RSLogix500简易入门
RSLogix500简易入门培训
一.RSLogix500介绍:
RSLogix500是AB开发的应用于SLC500型中型PLC和Micrologix系列小型PLC的编程软件。具有结构简单,条理清晰,功能强大等优点。
二.建立一个工程(Project):
1.严格意义上来说,一个完整的PLC程序应该称为工程(Project)。工程一般都是以PLC的CPU型号来定义的。一个完整的PLC工程应该包括以下内容:
1)I/O配置(IO Configuration):
I/O配置是指PLC除CPU以外的所有其他硬件,包括:电源模块,框架,DI模块,DO模块,AI模块,AO模块等。
2)通讯通道配置(Channel Configuration):
对于SLC500型PLC,每块CPU上一般有2种通讯接口:通道0(Channel 0),是9针DB9串口,默认通讯协议就是DF1通讯;对于1747-L551型PLC而言,通道1(Channel 1)是以太网接口。在通道配置里可以根据需要修改通讯参数。
3)变量:
PLC其实是一种功能相对简单,但是工作稳定的计算机。因此,PLC工作也需要根据程序来进行。而程序里就要需要变量。将各种变量的计算结果输出,就实现了控制。
4)梯形图程序:
梯形图程序是PLC编程中常用的一种编程方法,用梯形图编程即实现了PLC的控制逻辑。PLC 就是根据梯形图的控制逻辑来工作的。
2.如何在RSLogix500软件里建立一个工程(Project)。如下图所示:
图1.
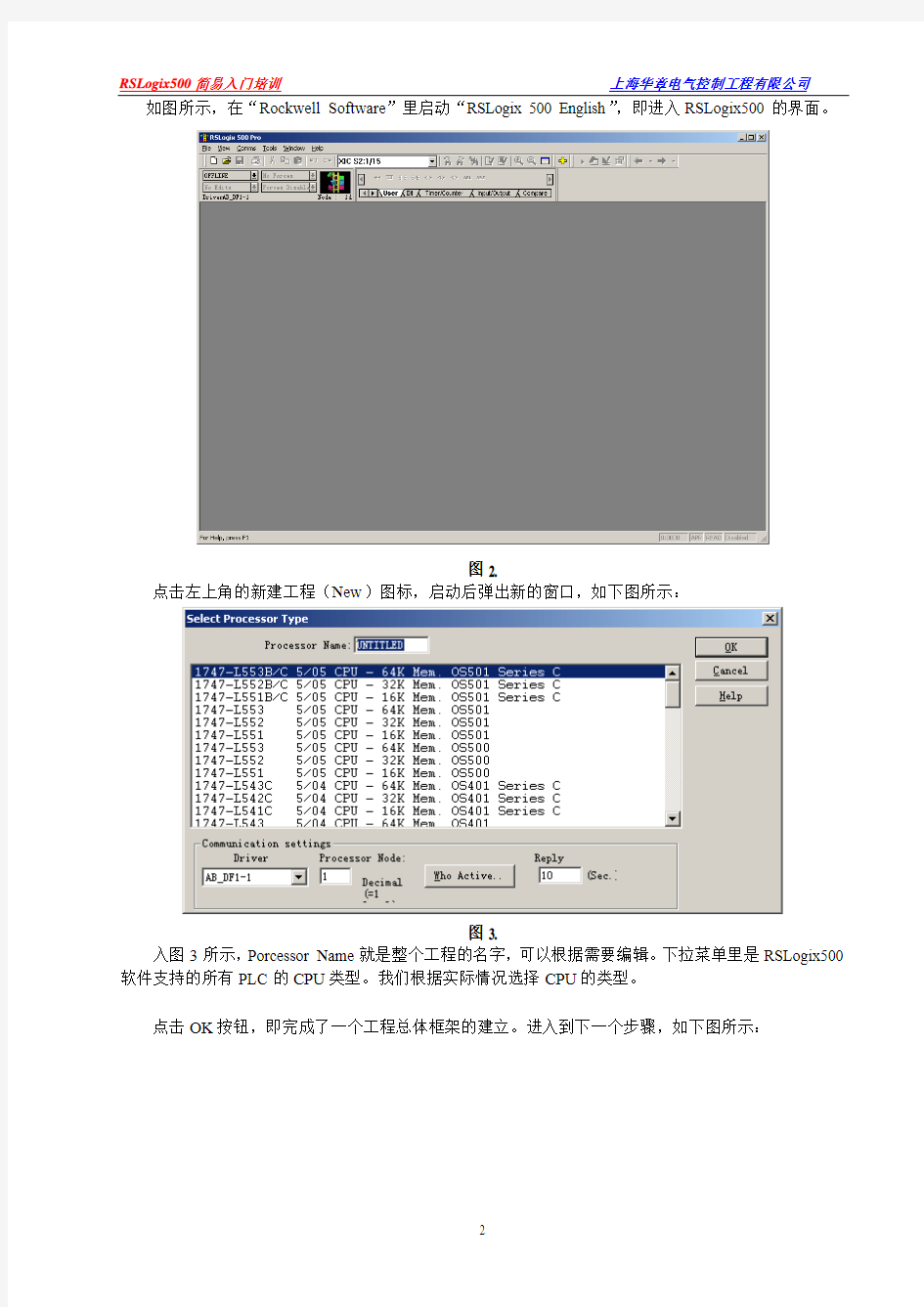
点击左上角的新建工程(New)图标,启动后弹出新的窗口,如下图所示:
图3.
入图3所示,Porcessor Name就是整个工程的名字,可以根据需要编辑。下拉菜单里是RSLogix500
软件支持的所有PLC的CPU类型。我们根据实际情况选择CPU的类型。
点击OK按钮,即完成了一个工程总体框架的建立。进入到下一个步骤,如下图所示:
图4.
三.如何配置I/O(IO Configuration):
点击左侧下拉菜单里的“IO Configuration”选项,弹出I/O配置窗口,如下图所示:
可以通过本地扩展电缆(1746-C9)扩展3个机架共30个模块,因此有Rack1,2,3共3个清单。根据实际情况,我们选择需要的框架型号,如1746-A10,1746-A13等。选中后,在下面的菜单里可以看到相应的槽号。例如,如果你选择的是1746-A10,则下面的槽号菜单里是0到9,其中,CPU处于0号槽。如果有2个机架,那么号码还是连续的,但机架之间有一条“------”线将其分开,以示区别。
用户可以根据实际情况,将硬件里实际存在的模块从右侧的模块总表里选择出来,拖拽到左侧的槽位清单里。放置模块的时候,请注意:拖拽进取的模块类型以及放置的槽位要与实际情况相同。
当然,作为一种杰出的单机型PLC,SLC500不用这么复杂的手工I/O配置。如果用户已经有硬件,并且已将所有模块安装到位,那么有一种非常简单的方法可以迅速而又准确的进行I/O配置。
如图5,注意在Rack选项右侧有一个“Read IO Config”的按钮。点击该按钮,弹出以下窗口:
图6.
点击“Who Active”,系统弹出以下窗口:
这其实是RSLogix500调用RSLinx,访问SLC500。点击图7中的OK,按纽,返回图6画面。点击“Read IO Config”按钮,系统弹出以下画面:
图8.
点击OK,此时,硬件配置窗口发生以下变化:
图9.
此时,系统自动从连接的SLC500上读取实际的硬件配置情况。这是SLC500型PLC 较之其他PLC的一大优势。
四.如何配置通讯通道(Channel Configuration):
为了满足SLC500型PLC与其他设备(如触摸屏,上位机,仪表,其他PLC)之间的通讯,有时候需要对通讯通道进行重新配置。
图10.
如图10所示,双击“Channel Configuration”,进入通道配置菜单。如下图所示:
1.通道0,串口通讯:
如图11所示,对于从503,504和505型PLC而言,Channel 0都是RS232C串口,通道支持的协议是DF1通讯协议。其主要配置参数结束如下所示:
参数名称内容
Driver:DF1通讯的可选类型,具体有以下配置:
DF1 Full Duplex
DH-485
DF1 Half Duplex Slave
DF1 Half Duplex Master
DF1 Radio Modem
Shutdown
Source ID:指SLC500进行串口通讯时在网络上的站点号码,一般是0~31
Baud:即波特率。波特率越高,通讯速度越快,但通讯距离越短;反之,波特率约低,通讯速度越慢,但通讯距离越长。
Parity:奇偶校验。在SLC500里只有None(无校验)和EVEN(偶校验)的选项。
Stop Bits:停止位,有1,1.5和2 3个选项。
Control:通讯协议控制方式,有2种:No Handshaking(无需握手型)和Full Duplex Modem(远程Modem访问形式)
冗余循环校验方式:分为CRC和BCC两种校验方式
Error
Detection:
2.通道1,以太网通讯:
如图12所示,选择Channel 1页面:
图12.
进行的配置如下:
3.注意事项:
在设置串口的时候,请注意:一旦串口设置参数发生变化,那么串口就不再是标准的RSLinx可以支持的串口通讯了。此时,通过RSLinx的RS232C-DF1通讯设置是无法与PLC再进行通讯连接的了。若要重新连接,只有拔去CPU内的电池,清除程序,将CPU恢复到出厂默认值才可以。
五.变量说明及变量的介绍:
变量是PLC内计算值的载体。变量主要分为输入量,输出量和中间变量。
如下图所示,SLC500的变量栏在其编程界面的左下方。在Data Files下的就是各种SLC支持的变量类型:
图13.
SLC内的常用变量介绍如下:
型模块和AI,AO型模块才会增加输出型变量。如下图所示:
图14.
从图中可以看到,O:2.3~O:2.11共计8个变量是属于插在2号槽的8路模拟量输入模块1746-NI8块的,每一个变量针对AI模块的1个通道。从1746-NI8的用户手册中可以知道,O2.3~O2.11是给每个通道进行配置所用的。而最后的O:4.0是由于I/O模块中增加的1746-OW16 16路开关量模块而增加的。它的每一个位,即O:4.0/0~O:4.0/15,都对应着一路继电器输出回路。
2.I1-INPUT,输入型变量:
输入型变量与输出型变量相同,是由于I/O模块的增加而增加的,无法手动增加。如下图所示:
图15.
如图15所示,I:1.0是分配给16点数字量输入模块1746-IB16的,该模块插在1号槽;而I:2.0~I2.9是给8路模拟量输入模块1746-NI8块的,该模块插在2号槽。
这里有一点要注意:图14中和图15中显示的1746-NI8是同一块模块。之所以一个O2:0有16个0,而I:2.0只有一个0,是由于变量的现实方式不同。注意两图的右下角的“Radix”选项。这是变量的数字显示方式。显示方式有:2进制,8进制,10进制,16进制和ASCII码显示。图14中采用的是2进制显示方式,而图15种采用的是10进制显示方式。不同的变量采用不同的现实方式显示,可以更明确的看出各变量的意义。
3.S2-STATUS,CPU状态变量:
S2变量也是一种特殊变量。S型变量都是一些代表CPU系统运行状态的特殊变量。通过阅读S型变量的情况,可以了解CPU的一些详细的工作信息。
如下图所示:
图16.
如图所示,S:39~S:37内存储的就是PLC时钟内的日期。例如,2006-11-2,则S:37内存放的是02,S:38内存放的是11,S:39内存放的是2006。其他的变量及意义参加指令集。
4.B3-BINARY,二进制布尔型变量:
B型变量是BOOL型变量,即只有1位,只能为0或1的变量。这是PLC中常用的一种变量类型。
的运行状态和参数,它也可以看作几个变量的结合。其具体参数如下所示:
如果我们做一个加法计时器(TON),T4:0.BASE=0.1s, T4:0.PRE=3000。当T4:0.EN=1时,表示计时器计时条件满足,计时器开始以0.1s为单位,开始计时,计时的过程中,T4:0.TT=1,T4:0.ACC里存储着计时器的当前计时值(如1300,就是指计时器已经计时了1300*0.1=130s)。当计时器计满3000*0.1=300秒后,T4:0.ACC=3000并保持不变,而T4:0.EN=1保持不变。此时,T4:0.DN=1,表示计时器计时完成,T4:0.TT=0。
6.C5-COUNTER,计数器型变量:
计数器与计时器比较类似。所不同的是计数器是靠上升沿或者下降沿脉冲出发的。具体说明参见指令集。
7.R6-CONTROL,控制型变量:
R型在SLC里是控制型变量,具体使用参见指令集。
N型即整型变量。一个整形变量有16个位组成,最多可以表示2的16次方-1=65535。9.F8-FLOAT,浮点数型变量:
浮点数即带小数点的数。SLC里浮点数保留到小数点后1位。
要在SLC里建立新的变量,只要如下图所示:
图18.
图18所示,右击Data Files,选中New,弹出如下窗口:
图19.
图19中,由于系统默认的变量到F8,所以新建变量就从9开始计数。Type表示用户需要建立的变量的类型,可根据需要进行选择。Name是变量的变量名(只能用英文)。Desc里是对变量的解释和说明(可用中文)。而Elements表示的是建立的这一批变量的数量(最大不能超过256)。
例如,如果我要建立35个整形变量,设置画面如下:
图20.
如图20所示,我建立了35个变能量,准确地址为N:9.0~N:9.34,这些变量的头部名称都叫HAHA。
另外,要修改变量的属性,例如,修改变量的数量,如下图所示:
右击T4,选择Properties,出现如下窗口:
图21.
在这里将T:4的数量从1改为20,返回后双击T:4.0,可以看到如下画面:
图22.
这样,计时器变量就从原来的T:4.0这一个变成了T:4.0~T:4.19共20个变量。
六.如何编辑,校验梯形图程序及整个工程:
变量建立完成后,就可以进行编程了。编程,就是以梯形图的方式,将控制逻辑表达出来。
在RSLogix500软件里进行梯形图的编程方法如下:
图23.
如图23所示,从界面的顶部拖拽一行道下面的编程界面,即增加了一行。用同样的方法拖拽一个常开触点和一个线圈,如下图所示:
图24.
从右侧的变量栏里拖拽相应的变量到线圈的问号处。如果拖拽到为,问号处会显示绿色。如下图所示:
图25.
将变量放进去,最终如下图所示:
图26.
请注意,此时,这行的左侧有“e”标志存在,表示步程序还处于编辑状态,没有通过编译而执行。点击工具栏上的2个编译按钮,如下图所示:
图27.
左侧的图标表示编译该程序,而右侧的图标表示对整个工程进行编译。
按下2个编译按钮后,如下图所示:
以下载给PLC了。也可以保存程序文件。程序文件的后缀名是*.RSS。
七.如何下载,上传程序:
程序编译完成后,可以下载给PLC运行了。我们将详细讲解如何通过串口下载程序的过程。
根据要求,将电脑通过编程电缆与SLC500连接好,打开RSLinx,建立串口通讯驱动,找到SLC500。打开已经建立好的程序。如下图所示,选中Comms下的System Comms:
图29.
之后弹出如下画面:
图30.
从这个画面可以看出,其实质是RSLogix500软件调用RSLinx,搜索需要下载的PLC。当选中SLC500后,右侧的“Online”,“Upload”和“Download”从灰色变成黑色,表示可以进行上传和下载的操作。
选择“Download”,就将程序下载给PLC。之后,画面如下图所示:
图31.
此时,程序已经开始运行。当把B:3.0/0至1后,O:4.0/0=1,1746-OW16的第1路灯点亮。如下图所示:
图32.
从PLC里上传程序的方法与下载基本相同,所不同的是选择“Upload”。
八.如何在线监控和在线修改程序:
很多情况下,由于PLC已经在正常工作状态,不能停机再次修改程序。而且,为了排查可能出现的问题,需要现场维护人员长时间直接从PLC里监控部分变量的运行情况。因此,掌握监控PLC和在修改PLC程序的方法,对于现场维护人员而言是十分重要的。
1.在线监控PLC的方法十分简单。打开RSLinx,建立串口通讯驱动,找到SLC500。打开已经建立好的程序。如下图所示,选中Comms下的System Comms,弹出如下画面:
图33.
如果之前,你已经有了PLC里的程序,那么选择Online,就可以与PLC连上了。如果打开的程序与PLC里的程序匹配,软件会自动上线。否则,软件会提示电脑里的程序与PLC里的程序不符,询问用户是Download(下载)程序还是Upload(上载)程序。
如果用户没有PLC程序,那么就直接选择Upload。第一次Upload时,系统会提示请建立一个新文件。给文件命名以后,系统会自动从PLC里将程序上载过来,存储于该文件。
此时,用户处于在线监控状态,可以直接在程序或变量表里观察相关变量的变化情况。
2.在线编辑程序是PLC编程的一项重要技巧。所谓在线编程,就是指在PLC按程序运行的情况下进行程序的编辑与修改。修改好后,PLC会在2个扫描运行周期之间将修改后的程序植入原程序里。因此,在线编程不会影响PLC的正常运行。
在线编程的操作步骤如下:
1.如下图所示:
钢琴入门:汤普森简易钢琴教程
钢琴入门:汤普森简易钢琴教程
钢琴入门教程:小汤(汤普森简易钢琴教程》 《小汤》的学习目的是:通过对中央C附近的音符进行反复认音练习,掌握五线谱基础知识,并将线谱与键盘有机地联系起来;通过数拍子,培养正确的节奏感。为下一步的学习打下一个良好的基础 第一册涵盖的音域有意识地作了限制。只介绍中央C以上的五个音和以下的五个音,时值也从全音符到四分音符为止,不再扩展,这样就有可能包括许多以复习形式出现的曲例,不必另找补充教材。总之,本教程的每一册课本都保持各自的完整性,都有各自的书写练习、视谱练习和复习曲目,在以后的各册中还将增加技巧练习。 伴奏: 书中大部分曲例,配有供教师和家长用的伴奏谱。它们都经过精心的创作,使那些简易的小曲听起来尽可能像结构庞大的乐曲的片断。这样做有很多好处,不仅有可能用不同的调弹奏,避免总是徘徊在C大调上,令人生厌;而且可以用自己严格的速度和鲜明的节奏对学生施加影响,特别是他们在弹奏中带有充满活力的节拍重庆,能使学生一开始就“感觉”到节奏的存在。 第一册:《约翰.汤普森简易钢琴教程一》 A 音符节奏:(图 1) (图2) B 音域:中央C为中心,上下五个音(见图2) C 节拍:4/4 、2/4、 3/4 D 调性:C调 重点:主要以认识五线谱、手指编号,一拍二拍三拍四拍音符组合。 《小汤1》: 1.严格地只在白键上弹奏。 2.在附点前较早引入了切分节奏(《雷格泰姆舞》、《弗吉尼,我的故乡》、《摘棉花的老人》、《我的忧愁谁知道》) 3.三拍子的巧妙进入。《小矮人进行曲》紧接《小矮人舞曲》。 4.逐渐增加手指数量。 第一学时
内容:从钢琴键盘至练习题 本课时的知识点:1.音名、五线谱、全音符、二分音符、四分音符、中央C 2.钢琴键盘、基本弹奏姿势、基本手型 本课时的重点:1.中央C在五线谱与钢琴键盘上的位置、四个音符的不同形状及时值 2.正确手型中手指支撑与手腕放松的平衡感觉 本课时的难点:1.音符时值在弹奏中的把握、唱名与音名的本质区别 2.大指弹奏中央C的正确手型 练习把握:1.反复确认键盘上中央C在高音谱表与低音谱表上的不同位 置、 2.四个音符长短时值的练习:我采用一个比喻方法,叫数苹果法,具体做法是,在一个相同距离内(比如学生放在钢琴上的书的长短为例)学生拍一下,嘴数一拍,节拍器响一次等于手拍一下的时间,而我就告诉他们,拍一次一个苹果。这个方法对于年龄小(4-5周岁,下同)的初学学生掌握拍子、用节拍器练习节奏非常适用。 3.大指弹奏中央C时虎口的开度、手指支撑时力的均衡。 时间安排:各年龄段不同,我这里以年龄小的学生为例。开始每天以15-20分钟为基点,然后循序渐进逐步增加时间。 第二学时 学习内容:火车、玛丽有只小羔羊、海军工兵、伞兵。注:1.年龄小的学生,可把内容分为两次上课和练习。2.根据学生的心里特点,老师可把课本内容顺序做一定调整,便于学生集中学习和记忆。 知识点:1.高音谱表D、E音名的位置、低音谱表B、A音名的位置 2.键盘上D、E、B、A的位置 3.左右手2、3手指在键盘上的站立练习 4.曲子四拍子、三拍子中强拍的弹奏 重点:1.高音谱表、低音谱表中新学音名的位置 2.键盘上新学音名位置的确认
儿童钢琴入门教程--手指操
儿童钢琴入门教程--手指操 如何提高儿童的兴趣,是当今幼儿钢琴教学中的一个难题.幼儿时期是学习钢琴的最佳年龄,但是伴随这个年龄段的教学困难是孩子尚未懂事,一切都由着兴致来.这些苦恼长年来一直 困扰着钢琴教师和家长.如何提高幼儿学习钢琴的兴趣,培养起主观的学习能动性是目前幼 儿钢琴教学中迫切需要解决的问题.这此本人经过长期思考与摸索,编出一套符合幼儿心理 的方法.这些方法结合了幼儿平时喜欢玩弄的游戏,因些符合他们的兴趣,获得了孩子们的喜爱.通过近二十年的教学实践,证明这是个有效的方法.今整理成文,供教师同行和家长们使用. 一手臂放松操 面对钢琴零起点的孩子,在开始正规的课程之前,我总是先让他们信识身体的哪一部分是手臂,手臂可以怎样活动,怎样才能找到手臂的重量,重量又是如何落下.于是编了以下三节手臂放松操,由易到难,邮简到繁,让孩子们在游戏中轻松愉快地认识了手臂以及手臂在演奏钢琴时的规范动作.为钢琴演奏的第一步"非连音的弹奏"学习做好了准备. 1.手臂放松的练习 通过长期观察,我发现孩子们在弯腰的时候比站立时更容易找到手臂放松的感觉,于是编了以下的练习操,让他们看着自己的手臂放松的甩动,在教他们认识手臂的同时也找了手臂 的重量. "大象甩鼻子: 小朋友们请站好,两腿稍微分开,距离与肩宽.弯腰九十度,手臂放松垂直.手臂像大象鼻子一样,左右服起来. 2. 手臂用力的练习 通过前一节前一节"手臂放松操"的练习,有朋友们能够在弯腰的状态下顺利地找到手臂的重量.此时马上站立起来做以下的第二节操,还象前一节那样前后服甩动.把刚才的整党带过来,就能比较方便的找到站立状态下的手臂重量.随着摆动幅度的加大,小朋友们还能体会到重量的由小到大,由轻到重,在找到重量的同时学会如何运用,为"非连音的弹奏"打下扎实的基础. "小猴荡秋千" 小朋友们请站好,两腿稍微分分开,距离与肩宽.两个手臂同时向前后摆动,就象小猴在荡秋千一样越摆越大,越甩越高. 3. 手臂协调的练习 第三节操"手臂放松操"可以有多种练习方法:单干手向前甩动,单手向后甩动,双手同时向前甩动,双手同时身后甩动以及双手反向甩动. " 荷兰大风车" 小朋友们请站好,双手顺时针甩手臂,双手逆时针甩手臂.右手顺时针甩手臂,左手逆时针甩手臂,做两个荷兰大风车. 能过以一一系列的练习,小朋友们已经完全了解手臂的重量,能够熟练地运用重量,并且在用力的同时能够感觉到腰部的支持和身体的平衡,身体的协调能力也得到了很大的锻炼. 二五指练习操 通过第一部分三节操的训练,小朋友们已经能够在弯腰和站立的状态下顺利地找到手臂的重量,并能放松自如的运用,可以说这是个很好的开始.现在我们要训练坐着的状态下找到手
儿童钢琴入门教程--手指操(整理版)
儿童钢琴入门教程——手指操 如何提高儿童的兴趣,是当今幼儿钢琴教学中的一个难题。幼儿时期是学习钢琴的最佳年龄,但是伴随这个年龄段的教学困难是孩子尚未懂事,一切都由着兴致来。这些苦恼长年来一直困扰着钢琴教师和家长。如何提高幼儿学习钢琴的兴趣,培养起主观学习能动性是目前幼儿钢琴教学中迫切需要解决的问题。为此本人经过长期思考与摸索,编出一套符合幼儿心理的方法。这些方法结合了幼儿平时喜欢玩弄的游戏,因此符合他们的兴趣,获得了孩子们的喜爱。通过近二十年的教学实践,证明这是个有效的方法。今整理成文,供教师同行和家长们使用。 一、手臂放松操 面对钢琴零起点的孩子,在开始正规的课程之前,我总是先让他们认识身体的哪一部分是手臂,手臂可以怎样活动,怎样才能找到手臂的重量,重量又是如何落下,于是编了以下三节手臂放松操,由易到难,由简到繁,让孩子们在游戏中轻松愉快地认识了手臂以及手臂在演奏钢琴时的规范动作。为钢琴演奏的第一步“非连音的弹奏”学习做好了准备。 1、手臂放松的练习 通过长期观察,我发现孩子们在弯腰的时候比站立时更容易找到手臂放松的感觉,于是编了以下的练习操,让他们看着自己的手臂放松的甩动,在教他们认识手臂的同时也找了手臂的重量。 “大象甩鼻子”(合手两个八拍) 小朋友请站好,两腿稍微分开,距离与肩同宽。弯腰九十度,手臂放松垂直。手臂像大象鼻子一样,左右甩起来。 2、手臂用力的练习 通过前一节“手臂放松操”的练习,有朋友们能够在弯腰的状态下顺利地找到手臂的重量。此时马上站立起来做下面的第二节操,还象前一节那样前后甩动。把刚才的感觉带过来,就能比较方便地找到站立状态下的手臂重量。随着摆动幅度的加大,小朋友还能体会到重量的由小到大,由轻到重,在找到重量的同时学会如何运用,为“非连音的弹奏”打下扎实的基础。 “小猴荡秋千”(合手两个八拍) 小朋友请站好,两腿稍微分分开,距离与肩宽。两个手臂同时向前后摆动,就象小猴在荡秋千一样越摆越大,越甩越高。 3、手臂协调的练习 第三节操“手臂放松操”可以有多种练习方法:单手向前甩动、单手向后甩动、双手同时向前甩动、双手同时身后甩动以及双手反向甩动。 “荷兰大风车”(分、合手四个八拍) 小朋友请站好,双手顺时针甩手臂,双手逆时针甩手臂。右手顺时针甩手臂,左手逆时针甩手臂,做两个荷兰大风车。 通过以上一系列的练习,小朋友已经完全了解手臂的重量,能够熟练地运用重量,并且在用力的同时能够感觉到腰部的支持和身体的平衡,身体的协调能力也得到了很大的锻炼。 二、五指练习操 通过第一部分三节操的训练,小朋友已经能够在弯腰和站立的状态下顺利地找到手臂的重量,并能放松自如的运用,可以说这是个很好的开始。现在我们要训练坐着的状态下找到手臂的重量,让这个重量完全放松,自然地掉在大腿上。这样就可以非常方便地把手臂的重量掉在钢琴上了。 1、手臂重量垂落的练习 在做这个练习时要注意检查坐姿是否端正,手臂弯曲的角度和手掌的方向是否正确。手臂重量掉在腿上时,
教师参考资料_第二章简易机器人设计(1)_移动风车
科学探索活动手册教师参考资料 第二章简易机器人设计(1) 活动项目三移动风车 一、教学目标 1、强化对各种传动结构的综合应用及利用各种传动结构进行优化设计,了解动力的远距离传输与方向的改变。 2、熟悉永远循环模块、直行模块、转弯模块、启动电机模块、停止电机模块、延时等待模块等编程应用。 二、教学重点 激发学生兴趣,提高想象力。 三、主要教学方法 演示法、任务驱动法、课堂讨论法、讲授法。 四、教学准备 1、移动风车模型每小组一套; 2、中小学通用技术课程配套教材第三册《科学探索》活动手册043页《活动准备》里面的结构胶件每小组一套(有条件每人一套); 3、BDS机器人编程软件、教学课件。 五、教学过程 (一)创设情境导入 1、播放教学课件里面荷兰风车的图片。 2、旁白:有一种风景,静静地竖立在地平线上,远远望见,
仿佛童话世界一般,那一刻便注定你不能忘记,不能忘记她底衬的国度:这就是风车,荷兰的风车。今天,你能做出一部你梦想中的风车吗? (二)教学活动环节设计 1、教师展示移动风车的模型,并打开电源键,移动风会前进、转弯,当转弯时风冀会旋转。 2、让学生思考,风车旋转的动力在哪里?让学生观察风车齿轮啮合传动的各个环节。 3、引导学生做好搭建的分工,分小组进行风车模型的搭建,学生根据书本的搭建步骤搭建风车或自己设计搭建风车。教师巡视,当学生在搭建过程中遇到到问题时,引导学生分析问题、解决问题。 3、当各个小组把竞赛车搭建好之后,开始教学编程。这只是编程的一个参考,这点要和学生说明。让学生知道编程可以有个性的发挥空间。教师在投映仪上打开BDS编程界面,把永远循环模块从控制模块中拖至主程序下,然后再从执行模块菜单中把直行模块纳入永远循环模块下。接着分别拖入转弯模块(设置右转)、直行模块、转弯模块(设置左转)、直行模块、停止电机模块、延时等待模块,然后分别设计它们的对话框属性,设置参数值。这里也要继复习减速马达的正转与反转的原理,并继续复习直行模块、转弯模块的默认与主控器的连接端口与默认马达端口输出的正转方向与反
开展通用技术选修课简易机器人制作的教学实践与探索p
学校论文 开展通用技术选修课“简易机器人制作”的 有效教学实践与探究 安徽省阜阳第一中学李亚东 [摘要] 通过通用技术选修课”简易机器人制作”的教学,激发了学生学习兴趣、通过在“做中学”、“学中做”的教学方式,以及突出以学生是学习的主体,有效的学习必须建立在学习者自身的主观能动上,这是学习或教学当中的一个最根本的问题。同时要发挥教师的主导作用,在课堂上有效的时间内培养了学生的动手能力、创新能力,如通过同学小组间的机器人的竞赛,增强的学生的合作意识,培养了学生的团队精神,以及对科技的兴趣。对于全面提高学生的综合素质大有裨益,特别在技术素养方面。从而达到课堂的有效教学效果。 [关键词] 激发培养做中学学中做合作主体有效教学 在加强学生素质教育、培养学生学习兴趣、动手能力、自我学习能力、创新能力以及与国际素质教育接轨的背景下,以及最近几年来,国内省级的、国家级的,以及国际的FLL、VEX大赛,机器人各种竞赛活动如火如荼的开展着,而我市这一块才刚刚起步,我校在这一块也开始了通用技术选修课简易机器人制作的有效教学实践与探索。 简易机器人制作课程现今仅作为通用技术选修内容,简易机器人的制作本身有很强的实践性、趣味性、开放性,结果的多样性,学生感兴趣的往往是最终制作出的各式各样机器人作品。由于受限于机器人系统的知识结构体系,机器人本身涉及的知识较多,且对学生而言较难掌握,加之不同的学校设备器材采购有限,不可能满足每一个学生动手操作实践的需求。那么如何在课堂上进有有效、高效的教学,让学生快速入门,并掌握大量的复杂的有很深的相关知识,是摆在我面前的一个难题。目前我校乃至我校教学这一块尚处空白,怎么办?就这一块,我从开展通用技术选修课简易机器人制作作为切入点,做了一些课堂的有效教学实践与探究。 (注:从我校去年选拔优秀学生首次参加全省的青少年机器人比赛,其中
钢琴入门:汤普森简易钢琴教程
钢琴入门教程:小汤(汤普森简易钢琴教程》 《小汤》的学习目的是:通过对中央C附近的音符进行反复认音练习,掌握五线谱基础知识,并将线谱与键盘有机地联系起来;通过数拍子,培养正确的节奏感。为下一步的学习打下一个良好的基础 第一册涵盖的音域有意识地作了限制。只介绍中央C以上的五个音和以下的五个音,时值也从全音符到四分音符为止,不再扩展,这样就有可能包括许多以复习形式出现的曲例,不必另找补充教材。总之,本教程的每一册课本都保持各自的完整性,都有各自的书写练习、视谱练习和复习曲目,在以后的各册中还将增加技巧练习。 伴奏: 书中大部分曲例,配有供教师和家长用的伴奏谱。它们都经过精心的创作,使那些简易的小曲听起来尽可能像结构庞大的乐曲的片断。这样做有很多好处,不仅有可能用不同的调弹奏,避免总是徘徊在C大调上,令人生厌;而且可以用自己严格的速度和鲜明的节奏对学生施加影响,特别是他们在弹奏中带有充满活力的节拍重庆,能使学生一开始就“感觉”到节奏的存在。 第一册:《约翰.汤普森简易钢琴教程一》 A 音符节奏:(图 1) (图2) B 音域:中央C为中心,上下五个音(见图2) C 节拍:4/4 、2/4、 3/4 D 调性:C调 重点:主要以认识五线谱、手指编号,一拍二拍三拍四拍音符组合。 《小汤1》: 1.严格地只在白键上弹奏。 2.在附点前较早引入了切分节奏(《雷格泰姆舞》、《弗吉尼,我的故乡》、《摘棉花的老人》、《我的忧愁谁知道》) 3.三拍子的巧妙进入。《小矮人进行曲》紧接《小矮人舞曲》。 4.逐渐增加手指数量。 第一学时
内容:从钢琴键盘至练习题 本课时的知识点:1.音名、五线谱、全音符、二分音符、四分音符、中央C 2.钢琴键盘、基本弹奏姿势、基本手型 本课时的重点:1.中央C在五线谱与钢琴键盘上的位置、四个音符的不同形状及时值 2.正确手型中手指支撑与手腕放松的平衡感觉 本课时的难点:1.音符时值在弹奏中的把握、唱名与音名的本质区别 2.大指弹奏中央C的正确手型 练习把握:1.反复确认键盘上中央C在高音谱表与低音谱表上的不同位置、 2.四个音符长短时值的练习:我采用一个比喻方法,叫数苹果法,具体做法是,在一个相同距离内(比如学生放在钢琴上的书的长短为例)学生拍一下,嘴数一拍,节拍器响一次等于手拍一下的时间,而我就告诉他们,拍一次一个苹果。这个方法对于年龄小(4-5周岁,下同)的初学学生掌握拍子、用节拍器练习节奏非常适用。 3.大指弹奏中央C时虎口的开度、手指支撑时力的均衡。 时间安排:各年龄段不同,我这里以年龄小的学生为例。开始每天以15-20分钟为基点,然后循序渐进逐步增加时间。 第二学时 学习内容:火车、玛丽有只小羔羊、海军工兵、伞兵。注:1.年龄小的学生,可把内容分为两次上课和练习。2.根据学生的心里特点,老师可把课本内容顺序做一定调整,便于学生集中学习和记忆。 知识点:1.高音谱表D、E音名的位置、低音谱表B、A音名的位置 2.键盘上D、E、B、A的位置 3.左右手2、3手指在键盘上的站立练习 4.曲子四拍子、三拍子中强拍的弹奏 重点:1.高音谱表、低音谱表中新学音名的位置 2.键盘上新学音名位置的确认 3.左右手2、3指断奏练习的力量感觉
钢琴入门教程之手指操
钢琴入门教程之手指操 钢琴入门教程之手指操 如何提高儿童的兴趣,是当今幼儿钢琴教学中的一个难题.下面就钢琴入门教程中手指操的相关知识点传授给大家,希望对你们有益。 一手臂放松操 面对钢琴零起点的孩子,在开始正规的课程之前,我总是先让他们信识身体的哪一部分是手臂,手臂可以怎样活动,怎样才能找到手臂 的重量,重量又是如何落下.于是编了以下三节手臂放松操,由易到难,邮简到繁,让孩子们在游戏中轻松愉快地认识了手臂以及手臂在演奏 钢琴时的规范动作.为钢琴演奏的第一步"非连音的弹奏"学习做好了 准备. 1.手臂放松的练习 通过长期观察,我发现孩子们在弯腰的时候比站立时更容易找到 手臂放松的感觉,于是编了以下的练习操,让他们看着自己的手臂放 松的甩动,在教他们认识手臂的同时也找了手臂的重量. "大象甩鼻子:小朋友们请站好,两腿稍微分开,距离与肩宽.弯腰 九十度,手臂放松垂直.手臂像大象鼻子一样,左右服起来. 2.手臂用力的练习 通过前一节前一节"手臂放松操"的练习,有朋友们能够在弯腰的 状态下顺利地找到手臂的重量.此时马上站立起来做以下的第二节操,还象前一节那样前后服甩动.把刚才的整党带过来,就能比较方便的 找到站立状态下的手臂重量.随着摆动幅度的加大,小朋友们还能体 会到重量的由小到大,由轻到重,在找到重量的同时学会如何运用,为"非连音的弹奏"打下扎实的基础.
"小猴荡秋千"小朋友们请站好,两腿稍微分分开,距离与肩宽.两个手臂同时向前后摆动,就象小猴在荡秋千一样越摆越大,越甩越高. 3.手臂协调的练习 第三节操"手臂放松操"可以有多种练习方法:单干手向前甩动,单手向后甩动,双手同时向前甩动,双手同时身后甩动以及双手反向甩动. "荷兰大风车"小朋友们请站好,双手顺时针甩手臂,双手逆时针甩手臂.右手顺时针甩手臂,左手逆时针甩手臂,做两个荷兰大风车. 能过以一一系列的练习,小朋友们已经完全了解手臂的重量,能够熟练地运用重量,并且在用力的同时能够感觉到腰部的支持和身体的平衡,身体的协调能力也得到了很大的锻炼. 二五指练习操 通过第一部分三节操的训练,小朋友们已经能够在弯腰和站立的状态下顺利地找到手臂的重量,并能放松自如的运用,可以说这是个很好的开始.现在我们要训练坐着的状态下找到手臂的重量,让这个重量完全放松,自然地掉在大腿上.这样就可以非常方便地把手臂的重量掉在钢琴上了. 1.手臂重量垂落的练习 在做这个练习时要注意检查坐姿是否端正,手臂弯曲的角度和手掌的方向是否正 确.手臂重量掉在腿上时,是用手腕落下而不是手掌拍打. "宝宝抱大熊"请小朋友们坐在琴凳上,双脚放平,自然分开.两个手臂慢慢抬起,与肩同高,做抱大熊的姿势.手掌向下,手臂自然垂落在腿上.重复抬起--落下的动作. 2.手指关节的练习 为了让小朋友们在弹钢琴时能够拥有比较漂亮的手型和比较独立的手指,需要一些手掌肌肉和手指各关节的练习.此时可以做以下的
简易机器人设计制作活动方案
简易机器人设计制作活动方案 发布者:章初发布时间:2012-2-12 20:00:23 [设计思路] 机器人科学知识是一项很适合在少年儿童中开展的,并深受学生喜爱的活动项目。机器人制作兴趣小组活动意在培养学生对机器人的兴趣,让学生了解和掌握机器人是如何感知光信号的;学习LOGO语言,学会会编写简单LOGO程序指挥机器人做预定动作,并利用所掌握的知识和技能制作出沿轨迹行走机器人。 活动采用分组合作研究制作方式,小组成员分工协作(2人一个小组)。教师作为活动的组织者,充分调动学生参与活动的积极性,注重培养每一个学生的科学思维能力;活动设计始终以学生为主体,有意识的进行多学科的融合与渗透,使活动具有综合性,从而培养学生良好的科学素质。 [活动目标] 1、组装富有个性的机器人; 2、学会编写程序,调试并运行机器人程序; 3、运用乐高机器人套件设计、制作自己的轨迹机器人,并进行比赛。 4、在活动中提高学生的观察、分析、动手、创造能力,培养他们的参与、竞争、实践、协作意识。 [活动对象、时间] 对象:初中学生8—10人 时间:1、利用暑假时间组织夏令营活动。 2、每周六上午进行兴趣小组活动。 [活动内容] 拼装乐高机器人,编写程序,调试机器人运行。 [活动方法] 演示、讲授、讨论、实践操作、小组合作
[活动准备] 一、9797 蓝牙套装(已有) 二、9648 蓝牙配件套装4套每套价格1350.00 三、9698 FLL(智能交通)价格1980.00 四、赛台(自制) 赛台的内部尺寸长为1143mm、宽2362mm,四周装有边框,高为100mm,如图所示。边框内侧为黑色,所有外侧和内侧边框均采用防火板。
钢琴初学者基本教程
一,钢琴的基本指法 大致分为这五种基本指法 1、一对一最最基本的是一个手指头正对着一个键盘。五个手指就对应do、re、mi、fa、so五个音 2、穿指,或“拇指潜移”,也有人叫它“钻山洞”,就是1指从2指或3指或4指下面穿过,去弹奏更高的音的指法。穿指有一些规则。 ①只能用1指去穿,而且只能穿2,3,或4指,不能穿5指。穿5指是忌讳的。另外,1穿2和1穿3的场合比1穿4要多一些 ②如果2、3、4指在白键上,那么1指在穿指后不可以落到黑键上。否则就是别马腿,大家可以试一试。这是要说一下,1指由于其生理构造,不太适合经常上黑键。但它在相对少数的一些场合还是需要上黑键的。但是一定要在顺手的情况下才可以。 ③穿指跨度不要太大,要尽量避免穿4度以上的距离。什么是4度?从do到fa 的距离就是4度。可以试试,如果2、3或4指在do上,然后用1指穿,穿过去后落在so或者la上,一定会是很不愉快的。 3、跨指,或“跨越拇指”,就是2指或3指或4指从1指上面越过,去弹奏更低的音的指法。跨指有一些规则。 ①只能去跨用1指,跨其它指头是忌讳的,比如说4指跨5指是禁止的。而且只苡?,3,或4指跨1指,不能用5指跨1指。另外,2跨平台和3跨1的场合比4跨1要多一些。 ②如果1指在黑键上,那么2、3、4指在跨指后不可以落到白键上。否则就是别马腿,大家可以试一试。 ③跨指跨度不要太大,要尽量避免跨4度以上的距离。 4、括指,又叫手指的伸展,是指把手指横向张开,要触键的两个手指与它们之间的手指数的总和小于要触的两个键盘的音程数的指法。 上行的时候叫括指,下行的时候呢,还叫括指!而且括指不局限在 1 指上。 ①任何两个指头都可以括指。当然了,1 指和其它指头括得最多。4 指和 3 指、 4 指和 5 指用得少喽。 ②白键和黑键都可以括。当然了,括的时候要保证弹奏的方便。 ③当我们知道下面该括的时候,要提前准备,不要等弹到前一个音了再抓瞎准备后一个音。 ④如果不需要伸展很大的程度,就不要自找别扭。比如,弹 do、高音do、do 的时候,明明能用 1 指、5 指、1 指,就不要用 1、2、1。 ⑤括指由于不需要来回地翻来翻去,所以比穿跨指方便一些。但是!如果要连续上行或下行六个以上的音,就别再拧着宁括不穿了。要灵活一些。 5、缩指,又叫手指的收缩,是指把手指横向紧缩,要触键的两个手指与它们之间的手指数的总和大于要触的两个键盘的音程数的指法。 ①任何两个不相邻的指头都可以缩指。不过,相邻的两个手指肯定不会构成缩指。但可以构成扩指。看,二者并不是百分之百对应。
机器人制作教程
两年前,爸爸给我买了套机器人组合套件,希望我在进入小学高年级之前掌握基本的机器人知识。去年暑假爸爸辅导我阅读《简易机器人制作》(江苏教育)一书,开始学习认识机器人,掌握初级的计算机控制和简单的机械知识。这个寒假我利用所掌握的知识,在爸爸指导下,开始实际制作一个简单的完整模型——智能机器人小车。 一、小车功能介绍 智能机器人小车可独立完成4个功能: 1、小车碰壁拐弯——小车在行进过程中碰到障碍物倒退拐弯并继续前行; 2、小车悬崖回头——小车在浅色水平桌面行进,探测到行进方向是桌子边沿时停步并转弯回头; 3、小车边走边唱——小车在行进过程中播放音乐; 4、小车走8字——小车按照8字的形状行走; 二、设计思路 最初爸爸找到一个类似范例,但由于结构件不同,而且没有源程序,我们参考了这个范例的结构和功能,经过独立思考,多次实验调测,完成这个小车的制作。 1、确定任务 依照不同程序,能够分别使小车完成碰壁拐弯、边走边唱、悬崖回头和走8字。 2、确定总方案 根据任务确定智能小车所需完成的动作,小车需要具备探测障碍物、探测桌面边沿、以及相应需要完成的前进、后退、拐弯、唱歌这些动作。 3、结构设计
结构设计成有两个电机分别控制两个后轮,前轮使用一个万向轮,另外需要一个接触传感器和一个双光反射传感器。结构上需要将接触传感器触点放在小车最前端,双光反射传感器设在接触传感器稍微靠后的位置,面向地面,距地面8-10mm。结构设计中的难点是万向轮很容易卡住,连接线不够长影响控制板安装位置。 4、控制电路设计 控制电路要设计成让传感器(接触传感器、光反射传感器)判断有没有信号,然后确定两个电机正转或反转,实现小车前进、后退和拐弯这些动作。 5、控制软件设计 软件设计首先需要制定机器人控制的输入输出分配方案: 根据所要完成的任务,绘制出控制软件的流程图草案,并最终完成软件程序流程。 6、组装调试 根据设计安装好小车,并将完成的程序写入主控制器中,然后让它试运行,再找出结构或程序的问题,不断的调试,直到将问题解决。 三、制作总结 制作成功这个智能机器人小车,我感觉很有成就感。这个制作加深了我对计算机控制基本知识的理解,激发了我继续深入学习机器人制作的兴趣。在现有小车的结构下,我还将编写新的控制程序,完成小车的第五个动作——沿黑线轨迹行走,并且进一步通过学习子程序的调用,把小车的五个动作集合到一起,通过接触传感器预先设定,完成不同的动作。未来还计划把这个小车改装成一个服务机器人,可以在不同的指定位置拿水杯、倒水和放杯。 附录一、智能机器人小车外观介绍
钢琴基础教程,最经典钢琴入门教程
第十八课本教程由牛津爱乐钢琴节奉献练习要求:以下的每个学习环节,请做到清楚要求,掌握应学的知识和技巧再进入下一环节的学习,不可走马观花。每一首乐曲的练习都要采取很慢的速度进行,只有在慢速的练习中才能更好地注意手型、避免错误。翻到课本第三十八页,乐曲《牛仔之歌》是一首复习前面所学知识的曲子,首先请注意乐曲的调号,要记住,这首乐曲中的si(B)要降低半音。在开始练习之前我们要有这样的习惯,先细心地把乐曲看几遍。看看曲子中有什么特点。这样练习起来可以避免错误。记住这首乐曲要分手分段练习,乐曲分成两段,第一段从第一小节(只有一拍)到第十七小节。其余的为第二段。具体就是先分手练习第一段,分手练好了两手合起练好第一段,然后再进入第二段的分手练习?6?7?6?7 第五、九、十三、十七小节中两手都是休止符的拍子要注意休止正确的时值,有的学生会漏掉这些休止的拍子。第八、九小节中的si(B)有还原记号,不用降,其它的si(B)都要降。乐曲中没有连线的音用断奏,有连线的音用连奏,有点的音用跳音弹奏,这些都要清楚表现。弹出自信、活泼的感情出来。请按照示范乐曲的速度弹奏:《牛仔之歌》:《牛仔之翻到课本第三十九页,我们来学习《小雷格泰姆》,这是一首切分音节奏的乐曲。注意弹出切分音节奏“弱强-弱”的特点出来。乐曲中左手的跳音要弹得轻巧,注意休止
符的时值要准确。请按照示范乐曲的速度弹奏:《小雷格泰姆》翻到课本第四十页《假日之歌》,这是我们接触的第一首三个升记号的乐曲。升的是f(fa)、c(do)、g(sol),这是a 大调的调号,要记住要升的三个音,避免在弹奏时忘记了。练习乐曲之前先练习一下“预备练习”和a 大调的音阶,通过预备练习我们可以熟悉乐曲的左手和弦音型,通过音阶的练习我们可以熟悉右手的手位。注意每一乐句的大连线,要求我们用连奏来弹奏,但是连线与连线之间就要用断奏了,手要拿起来,就象说话的呼吸一样。注意乐曲的力度记号的表现。mf、mp、渐强、渐弱要表达好,让别人听到你的弹奏就能感受到力度的变化。十三小节的延长记号要注意,这里弹成三拍就好了。左手虽然没有要求连奏,但这里还是要用连奏比较合理,也比较容易。翻到课本第四十一页的《走,走,走》,乐曲中出现了一种新的拍号:六八拍子。什么意思呢?首先我们要知道拍号是由上下两个数字组成的,上面的数字的意思就是每小节有多少拍,下面的数字就是以多少分音符为一拍。因为我们学过的拍号有二四拍子、三四拍子、四四拍子,下面的数字都是四,就是说都是以四分音符为一拍的,而我们这节课学的是六八拍子,下面的数字是八,所以就是以八分音符为一拍,那么我们知道八分音符的时值是四分音符的一半,所以在六八拍子中音符的拍数就要算多一倍了。看看课本里
钢琴入门教程课自己整理
钢琴入门教程(第一课) 一、学学坐姿 首先,一开始要先学好正确的坐姿。坐的姿势以自然,端正,有利于弹奏为原则,不要僵硬,紧张,或过于松懈。 身体的重心要依靠臀部和脚尖支撑。一般来说,弹奏者只应坐到标准琴凳的三分之一左右的地方,不要把座位都坐满,或把身子靠在椅背上(标准的琴椅都是没背可以靠的啦)。因为这样才能让我们在弹奏时身体能自然地左右摇摆延伸。上身直立,腰不要塌陷,这样,弹奏者可以从腰或者更下一些部位用上力量,上身略向前倾,使重心略靠前,便于将力量向前传送至手指。建议弹琴要采用标准的琴椅,不要采用其它类型的椅子。 座位的高低,要根据弹奏者的高矮来决定,原则是肘,前臂,手,手与键盘保持一个相同的水平高度,或略高于键盘。身高不够的学生要应将琴凳垫高使到符合上面提到的原则。 座位的远近,也要视弹奏者的胳膊的长短来决定,要使在弹奏时,胳膊可以自如的移动。一般说,就是膝盖刚好对齐钢琴最接近演奏者的地方。脚的位置,一般可以放在踏板附近,这个位置比较适合于演奏,也有利于使用踏板。身高不够的学生因为琴凳垫高使到脚不着地,应该用小凳子垫脚。 二、初步认识五线谱 初步认识五线谱初步认识五线谱初步认识五线谱经常有人这样问我:“五线谱是不是很难学啊?”其实并不难,而且很容易,因为我们并不需要一下子就全部把它学完,我们只需在学钢琴的过程中跟着一点点地学习。所以下面我也不用讲很多,只是说一下最开始的时候应该知道的。在以后的学习中我们再“碰到什么学什么”。 1.找到钢琴上的中央C,请看看课本第四页。 2.翻到课本第六页和第七页,学习有关的五线谱知识。在这两页我们应该掌握的知识是什么是全音符、数多少拍?什么是高音谱号、什么是低音谱号?中央C记录在乐谱的什么地方?什么是小节和小节线?记住十个手指的编号。 三、开始弹琴啦 翻到课本第8页,下面我们就开始了学琴的第一首乐曲,这首乐曲很简单,就是四个全音符的中央C,在弹这首乐曲的时候我们应该采用“全臂断奏法”来进行演奏。
简易机器人的基本动作与发声
《简易机器人的基本动作与发声》教学设计 一、教学内容分析: 通用技术选修模块“简易机器人制作”第三章第五节《简易机器人的基本动作与发声》(地质版)主要在学生掌握了机器人基本运动原理后,开始学习如何使用电机运动语句和电机停止语句实现对机器人的运动控制。本节是学生有通用技术课理论部分进入具体技术实践的起始,对于学生真正了解通用技术的意义具有重要作用,也是激起学生兴趣的一节课程。通过对本课学习使学生开始实践、敢于实践。教材中在简单明确基本行走动作需要控制的电机及其基本动作形式后,进入控制语句介绍部分,首先是电机运行语句指明标准语句格式同时对具体参数内容进行列表说明,“做一做”明确了实践操作步骤以及演示结果,通过对程序的分析加深学生的理解(电机停止语句和发声语句的学习部分教材结构与电机运行语句基本同)。“操作与思考”将知识进行延伸和扩展。教材其中插入了一项综合程序---走近似四边形。经过一节课的训练,最后“讨论交流”“技术实习”内化学生运用知识的能力,巩固本节课程内容。 二、教学对象分析: 高二年级学生通过高一对通用技术课程必修部分的学习,具有进行设计制作过程的基本素质和能力。通过本学期在前面课程的学习对机器人基本动作原理有所掌握,认识到机器人的各种动作以及功能是通过编程来实现的。其中个别学生具有计算机编程基础,但大多数学生还没有基础过语言编程,而且学生的动手能力不同,所以在教学的过程中要注意从基础开始,由教师指导进行操作,掌握操作基本步骤后通过自主的探究活动,进一步理解编程语言的内在含义并进行灵活应用。 三、教学目标
1.理解机器人运动的原理。学会电机控制和发声语句。 2.编程训练使学生的思维的逻辑严谨 3.使学生在探索中促进知识学习。在活动中通过自主学习、合作探究,提高解决实际问题的能力、团结协作能力以及表达的能力。 教学重点:机器人对简单程序的执行。 教学难点:是机器人达到预期执行效果。 四、教学策略及媒体运用 在教学过程中强化《技术与设计2》中的设计的一般流程以及评价过程。通过语句的学习以及实践操作消除学生对简易机器人制作的陌生感,熟练简易机器人制作的熟练性,通过边学习边实践边讨论的方式,促进学生对知识的理解和掌握。给学生创造探究性学习的机会,激发学生的学习兴趣以及探索精神。 五、教学准备: ⑴Pallbo教学机器人 ⑵机器人教学平台(实验室计算机,电工工具等) 六、教学过程:
钢琴初学者基本教程
钢琴初学者的教程 一,钢琴的基本指法 大致分为这五种基本指法 1、一对一最最基本的是一个手指头正对着一个键盘。五个手指就对应do、re、mi、fa、so五个音 2、穿指,或“拇指潜移”,也有人叫它“钻山洞”,就是1指从2指或3指或4指下面穿过,去弹奏更高的音的指法。穿指有一些规则。 ①只能用1指去穿,而且只能穿2,3,或4指,不能穿5指。穿5指是忌讳的。另外,1穿2和1穿3的场合比1穿4要多一些 ②如果2、3、4指在白键上,那么1指在穿指后不可以落到黑键上。否则就是别马腿,大家可以试一试。这是要说一下,1指由于其生理构造,不太适合经常上黑键。但它在相对少数的一些场合还是需要上黑键的。但是一定要在顺手的情况下才可以。 ③穿指跨度不要太大,要尽量避免穿4度以上的距离。什么是4度?从do到fa 的距离就是4度。可以试试,如果2、3或4指在do上,然后用1指穿,穿过去后落在so或者la上,一定会是很不愉快的。 3、跨指,或“跨越拇指”,就是2指或3指或4指从1指上面越过,去弹奏更低的音的指法。跨指有一些规则。 ①只能去跨用1指,跨其它指头是忌讳的,比如说4指跨5指是禁止的。而且只苡?,3,或4指跨1指,不能用5指跨1指。另外,2跨平台和3跨1的场合比4跨1要多一些。 ②如果1指在黑键上,那么2、3、4指在跨指后不可以落到白键上。否则就是别马腿,大家可以试一试。 ③跨指跨度不要太大,要尽量避免跨4度以上的距离。 4、括指,又叫手指的伸展,是指把手指横向张开,要触键的两个手指与它们之间的手指数的总和小于要触的两个键盘的音程数的指法。 上行的时候叫括指,下行的时候呢,还叫括指!而且括指不局限在 1 指上。 ①任何两个指头都可以括指。当然了,1 指和其它指头括得最多。4 指和 3 指、 4 指和 5 指用得少喽。 ②白键和黑键都可以括。当然了,括的时候要保证弹奏的方便。 ③当我们知道下面该括的时候,要提前准备,不要等弹到前一个音了再抓瞎准备后一个音。 ④如果不需要伸展很大的程度,就不要自找别扭。比如,弹 do、高音do、do 的时候,明明能用 1 指、5 指、1 指,就不要用 1、2、1。 ⑤括指由于不需要来回地翻来翻去,所以比穿跨指方便一些。但是!如果要连续上行或下行六个以上的音,就别再拧着宁括不穿了。要灵活一些。 5、缩指,又叫手指的收缩,是指把手指横向紧缩,要触键的两个手指与它们之间的手指数的总和大于要触的两个键盘的音程数的指法。
简易机器人设计制作精彩活动方案设计设计
简易机器人设计制作活动方案 [设计思路] 机器人科学知识是一项很适合在少年儿童中开展的,并深受学生喜爱的活动项目。机器人制作兴趣小组活动意在培养学生对机器人的兴趣,让学生了解和掌握机器人是如何感知光信号的;学习LOGO语言,学会会编写简单LOGO程序指挥机器人做预定动作,并利用所掌握的知识和技能制 作出沿轨迹行走机器人。 活动采用分组合作研究制作方式,小组成员分工协作(2人一个小组)。教师作为活动的组织者,充分调动学生参与活动的积极性,注重培养每一个学生的科学思维能力;活动设计始终以学生为主体,有意识的进行多学科的融合与渗透,使活动具有综合性,从而培养学生良好的科学素质。 [活动目标] 1、组装富有个性的机器人; 2、学会编写程序,调试并运行机器人程序; 3、运用乐高机器人套件设计、制作自己的轨迹机器人,并进行比赛。 4、在活动中提高学生的观察、分析、动手、创造能力,培养他们的参与、竞争、 实践、协作意识。 [活动对象、时间] 对象:初中学生8—10人 时间:1、利用暑假时间组织夏令营活动。 2、每周六上午进行兴趣小组活动。 [活动内容] 拼装乐高机器人,编写程序,调试机器人运行。 [活动方法] 演示、讲授、讨论、实践操作、小组合作 [活动准备] 一、9797 蓝牙套装(已有)
二、9648 蓝牙配件套装4套每套价格1350.00 三、9698 FLL(智能交通)价格1980.00 四、赛台(自制) 赛台的内部尺寸长为1143mm、宽2362mm,四周装有边框,高为100mm,如图所示。边框内侧为黑色,所有外侧和内侧边框均采用防火板。 五、竞赛场地纸(市赛、省赛前购买)价格大约2000 六、台式电脑3台 七、笔记本2台(比赛时用) 八、储物箱,储物柜 九、活动室
拜厄钢琴基础教程指导分析
拜厄钢琴基础教程指导分析 第一节课 正确的坐姿: 养成良好的坐姿是至关重要的,坐的位臵应该在琴键的正中间, 也就是正对中央C的位臵,椅子与琴的距离大约与小臂的长短一致 臂部坐在琴凳的二分之一处。不要太靠里,也不要太靠外,臂部成为 一个支撑点,双脚自然,平稳地放在踏板前,上身须坐正,保持平稳, 不能弯腰驼背,椅子必须调到适当的高度,以肘部,腕部与键盘基本 持平为宜,上手臂与小臂形成一个略大于90度的纯角即可,双臂自然 垂下,呼吸平稳,全身放松,体会一下从头,脖子,腰,背,肩,手腕,手臂,手指全部畅通无阻的感觉。 正确的手型: 手的姿势应成圆弧形,手腕应略微比手掌低一点。手指关节要保持稳定,手掌不向内凹。大拇指应略微向内弯曲,与二指保持一定距离。大拇指弹奏时要用指端外侧触键,但面积不要太大,第一关节不要碰到键面。小指应立起来,用指尖的肉触键,手指的第一关节不要塌。 第二节 第二节课 单手与双手的触键练习 (1)每一个手指下落触键时,前一个已触键的手指应立即抬起离键。 起,落两个动作应同时完成。 (2)手指触键要平稳,扎实,用力均匀,切忌用力过猛,过分用力 会使手与手指的肌肉处于紧张,僵硬的状态,造成弹奏粗重,笨拙。 生硬,不利于进一步地学习 刚开始练习时,可以用很慢的速度弹奏,每一条练习按照教师的要求 反复多次。 对于初学者来说,在这个阶段的练习中,可以采取断奏和非断奏两种 方法来练习。 断奏:训练手臂放松,保持良好的手型和手指的支撑。按照谱面的音高 和指法自然地抬起手臂,手指应保持自然弯曲状,臵于琴键上方谱架的 位臵,然后让手臂放松,毫不用力地掉下,用已准备好的手指,稳稳地 支撑在琴键上,其余的手指和手臂保持自然放松,手掌不要塌。 非连奏:每当一个手指触键时。前一个已触键的手指应立刻抬起,高抬 指不仅可以训练手指的肌肉与骨骼,也能增强手指的独立性。考虑小朋友的肌肉和骨骼均未发育成熟,尚不能完全胜任强有力的弹奏,所以开始阶段幼儿用断奏方法练习会比较适合。
简单机器人设计原理
智能机器人设计概念 现在的科学技术突飞猛进,尤其是在计算机这方面得到了更快的发展,人们在计算机这方面做出大量的科学成果,计算机的处理能力增强和处理速度变快,当然,现在人们主要是倾向去研究计算机的智能性,那么,我们要求的是计算机的处理能力强、处理速度快、处理智能化和耐用性能好等,当然了,计算机的这些处理是为了给我们带来更高的经济效应和生活质量的提高。 在计算机不断地更新使得计算机的智能性凸显而出,而智能机器人则是计算机的一种表现形式,智能机器人的处理能力以及表现形式都是按照计算机的设计观念来设计出来的,当然了,智能机器人更比较具有自主能力,因为智能机器人相当于是将一台计算机安装了很多具有一定功能的器官,就像人的各种外部器官使其在处理过程中发挥相应的作用,而各种器官所发挥作用是靠人大脑的支配来完成的,当然,智能机器人的各器官主要取决于处理器。那么从现在的智能机器人来看的话,它的设计概念就是一种特殊的计算机,可以说是一种表现性的计算机或应用型计算机。对于智能机器人的设计当然是要处理能力强即是处理范畴广、处理速度快、处理智能化以及耐用性能好等要求,虽然是这样的设计理念,但是实现起来并非那么的容易,那么从现在的机器人来看的话,他们和人之间的差别表现在哪些方面呢? 机器人的动作表现的离散性。什么是离散性?在数学中,它表现得是不连续,是一种跳变的函数,如下图一 )(t s()t L t t 图一图二 从上面图一可以知道,是一个关于t时间函数,在一定连续的时间区间里,函数值()t s不连续的,那么我们把这种函数称为离散函数,如果说时间变量和函数值都是离散的,那么这种函数所表现出来的在信号上可称为数字信号函数,当然对应的是如果在时间和函数值都是连续的这种信号叫模拟信号函数。 在上面介绍了离散这个概念,如果说是在动作上的话,我们只需要清楚它的动作是不连贯的就行了。想必大家都看过机器舞吧,正是因为那些动作表现得不是很连续,所以才叫它机器舞,首先得动作表现上是有限的,还有就是动作不连贯,比如说太极,当然了,有的机器人是能够打太极的,关键是在动作上的表现都是靠程序代码来实现的,而代码并不是无限的几乎每一条代码都是靠人工写上去的,不可能我们能够把所有的代码都能够写上去。还有就是机器人的结构是人设计出来的,在制作方面也处在很大的缺陷,并且在一定时间里不能自动的更新自己的骨架,人是生物,是由智慧的生物,堪称是完美的物种,无与伦比。人类能进行新陈代谢而使得人不断的在身体方面得到更新,而我们却不知道这种更新过程。当然,人还可以通过神经调节来更新自己,这一点的话机器人是能够做到的。
简易机器人制作校本课程实施
简易机器人制作校本课程实施 李凤兰李龙王培栋孙海燕何代华 (顺义牛栏山第一中学) 一、课程的实施背景 (一)理论要求 国家的发展离不开科学技术的进步和人才素质的提高,在中学阶段,加强科技教育,整体提升青少年科技素养至关重要。《国家中长期教育改革和发展规划纲要(2010-2020年)》工作方针指出:“要以学生为主体,充分发挥学生的主动性,关心每个学生,为每个学生提供适合的教育”。为了响应国家号召和实现牛栏山一中“培养特长突出、富有创新精神的优秀中学生”的育人目标,需要有更贴近学生探索、实践、创新发展的科技类课程,而简易机器人制作模块由于具有综合性、实践性强等学科特点,非常适合对其课程资源进行进一步整合利用。 (二)实践要求 学校位于北京市远郊的顺义区牛栏山镇上,是示范高中、北京市科技示范校,95%的在校学生住宿。与市区名校相比,开展机器人教育不占优势。2003至2008年,我校逐步完成了简易机器人制作活动从起步到校本教材的编写出版和以乐高器材为主的机器人专用教室装配工作,实现了从小组教学扩大到普及型校本选修和与竞赛提高相结合的课程,积累了一定的软硬件资源,在学校中产生了非常积极的影响。 随着新课改的推行,简易机器人制作现已成为高中通用技术选修3模块,学科知识快速更新。课程的实施存在国家教材内容相对简单,现有活动器材与国家教材不配套,任课教师为兼职教师等困难。为了实现通用技术课程理念,使课程更适应学生需求,我们在现有条件下对课程内容进行了扩展和延伸并实施。 二、实施简易机器人制作校本课程的目的意义 (一)目的 1.在高中阶段参与机器人研究活动,是工程学早期人才培养的重要环节,可以为学生今后进一步学习机械设计制造、自动化、电子、程序控制等专业奠定很好的基础。 2.最终形成与学生需求相适应的校本课程,总结出经验,在中学阶段发现并培养拔尖创新人才,使学校成为机器人创新人才培养基地,最终实现与顺义区小学初中互利共赢、与高校有效对接。 (二)意义 按照高中通用技术课程标准的要求,以简易机器人制作活动为载体,以高中学生为研究对象,在校本课程实施的过程中,进一步完善学校机器人教育的平台,通过多种机器人活动,进行知识的普及与提高,进而激发学生兴趣,培养其创新精神和实际应用能力,提高科学素养。 三、简易机器人制作校本课程的实施过程 (一)编写和使用校本教材,制定课程纲要 1.编写和使用校本教材 普通高中通用技术课程标准解读——简易机器人制作指出:“简易机器人制作”涵盖了计算机、传感、智能信息处理、控制和机械等技术,体现了信息技术与机械技术的结合,体现了知识和技能的综合运用。这一模块以应用设计为主,具有思路广、用途多、实践性强等特点,能够为学生提供宽广而丰富的想象空间,有利于学生创新精神的培养和实践能力的提高。 依据通用技术课程标准、苏教版教材、乐高教材及其它相关资料,结合学科和学生特点,选取了机器人技术简介、机械结构、ROBOLAB软件编程、单片机等内容,编写并出版了《简易机器人制