ERDAS LPS
Leica Photogrammetry Suite –LPS
数字摄影测量及遥感处理软件系列
当今,数字摄影测量和制图生产的专家正在面临越来越大的压力:在较少的时间内生产越来越多的产品,但是又不能以降低精度为代价。大多数的数字摄影测量软件,虽然可以提供强大的功能和足够的精度时,操作却变得复杂、难用,不但价格昂贵,也会降低生产效率。
永远不用怀疑 Leica 数字摄影测量软件的精度
我们都知道精度在摄影测量行业的重要性,这就是Leica 数字摄影测量系统为什么能把摄影测量和影像处理数据处理得那么完美的原因,特点如下:
z流程化的处理方式提高了系统的完整性,简单易学
z点的自动量测和地形自动提取
z子像素立体显示和点位分配
z公认并被证实的空中三角测量
z详尽的精度报告
z优秀的数据精度检测方法
对于Leica数字摄影测量系统来说,精度永远不需要怀疑。
Leica 数字摄影测量软件将生产效率提高到更高水平
在当今对效率要求越来越高的环境下,只生产高精度的数据已经不够了。过程-流程驱动是提高生产力的关键。LPS的流程管理使得像自动内定向,自动连接点量测,自动地形提取和智能多影像装载这些工作变得简单,能够让你从多次的重复工作当中解脱出来,专注于数据的质量。
LPS 也会帮助你在其它方面节省时间。简洁、明了的界面易学、易用,按照工作流程设计的工具栏能够引导操作,提供从创建工程开始到最终所需做的一切。数据的强大兼容性使得多种从其它主流摄影测量软件导出的数据可以直接在徕卡摄影测量系统中使用。 LPS 过程驱动工具栏和项目管理者形成了流线型生产流程。 .
LPS 概述
Leica Photogrammetry Suite –LPS 是徕卡公司最新推出的数字摄影测量及遥感处理软件系列。 LPS 为影像处理及摄影测量提供了高精度及高效能的生产工具。它可以处理各种航天(最常用的卫星影像包括QuickBuid、IKONOS、SPOT5、及LANDSAT等等)及航空(扫描航片、ADS40数字影像)的各类传感器影像定向及空三加密,处理各种数字影像格式,黑/白、彩色、多光谱及高光谱等各类数字影像。LPS的应用还包括矢量数据采集、数字地
模生成、正射影像镶嵌及遥感处理,它是第一套集遥感与摄影测量在单一工作平台的软件系列。
Leica公司是这个领域中的先导。LPS软件系统是从Leica的摄影测量、遥感和地球空间影像软件的核心发展而成,但却更有广度、更为丰富。LPS是使用方便,精度更高的软件,在全球100多个国家都有丰富经验的工程技术人员提供技术支持。
LPS产品结构
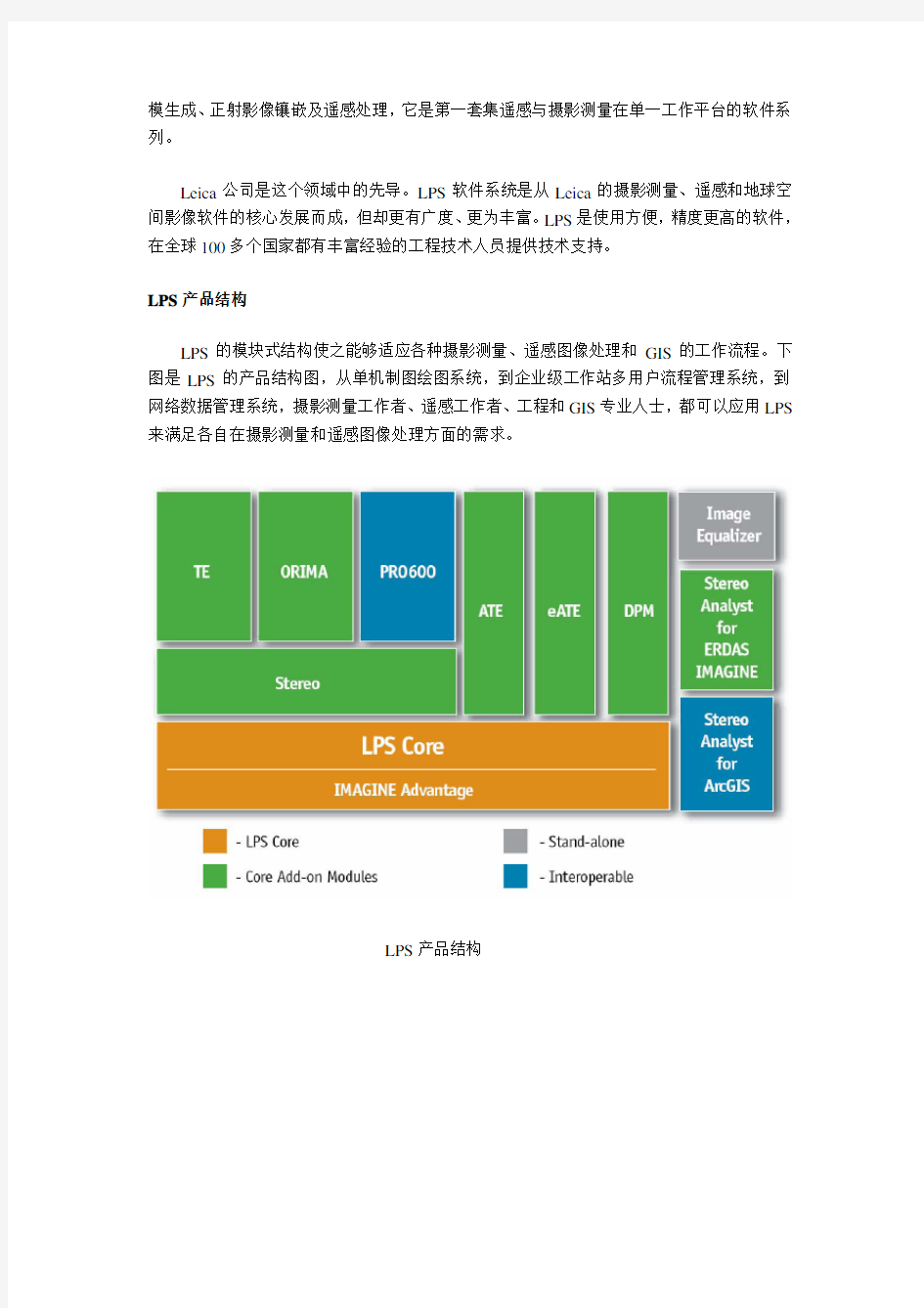
LPS的模块式结构使之能够适应各种摄影测量、遥感图像处理和GIS的工作流程。下图是LPS的产品结构图,从单机制图绘图系统,到企业级工作站多用户流程管理系统,到网络数据管理系统,摄影测量工作者、遥感工作者、工程和GIS专业人士,都可以应用LPS 来满足各自在摄影测量和遥感图像处理方面的需求。
LPS产品结构
LPS Core立体像对正射纠正数字摄影测量模块
LPS Core提供了功能强大且操作简单的数字摄影测量工具,为影像处理及数字摄影测量提供高精度及高效能的生产工具,对各种具有一定重叠度的卫星与航空影像进行区域网正射纠正(SPOT4/5、QuickBird、IKONOS等),并具有区域网平差的功能。其功能主要包括处理各种航天及航空的各类传感器影像定向及空三计算、正射影像纠正以及影像处理。LPS Core包含ERDAS IMAGINE Advantage遥感处理软件,能够完成包括卫片、航片在内的各种影像处理。LPS将数字摄影测量和遥感图像处理完全流程化管理,简单方便。
LPS工作主界面
像点量测界面
驱动最新的地图生产流程
随着大量的传感器增加,原始影像也在增加,加上快速的、最新的地理空间数据的需求,摄影测量专家在保证精度的前提下,必须在短期时间内生成数据产品。LPS Core提供了自动处理和分析的工具,形成批量生产摄影测量数据的处理工作流。利用LPS Core,制图专家可以在维持甚者提高数据产品精度的同时,达到最高的生产力标准。
摄影测量工程的入口
LPS Core提供了工作流向导式工程管理系统,可以访问摄影测量过程的所有阶段。LPS Core提供友好、易用的界面,带有参数设置和易用的可视化、报告和管理工具,满足专业的摄影测量专家、GIS人才和地理空间分析家的需求。
与ERDAS IMAGINE Advantage绑定
LPS Core包含IMAGINE Advantage模块的所有功能,允许用户在一个无缝的工作流中,用影像处理和遥感分析工具处理数据。IMAGINE Advantage支持150多种不同数据格式的地理空间数据。另外,用户可以利用IMAGINE扩展模块进一步提高生产工作流。
LPS Core包含ERDAS MosaicPro
可以利用MosaicPro对两幅甚至成百上千幅影像进行无缝的匀色拼接,ERDAS MosaicPro提供了简单的工作流,使用单一的工作界面,所有工具都集中在一个统一的工具条中。ERDAS MosaicPro改进了拼接线编辑界面,并可以立即显示编辑后的裁切效果。ERDAS MosaicPro带有丰富的匀色工具集、批处理、区域预览、直接写为压缩格式,满足生产地图工业的高生产力需求。
关键特征
z支持的模型包括框幅式相机,数码相机、摄影机、普通相机,TM、ETM、MSS、SPOT2/4 CEOS、SPOT5 DIMAP、ALOS、QuickBird、WorldView、IKNOS、FORMASAT、GeoEye、IRS-1C、ASTER、EROS A/B、THEOS、OrbView等
z流程化的处理方式,通过生产过程驱动流程
z具有专业级数字摄影测量软件和遥感图像处理软件的核心功能
z支持8bits和16bits数据深度以及无限制的波段数,可处理大于2GB的图像
z有功能强大的CellArray 表格数据并可以跟踪进程,通过不同的颜色告知用户操作的进展情况。方便的视窗管理功能,使用户可以利用其提供的预览、浏览、放大窗口,方便快速地选择控制点,连接点、或检查点,方便地进行校正图像及参考图像间的转换。
z LPS会自动确定出现在多个重叠影像上地面点相应的影像位置。并具有多种自动连接点
的寻找策略,可以提供高精度的连接点
z支持各类航空、卫星传感器模型的空三计算,区域范围内大量航片、卫片的快速正射纠正、拼接等基础图像处理
z支持SCBA(self-calibrating bundle adjustment)功能,用于纠正相机的内方位元素,并提供Bauer's simple model (3)、Jacobsen's simple model (4)、Ebner's orthogonal model (12)、Brown's physical model (14)、Lens distortion model (2)等5种减少系统误差模型的测量平差功能。
z支持海量数据管理,理论上可管理大到48TB的影像文件
z支持大量常用数据结构和格式文件,能够直接读取操作各种流行标准格式图像、栅格及矢量数据格式
z具备图象几何纠正的功能, 不但可以进行通用的多项式及局部调整校正,还应提供各种常用传感器的几何模型以便进行精确的正射校正
z支持图像不规则接边的镶嵌,自动进行颜色匹配、颜色平衡、颜色过渡;接边线的编辑、接边操作、镶嵌过程、显示等功能方便完善;
z误差报告和结果预览简便
LPS Automatic Terrain Extraction (ATE)
数字地面模型自动提取模块
LPS Automatic Terrain Extraction(ATE)是LPS的扩展模块,提供了从包含成百上千幅影像的项目区域中自动提取数字地面模型(DEM)的能力。通过LPS ATE,可以快速地创建中等密度的表面。利用向导式处理工作流,可以快速地建立DTM工程,然后自动进行提取,也可以通过高级的操作,例如地形过滤、裁切等等。内嵌的质量控制和精度报告工具保证输出的精度。
DTM提取界面
三维地形数据的自动收集
LPS Automatic Terrain Extraction通过自动提取三维地形数据提高生产力。大大降低了生产花费,仅仅要求对输出进行编辑,而不用在全手动编辑上耗时。多样的质量检查和精度报告工具保证了自动提取结果的详细追踪和质量控制。
嵌入地形处理工具
数据通过LPS Automatic Terrain Extraction,在地形点相关系数之后,可以进行自动的后处理。地形模型refinement选项允许过滤掉单个的点、光滑处理或在需要的特殊区域指定特殊的算法。
用LPS ATE提取的DEM和与之关联的等高线
关键特征
用LPS软件完全可以从两个或更多的影像中自动生成地面模型。
z这是一个面向生产的直线型的作业流程:
-定义总的DTM项目的特性、参数,包括地图投影和文档格式
-挑选有关的影像对
-界定DTM的范围
-界定无关的地区
-输入计算DTM精度的信息
-完成DTM自动提取
z自动析出、组合并镶嵌整个项目范围内的各个DTM图,最后一次点击便将几百个影像集成为一个整体图
z适用的关键参数间的互相作用及功能上的配合
z在影像上自动界定或由用户界定DTM作业范围
z支持航空相机、ADS40,数字化相机、摄像机、非公制相机以及卫星传感器(IRS-1C、SPOT、IKONOS)
z可以在输入的影像上规定截取百分比,以避免坐标点
z用户界面可以变换,以适应自初步入行的GIS专业人员到地图生产专家的各类要求
z含区域发展工具,可以自动引出蕴含或排除的地理区域,或者使用现存的ESRI Shapefiles、ARC SDE Vector Layers、Arc Coverage files或ERDAS AOIs
z可以编制DTM提取主要参数
-可以对主要参数作相应调整
-主要参数包括:
要研究的区域
相关规模
系数范围
地貌地形的类型
土地包含物体的类型
z内置质量保证、品质控制及精度报告手段
z含质量检测,以控制、检测和连接点位,文字文档或其地地模
z做出每个DTM的精度报告,内容包括统计精度信息,如RMSE, NIMA CE 90 及LE 90计算,主要误差,总误差,处理时间统计以及总的DTM提取统计输出
z有每个己提取的DTM的误差影像,标明地理区域并附有极佳、良好、尚可、较差及内插DTM的输出
z提取的DTM可以以多种格式输出:ERDAS Raster格式、3D Shapefiles、TerraModel TINs、SOCET SET Grids或TINs或者ASCII文档
z应用LPS Core模块中的3D Surfacing Tool,可以组合地模并支持MicroStation DGN文档和破折线
z可以批处理
LPS Terrain Editor(TE)数字地面模型编辑模块
LPS Terrain Editor是编辑DTM全面有力的工具,迅速更新地图。包括立体模式下的点、线和面地形编辑。地形编辑支持多种DTM格式,包括Leica Terrain Format、SOCET SET TINs、SOCET SET Grids、TerraModel TINs和Raster DEMs等。
在立体模式下的三维地形编辑
保证高质量数据产品的生产
地形模型的质量影响正射校正的几何精度,摄影测量工作流程至关重要的部分,就是质量控制和改进DTM,来提高整个摄影测量处理过程。
地形图的动态实时可视化
LPS Terrain Editor是一个动态的编辑工具,某个点一旦被修改,可以实时更新地形的显示。为了地形模型的可视化,LPS Terrain Editor可以显示地形图元,包括在在立体影像上叠加点、线、网格和等高线层,用于编辑和质量保证。其他的显示选项可以由用户设置。
全面的地形编辑能力
LPS Terrain Editor支持广泛的数字地形模型格式,包括多种GRID和TIN格式。这些地形数据可以用大量的编辑工具编辑,包括:点、断线和地貌线状的编辑等。
关键特征
z可显示与立体影像叠合的地面图,用作编辑及QA(速动)
z以点、线、TIN(网格)或轮廓线显示地面
z可同时显示一个以上的画面
z用户可以选择显示的色泽、线条粗细、尺寸和字体
z用点、线或区域选择等操作工具,可以对地模进行增加、删除或修改
z有平滑、削磨、使偏、设定、内插等区域平面修改工具
z用光标标高、区域界限、点入、点出在区域平面上设置标高
z可设置影像显示,包括固定影像、固定光标、连续漫游、反差和光亮度、立体、单向
z有如TopoMouse这样用作互动光标控制的移动工具,也可设置按钮的动作并作互动修正
z可以反复“复原”及“重做”
z有多种地面格式:
-TerraModel TIN
-SOCET SET TIN 或Grid
-ERDAS Raster
-输入格式有:
?USGS Spatial Data Transfer Standard (SDTS)
?NIMA Digital Terrain Elevation Data (DTED)
? ESRI Shapefiles
? ASCII text files
LPS ORIMA 空三加密模块
LPS ORIMA是一个区域网空中三角测量与分析的软件系统。是现代化的、易用的定向管理软件,能够处理大量的影像坐标、地面控制点和GPS坐标。ORIMA能够实现以生产为核心的框幅式和徕卡ADS40/ADS80影像的空中三角测量。
ORIMA图像用户界面
成熟可靠的技术
拥有ORIMA,精度不再成为问题。ORIMA利用高级的工具集,允许专业摄影测量专家在流程化的处理过程中尽可能地达到精确。功能包括在点测量的过程中多窗口显示,在立体或单景模式下连接点全自动量测(APM)和半自动的控制点量测。另外,ORIMA可以为补偿本地系统误差计算校正格网。
完全支持航空GPS IMU数据
ORIMA可以处理airborne GPS和Inertial Measurement Unit(IMU)姿态数据,包括GPS 偏移和IMU 误差参数。
与LPS完全整合
ORIMA支持LPS支持的所有坐标系统和基准面,在非笛卡尔(Cartesian)坐标系统中为三角测量提供了一个严密的数学解决方案,所有需要的坐标转换都可以在ORIMA中进行处理。
关键特征
z为框式和ADS40影像进行自检成组调整
z为大量的影像管理提供经济的数据整理
z点位量测时,可以显示多幅影像
z即使项目规模增大,量测速度不会减少
z对ADS40影像,有特殊的数学模型
z对ADS40和框式影像可以共同进三角网处理
z有高度自动化的统计进行错误检查和消除及防止误差的全面扩散
z全自动化点位量测和地面控制点转换
z半自动立体点位量测
z点位量测后,按序-按序校正可以令量测更方便,并且尽早发现误差
z有互动式的图形工具,如误差椭圆、矩形、射线贯通几何图形和影像区域辨别等,可进行成组分析,辨认和消除大错误或者虚弱的区域,用点-点击监视进行重测。
z图形可直接输出至打印机成绘图机
z可出全数字式报告
z严格评估结合GPS数据及IMU数据,不论是否有漂移参数和IMU不对中
z GPS和IMU数据的输入格式灵活,包括为Applanix POSPac软件直接转换格式z从地面至传感器,包括地图投影或地理坐标应用都严密换算
z有多种语言版本
z有不同功能的多个版本适合用户需求
LPS PRO600数字测图模块
LPS PRO600是交互式特征采集并在MicroStation GeoGraphics环境下进行编辑的性能完善的软件包。为用户提供了灵活、易学的以CAD为基础的,用于立体影像大比例尺数字成图的工具,包括标记、符号、颜色、线宽、用户自定义的线型和格式等。
PRO600工作界面
全面的工具集
PRO600为数字制图专家提供一个广泛的工具集,帮助他们增加生产效率,PRO600的采集和编辑工具为高精度的生产制图提供了完整的解决方案。自动备份和多种采集模式也提高了工作流程。
进行生产制图
利用PRO600中PROCART模块详尽的特征提取,为数字制图提供最高的精度。PRO600的PRODTM模块整合了地形处理功能,为广泛的制图需求提供一个完美的解决方案。
可靠的技术
由于PRO600的可靠性和质量性能的强大历史,它被世界范围内的制图专家证明是精湛的技术。
关键特征
z制作地图的工具如,线条类型、多边形阴影线、各种符号、等高线注释、斜坡地形、注记框位设置
z全面的特征编码功能:
-每种特征最多有8种码
-有加入/移动各种码的工具
-安装特征码选择设定
z在MicroStation视图及LPS 的立体影像视图上显示地图
-三维、MicroStation和立体影像视图之间,光标移动和地图显示所有视图同时双向驱动
-向MicroStation实时输入XYZ坐标
-与MicroStation的颜色设定自动调和
-将MicroStation的视图旋转到立体视图的kappa旋转
z有多种收集方法和工具,提高作业速度
-共有七种点与点方法:
?符号
?线条
?点串
?曲线
?弧线
?方形
?多边形
-用单色将上坡或下坡融合
-符合单击放显
-标出点位高,附注
z同时最多可生成20条平行线
-在另一细部再添平行线时,它们之间会有数字化的距离
-集合细部时,间距可调
-绘弧线,在尖窄的转角处接点可消除以及综合各细部
-在原有的细部可以添加平行线
z运用TopoMouse, Immersion mouse 或系统鼠标等输入工具成图
-有100种以上的按钮功能可选
-也可运用功能键完成更多的步骤
z定时性地自动呈现设计文档
z有复原和重做功能
z地面控制点功能可以以加注的符号绘出地控点
-驱入地控点
-阅读ORIMA, SOCET SET及全文字地控点文档z数据编辑,包括完成等高线,生成中心线
-移动或将文字数据转成符号
-方形和排列
-线条转细
LPS Stereo 立体观测模块
LPS Stereo以多种方式对影像进行三维立体观测。能够在立体模式下提取地理空间内容。进行子象元定位、连续漫游和缩放、快速图像显示。显示包括:立体、分窗、单片和三维显示等。
应用LPS立体观测模块可以以多种方式对影像作三维立体视测。它的立体显示可让使用者更有效地使用所推荐的图形卡。
LPS Stereo精确的立体观察界面
平滑、快速地显示立体影像
LPS Stereo为满足各种立体可视化的需要,提供了一套丰富的功能。功能包括:多个同时显示的立体窗口、连续和非连续的缩放工具、子象元光标定位和测量、各种各样的光标移动和显示选项。这些广泛的工具集和快速制图透视结合起来,使LPS Stereo直观易用。
多个影像的点立体量测界面
LPS Stereo从多种方式重叠的影像上收集和编辑同名点、控制点和检查点,是非常高效
的。为影像的显示和测量可以建立多个单景和立体窗口,这些窗口中的影像基于传感器模型可以被关联缩放、旋转和漫游,以达到最佳的跟踪。也可以从立体环境中快速提取控制点并转换这个点为精度不高的单景资源。
包含影像增强工具
完善三维可视化功能,LPS Stereo包含影像增强工具,包括亮度调整、对比度调整和动态的距离调整等。
关键特征
z移动游标/固定影像以及固定游标/移动影像
z左移动影像模式时,可以顺利、周密地漫游
z主动和被动的三维观视模式
z单屏幕或双屏幕呈显
z可将影像引入或脱离观视镜
z快速呈图
z需要时可进行在机表射偏振校正,令测视更舒适
z从地模或影像区配中,游标会自动进行Z方向放置
z可同时进行几个立体视测
z可进行单像、立体、左和右或三向(单像和左、右)观视
z每个影像上都出现游标
z连续远、近调焦,和独立分档如1:1,2:1
z在机重复取样,以进行次像素游标定位和量测
z进行影像修整,包括旋位,明暗度和反差
z当有几个处理器时,可进行分头处理
ERDAS Imagine Equalizer影像匀光器
Imagine Equalizer是LPS修正和增强影像质量的非常有用的工具。可以对影像进行匀光处理;均衡和完善单幅或多幅影像的色调;除去局部两点(Hot-spots),晕映和变形;交互式或批处理工作方式。
ERDAS Imagine Equalizer的辐射校正
创建均衡的辐射校正影像
ERDAS Imagine Equalizer用高级的算法进行辐射调整,提供去除热点、斑点、产生均匀辐射校正结果的工具。
校正结果动态预览
ERDAS Imagine Equalizer的预览能力提供给用户在没有真正运行调整的情况下,立即查看应用算法参数的效果,这使用户在处理影像数据之前确保结果的质量。
关键特征
z均衡和完善单幅或多幅影像
z去除局部过热点、晕映和变形
z可以互动
LPS eATE分布式、并行自动地形提取模块
LPS eATE是从立体像对中生成高分辨率地形信息的新模块。LPS eATE为地形数据的处理提供了并行计算的环境。这种高通用性的解决方案适合于不同项目,从卫星到航空框式和数字推扫式(pushbroom)传感器技术,可输出不同密度的地形,一直到像素级水平。对于合法用户,LPS eATE的预览提供了提前查看新的ERDAS地形处理解决方案。这种方案目前计划在2010年初发布。
LPS eATE算法和工具选择界面
前所未有的高密度地形数据
随着现代航空和卫星传感器日益增加的数据分辨率,LPS eATE利用这个特征,生产高密度的结果。地形处理选项的灵活性可以完全控制结果。
利用现代计算机环境
LPS eATE利用了多核计算机系统的能力,也支持计算机网络组的并行处理,这为或大或小的地形生产工作提供了可伸缩的解决方案。
Barone中文操作手册
1.2运行程序 执行【开始】?【所有程序】?【Zebra BAR-ONE v5.0】?单击【Design Program】即可运行程 序,程序初始运行接口如下: 2 2.1菜单及按钮说明 软件运行后如下图所示: 菜单在最上面自左向右为:如下图 【File】-文件, 【Edit】-编辑, 【Veiw】-视图, 【Label】-标签, 【Options】-选项, 【ODBC】-数据库联接, 【Report】-报表, 【Window】-窗口, 【Help】-帮助 按钮在第二行从左向右依次为: 【新建文档】, 【打开文档】, 【保存文档】, 【剪切】, 【复制】, 【粘贴】, 【撤消】, 【重复】, 【指针】, 【条码】, 【线条】, 【圆】, 【字符】, 【变量】, 【图形】, 【测试打印】, 【打印】, 【放大】, 【缩小】, 【帮助】 2.2选择打印机??? 单击【File】?【Printer setup】?【Main printer】弹出如下图所示 ?在【Printer Type】选项选择Z105S/105SE-300dpi ?在【Port】选择COM1: 其它使用默认值. ?单击【OK】完成设定. 2.3新建标签文档 单击【File】?【New】即可。 2.4设置标签文档 ??单击【File】?【Label setup】,或单击【Label】?【Setup】出现对话框, 如下图所示: 【Label dimensions】中设定标签的宽度和高度, 【Width, Depth】, 【Margins】中设定上边距和左边距【Left, Top】, 【Units】中设定度量单位【mm】-毫米, 【inches】英寸,
产品需求规格书模板
XX项目 产品需求规格说明书模板
目录 1文档介绍 (2) 1.1文档目的 (2) 1.2文档范围 (2) 1.3读者对象 (2) 1.4参考文档 (3) 1.5术语与缩写解释 (3) 2综合描述 (3) 2.1产品介绍 (3) 2.2产品面向的用户群体(可选) (3) 2.3产品应当遵循的标准或规范 (4) 2.4产品范围 (4) 2.5产品涉众(涉及角色) (4) 2.6设计和实现的限制 (4) 2.7假设和约束(依赖) (5) 3产品需求 (5) 3.1需求分类 (5) 3.2用例图 (6) 3.3功能需求 (7) 3.3.1需求描述 (7) 3.3.2特殊需求 (8) 3.3.3数据规范 (8) 3.4非功能需求(包括但不限制于以下几项) (8) 3.4.1时间特性要求 (8) 3.4.2精度要求 (9) 3.4.3业务量估算 (9) 3.4.4灵活性 (9) 3.4.5可用性 (9) 3.4.6安全性 (10) 3.4.7兼容性 (10) 3.4.8易用性 (11) 3.4.9可维护性 (11) 3.5运行环境 (11) 3.5.1设备及分布 (11) 3.5.2支撑软件 (12) 3.6接口 (12) 3.6.1硬件接口 (12) 3.6.2软件接口 (12) 3.6.3通讯接口 (12) 3.6.4用户接口 (13) 4验收标准 (14) 4.1功能验收标准 (14) 4.2非功能性验收标准 (14) 附录A:需求建模与分析报告 (14) A.1需求模型1 (15) A.2需求模型N (15) 附录B:需求确认 (15)
【对本文档的说明: 本文档中黑色斜字体为说明性文字,黑色正常字体为需求规格说明书实际写作时必需部分。蓝色字体为举例说明文字。】 1文档介绍 1.1 文档目的 提示: 软件需求规格说明主要描述系统的概貌、功能要求、性能分析、运行要求和将来可能提出的要求。阐述一个软件系统必须提供的功能和性能以及它所要考虑的限制条件,它应该尽可能完整地描述系统预期的外部行为和用户可视化行为。 举例说明: 示例:本文档的主要目的是描述XXX项目中XXX模块的功能需求和非功能需求,功能需求采用用例的方式描述。以使所有涉众能够达成共识。本需求说明书,在需求固化之前,会有相应的变更。在文档历史中会详细记录变更的具体内容。 1.2 文档范围 提示: 文档范围包括:产品介绍,产品面向的用户群体,产品应当遵守的标准与规范,产品范围,产品中的角色,产品的功能性需求,产品的非功能性需求。 1.3 读者对象 提示: 1)各种管理人员及开发人员:专案经理、系统工程师、软件开发人员、硬件开发人员、测试人员、型态管理人员、品质保证人员、作业员和技术出版人员。 2)软件使用客户。
AGV中文的操作手册仅供参考
AGV 操作手册(仅供参考)
1.AGV基本介绍 (1) 1.1AGV外观结构和系统构成 (1) 1.2AGV人机界面介绍 (3) 1.2.1车体主面板 (3) 1.2.2行走手控盒 (5) 1.2.3举升操作面板 (6) 1.2.4指示灯的功能 (7) 2.AGV基本操作 (7) 2.1AGV车体主面板操作方法 (7) 2.1.1 面板显示 (7) 2.1.2 设备状态菜单选择 (8) 2.1.3 参数设置 (17) 2.1.4 特殊操作 (20) 2.2AGV行走手控盒操作方法 (25) 2.2.1 行走操作 (25) 2.2.2 速度设置 (26) 2.2.3自动对线 (28) 2.3AGV举升面板操作方法 (28) 9.AGV运行方法 (29) 3.1AGV开机通电操作 (29) 3.2AGV关机断电操作 (29) 3.3AGV运行方式选择 (30) 3.3.1 在线运行方式 (30) 3.3.2 离线运行方式 (31) 3.3.3 手动运行方式 (32) 3.4AGV退出系统操作 (33) 3.4.1 AGV从运行任务中的退出 (33) 3.4.2 AGV安全退出控制台系统 (34) 3.5AGV暂停方式 (34) 3.5.1 AGV安全暂停 (34) 3.5.2 AGV碰撞停车 (36) 3.6AGV动态装配流程 (36) 4系统工具及参数设置 (37) 4.1系统工具 (37) 4.1.1 I/O调试 (38) 4.1.2 Ping操作 (39) 4.1.3 IP设置 (40)
4.2系统参数设置 (40) 4.2.1 导航系统参数 (41) 4.2.2 车体轮系结构参数 (41) 4.2.3 系统管理参数 (43) 4.2.4 扩展设备参数 (44) 4.2.5 选择界面语言 (44)
FMU90中文操作手册
Prosonic S FMU9X 中文操作手册 与FDU91/91F/92/93/95/96系列超声波探头配套使用,完成物位/流量等参数测量
物位测量中的应用: 配备一个或两个超声波探头可对液体、糊状物、泥块、粉尘及表面粗糙的块状物料进行连续非接触式物位测量。 量程范围≦70m(根据不同的型号和使用场合决定测量范围); 采用两个探头可完成差值、平均值以及总和的测量与计算。 流量测量中的应用: 配备一个或两个超声波探头可对明渠和测量堰中的介质进行流量测量。优点: 六行纯文本液晶显示,简单的菜单引导式操作; 自动识别FDU91/91F/92/93/95/96系列超声波探头,并且可与FDU8X系列探头配套使用; 包络线显示可用于快速、简单的仪表故障判断; 提供ToF-Tool-FieldTool Package 操作软件可使用户方便的对仪表进行操作、诊断和参数设定; 内部预置常用的明渠/堰的流量测量线性化数据表,用户可根据情况自由选择,并根据线性化数据表计算流量; 一、测量原理: BD:盲区;D:探头振膜表面到物料表面的距离;E:测量零点(0% ,空罐);F:最高物位(100% ,满罐);L:物位高度;V:物料的体积(或质量) 探头向物料表面发射超声波脉冲信号。物料表面反射回波,这部分回波又被探头所接收。变送器计算探头发射和接收超声波脉冲信号的时间差t,由时间t和声速c可计算出探头振膜表面和物料表面的距离。 D=C * t/2 通过计算出的D值可计算出理想状态下的物位L,体积V等。
1、盲区:物料的最高物位F不能进入盲区BD,传感器的特性决定了盲区内的回波信号将无法被接收到。盲区的大小与所采用的探头型号有关。 2、干扰回波抑制:Prosonic S 具有干扰回波抑制功能,以确保干扰回波(如边缘,焊接点和安装过程造成的干扰)不会被误认为是实际的物位表面的反射回波信号。 3、物位测量的应用实例: 4、通过HART的通讯连接:
SPD385-40A-MH产品规格书-V3.3
审核: Reviewed by 陈伟东 日期: Date 2011-06-29 批准: Granted by 李叶来 日期: Date 2011-06-29 深圳市海鹏信电子股份有限公司 SHENZHEN HAIPENGXIN ELECTRONICS CO.,LTD. 版权所有 侵权必究 All rights reserved
2009-02-01 未经许可不得扩散 第2页,共8页Page 2 , Total8 修订记录 日期 修订版本 描述 编写 2009-02-01 V1.0 初版制订 韦耀峰 2010-08-12 V1.1 技术参数更新,添加认证 李韵晴 2010-12-10 V3.0 产品说明书版本同步 李韵晴 2011-06-29 V3.2 海拔高度和安规版本更改 曾维霞 2012-01-09 V3.3 尺寸图加标公差、更改大气压力 曾维霞
2009-02-01 未经许可不得扩散 第3页,共8页Page 3 , Total8 目 录 1 适用范围..........................................................................................................................5 2 规范性引用文件...............................................................................................................5 3 功能性能..........................................................................................................................5 3.1 简述.................................................................................................................................5 3.2 性能指标..........................................................................................................................5 4 防护原理(仅供参考).....................................................................................................6 5 结构和外观.......................................................................................................................6 5.1 端口类型..........................................................................................................................6 5.2 结构.................................................................................................................................6 5.2.1 结构尺寸....................................................................................................................6 5.2.2 附件............................................................................................................................7 5.2.3 安装............................................................................................................................7 6 适用环境与安规...............................................................................................................7 7 环保.................................................................................................................................8 8 产品标签..........................................................................................................................8 9 产品照片.. (8)
操作手册中文样本
■ 安全注意事项 警告表示的定义 警告表示 CPM1A-AD041 操作手册 感谢您购买OMRON 的产品. 为了 确保安全使用, 请您务必在使用 之前先阅读本操作手册. 请妥善 保管本手册, 确保产品的最终用 户在需要的时候能够阅读 在任何情况下, 请勿触到 在通电状态下请勿触到端 警告 注意 表示如使用错误, 警告 在通电的状态下拆开单元 警告 表示如使用错 注意
CPM1A-AD041是模拟量输入单元. CPM2AH 最多能够连接3个扩展单元, 包括扩展I/O单元, CPM1A-AD041以及CPM1A-DA041(模拟量输出单元). CPM1A-AD041包含4路模拟量输入, 在CPM2AH全部接模拟量输入单元的情况下, 系统最多可提供12路模拟量输入. 最多能够连接3个扩展单元, 包括扩展I/O单元 4路模拟量输入 注: 1、CPM1A/CPM2A最多只能够连1台CPM1A-AD041和1台 CPM1A-20EDT (或1台CPM1A-20EDR).
■模拟量输入信号范围 模拟量输入单元将输入的模拟量转换为数字量。数字量的输出范围如下图所示。 -10~10 V -10~10V的电压输入对应于十六进制数F448~ 0BB8(-3000~3000)。完整的数据输出范围是F31C~ 0CE4(-3300~3300)。使用补码来表示负电压。 0~10 V 0~10 V的电压输入对应于十六进制数0000~ 1770(0000~6000)。
完整的数据输出范围是FED4~ 189C(-300~6300)。使用补码来表示负电压。 0~5V 0~5V的电压输入对应于十六进制数0000~1770(0000~6000)。完整的数据输出范围是FED4~ 189C(-300~6300)。使用补码来表示负电压。
CS3000操作中文手册
CS3000中文操作手册
CS3000系统简介 1.概述 日本横河公司的CENTUM CS3000 DCS系统。装置内所有仪表及安全监测信号全部进入DCS 系统。CS3000操作平台类似于Windows操作平台,它包括系统控制站和若干人机界面站,以鼠标及键盘操作为主。 2.特点 2.1 监控点可以由多个HIS(Human Interface Station)同时操作,每个HIS也可以同时操作多个监控点(可以是不同岗位的多个监控点)。 2.2 CS3000系统的处理能力非常强大,它可以处理100,000tags(工位号)、2,500幅画面(包括各种监控画面),每幅画面上可显示多达400个数据。 2.3 人机界面比较好。选用Windows NT作为操作系统,采用X—Windows(多画面)技术,类似一般的PC机。可根据工艺的要求,实现各种友好的控制监测画面。比如它可以用棒图动态显示液/界位的变化;采用颜色、闪烁、声音等手段提醒操作人员发生过程报警及高低级别;单点操作采用Faceplate(面板)类似于常规仪表的柱状液晶显示,监视及操作较直
观。 2.4 CS3000系统具有强大的数据处理能力,足以完成一般生产所需的数据运算、统计要求,并能对生产数据实时打印输出。 2.5 正常生产中可按需求在线修改组态,更好地服务于生产。 二、操作说明 1.名词解释: 1.1过程报警(Process Alarm):过程报警该钮显亮,点击出现报警信息的窗口。 1.2系统报警(System Alarm):系统报警时,该钮闪亮,点击弹出系统报警信息窗口。 1.3操作员指导信息(Operator Guide Message):有操作员指导信息时,该钮闪亮,点击弹出指导信息窗口。 1.4 登录信息(User In Monitor):设置用户身份。 1.5 窗口调用菜单(Window Call Menu):调用各种画面。 1.6 操作菜单(Operation Menu):相关流程图切换按钮。 1.7 预设窗口菜单(Preset Window Menu):调用预先设置的画面。
X光机操作手册(中文)
X射线安检设备 操作手册 广州市克金安防科技有限公司 2010年版
目录 一、前言 二、系统概述 三、设备安装 四、系统操作 五、保养维护
一、前言 克金X射线安全检查设备是目前全球科技领先的X射线成像系统。该设备综合了高低能阵列探测器、数字化图像处理技术和计算机即时图像显示技术等诸多优点,为用户提供高效可靠和具有服务功能的高质量图像。 为了使广大用户对本设备有全面的了解,同时也更方便的使用该设备,特编写了此用户手册。 本手册全面地介绍了克金X射线安全检查设备的工作原理以及如何调整维护、维护和保养。在使用X射线安全检查设备前,请仔细阅读本手册。对于用户不遵守安全规范而损坏了设备,本公司不承担任何责任。 本设备应由接受过正规培训的人员操作。为避免射线的危害,操作人员必须始终严格遵守射线防护规则。 广州市克金安防科技有限公司拥有本手册的版权。未经本公司或其授权代理的书面许可,不得以任何形式的手段复制本手册。 由于时间精力有限,该手册难免有疏漏和不足之处,敬请广大用户、专家给予批评指正。 二、系统概述 1. 工作原理 设备是借助于输送带将被检查行李送入X射线检查通道而完成检查的。行李进入X射线检查通道,将阻挡包裹检测传感器,检测信号被送往系统控制部分,产生X射线触发信号,触发X射线射线源发射X射线束。一束经过准直器的扇形X射线束穿过输送带上的被检物品,X射线被被检物品吸收,最后轰击安装在通道内的双能量半导体探测器。探测器把X射线转变为信号,这些很弱的信号被放大,并送到信号处理机箱做进一步处理。 2. 技术指标 一般指标 通道尺寸:500*300 650*500 800*650 1000*800 1000*1000 传送带速度:0.2m/s 传送带最大负荷:200kg 分辨力:直径0.10mm金属线 穿透力:>30mm 胶卷安全性:对ISO1600胶卷安全
ZSC31150操作手册中文手册
ZSC31150操作手册 目录 ZSC31150操作手册 (1) 1 Control Logic 控制逻辑 (3) 1.1 General Description (3) 1.2 CMC Description (3) 2 Signal Conditioning 信号调理 (6) 2.1 AD Conversion 模数转换 (6) 2.2 AD Conversion Result Segmentation AD转换结果分割 (7) 2.3 Signal Conditioning Formula 信号调理公式 (8) 2.4 Analog and Digital Output 模拟和数字输出 (9) 2.5 Digital Filter Function 数字滤波功能 (9) 2.6 Output Signal Range and Limitation 输出信号范围和极限 (9) 3 Serial Digital Interface 串行数字接口 (11) 3.1 General Description (11) 3.2 I2C Protocol I2C通信协议 (12) 4 Interface Commands 接口命令 (16) 4.1 Command Set (16) 4.2 Command Processing (19) 4.3 SIF Output Register (19) 4.4 Command Response Codes (20) 4.5 Detailed Description for Specific Commands (20) 5 EEPROM and RAM (24) 5.1 Programming the EEPROM (24) 5.2 EEPROM and RAM Contect(内容) (24) 5.3 EEPROM Signature(签名) (30) 5.4 EEPROM Write Locking (30)
技术规格书
技术规格书 项目名称:轨顶摩擦控制装置采购 《技术规格书》中标注有“★”号的条款必须实质性响应,不允许负偏离(不满足要求)。 ★一、技术参数 轨顶摩擦控制装置包含以下几个主要组成部分:车轮探测单元(车轮传感器)、控制单元(控制箱)、分配泵和电机、摩擦调节剂储存单元(储液箱)、摩擦调节剂涂覆组件(输液管/涂覆板)。 1、摩擦调节剂储存单元(储液箱):独立的调节剂和电气隔箱,配有单独的可锁盖设计和一体式斜面板设计。防水密封盖,配有可调节下拉锁扣。箱体尺寸(长宽高):(860~870) mm *(450~460)mm *(680~690)mm 2、电气箱:符合NEMA12标准的固态控制板。 泵周期调整范围:0.05s——1.95s 泵轴数调整范围:1轴——256轴 熔断保护器:20A 3、车轮探测单元(车轮传感器):非接触式敏感车轮传感器(SMS),钢轨安装支架和J型螺栓。支架尺寸(长宽高):(1365~1375)mm *(510~530)mm *(805~810)mm。支架材质:碳钢喷漆。J型螺栓尺寸(英制):10-1/2,3/4,镀锌。 4、摩擦调节剂涂覆组件(输液管/涂覆板):每台设备含有2个涂敷板,涂敷板上均有内置分配器,以保证均匀喷涂到钢轨。涂覆板尺寸(长宽高):(912~916)mm *(62~66)mm *(24~26)mm 涂覆板材质:合金钢。内置分配器材质:不锈钢、铜。 5、必备条件: A 噪音控制距离300米以上,波磨控制距离800米以上。 B 轨顶涂覆,对横向力、波磨、噪音、轨顶剥离掉块、压溃控制效果明显。其中横向力平均降低值27%或以上,噪音降低25%或以上。 C 调节剂是非油或者脂类产品,不含挥发性溶剂,必须是水基固化干性薄膜产品。 此产品是一水基态摩擦调节剂,包含由无机固体,聚合物,以及其他添加剂组成的工程
PIT-W2009中文操作手册(最新)精简版
PIT-W2009 简明操作指南 责任编辑:李侠徐晓林
1 软件介绍 低应变方法不仅可以分析单速度曲线,而且可分析力和速度双曲线。采用声波脉冲响应测试数据(或称为瞬时响应测试),PIT-W 2009软件可进行时域分析、频域分析、双速度分析以及侧剖面分析。 1.1软件组成及版本 PIT-W有两个版本:标准版和专业版。频域分析、侧剖面分析、双速度分析和多信号图形输出功能只出现在专业版中。本手册涵盖了两个版本的全部功能。 1.2安装及启动 安装PIT-W软件首先运行安装CD盘上的“setup.exe”,然后安装程序自解压。安装完毕后,可以通过点击开始-程序-PDI-PIT-W 2009启动软件。软件以标准版形式出现;如需使用专业版程序,需要将该密钥插入计算机USB上,方能运行程序。 2 数据输入 2.1从PIT测试仪主机输入数据 2.1.1读取PIT测试仪主机文件(*.pte) 首先点击菜单Data,选择Import PIT Collector Files(*.pte),然后点击Individual Pile Files 或Project Folder。这时就会出现一个文件夹浏览对话框或文件对话框,选择正确的位置及路径(如硬盘、PCMCIA卡或U盘等)。如果点击Individual Pile Files选项,就直接选择*.pte文件。如果点击Project Folder选项,就选择一个文件夹,程序会把该文件夹内所有的*.pte文件读入。
2.2由文件输入数据 2.2.2 PIT-W文件—扩展名为“.pit” 在File菜单中点击Open或Save来打开或保存标准PIT-W文件;或者直接双击“.pit”格式文件。 3 一般操作 PIT-W软件主输入屏幕包含四个子窗口: a-Project/Pile Management Window 工程/桩管理窗口 b-Record Selection Window记录选择窗口 c-Input Parameter Window参数输入窗口 d-Graph Window 图形窗口
GENESYS中文操作手册
射頻與微波設計軟體操作範例手冊
GENESYS 操作範例六:Tuning 分析2 目錄 GENESYS 環境介紹 GENESYS 操作範例一:DC 模擬分析GENESYS 操作範例二:Transient 模擬分析GENESYS 操作範例三:S 參數模擬分析GENESYS 操作範例四:HB 模擬分析GENESYS 操作範例五:Impedance Match GENESYS 操作範例七:Sweep 分析GENESYS 操作範例八:Synthesize a Filter 34681012141618
3 Schematic 在這裡設計電路,按兩下電路中的元件,可以設定元件的參數。 Workspace Tree 建立新的電路圖、分析電路,和分析結果繪圖等。 Errors Window 如果執行電路模擬時發生錯誤,這裡會顯示錯誤的類型和發生的位置。 Library 搜尋GENESYS 提供的設計範例,和元件模型。 GENESYS 環境介紹
4 GENESYS 操作範例一:DC 模擬分析 1.首先開啟一個空白檔案File → new → 按OK 。 2.將游標移至左下Workspace Tree 打開 schematic 。 3. 在空白schematic 建立電路範例: 使用滑鼠按兩下元件,可輸入該元件的參數;連接各元件時,節點由粉紅轉為黑 色時,即表示連接成功 (File →Open My Workspaces →開啟DC.wsx 裡面為已建立好的範例)。
5 GENESYS 操作範例一:DC 模擬分析(續) 6. 最後一步,回到Schematic 。 按電路中的任一元件,即可 出現該元件各節點的電壓值。 4.在Workspace Tree 的Designs 上按滑鼠右鍵,Add →Analyses →Add DC Analysis ,OK 確定, Workspace Tree 出現DC 模擬分析的數據。 5.在Workspace Tree 的Designs 上按滑鼠右鍵,Add →Graphs →Add DC Rectangular Graph 出現 數據圖,按OK 確定。按元件 壓降分布
libreplan中文操作手册
libreplan中文操作手册 libreplan中文操作说明书 目录 本文分为三个主要部分: 首先,软件的木渎 第二,基本使用LibrePlan理解最低概念。 最后,完整流程描述创建订单、项目、项目计划、资源分配、推进任务,提取结果。 内容 可用性规范 LibrePlan 项目计划是一个开源的web应用程序。它的主要目标是为公司项目管理提供一个完整的解决方案。 公司概述
可以看到程序的主界面,用户可以看到的列表计划项目,了解公司的整体情况与订单和资源的使用。公司概述包含三个观点: 计划视图:视图,它结合了两种观点: o 查看订单和时间:每个项目使用甘特图,表明项目的开始和结束日期。这些信息结合图表显示之间的约定期限,然后比较了一定比例的进度和时间。 可以明确的看到每个项目最初设置的限定时间。其为程序的打开页面。 o 图显示公司的利用资源:资源分配图,搜索信息项目,也给出了总结整个公司使用的资源:绿色表示资源配置低于100%,资源的黑线显示可用的负 载和黄色表明资源分配是在100%以上。在同一时间有可能分配不到可用的资源和具体分配资源。 资源加载视图:屏幕显示公司员工的名单,具体分配任务的负载或通用分配的资源满足要求的列表。看到下面的图片。你需要点击整体加载的资源访问这个观点。 ? 订单管理视图。屏幕上显示的公司订单列表,用户可以执行以下操作:搜索,编辑,删除,计划或创建一个新的订单。你需要点击订单列表访问这个页面。 资源概述 工作分解结构
视图管理评论之前公司概述非常类似于单个项目的管理计划。一个项目可以访问以下几个方面: par通过订单的甘特图上单击右键,然后选择计划。通过访问订单列表,点击图标的甘特图。 通过创建一个新的订单计划,或改变当前的订单计划。 订单的程序有以下观点: 计划视图。视图中,用户可以假设的任务规划、相互关系、进程,等等查看规划细节以获取更多信息。 资源加载视图。视图中,用户可以查看指定资源加载项目。颜色代码是相同的公司概述:绿色负载低于100%,黄色为负载100%和红负载超过100%。负载可能来自一个任务或一组分配(通用分配)。 编辑视图。视图中,用户可以改变订单的细节。看到订单细节以获取更多信息。 优先项目配置视图。视图中,用户可以分配项目的高级选项:选择每天的时间或函数来进行分配。看资源分配细节以获取更多信息。 LibrePlan是一个应用程序,该应用程序已经开发成一个通用的规划工具。它是基于一系列概念分析发现的问题,目前在工业项目计划上尚没有规划工具能够完全满足功能需求。 用于这个项目的基本概念如下: 公司和多项目概述:LibrePlan是一个程序,专门为正在进行公司项目开发的用户提供项目信息,且是一个多项目计划。其功能不仅仅是针对某一个项目,当然,对于单个项目也有几个特
操作手册参考资料-中英文
操作手册参考资料 一、安全规范 一般的安全规则 1. 认识你的机器 为了你的个人安全, 仔细阅读本手册。熟知机器的应用与限制,以及与机器相关的潜在性危险。 2.保持工作区域干净. 杂乱的区域以及工作台会引起意外。 3.勿在危险的环境使用 勿在潮湿或下雨的地点使用,或将其暴露在雨中。保持工作区域良好的照明。4.非专业人员勿靠近 所有参观者在工作区域内必须保持安全的距离。 5.勿强行操作机器 让机器以其设计之速度下安全的执行工作。 6.使用正确的工具勿强行使机器或附加装置执行工作 7.穿著适当的衣服 避免佩带可能被移动部分卷入的宽松衣物、手套、项链、手镯或首饰。建议穿著防滑鞋。戴上包住长头发之发帽。 8.勿在工作状态保养机器 机器应进行适当之保养,如润滑、调整 10.维修、更换配件之前,或是组装和重新组装马达时,必须从电源处切断机器的电源. 11.使用建议之配件,查阅手册上建议之配件。 12.不要让机器在无人看管下运转。 本机器自身安全规则(此项由贵厂根据自己机器特点编写)
(英文版) 1.1 SAFETY RULES 1.1.1.GENERAL SAFETY RULES thoroughly and understand completely all instructions, rules, etc. contained in this manual. Failure to comply can result in accidents involving fire, electric shock, or serious personal injury. Keep owners manual and review frequently for continuous safe operation. 1.KNOW YOUR MACHINE. For your own safety, read the owner’s manual carefully. Learn its application and limitations as well as specific potential hazards pertinent to this machine. 2.KEEP WORK AREA CLEAN. Disorder area and working table will cause accident. 3.DO NOT USE IN DANGEROUS ENVIRONMENTS. Do not use power tools in damp or wet locations, or expose them to rain. Keeps work area well illuminated. 4.KEEP NON-PROFESSIONAL PEOPLE A WAY. All visitors should be kept at a safe distance from work area. 5.DO NOT FORCE THE MACHINE. It will do the job better and be safer at the rate for which it was designed. https://www.360docs.net/doc/0113723092.html,E THE RIGHT TOOLS. Do not force the machine or attachments to do a job for which they were not designed. 7.WEAR PROPER APPAREL. A void loose clothing, gloves ,neckties, rings, bracelets, or jewelry, which could be caught in moving parts. Non-slip footwear is recommended. Wear protective hair covering to contain long hair. 8.DON’T MAINTENANCE THE MACHINE IN RUNNING STA TES The machine should be maintained such as lubrication, proper adjustment. 9. BEFORE MAINTENANCE, ACCESSORY CHANGING OR ASSEMBLING AND REASSEMBLE MOTOR, BE SURE TO CUT OFF THE POWER FROM THE POWER RESOURCE. https://www.360docs.net/doc/0113723092.html,E RECOMMENDED ACCESSORIES. Consult the o wner’s manual for recommended accessories. 11.NEVER LEA VE MACHINE RUNNING UNA TTACHED. 1.1.2 ADDITIONAL SAFETY RULES FOR COLD FORMING MACHINE
系统需求规格书模板
XXXXXX 需求分析规格书 XXX小组(SMU) 2011-3-8 [在此处键入文档的摘要。摘要通常是对文档内容的简短总结。在此处键入文档的摘要。摘要通常是对文档内容的简短总结。]
0 文档介绍 (备注:本模板所有的举例只是为了说明需要描述的问题,提供参考,并不准确,切勿直接拷贝) 0.1目的 描述实际业务目的,对项目进行简要定义。如: 本文档的目的是系统地阐述XXXXXX,作为后续概要设计、详细设计、开发和测试的依据。 0.2文档范围 简要阐述本文档的所包含的内容范围,如: 并说明与此文档相关的其它必要说明,如: 本文档需参照附录一数据字典、附录二算法与公式。 0.3预期读者对象 列举所针对的不同读者角色和阅读建议。如: 本文档主要的阅读对象是产品的后续概要设计、详细设计、测试人员、维护人员和项目经理。其中概要设计人员、测试人员、项目经理应重点阅读本文档各部分,其他人员可选择性阅读本文档。 本文档的阅读对象包括: ?概要设计人员:根据需求进行体系结构设计,合理规划系统模块的划 分以及模块间关系,并且在概要设计中回溯需求。 ?详细设计人员:根据概要设计和需求进行产品的详细设计,描述各模 块的具体实现机制。
?测试人员:根据需求编写测试规格书和测试用例,建立测试与需求的 回溯关系,测试和验证产品。 ?维护人员:根据需求编写维护手册和用户手册。 ?项目经理:结合整个项目的研发目标,全局把握需求内容的合理性、 以及需求实现的可行性。 0.4术语与缩写解释 建议按字典序排列,后续描述统一用缩写,不再用全称或中文。 缩写、术语解释 表1 术语表 0.5参考文档 列出本文档的所有参考文献(可以是非正式出版物),格式如下: 〖标识符〗作者,文献名称,出版单位(或归属单位),日期。如: 1 系统概述 1.1产品描述 1.1.1 开发意图 描述该产品(软件或硬件)开发的意图及目标,如: ?
X光机操作手册(中文)
X 射线安检设备 操作手册 广州市克金安防科技有限公司 2010 年版
、八一、冃U 言 二、系统概述 三、设备安装 四、系统操作 五、保养维护
、八 、前言 克金X 射线安全检查设备是目前全球科技领先的X 射线成像系统。该设备综合了高低能阵列探测器、数字化图像处理技术和计算机即时图像显示技术等诸多优点,为用户提供高效可靠和具有服务功能的高质量图像。 为了使广大用户对本设备有全面的了解,同时也更方便的使用该设备,特编写了此用户手册。 本手册全面地介绍了克金X 射线安全检查设备的工作原理以及如何调整维护、维护和保养。在使用X 射线安全检查设备前,请仔细阅读本手册。对于用户不遵守安全规范而损坏了设备,本公司不承担任何责任。 本设备应由接受过正规培训的人员操作。为避免射线的危害,操作人员必须始终严格遵守射线防护规则。 广州市克金安防科技有限公司拥有本手册的版权。未经本公司或其授权代理的书面许可,不得以任何形式的手段复制本手册。 由于时间精力有限,该手册难免有疏漏和不足之处,敬请广大用户、专家给予批评指正。 二、系统概述 1. 工作原理 设备是借助于输送带将被检查行李送入X 射线检查通道而完成检查的。行李进入X 射线检查通道,将阻挡包裹检测传感器,检测信号被送往系统控制部分,产生X 射线触发信号,触发X 射线射线源发射X 射线束。一束经过准直器的扇形X 射线束穿过输送带上的被检物品,X 射线被被检物品吸收,最后轰击安装在通道内的双能量半导体探测器。探测器把X 射线转变为信号,这些很弱的信号被放大,并送到信号处理机箱做进一步处理。 2. 技术指标 一般指标 通道尺寸:500*300 650*500 800*650 1000*800 1000*1000 传送带速度:0.2m/s 传送带最大负荷:200kg 分辨力:直径0.10mm 金属线 穿透力:>30mm 胶卷安全性:对ISO1600 胶卷安全 泄漏剂量:<1.5 Qy/h
AGV中文操作手册
A G V中文操作手册https://www.360docs.net/doc/0113723092.html,work Information Technology Company.2020YEAR
AGV 操作手册
目录 1.AGV基本介绍 (1) 1.1AGV系统构成 (1) 1.2AGV人机界面介绍 (3) 1.2.1车体主面板 (3) 1.2.2行走手控盒 (4) 1.2.3举升操作面板 (6) 2.AGV基本操作 (7) 2.1AGV车体主面板操作方法 (7) 2.1.1 面板显示 (7) 2.1.2 设备状态菜单选择 (8) 2.1.3 参数设置 (16) 2.1.4 特殊操作 (18) 2.2AGV行走手控盒操作方法 (23) 2.2.1 行走操作 (23) 2.2.2 速度设置 (24) 2.2.3自动对线 (25) 2.3AGV举升面板操作方法 (25) 3.AGV运行方法 (26) 3.1AGV开机通电操作 (26) 3.2AGV关机断电操作 (27) 3.3AGV运行方式选择 (27) 3.3.1 在线运行方式 (27) 3.3.2 离线运行方式 (28) 3.3.3 手动运行方式 (29) 3.4AGV退出系统操作 (29) 3.4.1 AGV从运行任务中的退出 (29) 3.4.2 AGV安全退出控制台系统 (31) 3.5AGV暂停方式 (31) 3.5.1 AGV安全暂停 (31) 3.5.2 AGV碰撞停车 (32) 3.6AGV动态装配流程 (32) 4系统工具及参数设置 (34) 4.1系统工具 (34) 4.1.1 I/O调试 (35)
4.1.2 Ping操作 (35) 4.1.3 IP设置 (36) 4.2系统参数设置 (36) 4.2.1 导航系统参数 (37) 4.2.2 车体轮系结构参数 (37) 4.2.3 系统管理参数 (39) 4.2.4 扩展设备参数 (39) 4.2.5 选择界面语言 (40)
AGV中文操作手册
AGV 操作手册
目录 1.AGV基本介绍 (1) 1.1AGV系统构成 (1) 1.2AGV人机界面介绍 (3) 1.2.1车体主面板 (3) 1.2.2行走手控盒 (5) 1.2.3举升操作面板 (6) 2.AGV基本操作 (8) 2.1AGV车体主面板操作方法 (8) 2.1.1 面板显示 (8) 2.1.2 设备状态菜单选择 (9) 2.1.3 参数设置 (17) 2.1.4 特殊操作 (19) 2.2AGV行走手控盒操作方法 (27) 2.2.1 行走操作 (27) 2.2.2 速度设置 (28) 2.2.3自动对线 (29) 2.3AGV举升面板操作方法 (29) 3.AGV运行方法 (30) 3.1AGV开机通电操作 (30) 3.2AGV关机断电操作 (31) 3.3AGV运行方式选择 (31) 3.3.1 在线运行方式 (31) 3.3.2 离线运行方式 (32) 3.3.3 手动运行方式 (33) 3.4AGV退出系统操作 (33) 3.4.1 AGV从运行任务中的退出 (33) 3.4.2 AGV安全退出控制台系统 (35) 3.5AGV暂停方式 (35) 3.5.1 AGV安全暂停 (35) 3.5.2 AGV碰撞停车 (36) 3.6AGV动态装配流程 (37) 4系统工具及参数设置 (38) 4.1系统工具 (38) 4.1.1 I/O调试 (39) 4.1.2 Ping操作 (39)
4.1.3 IP设置 (40) 4.2系统参数设置 (40) 4.2.1 导航系统参数 (41) 4.2.2 车体轮系结构参数 (41) 4.2.3 系统管理参数 (43) 4.2.4 扩展设备参数 (44) 4.2.5 选择界面语言 (45)