实验3----电涡流传感器位移特性实验
实验三电涡流传感器位移特性实验
一、实验类型:验证性实验。
二、实验目的
掌握电涡流传感器的工作原理和测量方法以及不同被测体材质对电涡流传感器特性的影响。
三、实验内容
搭建电涡流传感器性能测试电路,用铁、铜、铝三种不同的被测体圆片进行实验并记录输出电压,绘制关系曲线并分析。
四、实验原理
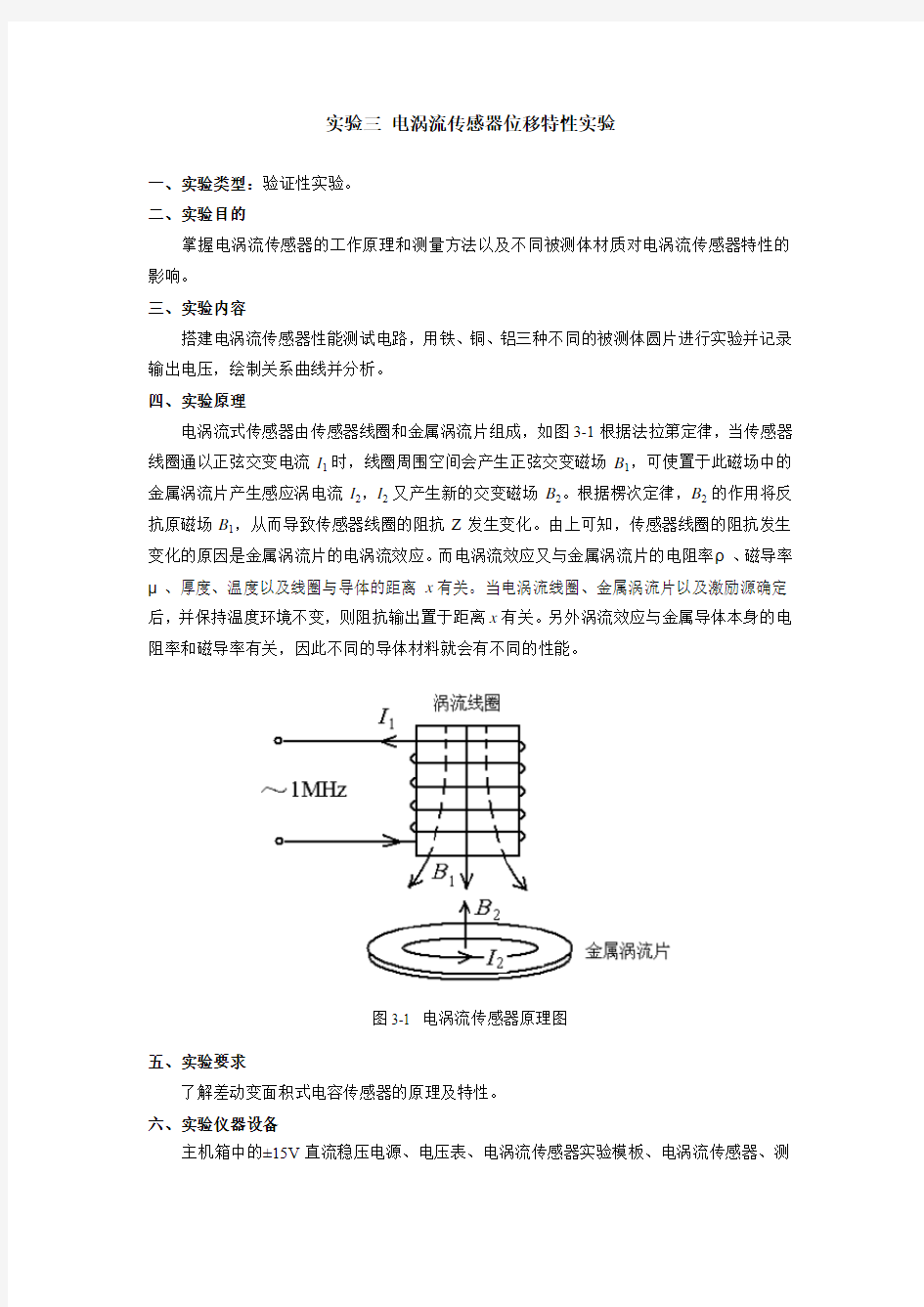
电涡流式传感器由传感器线圈和金属涡流片组成,如图3-1根据法拉第定律,当传感器线圈通以正弦交变电流I1时,线圈周围空间会产生正弦交变磁场B1,可使置于此磁场中的金属涡流片产生感应涡电流I2,I2又产生新的交变磁场B2。根据楞次定律,B2的作用将反抗原磁场B1,从而导致传感器线圈的阻抗Z发生变化。由上可知,传感器线圈的阻抗发生变化的原因是金属涡流片的电涡流效应。而电涡流效应又与金属涡流片的电阻率ρ、磁导率μ、厚度、温度以及线圈与导体的距离x有关。当电涡流线圈、金属涡流片以及激励源确定后,并保持温度环境不变,则阻抗输出置于距离x有关。另外涡流效应与金属导体本身的电阻率和磁导率有关,因此不同的导体材料就会有不同的性能。
图3-1 电涡流传感器原理图
五、实验要求
了解差动变面积式电容传感器的原理及特性。
六、实验仪器设备
主机箱中的±15V直流稳压电源、电压表、电涡流传感器实验模板、电涡流传感器、测
微头、被测体(铁、铜、铝圆片)。
七、预习要求
实验前学生必须自学有关仪器设备的使用方法及工作原理,明确实验内容及实验目的,须持实验预习报告后,方可进入实验室进行实验。
八、实验步骤
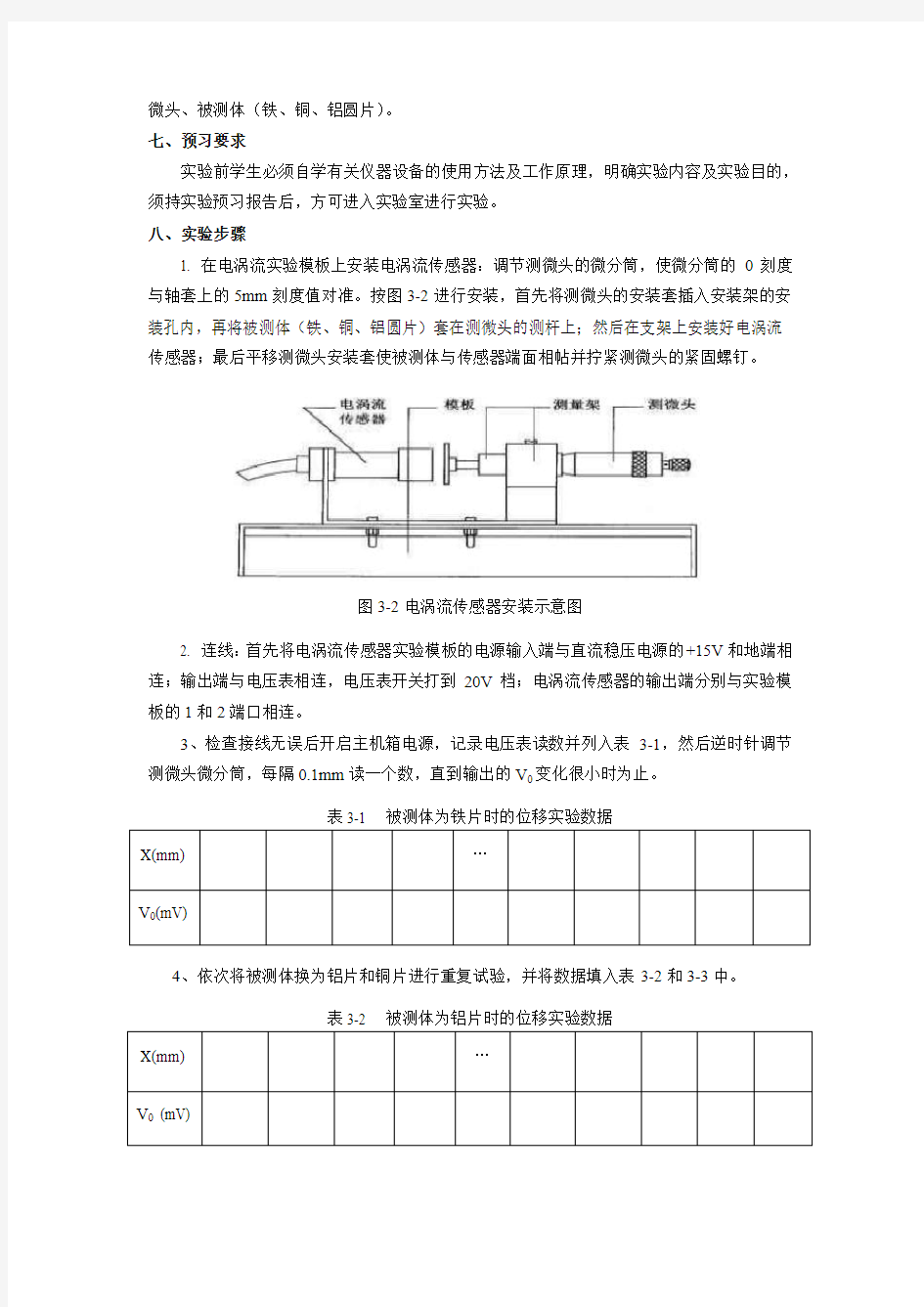
1. 在电涡流实验模板上安装电涡流传感器:调节测微头的微分筒,使微分筒的0刻度与轴套上的5mm刻度值对准。按图3-2进行安装,首先将测微头的安装套插入安装架的安装孔内,再将被测体(铁、铜、铝圆片)套在测微头的测杆上;然后在支架上安装好电涡流传感器;最后平移测微头安装套使被测体与传感器端面相帖并拧紧测微头的紧固螺钉。
图3-2电涡流传感器安装示意图
2. 连线:首先将电涡流传感器实验模板的电源输入端与直流稳压电源的+15V和地端相连;输出端与电压表相连,电压表开关打到20V档;电涡流传感器的输出端分别与实验模板的1和2端口相连。
3、检查接线无误后开启主机箱电源,记录电压表读数并列入表3-1,然后逆时针调节测微头微分筒,每隔0.1mm读一个数,直到输出的V0变化很小时为止。
表3-1 被测体为铁片时的位移实验数据
4、依次将被测体换为铝片和铜片进行重复试验,并将数据填入表3-2和3-3中。
表3-3 被测体为铜片时的位移实验数据
5. 根据表3-1、3-2和3-3的实验数据在同一坐标上面画出V—X实验曲线进行比较。实验完毕,关闭电源。
九、实验报告要求
1. 记录测微头移动时电压表的读数,并作出V-X曲线
2. 根据实验数据和曲线进行结果分析。
电涡流传感器
1、电涡流位移、振动传感器 OD9000/9000XL系列电涡流传感器 电涡流位移、振动传感器 第一节 概述 电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面的距离。它是一种非接触的线性化计量工具。电涡流传感器能准确测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。在高速旋转机械和往复式运动机械的状态分析,振动研究、分析测量中,对非接触的高精度振动、位移信号,能连续准确地采集到转子振动状态的多种参数。如轴的径向振动、振幅以及轴向位置。在所有与机械状态有关的故障征兆中,机械振动测量是最具权威性的,这是因为它同时含有幅值、相位和频率的信息。机械振动测量占有优势的另一个原因是:它能反应出机械所有的损坏,并易于测量。从转子动力学、轴承学的理论上分析,大型旋转机械的运动状态,主要取决于其核心—转轴,而电涡流传感器,能直接非接触测量转轴的状态,对诸如转子的不平衡、不对中、轴承磨损、轴裂纹及发生摩擦等机械问题的早期判定,可提供关键的信息。电涡流传感器以其长期工作可靠性好、测量范围宽、灵敏度高、分辨率高、响应速度快、抗干扰力强、不受油污等介质的影响、结构简单等优点,在大型旋转机械状态的在线监测与故障诊断中得到广泛应用。
第二节 探头、(延伸电缆)、前置器以及被测体构成基本工作系统。前置器中高频振荡电流通过延伸电缆流入探头线圈,在探头头部的线圈中产生交变的磁场。如果在这一交变磁场的有效范围内没有金属材料靠近,则这一磁场能量会全部损失;当有被测金属体靠近这一磁场,则在此金属表面产生感应电流,电磁学上称之为电涡流。与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到改变(线圈的有效阻抗),这一变化与金属体磁导率、电导率、线圈的几何形状、几何尺寸、电流频率以及头部线圈到金属导体表面的距离等参数有关。通常假定金属导体材质均匀且性能是线性和各项同性,则线圈和金属导体系统的物理性质可由金属导体的电导率б、磁导率ξ、尺寸因子τ、头部体线圈与金属导体表面的距离D、电流强度I和频率ω参数来描述。则线圈特征阻抗可用Z=F(τ, ξ, б, D, I, ω)函数来表示。通常我们能做到控制τ, ξ, б, I, ω这几个参数在一定范围内不变,则线圈的特征阻抗Z就成为距离D的单值函数,虽然它整个函数是一非线性的,其函数特征为“S”型曲线,但可以选取它近似为线性的一段。于此,通过前置器电子线路的处理,将线圈阻抗Z的变化,即头部体线圈与金属导体的距离D的变化转化成电压或电流的变化。输出信号的大小随探头到被测体表面之间的间距而变化,电涡流传感器就是根据这一原理实现对金属物体的位移、振动等参数的测量。
电涡流传感器的研究与探讨汇总
档案编号: 毕业设说明书题目:电涡流传感器的研究与探讨 系别:电气工程系 专业:生产过程自动化 班级: 姓名: 指导教师: (共18 页) 年月日
摘要:电涡流传感器是基于涡流效应的新型传感器。由于它具有结构简单、抗干扰能力强、测量精度高、非接触、响应速度快、不受油污等介质影响等优点,因而得到了广泛的应用。但目前的电涡流位移传感器存在着测量范围小,传感器存在非线性问题,这给传感器的应用造成了一定的影响。 本文首先通过对实验室所用的电涡流传感器实验模板的电路进行研究和优化,进而提高电路的抗干扰能力使测量结果的更加准确。其次针对电涡流位移传感器存在的测量范围小,传感器存在非线性问题的改善提出设想即:先对电涡流位移传感器用于位移检测的工作原理及应用进行分析,研究了线圈截面形状及参数变化对涡流传感器线性测量范围和灵敏度的影响;再从电路设计方面提高传感器的稳定性及抗干扰能力,从而为位移测量扩展量程打下基础;最后通过对电涡流传感器测位移实验进行分析处理得出电涡流传感器位移测量范围的扩展方法和改善电涡流传感器非线性问题的方法。 关键词:电涡流传感器; 位移测量; 非线性; 测量范围 Abstract: the eddy current sensor is a new type of sensor based on eddy current effect. Because it is simple in structure, strong anti-jamming capability, high accuracy, non-contact, fast response, not polluted advantages such media influence, and been widely used. But the current electricity eddy displacement sensor measurement range small, there exist nonlinear problem, the sensor to a sensor applications has caused some influence. This paper firstly eddy current sensor used in the laboratory experiment template circuit research and optimization, and improve the anti-interference ability of the circuit more accurate measurement results. Secondly according to the eddy current displacement sensor measurement range small, there exist nonlinear problem of sensor to improve it puts forward the idea of the eddy current is: first displacement detection sensors for displacement of the working principles and applications, research analyzed the coil cross-section
(五) 电涡流传感器位移实验
(五) 电涡流传感器位移实验 一、实验目的:了解电涡流传感器测量位移的工作原理和特性。 二、基本原理:通以高频电流的线圈产生磁场,当有导电体接近时,因导电体涡流效应产生涡流损耗,而涡流损耗 与导电体离线圈的距离有关,因此可以进行位移测量。 三、需用器件与单元:电涡流传感器实验模板、电涡流传感器、直流电源、数显单元、测微头、铁圆片。 四、实验步骤: 1、根据图3-7安装电涡流传感器。 图3-7 电涡流传感器安装示意图 2、传感器结构,这是一个扁平绕线圈。 3、将电涡流传感器输出线接入实验模板上标有L的两端插孔中,作为振荡器的一个元件(传感器屏蔽层接地)。 4、在测微头端部装上铁质金属圆片,作为电涡流传感器的被测体。 5、将实验模板输出端V 0与数显单元输入端Vi 相接。数显表量程切换开关选择电压20V 档。 6、用连接导线从主控台接入+15V 直流电源到模板上标有+15V 的插孔中。 7、使测微头与传感器线圈端部接触,开启主控箱电源开关,记下数显表读数,然后每隔0.2mm 读一个数,直到输 出几乎不变为止。将结果列入表3-4。 表3-4电涡流传感器位移X 与输出电压数据 8、根据表4-4数据,画出V-X 曲线,根据曲线找出线性区域及进行正、负位移测量时的佳工作点,试计 算量程为 1mm 、3mm 及5mm 时的灵敏度和线性度(可以用端基法或其它拟合直线)。 axis([10.5 18.5 0.66 7.9]); coords=[10.5:1:18.5,19.5;0.66,2.01,3.35,4.55,5.55,6.32,6.90,7.34,7.67,7.9]; grid; hold; plot(coords(1,:),coords(2,:),'*'); x=coords(1,:) y=coords(2,:)' 图3-8 电涡流传感器位移实验接线图
电涡流传感器
电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面的距离。它是一种非接触的线性化计量工具。电涡流传感器能准确测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。在高速旋转机械和往复式运动机械的状态分析,振动研究、分析测量中,对非接触的高精度振动、位移信号,能连续准确地采集到转子振动状态的多种参数。如轴的径向振动、振幅以及轴向位置。从转子动力学、轴承学的理论上分析,大型旋转机械的运动状态,主要取决于其核心—转轴,而电涡流传感器,能直接非接触测量转轴的状态,对诸如转子的不平衡、不对中、轴承磨损、轴裂纹及发生摩擦等机械问题的早期判定,可提供关键的信息。电涡流传感器以其长期工作可靠性好、测量范围宽、灵敏度高、分辨率高、响应速度快、抗干扰力强、不受油污等介质的影响、结构简单等优点,在大型旋转机械状态的在线监测与故障诊断中得到广泛应用。 一、电涡流传感器的基本原理 根据法拉第电磁感应原理,块状金属导体置于变化的磁场中或在磁场中作切割磁力线运动时,导体内将产生呈涡旋状的感应电流,此电流叫电涡流,以上现象称为电涡流效应。而根据电涡流效应制成的传感器称为电涡流式传感器。 前置器中高频振荡电流通过延伸电缆流入探头线圈,在探头头部的线圈中产生交变的磁场。当被测金属体靠近这一磁场,则在此金属表面产生感应电流,与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到改变(线圈的有效阻抗),这一变化与金属体磁导率、电导率、线圈的几何形状、几何尺寸、电流频率以及头部线圈到金属导体表面的距离等参数有关。通常假定金属导体材质均匀且性能是线性和各项同性,则线圈和金属导体系统的物理性质可由金属导体的电导率б、磁导率ξ、尺寸因子τ、头部体线圈与金属导体表面的距离D、电流强度I和频率ω参数来描述。则线圈特征阻抗可用Z=F(τ, ξ, б, D, I, ω)函数来表示。通常我们能做到控制τ, ξ, б, I, ω这几个参数在一定范围内不变,则线圈的特征阻抗Z就成为距离D的单值函数,虽然它整个函数是一非线性的,其函数特征为“S”型曲线,但可以选取它近似为线性的一段。于此,通过前置器电子线路的处理,将线圈阻抗Z 的变化,即头部体线圈与金属导体的距离D的变化转化成电压或电流的变化。输出信号的大小随探头到被测体表面之间的间距而变化,电涡流传感器就是根据这一原理实现对金属物体的位移、振动等参数的测量。 其工作过程是:当被测金属与探头之间的距离发生变化时,探头中线圈的Q值
电涡流位移传感器的原理
电涡流位移传感器的工作原理: 电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面距离。它是一种非接触的线性化计量工具。电涡流传感器能准确测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。 在高速旋转机械和往复式运动机 械状态分析,振动研究、分析测 量中,对非接触的高精度振动、 位移信号,能连续准确地采集到 转子振动状态的多种参数。如轴 的径向振动、振幅以及轴向位置。 电涡流传感器以其长期工作可靠 性好、测量围宽、灵敏度高、分辨率高等优点,在大型旋转机械状态的在线监测与故障诊断中得到广泛应用。 从转子动力学、轴承学的理论上分析,大型旋转机械的运动状态,主要取决于其核心—转轴,而电涡流传感器,能直接非接触测量转轴的状态,对诸如转子的不平衡、不对中、轴承磨损、轴裂纹及发生摩擦等机械问题的早期判定,可提供关键的信息。 根据法拉第电磁感应原理,块状金属导体置于变化的磁场中或在磁场中作切割磁力线运动时,导体将产生呈涡旋状的感应电流,此电流叫电涡流,以上现象称为电涡流效应。而根据电涡流效应制成的传感器称为电涡流式传感器。
前置器中高频振荡电流通过延伸电缆流入探头线圈, 在探头头部的线圈中产生交变的磁场。当被测金属体靠近这一磁场,则在此金属表面产生感应电流,与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到改变(线圈的有效阻抗),这一变化与金属体磁导率、电导率、线圈的几何形状、几何尺寸、电流频率以及头部线圈到金属导体表面的距离等参数有关。通常假定金属导体材质均匀且性能是线性和各项同性,则线圈和金属导体系统的物理性质可由金属导体的电导率б、磁导率ξ、尺寸因子τ、头部体线圈与金属导体表面的距离D、电流强度I和频率ω参数来描述。则线圈特征阻抗可用Z=F(τ, ξ, б, D, I, ω)函数来表示。通常我们能做到控制τ, ξ, б, I, ω这几个参数在一定围不变,则线圈的特征阻抗Z就成为距离D的单值函数,虽然它整个函数是一非线性的,其函数特征为“S”型曲线,但可以选取它近似为线性的一段。于此,通过前置器电子线路的处理,将线圈阻抗Z的变化,即头部体线圈与金属导体的距离D的变化转化成电压或电流的变化。输出信号的大小随探头到被测体表面之间的间距而
传感器实验报告 (2)
传感器实验报告(二) 自动化1204班蔡华轩 U201113712 吴昊 U201214545 实验七: 一、实验目的:了解电容式传感器结构及其特点。 二、基本原理:利用平板电容C=εA/d 和其它结构的关系式通过相应的结 构和测量电路可以选择ε、A、d 中三个参数中,保持二个参数不变,而 只改变其中一个参数,则可以有测谷物干燥度(ε变)测微小位移(变d)和测量液位(变A)等多种电容传感器。 三、需用器件与单元:电容传感器、电容传感器实验模板、测微头、相敏 检波、滤波模板、数显单元、直流稳压源。 四、实验步骤: 1、按图6-4 安装示意图将电容传感器装于电容传感器实验模板上。 2、将电容传感器连线插入电容传感器实验模板,实验线路见图7-1。图 7-1 电容传感器位移实验接线图 3、将电容传感器实验模板的输出端V01 与数显表单元Vi 相接(插入主控 箱Vi 孔),Rw 调节到中间位置。 4、接入±15V 电源,旋动测微头推进电容传感器动极板位置,每间隔0.2mm 图(7-1) 五、思考题: 试设计利用ε的变化测谷物湿度的传感器原理及结构,并叙述一 下在此设计中应考虑哪些因素? 答:原理:通过湿度对介电常数的影响从而影响电容的大小通过电压表现出来,建立起电压变化与湿度的关系从而起到湿度传感器的作用;结构:与电容传感器的结构答大体相同不同之处在于电容面板的面积应适当增大使测量灵敏度更好;设计时应考虑的因素还应包括测量误差,温度对测量的影响等
六:实验数据处理 由excle处理后得图线可知:系统灵敏度S=58.179 非线性误差δf=21.053/353=6.1% 实验八直流激励时霍尔式传感器位移特性实验 一、实验目的:了解霍尔式传感器原理与应用。 二、基本原理:霍尔式传感器是一种磁敏传感器,基于霍尔效应原理工作。 它将被测量的磁场变化(或以磁场为媒体)转换成电动势输出。 根据霍尔效应,霍尔电势UH=KHIB,当霍尔元件处在梯度磁场中 运动时,它就可以进行位移测量。图8-1 霍尔效应原理 三、需用器件与单元:霍尔传感器实验模板、霍尔传感器、直流源±4V、± 15V、测微头、数显单元。 四、实验步骤: 1、将霍尔传感器按图8-2 安装。霍尔传感器与实验模板的连接 按图8-3 进行。1、3 为电源±4V,2、4 为输出。图8-2 霍尔 传感器安装示意图 2、开启电源,调节测微头使霍尔片在磁钢中间位置再调节RW2 使数显表指示为零。
电涡流传感器的位移特性实验报告
电涡流传感器的位移特性实验报告
一、实验目的 了解电涡流传感器测量位移的工作原理和特性。二、实验仪器 电涡流传感器、铁圆盘、电涡流传感器模块、测 微头、直流稳压电源、数显直流电压表二、实验原理通过高频电流的线圈产生磁场,当有导电体接近时,因导电体涡流效应产生涡流损耗,而涡流损耗与导电体离线圈的距离有关,因此可以进行位移测量四、实验内容与步骤 1 ?按图2-1安装电涡流传感器。 图2-1传感器安装示意图 器的被测体。调节测微头?L 属圆盘的平面贴到电涡流传感器的探测端,使铁质金,固定 测微头。 —模損t
图2-2电涡流传感器接线示意图 X (m m ) 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 .0 U o ( 0.0 0.2 0.3 0.5 0.6 0.8 0.9 1.1 1.3 1.4 V ) 2 1 7 3 7 3 9 4 0 h 5 X (m m ) 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2.0 U O ( 1.6 1.8 1.9 2.1 2.3 2.4 2.6 2.8 3.0 3.2 々 n ffim T >< 匕?[ : wk 一一「 Q Vi 电福流传感器实验樟机 3 ?传感器连接按图 2-2,实验模块输出端 入端也 相接 压 20V 档,, 导线从实验台上接入+15V 电源 ” 4合上实验台上电源开关,记下数显表读 数,然后每隔0.1mm 读一个数,直到输出几乎 不变为止。将结果列入 表2-1。 表2-1 铁质被测体 程切 关选择 压表量号 测犠咲 岸顽『 Vc > p : 喘千粧卸丄 旳分 3
电涡流传感器位移实验
实验二十电涡流传感器位移实验 一、实验目的 了解电涡流传感器测量位移的工作原理和特性。 二、实验内容 用铁圆片检测电涡流传感器的位移特性。 三、实验仪器 电涡流传感器实验模板、电涡流传感器、直流电源、数显单元、测微头、铁圆片。 四、实验原理 电涡流式传感器由平面线圈和金属涡流片组成,当线圈中通以高频交变电流后,与其平行的金属片上感应产生电涡流,电涡流的大小影响线圈的阻抗Z,而涡流的大小与金属涡流片的电阻率、导磁率、厚度、温度以及与线圈的距离X有关。当平面线圈、被测体(涡流片)、激励源已确定,并保持环境温度不变,阻抗Z只与X距离有关。将阻抗变化经涡流变换器变换成电压V输出,则输出电压是距离X的单值函数。 五、实验注意事项 被测体与涡流传感器测试探头平面尽量平行,并将探头尽量对准被测体中间,以减少涡流损失。 六、实验步骤 1、根据图20-1安装电涡流传感器。 2、观察传感器结构,这是一个平绕线圈。 3、将涡流传感器输出线接入实验模板上标有L的两端插孔中,作为振荡器的一个元件。
图20-1 电涡流传感器安装示意图 图8-2 电涡流传感器位移实验接线图 4、在测微头端部装上铁质金属圆片,作为电涡流传感器的被测体。 5、将实验模板输出端Vo与数显单元输入端Vin相接。数显表量程切换到选择电压20V 档。 6、用连结导线从主控台接入15V直流电源接到模板上标有+15V的插孔中。 7、使测微头与传感器线圈端部接触,开启主控台电源开关,此时数显表读数为最小,然后每隔0.1mm读一个数,直到输出几乎不变为止。将结果列入下表。(实验结论:1、本实验每隔0.1mm是相对位置,起始值看做0.1mm即可,无需从测微头上读绝对位置。每旋转0.1mm,输出的电压的增量应该大致相等。2、由于学生做实验可能不能正确的找到起始点, 导致采集的数据不在线性范围内,从而影响数据采集的线性度,可以让学生从选取的起始
电涡流传感器基本原理
电涡流传感器 原理图 1、什么是电涡流效应? 电感线圈产生的磁力线经过金属导体时,金属导体就会产生感应电流,且呈闭合回路,类似于水涡流形状,故称之为电涡流也叫做电涡流效应,其实是电磁感应原理的延伸。 注意:电涡流传感器要求被测体必须是导体。 传感器探头里有小型线圈,由控制器控制产生震荡电磁场,当接近被测体时,被测体表面会产生感应电流,而产生反向的电磁场。这时电涡流传感器根据反向电磁场的强度来判断与被测体之间的距离。2、电涡流传感器的工作原理与结构
。 传感器线圈由高频信号激励,使它产生一个高频交变磁场φi,当被测导体靠近线圈时,在磁场作用范围的导体表层,产生了与此磁场相交链的电涡流ie,而此电涡流又将产生一交变磁场φe阻碍外磁场的变化。从能量角度来看,在被测导体内存在着电涡流损耗(当频率较高时,忽略磁损耗)。能量损耗使传感器的Q值和等效阻抗Z 降低,因此当被测体与传感器间的距离d改变时,传感器的Q值和等效阻抗Z、电感L均发生变化,于是把位移量转换成电量。这便是电涡流传感器的基本原理 3、电涡流传感器的实际应用 电涡流传感器测量齿轮转速的应用
4、使用电涡流传感器时的注意事项 对被测体的要求 为了防止电涡流产生的磁场影响仪器的正常输出安装时传感器头部四周必须留有一定范围的非导电介质空间,如果在某一部位要同时安装两个以上的传感器,就必须考虑是否会产生交叉干扰,两个探头之间一定要保持规定的距离,被测体表面积应为探头直径3倍以上,当无法满足3倍的要求时,可以适当减小,但这是以牺牲灵敏度为代价的,一般是探头直径等于被测体表面积时,灵敏度降低至70%,所以当灵敏度要求不高时可适当缩小测量表面积。
电涡流位移传感器(蒋维)
第一节系统简介 1、为何采用电涡流位移传感器 ●电涡流位移传感器能测量被测体(必须是金属导体)与探头端面的相对位置。 ●电涡流位移传感器长期工作可靠性好、灵敏度高、抗干扰能力强、非接触测量、响应速度快、不受油水等介质的影响,常被用于对大型旋转机械的轴位移、轴振动、轴转速等参数进行长期实时监测,可以分析出设备的工作状况和故障原因,有效地对设备进行保护及进行预测性维修。 ●从转子动力学、轴承学的理论上分析,大型旋转机械的运行状态主要取决于其核心——转轴,而电涡流位移传感器能直接测量转轴的状态,测量结果可靠、可信。过去对于机械的振动测量采用加速度传感器或速度传感器,通过测量机壳振动,间接地测量转轴振动,测量结果的可信度不高。 2、系统组成 系统主要包括探头、延伸电缆(用户可以根据需要选择)、前置器。 图1传感器系统组成 第二节系统的工作原理 传感器系统的工作机理是电涡流效应。当接通传感器系统电源时,在前置器内会产生一个高频电流信号,该信号通过电缆送到探头的头部,在头部周围产生交变磁场H1。如果在磁场H1的范围内没有金属导体材料接近,则发射到这一范围内的能量都会全部释放;反之,如果有金属导体材料接近探头头部,则交变磁场H1将在
导体的表面产生电涡流场,该电涡流场也会产生一个方向与H1相反的交变磁场H2。由于H2的反作用,就会改变探头头部线圈高频电流的幅度和相位,即改变了线圈的电感。这种变化既与电涡流效应有关,又与静磁学效应有关,即与金属导体的电导率、磁导率、几何形状、线圈几何参数、激励电流频率以及线圈到金属导体的距离等参数有关。假定金属导体是均质的,其性能是线性和各向同性的,则线圈——金属导体系统的物理性质通常可由金属导体的磁导率μ、电导率σ、尺寸因子r,线圈与金属导体距离d,线圈激励电流强度I和频率ω等参数来描述。因此线圈的电感可用函数L=F(μ,σ,r,I,ω,d)来表示。 图2电涡流作用原理图 第三节结构说明 1、探头 探头对正被测体表面,它能精确地探测出被测体表面相对于探头端面间隙的变化。通常探头由线圈、头部、壳体、高频电缆、高频接头组成,其典型结构见图3所示。 图3探头典型结构 线圈是探头的核心,它是整个传感器系统的敏感元件,线圈的物理尺寸和电气参数决定传感器系统的线性量程以及探头的电气参数稳定性。
本特利bently电涡流传感器工作原理
本特利bently电涡流传感器工作原理 本特利bently电涡流传感器工作原理 一、本特利bently电涡流传感器常用分类 我们常接触到的本特利bently涡流传感器有直径5mm涡流传感器、8mm涡流传感器、11mm涡流传感器、14mm涡流传感器、25mm涡流传感器、50mm差胀传感器、3300耐高温电涡流传感器几种,其中5mm探头和14mm探头不常用。每个传感器系统都由探头、延长线和前置器组成,本特利探头、延长线和前置器具有完全的可互换性,只要部件号一致,各部分可以互换。 二、本特利bently电涡流传感器工作原理 电涡流传感器是以高频电涡流效应为原理的非接触式位移、振动传感器,其基本原理是探头、延伸电缆、前置器以及被测体构成基本工作系统。 前置器中高频振荡电流通过延伸电缆流入探头线圈,在探头头部的线圈中产生交变的磁场。如果在这一交变磁场的有效范围内没有金属材料靠近,则这一磁场能量会全部损失;当有被测金属体靠近这一磁场,则在此金属表面产生感应电流,电磁学上称之为电涡流。与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到改变(线圈的有效阻抗),这一变化与金属体磁导率、电导率、线圈的几何形状、几何尺寸、电流频率以及头部线圈到金属导体表面的距离等参数有关。 通常假定金属导体材质均匀且性能是线性和各项同性,则线圈和金属导体系统的物理性质可由金属导体的电导率б、磁导率ξ、尺寸因子τ、头部体线圈与金属导体表面的距离D、电流强度I和频率ω参数来描述。则线圈特征阻抗可用Z=F(τ, ξ, б, D, I, ω)函数来表示。通常我们能做到控制τ, ξ, б, I, ω这几个参数在一定范围内不变,则线圈的特征阻抗Z就成为距离D的单值函数,虽然它整个函数是一非线性的,其函数特征为S型曲线,但可以选取它近似为线性的一段。于此,通过前置器电子线路的处理,将线圈阻抗Z的变化,即头部
电涡流位移传感器的原理及其静态标定方法
电涡流位移传感器的原理及其静态标定方法电涡流是20世纪70年代以后发展较快的一种新型传感器,它广泛的应用在位移震动检测、金属材质鉴别,无损探伤等技术领域。 实验目的: 了解电涡流位移传感器的结构和工作原理。 了解电涡流位移传感器的静态标定方法。 实验原理 结构:变间隙式是最常用的一种电涡流传感器形式,它的结构很简单,由一个扁平线圈固定在框架上构成。线圈用高强度漆包铜线或银线绕成,用粘结剂粘在框架端部或是绕指在框架槽内。线圈框架应采用损耗小、电性能好、热膨胀系数小的材料,常用高频陶瓷、聚四氟乙烯等。由于激励频率较高,对所用的电缆和插头也要充分重视,一般使用专用的高频电缆和插头。 工作原理:在传感器线圈中通以高频电流,则在线圈中产生高频交变磁场。当到点被测金属板接近线圈,并置于线圈的磁场范围内,交变磁场在金属板的表面层内产生感应电流,即电涡流。电涡流又产生一个反向的磁场,减弱了线圈的原磁场,从而导致线圈的电感量、阻抗和品质因素发生变化,这些参数的变化与导体的几何形状、电导率、线圈的几何参数、电流的频率以及线圈与被测导体间的距离有关。如果控制上述参数的变化,在其他条件不变的情况下,仅是线圈与金属板之间距离的单值函数,从而达到测量位移间隙的目的。 测量电路 当传感器接近被测导体时,损耗功率增大,回路失谐,输出电压相应变小。这样,在一定范围内,输出电压幅值与间隙呈近似线性关系。由于输出电压的频率始终恒定,因此称为定频幅式。这种电路采用适应晶体振荡器,旨在获得高稳定度频率的高频激励信号,以保证
稳定的输出。 实验仪器与材料 电涡流位移传感器静态标定系统 Hz-8500探头前置器 8511型电涡流探头 电涡流传感器测量装置 高精度数字万用表。 实验内容: 实验一:被测金属板采用铝质板,测量U-x 关系曲线。 实验二:被测金属板仍采用铝质板,但直径较小,测量U-x 关系曲线。 实验三:被测金属板采用铁板,测量U-x 关系曲线。 5、实验数据: 实验一数据: 6、实验要求: 1、画出(实验一)中的U-x 关系曲线,确定传感器的线性工作范围计算传感器的灵敏度。答:线性工作范围:由画出的U-X关系曲线可以看出其线性工作范围在0~13 灵敏度:(15.4-1.78)/13=1.048
电涡流式传感器
电涡流式传感器 根据初中学的法拉第电磁感应原理,块状金属导体置于变化的磁场中,导体内将产生呈涡旋状的感应电流,称之为电涡流或涡流,这种现象称为涡流效应。 电涡流传感器是利用电涡流效应,将位移、温度等非电量转换为阻抗的变化或电感的变化从而进行非电量电测的。 目前生产的变间隙位移传感器,器量程范围为300m~800mm。 将块状金属导体置于通有交变电流的传感器线圈磁场中。根据法拉第电磁感应原理,由于电流的变化,在线圈周围就产生一个交变磁场,当被测导体置于该磁场范围之内,被测导体内便产生电涡流,电涡流也将产生一个新磁场,和方向相反,抵消部分原磁场,从而导致线圈的电感量、阻抗和品质因素发生变化。
一、电涡流式传感器的结构 电涡流式传感器结构比较简单,主要由一个安置在探头壳体的扁平圆形线圈构成。 二、电涡流式传感器的测量电路 利用电涡流式变换元件进行测量时,为了得到较强的电涡流效应,通常激磁线圈工作在较高频率下,所以信号转换电路主要有调幅电路和调频电路两种。 调幅式(AM)电路
调频式(FM)电路 调频式电路(100kHz~1MHz)结构如图所示: 当电涡流线圈与被测体的距离x改变时,电涡流线圈的电感量L 也随之改变,引起LC振荡器的输出频率变化,此频率可直接用计算机测量。 如果要用模拟仪表进行显示或记录时,必须使用鉴频器,将△?转换为电压U0。 三、电涡流式传感器的应用电路 电涡流式传感器具有测量范围大、灵敏度高、结构简单、抗干扰能力强和可以非接触测量等优点,被广泛应用于工业生产和科学研究各个领域中。 1、电磁炉
电磁炉是我们日常生活中必备的家用电器之一,涡流传感器是其核心器件之一,高频电流通过励磁线圈,产生交变磁场;在铁质锅底会产生无数的电涡流,使锅底自行发热,烧开锅内的食物。 2、电涡流探雷器 3、电涡流式接近开关 接近开关又称无触点行程开关。它能在一定的距离(几毫米至几十毫米)内检测有无物体靠近。 当物体接近到设定距离时,就可发出“动作”信号。接近开关的核心部分是“感辨头”,它对正在接近的物体有很高的感辨能力。这种接近开关只能检测金属。
电涡流传感器测量振动实验报告
实验二十一 被测体面积大小对电涡流传感器的特性影响实验 一、实验目的: 了解电涡流传感器在实际应用中其位移特性与被测体的形状和尺寸有关。 二、基本原理: 电涡流传感器在实际应用中,由于被测体的形状,大小不同会导致被测体上涡流效应的不充分,会减弱甚至不产生涡流效应,因此影响电涡流传感器的静态特性,所以在实际测量中,往往必须针对具体的被测体进行静态特性标定。 三、需用器件与单元: 直流源、电涡流传感器、测微头、电涡流传感器实验模板、不同面积的铝被测体、数显单元。 四、实验步骤: 1.按图2-1安装电涡流传感器。 图2-1传感器安装示意图 2.在测微头端部装上铝质金属(小圆盘与小圆柱体),作为电涡
流传感器的被测体。调节测微头,使铁质金属圆盘的平面贴到电涡流传感器的探测端,固定测微头。 图2-2 电涡流传感器接线示意图 3.传感器连接按图2-2,实验模块输出端Uo与直流电压表输入端U i相接。直流电压表量程切换开关选择电压20V档,模块电源用2号导线从实验台上接入+15V电源。 4.合上实验台上电源开关,记下数显表读数,然后每隔0.1mm 读一个数,直到输出几乎不变为止。将结果列入表2-1。
(1)由上图可得系统灵敏度:S=ΔV/ΔW=3.1977V/mm (2)由上图可得非线性误差: 当x=1mm时: Y=3.1977×1+2.4036=5.6013V Δm=Y-5.70=-0.0987V yFS=10.69V δf=Δm/yFS×100%=0.923% 当x=3mm时: Y=3.1977×3+2.4036=12.00V Δm=Y-11.2=0.8V yFS=10.69V δf=Δm/yFS×100%=7.48% 表2-3 铝质被测体(圆柱体)
位移电涡流传感器测量电路设计-)
位移电涡流传感器测量电路设计-)
————————————————————————————————作者:————————————————————————————————日期:
成绩评定: 传感器技术 课程设计 题目位移电涡流传感器测量电路设计
摘要 电涡流传感器由于具有对介质不敏感、非接触的特点,广泛应用于对金属的位移检测中。为扩大电涡流传感器的测量范围,采用恒频调幅式测量电路,引用指数运算电路作为非线性补偿环节。利用Matlab计算软件辅助设计了直径为60mm电涡流传感器探头,并结合测量电路进行实验。实验结果表明最大测量范围接近90mm,验证了该系统工作的稳定性,证明设计达到了预期效果。关键词:电涡流传感器;测量电路;大位移;线性化
目录 一、设计目的------------------------- 1 二、设计任务与要求--------------------- 1 2.1设计任务 ----------------------- 1 2.2设计要求 ----------------------- 1 三、设计步骤及原理分析 ----------------- 1 3.1设计方法 ----------------------- 1 3.2设计步骤 ----------------------- 2 3.3设计原理分析 -------------------- 6 四、课程设计小结与体会 ----------------- 6 五、参考文献-------------------------- 6
一、设计目的 1.了解电涡流传感器测量位移的工作原理和特性。 2.了解电涡流传感器的前景及用途 二、设计任务与要求 2.1设计任务 扩大电涡流传感器的测量范围,采用恒频调幅式测量电路,引用指数运算电 路作为非线性补偿环节。验证了该系统工作的稳定性,证明设计达到了预期效果。 2.2设计要求 1. 工作在常温、常压、稳态、环境良好; 2. 设计传感器应用电路并画出电路图; 3. 应用范围:测量物体的位移。 三、设计步骤及原理分析 3.1设计方法 电涡流传感器具有体积小、非接触、对介质不敏感的特点,被广泛应用于对金属位移等的测量中。尽管用电涡流传感器非接触测量位移已经得到广泛的应用,但是测量位移的线性范围受到传感器线圈直径的限制,位移测量范围为线圈直径的1/3~1/5,大直径的传感器,其测量范围最大可以接近到直径的1/2。在许多领域希望能进一步扩大传感器的测量范围,以满足大位移的非接触测量。文中采用指数运算电路作为非线性补偿环节来改善传感器原有的传输特性,扩大传感器测量范围。 由电磁感应定律可知:闭合金属导体中的磁通发生变化时,就会在导体中产生闭合的感应电涡流,阻碍磁通量的变化。如图1所示,传感线圈由交流信号激励,在产生焦耳热的同时,又要产生磁滞损耗,它们造成交变磁场能量的损失,进而使传感器的等效阻抗Z发生变化。 影响阻抗Z的因素有被测导体的电导率、磁导率、线圈的激励频率f及传感器与被测导体间的位移x等,只要保证这些影响因素只有位移x变化,其他都保持
电涡流传感器的位移特性实验报告完整版
电涡流传感器的位移特 性实验报告 Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】
实验十九电涡流传感器的位移特性实验 一、实验目的 了解电涡流传感器测量位移的工作原理和特性。 二、实验仪器 电涡流传感器、铁圆盘、电涡流传感器模块、测微头、直流稳压电源、数显直流电压表 三、实验原理 通过高频电流的线圈产生磁场,当有导电体接近时,因导电体涡流效应产生涡流损耗,而涡流损耗与导电体离线圈的距离有关,因此可以进行位移测量。 四、实验内容与步骤 1.按图2-1安装电涡流传感器。 图2-1传感器安装示意图 2.在测微头端部装上铁质金属圆盘,作为电涡流传感器的被测体。调节测微头,使铁质金属圆盘的平面贴到电涡流传感器的探测端,固定测微头。 图2-2 电涡流传感器接线示意图 3.传感器连接按图2-2,实验模块输出端Uo与直流电压表输入端U 相 i 接。直流电压表量程切换开关选择电压20V档,模块电源用2号导线从实验台上接入+15V电源。 4.合上实验台上电源开关,记下数显表读数,然后每隔读一个数,直到输出几乎不变为止。将结果列入表2-1。 5.根据上表数据,画出V-X曲线,根据曲线找出线性区域及进行正、负位移测量时的最佳工作点(即曲线线性段的中点),试计算测量范围为1mm与 3mm时的灵敏度和线性度 (1)由上图可得系统灵敏度:S=ΔV/ΔW=mm (2)由上图可得非线性误差: 当x=1mm时: Y=×=
Δm?== yFS= δf=Δm/yFS×100%=% 当x=3mm时: Y=×= Δm?== yFS= δf=Δm/yFS×100%=% 五、思考题 1、电涡流传感器的量程与哪些因素有关,如果需要测量±5mm的量程应如何设计传感器 答:量程与线性度、灵敏度、初始值均有关系。如果需要测量±5mm的量程应使传感器在这个范围内线性度最好,灵敏度最高,这样才能保证的准确度。 2、用电涡流传感器进行非接触位移测量时,如何根据使用量程选用传感器答:根据需要测量距离的大小,一般距离较大要求量程较大,且灵敏度要求不会太高,而且量程有正负;相反需要测量的距离较小,则对灵敏度要求较高,量程不需要太大,这样既能满足要求,同时又保证了测量的精确度。 实验二十被测体材质对电涡流传感器特性影响 一、实验目的 了解不同的被测体材料对电涡流传感器性能的影响。 二、实验原理 涡流效应与金属导体本身的电阻率和磁导率有关,因此不同的材料就会有不同的性能。在实际应用中,由于被测体的材料、形状和大小不同会导致被测体上涡流效应的不充分,会减弱甚至不产生涡流效应,因此影响电涡流传感器的静态特性,所以在实际测量中,往往必须针对具体的被测体进行静态特性标定。 三、实验仪器 除与实验十九相同外,另加铜和铝的被测体圆盘 四、实验内容与步骤 与实验十九相同 将铁质金属圆盘分别换成铜质金属圆盘和铝质金属圆盘。将实验数据分别记入下面表2-2、2-3。
电涡流位移传感器原理与应用-(38003)
电涡流位移(振动)传感器原理与应用电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面的距离。它是一种非接触的线性化计量工具。电涡流传感器能准确测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。在高速旋转机械和往复式运动机械的状态分析,振动研究、分析测量中,对非接触的高精度振动、位移信号,能连续准确地采集到转子振动状态的多种参数。如轴的径向振动、振幅以及轴向位置。从转子动力学、轴承学的理论上分析,大型旋转机械的运动状态,主要取决于其核心—转轴,而电涡流传感器,能直接非接触测量转轴的状态,对诸如转子的不平衡、不对中、轴承磨损、轴裂纹及发生摩擦等机械问题的早期判定,可提供关键的信息。电涡流传感器以其长期工作可靠性好、测量范围宽、灵敏度高、分辨率高、响应速度快、抗干扰力强、不受油污等介质的影响、结构简单等优点,在大型旋转机械状态的在线监测与故障诊断中得到广泛应用。 一、电涡流传感器的基本原理 根据法拉第电磁感应原理,块状金属导体置于变化的磁场中或在磁场中作切割磁力线运动时,导体内将产生呈涡旋状的感应电流,此电流叫电涡流,以上现象称为电涡流效应。而根据电涡流效应制成的传感器称为电涡流式传感器。 前置器中高频振荡电流通过延伸电缆流入探头线圈,在探头头部的线圈中产生交变的磁场。当被测金属体靠近这一磁场,则在此金属表面产生感应电流,与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到改变(线圈的有效阻抗),这一变化与金属体磁导率、电导率、线圈的几何形状、几何尺寸、电流频率以及头部线圈到金属导体表面的距离等参数有关。通常假定金属导体材质均匀且性能是线性和各项同性,则线圈和金属导体系统的物理性质可由金属导体的电导率б、磁导率ξ、尺寸因子τ、头部体线圈与金属导体表面的距离D、电流
传感器的位移测量实验
传感器的位移测量实验 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】
位移测量实验报告 专业班级姓名实验仪器编号实验日期一、实验目的 掌握常用的位移传感器的测量原理、特点及使用,并进行静态标定。 二、实验仪器 CSY10B型传感器系统实验仪。 三、实验内容 (一)电涡流传感器测位移实验· 1、测量原理 扁平线圈中通以交变电流,与其平行的金属片中产生电涡流。电涡流的大小影响线圈的阻抗Z。 Z = f(ρ,μ,ω,x)。 不同的金属材料有不同的ρ、μ,线圈接入相应的电路中,用铁、铝两种不同的金属材料片分别标定出测量电路的输出电压U与距离x的关系曲线。 2、测试系统组建 电涡流线圈、电涡流变换器(包括振荡器、测量电路及低通滤波输出电路)、测微头、电压表、金属片。 3、试验步骤 ①安装传感器测微头;②连接电路;③依次用铁片、铝片进行位移测量。
4、数据分析与讨论 画出输入输出关系曲线,确定量程,非线性误差,在测量范围内计算灵敏度,进行误差分析。
(二)光纤传感器测位移实验 1、测量原理 反射式光纤传感器属于结构型, 工作原理如图。 反射式位移传感器原理 当发光二极管发射红外光线经光纤照射至反射体,被反射的光经接收光纤至光电元件。经光电元件转换为电信号。经相应的测量电路测出照射至光电元件的光强的变化。 2、组建测试系统 光纤、光电元件、发光二级管、光电变换测量电路、数字电压表、反射体(片)、测微头。 3、实验步骤 ①观察光纤结构;②安装光纤探头、反射片;③连接电路;④旋动测微仪测位移。 X(mm) U(V)`` X(mm) U(V)`` X(mm) U(V)`` X(mm) U(V)`` 4、数据分析与讨论
CWY-D0电涡流位移传感器说明书
CWY-D0系列电涡流位移传感器是CWY系列产品的全新升级,采用更新工艺技术及零件组件,在继承CWY-D0系列稳定可靠的优良性能的前提下,全面提升产品外观及内部品质,可完全替代美国本特利(BN)公司3300、3300XL系列产品。 一、系统组成 如下图所示,系统主要包括前置器、延伸电缆(用户可以根据需要选择)、探头和附件。 二、升级亮点 1.电缆采用蓝色氟塑料绝缘的射频同轴电缆,可选用不锈钢软管铠装,以保护电缆不易被损坏。 2.探头、延伸电缆和前置器都带有防腐蚀的符合美国军用规范MIL-C-39012的镀金铜接头。这些接头只需用手指紧固(接头会自动“锁住”),特殊的机械锁紧装置能防止连接松动。接头在安装或拆卸时不需要特殊的工具。
3.探头整体各部件通过机械变形联接,在恶劣环境中可以保证探头的稳定性和可靠性。 4.前置器提供两种安装方式:
底板安装,51mm×51mm,采用四个M4×12GB29-76螺栓安装(产品附件); 导轨安装,可以方便地安装在标准35mm导轨上。 5.前置器采用三端SpringLoc端子镶嵌固定,直接与内部电路连接,确保连接可靠性。 三、技术指标 1.线性量程、线性范围、线性中点、非线性误差、最小被测面 ※非线性误差指实际输出值与理论值(按标准特性方程计算)最大误值。 2.平均灵敏度(线性范围内输出变化除线性范围)
平均灵敏度误差:≤±5% 3.动态特性 频响:0~10kHz 幅频特性:0~1kHz衰减小于1%,10kHz衰减小于5% 相频特性:0~1kHz相位差小于-10°,10kHz相位差小于-100° 4.互换性误差≤5% 5.工作温度 探头:工作温度-20℃~+150℃温漂≤0.05%/°C 前置器:工作温度0℃~+100℃温漂≤0.05%/°C 6.工作介质:空气、油、水。 7.探头最大工作压力:12Mpa 四、型号选型 探头选型