准备 4.1 工具设备 4.1.1 盒尺、盘尺等测量工具; 4.1.2 撬棍、记号笔等定位、号料工具; 4.1.3 手持切割、打磨工具; 4.1.4 U盘等数据存储工具。 4.2 技术准备 4.2.1 根据生产计划,提前向设计所拷贝数切程序,准备数切小样及数切套图,并检查数切小样及数切套图是否一致,如有差别,及时向设计反馈进行确认修改,检查无误后,将数切套图裁减为单板数切小样,分发到号料人员,同时将数切程序拷贝到各数切机; 4.2.2 确保数切机安全可靠运行,切割前重点检查数切机精度校验记录表(附件1),确保数切机具有可靠的精度保障; 4.2.3 根据生产计划,切割主管人员提前到板材发放处进行登记,并由板材发放人员检查待切割板材准备情况,如有缺漏,立即向上工序反馈,如存在板材代用情况,切割主管必须在钢板预处理后,及时将代用信息书写在钢板上,要求清晰、易见; 4.2.4 确保切割平台安全可靠,无废料等杂物,同时保证数切机气压、电源正常可靠。 5 人员要求 5.1 施工人员应接受过数切机操作、保养培训,并能够熟练使用; 5.2 施工人员应熟知本工艺,或在熟知本工艺的人员带领下施工;
数控等离子切割机如何操作
数控等离子切割机如何操作 数控等离子切割机操作规程: 一、等离子切割机的开机、关机:操作人员每天按照以下开关机的顺序进行操作: (1)启动空压机、空气干燥机; (2)启动机床控制柜; (3)启动等离子电源; (4)设置好所有参数后启动程序进行切割。首先要调节钢板和轨道的平行,再根据板材的厚度来选择割嘴的型号,切割速度和穿孔时间或者调节等离子电源的电流的大小,数控火焰切割机预热时,要避免板材上有太多的铁锈,它会影响数控火焰切割机的预热时间和切割效率。 数控等离子切割机时,不要将等离子电源的电流调节的过大,它会影响等离子割嘴和电极的使用寿命。然后要注意割枪和板材之间是否垂直,避免切割出来的工件断面有斜度,从而影响加工质量。数控切割机工作时,如果出现异常应马上暂停工作或者按下紧急停止开关,但要避免去移动机器和板材。 (5)工作完成后,关闭所有电源、气源。 然而,对于一个新手来说如何快速提高数控等离子切割机的操作水平呢? 洛阳博塔重工(专做数控等离子切割机多年)建议,作为一个新手可以这样来提高自己的操作水平: 第一,操作者需对操作的数控机床有一个全面的了解。了解机床的机械结构:要了解机床的机械构造组成;要掌握机床的轴系分布;更要牢牢地掌握机床各个数控轴的正负方向;要掌握机床的各部件的功能和使用;另外要掌握机床各辅助单元的工作原理和功能,以及机床各个安全门锁的工作原理、功能和使用方法。 第二,要熟练掌握控制数控机床的手动或者自动操作,熟练掌握控制机床的各数控轴的移动。操作者必须达到熟能生巧的境界,那么才能在任何情况下都能做到收放自如。 第三,要熟练掌握程序编辑,各个工序的参数补偿和刀具或者砂轮的直径和长度的补偿。首先经过培训掌握你所要操作数控机床的编程语言,编程方法和各参数补偿方法。在通过仿真软件进行加工,注意在模拟过程中所有参数都必须正确输入。另外,操作者需要特注意:仿真加工只是理论上的一个结果,并不代表机床在实际切削加工过程中就不会发生碰撞,也不代表就能加工出合格的产品。 第四,实际加工过程中的加工技巧,认真做好准备工作。先将图纸读懂,确认要加工工件的位置,确认要加工工件部位的精度公差,然后编辑加工程序。
kuka机器人学习报告
kuka机器人学习报告 篇一:工业机器人报告 工业机器人报告 在工业铝深加工可以大幅度增加产值的大势所趋下,集团成立了工业铝深加工分公司。深加工分公司的一个重要的深加工项目就是车体轨道车辆铝型材焊接。为了保证焊接质量,目前国内各大型工业铝型材生产企业深加工工厂都使用自动焊接机器人生产线进行车体轨道车辆铝型材焊接。 一、工业机器人历史 日本是当今的工业机器人王国,既是工业机器人的最大制造国也是最大消费国。但实际上工业机器人的诞生地是美国。美国人英格伯格和德奥尔制造出了世界上第一台工业机器人,他们发现可以让机器人去代替工人一些简单重复的劳动,而且不需要报酬和休息,任劳任怨。接着他们两人合办了世界上第一家机器人制造工厂,生产unimate工业机器人。美国是工业机器人的诞生地,基础雄厚,技术先进。现今美国有着一批具有国际影响力的工业机器人供应商,像Adept Technologe、American Robot、Emersom Industrial Automation等。德国工业机器人的数量占世界第三,仅次于日本和美国,其智能机器人的研究和应用在世界上处于领先地位。目前在普及第一代工业机器人的基础上,第二代工业机器人经推广应用成为主流安装机型,而第三代智能机器人
已占有一定比重并成为发展的方向。世界上的机器人供应商分为日系和欧系。瑞典的ABB公司是世界上最大机器人制造公司之一。1974年研发了世界上第一台全电控式工业机器人IRB6,主要应用于工 件的取放和物料搬运。1975年生产出第一台焊接机器人。到1980年兼并Trallfa喷漆机器人公司后,其机器人产品趋于完备。ABB公司制造的工业机器人广泛应用在焊接、装配铸造、密封涂胶、材料处理、包装、喷漆、水切割等领域。德国的KUKA Roboter Gmbh公司是世界上几家顶级工业机器人制造商之一。1973年研制开发了KUKA的第一台工业机器人。年产量达到一万台左右。所生产的机器人广泛应用在仪器、汽车、航天、食品、制药、医学、铸造、塑料等工业,主要用于材料处理、机床装备、包装、堆垛、焊接、表面休整等领域。意大利COMAU公司从1978年开始研制和生产工业机器人,至今已有30多年的历史。其机器人产品包括Smart 系列多功能机器人和MASK系列龙门焊接机器人。广泛应用于汽车制造、铸造、家具、食品、化工、航天、印刷等领域。(The Comau Smart NS1)日系是工业机器人制造的主要派系,其代表有FANUC、安川、川崎、OTC、松下、不二越等国际知名公司。 二、焊接机器人介绍 焊接机器人是从事焊接(包括切割与喷涂)的工业机器
常用等离子切割方法及其选用
常用等离子切割方法及其选用 不锈钢、铝和碳钢为压力容器的常用材料,其下料方法有很多种,等离子切割以其高 效、应用 范围广、切割面光洁、热变形小及适合加工各种形状等特点,成为最常用的下料方 法,在压力容器的制造中起着重要的作用。 由于等离子切割是以工作气体作为导电介质, 携带热量、熔化加工金属并吹除切口中 的熔融 金属来达到切割目的的,因此不同的工作气体对等离子的切割特性、质量、速度等方 面都有明显的影响。下面介绍几种常用等离子切割方法及其工艺特性和切割不同材料时等离 子切割方法选用。 1常用等离子切割方法及其工艺特性 1.1等离子空气切割法 等离子空气切割法以干燥的压缩空气作为加工气体, 主要用于切割碳钢,也可用于切 割不锈钢和铝。由于空气主要由氮气和氧气组成,切割碳钢时,切口中氧与铁的放热反应提 供了附加的热量,同时生成表面张力低、流动性好的 FeO 熔渣,改善了切口中熔融金属的流 动性,因此不但切割速度较快,而且切割面较光洁,切口下缘基本不粘渣,切割面斜角较小。 切割不锈钢和铝时,氧与不锈钢中的铬和铝起反应,其切割面较粗糙,一般对切割表面质量 要求较高时不采用这种加工方法。 等离子空气切割法主要存在以下缺点: (1) 切割面上附有氮化层,焊接时焊缝中会产生气孔,因此用于焊接的切割边,需用 砂轮打 磨,去除氮化层。 (2) 由于存在氧化作用,电极和喷嘴易损耗,使用寿命较短。 由于压缩空气的成本较低,这种切割方法在大批量的非焊接碳钢板的切割中使用较为 广泛。 其不同电流强度下,常用板厚和切割速度之间的关系如图 1所示。 1 . 2等离子氧气切割法 til ~_4处 SS ? =>?
工业机器人技术课程总结()
工业机器人技术课程总结 任课: 班级: 学号: 姓名: 之前在工厂实习见识和操作过很多工业机器人,有焊接机器人,涂装机器人,总装机器人等,但是学习了盖老师教授的工业机器人课程,才真正算是进入了工业机器人的理论世界学习机器人的相关知识。以下是课程总结。 一、第一章主要是对机器人的概述,从机器人的功能和应用、机器人的机构以及机器人的规格全面呈现学习机器人的框架。 研制机器人的最初目的是为了帮助人们摆脱繁重劳动或简单的重复劳动,以及替代人到有辐射等危险环境中进行作业,因此机器人最早在汽车制造业和核工业领域得以应用。随着机器人技术的不断发展,工业领域的焊接、喷漆、搬运、装配、铸造等场合,己经开始大量使用机器人。另外在军事、海洋探测、航天、医疗、农业、林业甚到服务娱乐行业,也都开始使用机器人。本书主要介绍工业机器人,对譬如军用机器人等涉及不多。 机器人的机构方面,主要介绍了操作臂的工作空间形式、手腕、手爪、和闭链结构操作臂。工作空间形式常见的有直角坐标式机器人、圆柱坐标式机器人、球(极)坐标式机器人、SCARA机器人以及关节式机器人。手腕的形式也可分为二自由度球形手腕、三轴垂直相交的手腕以及连续转动手腕。同时手爪也可分为夹持式手爪、多关节多指手爪、顺应手爪。机器人的其他规格主要介绍驱动方式、自动插补放大、坐标轴数、工作空间、承载能力、速度和循环时间、定位基准和重复性以及机器人的运行环境。第一章的内容主要是对机器人各个方面有个简单的介绍使机器人更形象化和具体化。工业机器人定义为一种拟人手臂、手腕和手功能的机电一体化装置,能将对象或工具按照空间位置姿态的要求移动,从而完成某一生产的作业要求。工业机械应用:主要代替人从事危险、有害、有毒、低温和高热等恶劣环境中的工作;代替人完成繁重、单调重复劳动。它带来的好处:减少劳动力费用提高生产率改进产品质量增加制造过程柔性减少材料浪费控制和加快库存的周转消除了危险和恶劣的劳动岗位。机器人的直角坐标型:结构简单;定位精度高;空间利用率低;操作范围小;
常用等离子切割方法及其工艺特性(精)
常用等离子切割方法及其工艺特性 1. 1 等离子空气切割法 等离子空气切割法以干燥的压缩空气作为加工气体,主要用于切割碳钢,也可用于切割不锈 钢和铝。由于空气主要由氮气和氧气组成,切割碳钢时,切口中的氧与铁的放热反应提供了附加的 热量,同时生成表面张力低、流动性好的FeO 熔渣,改善了切口中熔融金属的流动性,因此不但切割速度较快,而且切割面较光洁,切口下缘基本不粘渣,切割面斜角较小。切割不锈钢和铝时,氧与不锈钢中的铬和铝起反应,其切割面较粗糙,一般对切割表面质量要求较高时不采用这种加工方 法。 等离子空气切割法主要存在如下缺点: a . 切割面上附有氮化层,焊接时焊缝中会产生气孔。因此用于焊接的切割边,需用砂轮打磨,去除氮化层。 b. 由于存在氧化作用,电极和喷嘴易损耗, 使用寿命较短。 由于压缩空气的成本较低,这种切割方法在大批量的非焊接碳钢板的切割中使用较为广泛。不同 电流强度下,等离子空气切割碳钢时常用板厚和切割速度之间的关系如图 1 所示。 图1 等离子空气切割碳钢 1. 2 等离子氧气切割法 等离子氧气切割法以氧气作为工作气体,主要用于切割碳钢、铝。氧的离解热高、携热性好,粒子复合时的放热量大,投入切割的热量多,因此可获得较高的切割速度。在加工碳钢时,因切割过程中的铁2氧反应提供了大量的附加热量,促进了切割速度的进一步提高。与等离子空气切割法相比,等离子氧气切割法在切割碳钢时有以下优点: a . 切割速度更快; b. 切割面更光洁,呈金属光泽,尤其是无氮化层,切割后可直接用于焊接; c. 切口下缘不粘渣; d. 切割变形小,精度高。 等离子氧气切割法也存在如下缺点: a . 因氧化作用强,电极损耗更快,使用寿命短; b. 切割面斜角较大。 不同电流强度下,等离子氧气切割碳钢和铝时常用板厚和切割速度之间的关系如图 2 和图3所示。
数控等离子切割机安全操作规程
数控等离子切割机安全操作 规程 Through the process agreement to achieve a unified action policy for different people, so as to coordinate action, reduce blindness, and make the work orderly. 简介:该规程资料适用于公司或组织通过合理化地制定计划,达成上下级或不同的人员之间形成统一的行动方针,明确执行目标,工作内容,执行方式,执行进度,从而使整体计划目标统一,行动协调,过程有条不紊。文档可直接下载或修改,使用时请详细阅读内容。 1.操作人员应遵守一般焊工安全操作规程。按规定穿戴好劳动防护用品。 2.操作人员必须经专门安全技术培训,方能上岗操作。 3.设备附近禁止存放易燃易爆物品,并应备有消防器材。 4.严禁在切割机导轨、工作面放置物品。不得在上面敲打、校直和修整工件。 5.新工件程序输入后,应先试运行,确认无误后再投入运行。
6.开机前应检查导轨、齿条及床身。检查气路系统有泄漏,排放储气筒、油水分离器内积水和杂质。检查消耗品及割炬防撞碰装置。 7.开机后应手动低速X、Y方向开动机床,检查确认有无异常情况。 8.手动升降割炬,检查动作有无异常。 9.起动等离子发生器,根据材料厚度调整气压。 10.切割过程中,观察调高系统及除尘系统工作是否正常,有异常应立即停机处理,排除故障。 11.工作时,操作人员不得离开岗位,注意观察机床运行情况,以免切割机走出有效行程范围或两台发生碰撞造成事故。 这里填写您的企业名字 Name of an enterprise
机器人创新设计课程总结
机器人创新设计课程总结 机器人创新设计课程总结 苏登自动化1509 学号20213800 记得当初选择机器人创新设计这门课程有很多原因,其一是自己喜欢机械结构,对和机械自动化有关的课题感兴趣,还有一个原因是刚刚看完BAYMAX这部好评如潮的电影,被其中各色各样的机器人所打动。在选择这门课程时心里还是有一些犹豫,担心自己在这方面毫无基础,难以跟上课程进度,再者担心考试太难,拿不到好成绩。然而事实证明,我当初选择这门选修课的决定是正确的,期间不但接触到了最新的机器人概念和进展,还认识到了专业的老师,很多有想法有能力的朋友,最重要的是我完全是因为兴趣而不是为了完成修学分的任务,因此哪怕期间有所困难,哪怕偶尔感觉枯燥,我都觉得没有白费时间。 如果说这门课程给我留下的最深的印象是什么,我的总结是:实践,参与。机器人不是纸上谈兵的东西,机器人从开端到如今的繁荣,都是一个个实验,一个个失败铸造的结果。对此,我对我们的指导老师李海龙老师深感敬佩。短短半个学期的时间,不多的上课机会,李海龙老师拿出两节课的时间给我们做课堂展示,又拿出两节课的时间给我们组装,展示机器人,更不用说课下我们在网上查找资料,为机器人编程这类直接接触机器人
的时间。很多人把选修课看作水课,我想说的是,咋们的机器人创新设计不是水课。 在课堂展示的PPT中,我负责的是智能机器人这一部分。期间花了很多的时间上网查找资料。在我以往的印象中,真正智能的机器人应该可以具有自我学习的功能,而不仅仅是依靠事先储存的数据。比如可以自己根据实际问题,根据发生过的事件自动储存记忆更新数据库。在我整理完智能机器人这一部分的资料后,我发现现在的机器人技术尚未达到这一高度,机器人做出的判断也仅仅只是基于现有的数据,无法自己学习,更不用说产生灵感之类的智慧了。舍友问我:“你上网查这些资料有什么意义?”,可能这些东西不会对我产生直接的影响,但是作为自动化的学生,在以后系统地接触到机器人的时候,甚至自己有点小小的成绩的时候,我可以在心里提醒自己:我离真正的智能机器人还差的很远。正如乔布斯所说,当初我在大学选修书法课,我看不到任何的直接作用,但是若干年后,我把在书法上的知识运用到了苹果电脑里,如果当初我没有选择书法课,那么现在你们的电脑里就不会有如此美丽的字体。为自己的兴趣,为团队的成果而投入地做一件事情,本来就非常值得。 认清团队的力量,这是我在机器人创新设计课程上的第二个收获。在最后的机器人组装上,没有专门的讲解,仅仅是一百四十多页的图纸。然而在这种情况下,我们的组长曹旭分工明确,组装的工作进行的井井有条,期间有各种错误,盲区,但是我们
等离子切割工艺及技术
等离子切割工艺及技术-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
等离子切割 等离子弧切割是利用高温等离子电弧的热量使工件切口处的金属局部熔化(和蒸发),并借助高速等离子的动量排除熔融金属以形成切口的一种加工方法。等离子切割配合不同的工作气体可以切割各种氧气切割难以切割的金属,尤其是对于有色金属(不锈钢、铝、铜、钛、镍)切割效果更佳;其主要优点在于切割厚度不大的金属的时候,等离子切割速度快,尤其在切割普通碳素钢薄板时,速度可达氧切割法的5~6倍、切割面光洁、热变形小、几乎没有热影响区! 等离子切割发展到现在,可采用的工作气体(工作气体是等离子弧的导电介质,又是携热体,同时还要排除切口中的熔融金属)对等离子弧的切割特性以及切割质量、速度都有明显的影响。常用的等离子弧工作气体有氩、氢、氮、氧、空气、水蒸气以及某些混合气体。等离子切割机广泛运用于汽车、机车、压力容器、化工机械、核工业、通用机械、工程机械、钢结构等各行各业。 一、等离子弧切割工艺参数 各种等离子弧切割工艺参数,直接影响切割过程的稳定性、切割质量和效果。主要切割规范简述如下: 1.空载电压和弧柱电压 等离子切割电源,必须具有足够高的空载电压,才能容易引弧和使等离子弧稳定燃烧。空载电压一般为120-600V,而弧柱电压一般为
空载电压的一半。提高弧柱电压,能明显地增加等离子弧的功率,因而能提高切割速度和切割更大厚度的金属板材。弧柱电压往往通过调节气体流量和加大电极内缩量来达到,但弧柱电压不能超过空载电压的65%,否则会使等离子弧不稳定。 2.切割电流 增加切割电流同样能提高等离子弧的功率,但它受到最大允许电流的限制,否则会使等离子弧柱变粗、割缝宽度增加、电极寿命下降。 3.气体流量 增加气体流量既能提高弧柱电压,又能增强对弧柱的压缩作用而使等离子弧能量更加集中、喷射力更强,因而可提高切割速度和质量。但气体流量过大,反而会使弧柱变短,损失热量增加,使切割能力减弱,直至使切割过程不能正常进行。 4.电极内缩量 所谓内缩量是指电极到割嘴端面的距离,合适的距离可以使电弧在割嘴内得到良好的压缩,获得能量集中、温度高的等离子弧而进行有效的切割。距离过大或过小,会使电极严重烧损、割嘴烧坏和切割能力下降。内缩量一般取8-11mm。 5.割嘴高度 割嘴高度是指割嘴端面至被割工件表面的距离。该距离一般为4~10mm。它与电极内缩量一样,距离要合适才能充分发挥等离子弧的切割效率,否则会使切割效率和切割质量下降或使割嘴烧坏。
数控等离子切割机安全操作规程(新编版)
The prerequisite for vigorously developing our productivity is that we must be responsible for the safety of our company and our own lives. (安全管理) 单位:___________________ 姓名:___________________ 日期:___________________ 数控等离子切割机安全操作规程 (新编版)
数控等离子切割机安全操作规程(新编版)导语:建立和健全我们的现代企业制度,是指引我们生产劳动的方向。而大力发展我们生产力的前提,是我们必须对我们企业和我们自己的生命安全负责。可用于实体印刷或电子存档(使用前请详细阅读条款)。 1.操作人员应遵守一般焊工安全操作规程。按规定穿戴好劳动防护用品。 2.操作人员必须经专门安全技术培训,方能上岗操作。 3.设备附近禁止存放易燃易爆物品,并应备有消防器材。 4.严禁在切割机导轨、工作面放置物品。不得在上面敲打、校直和修整工件。 5.新工件程序输入后,应先试运行,确认无误后再投入运行。 6.开机前应检查导轨、齿条及床身。检查气路系统有泄漏,排放储气筒、油水分离器内积水和杂质。检查消耗品及割炬防撞碰装置。 7.开机后应手动低速X、Y方向开动机床,检查确认有无异常情况。 8.手动升降割炬,检查动作有无异常。 9.起动等离子发生器,根据材料厚度调整气压。 10.切割过程中,观察调高系统及除尘系统工作是否正常,有异
常应立即停机处理,排除故障。 11.工作时,操作人员不得离开岗位,注意观察机床运行情况,以免切割机走出有效行程范围或两台发生碰撞造成事故。 XX设计有限公司 Your Name Design Co., Ltd.
数控等离子切割机操作规程
数控等离子切割机安全操作规程 1.操作人员应遵守一般焊工安全操作规程。按规定穿戴好劳动防护用品。 2.操作人员必须经专门安全技术培训,方能上岗操作。 3.设备附近禁止存放易燃易爆物品,并应备有消防器材。 4.严禁在切割机导轨、工作面放置物品。不得在上面敲打、校直和修整工件。 5.新工件程序输入后,应先试运行,确认无误后再投入运行。 6.开机前应检查导轨、齿条及床身。检查气路系统有泄漏,排放储气筒、油水分离器内积水和杂质。检查消耗品及割炬防撞碰装置。 7.开机后应手动低速X、Y方向开动机床,检查确认有无异常情况。 8.手动升降割炬,检查动作有无异常。 9.起动等离子发生器,根据材料厚度调整气压。 10.切割过程中,观察调高系统及除尘系统工作是否正常,有异常应立即停机处理,排除故障。 11.工作时,操作人员不得离开岗位,注意观察机床运行情况,以免切割机走出有效行程范围或两台发生碰撞造成事故。 一、等离子切割机的开机、关机: 操作人员每天按照以下开关机的顺序进行操作: (1)启动空压机、空气干燥机; (2)启动机床控制柜;
(3)启动等离子电源; (4)设置好所有参数后启动程序进行切割。 (5)工作完成后,关闭所有电源、气源。 二、等离子切割机的工作流程: (1)用AUTOCAD制图或用已有Solidworks文件直接转换为DXF格式;(2)将DXF格式的零件图导入FastCAM中进行套料、转换程序,为方便程序的调用及管理,将程序名称保存为该零件的图号; (3)将转化好的程序用U盘拷入机床的控制柜上。 (4)根据所选择程序的材料及厚度,设置工艺参数; (5)调整好割枪在板材上的位置,启动程序进行切割; (6)结束切割,下料、清渣。 三、工艺参数的设定与调整: 所有工艺参数都依据说明书上的切割参数表来进行设定,改变材料及板材厚度时所有参数必须重新进行设定。 在等离子电源上调整的参数有: (1)电流:手动旋扭给定 (2)PG1引弧气气压及流量: (3)PG2切割气气压及流量: (4)WG1涡流气气压及流量: (5)WG2涡流气气压及流量: (6)板厚档位:共3个档位,根据参数表设定。 在机床控制柜上调整的参数有: