Wavefront Propagation and Fuzzy Based Autonomous Navigation
Wavefront Propagation and Fuzzy Based Autonomous Navigation
Adel Al-Jumaily & Cindy Leung
ARC Centre of Excellence in Autonomous Systems, Mechatronics and Intelligent Systems Group,
Faculty of Engineering,
University of Technology, Sydney
PO Box 123 Broadway NSW 2007 Australia
adel@https://www.360docs.net/doc/0416198091.html,.au, cleung@https://www.360docs.net/doc/0416198091.html,.au
Abstract:Path planning and obstacle avoidance are the two major issues in any navigation system. Wavefront propagation algorithm, as a good path planner, can be used to determine an optimal path. Obstacle avoidance can be achieved using possibility theory. Combining these two functions enable a robot to autonomously navigate to its destination. This paper presents the approach and results in implementing an autonomous navigation system for an indoor mobile robot. The system developed is based on a laser sensor used to retrieve data to update a two dimensional world model of therobot environment. Waypoints in the path are incorporated into the obstacle avoidance. Features such as ageing of objects and smooth motion planning are implemented to enhance efficiency and also to cater for dynamic environments.
Keywords: possibility theory, wavefront propagation,autonomousrobot, indoor environment.
1. Introduction
Navigation is a major issue that needs to be addressed in order to facilitate the tasks required for autonomous systems. In particular, path planning and obstacle avoidance that enable an autonomous mobile agent to move effectively to its destination.
A principal challenge in the development of advanced autonomous systems is the realization of a real-time path planning and obstacle avoidance strategy which can effectively navigate and guide the vehicle in dynamic environments [Antonelli, 2001]. A path planned for an entity with partial knowledge of the environment can be invalidated with time. This can occur when unknown objects are detected or when objects move from their initial location, hence replanning of the path must be executed [Raulo, 2000].
The main purpose of the navigation system developed is to enable a mobile robot to navigate autonomously from its current location to any point on a map. In our work, the user need to provide the map. Specifications such as the size and resolution of the map are contained in the map provided. This map can be either empty (unexplored terrain with all cells unoccupied) or complete (contains walls). The update of the map with the objects, that are not included in the initial map, can be done by detecte such objects by the sensor. These objects are mapped and aged so they can be incorporated in the path and avoided effectively. Path planning is necessary to determine the gross motion required within the map and obstacle avoidance to modify the path to avoid collisions. Navigation techniques of mobile robots are generally classified into reactive and deliberative techniques. The reactive technique is easily implemented by directly referring to sensor information. However robots may sometimes fall into a deadlock in complicated environments [Fujimori, 2002]. Deliberative techniques conversely use models such as environmental map for navigation. Robotic systems of this sort have the advantage of being able to produce an optimal plan from building complete maps, but they are limited in the usefulness due to lack of real-time reactivity to an uncertain or dynamic environment [Taliansky, 2000]. Deliberative planning and reactive control are equally important for robot navigation; when used appropriately, each compliments the other and compensates for the other’s deficiencies [Rosenblatt, 1995]. It has proven useful for controlling mobile robots in man-made environments [Stoytchev, 2001].
The wavefront propagation algorithm is
a deliberative technique since it finds the optimal path based on previously mapped information. Possibility theory on the other hand corresponds to a reactive technique due to its decision making conducted in real-time from sensor. By combining these two techniques, an optimal path can be planned using information from the
Al-Jumail, A. & Leung, C. / Wavefront Propagation and Fuzzy Based Autonomous Navigation, pp.093-102, International Journal of Advanced Robotic Systems, Volume 2, Number 2 (2005), ISSN 1729-8806
093
094
entire map and obstacles can be avoided by using laser readings within a range of 2R (i.e. twice the robot’s width) minimising computation and hence increasing response to obstacles, allowing optimality and efficiency. Initial implementation and testing of this navigation system was conducted on a robot simulator and later ported to the physical robot. The following sections provide details of how the implementation of the system was approached. Section 2 provides details of the physical attributes and constraints of the robot. Section 3 explains the criteria used in selecting suitable path planning and obstacle avoidance algorithms. Section 4 provides an overview of the additional features implemented to enhance the performance of the system. Furthermore, an examination of the limitations and results obtained from experimentation are included in Section 5. Finally, Sections 6 and 7 contain the conclusion and recommendations for the future respectively.
2. Physical Attributes
This navigation system is developed for the Pioneer 2DX indoor mobile robot. It has a built in computer system
and is equipped with a number of sensors such as sonar
and lasers. The information from the laser is used for this project. This laser scans 180 degrees across the front of
the robot.
In addition, the robot is equipped with position encoders
allowing the displacement from the initial starting
location to be calculated. This is used to localise the robot during simulation and testing.
Other attributes of the robot include differential motors
enabling the robot to turn on the spot, and wireless
communication allowing control from a remote computer. The robot and its devices are interfaced through a Player client. Simulation or the world is
achieved using Stage. (Available from https://www.360docs.net/doc/0416198091.html,)
The dimensions of the robot are 33cm in width and 44cm
in length. For this system, an assumption is made that the
robot is round with a diameter 55cm which is the longest
distance through the centre of the robot. By shrinking the
robot conceptually to a single point, while the obstacle
perimeter is enlarged by half of the robot’s largest
dimension allows the robot to be guided around obstacles. This method, known as “configuration space
approach”, is the easiest method to cater for the robot’s
dimensions. It works well with relatively small, circular-footprint mobile robots [Hong, 2000].
3. Algorithms Implemented
Several algorithms and techniques used to aid in autonomous navigation were analysed and assessed for their suitability for the implementation on an indoor mobile robot. The criteria used in the assessment were developed based on the scope and objective of the navigation system. The main objective is to enable the robot to move effectively to its destination. One of the assumptions made in the development of the system was that a two dimensional occupancy grid based map is provided by the user. Hence the algorithm selected is to be compatible with a grid based map. Information from the map is to be updated frequently according to new sensor information as a result the path needs to be replanned regularly. Taking in account that the algorithms requiring low amounts of computation are desirable to enable fast response to dynamic objects since the robot is continually processing sensor information. Two have been selected to be implemented for the navigation system.
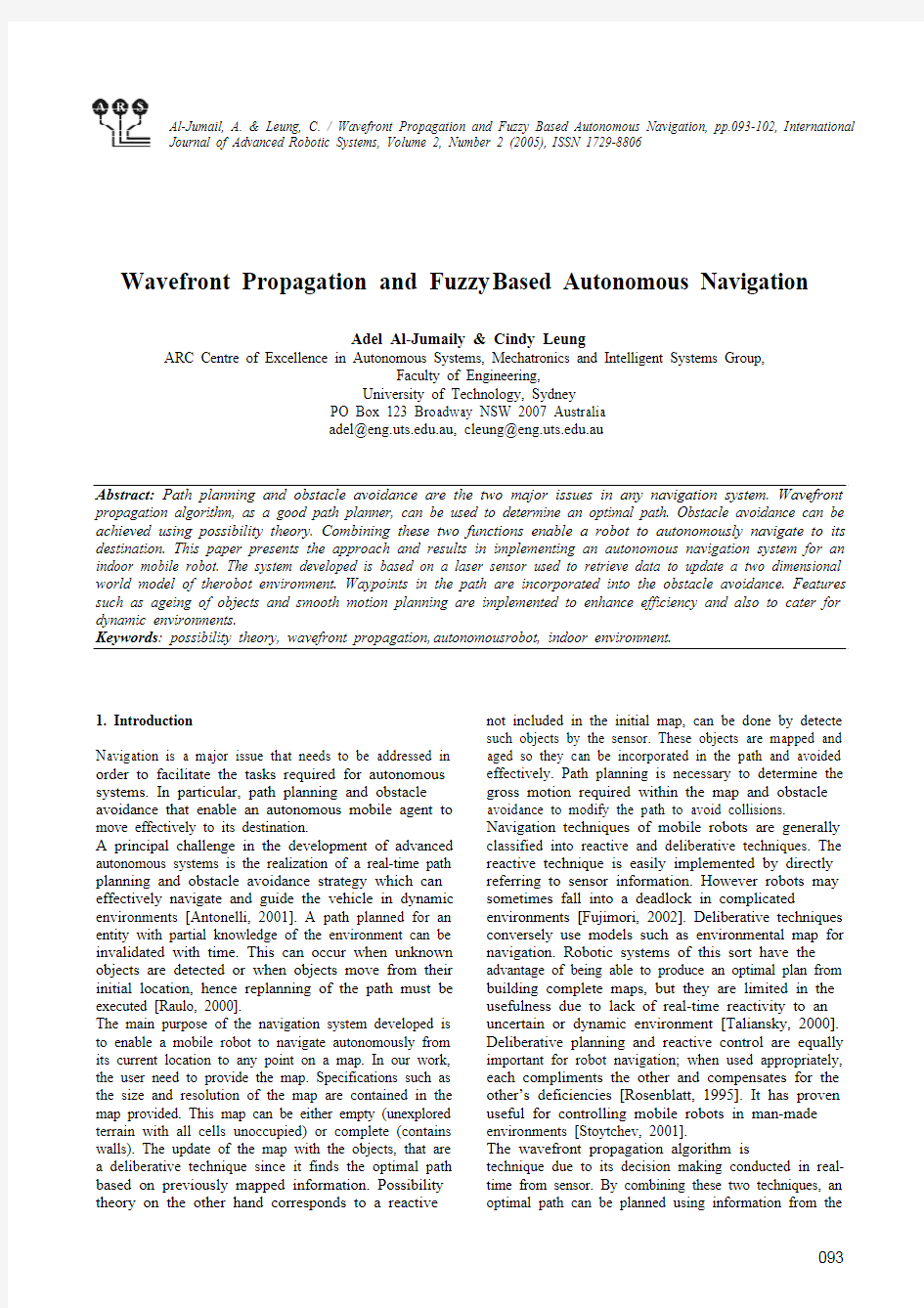
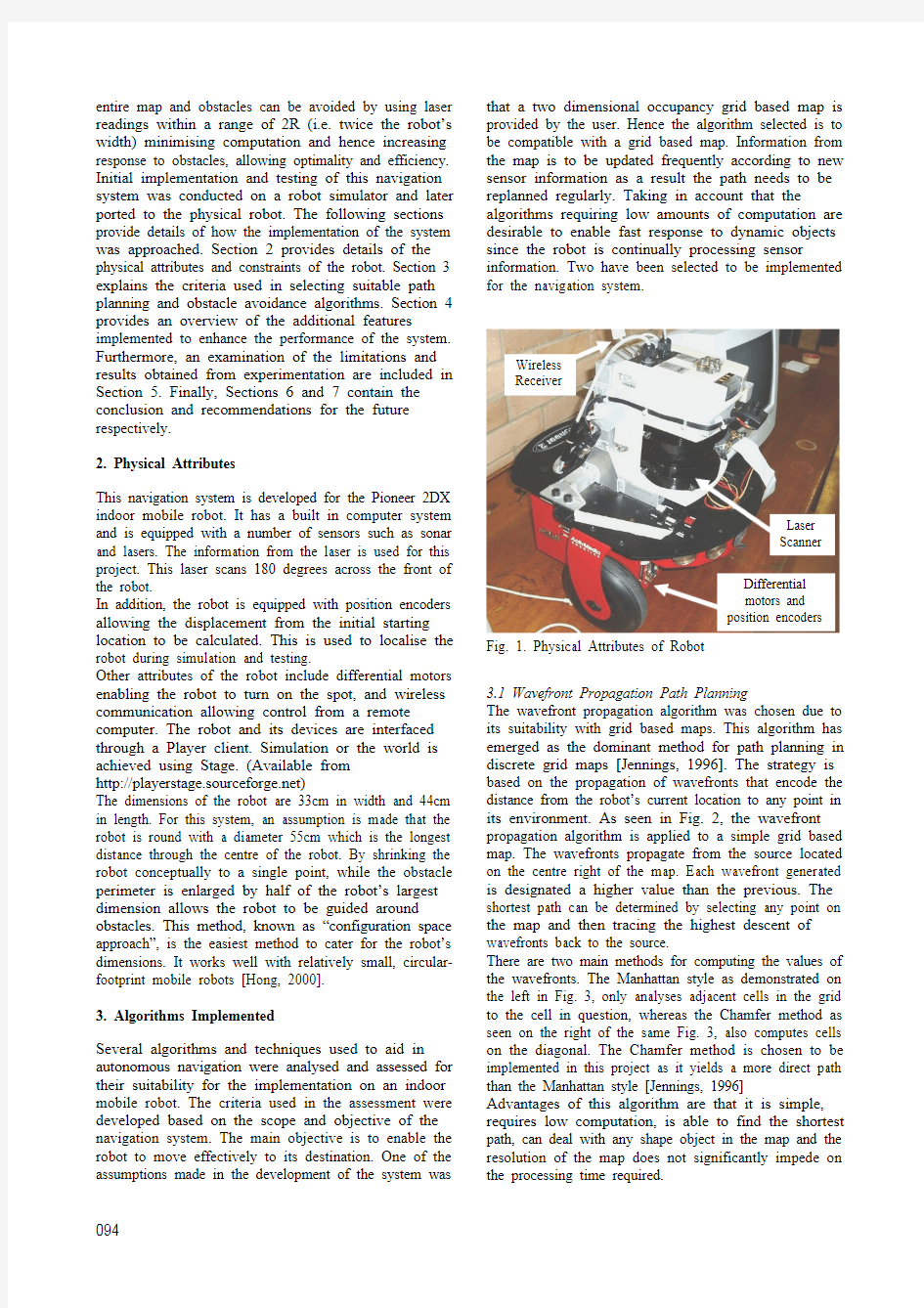
Fig. 1. Physical Attributes of Robot 3.1 Wavefront Propagation Path Planning The wavefront propagation algorithm was chosen due to its suitability with grid based maps. This algorithm has
emerged as the dominant method for path planning in discrete grid maps [Jennings, 1996]. The strategy is
based on the propagation of wavefronts that encode the distance from the robot’s current location to any point in its environment. As seen in Fig. 2, the wavefront propagation algorithm is applied to a simple grid based map. The wavefronts propagate from the source located on the centre right of the map. Each wavefront generated is designated a higher value than the previous. The shortest path can be determined by selecting any point on
the map and then tracing the highest descent of wavefronts back to the source. There are two main methods for computing the values of the wavefronts. The Manhattan style as demonstrated on the left in Fig. 3, only analyses adjacent cells in the grid to the cell in question, whereas the Chamfer method as seen on the right of the same Fig. 3, also computes cells on the diagonal. The Chamfer method is chosen to be implemented in this project as it yields a more direct path than the Manhattan style [Jennings, 1996] Advantages of this algorithm are that it is simple, requires low computation, is able to find the shortest path, can deal with any shape object in the map and the resolution of the map does not significantly impede on the processing time required.
Laser
Scanner
Wireless Receiver
Differential motors and position encoders
Fig. 2. Wavefront Propagation Applied to Map
1
1 0 1
1
Manhattan Chamfer
Fig. 3. Wavefront Propagation Methods
However there are some disadvantages with this algorithm that were to be overcome. These include: - assumption that the width of the robot is within a single grid cell and that the path planned cuts extremely close to walls or objects. Section 4 will describe the additional features implemented to overcome these limitations. In the event that the path becomes invalidated due to new sensor data, an obstacle avoidance algorithm is required to supplement this path planning algorithm.
3.2 Possibility theory for Obstacle Avoidance
When the robot detects that there is an obstacle in its path that it is following then it needs to be able react quickly to avoid it. Possibility theory algorithms, as a basis for fuzzy logic, were chosen to be implemented due to its ability to make decisions in real time and its ability to be tailored for the robot and the environment.It promises an efficient way for obstacle avoidance [Cang, 2003].
Possibility theory deals with the uncertainty [Dubois, 1996]; in this case the uncertainty of the location of obstacles. These uncertainties originate from the errors in the laser readings, errors due to lag as the robot is turning or moving at high speeds and noise from dust particles. The rules of possibility theory are similar to probability theory, but use either MAX/MIN or MAX/TIMES calculus, rather than PLUS/TIMES of probability theory. PLUS/TIMES calculus however does not validly generalise nondeterministic processes, while MAX/MIN and MAX/TIMES do, giving it an advantage as a representation of non-determinism in systems [Drainkov, 2001].
As mentioned previously, only the objects on the map within an area with a radius of 2R of the robot are subjected to the possibility theory. This is to minimise computation and enhance response time to obstacles.
A possibility distribution is a normal fuzzy set where at least one membership grade equals one. Fig.s 4 and 5 show the membership functions of the normalised angle
and distance fuzzy sets used to fuzzify the laser readings
of each scan. These membership functions are then subjected to the fuzzy rules which were developed and adjusted based on experimental results.
The fuzzy rules in Table 1 and 2 are the reasoning used
to determine the speed and turn-rate required of the robot based on the angle and distance of the obstacles. Negative turn-rates denote a clockwise turn and obstacles
with a negative angle are on the right of the robot. Generally these rules, as shown in Table 1 state that if there is an obstacle on the right then turn left and vice versa. Table 2 states that if there is an obstacle close to
the front of the robot then slow down.
Maximum of minimum fuzzy inference method was chosen to determine the speed and turn-rate fuzzy sets
due to its simplicity. It is calculated for each reading in a laser scan within a range of 2R. Centre of Area was used
in the implementation for defuzzification because it was deemed to be the ideal technique [Leyden, 1999]. This is calculated for the final fuzzy sets of the speed and turn-
rate membership function as shown in Fig.s 6 and 7 respectively. To avoid hard-coding the rule when deciding which direction the robot should turn when there are obstacles
Fig. 4. Obstacle Angle Membership
Fig. 5. Obstacle Distance Membership
Table 1. Fuzzy Rules for Speed
Table 2. Fuzzy rules for Turn-rate
Angle
Speed
PM PS ZE NS NM
ZE PS ZE ZE ZE PS
PS PS ZE ZE ZE PS Distance
PM PM PS ZE PS PM
Angle
Turn-rate
PM PS ZE NS NM
ZE NS NM NM or
PM PM PS
PS ZE NS NM or
PM PS ZE Distance
PM ZE NS NS or PS PS ZE
ZE PS
PM 1
0 0.5 0.6 0.8 1 1.2 1.4 2 (R)
NM NS
ZE
PS
PM 1
-180 -90 -40 -30 -5 0 5 30 40 90 180
Source of
wavefronts
095
096
directly in front of the robot, these rules are modified dynamically depending on the location of the next waypoint in the path. This is achieved by applying an additional condition to the rules in Table 2 for obstacles in the angle range of ZE. This condition checks the location of the next waypoint and determines if it is on the left or the right of the robot. The resultant rule would be to turn the robot towards the waypoint by choosing one of the alternatives shown in Table 2. Hence the path is incorporated in the obstacle avoidance decision making.
The turn-rate is determined using this possibility theory algorithm. Once the turn-rate is computed to be close to zero then it is assumed that the obstacles have been avoided and a new path is planned. However this assumption is not always correct as there are occasions where the turn-rate may be computed to be zero while there are still obstacles around. This may occur when there are many obstacles surrounding both sides of the robot and the centre of area calculation may result in zero. This disadvantage of the possibility theory algorithm can be compensated by the wavefront propagation algorithm by re-planning and avoiding the obstacles. This is one example where these two algorithms complement each other in reducing their limitations and enhancing their advantages.
4. Additional Features of the System
Several features were implemented to compensate for the limitations of the algorithms chosen and to increase the safety of the robot. Other features were implemented to enhance the performance of the system in a dynamic environment and to provide a smooth motion.
Fig. 6. Speed Membership
Fig. 7. Turn-rate Membership
4.1. Thickening of Walls and Objects
As mentioned previously in Section 2, the “configuration
space approach” is used so obstacles need to be enlarged.
The walls are thickened by half the robot’s width and a
designated safety distance. The thickening of walls solves two main issues encountered with the wavefront
propagation algorithm. Since the wavefront propagation
algorithm assumes that the robot is less than a single grid
cell wide, paths can be planned though any gap in a wall
that is a single grid cell. The other problem is that the
path generated from this algorithm cuts extremely close corners to maintain the shortest path. In this case the path planned can be so close to the wall that it does not allow for the width of the robot or enough safety distance for the robot to pass. By thickening the walls, paths that are too narrow for the robot to pass are blocked and paths are planned further away from the actual wall. As a result, safer paths can be planned. Through experimental results a safety distance of 7cm and half the robot’s radius (the robot is assumed to be round, so that there is always enough room for the robot to turn on the spot to escape from local minima) was determined to be the most beneficial by allowing sufficient space to manoeuvre and maintaining efficiency.
4.2 Smooth Motion Planning and Waypoints
Once the path has been planned then the robot is instructed to follow the path. However the path from the wavefront propagation algorithm is in the form of steps consisting of specific grid cells. It is difficult to follow a path cell by cell due to the accuracy and the constant stopping and checking for the next cell, hence the path is converted to a format that the robot can follow such as steps consisting of angle and distance to travel. This is achieved by determining the relationship between cells and grouping cells heading in the same direction.
Subsequent to this, there is still the problem that the path followed the lines of the wall. This means that if the wall is jagged then the resulting path would also be jagged. This problem is overcome by ignoring steps that were less than a designated minimum distance. The distance of the step ignored would be maintained in the path without the robot changing the direction. After this alteration to this path there is no longer a guarantee that the objects would be avoided. However with the assumption that the obstacle avoidance algorithm works in that it avoided any objects in the path that the robot takes then this
minor detour from the initial path is allowable as it
would increase the smoothness of the robot’s motion
quite significantly. The waypoints used for the obstacle
avoidance algorithm is designated to be the last cell of each step of this smoothed path.
Once the jagged steps are removed, the robot continues to move in a stop-start motion as it must stop and turn before moving forward. This is not desirable as the motion does not seem natural or smooth. The solution
implemented to solve this problem is to let the robot turn
in an arc, much like how a car turns a corner as seen in Fig. 8. The larger the angle the robot is required to turn the smaller the radius of the arc. This increased the efficiency of the turn however it further increased the diversion from the initial path. This is due to the robot cutting corners as it turns an arc. Hence there is increased reliance on the obstacle avoidance algorithm and the path planning is only used
as a guideline on which path to take. Much like travelling in a car from one place to another, a path can be chosen by selecting certain roads to take. While the car is in motion, any obstacle avoidance or driving skill does not rely on the path chosen. NM NS ZE PS PM 1
-60 -40 -30 -10 0 10 30 40 60 (deg/sec)
ZE PS PM
1
0 (mm/sec)
097
Fig. 8. Turns arc instead of turning on the spot
4.3. Mapping and Ageing of Objects
When moving around, it is desirable to ensure the data on the location of obstacles are correct. The map is updated with objects by mapping the laser readings. When the number of occurrences an object is detected to be in a particular cell exceeds a designated threshold the object is deemed to exist. In a dynamic environment objects can move or be moved. Hence new data is preferred [Singh 2000]. If all objects that were detected by the laser were mapped each time they were seen, and remapped as they changed their location, then the map could soon accumulate so many objects such that it would be completely occupied and there would be no more free space for the robot to move. The robot would be trying to avoid obstacles that are no longer in the same position as when it was detected.
Ageing of the objects allow for the objects that have not been recently detected by the laser to fade away as new and more recent information come to hand. This not only prevents the map from over cluttering with incorrect information but also removes the necessity for the system to repetitively perform ray-tracing to clear the grid cells between the robot and the obstacle detected. An effective ageing factor is determined from results of experimentation, variable depending on the speed of the robot and the threshold used for mapping. See 5.5 for resultant aging factor.
4.4 Controlling Robot Movement
The robot is controlled through the Player client and through the state machine that shown in Fig.9.
In Initialise State everything is initialised. Access is to the robot is requested and established. Access to all sensors established. The map file is obtained from the user, the current location of the robot on the map, and the destination is also obtained from the user. This state is entered upon start-up. It is left once all attributes have been initialised. While the prepare map state incorporates adding obstacles to the map and growing the obstacles of the map. This state is entered upon completion of initialisation procedures and is left once the map is prepared. It can also be entered from the obstacle avoidance state once the fuzzy logic controller has determined that the steering angle does not need to change. For the Plan Path the current attributes such as current location of the robot and the destination are
checked to determine if a path can be planned. This state is left when the either the destination or the current location are occupied on the map. The path is planned in this state and once this is completed, it exits this state. If the path is not able to reach the destination this state is left.
While in the follow path, the robot is in motion and following the path. When the fuzzy logic controller determines that the current steering angle is required to change, the system leaves this state. This state is also exited when the destination is reached. At avoid obstacles state the robot follows the steering determined by the fuzzy logic controller. Once the steering angle no longer requires to be changed this state is left. This state is also left once the destination has been reached. Final state is stop state which in it the robot is stopped and the system is terminate.
Fig. 9. State Diagram of robot movment
5. Results of Experimentation
Various functional and performance tests were conducted on the system. The system was tested under different scenarios to analyse how the system copes in different environments. Attributes of the system were also altered to determine how they affect the performance and functioning of the system.
5.1 Limitation with Grids
Function testing revealed several limitations of this system. This first limitation results from the limitation of
Turns arc instead of Distance of straight line decreased to compensate
dealing with occupancy grid based maps. Due to the layout of cells, each node processed in the path planning can only travel in eight directions limiting the angle of steps in a path to a minimum of 45°.
It is evident from Fig. 10 that with an empty map, the path still contains a turn. The shortest path between any two points is a straight line. Hence the path developed when the two points are not at a 45° angle is not the optimal path. This is deemed as an acceptable limitation because in reality most destinations cannot be reached by travelling in a straight line as the real environment contains many obstacles.
5.2 Safety vs. Efficiency
Another limitation discovered is that there are compromises between safety and efficiency. When there are walls for the path to be planned around, a safety distance is allocated and hence the path is no longer the shortest. It is evident from the first window in Fig. 11. that the resulting path from allowing the safety distance is not the shortest.
Issues that arose with a small safety distance include frequent alterations to the path triggered by the obstacle avoidance component. This component would detect the wall as an obstacle due to the small distance allowed for the robot to travel and hence an attempt would be made to move the robot away from this obstacle. By increasing the safety distance used in the path planning or decreasing the sensitivity of the obstacle avoidance then this interruption would be less frequent. However decreasing the sensitivity of the obstacle avoidance would increase the likelihood of a collision. Hence increasing the safety distance is the preferred option. There are other concerns from increasing the safety distance in the path planning. When a path is to be planned through a narrow gap between walls, as seen in Fig. 11, the narrow path is completely blocked and hence the path is planned on a longer route. The path is further away from the wall hence the distance travelled also longer in this respect. Furthermore increasing the safety distance decreases the chance of a successful path planned. This is due to a grater chance that the robot lies in a grid cell that is occupied by the safety distance. Hence efficiency of the system is compromised when safety is taken into account.
Our soluation to solve these two problems is the thicke the walls to prevent the path being planned too close to the walls and it also fills in small gaps in the walls that are smaller than the width of the robot. Expanding obstacle boundaries to include the effective radius of a mobile robot allows the robot’s center to be treated as a reference point.
Fig. 11 shows a path planned with a safety distance of 5cm. The walls contained in the initial map are in blue and the thickened walls are indicated by cyan. The path generated, in black, extends from the top right to the bottom right of the map, passing through the narrow gap. Due to the path’s proximity to the wall there are many interruptions from the obstacle avoidance component as the robot follows this path. Fig. 12 shows a path planned with a safety distance of 15cm. This minimises the interruptions from the obstacle avoidance but the efficiency of the path is significantly diminished due to the blocked path. Determining a suitable safety distance is accomplished by analysing experimental results. A decision is made on how narrow a path can be before it is considered too narrow for the robot to traverse.
Fig. 10. Limitation to 45 degree turn in path
Fig. 11. Path planned with small safety distance
The amount of safety distance is required for moving at the set speed and how many interruptions from the obstacle avoidance are deemed acceptable for travelling a certain distance. As mentioned previously a safety distance of 7cm was deemed the most appropriate to cater for movement and maintaining efficiency. This safety distance allowed the physical robot to plan paths through doorways in the laboratory and also allowed the robot to manoeuvre through narrow gaps in the simulation world without too much interference from the obstacle avoidance component.
5.3 Continuous Backtracking
Further testing revealed other concerns when the robot would revert to a previously attempted path. This occurred under several scenarios. The first scenario is when the robot plans the shortest path to the destination and finds that this path is blocked. It then continues to plan another path which is longer than the first. As it starts following the second path the object is sufficiently aged so that when a path is re-planned, a path can be planned though the object having the shorter distance. The robot has yet to travel far enough to commit to the second path and hence returns to the blocked entrance. This scenario can continue forever. Decreasing the ageing factor of objects would reduce this problem by allowing more time for the robot to commit to the alternate route. However there are issues that become
098
099
apparent by decreasing the ageing factor. The main problem discovered is the maintaining of undesired information. For instance, errors are generated when the robot is turning due to lag. These errors result in the walls becoming thicker than they are in reality. Problems arise when narrow paths appear to be blocked due to this effect. Decreasing the ageing factor would maintain this error and thicken the existing walls preventing the traversal through what would otherwise be a possible shorter path. Hence when a path is replanned the longer route is selected.
Fig. 12. Path planned with large safety distance
Alternatively if the ageing factor is high then this spray effect due to lag would not exist for long. Hence if the robot replans a path before taking the next step, the initial optimal path is regenerated and the robot would return to this narrow path. This may be a problem if the spiral effect continues to be regenerated as the robot would oscillate back and forth between the two paths. Another scenario resulting in continuous backtracking is when the destination is completely surrounded by objects. The robot would travel towards the destination. Upon discovering that the path is blocked, it moves around to the other opening which is also found to be blocked. By this time the objects along the initial path would have aged sufficiently that a path can be planned though it, so the robot returns to the previous path.
Fig. 13. Destination Unreachable
This can continue on forever until one of the objects is removed. As demonstrated in Fig. 13, the robot is provided with an empty map and the destination is completely surrounded. The recent objects are shown in magenta and the aged objects are in yellow. This scenario results from the ageing of static objects, primarily due to the assumption that objects can move or be moved. A solution to this problem is to enforce a timeout. If the robot takes a much longer time than expected to reach the destination then a timeout can be triggered. This requires estimation of travel time in regards to map size or path length. Alternately, determining which objects to age is another possible solution. If the value of an occupied cell is greater than a selected threshold then it may be regarded as static and hence not aged. This technique is considered to be viable. However due to time constraints, this navigation system was not retested with this feature. Although this system does distinguish between walls (initial data on the map provided) and objects whereby walls are not aged.
5.4 Speed vs. Accuracy and Safety
Increasing the speed of the robot does not always guarantee that the robot would reach its destination in a shorter time as other issues arise. The faster the robot moves, the less scans it takes of the same area. Therefore occupied cells have less opportunity to build up past the threshold and maintain the occupied state. This results in the same effect as a high ageing factor. Objects disappear quickly and the robot tends to return to a previously attempted path.
With greater speeds, the robot also requires stronger control action to avoid obstacles. Larger angles must be turned or reaction time must be decreased. This application is tailored for slower speeds of approximately 200mm/sec. If the robot is run at speeds higher than this limit then safety of the robot is compromised as the reaction time of the robot may not be quick enough or the angle turned may not be large enough.
Another issue discovered in testing is that walls appear jagged and to overlap when the robot is travelling at high speeds. This may be due to a greater difference between the forward speed and the turn-rate.
Furthermore, from running the robot at slower speeds, benefits result such as objects becoming well defined and having a lower impact if it crashes. However, it may take longer for the robot to reach its destination; hence safety and accuracy are compromised by speed.
The system performs well at the initial speed of 100mm/sec however this pace is too slow. Doubling the speed to 200mm/sec improved the efficiency of the robot and the obstacle avoidance was required to be adjusted to cater for this speed. When retested at 200mm/sec the system performed well. The speed was increased once more to 300mm/sec. This caused slight problems in the mapping due to increased lag as a result of the higher speed. Further increase of the speed made the system unpredictable. Hence testing on the physical robot was limited to a speed of 200mm/sec due to increased errors in the physical world while testing on simulation was
Destination
allowed to be 300mm/sec due to an ideal environment. 5.5 Effect of threshold on mapping
As part of the component to avoid obstacles, objects are mapped so they can be processed in relation to the location of the robot. When mapping objects, the system takes scans of the environment at different instances of time and accumulates this information. A threshold is applied to the mapping of objects to filter out noise and undesired information.
Increase of this threshold results in a faster rate of ageing of objects. Static objects in the environment take longer to be detected and dynamic objects would struggle to appear on the map. Dynamic objects are aged significantly faster than static objects. This is due to the cell count of the map having a lower value because the object is not detected to be in the same cell for long periods of time. Objects appear and disappear quickly with a high threshold. Hence system response to avoid obstacles is greatly diminished. Similarly to applying a high ageing factor, the limitation of undesired backtracking is also apparent with a high threshold. Decrease of the threshold results in objects appearing faster and are maintained longer. However errors in readings such as the readings taken when the robot is turning that give a spraying effect also appear. Hence the system’s response incorporates obstacles that exist and those that are errors in readings. Consequently the system becomes extremely sensitive and prone to error. Therefore the threshold used to map objects has similar limitations and effects as the ageing factor. System response is compromised by obtaining valid data. A threshold of 7 was found to be the most suitable for this system with an ageing factor of about 0.14 with a speed of 300mm/sec in simulation. Whereas an threshold of 10 with an aging factor of 0.1 with a speed of 200mm/sec performed well in the real-world environment.
5.6 Empty Map vs. Complete Map
The direction of movement and planning is based on the map provided and the initial location of the robot positioned on the map. There were many differences found between using an empty map and a complete map. This was only tested in simulation due to the unavailability of a complete map of the walls of the laboratory. The obvious difference is that the initial path planned in an empty map could be far from the final path taken whereas the initial path planned on a complete map remains fairly close to the path travelled. Hence a complete map would result in a more efficient path. Another obvious difference, apparent as a result of an inadequate localiser, is that the starting location does not have to be specific with an empty map as the robot can be positioned anywhere. However when using a complete map, the robot must be positioned fairly accurately on the map so as the objects sensed are closely related to those on the map otherwise errors would accumulate significantly. These issues would be solved pending integration with a decent localiser which determines the location of the robot based on data retrieved from the environment. 5.7 Exploration
When the robot is provided with an empty map exploration can be conducted. The system treats all the walls as objects hence anything detected by the laser is mapped. Once the objects are mapped they can be avoided and hence the robot is able to reach its destination without much prior knowledge of the environment. It only requires the general direction in which to travel in relation to its current position denoted by the destination provided by the user. This was achieved successfully both on the physical robot and in simulation. However at times, the robot may run off the map when avoiding obstacles because it is of the fixed map size provided by the user.
Fig. 14 shows an exploration sequence that was conducted during testing. The first window shows an initial path generated from an empty map from the robot’s location to the destination. This path is a straight line because there were no obstacles on the map when it was generated. As the robot starts following this path it discovers that there are obstacles in the way which invalidates the current path. When these obstacles are avoided, the system generates a new path around the obstacles as seen in the window on the top right. This step is repeated as the robot continues to move and discover new objects. The old objects start to age as depicted by the fading pixels in the third window. Continuing on to the fourth window, the centre right window in Fig. 14, the objects that were first detected have aged sufficiently that the robot is able to plan a path through them thinking that it is a shorter path and the objects have moved. It returns to discover that the objects are still there and plans a new path once again. The robot follows this new path and continues to map objects and regenerate the path until it reaches the destination as demonstrated in the final two widows. This test proved the robot is able to successfully reach its destination while avoiding the objects.
5.8 Dynamic Objects
In one other scenario that was tested, the robot is placed in a world with two other robots. These two other robots move about in a random manner while avoiding walls. The robot is to move from the top right of the map to the bottom left of the map, as seen from the initial path planned in the top right window of Fig. 15 The sequence of windows in Fig. 15 show the robots moving in the world on the left and current information gathered about the world on the right.
The first set of windows in Fig. 15 shows the robot following the initial path. It then discovers that there is an obstacle in its path and avoids it by applying possibility theory on the laser readings even before the object been detected a sufficient amount of times to be second set of windows. The robot then follows the new path until the destination is reached. The path remain relatively smooth except when the system forces the mapped. Once avoided and the object is mapped, a new path is planned avoiding the obstacle, as seen in the robot to follow a new path after obstacles are avoided in which case the path may be heading a completely different
100
101
direction to the initial path as seen in Fig 14. A similar scenario is created for the physical robot. The two random walking robots are replaced with humans standing in the robot’s path. The robot uses the same algorithm to successfully navigate around the humans.
5.9 Map resolution
The system was tested with a map with a resolution of 500 by 500 cells and a 100 by 100 cell map, both representing an area of 10m by 10m, as shown in Fig. 16. There was no noticeable difference in the speed of processing map information for path planning and obstacle avoidance although it is obvious that a larger map would require larger amounts of processing. Both map sizes generated paths in a few milliseconds. Perhaps a larger variation in the resolutions would provide a more apparent difference.
Fig. 14. Exploration Sequence
The main noticeable difference between these two sizes was the detail contained in the map. The map with the higher resolution is more accurate and contains more detail than the lower resolution map. Therefore there is a compromise between accuracy and speed. Accuracy is preferred because this is not a direct relation. Although, having a map with a higher resolution than the precision of the laser readings or position proxy is useless.
5.10 Simulation vs. Real-world
Experimentation on the physical robot was conducted using an empty map, due to the unavailability of a map of the laboratory. The robot is placed at an arbitrary position at the centre of the map facing 90 degrees. The destination is the selected as a distance relative to the
robot’s current position. The robot is then instructed to move to its destination while avoiding obstacles and treating walls as objects. This was achieved successfully however the majority of experimentations were conducted in simulation due to the short battery life of the Pioneer.
6. Conclusion
This paper has discussed the design and results of experimentation of the navigation system developed for an indoor mobile robot. In conclusion, the goal of enabling the mobile robot to effectively reach its destination through autonomous navigation is achieved successfully. This approach has proven to work under various scenarios.
Fig. 15. Dynamic Objects
By incorporating the waypoints into the obstacle avoidance only minor deviations from the path were taken while avoiding obstacles. Obstacles that are not somewhat symmetrically surrounding the robot are easily avoided, however when the robot approaches a dead-end a new path is required to be generated to avoid the
Start
Destination
obstacles. By allowing a 7cm safety distance around the robot, the path remains fairly optimal. It is determined that the resulting path taken by the robot is relatively safe and efficient.
Fig. 16.Map resolution
7. Future Recommendations
This navigation system can be improved if it can be
integrated with a localiser that determines the robot’s
position according to information obtained from the
environment. A method such as a particle filter can be
used. The result of this would minimise accumulated
errors and reduce the impact of any errors in the initial
location of the robot obtained from the user.
Although this system is not focussed on map building,
there were occasions when the robot ran off the map.
When this occurs the system would stop the robot and
the user would need to restart the system placing the
robot back onto the map. This system can be extended to
enable the map to be expanded as the robot moves or
estimate the location of the robot and move it back onto
the map.
A method to be developed that determines the difference
between static objects and dynamic objects would
resolve the many limitations causing the robot to
continuously backtrack, as found during performance
testing. Not ageing objects that have a cell value greater
than a designated threshold could be implemented as a
viable solution. Or possibly ageing the static objects with
a lower ageing factor could prove to be a better solution.
Further experimentation is required to determine the
legitimacy of this solution.
Paths are not always direct due to the limitation of
format of grid cells. A method to relax the path could be
implemented so that the robot is able to travel through
paths that are not so rigid.
Acknowledgements
This work is supported by the ARC Centre of Excellence
programme, funded by the Australian Research Council
(ARC) and the New South Wales State Government.
8. References
Antonelli, G.; Chiaverini, S.; Finotello, R.; Schiavon, R.;
(2001). Real-time path planning and obstacle
avoidance for RAIS: an autonomous underwater
vehicle, IEEE Journal of Oceanic Engineering, Vol:
26:2, April 2001, pp. 216 -227
Cang Ye; Yung, N.H.C.; Danwei Wang; (2003). A fuzzy
controller with supervised learning assisted
reinforcement learning algorithm for obstacle
avoidance, Transactions on Systems, Man and
Cybernetics, Part B, IEEE, Vol: 33, Issue:1, Feb.
2003 Page(s): 17-27
Drainkov D. (2001). Fuzzy Logic Techniques for
Autonomous Vehicle Navigation. D. Drainkov and
A. Saffiotti,eds. Springer-Physica Verlag, DE, 2001,
Pages: 25-47
Didier D., Fargier H., and Prade H. (1996). Possibility
theory in constraint satisfaction problems: Handling
priority, preference and uncertainty; Applied
Intelligence, volume 6, no. 4, Pages: 287-309.
Fujimori A.; Murakoshi, T.; Ogawa, Y. (2002). Industrial
Technology, 2002; Navigation and path-planning of
mobile robots with real-time map-building 2002
IEEE International Conference on IEEE ICIT '02,
Vol: 1, 11-14 Dec. 2002; pp: 7 -12 vol.1
Hong Y; Borenstein J; Wehe D. (2000); Sonar-based
Obstacle Avoidance for a Large, Non-point, Omni-
directional Mobile Robot, Spectrum 2000
International Conference on Nuclear and Hazardous
Waste Management, Chattanooga, TN, Sept 24-28
Jennings. C, Murray D, (1996). Stereo vision based
mapping and navigation for mobile robots,
Department of Computer Science,
University of British Columbia, Vancouver, ICRA.
Leyden M, Toal D, Flanagan C. (1999). A Fuzzy Logic
Based Navigation System for a mobile Robot,
Automatisierungs symposium Wismar,
Raulo, D.; Ahuactzin, J.-M.; Laugier, C. (2000).
Controlling virtual autonomous entities in dynamic
environments using an appropriate sense-plan-
control paradigm; (IROS 2000). Proceedings 2000
IEEE/RSJ International Conference on Intelligent
Robots and Systems 2000, Volume: 1, 31 Oct. - 5
Nov. 2000; Page(s):163-168
Rosenblatt, J.K.; Thorpe, C.E (1995). Combining
multiple goals in a behavior-based architecture 1995
IEEE/RSJ International Conference on Intelligent
Robots and Systems 95. 'Human Robot Interaction
and Cooperative Robots', Proceedings, Volume: 1, 5-
9 Aug. 1995, Page(s): 136 -141 vol.1
Singh S, Simmons R, Smith T, Stentz A, Verma V,
Yahja A, Schwehr K. (2000). Recent Progress in
Local and Global Traversability for Planetary
Rovers, Carnegie Mellon University, In Proceedings
International Conference on Robotics and
Autonomous, San Francisco CA, April 2000
Stoytchev, A.; Arkin, R.C. (2001). Combining
deliberation, reactivity, and motivation in the context
of a behavior-based robot architecture; Proceedings
2001 IEEE International Symposium on
Computational Intelligence in Robotics and
Automation, 29 July-1 Aug. 2001, Page(s): 290 -295
Taliansky, A.; Shimkin, N. (2000). Behavior-based
navigation for an indoor mobile robot The 21st IEEE
Convention of the Electrical and ELectronic
Engineers in Israel, 11-12 April 2000, pp: 281 -284 500x500 100x100
102
霍尼韦尔(Honeywell)智能家居系统解决方案
龙源期刊网 https://www.360docs.net/doc/0416198091.html, 霍尼韦尔(Honeywell)智能家居系统解决方案 作者: 来源:《物联网技术》2012年第11期 摘要:Honeywell HRIS-1000系统是基于TCP/IP协议和Ethernet网络平台的全数字化智能家居平台。该平台集成了丰富的居住环境控制及安防功能,而且各种功能可以协调统一,有机融合。文中介绍了Honeywell HRIS-1000系统的主要组成和系统功能。 关键词:智能家居;霍尼韦尔;解决方案;系统功能 具有120多年历史的霍尼韦尔(Honeywell)是世界自动化控制技术的领导者。霍尼韦尔自1980年起推出智能家居解决方案以来,陆续推出高集成社区规模智能家居系统家庭网关,可视对讲系统、无线灯光控制系统等。迄今为止,韩国已有200 000多户住宅使用霍尼韦尔的智能家居产品,在亚太其他地区,霍尼韦尔的集成智能家居解决方案也开创了许多成功案例,包括中国首个及最大的顶级智能社区深圳红树西岸、华北首个全集成智慧住宅天津赛顿中心、华东首个高集成智慧住宅杭州东方润园和中东迪拜的Old Town Commercial Island,霍尼韦尔 的可视对讲系统也正被广泛采用……事实上,全球有超过一亿个家庭和500多万幢大型建筑在使用霍尼韦尔的楼宇和住宅产品与技术。 1 智能住宅 随着国民经济和科学技术水平的提高,特别是计算机技术、通信技术、网络技术、控制技术、信息技术的迅猛发展与提高,促使了家庭生活的现代化,衣食住行的舒适化,居住环境的安全化。这些高科技已经影响到人们生活的方方面面,改变了人们生活习惯,提高了人们的生活质量,人类技术发展的最终目的和方向是服务于生活所需,智能住宅也正是在这种形势下应运而生的。 智能住宅是将家庭中各种与信息相关的通讯设备、家用电器、环境调节设备和家庭保安装置等,通过有线或无线网络连接到一个家庭智能化系统上进行集中的监视和智能控制,同时可以支持远程的监控,实现信息化家庭事务管理,并保持这些家用设施与住宅环境的和谐与协调。 2 系统介绍 Honeywell HRIS-1000系统是基于TCP/IP协议和Ethernet网络平台的全数字化智能家居平台。在这个平台上集成了丰富的居住环境控制及安防功能,各种功能协调统一,有机融合。家庭网关是户内控制和网络协议转换的中心,利用家庭网关使所有可能的设备信息互通,实现环
霍尼韦尔安防监控系统方案.(DOC)
霍尼韦尔健康舒适家居安防监控系统 钻石山设计方案 工程编号:20150331 二零一五年三月
霍尼韦尔家居系统优点 1、提供符合每位客户需求的定制解决方案 2、根据多年来的家居系统的经验和技术发展,提供可靠的解决方案 3、同一品牌的家居系统集成确保质量可靠、服务周到 霍尼韦尔家居系统的价值观 智能由于先进信息技术的广泛应用,霍尼韦尔的客户享受着更高标准的生活方式。 安全霍尼韦尔为您提供了最全面防范的安全体系,如高科技集成防盗和防火系统,门禁系统等。 舒适霍尼韦尔通过使用其全球顶尖的自动化控制技术,在水处理、空气质量、温度、湿度、安防、燃气安全、灯光和家居智能等方面,为您提供全面舒适的居住环境。 一、家庭安防监控系统简介: 近年来,随着我国经济的迅速发展,城乡居民的生活水平有了显著的提高,尤其是城镇居民的居住条件不断改善,人们在解决了居住问题后,日益关心的是居住是否安全,人们在购房时,安全性是考察物业管理水平是否完善的一个重要条件。尤其是那些流窜作案的犯罪分子,往往选择居民小区作为攻击目标,入室盗窃、抢劫、杀人案件屡屡发生,以往靠小区报安以人防为主的防范措施已满足不了人们的要求。利用安全防范技术进行安全防范首先对犯罪分子有种威慑作用,使其不敢轻易作案。如小区的安防系统、门窗的开关报警器能及时发现犯罪分子的作案时间和地点,使其不敢轻易动手。 家庭安防应有两重含义,一是指生命安全,二是指财产安全。 传统家庭安防是安装被动红外探测器,其特点是安装在室内,因此对室内无人值守时,其防盗保护财产的作用能够实现。而新型智能家庭防盗报警系统在感应端通过磁头、红外、煤气、烟感、玻璃破碎等探测器来感应异常变化,当感应器感应到异常情况,就会自动报警并把警情发送至相关部门和人员的电话上,以便得到及时的处理,减少人员伤亡和财产损失。 目前,家庭监控的业务模式是IP摄像机+各类报警探测设备+平台接入。在这样的模式下,用户离开时布防,发生意外情况时触发报警,报警信息以短信形式及时发送给用户,同时启动警铃并联动IP摄像机进行预置位转动、抓拍图片、启动录像等程序。用户收到短信后通过PC或手机登录并实时浏览现场视频,确认后采取处置措施,用户回来后撤防。 而对于家庭安防系统的建立,现阶段还需要专业队伍的安装和服务。目前,家庭安防工程主要有房产开发商委托安防工程商来完成。业主购房后若是要进行装修,就需要工程商为
BAS系统在地铁环境控制中的应用及实现
BAS系统在地铁环境控制中的应用及实现 发布时间:2009-7-20 文章来源:本站 1 概述 广州地铁一号线共有14个地下车站、2个地面车站和一座地铁控制中心(OCC)大楼,全长18.6公里,采用了集散控制系统(DCS)对地铁全线环控设备及其它车站机电设备进行集中监控,由于引进了楼宇控制概念,地铁车站设备监控系统亦被称为BAS(Building Automation System)系统。广州地铁一号线采用美国CSI公司的I/NET2000系统对全线环控系统进行监控,并对全线车站的扶梯、给排水设备、应急电源进行监视报警。 2 BAS系统在地铁环控中的作用及功能 2.1. 地铁BAS系统在地铁环控中的主要作用: 控制全线车站及区间的环控及其它机电设备安全、高效、协调的运行,保证地铁车站及区间环境的良好舒适,产生最佳的节能效果,并在突发事件(如火灾)时指挥环控设备转向特定模式,为地铁乘车环境提供安全保证。 2.2. 广州地铁一号线BAS系统主要功能: (1) 监控并协调全线各车站及OCC大楼通风空调设备、冷水系统设备的运行。 (2) 监控并协调全线区间隧道通风系统设备的运行。 (3) 对车站机电设备故障进行报警,统计设备累积运行时间。 (4) 对全线环境参数(温、湿度)及水系统运行参数进行检测、分析及报警。 (5) 接收地铁防灾系统(FAS系统)火灾接收报警信息并触发BAS系统的灾害运行模式,控制环控设备按灾害模式运行。
(6) 通过与信号ATS接口接收区间堵车信息,控制相关环控设备执行相应命令。 (7) 紧急状况下,可通过车站模拟屏控制环控设备执行相关命令。 (8) 监视全线各站及隧道区间给排水、自动扶梯等机电设备的运行状态。 (9) 管理资料并定期打印报表。 (10) 与主时钟接口,保证BAS系统时钟同步。 3 BAS系统对环控设备的监控原理及内容: 3.1. 环控系统组成: 大系统——车站公共区(站厅/站台)通风空调系统; 小系统——车站设备用房通风空调系统; 水系统——地下站冷水机组系统; 隧道通风系统——执行隧道区间正常及紧急情况下通风排烟工况的环控子系统。 3.2. BAS系统监控点数的配置: 以陈家祠站为例,纳入BAS监控的环控设备总数约100台(包括风机、风阀和水系统设备等),环控监控总点数约430点(包括温湿度等参数检测约60点),车站监控点数分布情况如下: (1) 隧道通风系统:BAS系统对4台隧道风机及联动风阀、两台推力风机和组合风阀进行监视控制,监视风机过载故障报警信号,检测两端隧道入口温湿度,共计点数DO 20点、DI 28点,AI 8点 (2) 车站大通风空调系统:BAS系统对空调机、新风机、回排风机及联动风阀和调节风阀等设备进行监视控制,监视风机过载故障报警信号,检测新/排/混/送风及站厅/台温湿度,控制组合风柜出水二通阀开度来调节空调器送风温度,共计DO 44点、DI 72点,AI 30点、AO 4点
霍尼韦尔智能家居系统解决方案
霍尼韦尔智能家居系统
地区总经销商鸣迅智能科技有限公司
目录 一、公司背景┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅2 二、智能住宅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅3 三、系统介绍┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅5 四、系统功能┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅6 1.系统整体介绍‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐6 2.防盗报警‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐6 3.灯光窗帘控制‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐9 4.地板采暖控制‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐10 5.空调控制‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐11 6.远程视频监控‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐12 五、主要产品说明┅┅┅┅┅┅┅┅┅┅┅┅┅┅13 1.控制面板‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐14 2.智能家居主机‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐15 3.智能控制模块‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐16 六、产品优势┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅19 1.品牌的优势‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐19 2.高度集成化的系统‐‐‐‐‐‐‐‐‐‐‐‐‐‐19 3.开放系统,国际标准的通讯协议‐‐‐‐‐‐‐‐20 4.稳定的产品质量‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐20 七、具体案┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅20 八、案例介绍┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅20 九、售后服务承诺┅┅┅┅┅┅┅┅┅┅┅┅┅24 1.售后服务主导思想坚持质量第一,用户至上的精神维护本公司的声誉,确保工程项目及产品售后服务发挥其应有的效能‐24
2.售后服务围‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐24 3.实施办法‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐24 一、公司背景 霍尼韦尔(Honeywell)公司是一家年销售额达300 亿美元,在多元化科技和制造业领域占据世界领导地位的跨国公司。在全球,其业务涉及航空产品及服务、住宅及楼宇控制和工业控制技术、自动化产品、特种化学、纤维、塑料以及电子和先进材料等领域。霍尼韦尔公司在全球95 个拥有10.8 万员工,总部设在美国新泽西州莫里斯镇。在纽约、伦敦和芝加哥太平洋证券市场的交易代码为HON。为道琼斯工业指数的30 家构成公司之一,也是“标准普尔500 指数”的组成部分。霍尼韦尔具有百年的历史,今天的霍尼韦尔一如既往地把创造一个安全、舒适、节能、高效、创新的人类生存空间作为Honeywell 品牌的第一承诺。霍尼韦尔公司以诚信的态度、优质的产品、精湛的服务和客户至上的原则,一步一个脚印地在中国市场辛勤耕耘、拓展。作为一家多元化的跨国公司,霍尼韦尔正在源源不断地将其各个部门的顶尖技术和产品带到中国。
地铁BAS系统现场网络结构的说明V1
关于地铁BAS系统现场级网络应用的说明 1、概述 地铁BAS系统作为综合监控系统的重要组成部分承担着地下车站机电设备监控以及紧急情况下防灾救灾的重责。由于地下车站机电设备分布广泛,因此BAS系统核心控制器及远程IO之间一般通过网络通信的形式连接。随着城市轨道交通技术的发展,国内外地铁环境与设备监控系统已经走过了各站分离的阶段,进入了全线组网的新阶段,设备监控多采用分散控制、集中管理的系统模式。目前BAS系统现场级网络主要有全总线和工业以太网两种实现形式。 由于现场总线技术的各种标准之间转换困难、系统集成存在各种壁垒等种种制约性,而相对的工业以太网的种种优势,随着全球工业自动化技术的不断进步,造成了BAS系统网络正在从现场总线向工业以太网方向发展的趋势。 2、工业以太网与现场总线比较 目前国内城市轨道交通BAS系统普遍采用PLC设备,是一个基于网络的自动化系统,涉及多种通信及网络技术,如用于装置控制层的现场总线技术。而由于现场总线标准存在12种之多,如何统一现场总线标准经过了16年的标准大战,最终没有形成一个统一的标准,多标准等于无标准,因此无论是最终用户还是制造商,普遍都在关注现场总线技术的发展动态,寻求高性能低成本的方案。以太网技术由于其开放性、稳定性和可靠性,在全球范围取得了巨大成功,因此如何对以太网技术进行改进,使
其适合应用于工业控制领域的数字通信,已成为业内近些年内的热门研究方向,很多人都寄希望于现场总线技术在以太网技术的基础上达成统一,改变目前多标准并存的现状,同时用以太网统一工业控制网络的各个层次,实现真正的无缝信息集成。BAS系统网络也随着工业以太网的发展,逐渐实现装置控制层设备由采用现场总线改变为工业以太网技术。 1) BAS系统采用工业以太网方案对比传统的总线方案具有以下优点: 传统双现场总线方案中,车站两端冗余PLC各自负责一端的BAS系统设备。对于车站内需要联动运行的部分设备,如正常模式下分布在车站不同端的风机、风阀联动、火灾模式下的两端空调系统联动等均需要两端的冗余PLC之间首先相互联动和确认设备状态到位后才能执行下一步动作。在常规地铁设计中,车站两端的冗余PLC虽然采用了热备方式,配置了两块背板、两块CPU、两块电源等,但所有的模块均放置在同一房间甚至同一面控制柜内,当房间内发生火灾或电源故障,容易引起冗余PLC整体故障。而一端的冗余PLC一旦退出服务,则另一端的冗余PLC则可能因为联锁动作失败而导致系统整体瘫痪。若采用光纤环网方式连接两端冗余PLC,若一端冗余PLC发生整体性故障退出服务,系统将立即切换到另一端的一套冗余PLC上继续工作,保证系统在极端恶劣的情况下能正常运行,中央和车站下达的指令能迅速传达到现场设备。 传统双现场总线方案中,双总线均采用平行布线方式,两条总线紧靠着
南京地铁BAS系统设计与应用
地铁BAS系统设计与应用 楼宇智能化系统所涉及的容众多。采用智能化系统分散管理。BAS系统利用计算机编程及网络通信技术,对这些设备的测量控制点进行集中管理和自动监测,对减少运行、操作、维护人力,保持设备的正常运转。地铁BAS(Building Automation System)本着“安全、可靠、节能”的原则进行设计,将现代科技的计算机及网络技术结合机电设备自动化控制原理,以专门的地铁环境通风空调及防灾处理等理论为基础的自动化控制系统,利用分布式微机监控系统对地铁车站及区间隧道的空调通风、给排水、照明、电梯、自动扶梯、导向标识等机电设备进行全面的运行管理与控制,在发生火灾或列车阻塞等事故情况时,能够及时迅速地进入防灾运行模式,根据火灾报警系统发送的着火点信息或列车自动控制系统发送的阻塞点信息自动调度送风和排风,进行通风排烟,引导人员疏散,极提高地铁运营的智能化和安全性。BAS可通过采用前反馈、后反馈众多调控形式进行实时在线运行与自动控制,并将在保证地铁热环境控制要求前提下,实现设备自动、稳定、安全、节能的运行。关键词PLC 楼宇自动化通风空调系统 目次 1 概述1 2 地铁1号线BAS系统监控对象及功能3 2.1 设计原则3
2.2 地铁1号线环境与设备监控对象4 2.3 BAS系统主要功能4 2.4 BAS系统的接口6 3 地铁1号线BAS系统的软件体系7 3.1 BAS系统软件的组成7 3.2 地铁BAS系统采用的第三方软件8 3.2.1 环境优化控制软件9 3.2.2 BAS与FAS通讯软件9 3.2.3 故障管理软件9 4 地铁BAS系统构成及网络结构9 4.1 BAS系统的构成9
地铁BAS系统
地铁BAS系统 2003年5月,国家质量监督检验检疫总局和建设部,联合发布了国家标准——《GB 50157-2003地铁设计规范》,标准中正式命名“环境与设备监控系统,Building Automation System(BAS)”,并对其定义为:“对地铁建筑物内的环境与空气条件、通风、给排水、照明、乘客导向、自动扶梯及电梯、屏蔽门、防淹门等建筑设备和系统进行集中监视、控制和管理的系统”。 基本功能: 1.机电设备监控 具有中央和车站二级监控功能; BAS控制命令应能分别从中央工作站、车站工作站和车站紧急控制盘(IBP)人工发布或由程序自动判定执行,并具有越级控制功能,以及所需的各种控制手段; 对设备操作的优先级遵循人工高于自动的原则; 具备注册和权限设定功能。 2.执行防灾及阻塞模式功能 能接收FAS系统车站火灾信息,执行车站防烟、排烟模式; 能接收列车区间停车位置信号,根据列车火灾部位信息,执行隧道防排烟模式; 能接收列车区间阻塞信息,执行阻塞通风模式; 能监控车站逃生指示系统和应急照明系统; 能监视各排水泵房危险水位。 3.环境监控与节能运行管理功能 通过对环境参数的检测,对能耗进行统计分析,控制通风、空调设备优化运行,通过地铁整体环境的舒适度,降低能源消耗。 4.环境和设备管理功能 能对车站环境等参数进行统计; 能对设备的运行状况进行统计,据此优化设备的运行,实施维护管理趋势预告,提高设备管理效率。 地铁BAS监控内容: 正常运营模式的判定及转换; 消防排烟模式和列车阻塞模式的联动; 设备顺序启停; 风路和水路的联锁保护; 大功率设备启停的延时配合; 主、备设备运行时间平衡; 车站公共区和重要设备房的温度调节; 节能控制; 运行时间、故障停机、启停、故障次数等统计; 配置数据接口以获取冷水机组和水系统相关信息; 若冷水机组带有联动控制功能,则空调水系统冷冻水泵、冷却水泵、冷却塔、风机、电动蝶阀的控制程序由冷水机组承担,BAS仅控制冷水机组的投切、监测空调系统的参数和状态、冷量实时运算、记录及累计。
BAS系统在地铁环境控制中的应用及实现
1 概述 广州地铁一号线共有14个地下车站、2个地面车站和一座地铁控制中心(OCC)大楼,全长18.6公里,采用了集散控制系统(DCS)对地铁全线环控设备及其它车站机电设备进行集中监控,由于引进了楼宇控制概念,地铁车站设备监控系统亦被称为BAS(Building Automation System)系统。广州地铁一号线采用美国CSI公司的I/NET2000系统对全线环控系统进行监控,并对全线车站的扶梯、给排水设备、应急电源进行监视报警。 2 BAS系统在地铁环控中的作用及功能 2.1. 地铁BAS系统在地铁环控中的主要作用: 控制全线车站及区间的环控及其它机电设备安全、高效、协调的运行,保证地铁车站及区间环境的良好舒适,产生最佳的节能效果,并在突发事件(如火灾)时指挥环控设备转向特定模式,为地铁乘车环境提供安全保证。 2.2. 广州地铁一号线BAS系统主要功能: (1) 监控并协调全线各车站及OCC大楼通风空调设备、冷水系统设备的运行。 (2) 监控并协调全线区间隧道通风系统设备的运行。 (3) 对车站机电设备故障进行报警,统计设备累积运行时间。 (4) 对全线环境参数(温、湿度)及水系统运行参数进行检测、分析及报警。 (5) 接收地铁防灾系统(FAS系统)火灾接收报警信息并触发BAS系统的 灾害运行模式,控制环控设备按灾害模式运行。 (6) 通过与信号ATS接口接收区间堵车信息,控制相关环控设备执行相应命令。 (7) 紧急状况下,可通过车站模拟屏控制环控设备执行相关命令。
(8) 监视全线各站及隧道区间给排水、自动扶梯等机电设备的运行状态。 (9) 管理资料并定期打印报表。 (10) 与主时钟接口,保证BAS系统时钟同步。 3 BAS系统对环控设备的监控原理及内容: 3.1. 环控系统组成: 大系统——车站公共区(站厅/站台)通风空调系统; 小系统——车站设备用房通风空调系统; 水系统——地下站冷水机组系统; 隧道通风系统——执行隧道区间正常及紧急情况下通风排烟工况的环控子 系统。 3.2. BAS系统监控点数的配置: 以陈家祠站为例,纳入BAS监控的环控设备总数约100台(包括风机、风阀和水系统设备等),环控监控总点数约430点(包括温湿度等参数检测约60点),车站监控点数分布情况如下: (1) 隧道通风系统:BAS系统对4台隧道风机及联动风阀、两台推力风机和组合风阀进行监视控制,监视风机过载故障报警信号,检测两端隧道入口温湿度,共计点数DO 20点、DI 28点,AI 8点 (2) 车站大通风空调系统:BAS系统对空调机、新风机、回排风机及联动 风阀和调节风阀等设备进行监视控制,监视风机过载故障报警信号,检测新/排/混/送风及站厅/台温湿度,控制组合风柜出水二通阀开度来调节空调器送风温度,共计DO 44点、DI 72点,AI 30点、AO 4点 (3) 车站小通风空调系统:BAS系统对空调机、送/排风机及联动阀、调节阀监视控制,检测设备/管理用房温湿度,控制小空调器出水二通阀开度来调节相关设备房的温度,共计DO 41点、DI 41点,AI 17点、AO 3点
霍尼韦尔智能家居系统解决方案
霍尼韦尔智能家居系统上海地区总经销商上海全宜智能科技有限公司
目录 一、公司背景 ------------------------------------------------------------------------------ 3 二、智能住宅 ------------------------------------------------------------------------------ 4 三、系统介绍 ------------------------------------------------------------------------------ 5 四、系统功能 ------------------------------------------------------------------------------ 6 1.系统整体介绍 (6) 2.防盗报警 (6) 3.灯光窗帘控制: (10) 4.地板采暖控制: (11) 5.空调控制: (12) 6.远程视频监控: (121) 五、主要产品说明 ---------------------------------------------------------------------- 14 1、控制面板 (14) 2、智能家居主机 (16) 3、智能控制模块 (17) 六、产品优势 ---------------------------------------------------------------------------- 20 1、品牌的优势: (20) 2、高度集成化的系统 (20) 3、开放系统,国际标准的通讯协议 (21) 4、稳定的产品质量 (21) 七、具体方案 ---------------------------------------------------------------------------- 22 八、案例介绍 ---------------------------------------------------------------------------- 22 九、售后服务承诺 ---------------------------------------------------------------------- 26 1.售后服务主导思想坚持质量第一,用户至上的精神,维护本公 司的声誉,确保工程项目及产品售后服务发挥其应有的效能。 26 2.售后服务范围 (26) 3.实施办法 (26)
浅谈城市轨道交通BAS系统的发展
浅谈城市轨道交通BAS系统的发展 发表时间:2011-12-28T13:33:37.657Z 来源:《时代报告》2011年11月下期供稿作者:陶汉卿[导读] 我国城市轨道交通系统迅速引入了基于计算机技术、自动控制技术和网络通信技术的各类自动化系统。 陶汉卿 (柳州铁道职业技术学院,广西柳州 545007) 中图分类号:U29 文献标识码:A 文章编码:1003-2738(2011)11-0022-01摘要:介绍现阶段BAS系统的结构和构成,探讨BAS系统的标准化设计、系统优化方法及系统评价方法,以摆脱其在发展过程中所面临的 技术问题,实现可持续发展。关键词:城市轨道交通;BAS系统;问题;发展一、引言 随着我国城市轨道交通的规模化、高速化发展,我国城市轨道交通系统迅速引入了基于计算机技术、自动控制技术和网络通信技术的各类自动化系统,大量采用国际先进水平的现代化机电设备,其中城市轨道交通环境与设备监控系统(BAS系统)就是其中之一,具有体系复杂、技术含量高、专业面广、设备维护困难的特点,并且需要根据业务需求不断地进行更新改造。我国发布的《GB 50157-2003地铁设计规范》中正式将该系统命名为“BAS,环境与设备监控系统”,并对其定义为:“是对地铁建筑物内的环境与空气条件、通风、给排水、照明、乘客导向、自动扶梯及电梯、屏蔽门、防淹门等建筑设备和系统进行集中监视、控制和管理的系统”。城市轨道交通BAS系统是一个典型的集成开放系统,是确保城市轨道交通系统安全、快捷、准点、有效地运行的关键工艺系统,是城市轨道交通中不可缺少的一个重要组成部分。 二、BAS系统现有的系统结构与构成 BAS系统从系统组成而言包括中心BAS系统、车辆段BAS系统和车站BAS系统,完整的BAS系统或完整的BAS功能系统是一个以骨干网为基础的、地理上分散的、分层分布式系统结构的大型SCADA系统,从逻辑上讲,硬件系统包括纵向3个层次。(一)中央级监控系统。主要位于OCC,由中央实时服务器、中央历史服务器、操作员工作站、工程师工作站、打印设备、网络设备、大屏幕或模拟显示设备等计算机及网络硬件构成,软件则包括操作系统、大型数据库、系统应用软件、应用软件开发与维护平台、网管软件其它辅助软件等。(二)车站级监控系统。车站级监控系统位于车站,以车站监控工作站、PLC控制为基础,具体包括车站监控局域网、打印机、后备操作盘等设备。(三)现场控制级设备。位于车站各就地监控点或数据采集点,具体包括各类传感器、执行器、远程I/O模块、接口模块或装置等。 BAS系统在横向呈现分布式的集散型结构,包括两个方面:各个车站的BAS系统因为车站沿城市轨道交通线路呈地理上分布式结构,因此整个BAS也是以车站BAS为单位的地理上分散的SCADA系统,另外在车站,根据设计规范的要求,车站BAS由多个控制器和统一的监控设备构成一个集散型系统(DCS)。(四)软件结构。软件结构包括数据结构层、数据处理层和人机接口层。管理和处理各种数据、接口控制以及提供信息显示和操作界面。(五)BAS系统的应用。 BAS系统的结构分为有中心功能的结构、无中心功能的结构和混合结构。有中心功能的BAS系统是一种完全独立的系统结构,较为传统和经典,目前建成或在建线路的 BAS 系统大多采用这种结构方式,如南京地铁 1号线,天津地铁,广州地铁2号线等;无中心功能的BAS系统是一种不完整的结构形式,这种结构形式的BAS是以车站为单位的一个个相对独立的系统,如广州地铁3号线,北京地铁5号线;混合式BAS系统既要在车站和综合监控系统接口,同时又要通过地铁骨干网形成一个较完整的BAS系统,如广州地铁4号线。 三、BAS系统在当前发展中所面临的问题城市轨道交通自动化程度将会越来越高,同样地,BAS系统将会更加复杂,监控的设备更多,系统集成的需求更大,技术含量更高,专业面更广,设备维护更加困难。目前,BAS系统存在以下问题:(1)系统与设备、设备与设备之间的控制集成成功率不高,相关系统结合“接口”界面如通信协议、网络构架的标准化、统一性不够;(2)运营管理水平跟不上,没有充分进行运行优化;(3)缺少正确有效的城市轨道交通BAS系统的评估方法,限制了城市轨道交通BAS系统研究更好地开展。 四、BAS系统的发展事物总是在矛盾中不断向前发展的。为了有效地解决城市轨道交通BAS系统在当前发展过程中存在的问题,BAS系统具有以下的发展趋势,从而实现BAS系统的可持续发展。(一)标准化设计。 BAS系统是一个对若干设备进行控制和监控管理、并基于“设备”、面向乘客服务的系统,其开放的集成系统构架,已经为构建城市轨道交通综合自动化系统奠定了基础,如果淡化专业系统概念,扩大BAS外延,即演变成一个综合自动化IAS系统,该系统相对于BAS系统而言,只是增加了多项专业功能和服务而已。因此,面向“设备”监控和管理的思路,基于开放的BAS集成系统构成,构建城市轨道交通综合自动化系统,已成为目前的发展趋势。集成监控平台的搭建也是BAS系统标准化设计的一个条件,监控平台应形态合理,提供强大的应用开发接口,数据组织和展现方式应符合城市轨道交通监控的习惯和特点,支持不同方式的硬件集成环境和软件配置形态,运用冗余、容错、自恢复等技术充分保证系统的稳定运行。 (二)系统优化。
地铁BAS系统网络介绍—工业以太网方式
地铁BAS系统网络构架介绍----工业以太网方式 ●BAS系统介绍: 地铁BAS系统对地铁各个车站及停车场、车辆段的暖通空调系统、给排水、低压配电与动力照明系统、电梯系统、车站事故照明电源等车站设备进行全面、有效地进行自动化监控及管理,确保设备处于安全、可靠、高效、节能的最佳运行状态,从而提供一个舒适的乘车环境,并能在火灾或阻塞等灾害状态下,更好地协调车站设备的运行,充分发挥各种设备应有的作用,保证乘客的安全和设备的正常运行。 关键词:BAS --- 环境与设备监控系统 FAS ---火灾自动报警系统 HMI ---人机界面 ISCS---综合监控系统 PLC ---可编程序控制器 UPS ---不间断电源 ZPLC--- 专用PLC:特指各区间的水泵房、风机, 线路外侧的冷冻站内设置的PLC。 维修工作站 --BAS 的车站级,作为BAS 的维修操作终端。 WINCC--- 西门子监控系统软件 IBP --- Integrated Backup Panel(综合后备盘) ●BAS系统站级网构架(2层网络) 第一层网络(工业太网络):系统根据车站建筑形式分为南端与北端BAS子系统。车站的环境与设备监控系统网分二层布置,第一层为站级系统网络,采用工业以太网,担负BAS与ISCS,南北端PLC 间、维修工作站同南北端PLC的数据交换。一般采用网管型工业交换机配置为冗余的双环以太网。 第二层网络(现场总线):第二层为现场设备级网络,采用专业工业现场总控冗余工业控制网,担负BAS控制器与BAS现场设备的数据交换。 网络构架图
注:BAS系统采用双网双设备冗余,但对站级工业以太网络需要接入设备并不多,主要是车站南北两端的PLC、站级维护工作站、ISCS FEP等。一般情况下,一个站6台左右2多模光口、6个电口网管型工业交换机可以满足需求。
霍尼韦尔智能家居系统解决方案-公开概要
霍尼韦尔智能家居系统HRIS-1000系列智能家居主 机 黄浦湾一期解决方案 目录 公司背景UUU ------------------------------------------------- 3 UUU 、 ------------------------------------------------ 4 UUU二、智能住宅UUU ------------------------------------------------ 5 UUU三、系统介绍UUU ------------------------------------------------ 6 UUU四、系统功能UUU ?系统整体介绍UUU (6 UUU1 .防盗报警UUU (6 UUU2
.灯光窗帘控制 :UUU (9 UUU3 .地板采暖控制 :UUU (10 UUU4 .空调控制 :UUU (11 UUU5 .远程视频监控 :UUU ........................................... 1U2 UUU6 ------------------------------------------ 13 UUU 五、主要产品说明 UUU 、控制面板 UUU (14 UUU1 、智能家居主机 UUU (15 UUU2 、智能控制模块 UUU (16 UUU3 ---------------------------------------------- 19 UUU 六、产品优势 UUU 、品牌的优势 :UUU (19 UUU1 、高度集成化的系统 UUU (19
BAS系统的内容及功能
BAS系统 地铁BAS系统: 2003年5月,国家质量监督检验检疫总局和建设部,联合发布了国家标准——《G B 50157-2003地铁设计规范》,标准中正式命名“环境与设备监控系统,Building Aut omation System(BAS)”,并对其定义为:“对地铁建筑物内的环境与空气条件、通风、给排水、照明、乘客导向、自动扶梯及电梯、屏蔽门、防淹门等建筑设备和系统进行集中监视、控制盒管理的系统”。 基本功能: 1.机电设备监控 具有中央和车站二级监控功能; BAS控制命令应能分别从中央工作站、车站工作站和车站紧急控制盘(IBP)人工发布或由程序自动判定执行,并具有越级控制功能,以及所需的各种控制手段; 对设备操作的优先级遵循人工高于自动的原则; 具备注册和权限设定功能。 2.执行防灾及阻塞模式功能 能接收FAS系统车站火灾信息,执行车站防烟、排烟模式; 能接收列车区间停车位置信号,根据列车火灾部位信息,执行隧道防排烟模式; 能接收列车区间阻塞信息,执行阻塞通风模式; 能监控车站逃生指示系统和应急照明系统; 能监视各排水泵房危险水位。 3.环境监控与节能运行管理功能 通过对环境参数的检测,对能耗进行统计分析,控制通风、空调设备优化运行,通过地铁整体环境的舒适度,降低能源消耗。 4.环境和设备管理功能 能对车站环境等参数进行统计; 能对设备的运行状况进行统计,据此优化设备的运行,实施维护管理趋势预告,提高设备管理效率。 地铁BAS监控内容: 正常运营模式的判定及转换; 消防排烟模式和列车阻塞模式的联动; 设备顺序启停; 风路和水路的联锁保护; 大功率设备启停的延时配合; 主、备设备运行时间平衡; 车站公共区和重要设备房的温度调节; 节能控制;
霍尼韦尔智能家居系统解决方案
霍尼韦尔智能家居系统山东地区总经销商山东鸣迅智能科技有限公司
目录 一、公司背景┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅2 二、智能住宅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅3 三、系统介绍┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅5 四、系统功能┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅6 1.系统整体介绍‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐6 2.防盗报警‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐6 3.灯光窗帘控制‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐9 4.地板采暖控制‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐10 5.空调控制‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐11 6.远程视频监控‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐12 五、主要产品说明┅┅┅┅┅┅┅┅┅┅┅┅┅┅13 1.控制面板‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐14 2.智能家居主机‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐15 3.智能控制模块‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐16 六、产品优势┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅19 1.品牌的优势‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐19 2.高度集成化的系统‐‐‐‐‐‐‐‐‐‐‐‐‐‐19 3.开放系统,国际标准的通讯协议‐‐‐‐‐‐‐‐20 4.稳定的产品质量‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐20 七、具体方案┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅20 八、案例介绍┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅20 九、售后服务承诺┅┅┅┅┅┅┅┅┅┅┅┅┅24 1.售后服务主导思想坚持质量第一,用户至上的精神维护本公司的声誉,确保工程项目及产品售后服务发挥其应有的效能‐24 2.售后服务范围‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐24 3.实施办法‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐24