基于小波变换自适应滤波方法的ECG信号消噪_张艳丽
基于小波变换自适应滤波方法的ECG 信号消噪
张艳丽1,杨仁弟2
(1.山东工商学院信息与电子工程学院,山东烟台 264005;2.烟台大学机电汽车工程学院,山东烟台 264005)
摘 要:为了减少在用小波变换方法进行心电信号消噪时所产生的心电信息损失,本文在对心电信
号进行离散正交小波变换的基础上,进行自适应滤波处理,即以具有最大QR S 波能量的尺度上的高频
细节信号作为自适应滤波器的参考输入,以噪声干扰对应的分解尺度上的 细节 分量及最大分解尺度
上的近似分量所重构的信号作为原始输入.实验证明这种改进的滤波方法可以在有效抑制心电信号中
噪声干扰的同时,较好保持心电信号的波形特征及有用的心电信息,达到较好的滤波效果.
关键词:ECG 信号;小波变换;自适应滤波;信号消噪
中图分类号:TN 914 文献标识码:A 文章编号:1000-2162(2006)06-0036-05
心脏细胞除极和复极的电生理现象是心脏运动的基础,而心电图(E lectr ocar d i o gra m,ECG )记录了心脏细胞的除极和复极过程,是心脏电活动在人体体表的表现.EC G 主要由P 波、QRS 波、T 波等组成.这些波具有不同的电生理意义,在一定程度上客观反映了心脏各部位的生理状况,因而在临床医学中有重要意义.心电信号十分微弱,经采集、放大、采样后往往被淹没在较强的背景噪声之中,其中主要的噪声来源有工频干扰、由人体肌肉颤动所引起的肌电干扰、由电极移动、人体动作和心肌兴奋所引起的基线漂移等.因此对ECG 信号进行数字滤波,消除噪声干扰是心电信号处理中的一个重要环节.
利用小波变换方法可以对心电信号进行滤波处理,消除其中的噪声干扰.常用几种方法是小波空间阈值收缩法[1]、小波变换模极大值去噪方法[2]
和去除噪声干扰对应的小波分解尺度上的细节分量
法[3].其中,第三种方法考虑了信号与各种噪声的频率分布特性,可以有效地去除心电信号中的噪声干扰.但是因为噪声与心电信号有频带重叠,在噪声干扰对应的小波分解尺度上也包含一些有用的心电信息,所以滤波会丢失QRS 波的一些有用信息.考虑到这种方法算法简单,滤波性能较好,我们在其基础上进行了自适应滤波处理,探讨减少心电信息损失的方法,以有效保持心电信号的波形特征.1 原 理
1.1 小波变换理论
[4]根据小波变换多分辨率分析理论,任意函数f (t) V 0都可以分解为任意尺度上的细节部分和逼近部分,即进行离散正交小波级数展开
f (t)=
J j=- k =- d j ,k j,k (t)+ k=- c J,k J,k (t)(1)其中,V 0为尺度函数 (t)的平移系列 k (t)= (t -k )在L (R )空间所张成的零尺度空间,即V 0=s pan{ k (t)}; j ,k =2-j 2 (2-j t -k ), j,k =2-j 2 (2-j
-t-k )为尺度函数 (t)和小波函数 (t)伸缩和平移所形成的函数系,它们分别构成各个尺度空间和小波空间的规范正交基;j ,k Z,J 为最大分解尺度;c j ,k 、d j ,k 分别为2j 尺度上的尺度系数和小波系数:c j ,k =〈f (t), j,k (t)〉、d j ,k =〈f (t), j
,k (t)〉,它们可以由M allat 快速分解算法得到.即
c j,k =
m h (m -2k )c j-1,m ,d j,k = m h (m -2k )c j-1,m (2)
收稿日期:2006-01-11
作者简介:张艳丽(1980-),女,山东济宁人,山东工商学院助教,硕士;
杨仁弟(1976-),男,山东淮坊人,烟台大学助教,硕士.2006年11月
第30卷第6期安徽大学学报(自然科学版)Journa l o f A nhu iU n i versity N atural Science Ed iti on N ove m ber 2006V o.l 30N o .6
M allat 重建算法为
c j-1,m = k c j ,k h (m -2k )+ k
d j ,k g (m -2k )(3)
对于数字信号f(n ),可以将其作为M a llat 快速分解算法中的初始输入序列c 0,k ,则(2)式表示一离散序列进行双通道滤波的过程.h(n )和g (n )为双通道滤波器组,分别具有低通性质和高通性质.它们的滤波输出分别对应于离散信号的低频概貌和高频细节.在不同尺度上进行双通道滤波就实现了原始离散信号的多分辨率分解.按照(3)式可以重建任意尺度上的信号概貌,直至原始信号,即实现离散信号的重构.
1.2 自适应滤波器
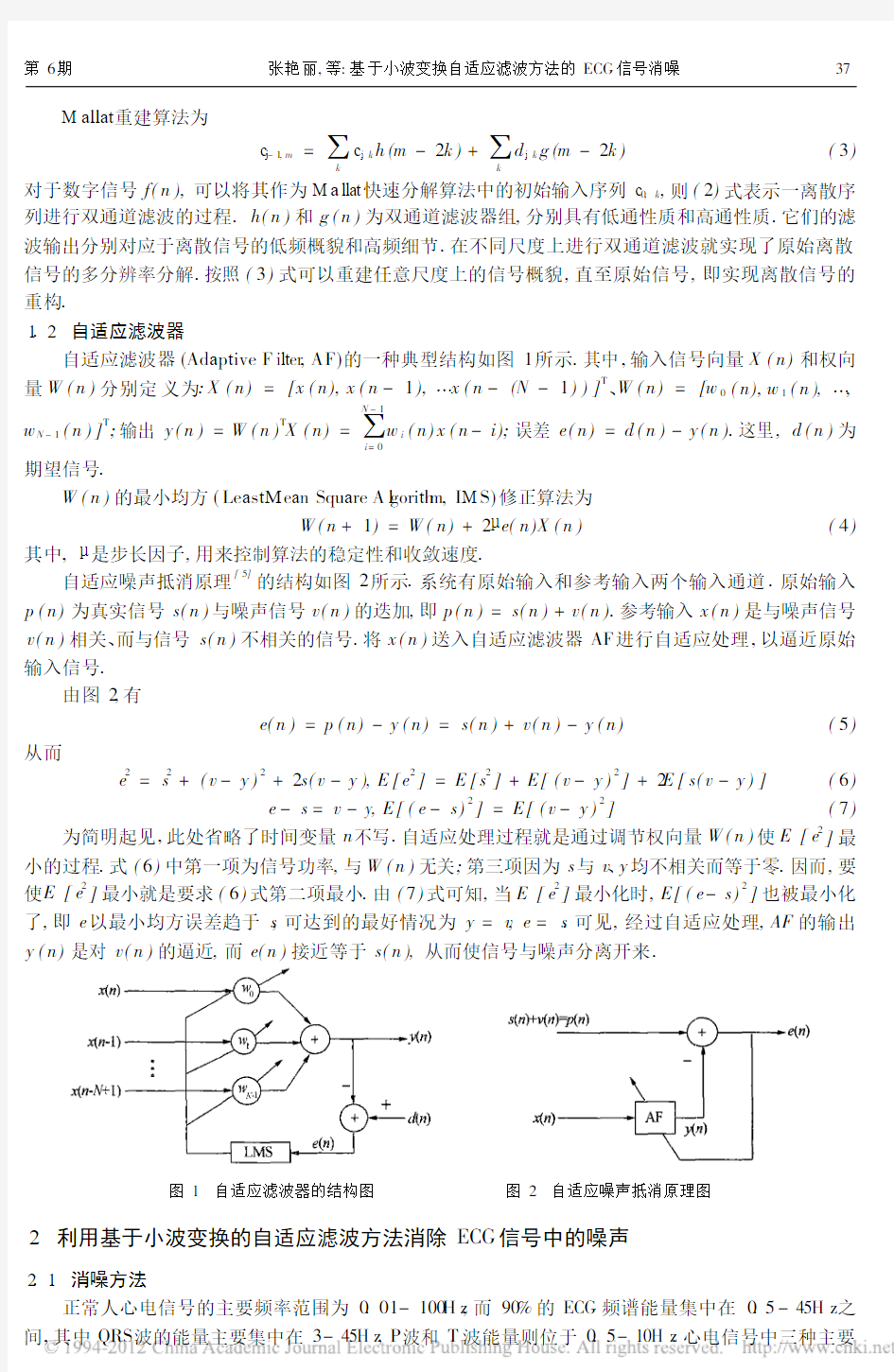
自适应滤波器(Adaptive F ilter ,AF)的一种典型结构如图1所示.其中,输入信号向量X (n)和权向量W (n )分别定义为:X (n)=[x (n),x (n -1), x (n -(N -1))]T
、W (n)=[w 0(n),w 1(n ), ,
w N -1(n )]T ;输出y (n )=W (n )T X (n)= N -1i=0w
i (n)x (n -i);误差e(n)=d (n )-y (n ).这里,d (n )为
期望信号.
W (n )的最小均方(LeastM ean Square A l g orith m,L M S)修正算法为
W (n +1)=W (n)+2 e(n)X (n )(4)
其中, 是步长因子,用来控制算法的稳定性和收敛速度.
自适应噪声抵消原理[5]的结构如图2所示.系统有原始输入和参考输入两个输入通道.原始输入
p (n)为真实信号s(n )与噪声信号v(n )的迭加,即p (n )=s(n )+v(n ).参考输入x (n )是与噪声信号v(n )相关、而与信号s(n )不相关的信号.将x (n )送入自适应滤波器AF 进行自适应处理,以逼近原始输入信号.
由图2,有
e(n )=p (n)-y (n)=s(n )+v(n )-y (n)
(5)从而
e 2=s 2+(v -y )2+2s(v -y ),E [e 2]=E [s 2]+E [(v -y )2]+2E [s(v -y )]
(6)e -s =v -y,E [(e -s)2]=E [(v -y )2]
(7) 为简明起见,此处省略了时间变量n 不写.自适应处理过程就是通过调节权向量W (n )使E [e 2]最
小的过程.式(6)中第一项为信号功率,与W (n )无关;第三项因为s 与v 、y 均不相关而等于零.因而,要
使E [e 2]最小就是要求(6)式第二项最小.由(7)式可知,当E [e 2]最小化时,E [(e-s)2]也被最小化了,即e 以最小均方误差趋于s ,可达到的最好情况为y =v ,e =s .可见,经过自适应处理,AF 的输出y (n)是对v(n )的逼近,而e(n )接近等于s(n ),从而使信号与噪声分离开来
.
图1 自适应滤波器的结构图图2 自适应噪声抵消原理图
2 利用基于小波变换的自适应滤波方法消除ECG 信号中的噪声
2.1 消噪方法
正常人心电信号的主要频率范围为0.01-100H z ,而90%的ECG 频谱能量集中在0.5-45H z 之间,其中QRS 波的能量主要集中在3-45H z ,P 波和T 波能量则位于0.5-10H z .心电信号中三种主要37第6期张艳丽,等:基于小波变换自适应滤波方法的ECG 信号消噪
噪声干扰的频域分布为:工频干扰频率固定为50H z ,基线漂移频率一般在0.05-2H z 之间,肌电干扰频率范围一般在5H z 2kH z 之间.因此对含噪声干扰的心电信号进行多尺度小波分解后,基线漂移噪声的能量大小主要反应在大尺度的小波系数和尺度系数上,而肌电干扰、工频干扰等高频噪声的能量大小主要反应在小尺度的小波系数上.另外,因为噪声干扰的频带与心电信号频带有重叠,所以在噪声干扰对应的小波分解尺度上也包含一些有用的心电信息.因此,若按照去掉噪声干扰所对应小波分解尺度上的细节分量的滤波方法进行心电信号的消噪处理,则在抑制噪声干扰的同时,也会丢失QRS 波的一些有用信息.
在这里,我们在对心电信号进行小波变换的基础上,进行了自适应滤波处理,以减少有用心电信息成分的损失.利用基于小波变换的自适应滤波方法对ECG 信号进行消噪处理的基本思路是:用离散正交小波变换对原始心电信号进行多尺度分解,以噪声干扰对应的分解尺度上的 细节 分量及最大分解尺度上的近似分量重构信号,作为自适应抵消器(如图2所示)的原始输入信号p (n );以具有最大QRS 波能量的尺度上的高频细节信号,作为自适应抵消器的参考输入信号x (n ),进行自适应滤波处理.这里的p (n )由各种噪声干扰信号s(n )及噪声干扰对应的小波分解尺度上所含有的QRS 波的部分心电信息v(n )组成,而信号x (n)与p (n )中的v(n )相关,与s(n)不相关.因此,根据上面的自适应消噪理论可知:经过自适应处理,e(n )接近等于s(n ),输出信号y (n )接近等于v(n ),即提取信号y (n)也就找回了利用去噪声干扰细节分量的小波方法滤波时所损失的心电信息
.
图3
含噪声的心电信号
图4 含噪声心电信号的小波分解结构2.2 实验仿真
采用一段采样频率为500H z 的含噪声干扰
的心电信号(如图3所示)进行实验.具体的实验
仿真过程如下:
(1)采用co if3小波对如图3所示的含噪心
电信号进行8级小波分解,得到其小波分解结构
如图4所示.图中cd1~cd8为各分解尺度上的小
波系数,ca8为28尺度上的尺度系数.根据心电信
号和噪声干扰的频率、能量分布及其小波分解结
构图可知:在尺度21、22上所分解得到的细节分量
与高频随机噪声和肌电干扰相对应,在23尺度上
分解得到的细节分量与工频干扰相对应,28尺度
上的近似分量与基线漂移相对应;
(2)去掉24~28尺度上的细节分量,即将这
几个尺度上的小波系数都置零,利用其余几个尺
度上的小波系数及28尺度上的尺度系数重建信
号,将得到的信号作为自适应抵消器的原始输入
信号p (n );
(3)因为QRS 波的能量主要集中在尺度25上,故利用尺度25上的小波系数进行单尺度重构,得到
该尺度上的高频细节信号,将它作为自适应抵消器的参考输入信号x (n );
(4)进行自适应滤波处理,得到自适应滤波器的输出信号y (n )及误差信号e(n ).其中,y (n )是对噪声干扰对应尺度上所包含的心电信号的逼近,e(n )为原始心电信号中的噪声干扰信号.
38安徽大学学报(自然科学版)第30卷
图5 用去噪声干扰细节分量的方法消噪后的ECG 图6 用本文中的滤波方法消噪后的ECG
2.3 实验结果和分析
对图3所示的心电信号分别按照 去除噪声干扰所对应尺度上细节分量 的小波变换滤波方法和上述基于小波变换的自适应滤波方法,进行消噪处理,可分别得到滤波后的心电信号f 1(n )和f 2(n),如图5、图6所示.噪声干扰对应的小波分解尺度上所包含的心电信息成分,即f 1(n)中损失的心电信息y (n)如图7所示
.
图7 f 1(n )中损失的心电信息
可见f 2(n)有效地抑制了心电信号中的噪声干扰,较好地保持了心电信号波形.另外,可以从信噪比的提高量来衡量算法的滤波效果.在这里,将ECG 信号看作准随机信号,设定其均值为零,则信噪比
定义为:SNR =10log E [y 2i ]E [(x i -y i )2]
,其中,x i 为含噪声干扰的ECG 信号;y i 为滤波后的ECG 信号.根据f 1(n )和f 2(n)分别计算以上两种滤波方法的信噪比,可得本文滤波方法比 去细节 的小波变换滤波方法的信噪比提高0.7561db ,从而说明f 2(n)比f 1(n )包含更多的心电信息,更好地保持了心电信号的波形特征.
为了测试本文滤波方法的性能效果,又利用20例含有噪声干扰的实际心电信号进行了仿真试验.结果显示各例原始心电信号中的噪声干扰都被有效地去除了,而心电信号的波形特征保持较好.计算它们的滤波信噪比,并与用去除噪声干扰细节分量的小波方法时的滤波信噪比相比较,得知SNR 平均提高0.7329db ,从而验证了基于小波变换的自适应滤波方法在心电信号消噪中的有效性.
3 结 语
通过上面的分析讨论和实验结果表明,在对心电信号进行小波变换的基础上,提取适当尺度上的信号分量进行自适应滤波处理,即进行基于小波变换的自适应滤波,可以在最大限度地滤除噪声干扰的同时,较好地保持心电信号波形,减少有用心电信息的损失.
参考文献:
[1] A gante P M.M arques de Sa J P.ECG no ise filter i ng using w avelets w ith soft –thresho l ding m ethods[J].Compu ter
i n Card i o logy ,1999,26(9):535-538.
[2] 王笑梅,王辉.基于小波的EC G 信号噪声消除[J].上海师范大学学报:自然科学版,2002,31(2):50-54.
[3] 杨丰,余英林.小波变换在心电信号滤波处理中的应用研究[J].生物医学工程学杂志,1997,14(4):317-
320.
[4] 彭玉华.小波变换与工程应用[M ].北京:科学出版社,1999:42-43,49-54.
[5] 吴兆熊,等.数字信号处理(下册)[M ].北京:国防工业出版社,1985:63-64.
39
第6期张艳丽,等:基于小波变换自适应滤波方法的ECG 信号消噪
40安徽大学学报(自然科学版)第30卷ECG signal deno isi ng based on w avelet transfor m and adaptive filter
Z HANG Y an-li1,YANG Ren-di2
(1.School o f In f o r m ati on&E lectronics Eng i neeri ng,Shandong Institute o f Busi ness and T echno logy,Y anta i 264005,Ch i na;
2.Schoo l of E lectromechan i ca l&A uto m ob ile Eng i nee ri ng,Y anta iU n i versity,Y anta i 264005,Ch i na)
Abst ract:For reduci n g the i n for m ation l o st of ECG si g na l i n t h e deno isi n g m ethod o fw avelet transfor m,a m odified m ethod based on w ave let transfor m ation and adapti v e filter w as designed.The ECG signal w as deco m posed into m u lti-sca le co m ponents by DWT.The deta il signal of the scale w ith the m ost QRS ener gy w as used as the reference si g na l o f the adaptive filter,and t h e reconstr ucted si g na l of no ises was used as the ori g ina l signa.l The experi m enta l results de m onstrated that the no ise o fECG signalw as successfu lly re moved, t h e usefu lECG i n for m ation w as perfectl y preserved,and the m od ifi e d deno isi n g m et h od w as efficient and had better capab ility o f filteri n g.
K ey w ords:ECG si g na;l w avelet transfor m;adapti v e filter;signal deno ising
责任编校:朱夜明
(上接第35页)
参考文献:
[1] 张建合,郭广平.国内外飞速发展的热像无损检测技术[J].无损探伤,2005,29(1):1-4.
[2] M aldague X,G a l m iche F,Z iad iA.A dvances i n pulsed phase v i deo ther m og raphy[J].In fra red Phy si cs&T echno l ogy,
2002,43:175-181.
[3] Z ong M i ng cheng,et a.l Pu lsed-hea ting Infrared T hermography N on-destructive T esti ng T echn i que[J].SP IE,
1996,2899:649-654.
[4] 刘莹,张记龙.材料的红外无损检测技术及其进展[J].华北工学院测试技术学报,2001,15(4):275-279.
[5] 薛书文,雷雨,陈习权,等.脉冲红外热成像无损检测的物理检测机理[J].电子科技大学学报,2005,34(3):
320-322.
[6] 梅林,张广明,王裕文.红外热成像无损检测技术及其应用现状[J].无损检测,1999,21(10):466-468.
[7] 梁昆淼.数学物理方法[M].北京:人民教育出版社,1998.
[8] 俞昌铭.热传导及数值分析[M].北京:清华大学出版社,2001.
The application of fi nite ele m ent nu m erical
si m ulation i n the quantitati ve study of i nfrared testi ng
HUANG H ong-m e,i WANG H ong-guang,W E I Zhen
(D epart ment o f Optical and E lectron ic Eng i neer i ng,T i anji n U n i v ers it y o f T echno logy,T i anji n 300191,China)
Abst ract:Based on the heat ex c hange t h eo r y,co m bined w ith the pr operties o f infrared testing the num er-i ca l ana l y sis o f i n frared testing are expatiated and num erical si m ulation pro ject are presented.The so ft w are o f fi n ite ele m ent m ethod-ANSYS has been applied i n the quantitati v e study of i n frared testing successfully. U si n g th is m ethod,t h e distance bet w een surface and defect can be ca lculated.The num erica l resu lts proved t h at t h e procedure is effective and versatile.
K ey w ords:i n frared testing;quantitati v e;finite e le m en;t num erica l si m ulati o n
责任编校:朱夜明
自适应均衡算法研究
自适应均衡算法LMS研究 一、自适应滤波原理与应用 所谓自适应滤波器,就是利用前一时刻已获得的滤波器参数等结果,自动地调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。根据环境的改变,使用自适应算法来改变滤波器的参数和结构。 1.1均衡器的发展及概况 均衡是减少码间串扰的有效措施。均衡器的发展有史已久,二十世纪60年代前,电话信道均衡器的出现克服了数据传输过程中的码间串扰带来的失真影响。但是均衡器要么是固定的,要么其参数的调整是手工进行。1965年,Lucky在均衡问题上提出了迫零准则,自动调整横向滤波器的权系数。1969年,Gerhso和Porkasi,Milier分别独立的提出采用均方误差准则(MSE)。1972年,ungeboekc将LMS算法应用于自适应均衡。1974年,Gedard 在kalmna滤波理论上推导出递推最小均方算法RLS(Recursive least-squares)。LMS类算法和RLS类算法是自适应滤波算法的两个大类。自适应滤波在信道均衡、回波抵消、谱线增强、噪声抑制、天线自适应旁瓣抑制、雷达杂波抵消、相参检测、谱估计、窄带干扰抑制、系统辨识、系统建模、语音信号处理、生物医学、电子学等方面获得广泛的应用。 1.2均衡器种类 均衡技术可分为两类:线性均衡和非线性均衡。这两类的差别主要在于自适应均衡器的输出被用于反馈控制的方法。如果判决输出没有被用于均衡器的反馈逻辑中,那么均衡器是线性的;如果判决输出被用于反馈逻辑中并帮助改变了均衡器的后续输出,那么均衡器是非线性的。
LMS RLS 快速RLS 平方根RLS 梯度RLS LMS RLS 快速RLS 平方根RLS 梯度RLS LMS RLS 快速RLS 平方根RLS 算法图1.1 均衡器的分类 1.3自适应算法LMS算法 LMS算法是由widrow和Hoff于1960年提出来的,是统计梯度算法类的很重 要的成员之一。它具有运算量小,简单,易于实现等优点。 LMS算法是建立在Wiener滤波的基础上发展而来的。Wiener解是在最小均方误差(MMSE)意义下使用均方误差作为代价函数而得到的在最小误差准则下的最优解。因其结构简单、稳定性好,一直是自适应滤波经典有效的算法之一,被广泛应用于雷达、通信、声纳、系统辨识及信号处理等领域。 1.3.1 MSE的含义 LMS 算法的推导以估计误差平方的集平均或时平均(即均方误差,MSE)为基础。下面先介绍MSE的概念。 设计一个均衡系统如下图所示:
数字信号处理-低通滤波器设计实验
实验报告 课程名称:数字信号处理 实验名称:低通滤波器设计实验 院(系): 专业班级: 姓名: 学号: 指导教师: 一、实验目的: 掌握IIR数字低通滤波器的设计方法。 二、实验原理: 2.1设计巴特沃斯IIR滤波器 在MATLAB下,设计巴特沃斯IIR滤波器可使用butter 函数。 Butter函数可设计低通、高通、带通和带阻的数字和模拟IIR滤波器,其特性为使通带内的幅度响应最大限度地平坦,但同时损失截止频率处的下降斜度。在期望通带平滑的情况下,可使用butter函数。butter函数的用法为:
[b,a]=butter(n,Wn)其中n代表滤波器阶数,W n代表滤波器的截止频率,这两个参数可使用buttord函数来确定。buttord函数可在给定滤波器性能的情况下,求出巴特沃斯滤波器的最小阶数n,同时给出对应的截止频率Wn。buttord函数的用法为:[n,Wn]= buttord(Wp,Ws,Rp,Rs)其中Wp和Ws分别是通带和阻带的拐角频率(截止频率),其取值范围为0至1之间。当其值为1时代表采样频率的一半。Rp和Rs分别是通带和阻带区的波纹系数。 2.2契比雪夫I型IIR滤波器。 在MATLAB下可使用cheby1函数设计出契比雪夫I 型IIR滤波器。 cheby1函数可设计低通、高通、带通和带阻契比雪夫I 型滤IIR波器,其通带内为等波纹,阻带内为单调。契比雪夫I型的下降斜度比II型大,但其代价是通带内波纹较大。cheby1函数的用法为:[b,a]=cheby1(n,Rp,Wn,/ftype/)在使用cheby1函数设计IIR滤波器之前,可使用cheblord 函数求出滤波器阶数n和截止频率Wn。cheblord函数可在给定滤波器性能的情况下,选择契比雪夫I型滤波器的最小阶和截止频率Wn。cheblord函数的用法为: [n,Wn]=cheblord(Wp,Ws,Rp,Rs)其中Wp和Ws分别是通带和阻带的拐角频率(截止频率),其取值范围为0至1之间。当其值为1时代表采样频率的一半。Rp和Rs分别是通带和阻带区的波纹系数。 三、实验要求: 利用Matlab设计一个数字低通滤波器,指标要求如下:
数字信号处理的应用和发展前景
数字信号处理的应用与发展趋势 作者:王欢 天津大学信息学院电信三班 摘要: 数字信号处理是应用于广泛领域的新兴学科,也是电子工业领域发展最为迅速的技术之一。本文就数字信号处理的方法、发展历史、优缺点、现代社会的应用领域以及发展前景五个方面进行了简明扼要的阐述。 关键词: 数字信号处理发展历史灵活稳定应用广泛发展前景 数字信号处理的简介 1.1、什么是数字信号处理 数字信号处理简称DSP,英文全名是Digital Signal Processing。 数字信号处理是利用计算机或专用处理设备以数字的形式对信号进行采集、变换、滤波、估值、增强、压缩、识别等处理,以得到符合人们需要的信号形式。 DSP系统的基本模型如下: 数字信号处理是一门涉及许多学科且广泛应用于许多领域的新兴学科。它以众多的学科为理论基础,所涉及范围及其广泛。例如,在数学领域、微积分、概率统计、随即过程、数值分析等都是数字信号处理的基本工具;同时与网络理论、信号与系统、控制论、通信理论、故障诊断等学科也密切相关。近年来的一些新兴学科,如人工智能、模式识别、神经网络等,都是与数字信号处理密不可分的。数字信号处理可以说许多经典的理论体系作为自己的理论基础,同时又使自己成为一门新兴学科的理论基础。 1.2、数字信号系统的发展过程 数字信号处理技术的发展经历了三个阶段。 70 年代DSP 是基于数字滤波和快速傅里叶变换的经典数字信号处理, 其系统由分立的小规模集成电路组成, 或在通用计算机上编程来实现DSP 处理功能, 当时受到计算机速度和存储量的限制,一般只能脱机处理, 主要在医疗电子、生物电子、应用地球物理等低频信号处理方面获得应用。 80 年代DSP 有了快速发展, 理论和技术进入到以快速傅里叶变换(FFT) 为主体的现代信号处理阶段, 出现了有可编程能力的通用数字信号处理芯片, 例如美国德州仪器公司(TI公司) 的TMS32010 芯片, 在全世界推广应用, 在雷达、语音通信、地震等领域获得应用, 但芯片价格较贵, 还不能进 入消费领域应用。 90 年代DSP 技术的飞速发展十分惊人, 理论和技术发展到以非线性谱估计为代表的更先进的信号处理阶段, 能够用高速的DSP 处理技术提取更深层的信息, 硬件采用更高速的DSP 芯片, 能实时地完成巨大的计算量, 以TI 公司推出的TMS320C6X 芯片为例, 片内有两个高速乘法器、6 个加法器, 能以200MHZ 频率完成8 段32 位指令操作, 每秒可以完成16 亿次操作, 并且利用成熟的微电子工艺批量生产,使单个芯片成本得以降低。并推出了C2X 、C3X 、C5X 、C6X不同应用范围的系列, 新一代的DSP 芯片在移动通信、数字电视和消费电子领域得到广泛应用, 数字化的产品性能价 格比得到很大提高, 占有巨大的市场。 1.3、数字信号处理的特点
自适应滤波LMS算法及RLS算法及其仿真.
自适应滤波 第1章绪论 (1) 1.1自适应滤波理论发展过程 (1) 1.2自适应滤波发展前景 (2) 1.2.1小波变换与自适应滤波 (2) 1.2.2模糊神经网络与自适应滤波 (3) 第2章线性自适应滤波理论 (4) 2.1最小均方自适应滤波器 (4) 2.1.1最速下降算法 (4) 2.1.2最小均方算法 (6) 2.2递归最小二乘自适应滤波器 (7) 第3章仿真 (12) 3.1基于LMS算法的MATLAB仿真 (12) 3.2基于RLS算法的MATLAB仿真 (15) 组别:第二小组 组员:黄亚明李存龙杨振
第1章绪论 从连续的(或离散的)输入数据中滤除噪声和干扰以提取有用信息的过 程称为滤波。相应的装置称为滤波器。实际上,一个滤波器可以看成是 一个系统,这个系统的目的是为了从含有噪声的数据中提取人们感兴趣的、 或者希望得到的有用信号,即期望信号。滤波器可分为线性滤波器和非 线性滤波器两种。当滤波器的输出为输入的线性函数时,该滤波器称为线 性滤波器,当滤波器的输出为输入的非线性函数时,该滤波器就称为非线 性滤波器。 自适应滤波器是在不知道输入过程的统计特性时,或是输入过程的统计特性发生变化时,能够自动调整自己的参数,以满足某种最佳准则要求的滤波器。 1.1自适应滤波理论发展过程 自适应技术与最优化理论有着密切的系。自适应算法中的最速下降算法以及最小二乘算法最初都是用来解决有/无约束条件的极值优化问题的。 1942年维纳(Wiener)研究了基于最小均方误差(MMSE)准则的在可加性噪声中信号的最佳滤波问题。并利用Wiener.Hopf方程给出了对连续信号情况的最佳解。基于这~准则的最佳滤波器称为维纳滤波器。20世纪60年代初,卡尔曼(Kalman)突破和发展了经典滤波理论,在时间域上提出 了状态空间方法,提出了一套便于在计算机上实现的递推滤波算法,并且适用于非平稳过程的滤波和多变量系统的滤波,克服了维纳(Wiener)滤波理论的局限性,并获得了广泛的应用。这种基于MMSE准则的对于动态系统的离散形式递推算法即卡尔曼滤波算法。这两种算法都为自适应算法奠定了基础。 从频域上的谱分析方法到时域上的状态空间分析方法的变革,也标志 着现代控制理论的诞生。最优滤波理论是现代控制论的重要组成部分。在控制论的文献中,最优滤波理论也叫做Kalman滤波理论或者状态估计理论。 从应用观点来看,Kalman滤波的缺点和局限性是应用Kalman滤波时要求知道系统的数学模型和噪声统计这两种先验知识。然而在绝大多数实际应用问题中,它们是不知道的,或者是近似知道的,也或者是部分知道的。应用不精确或者错误的模型和噪声统计设计Kalman滤波器将使滤波器性能变坏,导致大的状态估计误差,甚至使滤波发散。为了解决这个矛盾,产生了自适应滤波。 最早的自适应滤波算法是最小JY(LMS)算法。它成为横向滤波器的一种简单而有效的算法。实际上,LMS算法是一种随机梯度算法,它在相对于抽头权值的误差信号平方幅度的梯度方向上迭代调整每个抽头权 值。1996年Hassibi等人证明了LMS算法在H。准则下为最佳,从而在理论上证明了LMS算法具有孥实性。自Widrow等人1976年提出LMs自适应滤波算法以来,经过30多年的迅速发展,已经使这一理论成果成功的应用到通信、系统辨识、信号处理和自适应控制等领域,为自适应滤波开辟了新的发展方向。在各种自适应滤波算法中,LMS算法因为其简单、计算量小、稳定性好和易于实现而得到了广泛应用。这种算法中,固定步长因子μ对算法的性能有决定性的影响。若μ较小时,算法收敛速度慢,并且为得到满意的结果需要很多的采样数据,但稳态失调误差
自适应信号处理论文程序原版
利用LMS 算法的自适应系统仿真 摘 要: 一待辩识的IIR 系统,用一有限长度的FIR 滤波器来近似辩识系统,介绍了基于最小均方算法(LMS 算法)的自适应均衡器的原理和结构,采用LMS 算法得到N 阶FIR 滤波器来逼近原IIR 滤波器,并且分析了步长,滤波器系数,初始权值以及自适应过程中的噪声对系统辩识性能的影响。针对用硬件实现LMS 算法的自适应均衡器存在的诸多缺点,利用MATLAB 工具对各种结构形式的自适应均衡器在不同信道模型下的收敛速度和精度进行仿真,描述了用仿真试验得出LMS 自适应均衡滤波器的收敛性和跟踪性能与滤波器长度和选代算法跳步两个重要的参数之间的定量关系,为此构建了有实用价值的系列时延扩展的传输环境和可变多径传输信道,建立了系统仿真模型,做出了仿真试验结果并分析了仿真试验结果的意义。 关 键 词 LMS 算法; FIR 滤波器; 自适应滤波;IIR; MATLAB 仿真 关 键 词: LMS 算法 自适应均衡系统 仿真 移动通信 无线数据通信 0、 引言 待辨识系统是极点-零点(IIR )系统,要用一个有限长度的FIR 滤波器来近似辨识该系统如图1所示。已知待辨识系统的传输函数为: 23.01.111)(-+-=z z z H d (IIR ),求FIR 滤波器的系数。 图1 自适应系统辨识的原理图 1、系统设计要求 1)、待辨识系统为IIR 滤波器,利用自适应滤波的方法,采用LMS 算法得到N 阶FIR 滤波器来逼近原IIR 滤波器; 2)、输入信号)(n x 为高斯白噪声;
3)、考察步长delta 、阶数N 对自适应滤波器性能的影响。 2、系统设计原理 由于LMS 算法不需要离线方式的梯度估值或重复使用数据以及它的简单易行性而被广泛采用。只要自适应系统是线性组合器,且有输入数据向量)(n x 和期待响应)(n d 在每次迭代时可利用,对许多自适应处理的应用来说,LMS 算法是最好的选择。 我们采用LMS 算法自适应调整FIR 滤波器的系数,自适应滤波器的结构是具有可调系数)1(,),1(),0(-N h h h 的直接型FIR 滤波器。 输入信号)(n x 为功率为1,长度为1000点的高斯白噪声。)(n d 为期望响应,)(n y 为自适应FIR 滤波器的输出,误差信号)()()(n y n d n e -=。 对一个FIR 滤波器,其可调系数为10),(-≤≤N k k h ,N 为滤波器的阶数。则输出 M n k n x k h n y N k ,,0), ()()(10 =∑-=-= LMS 算法是由最速下降法导出的,求出使均方误差∑==M n n e 0 2)(ε达到最小值时相应的最佳滤 波器系数组。 从任意选择的一组)(k h 初始值开始,接着在每个新的输入采样值)(n x 进入自适应滤波器后,计算相应的输出)(n y ,再形成误差信号)()()(n y n d n e -=,并根据如下方程不断修正滤波器系数: ,1,0,10),()()()(1=-≤≤-???+=-n N k k n x n e k h k h n n 其中?为步长参数,)(k n x -为n 时刻输入信号在滤波器的第k 个抽头处的采样值,)()(k n x n e -?是滤波器第k 个系数的负梯度的近似值。这就是自适应地调整滤波器系数以便使平方误差ε最小化的LMS 算法。 3、系统仿真和结果分析 1)、仿真环境和各参量设置 在MATLAB7 上用软件仿真,仿真条件: (1) 高斯白噪声的产生 利用MATLAB 的库函数randn 产生均值为零,方差为1的高斯白噪声。为了观察不同的步长和阶数对系统性能的影响,必要时可以设定“种子值”产生相同的输入序列。 (2) 待辨识系统对输入的期待响应 由待辨识系统的传递函数可以写出它的差分方程形式为
数字信号处理滤波器
1.设计物理可实现的低通滤波器 设计思路:因为要设计FIR有限脉冲响应滤波器,通常的理想滤波器的单位脉冲响应h是无限长的,所以需要通过窗来截断它,从而变成可实现的低通滤波器。程序如下: clc;clear all; omga_d=pi/5; omga=0:pi/30:pi; for N=3:4:51; w1= window(@blackman,N); w2 = window(@hamming,N); w3= window(@kaiser,N,2.5); w4= window(@hann,N); w5 = window(@rectwin,N); M=floor(N/2); subplot(311);plot(-M:M,[w1,w2,w3,w4,w5]); axis([-M M 0 1]); legend('Blackman','Hamming','kaiser','hann','rectwin'); n=1:M; hd=sin(n*omga_d)./(n*omga_d)*omga_d/pi; hd=[fliplr(hd),1/omga_d,hd]; h_d1=hd.*w1';h_d2=hd.*w2';h_d3=hd.*w3';h_d4=hd.*w4';h_d5=hd.*w5'; m=1:M; H_d1=2*cos(omga'*m)*h_d1(M+2:N)'+h_d1(M+1); H_d2=2*cos(omga'*m)*h_d2(M+2:N)'+h_d2(M+1); H_d3=2*cos(omga'*m)*h_d3(M+2:N)'+h_d3(M+1); H_d4=2*cos(omga'*m)*h_d4(M+2:N)'+h_d4(M+1); H_d5=2*cos(omga'*m)*h_d5(M+2:N)'+h_d5(M+1); subplot(312);plot(omga,[H_d1,H_d2,H_d3,H_d4,H_d5]); legend('Blackman','Hamming','kaiser','hann','rectwin'); subplot(313);plot(abs([fft(h_d1);fft(h_d2);fft(h_d3);fft(h_d4);fft(h_ d5)])'); pause(); end 程序分析: 整个对称窗的长度为N,然而为了在MATLAB中看到窗函数在负值时的形状需将N变为它的一半,即为2M+1个长度。窗长设置为从3开始以4为间隔一直跳动51。则长度相同的不同窗函数在时域[-M,M]的形状如第一个图所示。 对窗函数进行傅里叶变换时,将零点跳过去先构造一个一半的理想滤波器的脉冲响应hd,再将零点位置求导得出的数赋值进去。将生成的hd左右颠倒形成了一个理想的滤波器的脉冲响应。将构造的理想滤波器的脉冲响应依次与之前定义的窗函数相乘,相乘出来的为列向量,用转置将其变成行向量,形成的h_d就是非理想的低通滤波器的脉冲响应序列。因为h_d为对称奇数长度序列,它的DTFT 可以是二倍的离散余弦变化,而零点的位置则直接带入求出,两者相加则是H_d。则第二个图表示的是五个矩阵向量在频域的变化,而第三个图表示的是五个非理想低通滤波器的傅里叶变换,图三FFT给出的结果永远是对称的,因为它显示
介绍了噪声抵消的原理和从强噪声背景中自适应滤波提取有用信号的
LMS与RLS自适应滤波算法性能比较 马文民 【摘要】:介绍了自适应滤波器去除噪声的原理和从强噪声背景中采用自适应滤波提取有用信号的方法,并对最小均方(LMS, Least Mean Squares)和递推最小二乘(RLS, Recursive Least Squares)两种基本自适应算法进行了算法原理、算法性能分析。计算机模拟仿真结果表明,这两种算法都能通过有效抑制各种干扰来提高强噪声背景中的信号。检测特性相比之下,RLS 算法具有良好的收敛性能,除收敛速度快于LMS算法和NLMS算法以及稳定性强外,而且具有更高的起始收敛速率、更小的权噪声和更大的抑噪能力。 【关键词】:自适应滤波;原理;算法;仿真 引言: 自适应滤波是近30年以来发展起来的一种最佳滤波方法。它是在维纳滤波,kalman滤波等线性滤波基础上发展起来的一种最佳滤波方法。由于它具有更强的适应性和更优的滤波性能。从而在工程实际中,尤其在信息处理技术中得到广泛的应用。自适应滤波的研究对象是具有不确定的系统或信息过程。"不确定"是指所研究的处理信息过程及其环境的数学模型不是完全确定的。其中包含一些未知因数和随机因数。任何一个实际的信息过程都具有不同程度的不确定性,这些不确定性有时表现在过程内部,有时表现在过程外部。从过程内部来讲,描述研究对象即信息动态过程的数学模型的结构和参数是我们事先不知道的。作为外部环境对信息过程的影响,可以等效地用扰动来表示,这些扰动通常是不可测的,它们可能是确定的,也可能是随机的。此外一些测量噪音也是以不同的途径影响信息过程。这些扰动和噪声的统计特性常常是未知的。面对这些客观存在的各种不确定性,如何综合处理信息过程,并使某一些指定的性能指标达到最优或近似最优,这就是自适应滤波所要解决的问题。 在这几十年里,数字信号处理技术取得了飞速发展,特别是自适应信号处理技术以其计算简单、收敛速度快等许多优点而广泛被使用。它通过使内部参数的最优化来自动改变其特性。自适应滤波算法在统计信号处理的许多应用中都是非常重要的。 在工程实际中,经常会遇到强噪声背景中的微弱信号检测问题。例如在超声波无损检测领域,因传输介质的不均匀等因素导致有用信号与高噪声信号迭加在一起。被埋藏在强背景噪声中的有用信号通常微弱而不稳定,而背景噪声往往又是非平稳的和随时间变化的,此时很难用传统方法来解决噪声背景中的信号提取问题。自适应噪声抵消技术是一种有效降噪的方法,当系统能提供良好的参考信号时,可获得很好的提取效果。与传统的平均迭加方法相比采用自适应平均处理方法还能降低样本数量。 1自适应滤波器的基本原理 所谓的自适应滤波,就是利用前一时刻以获得的滤波器参数的结果,自动的调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。自适应滤波器实质上就是一种能调节其自身传输特性以达到最优的维纳滤波器。自适应滤波器不需要关于输入信号的先验知识,计算量小,特别适用于实时处理。 由于无法预先知道信号和噪声的特性或者它们是随时间变化的,仅仅用FIR和IIR两种具有固定滤波系数的滤波器无法实现最优滤波。在这种情况下,必须设计自适应滤波器,以跟踪信号和噪声的变化。 自适应滤波器的特性变化是由自适应算法通过调整滤波器系数来实现的。一般而言,自适应滤波器由两部分组成,一是滤波器结构,二是调整滤波器系数的自适应算法。 自适应噪声抵消系统的核心是自适应滤波器,自适应算法对其参数进行控制,以实现最佳滤波。不同的自适应滤波器算法,具有不同的收敛速度、稳态失调和算法复杂度。根据自
自适应信号处理最速下降法实验
自适应信号处理最速下降法实验 一 实验目的 考察最速下降法应用于预测器的瞬态特性。通过保持特征值扩散度不变,而改变步长参数,观察过阻尼和欠阻尼两种情况下()1v n 和()2v n 以及)(1n ω和 )(2n ω随n 改变而改变的过程。 二 实验要求 固定特征值扩散度()10R χ=,令步长参数μ分别为0.3和1.0,1 1.1955a =-, 20.95a =,1 1.818λ=,20.182 λ=,2m in 0.0322J σ==,观察()1v n 和()2v n 以及 ()1n ω和()2n ω随n 改变而变化的情况。 三 实验过程 首先让步长参数为0.3,得到过阻尼情况下()1v n 和()2v n 以及()1n ω和()2n ω随n 改变而变化的曲线。如下图所示: 图 1:步长参数0.3μ=过阻尼情况 图中曲线中的同心椭圆从内到外依次对应n=0,1,2,3……的情况,下同。
图 2:步长参数0.3μ=过阻尼情况 再让步长参数为1.0,得到欠阻尼情况下()1v n 和()2v n 以及()1n ω和()2n ω随n 改变而变化的曲线。如下图所示: 图 3:步长参数 1.0μ=欠阻尼情况
图 4:步长参数 1.0μ=欠阻尼情况 四 实验结果和分析 通过观察上述曲线,可得到如下结论: 1 最速下降法的瞬态特性对步长参数的变化是高度敏感的。而且当步长μ较小时,最速下降法的瞬态特性是过阻尼的,即连接点V (0),V (1),V (2)…所组成的轨迹沿着一条连续的路径;当步长μ达到或接近最大值max 2max λμ=时,最 速下降法的瞬态特性是欠阻尼的,即轨迹显现振荡现象。 2上面的实验验证了当max 2 0λμ< <时,根据式k mse k μλτ21,≈ 可得步长参 数μ越小,最速下降法中每一个自然模式的衰减速率越慢。且当max 2max λμ=时,出现欠阻尼现象,如果μ再大,则算法发散。 3 对于固定的()J n ,()()12,v n v n ????随n 变动的轨迹正交于()J n 固定时 ()()12,v n v n ????的轨迹,这也适用于()J n 固定时()()12,n n ωω????的轨迹。
常见的信号处理滤波方法
低通滤波:又叫一阶惯性滤波,或一阶低通滤波。是使用软件编程实现普通硬件RC 低通滤波器的功能。 适用范围:单个信号,有高频干扰信号。 一阶低通滤波的算法公式为: Y(n)X(n)(1)Y(n 1)αα=+-- 式中: α是滤波系数;X(n)是本次采样值;Y(n 1)-是上次滤波输出值;Y(n)是本次滤波输出值。 滤波效果1: 红色线是滤波前数据(matlab 中生成的正弦波加高斯白噪声信号) 黄色线是滤波后结果。 滤波效果2:
matlab中函数,相当于一阶滤波,蓝色是原始数据(GPS采集到的x(北)方向数据,单位m),红色是滤波结果。 一阶滤波算法的不足: 一阶滤波无法完美地兼顾灵敏度和平稳度。有时,我们只能寻找一个平衡,在可接受的灵敏度范围内取得尽可能好的平稳度。
互补滤波:适用于两种传感器进行融合的场合。必须是一种传感器高频特性好(动态响应好但有累积误差,比如陀螺仪。),另一传感器低频特性好(动态响应差但是没有累积误差,比如加速度计)。他们在频域上互补,所以进行互补滤波融合可以提高测量精度和系统动态性能。 应用:陀螺仪数据和加速度计数据的融合。 互补滤波的算法公式为: 1122Y(n)X (n)(X (n)Y(n 1))αα+=+-- 式中:1α和2α是滤波系数;1X (n)和2X (n)是本次采样值;Y(n 1)-是上次滤 波输出值;Y(n)是本次滤波输出值。 滤波效果 (测试数据): 蓝色是陀螺仪 信号,红色是加 速度计信号,黄 色是滤波后的 角度。
. 互补滤波实际效果: .
卡尔曼滤波:卡尔曼滤波器是一个“optimal recursive data processing algorithm (最优化自回归数据处理算法)”。对于解决很大部分的问题,它是最优,效率最高甚至是最有用的。他的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测。 首先,用于测量的系统必须是线性的。 (k)(k 1)(k)(k)X AX BU w =-++ (k)(k)(k)Z HX v =+ (k)X 是系统k 时刻的状态,(k)U 是系统k 时刻的控制量。(k)Z 是系统k 时 刻的测量值。A 和B 为系统参数,(k)w 和(k)v 分别表示过程和测量的噪声,H 是测量系统参数。 在进行卡尔曼滤波时: 首先进行先验预测: (k 1|k)(k |k)(k)(k)X AX BU w +=++ 计算先验预测方差: '(k 1|k)(k |k)(k)P AP A Q +=+ 计算增益矩阵: (k 1)(k 1|k)'/((k 1|k)'(k 1))Kg P H HP H R +=++++ 后验估计值: (k 1|k 1)(k 1|k)(k 1)(Z(k 1)(k 1|k))X X Kg HX ++=++++-+ 后验预测方差: (k 1|k 1)(1(k 1))(k 1|k)P Kg H P ++=-++ 其中,(k)Q 是系统过程激励噪声协方差,(k)R 是测量噪声协方差。 举例说明: (下文中加粗的是专有名词,需要理解) 预测小车的位置和速度的例子(博客+自己理解):
matlab在自适应信号处理方面的应用 - 副本
1波束宽度与波达方向及阵元数的关系 clc clear all close all ima=sqrt(-1); element_num1=16; %阵元数 element_num2=128; element_num3=1024; lamda=0.03; %波长为0.03米 d=1/2*lamda; %阵元间距与波长的关系 theta=0:0.5:90; for j=1:length(theta); fai(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num1*d)); psi(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num2*d)); beta(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num3*d)); end figure; plot(theta,fai,'r',theta,psi,'b',theta,beta,'g'),grid on xlabel('theta'); ylabel('Width in radians') title('波束宽度与波达方向及阵元数的关系') 仿真图如下:
3. 当阵元间距 时,会出现栅瓣,导致空间模糊。仿真图如下: 4. 类似于时域滤波,天线方向图是最优权的傅立叶变换 仿真程序和仿真图如下: clc clear all close all ima=sqrt(-1); element_num=32; %阵元数 source_num=1; %信源数 d_lamda=1/2; %阵元间距与波长的关系 theta=linspace(-pi/2,pi/2,200); theta0=0; %来波方向 w=exp(ima*2*pi*d_lamda*sin(theta0)*[0:element_num-1]'); for j=1:length(theta); a=exp(ima*2*pi*d_lamda*sin(theta(j))*[0:element_num-1]'); p(j)=w'*a; end figure; subplot(1,2,1) plot(theta,abs(p)),grid on xlabel('theta/radian') ylabel('amplitude') /2d λ >
自适应滤波实验报告
LMS 自适应滤波实验报告 : 学号: 日期:2015.12.2 实验容: 利用自适应滤波法研究从宽带信号中提取单频信号的方法。 设()()()()t f B t f A t s t x 212cos 2cos π?π+++=,()t s 是宽带信号,A ,B ,1f ,2f , ?任选 (1)要求提取两个单频信号; (2)设f f f ?+=12,要求提取单频信号()t f 22cos π,研究f ?的大小对提取单频信号的影响。 1. 自适应滤波器原理 自适应滤波器理论是现代信号处理技术的重要组成部分,它对复杂信号的处理具有独特的功能。自适应滤波器在信号处理中属于随机信号处理的畴。在一些信号和噪声特性无法预知或他们是随时间变化的情况下,自适应滤波器通过自适应滤波算法调整滤波器系数,使得滤波器的特性随信号和噪声的变化,以达到最优滤波的效果,解决了固定全系数的维纳滤器和卡尔曼滤波器的不足。 (1) 自适应横向滤波器 所谓自适应滤波,就是利用前一时刻已获得的滤波器参数等结果,自动调节现时刻的滤波器参数,以适应信号和噪声未知或随时间变化的统计特性,从而实现最优滤波。自适应滤波器由两个部分组成:滤波器结构和调节滤波器系数的自适应算法。自适应滤波器的特点是自动调节自身的冲激响应,达到最优滤波,此算法适用于平稳和非平稳随机信号,并且不要求知道信号和噪声的统计特性。
一个单输入的横向自适应滤波器的原理框图如图所示: 实际上这种单输入系统就是一个FIR 网络结构,其输出()n y 用滤波器单位脉冲响应表示成下式: ()()()∑-=-=1 N m m n x m w n y 这里()n w 称为滤波器单位脉冲响应,令: ()()n i n x x i w w m i i i ,1,1,1+-=-=+=用j 表示,上式可以写成 ∑==N i ij i j x w y 1 这里i w 也称为滤波器加权系数。用上面公式表示其输出,适用于自适应线性组合器,也适用于FIR 滤波器。将上式表示成矩阵形式: X W W X j T T j j y == 式中 [][ ] T Nj j j j T N x x x w w w X W ,...,,, ,...,,2121== 误差信号表示为 X W j T j j j j d y d e -=-= (2) 最小均方(LMS )算法 Widrow 等人提出的最小均方算法,是用梯度的估计值代替梯度的精确值,这种算法简单易行,因此获得了广泛的应用。
自适应信号处理
自适应信号处理-唐正必马长芳科学出版社 赵春晖哈尔滨工程大学出版社 本书全面系统地阐述了自适应信号处理的理论及其应用,包括确定性信号与随机过程(平稳与非平稳信号)滤波检测理论,不用训练序列的本身自适应的盲信号处理理论,从一维到多维、线性到非线性、经典自适应到神经智能自适应等近代信号处理。它将信息论、时间序列分析、系统辨识、谱 估计理论、高阶谱理论、优化理论、进化计算,以及神经网络理论等学科知识综合而成一体。 本书共十章,内容有自适应滤波基本原理、自适应LMS滤波器、自适应RLS滤波器、自适应格型滤波器、自适应递归滤波器、自适应谱线增强与谱估计、自适应噪声干扰抵消器、自适应均衡器、自适应阵列处理与波束形成,以及自适应神经信息处理。对于盲信号处理的理论与方法,将分散在最后三章中论述。 本书取材新颖,内容丰富;叙述深入浅出,系统性强,概念清楚。它总结了自适应信号处理的最新成果,其中包括作者在该领域内所取得的科研成果,是一部理论联系实际的专业理论专著。可作为信息与通信、雷达、声纳、自动控制、生物医学工程等专业的研究生的教材或主要参考书,也可供广大科研人员阅读。 第1章绪论 1.1 自适应滤波的基本概念 1.2 自适应信号处理的发展过程 1.3 自适应信号处理的应用 第2章维纳滤波 2.1 问题的提出 2.2 离散形式维纳滤波器的解 2.3 离散形式维纳滤波器的性质 2.4 横向滤波器的维纳解 第3章最小均方自适应算法 3.1 最陡下降法 3.2 牛顿法 3.3 LMS算法 3.4 LMS牛顿算法 第4章改进型最小均方自适应算法 4.1 归一化LMS算法 4.2 块LMS算法 4.3 快速块LMS算法 第5章最小均方误差线性预测及自适应格型算法 5.1 最小均方误差线性预测 5.2 Lev ins on-Durbi n算法 5.3 格型滤波器 5.4 最小均方误差自适应格型算法 第6章线性最小二乘滤波 6.1 问题的提出 6.2 线性最小二乘滤波的正则方程 6.3 线性最小二乘滤波的性能 6.4 线性最小二乘滤波的向量空间法分析 第7章最小二乘横向滤波自适应算法 7.1 递归最小二乘算法 7.2 R LS算法的收敛性 7.3 R LS算法与LMS算法的比较
基于RLS算法自适应滤波器要点
基于RLS算法自适应滤波器的设计 摘要 自适应滤波器是统计信号处理的一个重要组成部分。在实际应用中,由于没有充足的信息来设计固定系数的数字滤波器,或者设计规则会在滤波器正常运行时改变,因此需要研究自适应滤波器。凡是需要处理未知统计环境下运算结果所产生的信号或需要处理非平稳信号时,自适应滤波器可以提供非自适应方法所不可能提供的新的信号处理能力。而且其性能通常远优于用常方法设计的固定滤波器。 本文从自适应滤波器研究的意义入手,介绍了自适应滤波器的基本理论思想,具体阐述了自适应滤波器的基本原理、算法及设计方法。自适应滤波器的算法是整个系统的核心。对 RLS算法自适应滤波器做了详细的介绍,采用改进的RLS算法设计自适应滤波器,并采用MATLAB进行仿真,通过实验结果来体现该滤波器可以根据信号随时修改滤波参数,达到动态跟踪的效果,使滤波信号更接近于原始信号。 关键词:自适应滤波器,RLS算法,噪声消除,FIR
第1章绪论 1.1 课题研究意义和目的 滤波技术是信号处理中的一种基本方法和技术,尤其数字滤波技术使用广泛,数字滤波理论的研究及其产品的开发一直受到很多国家的重视。 对自适应滤波算法的研究是当今自适应信号处理中最为活跃的研究课题之一。Windrow等于1967年提出的自适应滤波系统的参数能自动的调整而达到最优状况,而且在设计时,只需要很少的或根本不需要任何关于信号与噪声的先验统计知识。这种滤波器的实现差不多像维纳滤波器那样简单,而滤波器性能几乎如卡尔曼滤波器一样好。自适应滤波器与普通滤波器不同,它的冲激响应或滤波参数是随外部环境的变化而变化的,经过一段自动调节的收敛时间达到最佳滤波的要求。自适应滤波器本身有一个重要的自适应算法,这个算法可以根据输入、输出及原参量信号按照一定准则修改滤波参量,以使它本身能有效的跟踪外部环境的变化。因此,自适应数字系统具有很强的自学习、自跟踪能力和算法的简单易实现性。 自适应滤波技术的核心问题是自适应算法的性能问题,提出的自适应算法主要有最小均方(LMS)算法、递归最小二乘(RLS)算法及相应的改进算法如:归一化(NLMS)算法、变步长(SVSLMS)算法、递归最小二乘方格形(RLSL)算法等。这些算法各有特点,适用于不同的场合。研究自适应算法是自适应滤波器的一个关键内容。递归最小二乘(RLS)算法是线性自适应滤波算法中最基本的两类算法之一,由于基于LMS准则的自适应滤波算法的收敛速度通常较慢,有些在调整过程种的延时也较大。为了克服LMS的算法,我们采用在每个时刻对所有已输入信号重估的平方误差之和最小这样的准则,即RLS算法。RLS算法复数乘法正比于2k,使其自适应速度更快。目前应用最多的是系统辨识、回波消除、自适应谱线增强、自适应信道均衡、语音线性预测、自适应天线阵等诸多领域。 1.2 国内外研究发展状况 自适应滤波的基本理论通过几十年的发展已日趋成熟,近十几年来自适应滤波器的研究主要针对算法与硬件实现。算法研究主要是对算法速度和精度的改
自适应信号处理课后题答案
自适应信号处理课后题答案 1.求下列R 的特征值设 (1)?? ?? ? ?????=4202630341R (2)?? ? ???-=2)3/exp(6)3/exp(632ππj j R 解:(1)令λ为R 的特征值,则 (2)令λ为R 的特征值: 0)d e t (=-I R λ 0)d e t (=-I R λ 即: 042 2630 34=---λ λ λ 即: 02) 3/exp(6)3/exp(63=---λ ππλ j j 于是R 1的三个特征值分别为: 于是R 2 的两个特征值为: 1451454321-=,+=,λλλ= 5,021==λλ 2.证明任何两个实数的单输入自适应线性组合器的特征向量矩阵均为: ?? ????-= 111121Q 证明:由已知条件知相关矩阵为R : ? ? ? ???=a b b a R 则R 的特征值为:b a b a -=+=21,λλ 当b a +=1λ时,??? ???--=-b b b b I R λ,则特征向量为:]1,1[11q x = 当b a -=2λ时,? ? ? ???=-b b b b I R λ,则特征向量为:]1,1[22-=q x 则特征向量为: ?? ? ???-=111121Q 3.如图3.1所示,若自适应系统的输入和期待响应分别为:
(1))6/2cos(],6/)1(2sin[),6/2sin(10k d k x k x k k k πππ=-== (2)6/)]5.1(2[]6/)2(2[]6)1(2[1)6/2(04,,2--+-=+==k j k k j k j k k j k e d e e x e x ππππ 试计算最佳权向量和最小均方误差输出,并说明在两种情况下的自适应系统有什么不同? 解:(1)由题中条件知: 5.0][2 0=k x E 5.0][2 1=k x E [] 25.010=* k k x x E []00=k k x d E 4/3][1-=k k x d E 于是输入相关矩阵为: ??????=5.025.025.05.0R ? ?????-=4/30P 则最优权为:?? ? ???-==* -1547.15774.01 P R W opt 最小均方误差为:3889.0][2 min -=-=opt T k W P d E ζ (2)由题中已知条件知: 4][2 0=k x E 6/26/22 12][ππj j k e e x E -++= 6/308][πj k k e x d E =* 6/6/144][ππj j k k e e x d E -*+= 6/46/21022][ππj j k k e e x x E --*+= 6/46 /21122][ππj j k k e e x x E +=* 于是输入相关矩阵为: ??????++++=---6/26/26/46 /26/46/2222224ππππππj j j j j j e e e e e e R ?? ????+=-6/6 /6 /3448πππj j j e e e P R 的逆不存在, 则最优权为: ??? ? ????-=j c c W o p t 3234 最小均方误差为:0][2 min =-=opt T k W P d E ζ
数字信号处理和滤波器设计
计算机仿真技术实验指导书
河南科技大学电子信息工程学院 二〇〇八年二月
计算机仿真技术实验指导书 MATLAB是一种交互式的以矩阵为基本数据结构的系统。在生成矩阵对象时,不要求明确的维数说明。所谓交互式,是指MATLAB的草稿纸编程环境。 与C语言或FORTRON语言作科学数值计算的程序设计相比较,利用MATLAB可节省大量的编程时间。 本实验指导书主要讨论四个实验。 实验一信号与系统的时域分析以及信号合成与分解 1. 实验目的 (1) 连续时间信号的向量表示法和符号运算表示法,典型离散信号表示; (2) 连续信号和离散信号的时域运算与时域变换; (3) 连续系统和离散系统的卷积,以及冲激响应、阶跃响应、单位响应、零状态响应; (4) 周期信号的傅立叶级数分解与综合(以周期方波为例); 2. 实验原理与方法 (1) 信号在MATLAB中的表示方法 MATLAB用两种方法来表示连续信号,一种是用向量的方法来表示信号,另一种则是符号运算的方法来表示信号。用适当的MATLAB语句表示出信号后,就可以利用MATLAB的绘图命令绘制出直观的信号时域波形。 向量表示法表示信号的方法是:MATLAB用一个向量表示连续信号的时间范围,另一个向量表示连续信号在该时间范围内的对应样值。如下列代码p=0.001; t=-pi:p:pi; f=1+cos(t); plot(t,f) title('f(t)=1+cos(t)') xlabel('t') axis([-pi,pi,-0.2,2.4])
执行后即可绘制连续信号1+cos(t)的时域波形。 借助于符号运算以及符号绘图函数ezplot,也可以绘制连续信号时域波形。如下列代码 syms t f=sym('1+cos(t)') %定义符号表达式 ezplot(f,[-pi,pi]) %绘制符号表达式波形 set(gcf,'color','w') %设置当前图形背景颜色为白色 执行后即可绘制连续信号1+cos(t)的时域波形。 与连续信号的表示相似,在MATLAB中,离散信号也需要用两个向量来表示,其中一个向量表示离散信号的时间范围,另一个向量表示该离散信号在该时间范围内的对应样值。但与连续信号表示有所不同的是,表示离散信号时间范围向量的元素必须为整数。如下列代码 n=[-3,-2,-1,0,1,2,3]; x=[-3,2,-1,3,1,-2,1]; stem(n,x,'filled') set(gcf,'color','w') title('x(n)') xlabel('n') 执行后即可绘制离散信号x(n)={ -3,2,-1,3,1,-2,1}的时域波形。 ↑ n=0 (2) 连续信号和离散信号的时域运算与时域变换 对连续信号而言,其基本时域变换有反褶、平移、尺度变换、倒相。 利用MATLAB的符号运算功能以及符号绘图函数ezplot,可以直观的观察和分析连续信号的时域运算与时域变换。如下列代码 syms t; f=sym('(t+1)*(heaviside(t+1)-heaviside(t))'); f=f+sym('(heaviside(t)-heaviside(t-1))'); %定义信号符号表达式 ezplot(f,[-3,3]) %绘制信号波形 axis([-3,3,-1.2,1.2]) set(gcf,'color','w')