Simulink的solver
Simulink的solver
1Solver简介
Solver是Simulink的仿真算法,译为解算器;选择一个合适的solver对仿真的运算时间与结果准确性非常重要。
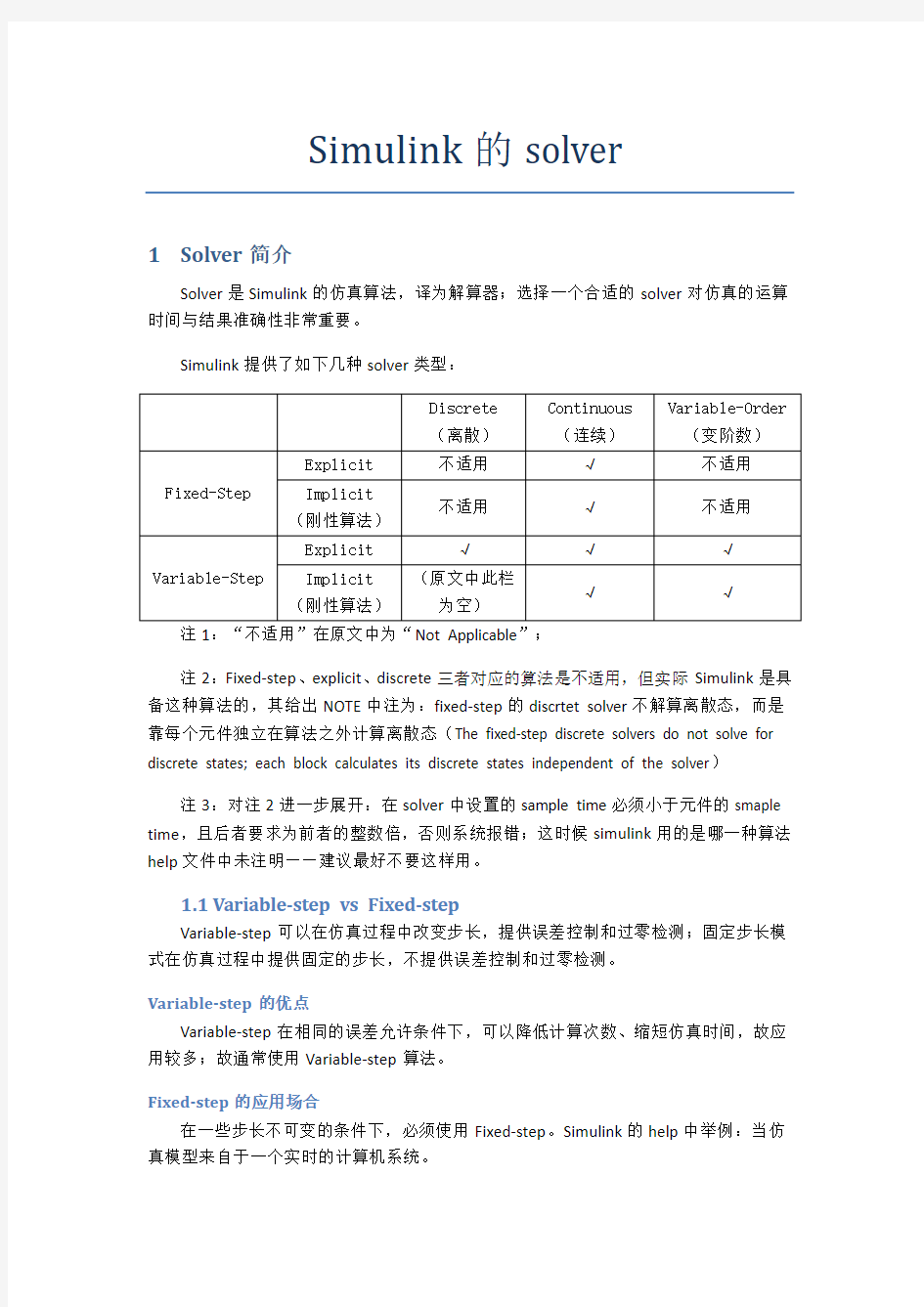
Simulink提供了如下几种solver类型:
Discrete (离散)Continuous
(连续)
Variable-Order
(变阶数)
Fixed-Step
Explicit不适用√不适用Implicit
(刚性算法)
不适用√不适用
Variable-Step
Explicit√√√Implicit
(刚性算法)
(原文中此栏
为空)
√√
注1:“不适用”在原文中为“Not Applicable”;
注2:Fixed-step、explicit、discrete三者对应的算法是不适用,但实际Simulink是具备这种算法的,其给出NOTE中注为:fixed-step的discrtet solver不解算离散态,而是靠每个元件独立在算法之外计算离散态(The fixed-step discrete solvers do not solve for discrete states; each block calculates its discrete states independent of the solver)
注3:对注2进一步展开:在solver中设置的sample time必须小于元件的smaple time,且后者要求为前者的整数倍,否则系统报错;这时候simulink用的是哪一种算法help文件中未注明——建议最好不要这样用。
1.1Variable-step vs Fixed-step
Variable-step可以在仿真过程中改变步长,提供误差控制和过零检测;固定步长模式在仿真过程中提供固定的步长,不提供误差控制和过零检测。
Variable-step的优点
Variable-step在相同的误差允许条件下,可以降低计算次数、缩短仿真时间,故应用较多;故通常使用Variable-step算法。
Fixed-step的应用场合
在一些步长不可变的条件下,必须使用Fixed-step。Simulink的help中举例:当仿真模型来自于一个实时的计算机系统。
1.2Discrete vs Continuous
如何选择
这里讲的离散与连续系统,和控制理论中的离散、连续系统是两个概念。
这里的离散,是在计算过程中人为的降低了计算的步长,以增加误差为代价,换来计算时间的缩短。实际严格地说,无论是什么模式,电脑计算始终是离散的。
在现在,计算机的速度已经很快了,而且我们做的仿真也不是特别复杂,一般在几分钟内能够得到仿真结果,通常使用连续的计算模式。
具体用法
当选择了系统是离散/连续后,需要设定仿真模型的状态。离散态的仿真模型必须使用离散算法;对连续态的仿真模型亦然。
SimpowerSystems中的应用
在SimpowerSystems工具箱中,除了solver,在powergui也可以设定连续/离散;前者是设定算法,后者是设定仿真模型的状态,二者应该一致。——当powergui设定为离散、solver设定为连续算法时,Simulink会将算法默认改为离散算法;但反之会报错。
一种特殊情况:solver、powergui均设定为连续,但在模型中的某个器件设定为离散态(SimpowerSystems中,只有一部分source可以设定连续/离散),此时是什么算法呢?——没有弄清楚,建议尽量不要这样用。
1.3Explicit vs Mplicit
即系统中的各变量是否具有相同的时间尺度;通常一个电力电子系统是刚性系统。
1.4Fixed/Variable-Order
通常,阶数越高,运算结果的精度越高;当然,运算速度越慢。
在计算误差要求严格的情况下,变阶数的算法在运算过程中可以改变阶数,故更有效,如ode113、ode15s——不要忽视由此造成的运算速度变慢。
2Fixed-step solver
概述
理论上,Fixed-step连续解算器能够处理不连续的模型,但需要增加不必要的计算量。因此,即使你指定了一个连续解算器,Simulink仍将采用离散解算器处理不连续的模型;但如果你试图用fixed-step离散求解连续的模型,会报错。
Fixed-step在Simulink中默认的算法是3阶的;——中等计算精度,既能处理连续、又能处理离散模型。如果不设定采样时间,默认是仿真时间/50。
Fixed-step没有误差、过零检测,故不能保证仿真结果的精度。
Fixed-step提供了一个刚性系统的算法:ode14x。
算法选择步骤
1.确定并设置系统的允许误差;
2.首先选择variable-step的ode45进行仿真;如果运行很慢,系统可能是刚性的,需
要更换一个刚性算法。这次仿真可以估计出一个合适的fixed step size。
3.使用ode1、默认的步长进行仿真;与采用ode45的结果进行对比,如果精度相同,
说明ode1是合适的算法——在精度允许的情况下,ode1是最简单、仿真时间最短的。
4.如果ode1不适用,从ode2~ode8依次进行试验,直至找到精度允许、阶次最低的
算……
5.一个效率最高的做法是:折半查找——选择ode3。如果ode3足够精确,试验一下
ode2与ode1,在ode2精度不满足要求时,ode3就是最好的算法。反之,试验ode4~ode8。
3Variable-step solver
概述
变步长算法的size取决于局部的误差。
Explicit Continuous Variable-Step Solvers
?ode45在第一次仿真时,是最好的测试算法,故Simulink将其设定为默认算法——
davy:实际在多数情况下,ode45是最佳选择;
?ode45比ode23要更快、更精确;如果ode45仿真速度很慢,说明系统可能是一个
刚性系统;——davy:这是一个跑龙套的算法,通常用不着;在系统误差要求不严格、求解问题简单时,可能会更有效。
?当对计算误差要求更严格时,ode113更有效。
Implicit Continuous Variable-Step Solvers
Solver Reset Method
对于ode15s, ode23t, and ode23tb这三种算法,需要对Solver Reset Method 进行设置,有两种选择: Fast and Robust。前者不对Jacobian矩阵进行验算,而后者反之。前者计算速度快,但可能为了一个确定的结果使用一个很小的步长——为了测试这种可能性,使用Fast、Robust两种模式分别进行运算,如果结果没有区别,可以放心的使用Fast;如果有明显差异,试着降低fast模式的步长。
?o de15s是一个变阶数的多步解算器。如果遇到刚性的问题,或使用ode45无法计算、
效率较低时,可以尝试ode15s;通常,先用2阶进行测试——如果精度不满足要求,增大阶数。
?ode23s是一个定阶的单步解算器,在允许误差较大的某些情况下,比ode15s更有
效率。
?ode23t是一种定阶的单步解算器,采用自由内插的梯形算法。如果系统有一定的刚
性,又要求解没有数值衰减时,可以使用这种方法。
?ode23tb,类似于ode23t,在允许误差较大的某些情况下,比ode15s更有效率。
4Solver应用
通常,选择可变步长的算法:
非刚性系统首选ode45;
刚性系统首选ode23tb;
通信仿真课程设计-matlab-simulink
成都理工大学工程技术学院 《通信仿真课程设计》报告 班级:信息工程1班 姓名:寇路军 学号: 201620101133 指导教师:周玲 成绩: 2019 年 3月 23 日
目录 通信仿真课程设计报告 (2) 一.绪论 (2) 二.课程设计的目的 (2) 三.模拟调制系统的设计 (3) 3.1 二进制相移键控调制基本原理 (3) 3.2 2PSK信号的调制 (3) 3.2.1模拟调制的方法 (3) 3.3 2PSK信号的解调 (4) 3.4 2PSK的“倒∏现象”或“反向工作” (5) 3.5功率谱密度 (5) 四.数字调制技术设计 (7) 4.1 2PSK的仿真 (7) 4.1.1仿真原理图 (7) 4.1.2 仿真数据 (7) 4.1.3 输出结果 (9) 总结 (10) 参考文献 (11)
通信仿真课程设计报告 一.绪论 随着社会的快速发展,通信系统在社会上表现出越来越重要的作用。目前,我们生活中使用的手机,电话,Internet,ATM机等通信设备都离不开通信系统。随着通信系统与我们生活越来越密切,使用越来越广泛,对社会对通信系统的性能也越高。另外,随着人们对通信设备更新换代速度越来越快。不得不缩短通信系统的开发周期以及提高系统性能。针对这两方面的要求,必需要通过强大的计算机辅助分析设计技术和工具才能实现。自从现代以来,计算机科技走上了快速发展道路,实现了可视化的仿真软件。 通信系统仿真,在目前的通信系统工程设计当中。已成为了不可替代的一部分。它表现出很强的灵活性和适应性。为我们更好地研究通信系统性能带来了很大的帮助。本论文主要针对模拟调制系统中的二进制相移键控调制技术进行设计和基于Simulink进行仿真。通过系统仿真验证理论中的结论。本论文设计的目的之一是进一步加强理论知识,熟悉Matlab软件。 Simulink是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。在该环境中,无需大量书写程序,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统。Simulink具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点,并基于以上优点Simulink 已被广泛应用于控制理论和数字信号处理的复杂仿真和设计。同时有大量的第三方软件和硬件可应用于或被要求应用于Simulink。 二.课程设计的目的 1.掌握模拟系统2PSK调制和解调原理及设计方法。 2.熟悉基于Simulink的通信系统仿真。
Simulink 入门教程
Simulink 快速入门 启动 Simulink 软件 要构建模型,可以使用Simulink? Editor 和Library Browser。 启动 MATLAB 软件 启动 Simulink 之前,请先启动 MATLAB?。请参阅启动和关闭(MATLAB)。 配置 MATLAB 以启动 Simulink 您在 MATLAB 会话中打开第一个模型时需要的时间比打开后续模型长,因为默认情况下,MATLAB 会在打开第一个模型时启动 Simulink。这种即时启动 Simulink 的方法可以缩短 MATLAB 启动时间,避免不必要的系统内存占用。 要快速打开第一个模型,您可以配置 MATLAB,在它启动时同时启动 Simulink。 要启动 Simulink 而不打开模型或 Library Browser,请使 用start_simulink。 根据 MATLAB 的启动方式,恰当使用此命令: ?在 MATLAB startup.m文件中 ?在操作系统命令行中,使用matlab命令和-r开关例如,要在运行 Microsoft?Windows?操作系统的计算机上启动 MATLAB 时启动 Simulink,请创建具有以下目标的桌面快捷方式: matlabroot\bin\win64\matlab.exe -r start_simulink 在 Macintosh 和Linux?计算机上,可在启动 MATLAB 时使用以下命令启动Simulink 软件: matlab -r start_simulink 打开 Simulink Editor 要打开 Simulink Editor,您可以: ?创建一个模型。在 MATLAB 的Home选项卡上,点击Simulink并选择一个模型模板。 或者,如果您已经打开了 Library Browser,请点击New Model按钮。 有关创建模型的其他方法,请参阅创建模型。 ?打开一个现有模型。要打开最近使用的模型,请在 MATLAB Home选项卡上点击Simulink。 或者,如果您知道要打开的模型的名称,可在 MATLAB 命令提示符下输入名称,例如vdp。有关打开模型的其他方法,请参阅打开模型。
Simulink系统仿真课程设计
《信息系统仿真课程设计》 课程设计报告 题目:信息系统课程设计仿真 院(系):信息科学与技术工程学院 专业班级:通信工程1003 学生姓名: 学号: 指导教师:吴莉朱忠敏 2012 年 1 月 14 日至2012 年 1 月 25 日 华中科技大学武昌分校制
信息系统仿真课程设计任务书
目录 摘要 (5) 一、Simulink仿真设计 (6) 1.1 低通抽样定理 (6) 1.2 抽样量化编码 (9) 二、MATLAB仿真设计 (12) 2.1、自编程序实现动态卷积 (12) 2.1.1 编程分析 (12) 2.1.2自编matlab程序: (13) 2.1.3 仿真图形 (13) 2.1.4仿真结果分析 (15) 2.2用双线性变换法设计IIR数字滤波器 (15) 2.2.1双线性变换法的基本知识 (15) 2.2.2采用双线性变换法设计一个巴特沃斯数字低通滤波器 (16) 2.2.3自编matlab程序 (16) 2.2.4 仿真波形 (17) 2.2.5仿真结果分析 (17) 三、总结 (19) 四、参考文献 (19) 五、课程设计成绩 (20)
摘要 Matlab 是一种广泛应用于工程设计及数值分析领域的高级仿真平台。它功能强大、简单易学、编程效率高,目前已发展成为由MATLAB语言、MATLAB工作环境、MATLAB图形处理系统、MATLAB数学函数库和MATLAB应用程序接口五大部分组成的集数值计算、图形处理、程序开发为一体的功能强大的系统。本次课程设计主要包括MATLAB和SIMULINKL 两个部分。首先利用SIMULINKL 实现了连续信号的采样及重构,通过改变抽样频率来实现过采样、等采样、欠采样三种情况来验证低通抽样定理,绘出原始信号、采样信号、重构信号的时域波形图。然后利用SIMULINKL 实现抽样量化编码,首先用一连续信号通过一个抽样量化编码器按照A律13折线进量化行,观察其产生的量化误差,其次利用折线近似的PCM编码器对一连续信号进行编码。最后利用MATLAB进行仿真设计,通过编程,在编程环境中对程序进行调试,实现动态卷积以及双线性变换法设计IIR数字滤波器。 本次课程设计加深理解和巩固通信原理、数字信号处理课上所学的有关基本概念、基本理论和基本方法,并锻炼分析问题和解决问题的能力。
simulink 仿真教程(从入门到入土)+报告(真)
Simulink仿真 摘要:simulink作为matlab的衍生模组,具有强大的仿真能力。原则上你可以将任意具有明确映射关系的物理量进行仿真模拟。对于相互间关系不明确的物理量,则可以通过输入输出数据的采集,然后通过模糊控制的方案替代明确的映射关系。本文主要针对的是以电焊机电路为主,其他仿真为辅的教程性质的文章。关键词:matlab Simulink 仿真电焊机教程 第一章初识软件 (2) 1.1 simulink 简介 (2) 1.2 simulink基础页面 (2) 1.3 常用库的介绍 (3) 1.3.1 simulink库 (4) 1.3.1.1 常用模块库 (4) 1.3.1.2 其他常用子库模块 (6) 1.3.2 电气库Simscape (7) 1.3.2.1 Electrical库 (7) 1.3.2.2 Specialized Technology库 (8) 1.4模块连接 (9) 第二章简单仿真系统的建立 (11) 2.1传递函数S信号仿真 (11) 2.1.1 运放环节的等效替代 (11) 2.1.2 等效变换 (12) 2.1.3 逻辑仿真 (13) 2.2电气库仿真 (13) 2.3子系统和模块的建立 (15) 2.3.1 子系统的建立 (15) 2.3.2 模块的建立 (16) 第三章复合仿真 (18) 3.1 m函数模块 (18) 3.1.1 简单编程 (18) 3.1.2 部分函数介绍 (19) 3.2 整体模型 (21) 3.3 仿真注意事项 (22) 3.3.1 注意事项1 (22) 3.3.2 注意事项2 (23) 3.3.3 注意事项3 (24) 3.3.4 注意事项4 (24) 结语 (25)
matlabsimulink初级教程
S i m u l i n k仿真环境基础学习Simulink是面向框图的仿真软件。 7.1演示一个Simulink的简单程序 【例7.1】创建一个正弦信号的仿真模型。 步骤如下: (1)在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(SimulinkLibraryBrowser)窗口,如图7.1所示。
图7.1Simulink界面 (2)单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。 (3)在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。 (4)用鼠标单击所需要的输入信号源模块“SineWave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“SineWave”模块就被添加到untitled窗口;也可以用鼠标选中“SineWave”模块,单击鼠标右键,在快捷菜单中选择“addto'untitled'”命令,就可以将“SineWave”模块添加到untitled窗口,如图7.2所示。
(5) Scope ”模块(示波器)拖放到“untitled ”窗口中。 (6)在“untitled ”窗口中,用鼠标指向“SineWave ”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope ”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。如图7.3所示。 (7)开始仿真,单击“untitled ”模型窗口中“开始仿真”图标 ,或者选择菜单“Simulink ”——“Start ”,则仿真开始。双击“Scope ” 模块出现示波器显示屏,可以看到黄色的正弦波形。如图7.4所示。 图7.2Simulink 界面
基于Simulink仿真双闭环系统综合课程设计
- -- 课程设计 双闭环直流调速系统设计及仿真验证 学院年级:工程学院08级 组长:陈春明学号2 08自动化1班成员一:陈木生学号3 08自动化1班 指导老师: 日期:2012-2-28 华南农业大学工程学院
摘要 转速、电流双闭环调速系统是应用最广的直流调速系统,由于其静态性能良好,动态响应快,抗干扰能力强,因而在工程设计中被广泛地采用。现在直流调速理论发展得比较成熟,但要真正设计好一个双闭环调速系统并应用于工程设计却有一定的难度。 Matlab是一高性能的技术计算语言,具有强大的科学数据可视化能力,其中Simulink具有模块组态简单、性能分析直观的优点,方便了系统的动态模型分析。应用Simulink来研究双闭环调速系统,可以清楚地观察每个时刻的响应曲线,所以可以通过调整系统的参数来得出较为满意的波形,即良好的性能指标,这给分析双闭环调速系统的动态模型带来很大的方便。 本研究采用工程设计方法,并利用Matlab协助分析双闭环调速系统,依据自动控制系统快、准、稳的设计要求,重点分析系统的起动过程。 关键词:双闭环直流调速Simulink 自动控制
目录 1、直流电机双闭环调速系统的结构分析....................... 1.1 双闭环调速系统的组成............................... 1.2 双闭环调速系统的结构.................................... 2 、建立直流电机双闭环调速系统的模型............................ 2.1 小型直流调速系统的指标及参数......................... 2.2 电流环设计............................................... 2.3 转速环设计................................................ 3、直流电动机双闭环调速系统的MATLAB仿真.................... 3.1 系统框图的搭建............................................. 3.2 PI控制器参数的设置...................................... 3.3 仿真结果.................................................... 4、结论与总结....................................................... 5、参考资料.......................................................
通信仿真课程设计-matlab-simulink
理工大学工程技术学院 《通信仿真课程设计》报告 班级:信息工程1班 姓名:寇路军 学号: 3 指导教师:周玲 成绩: 2019 年 3月 23 日
目录 通信仿真课程设计报告 (2) 一.绪论 (2) 二.课程设计的目的 (2) 三.模拟调制系统的设计 (3) 3.1 二进制相移键控调制基本原理 (3) 3.2 2PSK信号的调制 (3) 3.2.1模拟调制的方法 (3) 3.3 2PSK信号的解调 (4) 3.4 2PSK的“倒∏现象”或“反向工作” (5) 3.5功率谱密度 (5) 四.数字调制技术设计 (7) 4.1 2PSK的仿真 (7) 4.1.1仿真原理图 (7) 4.1.2 仿真数据 (7) 4.1.3 输出结果 (9) 总结 (10) 参考文献 (11)
通信仿真课程设计报告 一.绪论 随着社会的快速发展,通信系统在社会上表现出越来越重要的作用。目前,我们生活中使用的手机,,Internet,ATM机等通信设备都离不开通信系统。随着通信系统与我们生活越来越密切,使用越来越广泛,对社会对通信系统的性能也越高。另外,随着人们对通信设备更新换代速度越来越快。不得不缩短通信系统的开发周期以及提高系统性能。针对这两方面的要求,必需要通过强大的计算机辅助分析设计技术和工具才能实现。自从现代以来,计算机科技走上了快速发展道路,实现了可视化的仿真软件。 通信系统仿真,在目前的通信系统工程设计当中。已成为了不可替代的一部分。它表现出很强的灵活性和适应性。为我们更好地研究通信系统性能带来了很大的帮助。本论文主要针对模拟调制系统中的二进制相移键控调制技术进行设计和基于Simulink进行仿真。通过系统仿真验证理论中的结论。本论文设计的目的之一是进一步加强理论知识,熟悉Matlab软件。 Simulink是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。在该环境中,无需大量书写程序,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统。Simulink具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点,并基于以上优点Simulink 已被广泛应用于控制理论和数字信号处理的复杂仿真和设计。同时有大量的第三方软件和硬件可应用于或被要求应用于Simulink。 二.课程设计的目的 1.掌握模拟系统2PSK调制和解调原理及设计方法。 2.熟悉基于Simulink的通信系统仿真。
matlab-simulink 初级教程
Simulink仿真环境基础学习 Simulink是面向框图的仿真软件。 7.1演示一个Simulink的简单程序 【例7.1】创建一个正弦信号的仿真模型。 步骤如下: (1) 在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图7.1所示。
(2) 单击工具栏上的图标或选择菜单“File ”——“New ”——“Model ”,新建一个名为“untitled ”的空白模型窗口。 (3) 在上图的右侧子模块窗口中,单击“Source ”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink 下的Source 子模块库,便可看到各种输入源模块。 (4) 用鼠标单击所需要的输入信号源模块“Sine Wave ”(正弦信号),将其拖放到的空白模型窗口“untitled ”,则“Sine Wave ”模块就被添加到untitled 窗口;也可以用鼠标选中“Sine Wave ”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave ”模块添加到untitled 窗口,如图7.2所示。 图7.1 Simulink 界面
(5) 用同样的方法打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器)拖放到“untitled”窗口中。 (6) 在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。如图7.3所示。 (7) 开始仿真,单击“untitled ”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”——“Start”,则仿真开始。双击“Scope”模块出现示波器显示屏, 可以看到黄色的正弦波形。如图7.4所示。 图7.2 Simulink界面
Simulink 下实现PID 控制器控制效果地验证(过程计算机控制课程设计)
1.设计任务 设被控对象的传递函数是 建立Simulink模型: 采用Ziegler- Nichols经验公式对PID参数进行整定,从而确定比例放大系数Kp,积分时间常数Ti,微分时间常数Td。最后,通过在t=4000s时,外加一个幅值为15的扰动信号来验证该控制系统的控制效果。 2.MATLAB/SIMULINK软件简介(800字左右) Simulink是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。在该环境中,无需大量书写程序,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统。Simulink具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点,并基于以上优点Simulink已被广泛应用于控制理论和数字信号处理的复杂仿真和设计。同时有大量的第三方软件和硬件可应用于或被要求应用于Simulink。Simulink是MATLAB中的一种可视化仿真工具,是一种基于MATLAB的框图设计环境,
是实现动态系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。Simulink可以用连续采样时间、离散采样时间或两种混合的采样时间进行建模,它也支持多速率系统,也就是系统中的不同部分具有不同的采样速率。为了创建动态系统模型,Simulink提供了一个建立模型方块图的图形用户接口(GUI) ,这个创建过程只需单击和拖动鼠标操作就能完成,它提供了一种更快捷、直接明了的方式,而且用户可以立即看到系统的仿真结果。Simulink是用于动态系统和嵌入式系统的多领域仿真和基于模型的设计工具。对各种时变系统,包括通讯、控制、信号处理、视频处理和图像处理系统,Simulink提供了交互式图形化环境和可定制模块库来对其进行设计、仿真、执行和测试。. 构架在Simulink基础之上的其他产品扩展了Simulink多领域建模功能,也提供了用于设计、执行、验证和确认任务的相应工具。Simulink与MATLAB 紧密集成,可以直接访问MATLAB大量的工具来进行算法研发、仿真的分析和可视化、批处理脚本的创建、建模环境的定制以及信号参数和测试数据的定义。 其特点:丰富的可扩充的预定义模块库 交互式的图形编辑器来组合和管理直观的模块图 以设计功能的层次性来分割模型,实现对复杂设计的管理 通过Model Explorer 导航、创建、配置、搜索模型中的任意信号、参数、属性,生成模型代码 提供API用于与其他仿真程序的连接或与手写代码集成 使用Embedded MATLAB?模块在Simulink和嵌入式系统执行中调用MATLAB算法 使用定步长或变步长运行仿真,根据仿真模式(Normal,Accelerator,Rapid Accelerator)来决定以解释性的方式运行或以编译C代码的形式来运行模型
基于simulink的综合通信实验报告
湖南科技大学 信息与电气工程学院《课程设计报告》 题目:综合通信系统课程设计 专业:*** 班级:*** 姓名:*** 学号:***
任务书 题目综合通信系统课程设计 时间安排第七学期的第19-20两周 目的: 1、掌握通信系统的基本构成; 2、掌握通信系统工作原理; 3、了解通信系统设计的基本过程;掌握基本理论和解决实际问题的方法,锻炼学生综合分析问题解决问题的能力。 4、为学生的毕业设计和以后的工作打下良好的基础。 要求: 课程设计前,学生必须知道课程设计的目的以及教师所规定的任务及其具体要求,有针对性地进行预习和设计。课程设计时,学生必须遵守实验室纪律,严格考勤登记,服从指导老师和实验室工作人员的安排。课程设计结束后,学生必须向所指导教师提交课程设计报告,且课程设计报告要求字迹清楚,版面整洁,报告内容包括调试过程和结果以及心得体会。 总体方案实现:本课程设计主要是利用simulink、通信系统工具箱以及信号处理工具箱来完成通信系统的设计与仿真。Simulink是MATLAB提供的实现动态系统建模和仿真的一个软件包,许多工具箱里的模块都被封装成了Simulink模块。MATLAB中的通信系统工具箱是一个运算函数和仿真模块的集合体,可以用来进行通信领域的研究、开发、系统设计和仿真。使用MATLAB软件,设计通信系统,配置各个通信组成部分的参数,通过仿真可以得到仿真波形,很明显的可以观察到参数不同仿真结果不尽相同。 指导教师评语:
一、设计目的和任务 综合通信系统课程设计是电子信息工程专业和通信工程专业教学的一个实践性与综合性环节,是电子信息工程专业及通信工程专业各门课程的综合以及通信、信息、信号处理等基本理论与实践相结合的部分。主要是为了让学生利用所学的专业理论知识以及实践环节所积累的经验,结合实际的通信系统的各个环节,设计出一个完整综合通信系统,并进一步加深学生对通信系统的深入理解,培养学生设计通信系统的能力,为毕业设计和以后的工作打下良好的基础。 1、设计目的: 1、掌握通信系统的基本构成; 2、掌握通信系统工作原理; 3、了解通信系统设计的基本过程;掌握基本理论和解决实际问题的方法,锻炼学生综合分析问题解决问题的能力。 5、为学生的毕业设计和以后的工作打下良好的基础。 2、设计任务: 1、设计通信系统的各个环节; 2、将上述设计好的各个环节设计成一个综合通信系统。 二、设计工具介绍 本课程设计主要是利用simulink、通信系统工具箱以及信号处理工具箱来完成通信系统的设计与仿真。 1、Simulink Simulink是MATLAB提供的实现动态系统建模和仿真的一个软件包。它让用户把精力从编程转向模型的构造,经常与其它工具箱一起使用,实际上,许多工具箱里的模块都被封装成了Simulink模块。 2、通信系统工具箱及其功能 2.1 通信系统工具箱概述 MATLAB中的通信系统工具箱是一个运算函数和仿真模块的集合体,可以用来进行通信领域的研究、开发、系统设计和仿真。通信系统工具箱中包含的模块
单闭环直流调速系统simulink仿真课程设计
目录 一、摘要.......................................................... - 3 - 二、课程设计任务 .................................................................................................... - 3 - 三、课程设计内容 .................................................................................................... - 3 - 1、PID控制原理及PID参数整定概述.................................................................... - 3 - 2、基于稳定边界法(临界比例法)的PID控制器参数整定算法 ............................ - 5 - 3、利用Simulink建立仿真模型............................................................................ - 8 - 4、参数整定过程 .................................................................................................- 12 - 5、调试分析过程及仿真结果描述.........................................................................- 16 - 四、总结 ...................................................................................................................- 17 - 五、参考文献 ...........................................................................................................- 17 -
simulink入门教程
S i m u l i n k入门教程-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
Simulink?快速入门 启动?Simulink?软件 要构建模型,可以使用 Simulink??Editor 和 Library Browser。 启动?MATLAB?软件 启动 Simulink 之前,请先启动 MATLAB?。请参阅启动和关闭?(MATLAB)。 配置?MATLAB?以启动?Simulink 您在 MATLAB 会话中打开第一个模型时需要的时间比打开后续模型长,因为默认情况下,MATLAB 会在打开第一个模型时启动 Simulink。这种即时启动Simulink 的方法可以缩短 MATLAB 启动时间,避免不必要的系统内存占用。 要快速打开第一个模型,您可以配置 MATLAB,在它启动时同时启动 Simulink。要启动 Simulink 而不打开模型或 Library Browser,请使用?start_simulink。 根据 MATLAB 的启动方式,恰当使用此命令: 在 MATLAB?startup.m?文件中 在操作系统命令行中,使用?matlab?命令和?-r?开关 例如,要在运行 Microsoft??Windows??操作系统的计算机上启动 MATLAB 时启动Simulink,请创建具有以下目标的桌面快捷方式: matlabroot\bin\win64\matlab.exe -r start_simulink 在 Macintosh 和?Linux??计算机上,可在启动 MATLAB 时使用以下命令启动Simulink 软件: matlab -r start_simulink 打开?Simulink?Editor 要打开 Simulink Editor,您可以: 创建一个模型。在 MATLAB 的?Home?选项卡上,点击?Simulink?并选择一个模型模板。 或者,如果您已经打开了 Library Browser,请点击?New Model?按钮?。有关创建模型的其他方法,请参阅创建模型。 打开一个现有模型。要打开最近使用的模型,请在 MATLAB?Home?选项卡上点击?Simulink。 或者,如果您知道要打开的模型的名称,可在 MATLAB 命令提示符下输入名称,例如?vdp。有关打开模型的其他方法,请参阅打开模型。
电气传动课程设计-simulink-仿真
电气传动课程设计-simulink-仿真
————————————————————————————————作者:————————————————————————————————日期:
电气传动课程设计 题目:转速反馈控制调速系统的仿真 姓名韩雪晴 学院信息与电气工程学院 专业电气工程及其自动化 年级2009级 学号2001 指导教师赵枚
一、概述 调节原理 带转速负反馈的闭环直流调节系统,中有一台与电动机通州安装的测速发电机TG,引出与被调量转速成正比的负反馈电压Ub,与给定电压UB相比较后,得到转速偏差电压ΔUb,经放大器A,产生电力电子转换器UPE的控制电压Uc,用以控制电动机转速n 实验原理图如下图 利用MATLAB下的SIMULINK软件进行系统仿真是十分简单和直观的,SIMULINK提供了使用系统模型框图组态的仿真平台,使用SIMULINK进行仿真和分析可以像在纸上绘图一样简单。用户可以用图形化的方法直接建立起仿真系统的模型,并通过SIMULINK环境中的菜单直接启动系统的仿真过程,同时将结果在示波器上显示出
来,SIMULINK也实线与MATLAB,C或者FORTRAN之间的数据传递。所以,掌握强大的SIMULINK工具会大大地增强用户系统的仿真能力。 二、实验目的 1、进一步学习利用MATLAB下的SIMULINK来对控制系统进行仿真。 2、掌握转速、电流反馈控制直流调速系统的原理。 3、学会利用工程的方法设计ACR、ASR调节器的方法 三、实验原理 SIMULINK的简介: Simulink是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。在该环境中,无需大量书写程序,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统。Simulink具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点,并基于以上优点Simulink已被广泛应用于控制理论和数字信号处理的复杂仿真和设计。同时有大量的第三方软件和硬件可应用于或被要求应用于Simulink。 功能: Simulink是MATLAB中的一种可视化仿真工具,是一种基于MATLAB的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。Simulink可以用连续采样时间、离散采样时
Simulink 入门教程
要构建模型,可以使用Simulink? Editor 和Library Browser。 启动 MATLAB 软件 启动 Simulink 之前,请先启动 MATLAB?。请参阅启动和关闭(MATLAB)。 配置 MATLAB 以启动 Simulink 您在 MATLAB 会话中打开第一个模型时需要的时间比打开后续模型长,因为默认情况下,MATLAB 会在打开第一个模型时启动 Simulink。这种即时启动 Simulink 的方法可以缩短 MATLAB 启动时间,避免不必要的系统内存占用。 要快速打开第一个模型,您可以配置 MATLAB,在它启动时同时启动 Simulink。 要启动 Simulink 而不打开模型或 Library Browser,请使 用start_simulink。 根据 MATLAB 的启动方式,恰当使用此命令: ?在 MATLAB startup.m文件中 ?在操作系统命令行中,使用matlab命令和-r开关 例如,要在运行 Microsoft?Windows?操作系统的计算机上启动 MATLAB 时启动 Simulink,请创建具有以下目标的桌面快捷方式: matlabroot\bin\win64\matlab.exe -r start_simulink 在 Macintosh 和Linux?计算机上,可在启动 MATLAB 时使用以下命令启动Simulink 软件: matlab -r start_simulink 打开 Simulink Editor 要打开 Simulink Editor,您可以: ?创建一个模型。在 MATLAB 的Home选项卡上,点击Simulink并选择一个模型模板。 或者,如果您已经打开了 Library Browser,请点击New Model按钮。 有关创建模型的其他方法,请参阅创建模型。 ?打开一个现有模型。要打开最近使用的模型,请在 MATLAB Home选项卡上点击Simulink。
课程设计专家PID控制系统simulink仿真
内蒙古科技大学 课程设计 题目:专家PID控制系统仿真 学生姓名: 学号: 专业:自动化 班级: 指导教师:
专家PID控制系统仿真 摘要 简单介绍了常规PID控制的优缺点和专家控制的基本原理,介绍了专家PID控制的系统结构,针对传递函数数学模型设计控制器。基于MATLAB的simulink仿真软件进行应用实现,仿真和应用实现结果均表明,专家PID控制具有比常规PID更好的控制效果,且具有实现简单和专家规则容易获取的优点。 论文主要研究专家PID控制器的设计及应用,完成了以下工作: (1)介绍了专家PID控制和一般PID控制的原理。 (2)针对任务书给出的受控对象传递函数G(s)=523500/(s3+87.35s2+10470s) ,并且运用MATLAB实现了对两种PID控制器的设计及simulink仿真,且对两种PID控制器进行了比较。 (3)结果分析,总结。 仿真结果表明,专家PID控制采用多分段控制,其控制精度更好,且具有优越的抗扰性能。 关键词:专家PID,专家系统,MATLAB,simulink仿真
Expert PID control system simulation Abstract The advantages and disadvantages of conventional PID control and the basic principle of expert control are briefly introduced, and the structure of expert PID control system is introduced. Simulink simulation software based on MATLAB is implemented. The simulation and application results show that the expert PID control has better control effect than the conventional PID, and has the advantages of simple and easy to get. This paper mainly studies the design and application of the expert PID controller: (1) the principle of PID control and PID control is introduced in this paper. (2) the controlled object transfer function G (s) =523500/ (s3+87.35s2+10470s), and the use of MATLAB to achieve the design and Simulink simulation of two kinds of PID controller, and the comparison of two kinds of PID controller. (3) result analysis, summary. The simulation results show that the control accuracy of the expert PID control is better than that of the control. Key words:Expert PID , MA TLAB, expert system, Simulink, simulation
课程设计--基于MATLABsimulink的三相交流异步电机正转和反转建模
基于MATLAB/simulink的三相交流异步电机正转和反转建模与仿真 姓名:李鹏程 学号:031040525 专业:电气工程及其自动化 完成日期:2012年12月18日
[摘要] 在MATLAB/simulink环境下,设计和组合了三相交流异步电动机正转和反转的仿真模型。仿真结果证明了控制方法的有效性,并且为其他交流异步电动机的设计提供了基本的设计理论的简单构型。随着近年来电力电子工业和计算机科技的迅速发展,交流异步电动机赖于其结构简单,运行可靠,过载能力强,维护方便等优点逐渐应用于工业生产中的各个领域,并获得了广泛的接纳认可以及好评。笔者仅仅基于简单的模块进行建模与仿真,从仿真模型中得出与实际理论相符合的情况,最终达到理论与实践相结合的目的。 一:三相交流电源模块设置
以上为A项,相应的B、C两相相位分别改为120度、240度。二:异步电动机参数设计设置
转子以鼠笼式模块(squirrel-cage)进行连接,输出三相电流内部短路。参考坐标系选用静止坐标系(stationary)。 异步电机的一切参数设置基于国家工频。
三:分路器设置 其中包含: (1)定子三相电流:is-a、is-b。is-c; (2)转子三相电流:ir-a、ir-b、ir-c; (3)转速n=wm/2pi; (4)转矩Te; 这些量也是仿真中最后需要观察和分析的数据量。四:完整的三相交流异步电机simulink模型
异步电机simulink仿真模型 1:仿真中必须有powergui模块。其作用是: (1):可以显示系统稳定状态的电流和电压以及电路以及所有的状态变量值;(2):为了执行仿真,其可以允许修改初始状态值; (3):可以执行负载的潮流计算,可以初始化包括三相电机在内的三相网络,三相电机的简化模型为同步电机或异步电机。即,其在本仿真中起到的作用。2:异步电动机模块,使用的是鼠笼式转子,输出三项电流再其内部短路,采用静止坐标系,有利于波形的观察和分析。 3:总线选择器(bus slecter):一路总线输入后多路输出,方便波形的检测。 五:仿真结果及具体波形 (一)电机正转
基于MATLABsimulink的2FSK系统的仿真课程设计报告
课程设计 基于MATLABsimulink的2FSK系统的仿真 电子与信息工程学院 信息与通信工程系
课程设计评分标准
基于MATLAB/simulink的2FSK系统的仿真 一、摘要 本文是基于matlab和simulink环境下对信号的调制与解调过程的仿真,通过仿真,对系统的误码率的分析,以及理论与仿真结果的比较, 二、关键字:
目录 1 背景知识 (1) 1.1通信简介 (1) 1.2仿真系统的简介: (2) 1.32FSK的调制与解调的原理: (3) 1.3.1 2FSK的产生 (4) 1.3.2 2FSK滤波器的解调及抗噪声性能 (6) 1.3.3 由相关调制解调的原理图 (9) 2 仿真系统模型的设计: (9) 2.1仿真框图 (9) 2.2仿真目的和意义: (9) 2.3仿真思路 (10) 2.4M文件和仿真结果 (10) 2.5 SIMULINK仿真模型图: (16) 2.6结果分析: (21) 2.6.1 Matlab仿真结果分析 (21) 2.6.2 (22) 3 心得体会: (22) 4 参考文献 (22)
1 背景知识 1.1 通信简介 通信就是克服距离上的障碍,从一地向另一地传递和交换消息。消息是信息源所产生的,是信息的物理表现,例如,语音、文字、数据、图形和图像等都是消息。消息有模拟消息(如语音、图像等)以及数字消息(如数据、文字等)之分。所有消息必须在转换成电信号(通常简称为信号)后才能在通信系统中传输。所以,信号是传输消息的手段,信号是消息的物质载体。 相应的信号可分为模拟信号和数字信号,模拟信号的自变量可以是连续的或离散的,但幅度是连续的,如电话机、电视摄像机输出的信号就是模拟信号。数字信号的自变量可以是连续的或离散的,但幅度是离散的,如电船传机、计算机等各种数字终端设备输出的信号就是数字信号。 通信的目的是传递消息,但对受信者有用的是消息中包含的有效内容,也即信息。消息是具体的、表面的,而信息是抽象的、本质的,且消息中包含的信息的多少可以用信息量来度量。 通信技术,特别是数字通信技术近年来发展非常迅速,它的应用越来越广泛。通信从本质上来讲就是实现信息传递功能的一门科学技术,它要将大量有用的信息无失真,高效率地进行传输,同时还要在传输过程中将无用信息和有害信息抑制掉。当今的通信不仅要有效地传递信息,而且还有储存、处理、采集及显示等功能,通信已成为信息科学技术的一个重要组成部分。 通信系统就是传递信息所需要的一切技术设备和传输媒质的总和,包括信息源、发送设备、信道、接收设备和信宿(受信者) ,它的一般模型如图1所示。 →→→→ 信息源发送设备信道接收设备受信者 ↑ 噪声源 图1 通信系统一般模型 通信系统可分为数字通信系统和模拟通信系统。数字通信系统是利用数字信号来传递消息的通信系统,其模型如图2所示,
simulink_matlab仿真教程
simulink matlab仿真环境教程 Simulink是面向框图的仿真软件。 演示一个Simulink的简单程序 【例1.1】创建一个正弦信号的仿真模型。 步骤如下: (1) 在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图1.1所示。 图7.1 Simulink界面 (2) 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。 (3) 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。 (4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“Sine Wave”模块就被添加到untitled窗口;也可以用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到untitled窗口,如图1.2所示。
(5) 用同样的方法打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器)拖放到“untitled”窗口中。 (6) 在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。如图1.3所示。 (7) 开始仿真,单击“untitled”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”——“Start”,则仿真开始。双击“Scope”模块出现示波器显示屏,可以看到黄色的正弦波形。如图1.4所示。 (8) 保存模型,单击工具栏的图标,将该模型保存为“Ex0701.mdl”文件。 1.2 Simulink的文件操作和模型窗口 1.2.1 Simulink的文件操作 1. 新建文件 新建仿真模型文件有几种操作: ?在MATLAB的命令窗口选择菜单“File”“New”“Model”。 ?在图1.1的Simulink模块库浏览器窗口选择菜单“File”“New”“Model”,或者单击工具栏的图标。 ?在图1.3的Simulink模型窗口选择菜单“File”“New”“Model”,或者单击工具栏的图标。 2. 打开文件 打开仿真模型文件有几种操作: 图7.2 Simulink界面 图7.3 Simulink模型窗口 图7.4 示波器窗口