基于Stateflow技术多模态飞行控制律仿真

第25卷第4期杭州电子科技大学学报V ol.25,N o.4 2005年8月Journal of Hangzh ou Dianzi University Aug.2005
基于Stateflow技术多模态飞行控制律仿真
吴了泥,黄一敏
(南京航空航天大学自动化学院,江苏南京210016)
摘要:S tateflow是有限状态机原理的图形实现,能在仿真过程中进行连续状态间的切换。无人机飞
行过程正是多模态飞行控制律的切换过程,是由飞行任务驱动的有限状态机系统。该文描述了如
何用S tateflow实现控制模态间的切换,按无人机自主导航的控制逻辑建立了S tateflow仿真模型。
仿真结果说明采用S tateflow实现多模态飞行控制律仿真的有效性。
关键词:多模态;飞行控制;自主导航;无人机
中图分类号:V249 文献标识码:A 文章编号:1001-9146(2005)04-0034-04
0 引 言
飞行控制律通常是在M AT LAB/Simulink下进行设计的,利用风洞数据建立S-function的非线性模型。按飞行包线选取平衡状态,配平、线性化后分析对象特性进而确定控制结构设计控制参数。最后进行非线性仿真,在几个有代表性的状态验证设计好的各个控制模态(Simulink方框图)。至于全包线的仿真曲线,要把控制律改写成C代码,装入飞控计算机进行实物仿真时才能看到。能在Simulink环境下做全包线的仿真验证,有助于在设计初期减少错误,优化控制和导航方法,对控制律设计具有非常重要的意义。
1 Stateflow介绍
1.1 有限状态机原理
具有有限组模式或是状态的系统称为有限状态机(FS M:Finite State Machine)。FS M系统采用事件驱动机制,当特定事件发生时,系统从A状态转换到B状态。Stateflow是有限状态机的图形实现,它以可视的状态(State)和转移(Transition)描述FS M系统,用事件(Events)结合转移条件(C ondition)控制系统流程。
1.2 Stateflow的元素
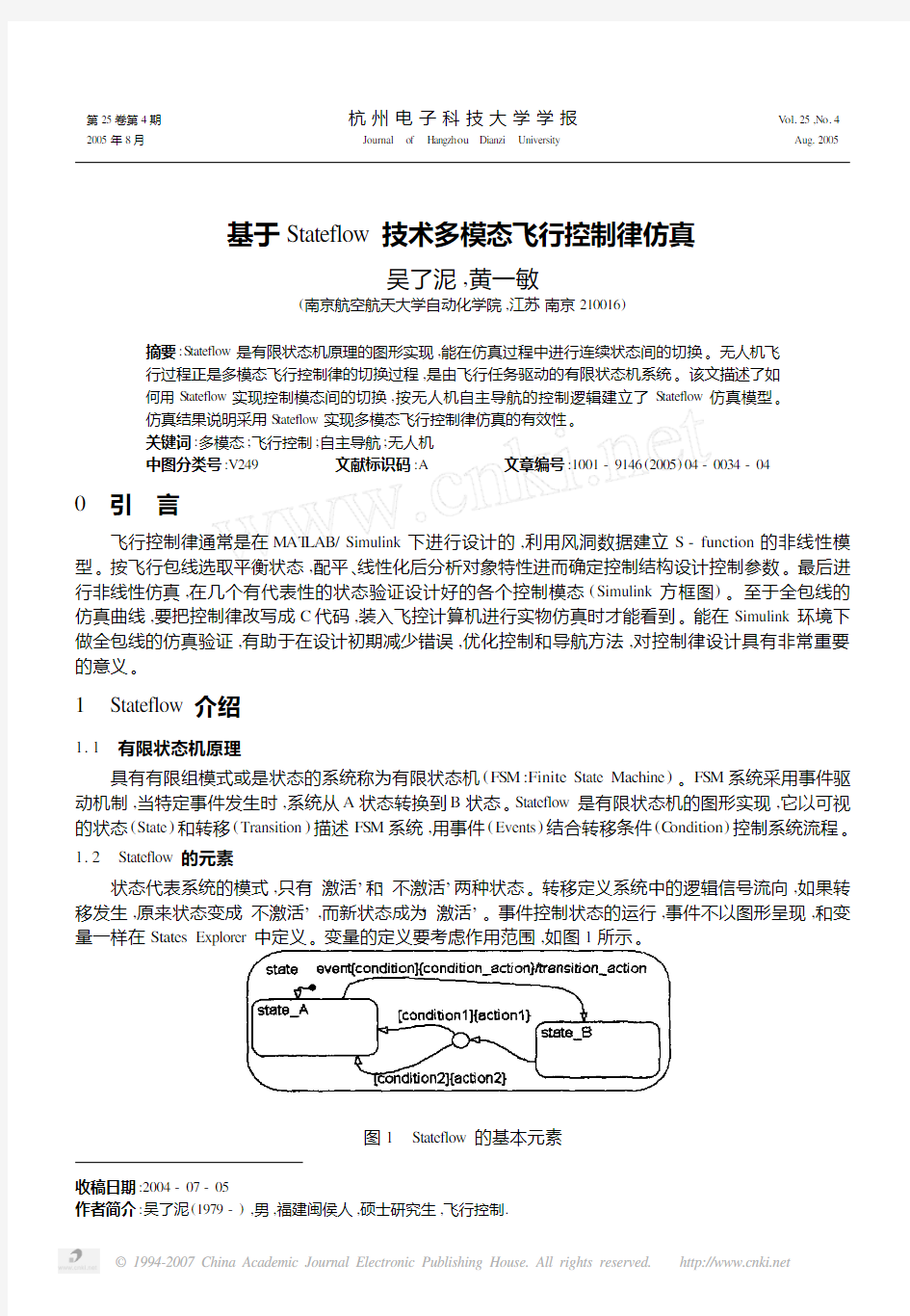
状态代表系统的模式,只有‘激活’和‘不激活’两种状态。转移定义系统中的逻辑信号流向,如果转移发生,原来状态变成‘不激活’,而新状态成为‘激活’。事件控制状态的运行,事件不以图形呈现,和变量一样在States Explorer中定义。变量的定义要考虑作用范围,如图1所示。
图1 Stateflow的基本元素
收稿日期:2004-07-05
作者简介:吴了泥(1979-),男,福建闽侯人,硕士研究生,飞行控制.
节点也是基本元素,利用转移和节点(Node )就可以很方便的描述计算机高级语言中的循环语句和条件转移语句,设计开发出复杂的监控逻辑。
1.3 Stateflow 和Simulink 的结合
Stateflow 可以通过定义输入输出和Simulink 交互。输入输出有数据也有事件。每个Stateflow 模块都属于子封装的Simulink 模块。仿真执行时Stateflow 机制把流程图转成Simulink 的内部描述S -func 2tion 。所以Stateflow 生成的逻辑可以直接嵌入到Simulink 模型下,两者是无缝结合的。这样就能在仿真过程用事件驱动连续行为间的切换。
2 飞行模态采用Stateflow 进行切换
飞行过程是由有限的飞行模态组成的。本文仿真使用的某型无人机自主导航过程由5个飞行模态构成,纵向有爬升、下滑、平飞,横侧向有航向跟踪、航迹控制。用状态代表各飞行模态,加上条件判断状态间的转移,就是Stateflow 对自主导航过程的有限状态机系统描述
。
可以就上述飞行模态设计纵向状态Long 和横侧向状态Late 。纵向中设置爬升(Climb )、平飞(Lev 2el )、下滑(Dive )3个子状态,横侧向设置航向跟踪(Psi-tack )和航迹控制(Way -track )2个子状态。Stateflow 中的状态用方框表示可以体现层次关系,并行关系,还能有历史记录功能。导航过程纵向和横侧向同时控制,所以Late 和Long 是并行状态,而内部子状态是互斥状态,如图2所示。
图2 模型状态层次图
进行单控制模态仿真验证时,都已把各控制模态设计成Simulink 上的子封装(Subsystem )执行模块,下一步是把Stateflow 对应的飞行状态映射到外部的Simulink 的控制模块。Stateflow 状态框Active 时对应的外部Simulink 控制模块执行,Inactive 时对应的Simulink 模块不执行,这样转移执行时就会引起外部控制模块的切换。
为实现映射关系,可采用两种方案:(1)在执行子模块内放触发模块,飞行状态输出触发函数直接触发对应的控制模块进行计算;(2)执行模块同时计算,使用开关模块来选择使用哪个模块的输出,State 2flow 输出一整型数值作为开关量的值。本文采用触发器进行横侧向的切换,纵向用开关切换,如图3所示。
除了爬升和下滑共用姿态控制模态,其他飞行模态都与控制模态一一对应。爬升和下滑切换只需改变控制指令俯仰给定量即可。注意,由于高度积分模块的存在平飞控制的执行模块不能用触发器。而且在爬升或下滑改平飞时必须把积分模块先清零(可在转入平飞控制时输出个触发事件RESET ),如图4所示。
Stateflow 每个状态有4个标志值entry 、during 、exit 和on ,分别表示进入状态、状态保持、退出状态、及发生一事件时相应的行为。可以在行为中为控制指令赋值,或是触发切换事件。
3 自主导航的仿真实现
建立飞行模态并实现了模态间的切换,Stateflow 模型就剩下对导航逻辑的描述。自主导航模式下,无人机在横侧向的航迹控制上,以及在纵向高度剖面上都实现自动控制。仿真的设计目标是采用G PS 导航(经纬度信号由非线性模型直接解算给出),按照航路文件。
导航过程,横侧向上不断计算待飞距、偏航角、侧偏距。待飞距判断进入下一个航段的时机,进入新53第4期 吴了泥等:基于Stateflow 技术多模态飞行控制律仿真
图3
和Simulink 的连接 图4 纵向导航模型
航段时先用航向控制校正偏航角,当偏航角小于10deg ,进行航迹控制(使用偏航角和侧偏距),直到下一个航段,是个循环过程,如图5所示。纵向状态用航段高度与飞行高度差判断,是个条件转移结构,如图6所示。
图5 导航横侧向控制逻辑 图6 自主导航纵向控制逻辑
Stateflow 的图形化设计方法可以很方便的描述横侧向和纵向的控制逻辑,如图7、图4所示。主要的工作是书写转移标志,转移上的通用标志是:
event[condition ]{condition-action}/transition-action
代表:事件-条件-条件满足的行为-转移行为。条件可以是判断变量和外部输入的连续信号,与事件并用决定转移是否成立。若转移未指明事件的名称,只要满足条件,转移就会执行。当转移成立时,执行转移行为。行为的种类有数值表达式,函数调用及事件触发。注意应该使用标准C 语言格式书写数值表达式。另外,Statefow 可以链接编译.C 文件,C 代码的全局变量和全局函数(用extern 声明)在Stateflow 流程图中可直接使用。导航模型中读取航路文件和计算待飞距、偏航角及侧偏距的函数就是直接用C 代码实现的。最后仿真结果如图8-10所示。
4 结束语
仿真结果表明利用Stateflow 完全可以实现多模态飞行控制的仿真。对控制律的设计提供了有力工具。就本文的工作来说还有许多要完善的:模态切换中还应该有软化过程;可以考虑用C 语言改写高度积分模块,这样平飞执行模块也能使用触发驱动;还可以添加手动开关模块(Manual S witch )让Stateflow 模型实时处理界面的鼠标点击,实现遥控指令的验证。
63
杭州电子科技大学学报 2005年
图7 横向导航模型
图8 航迹跟踪曲线
图9 高度跟踪曲线 图10 俯仰角保持曲线
参考文献
[1] G Ham on.J Rushby.An Operational semantics for S tateflow[C].Fundamental Approaches to S oftware Engineering :7th Interna 2
tional C on ference (FASE ),v olume 2984of Lecture N otes in C omputer Science ,2004,229-243.
[2] A T iwari .F ormal Semantics and analysis methods for S imulink S tateflow M odels[DB/O L ].T echnical report ,SRI International ,
http ://w w w.csl.sri.con/users/tiwari/stateflow.html ,2002-02-01.
[3] S K owalewski ,O S tursberg ,M Fritz.A Case S tudy in T ool -Aided Analysis of Discretely C ontrolled C ontinuous Systems :The
T w o T anks Problem[C].Hybrid Systems V ,1999,163.
[4] Harel ,David.S tatecharts :A Visual F ormalism for C omplex Systems[J ].Science of C omputer Programming 8,1987,24(3):231
-274.
[5] The Mathw orks.S tateflow and S tateflow C oder ,User ’s G uide[M].Sept :2003.243-304.
[6] 孙春贞.无人机最简控制系统[D].南京航空航天硕士论文,2003,26-38.
Multi -Mode Simulation of UAV Flight Control B ased on Stateflow
WU Liao 2ni ,HUANG Yi 2min
(Nanjing University of Aeronautics and Astronautics ,College of Automation Engineer ,Nanjing Jiangsu 210016,China )
Abstract :Stateflow im plements a variant of the hierarchical finite state machine ,which makes it possible to switch continuous behaviors during a simulation.The process of flight is a task -dived FS M system with limited control m odes.In this paper ,the operation of switching between flight control m odes with stateflow is describled and the fi 2nite state machine Stateflow m odel is built according to autonom ous navigation logic.The simulation result indicates that multi -m ode simulation is effective for practical UAV project.
K ey w ords :multi -m ode ;flight control ;autonom ous navigation ;UAV
7
3第4期 吴了泥等:基于Stateflow 技术多模态飞行控制律仿真
飞行器控制系统设计
课程设计任务书 学生姓名: 李攀 专业班级: 自动化0804 指导教师: 谭思云 工作单位: 自动化学院 题 目: 飞行器控制系统设计 初始条件: 飞行器控制系统的开环传递函数为: ) 2.361(4000)(+= s s K s G 控制系统性能指标为调节时间s 008.0≤,单位斜坡输入的稳态误差000443.0≤,相角裕度大于85度。 要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) (1) 设计一个控制器,使系统满足上述性能指标; (2) 画出系统在校正前后的奈奎斯特曲线和波特图; (3) 用Matlab 画出上述每种情况的阶跃响应曲线,并根据曲线分析系统的动态性能指标; (4) 对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析计算的过程,给出响应曲线,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。 时间安排: (1) 课程设计任务书的布置,讲解 (一天) (2) 根据任务书的要求进行设计构思。(一天) (3) 熟悉MATLAB 中的相关工具(一天) (4) 系统设计与仿真分析。(四天) (5) 撰写说明书。 (两天) (6) 课程设计答辩(一天) 指导教师签名: 年 月 日 系主任(或责任教师)签名: 年 月 日
摘要 根据被控对象及给定的技术指标要求,设计自动控制系统,既要保证所设计的系统有良好的性能,满足给定技术指标的要求,还有考虑方案的可靠性和经济性。本说明书介绍了在给定的技术指标下,对飞行器控制系统的设计。为了达到给定要求,主要采用了串联之后—超前校正。 在对系统进行校正的时候,采用了基于波特图的串联之后—超前校正,对系统校正前后的性能作了分析和比较,并用MATLAB进行了绘图和仿真。对已校正系统的高频特性有要求时,采用频域法校正较其他方法更为方便。 关键词:飞行器控制系统校正 MATLAB
控制系统仿真与CAD 实验报告
《控制系统仿真与CAD》 实验课程报告
一、实验教学目标与基本要求 上机实验是本课程重要的实践教学环节。实验的目的不仅仅是验证理论知识,更重要的是通过上机加强学生的实验手段与实践技能,掌握应用 MATLAB/Simulink 求解控制问题的方法,培养学生分析问题、解决问题、应用知识的能力和创新精神,全面提高学生的综合素质。 通过对MATLAB/Simulink进行求解,基本掌握常见控制问题的求解方法与命令调用,更深入地认识和了解MATLAB语言的强大的计算功能与其在控制领域的应用优势。 上机实验最终以书面报告的形式提交,作为期末成绩的考核内容。 二、题目及解答 第一部分:MATLAB 必备基础知识、控制系统模型与转换、线性控制系统的计算机辅助分析 1. >>f=inline('[-x(2)-x(3);x(1)+a*x(2);b+(x(1)-c)*x(3)]','t','x','flag','a','b','c');[t,x]=ode45( f,[0,100],[0;0;0],[],0.2,0.2,5.7);plot3(x(:,1),x(:,2),x(:,3)),grid,figure,plot(x(:,1),x(:,2)), grid
2. >>y=@(x)x(1)^2-2*x(1)+x(2);ff=optimset;https://www.360docs.net/doc/0e1609656.html,rgeScale='off';ff.TolFun=1e-30;ff.Tol X=1e-15;ff.TolCon=1e-20;x0=[1;1;1];xm=[0;0;0];xM=[];A=[];B=[];Aeq=[];Beq=[];[ x,f,c,d]=fmincon(y,x0,A,B,Aeq,Beq,xm,xM,@wzhfc1,ff) Warning: Options LargeScale = 'off' and Algorithm = 'trust-region-reflective' conflict. Ignoring Algorithm and running active-set algorithm. To run trust-region-reflective, set LargeScale = 'on'. To run active-set without this warning, use Algorithm = 'active-set'. > In fmincon at 456 Local minimum possible. Constraints satisfied. fmincon stopped because the size of the current search direction is less than twice the selected value of the step size tolerance and constraints are satisfied to within the selected value of the constraint tolerance.
多轴运动控制器在转台控制系统中的应用
随着自动控制理论和数字计算机及其应用技术的不断发展,以计算机为基础的控制技术迅猛发展,被控对象规模更大,控制过程和规律也更加复杂和精密,控制方法也更加灵活多样[1]。在转台的控制系统中,除了用来产生输入信号的仿真机之外,计算机还扮演了控制器的角色。根据控制器的不同形式,计算机控制系统分为集中式、分布式、集散式三种类型,其中集散式控制器又分为PC机与单片机、PC机与PC机、PC机与嵌入式控制器三种形式。转台运动控制系统是转台设计中最为关键的部分,本课题中选用PC机与嵌入式控制器的形式,其中PC机采用性能稳定的IPC(工控机),嵌入式控制器选用美国DeltaTau公司的可编程多轴控制器PMAC,即IPC+PMAC。 1转台的基本结构与组成 由于各种民用、军用飞行器技术的快速发展,当今世界各国都十分重视半实物仿真技术的研究和应用,而三轴转台是半实物仿真的重要设备之一[2]。通常,三轴转台提供模拟飞行器飞行姿态角和为被试件提供测试条件的功能,以便验证全数字仿真的实验结果并进一步优化或改良飞行器设计方案。转台负载放在内框之上,由平板固定,内框、中框和外框均可绕其轴向做360°旋转运动,可以模拟飞行器的3个自由度的横滚、俯仰和航向运动。三轴转台由控制部分和机械部分组成,转台的控制部分由一个控制柜和一台IPC组成,转台机械结构由框架结构、动力源、支承结构、驱动方式、轴系结构、配重方式等组成。本课题中的转台采用UOO结构,外框架采用音叉形式(U型),其结构简单,转动惯量小,并可相应缩小转台总体尺寸;中框架和内框架采用封闭框形式(O型),易于实现整圈旋转。转台的3个轴系均采用精密机械轴承支撑,直流无刷电机驱动,运用海德汉增量式编码器进行速度、位置反馈,并在每轴运用滑环进行导线转接,可使框体做无限旋转运动。 2PMAC控制器简介 PMAC(Programmable Multi-Axis Controller)是美国Delta -Tau公司生产的系列运动控制器。使用Motorola的DSP56000系列芯片作为CPU,最多可实现8轴的伺服控 多轴运动控制器在转台控制系统中的应用 王海涌,张为玮,王卫 (北京航空航天大学宇航学院,北京100083) 摘要:提出了一种基于多轴运动控制器的转台控制系统的组成方案.给出了转台的基本组成,介绍了多轴运动控制卡功能及其硬软件的开放性。分析了控制系统的组成原理,详细介绍了控制系统总体设计方案和基本的硬件配置结构,以及此控制系统的软件设计方法和功能实现。通过此基于多轴运动控制卡的控制系统实现了转台的实时控制及伺服控制。 关键词:多轴运动控制器;转台;运动控制系统 中图分类号:TP271文献标识码:A Using PMAC in motion control system of turntable WANG Hai Yong,ZHANG Wei Wei,WANG Wei (School of Aerospace,Beijing University of Aeronautics and Astronautics,Beijing100083,China) Abstract:Three-axis turntable motion control system with PMAC(Programmable Multi-Axis Controller)is proposed.It intro-duces the design of turntable,and it introduces the functions and opening of the PMAC.This paper analyzes the basic theory of control system.It briefly introduces the overall design scheme and basic hardware configuration of the control system,and explains its software design method and function realization in detail.Through the control system the turntable achieves real-time control and servo control. Key words:PMAC;turntable;motion control system 97 《电子技术应用》2010年第3期
控制系统仿真
5.2设222(x,y,z)4y z f x x y z =+++,求函数f 在(0.5,0.5,0.5)附近的最小值。 解: >> fun=inline('x(1)+x(2)^2/(4*x(1))+x(3)^2/x(2)+2/x(3)','x'); >> x0=[0.5,0.5,0.5]; >> [x fval]=fminsearch(fun,x0) x = 0.5000 1.0000 1.0000 fval = 4.0000 → 函数f 在(0.5,0.5,0.5)附近的最小值为:4.0000 6.8求方程组1221x y z x y z x y z ++=??-+=??--=? 的解。 解: >> A=[1 1 1;1 -1 1;2 -1 -1]; >> b=[1;2;1]; >> B=[A,b]; >> rank(A),rank(B) ans = 3 ans = 3 >> X=A\b X = 0.6667 -0.5000 0.8333 → 方程组的解为:0.6667x =,=-0.5000y ,=0.8333z 6.11求函数3()sin t f t e t -=的拉普拉斯变换。 解: >> syms t; >> ft=exp(-3*t)*sin(t); >> Fs=laplace(ft) Fs = 1/((s + 3)^2 + 1) → 函数3()sin t f t e t -=的拉普拉斯变换为:21(s 3)1 ++
7.11单位负反馈系统的开环传递函数为 1000(s)(0.1s 1)(0.001s 1) G s =++ 应用Simulink 仿真系统构建其阶跃响应曲线。 解: 模型仿真图 1 单位阶跃响应曲线图 1 7.7用S 函数创建二阶系统0.20.40.2(t)y y y u =+=,0y y ==,()u t 为单位阶跃信号,使用Simulink 创建和仿真系统的模型。 解: function [sys,x0,str,ts] = sfun1(t,x,u,flag) switch flag, case 0 [sys,x0,str,ts]=mdlInitializeSizes; case 3 sys=mdlOutputs(t,x,u); case {1,2,4,9} sys=[]; end function [sys,x0,str,ts]=mdlInitializeSizes() sizes=simsizes;
《控制系统计算机仿真》实验指导书
实验一 Matlab使用方法和程序设计 一、实验目的 1、掌握Matlab软件使用的基本方法; 2、熟悉Matlab的数据表示、基本运算和程序控制语句 3、熟悉Matlab绘图命令及基本绘图控制 4、熟悉Matlab程序设计的基本方法 二、实验内容 1、帮助命令 使用help命令,查找sqrt(开方)函数的使用方法; 2、矩阵运算 (1)矩阵的乘法 已知A=[1 2;3 4]; B=[5 5;7 8]; 求A^2*B (2)矩阵除法 已知A=[1 2 3;4 5 6;7 8 9]; B=[1 0 0;0 2 0;0 0 3]; A\B,A/B (3)矩阵的转置及共轭转置 已知A=[5+i,2-i,1;6*i,4,9-i]; 求A.', A' (4)使用冒号选出指定元素 已知:A=[1 2 3;4 5 6;7 8 9]; 求A中第3列前2个元素;A中所有列第2,3行的元素; (5)方括号[] 用magic函数生成一个4阶魔术矩阵,删除该矩阵的第四列 3、多项式 (1)求多项式p(x) = x3 - 2x - 4的根 (2)已知A=[1.2 3 5 0.9;5 1.7 5 6;3 9 0 1;1 2 3 4] , 求矩阵A的特征多项式; 求特征多项式中未知数为20时的值; 4、基本绘图命令 (1)绘制余弦曲线y=cos(t),t∈[0,2π] (2)在同一坐标系中绘制余弦曲线y=cos(t-0.25)和正弦曲线y=sin(t-0.5),t∈[0,2π] 5、基本绘图控制 绘制[0,4π]区间上的x1=10sint曲线,并要求: (1)线形为点划线、颜色为红色、数据点标记为加号; (2)坐标轴控制:显示范围、刻度线、比例、网络线 (3)标注控制:坐标轴名称、标题、相应文本; 6、基本程序设计 (1)编写命令文件:计算1+2+?+n<2000时的最大n值; (2)编写函数文件:分别用for和while循环结构编写程序,求2的0到n次幂的和。 三、预习要求 利用所学知识,编写实验内容中2到6的相应程序,并写在预习报告上。
飞行控制系统设计
(此文档为word格式,下载后您可任意编辑修改!) 一、对最简单的角位移系统的评价 1、某低速飞机本身具有较好的短周期阻尼,采用这种简单的控制规律是可行的。它的传递函数为: open p3_6 系统根轨迹为: nem1=-12.5; den1=[1 12.5]; sys1=tf(nem1,den1); nem2=[-1 -3.1]; den2=[1 2.8 3.24 0]; sys2=tf(nem2,den2); sys=series(sys1,sys2); rlocus(sys) 随着k的增大,该系统的一对闭环复极点的震荡阻尼逐渐减小。但由于飞机本身的阻尼较大,所以当k增大致1.34时,系统的震荡阻尼比仍有0.6。k增大到6.2时系统才开始不稳定。 2、现代高速飞机的短周期运动自然阻尼不足,若仍采用上述单回路控制系统则不能胜任自动控制飞机的要求。 open p3_10 系统根轨迹为: nem1=-10; den1=[1 10]; sys1=tf(nem1,den1);
nem2=[-4.3 -4.3*0.33]; den2=[1 0.61 3.3 0]; sys2=tf(nem2,den2); sys=series(sys1,sys2); rlocus(sys) 随着k增大,系统阻尼迅速下降。当k=1.06时,处于临界稳定。所以无法选择合适的k值以满足系统动静态性能。为了使系统在选取较大的k值基础上仍有良好的动态阻尼,引入俯仰角速度反馈。 二、具有俯仰角速率反馈的角位移自动驾驶仪参数设计open p3_16 1、系统内回路根轨迹为: nem1=-10; den1=[1 10]; sys1=tf(nem1,den1); nem2=[-4.3 -4.3*0.33]; den2=[1 0.61 3.3]; sys2=tf(nem2,den2); sys=series(sys1,sys2); rlocus(sys) 按物理概念似乎速率陀螺的作用越强,阻尼效果越显著。但根轨迹分析告诉我们,只有在一定范围内这种概念才是正确的,否则会得到相反的效果。这种现象是由舵回路的惯性造成的。舵回路具有不同时间常数时的内回路根轨迹图: Tδ=0 sys1=-1; nem2=[-4.3 -4.3*0.33]; den2=[1 0.61 3.3]; sys2=tf(nem2,den2); sys=series(sys1,sys2); rlocus(sys) Tδ=0.1
对汽车控制系统建模与仿真
对汽车控制系统建模与仿真 摘要:PID 控制是生产过程中广泛使用的一种最基本的控制方法,本文分别采用用简单的比例控制法和用PID控制来控制车速,并用MATLAB对系统进行了动态仿真,具有一定的通用性和实用性。 关键词:MATLAB 仿真;比例控制;PID 控制 1 MATLAB和PID概述 MATLAB是matrix和laboratory两个词的组合,意为矩阵工厂(矩阵实验室)。是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。 在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。 2车辆行驶过程车速的数学模型 对行驶在斜坡上的汽车的车速进行动态研究,可以分析车辆的性能,指导车辆的设计。MATLAB软件下的SIMULILNK模块是功能强大的系统建模和动态仿真的软件,为车辆行驶过程车速控制分析提供了一种有效的手段。 汽车行驶如图7.4.1所示的斜坡上,通过受力分析可知在平行于斜面的方向上有三个力作用于汽车上:发动机的力、空气阻力和重力沿斜面的分量下滑力。
飞行器控制系统课程设计
课程设计任务书 学生姓名:________ 专业班级: _______________ 指导教师:_______ 工作单位: ____________ 题目:飞行器控制系统设计 初始条件: 飞行器控制系统的开环传递函数为: G(s) -^500^ s(s 361.2) 控制系统性能指标为调节时间0.01s,单位斜坡输入的稳态误差 0.000521,相角裕度大于84度。 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) (1)设计一个控制器,使系统满足上述性能指标; (2)画出系统在校正前后的奈奎斯特曲线和波特图; (3)用Matlab画出上述每种情况的阶跃响应曲线,并根据曲线分析系统的动态性能指标; (4)对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析 计算的过程,给出响应曲线,并包含Matlab源程序或Simulink仿 真模型,说明书的格式按照教务处标准书写 时间安排:
指导教师签名: 系主任(或责任教师)签名: 目录 1串联滞后—超前校正的原理............ 错误! 未定义书签。 2 飞行器控制系统的设计过程. ................. 错误! 未定义书签。 2.1 飞行器控制系统的性能指标............... 错误! 未定义书签。 2.2 系统校正前的稳定情况................. 错误! 未定义书签。 2.2.1 校正前系统的波特图............. 错误! 未定义书签。 2.2.2 校正前系统的奈奎斯特曲线 (2) 2.2.3 校正前系统的单位阶跃响应曲线......... 错误! 未定义书签。 2.3 飞行器控制系统的串联滞后—超前校正 (4) 2.3.1 确定校正网络的相关参数 (4) 2.3.2 验证已校正系统的性能指标 (6) 2.4 系统校正前后的性能比较 (8) 2.4.1 校正前后的波特图 (8) 2.4.2 校正前后的奈奎斯特曲线 (9) 2.4.3 校正前后的单位阶跃响应曲线 (11) 3 设计总结与心得体会 (12) 参考文献 (13)
控制系统仿真实验报告
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
多模态话语分析
“蓝·创未来”广告是2010年北京国际车展上大众汽车倾力打造的一幅环保广告,当时从车展现场到北京大街小巷的候车亭里都贴满了这幅广告。选择该广告作为个案研究对象的原因有三:第一,这则广告尽管构图非常简单,却具备了语言、图形和颜色三个模态;第二,这幅广告的独特之处在于,颜色模态居于主导地位,而非语言或图像模态;第三,这幅广告具有鲜明的时代意义。从2009年底的哥本哈根世界气候峰会到国家战略性新兴产业规划①的出台,从“十二·五”规划到2011年9月6日胡锦涛主席在首届亚太经合组织林业部长级会议上发表的题为《加强区域合作实现绿色增长》的致辞,都反映了我国政府实现节能减排、低碳环保、绿色经济的强大决心和战略部署。而我国汽车业也进入了开发新能源、打造新能源汽车的历史阶段。所以这则广告非常契合目前中国大力倡导绿色经济的国家战略,是很有代表性的现代环保广告,内容洗练,留给人们很大的想象和思考空间。 大众汽车集团(中国)总裁兼CEO范安德博士向记者介绍大众汽车品牌“Think Blue (蓝·创未来)”的理念 一、多模态和多元识读概念的产生以及目前大学生多元识读能力现状的调查 随着科学技术的进步和社会生活的日益丰富多彩,人与人之间的交流方式正在发生着巨大变化。在公共交流的很多方面,我们可以深深感受到语言符号以及其他传统习惯中被人们认为是副语言的图像、音乐、颜色等,越来越多地处于突出、甚至是一种优势和中心的地位(韦琴红,2009)。作为单一模态的语言为主导的交流时代已经发展到了多模态交流的时代。然而,丰富多彩的符号资源是如何参与意义构建(meaning making)的、符号系统之间存在何种关系、人们如何解读充满多元符号系统的文本或其他载体,这些亟待解决的问题于20世纪90年代催生了一个新的研究领域——多模态话语分析(multimodal discourse analysis)。基于此,多元识读能力的概念也就应运而生。多元识读能力(multiliteracy),也称多模态识读能力,是新伦敦小组(New London Group)于2000年提出的概念,指具有能阅读所能接触到的各种媒体和模态的信息,并能循此产生相应的材料,如阅读互联网或互动的多媒体。Spiliotopoulos对多元识读有更宽广的视野,认为它指人们能从多种信息传递和信息网络理解各种模态的语篇,能发展批评性思维的技能,能与他人合作并帮助他们发展跨文化意识。根据现有材料,多元识读能力是多层次的,其中最高层次的能力要求参与者不仅能识读语篇信息,能解释符号和图像,利用多媒体和其他技术工具,如互联网,实现意义构建、学习和与他人互动(胡壮麟,2007;韦琴红,2009)。 多模态话语分析的概念和理论研究还处于初始阶段,国内外只有少数专家、学者从事该领域的研究。目前,人们多元识读的意识还几乎没有建立起来。然而,对于担当未来社会文化传播主力军的大学生而言,进行多元识读能力的培养有着非常重要的现实意义和时代意义。 为此,笔者选取了“2010北京国际车展”的大众汽车“蓝·创未来”环保广告为研究个案,以问卷调查和访谈的形式调查了北京部分高校不同年级的近200名本科生,尤其是英语专业本科生,了解其多元识读意识和能力。根据调查和访谈结果,笔者对大学生对该则广告解读的情况进行了总结: 1.大约92%的学生都能解读出蓝色代表海洋、天空,象征着清洁、环保的未来。这也说明颜色在这则广告中发挥的重要作用。 2.只有大约2%的学生,提及了广告把文字和颜色结合了起来,能够想到“Think”表示行动,广告要求大家用环保的思维方式去思考,然后行动,还世界一片蓝天。 3.大约3%的学生认为这则广告中的蓝色代表自由,目的是激起人们自由弛骋的想象,这是对广告的错误解读。 4.还有大约3%的学生提出,这则广告信息量太少,如果教师不提示是大众汽车的广告,
自动控制系统仿真教案
控制系统仿真技术实验指导书 实验课程 专业班级 学生姓名 学生学号 指导教师 年月日
实验报告须知 实验的最后一个环节是实验总结与报告,即对实验数据进行整理,绘制波形和图表,分析实验现象,撰写实验报告。每次实验,都要独立完成实验报告。撰写实验报告应持严肃认真、实事求是的科学态度。实验结果与理论有较大出入时,不得随意修改实验数据结果,不得用凑数据的方法来向理论靠拢,而要重新进行一次实验,找出引起较大误差的原因,同时用理论知识来解释这种现象。并作如下具体要求: 1. 认真完成实验报告,报告要用攀枝花学院标准实验报告册,作图要用坐标纸。 2. 报告中的电路图、表格必须用直尺画。绘制电路图要工整、选取合适比例,元件参数标 注要准确、完整。 3. 应在理解的基础上简单扼要的书写实验原理,不提倡大段抄书。 4. 计算要有计算步骤、解题过程,要代具体数据进行计算,不能只写得数。 5. 绘制的曲线图要和实验数据吻合,坐标系要标明单位,各种特性曲线等要经过实验教师 检查,曲线图必须经剪裁大小合适,粘附在实验报告相应位置上。 6. 应结合具体的实验现象和问题进行讨论,不提倡纯理论的讨论,更不要从其它参考资料 中大量抄录。 7. 思考题要有自己理解实验原理后较为详尽的语言表述,可以发挥,有的要画图说明, 不能过于简单,不能照抄。 8. 实验报告的分数与报告的篇幅无关。 9. 实验报告页眉上项目如实验时间、实验台号、指导教师、同组学生等不要漏填。
目录 目录 实验一:MATLAB语言的基本命令实验二:控制系统模型与转换 实验三:Simulink 仿真应用 实验四:控制系统工具箱的使用实验五:磁盘驱动系统综合分析实验六:单级倒立摆控制仿真设计
多模态数据挖掘的应用
多模态数据挖掘的应用 焦隽? (南京大学计算机科学与技术系, 南京 210093) The application of multimodal data mining:A survey Jun Jiao* (Department of Computer Science and Technology, Nanjing University, Nanjing 210093, China) Abstract: Nowadays, m ultimodal data available to us through the Internet and other electronic media are explosively increasing both in number and in variety. Efficiently analyzing these data will save people a large amout of time. However, due to the property of multimodal data, methods used to uni-modal data usually perform ineffectively here. To handle such massive multimodal data for various purposes, new technologies are in need of development.Data Mining helps people find a potentially useful knowledge from Massive Data, and play an important role in many fields. Data mining could only handle simple text data in the past. After several decades of development, data mining can deal with the multimedia data with complex structure now. Multimedia data is a sort of multimodal data. Some fusion and cross-media data mining algorithms can be used to mine multimodal data effectively. Based on the data mining approach to the task of analyzing multimodal data, this paper briefly introduces several methods fitting for multimodal data mining. Key words: multimodal; data mining 摘 要: 目前人们通过网络和其他电子媒体获得的多模态数据在数量和类别上都在飞速的增长。如果能对这些数据进行高效的分析,将为人们节省大量的时间。但是由于多模态数据本身的独特性质,许多传统应用于单模态数据的分析技术将无法有效的对其进行挖掘。因此人们需要新的技术来处理各种场景中大量的多模态数据。数据挖掘作为一种帮助人们从海量数据中发现潜在有用的知识的工具,在很多领域发挥了重要的作用。经过几十年的发展,数据挖掘已经从原来只能处理简单的文本数据,发展到为可以处理结构复杂的多媒体数据。多媒体数据是一种特殊的多模态数据,多媒体数据挖掘中的许多方法都利用到了目前挖掘多模态数据的核心思想。本文从数据挖掘的角度来分析多模态数据,对目前适用的几种多模态数据挖掘技术进行了简要介绍。 关键词: 多模态;数据挖掘 中图法分类号: TP301文献标识码: A 1 引言 近几十年来,计算机运算存储能力不断提高,数据产生和采集的速度也越来越快,因而数据量越来越大;而与此同时,人们面对巨量数据,能够直接获得的信息量却越来越有限。单纯的人力已经很难胜任对这样巨 ?作者简介:焦隽(1986——),男,湖南长沙人,硕士研究生,主要研究领域为数据挖掘,机器学习;
飞行器控制系统设计
学号: 课程设计 题目飞行器控制系统设计 学院自动化学院 专业自动化 班级自动化1002班 姓名 指导教师肖纯 2012 年12 月19 日
课程设计任务书 学生姓名: 专业班级:自动化1003班 指导教师: 肖 纯 工作单位: 自动化学院 题 目: 飞行器控制系统设计 初始条件:飞行器控制系统的开环传递函数为: ) 2.361(4500)(+= s s K s G 要求设计控制系统性能指标为调节时间ts 008.0≤秒,单位斜坡输入的稳态误差000443.0≤,相角裕度大于75度。 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写 等具体要求) (1) 设计一个控制器,使系统满足上述性能指标; (2) 画出系统在校正前后的奈奎斯特曲线和波特图; (3) 用Matlab 画出上述每种情况的阶跃响应曲线,并根据曲线分析系统 的动态性能指标; (4) 对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析 计算的过程,给出响应曲线,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。 时间安排: 指导教师签名: 年 月 日 系主任(或责任教师)签名: 年 月 日
随着经济的发展,自动控制技术在国民经济中发挥着越来越重要的作用。自动控制就是在没有人的参与下,系统的控制器自动的按照人预订的要求控制设备或过程,使之具有一定的状态和性能。在实际中常常要求在达到制定性能指标的同时能更加节约成本、能具有更加优良的效果。本次飞行器设计中,采用频域校正的方法使系统达到指定的性能指标,同时采用matlab仿真软件更加直观的进行仿真分析和验证。 在此设计中主要采用超前校正的方法来对系统进行性能的改进,通过分析、设计、仿真、写实验报告书的过程,进一步加深了对自动控制原理基本知识的理解和认识,同时通过仿真系统的奈奎斯特图、bode图、单位阶跃响应曲线,进一步理解了系统的性能指标的含义,同时也加深了对matlab仿真的掌握,培养了认识问题、分析问题、解决问题的能力。
控制系统仿真实验报告1
昆明理工大学电力工程学院学生实验报告 实验课程名称:控制系统仿真实验 开课实验室:年月日
实验一 电路的建模与仿真 一、实验目的 1、了解KCL 、KVL 原理; 2、掌握建立矩阵并编写M 文件; 3、调试M 文件,验证KCL 、KVL ; 4、掌握用simulink 模块搭建电路并且进行仿真。 二、实验内容 电路如图1所示,该电路是一个分压电路,已知13R =Ω,27R =Ω,20S V V =。试求恒压源的电流I 和电压1V 、2V 。 I V S V 1 V 2 图1 三、列写电路方程 (1)用欧姆定律求出电流和电压 (2)通过KCL 和KVL 求解电流和电压
四、编写M文件进行电路求解(1)M文件源程序 (2)M文件求解结果 五、用simulink进行仿真建模(1)给出simulink下的电路建模图(2)给出simulink仿真的波形和数值
六、结果比较与分析
实验二数值算法编程实现 一、实验目的 掌握各种计算方法的基本原理,在计算机上利用MATLAB完成算法程序的编写拉格朗日插值算法程序,利用编写的算法程序进行实例的运算。 二、实验说明 1.给出拉格朗日插值法计算数据表; 2.利用拉格朗日插值公式,编写编程算法流程,画出程序框图,作为下述编程的依据; 3.根据MATLAB软件特点和算法流程框图,利用MATLAB软件进行上机编程; 4.调试和完善MATLAB程序; 5.由编写的程序根据实验要求得到实验计算的结果。 三、实验原始数据 上机编写拉格朗日插值算法的程序,并以下面给出的函数表为数据基础,在整个插值区间上采用拉格朗日插值法计算(0.6) f,写出程序源代码,输出计算结果: 四、拉格朗日插值算法公式及流程框图
多模态批评话语分析
多模态批评话语分析 随着互联网和多媒体的迅速发展和广泛应用,语言文本不再是交际的唯一手段,图像、手势、动作、颜色、声音等其他非语言符号也成为信息传递的重要方式。我们生活在一个由多种符号资源构成的社会中,意义的构建不再单纯依靠语言文本,而是越来越依赖各种符号资源的整合。人类交流所依赖的媒介和渠道被称之为“模态”(modality),例如:语言、声音、颜色、图像、手势等符号系统。作为人类的一种重要交际行为,话语自然具有多模态性。传统的话语分析以大于句子的语言单位作为研究对象,对实际使用中的语言进行观察和分析,研究语言的组织结构、使用特点、语法规律、语言中的制约因素等内容,忽略了能够传递大量重要信息的其他非语言符号。可见,传统的话语分析已经不能满足人们的实际交际需要,多模态话语分析符合当下信息时代发展的要求和趋势。多模态话语分析为人类理解丰富多彩的符号系统提供了新视角,目前已发展成为一种重要的话语分析方式。像语言一样,视觉符号和声音符号貌似正常或中立(平淡无奇),实则隐含着个人或社会团体的不公正、偏见和歧视。因此,在多模态话语分析中,我们应坚持批评的立场,给予非语言模态符号足够的重视,关注其中含而不露的意识形态意义,尤其是那些被人们习以为常的思想和观点。在多模态话语和批评话语分析互相影响
和借鉴的基础上,多模态批评话语分析应运而生。 20世纪90年代,多模态话语分析在西方开始兴起,引起越来越多语言学家的关注。传统意义上的话语分析注重分析语言符号系统和语义结构本身,忽略了对其他符号系统(例如:图像、声音、颜色、手势等)的研究。随着现代科学技术的发展,人类交际开始依靠多种模态共同完成,包括图像、音乐、声音、颜色等。而这种运用语言、图像、声音、动作等多种符号资源进行交际的现象就是“多模态话语”(multimod aldis-course)。学界对交际中出现的图像、手势、姿态以及空间的运用也产生了浓厚兴趣。学者们认识到,对于意义理解不仅需要对话语语言的分析,更要对独立或相互依赖的其他符号资源进行研究。法国语言学家BarthesRlando是最早从事多模态话语分析研究的学者之一。他在1977年发表的论文《形象的修辞》中探讨了图像在表达意义上与语言的相互作用[1]。Kress和VanLeuwene[2][3][4](P343-368)[5](P35-50)作为社会符号学的代表研究了模态与媒体的关系,在系统功能语言学的基础上,构建了视频话语的分析模式和多模态话语分析框架,探讨了多模态符号表达意义的现象,包括视觉图像、颜色语法以及报纸的版面设计和不同媒介的作用等方面。2007年,朱永生[6](P82-86)提出了两种多模态话语的识别标准:(1)同时使用两种模态的话语叫做“多模态话语”;(2)只涉及一种模态,但包含两个或更多符号系统的话语也是“多模态话语”,比如:视觉
哈工大 计算机仿真技术实验报告 仿真实验四基于Simulink控制系统仿真与综合设计
基于Simulink 控制系统仿真与综合设计 一、实验目的 (1) 熟悉Simulink 的工作环境及其功能模块库; (2) 掌握Simulink 的系统建模和仿真方法; (3) 掌握Simulink 仿真数据的输出方法与数据处理; (4) 掌握利用Simulink 进行控制系统的时域仿真分析与综合设计方法; (5) 掌握利用 Simulink 对控制系统的时域与频域性能指标分析方法。 二、实验内容 图2.1为单位负反馈系统。分别求出当输入信号为阶跃函数信号)(1)(t t r =、斜坡函数信号t t r =)(和抛物线函数信号2/)(2t t r =时,系统输出响应)(t y 及误差信号)(t e 曲线。若要求系统动态性能指标满足如下条件:a) 动态过程响应时间s t s 5.2≤;b) 动态过程响应上升时间s t p 1≤;c) 系统最大超调量%10≤p σ。按图1.2所示系统设计PID 调节器参数。 图2.1 单位反馈控制系统框图
图2.2 综合设计控制系统框图 三、实验要求 (1) 采用Simulink系统建模与系统仿真方法,完成仿真实验; (2) 利用Simulink中的Scope模块观察仿真结果,并从中分析系统时域性能指标(系统阶跃响应过渡过程时间,系统响应上升时间,系统响应振荡次数,系统最大超调量和系统稳态误差); (3) 利用Simulink中Signal Constraint模块对图2.2系统的PID参数进行综合设计,以确定其参数; (4) 对系统综合设计前后的主要性能指标进行对比分析,并给出PID参数的改变对闭环系统性能指标的影响。 四、实验步骤与方法 4.1时域仿真分析实验步骤与方法 在Simulink仿真环境中,打开simulink库,找出相应的单元部件模型,并拖至打开的模型窗口中,构造自己需要的仿真模型。根据图2.1 所示的单位反馈控制系统框图建立其仿真模型,并对各个单元部件模型的参数进行设定。所做出的仿真电路图如图4.1.1所示。
控制系统数字仿真实验报告
控制系统数字仿真实验报告 班级:机械1304 姓名:俞文龙 学号: 0801130801
实验一数字仿真方法验证1 一、实验目的 1.掌握基于数值积分法的系统仿真、了解各仿真参数的影响; 2.掌握基于离散相似法的系统仿真、了解各仿真参数的影响; 3.熟悉MATLAB语言及应用环境。 二、实验环境 网络计算机系统(新校区机电大楼D520),MATLAB语言环境 三实验内容 (一)试将示例1的问题改为调用ode45函数求解,并比较结果。 实验程序如下; function dy = vdp(t,y) dy=[y-2*t/y]; end [t,y]=ode45('vdp',[0 1],1); plot(t,y); xlabel('t'); ylabel('y');
(二)试用四阶RK 法编程求解下列微分方程初值问题。仿真时间2s ,取步长h=0.1。 ?????=-=1 )0(2y t y dt dy 实验程序如下: clear t0=0; y0=1; h=0.1; n=2/h; y(1)=1; t(1)=0; for i=0:n-1 k1=y0-t0^2; k2=(y0+h*k1/2)-(t0+h/2)^2; k3=(y0+h*k2/2)-(t0+h/2)^2;
k4=(y0+h*k3)-(t0+h)^2; y1=y0+h*(k1+2*k2+2*k3+k4)/6; t1=t0+h; y0=y1; t0=t1; y(i+2)=y1; t(i+2)=t1; end y1 t1 figure(1) plot(t,y,'r'); xlabel('t'); ylabel('y'); (三)试求示例3分别在周期为5s的方波信号和脉冲信号下的响应,仿真时间20s,采样周期Ts=0.1。