用于铜矿矿区的手机室内导航最短路径算法研究
最短路径学年论文
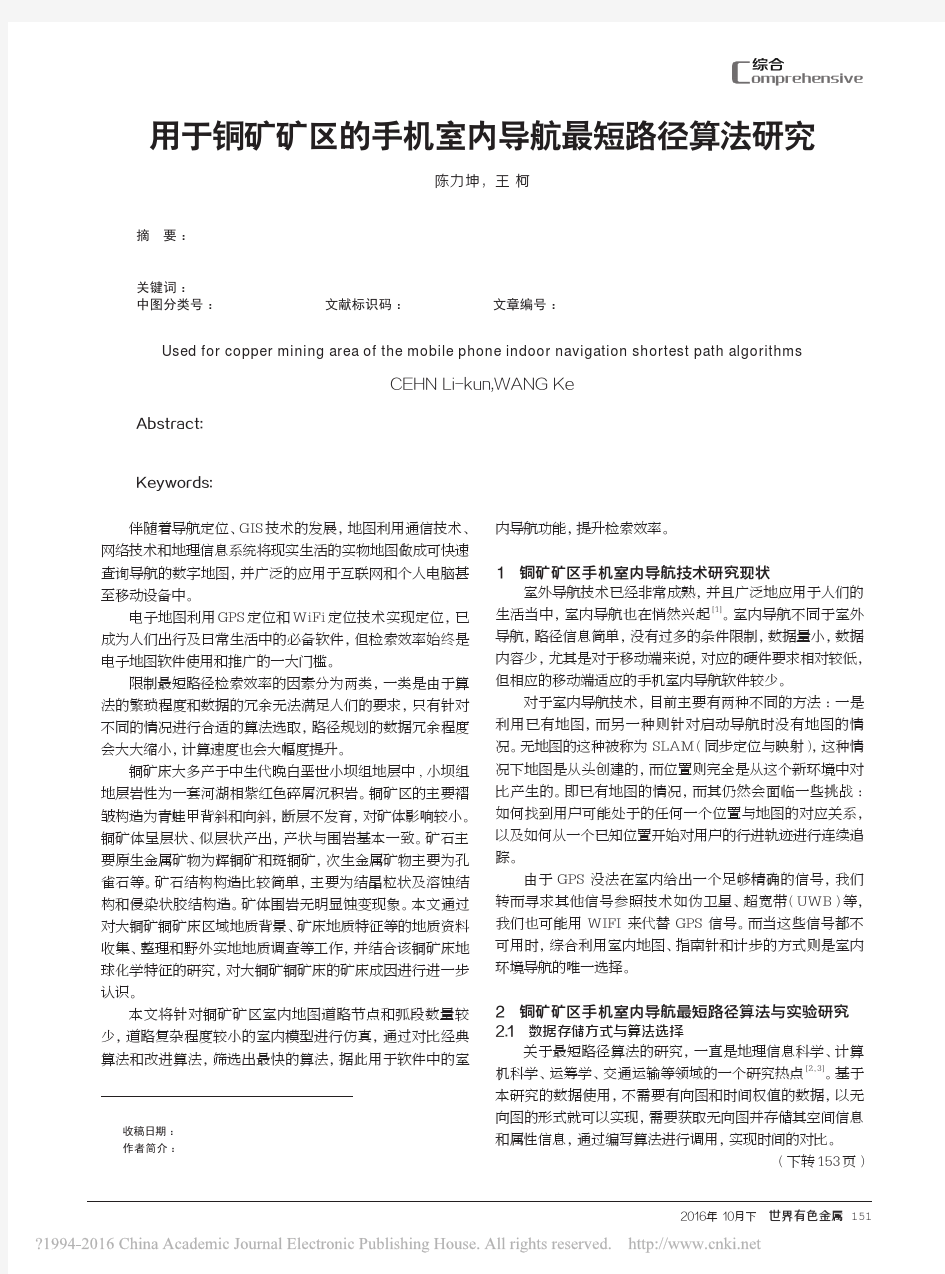
摘要:主要介绍最短路径问题中的经典算法——迪杰斯特拉(Dijkstra)算法和弗洛伊德(Floyd)算法,以及在实际生活中的运用。 关键字:Dijkstra算法、Floyd算法、赋权图、最优路径、Matlab 目录 摘要 (1) 1引言 (1) 2最短路 (2) 2.1 最短路的定义 (2) 2.2最短路问题常见算法 (2) 3 Dijkstra算法 (2) 3.1Dijkstra算法描述 (2) 3.2 Dijkstra算法举例 (3) 3.3算法的正确性和计算复杂性 (5) 3.3.1贪心选择性质 (5) 3.3.2最优子结构性质 (6) 3.3.3 计算复杂性 (7) 4 Floyd算法 (7) 4.1Floyd算法描述 (8) 4.2 Floyd算法步骤 (11) 4.3 Floyd算法举例 (11) 5 Dijkstra算法和Floyd算法在求最短路的异同 (11) 6 利用计算机程序模拟算法 (11) 7 附录 (11) 8 论文总结 (13) 9 参考文献 (13)
1 引言 最短路问题是图论理论的一个经典问题。寻找最短路径就是在指定网络中两结点间找一条距离最小的路。最短路不仅仅指一般地理意义上的距离最短,还可以引申到其它的度量,如时间、费用、线路容量等。 最短路径算法的选择与实现是通道路线设计的基础,最短路径算法是计算机科学与地理信息科学等领域的研究热点,很多网络相关问题均可纳入最短路径问题的范畴之中。经典的图论与不断发展完善的计算机数据结构及算法的有效结合使得新的最短路径算法不断涌现。 2 最短路 2.1 最短路的定义 对最短路问题的研究早在上个世纪60年代以前就卓有成效了,其中对赋权图 的有效算法是由荷兰著名计算机专家E.W.Dijkstra 在1959年首次提出的,该算法能够解决两指定点间的最短路,也可以求解图G 中一特定点到其它各顶点的最短路。后来海斯在Dijkstra 算法的基础之上提出了海斯算法。但这两种算法都不能解决含有负权的图的最短路问题。因此由Ford 提出了Ford 算法,它能有效地解决含有负权的最短路问题。但在现实生活中,我们所遇到的问题大都不含负权,所以我们在的() 0ij w ≥的情况下选择Dijkstra 算法。 定义1若图G=G(V,E)中各边e 都赋有一个实数W(e),称为边e 的权,则称这种图为赋权图,记为G=G(V,E,W)。 定义2若图G=G(V,E)是赋权图且()0W e ≥,()e E G ∈,假设[i,j] 的权记为()i j W ,,若i 与j 之间没有边相连接,那么()i j =W ∞,。路径P 的定义为路径中各边的长度之和,记W (P )。图G 的结点u 到结点v 距离记为d(u,v),则u 、v 间的最短路径可定义为 { ()min P 0d(u,v)=,u v W =∞(),不可达时 。 2.2 最短路问题常见算法 在求解网络图上节点间最短路径的方法中,目前国内外一致公认的较好算法有迪杰斯特拉(Dijkstra)及弗罗伊德(Floyd)算法。这两种算法中,网络被抽象为一个图论中定义的有向或无向图,并利用图的节点邻接矩阵记录点间的关联信息。在进行图的遍历以搜索最短路径时,以该矩阵为基础不断进行目标值的最小性判别,直到获得最后的优化路径。 Dijkstra 算法是图论中确定最短路的基本方法,也是其它算法的基础。为了求出赋权图中任意两结点之间的最短路径,通常采用两种方法。一种方法是每次以一个结点为源点,重复执行Dijkstra 算法n 次。另一种方法是由Floyd 于1962年提出的Floyd 算法,其时间复杂度为 ()3O n ,虽然与重复执行Dijkstra 算法n 次的时间复杂度相同,但其形式上略为简单,且实际运 算效果要好于前者。 3 Dijkstra 算法 3.1 Dijkstra 算法描述
最短路径算法—dijkstra总结
最短路径算法—D i j k s t r a 总结 -标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
Dijkstra 算法解释 本文引用三篇文章:分别是谢光新-Dijkstra 算法, zx770424 -Dijkstra 算法, 中华儿女英雄 -Dijkstra 算法 有兴趣的朋友请引用原文,由于分类很不相同难以查找,此处仅作汇总。 谢光新的文章浅显易懂,无需深入的数学功力,每一步都有图示,很适合初学者了解。 zx770424将每一步过程,都用图示方式和公式代码\伪代码对应也有助于,代码的理解。 中华儿女英雄从大面上总结了Dijkstra 的思想,并将演路图描叙出来了。起到总结的效果。 希望这篇汇总有助于大家对Dijkstra 算法的理解。
Dijkstra算法是典型最短路算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。 简介 Dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法是很有代表性的最短路径算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。Dijkstra一般的表述通常有两种方式,一种用永久和临时标号方式,一种是用OPEN, CLOSE表的方式,这里均采用永久和临时标号的方式。注意该算法要求图中不存在负权边。 算法描述 (这里描述的是从节点1开始到各点的dijkstra算法,其中Wa->b表示a->b的边的权值,d(i)即为最短路径值) 1.置集合S={2,3,...n}, 数组d(1)=0, d(i)=W1->i(1,i之间存在边) or +无穷大(1.i之间不存在边) 2.在S中,令d(j)=min{d(i),i属于S},令S=S-{j},若S为空集则算法结束,否则转3 3.对全部i属于S,如果存在边j->i,那么置d(i)=min{d(i), d(j)+Wj->i},转2 Dijkstra算法思想为:设G=(V,E)是一个带权有向图,把图中顶点集合V分成两组,第一组为已求出最短路径的顶点集合(用S表示,初始时S中只有一个源点,以后每求得一条最短路径 , 就将加入到集合S中,直到全部顶点都加入到S中,算法就结束了),第二组为其余未确定最短路径的顶点集合(用U表示),按最短路径长度的递增次序依次把第二组的顶点加入S中。在加入的过程中,总保持从源点v到S中各顶点的最短路径长度不大于从源点v到U中任何顶点的最短路径长度。此外,每个顶点对应一个距离,S中的顶点的距离就是从v到此顶点的最短路径长度,U中的顶点的距离,是从v到此顶点只包括S中的顶点为中间顶点的当前最短路径长度。 算法具体步骤 (1)初始时,S只包含源点,即S=,v的距离为0。U包含除v外的其他顶点,U中顶点u距离为边上的权(若v与u有边)或)(若u不是v的出边邻接点)。 (2)从U中选取一个距离v最小的顶点k,把k,加入S中(该选定的距离就是v到k的最短路径长度)。 (3)以k为新考虑的中间点,修改U中各顶点的距离;若从源点v到顶点u(u U)的距离(经过顶点k)比原来距离(不经过顶点k)短,则修改顶点u的距离值,修改后的距离值的顶点k 的距离加上边上的权。 (4)重复步骤(2)和(3)直到所有顶点都包含在S中。 复杂度分析 Dijkstra 算法的时间复杂度为O(n^2) 空间复杂度取决于存储方式,邻接矩阵为O(n^2)
室内定位常用算法概述
室内定位常用算法概述 一.室内定位目的和意义 随着数据业务和多媒体业务的快速增加,人们对定位与导航的需求日益增大,尤其在复杂的室内环境,如机场大厅、展厅、仓库、超市、图书馆、地下停车场、矿井等环境中,常常需要确定移动终端或其持有者、设施与物品在室内的位置信息。但是受定位时间、定位精度以及复杂室内环境等条件的限制,比较完善的定位技术目前还无法很好地利用。因此,专家学者提出了许多室内定位技术解决方案,如A-GPS定位技术、超声波定位技术、蓝牙技术、红外线技术、射频识别技术、超宽带技术、无线局域网络、光跟踪定位技术,以及图像分析、信标定位、计算机视觉定位技术等等。这些室内定位技术从总体上可归纳为几类,即GNSS 技术(如伪卫星等),无线定位技术(无线通信信号、射频无线标签、超声波、光跟踪、无线传感器定位技术等),其它定位技术(计算机视觉、航位推算等),以及GNSS和无线定位组合的定位技术(A-GPS或A-GNSS)。 由于在室内环境下对于不同的建筑物而言,室内布置,材料结构,建筑物尺度的不同导致了信号的路径损耗很大,与此同时,建筑物的内在结构会引起信号的反射,绕射,折射和散射,形成多径现象,使得接收信号的幅度,相位和到达时间发生变化,造成信号的损失,定位的难度大。虽然室内定位是定位技术的一种,和室外的无线定位技术相比有一定的共性,但是室内环境的复杂性和对定位精度和安全性的特殊要求,使得室内无线定位技术有着不同于普通定位系统的鲜明特点,而且这些特点是户外定位技术所不具备的。因此,两者区域的标识和划分标准是不同的。基于室内定位的诸多特点,室内定位技术和定位算法已成为各国科技工作者研究的热点。如何提高定位精度仍将是今后研究的重点。 二. 室内定位技术的国内外发展趋势 室内GPS定位技术 GPS是目前应用最为广泛的定位技术。当GPS接收机在室内工作时,由于信号受建筑物的影响而大大衰减,定位精度也很低,要想达到室外一样直接从卫星广播中提取导航数据和时
公交最优路径选择的数学模型及算法_雷一鸣
第17卷第2期 湖南城市学院学报(自然科学版)V ol.17 No.2 2008年6月 Journal of Hunan City University (Natural Science) Jun. 2008 公交最优路径选择的数学模型及算法 雷一鸣 (广东工业大学华立学院,广州 511325) 摘要:在公交出行查询系统中,最关键的部分是寻找两站点间乘车的出行最优路径问题.建立了以最小换乘次数为第一目标,最小途经站点为第二目标的公交出行最优路径模型.同时,设计了一种算法以确定最优公交线路序列,分析了线路相交的几种情况,给出了换乘点选择方法. 关键词:最优路径;换乘次数;公交网络 中图分类号:O232文献标识码:A文章编号:1672–7304(2008)02–0050–03 公交最优路径问题一直是应用数学、运筹学、计算机科学等学科的一个研究热点.对公交最优路径问题的理论研究主要包括公交网络的数学描述和设计最优路径算法.在公交网络描述方面,Anez等用对偶图描述能够涵盖公交线路的交通网络,Choi等讨论了利用GIS技术从街道的地理数据产生公交线路和站点的问题;在设计最优算法方面,常用的算法[1]有Dijkstra算法、Floyd 算法、Moore-pape算法等.Moore-pape算法计算速度较快,适用于大型网络,但它无法进行“一对一”的计算.Floyd算法虽然可以快速地进行“多对多”的计算,但它不能应用于大型网络,而Dijkstra算法是目前公认的最好的算法,但它数据结构复杂、算法时间长,不适合公交线路的查询.本文首先对公交网络进行了数学描述,考虑到公交乘客出行时所面临的各种重要因素,包括换乘次数、途径站点、出行耗时和出行费用等,选择以换乘次数最少作为最优路径算法的第一约束目标,而出行耗时虽难以准确测算但它与途径站点数相关,所以选择易于量化的途经站点数最少作为第二约束目标,建立公交乘车数学模型,设计相应的算法,并利用有关实验数据验证了它的有效性和可行性. 1 模型的建立及其算法 1.1 模型假设及符号规定 为了更好地建立数学模型,首先对公交网络及出行者作出以下假设[2]: 1)不考虑高峰期、道路交通堵塞等外界因素对乘车耗时的影响. 2)假设出行者熟悉公交站点及附近地理位置,并且知道可乘的各种公汽和地铁以及到达目的地有哪几种不同选择的机会.在公交线路网中, 不同的公交线路在行程上一定会有重叠,也就是说不同的线路上一定会有同名站点.在进行网络分析时,把空间上相近的异线同名站点合理抽象成一个节点. 3)假设出行者对公汽和地铁的偏好程度不一样.在不换乘的情况下,宁愿乘地铁,以求舒适;在路途较近的情况下,宁愿坐公汽而放弃乘地铁.出行者可根据自己的偏好结合自己的出行需求(换乘次数、最短路程、费用等),可在各种出行方案中选出满足自己出行需求的乘车方案.设() L I为经过点A或其附近的公交线路集,其中1,2,..., I m =;() S J为经过点B或其附近的公交线路集,其中,,..., J12n =;(,) E I U为线路 ) (I L上的站点,其中,,..., U12p =;(,) F J V为线路) (J S上的站点,其中,,..., V12q =;() X K为经过站点) ,(U I E的线路,其中,,..., K12w =;() Y O 为经过站点) , (V J F的线路,其中,,..., O12v =;(,) d E F M ≤表示从站点E步行到站点F之间的距离不超过乘客换车时步行的最大心理承受值M,其中M表示乘客在换车时步行的最大心理承受值.通常,M与公交站点间的平均距离呈线性正相关. Ai Z表示站点A的下行第i个站点; Bj Z表示站点B的上行第j个站点;另外,公交的可行线 路的集合可表示为:{| i i TR TR TR == 0112,1 ,,,,,, i i i i d a p a p a ? < ,} id d p a>,其中,{} 01,1 ,,,, i i d d a a a a ? 为站点集合,{} 12,1 ,,,, i i i d d p p p p ? 为公交车次的集合, i TR 收稿日期:2008-03-10 作者简介:雷一鸣(1972-),男,湖南临武人,助教,硕士,主要从事数学模型及经济信息管理研究.
基于高精地图的导航算法模型
基于高精地图的导航算法模型 传统的导航电子地图因交通路网在微观层面表现粒度不细, 在满足先进的汽车辅助驾驶系统(ADAS),乃至无人驾驶汽 车需求方面常显不足,为了增加驾驶辅助系统或者自动驾驶的可 靠性,可以将静态交通信息例如道路线、交通灯等信息提前采集 存储在电子地图中,同时根据城市周期性的变化更新电子地图, 以便在行驶过程中通过地图数据库就能够获取周边环境的详尽信息。汽车智能驾驶系统有两大关键技术,车辆定位和车辆控制技术。车辆定位和控制在很大程度上依赖于精确的导航电子地图。 这就对地图提出了新的要求,不仅需要分辨率高,还需要信息详细。本文提出的高精细地图,主要是指分辨率达到亚米级的道路 级地图,而高精度导航地图能否有效发挥其功能取决于路网数据 模型的准确性。因此下文将会对道路级网络模型以及路径规划引 导两方面进行详细阐述,同时也会对其应用进行说明。 一、道路交通网络 道路(Lane)作为车辆行驶过程中所占道路的最小单元,以道路作为基本单元,顾及道路的属性、拓扑语义关系及与道路 的连接关系是本文研究的基本出发点。 建立道路级交通网络就是将物理上的实际道路网络抽象为可 借助卫星定位手段,进行导航控制的道路级交通网络,下面将从
数据规格设计以及模型路口处理两个方面对道路交通网络模型进 行说明。 (一)基础数据规格定义 道路功能划分包括各流向道路数和各流向道路位置的划分, 也包括每条道路的宽度设计、分隔线性质设计、允许的车种、行 驶的速度、限行的时间等交通规则的制定。因此在进行规格设计 的时候需要考虑到与道路相关的所有属性。 1.道路与道路连接关系 道路级交通网络是由道路中心线网络和行道路路网络组成, 每条道路直接隶属于一条行道路路,多条平行的道路组成一条行 道路路。因此道路与行道路路的关系是多对一的关系,可在道路 的属性中给出其所属的行道路路的ID号,而行道路路的属性中,则给出其下属的各条道路的ID号集合以及道路数,如表1、表 2所示。
最短路径流程图及算法详解
:算法的设计思想 本算法采用分支定界算法实现。构造解空间树为:第一个城市为根结点,与第一个城市相邻的城市为根节点的第一层子节点,依此类推;每个父节点的子节点均是和它相邻的城市;并且从第一个根节点到当前节点的路径上不能出现重复的城市。 本算法将具有最佳路线下界的节点作为最有希望的节点来展开解空间树,用优先队列实现。算法的流程如下:从第一个城市出发,找出和它相邻的所有城市,计算它们的路线下界和费用,若路线下界或费用不满足要求,将该节点代表的子树剪去,否则将它们保存到优先队列中,并选择具有最短路线下界的节点作为最有希望的节点,并保证路径上没有回路。当找到一个可行解时,就和以前的可行解比较,选择一个较小的解作为当前的较优解,当优先队列为空时,当前的较优解就是最优解。算法中首先用Dijkstra算法算出所有点到代表乙城市的点的最短距离。算法采用的下界一个是关于路径长度的下界,它的值为从甲城市到当前城市的路线的长度与用Dijkstra算法算出的当前城市到乙城市的最短路线长度的和;另一个是总耗费要小于1500。 伪代码 算法AlgBB() 读文件m1和m2中的数据到矩阵length和cost中 Dijkstra(length) Dijkstra(cost) while true do for i←1 to 50 do //选择和node节点相邻的城市节点 if shortestlength>optimal or mincost>1500 pruning else if i=50 optimal=min(optimal,tmpopt)//选当前可行解和最优解的 较小值做最优解 else if looped //如果出现回路 pruning //剪枝 else 将城市i插入到优先队列中 end for while true do if 优先队列为空 输出结果 else 取优先队列中的最小节点 if 这个最小节点node的路径下界大于当前的较优解 continue
基于RSSI的室内定位算法研究
基于RSSI的室内定位算法研究 摘要:近年来,随着无线网络的迅速发展,室内定位技术在诸多领域中得到了广泛应用,成为重要的研究对象之一。室内定位技术的核心要素是定位算法。优秀的定位算法,可以有效地降低无线信道的影响,并利用较少的网络资源获取较高的定位精度。论文在研究了基于RSSI测距的无线定位算法后,重点研究了基于泰勒级数展开的RSSI测距定位算法,针对传统算法的缺点提出了改进方案。 关键词:室内定位 RSSI 泰勒级数 1.引言 现代社会,基于信息技术的发展,导航、定位等信息在人们纷繁庞杂的信息要求中,占据了越来越大的比重。比如航海、军事、智能公交、煤矿等领域均要求室外或者室内导航定位技术。进入二十一世纪以来,由于传统局域网己经不能满足人们的需求,加上无线网络的组网成本大幅下降,无线网络呈现出蓬勃发展的趋势,而人们在使用的同时也越来越不满足于现状,开始对其有了更多更深层次的要求。 目前,世界上正在运行的卫星导航定位系统主要是美国的全球定位系统(Global Positioning System GPS) ,但GPS这种定位方法是在室外使用得较多的定位方法,它不适用于室内。针对GPS的室内定位精确度偏低、成本较高等缺点,具备低成本、较高定位精度的诸多室内定位技术便应运而生,并在诸多领域正越来越发挥着重要的作用。例如:煤矿企业要实现对井下作业人员的实时跟踪与定位、方便企业对员工的管理与调度,要用到室内定位技术,营救被困人员,室内定位技术可以提供被困人员位置信息,为营救节省大量的时间;在超市等购物中心,室内定位技术可以实现对商品定位、消费者定位、广告发布、地图导航等功能。所以若能实现低成本且高精度的室内定位系统,具有非常重要的现实意义。 未来的发展趋势是室内定位技术与卫星导航技术和通信技术有机结合,发挥各项技术自身的优点,不仅可以提供较高的定位精度和响应速度,还可以覆盖较广的范围,真正实现无缝的、精确的定位。 2 室内定位方法简介 所谓室内定位技术是指在室内环境下确定某一时刻接收终端在某种参考系中的位置。在室内环境下,大多采用无线局域网来估计接收终端的位置。一般典型的无线局域网架构中接入点(AP,Acess Point)类似于无线通信网络中的基站,大部分无线局域网都使用RF(Radio Frequency)射频信号来进行通信,因为无线电波可穿越大部分的室内墙壁或其它障碍物,已提供更大的覆盖范围。常见的室内定位方法有: (1) ZigBee定位技术ZigBee是一种新兴的短距离、低速率、低功耗、低成本及网络扩展性强的无线网络技术,它的信号传播距离介于射频识别和蓝牙之间,工作频段有三个——2.4GHz (ISM国际免费频段)和858/91 SMHz,除了可以应用于室内定位,还可以应用于智能
路径优化的算法
摘要 供货小车的路径优化是企业降低成本,提高经济效益的有效手段,供货小车路径优化问题可以看成是一类车辆路径优化问题。 本文对供货小车路径优化问题进行研究,提出了一种解决带单行道约束的车辆路径优化问题的方法。首先,建立了供货小车路径优化问题的数学模型,介绍了图论中最短路径的算法—Floyd算法,并考虑单行道的约束,利用该算法求得任意两点间最短距离以及到达路径,从而将问题转化为TSP问题,利用遗传算法得到带单行道约束下的优化送货路线,并且以柳州市某区域道路为实验,然后仿真,结果表明该方法能得到较好的优化效果。最后对基本遗传算法采用优先策略进行改进,再对同一个供货小车路径网进行实验仿真,分析仿真结果,表明改进遗传算法比基本遗传算法能比较快地得到令人满意的优化效果。 关键字:路径优化遗传算法 Floyd算法
Abstract The Path Optimization of Goods Supply Car is the effective way to reduce business costs and enhance economic efficiency.The problem of the Path Optimization of Goods Supply Car can be seen as Vehicle routing proble. This paper presents a solution to Vehicle routing proble with Single direction road by Researching the Way of Path Optimization of Goods Supply Car. First, This paper Establish the mathematics model of Vehicle routing proble and introduced the shortest path algorithm-Floyd algorithm, then taking the Single direction road into account at the same time. Seeking the shortest distance between any two points and landing path by this algorithm,then turn this problem in to TSP. Solving this problem can get the Optimize delivery routes which with Single direction road by GA,then take some district in the state City of LiuZhou road as an example start experiment.The Imitate the true result showed that this method can be better optimize results. Finally improving the basic GA with a priority strategy,then proceed to imitate the true experiment to the same Path diagram. The result expresses the improvement the heredity calculate way ratio the basic heredity calculate way can get quickly give satisfaction of excellent turn the result. Keyword: Path Optimization genetic algorithm Floyd algorithm
导航中道路匹配算法的设计与实现(第一次)
导航中道路匹配算法的设计与实现(第一次) 首先,道路匹配(地图匹配)的定义是:在不同条件下获取的同一物景的地图之间的配准,同一传感器在不同时间,或不同类型传感器在同一时间,或不同类型传感器在不同时间所获取的两幅地图中的同一地面点所对应像素之间的配准。 其作用我们小组经过网上的查找认为有3个要点:使空间数据实现更加有效的融合,实现地图的变化检测和自动更新,实现空间数据的质量评估和位置校正。 地图匹配是一种基于软件技术的定位修正方法,其基本思想是将车辆定位轨迹与数字地图中的道路网信息联系起来,并由此相对于地图确定车辆的位置。地图匹配应用是基于以下2个假设条件:(1)车辆总是行驶在道路上;(2)采用的道路数据精度要高于车载定位导航系统的定位精度。当上述条件满足时,就可以把定位数据和车辆运行轨迹同数字化地图所提供的道路位置信息相比较,通过适当的匹配过程确定出车辆最可能的行驶路段以及车辆在该路段中的最大可能位置。如果上述假设不成立,则地图匹配将产生错误的位置输出,并可能导致系统性能的严重下降。一般认为用于匹配的数字地图误差不应超过巧米(真实地面距离)。由于陆地车辆在除进入停车场等之外的绝大多数时间内都位于公路网络中,因此使用地图匹配技术的条件是满足的。 地图匹配的算法是曲线匹配原理和地理空间接近性分析方法的融合。曲线匹配算法的基本思想是:如果对一条曲线做任意数量、任意比例的分割,分割点都落在另一条曲线上,则两条曲线严格匹配。实际应用中,就是计算一条曲线上相对均匀的某一数量分割点到参考曲线的距离的平均值,将其作为到参考曲线的平均距离,并将此平均距离的倒数作为匹配优劣的度量。空间接近性分析方法就是
前N条最短路径问题的算法及应用
第36卷第5期2002年9月 浙 江 大 学 学 报(工学版) Jo ur nal o f Zhejiang U niv ersity(Eng ineer ing Science) Vol.36No.5Sep.2002 收稿日期:2001-10-24. 作者简介:柴登峰(1974-),男,浙江江山人,博士生,从事遥感图像处理、地理信息系统方面研究.E-mail:chaidf@z https://www.360docs.net/doc/0218291928.html, 前N 条最短路径问题的算法及应用 柴登峰,张登荣 (浙江大学空间信息技术研究所,杭州浙江310027) 摘 要:现有最短路径问题指的是狭义最短路径问题,针对该问题而设计的算法只能求得最短的一条路径.前N 条最短路径拓宽了最短路径问题的内涵(即不仅要求得最短路径,还要求得次短、再次短…第N 短路径),是广义最短路径问题.在图论理论基础上分析问题之后,设计了一个递归调用Dijkstr a 算法的新算法,该算法可以求取前N 条最短路径,而且时间、空间复杂度都为多项式阶.该算法已经成功应用于一个交通咨询系统中,自然满足实时应用需要. 关键词:最短路径;N 条最短路径;网络分析;地理信息系统;交通咨询系统 中图分类号:P 208;O 22 文献标识码:A 文章编号:1008-973X (2002)05-0531-04 Algorithm and its application to N shortest paths problem CHAI Deng-f eng,ZHAN G Deng-rong (I nstitute of Sp ace and I n f ormation T echnical ,Zhej iang U niv er sity ,H angz hou 310027,China ) Abstract :As the shor test path denotes one path ,algorithms designed for shor test path problem can g et only one path .N shortest paths are N paths including the shortest one ,the one inferior to the shortest one,eto.After reviewing the application of shortest poth pro blem ,an N shortest paths problem w as put fo rw ard and described.Gr aph theo ry w as used to analy ze the problem and results in fo ur theoretical con-clusions .T hen ,algo rithm recursively calling the Dijkstra algor ithm was desig ned and analy zed .Bath time co nplexity and space conplex ity are poly nom ial order.The algo rithm w as tested by ex periment and applied to a traffic consultatio n system of Guang zhou City ,it can meet the need of r eal-time application.Key words :sho rtest path;N shor test paths;netw ork analysis;tr affic consultation system ;GIS 20世纪中后期,随着计算机的出现和发展,图论的理论和应用研究得到广泛重视,图论作为一个数学分支的地位真正得到了确立.现在,图论的应用已经深入到众多领域,GIS 网络分析就是图论在地理信息领域的重要应用[3] ,此外,还有城市规划、电子导航、交通咨询等等. 最短路径问题是图论中的一个典范问题[1],主要研究成果有Dijkstra 、Floy d 等优秀算法[1,2],Dijk-stra 还被认为是图论中的好算法[1] .目前的研究工作主要集中于算法实现的优化改进与应用方面[3,4].最短路径问题通常有两类[2]:一类是求取从某一源点到其余各点的最短路径;另一类是求取每一对顶 点之间的最短路径.它们从不同的角度描述问题,但有一个共同的缺陷:这里的最短路径指两点之间最 短的那一条路径,不包括次短、再次短等等路径.在此不妨称以上两类问题为狭义最短路径问题,为此设计的算法只能求得最短的一条路径,而不能得到次短、再次短等等路径. 实际上,用户在使用咨询系统或决策支持系统时,希望得到最优的决策参考外,还希望得到次优、再次优等决策参考,这同样反映在最短路径问题上.因此,有必要将最短路径问题予以扩充,成为N 条最短路径问题,即不但要求得到最短路径,还要得到次短、再次短等路径.这称之为广义最短路径问题.
无线传感网大空间定位测量算法及精度评估
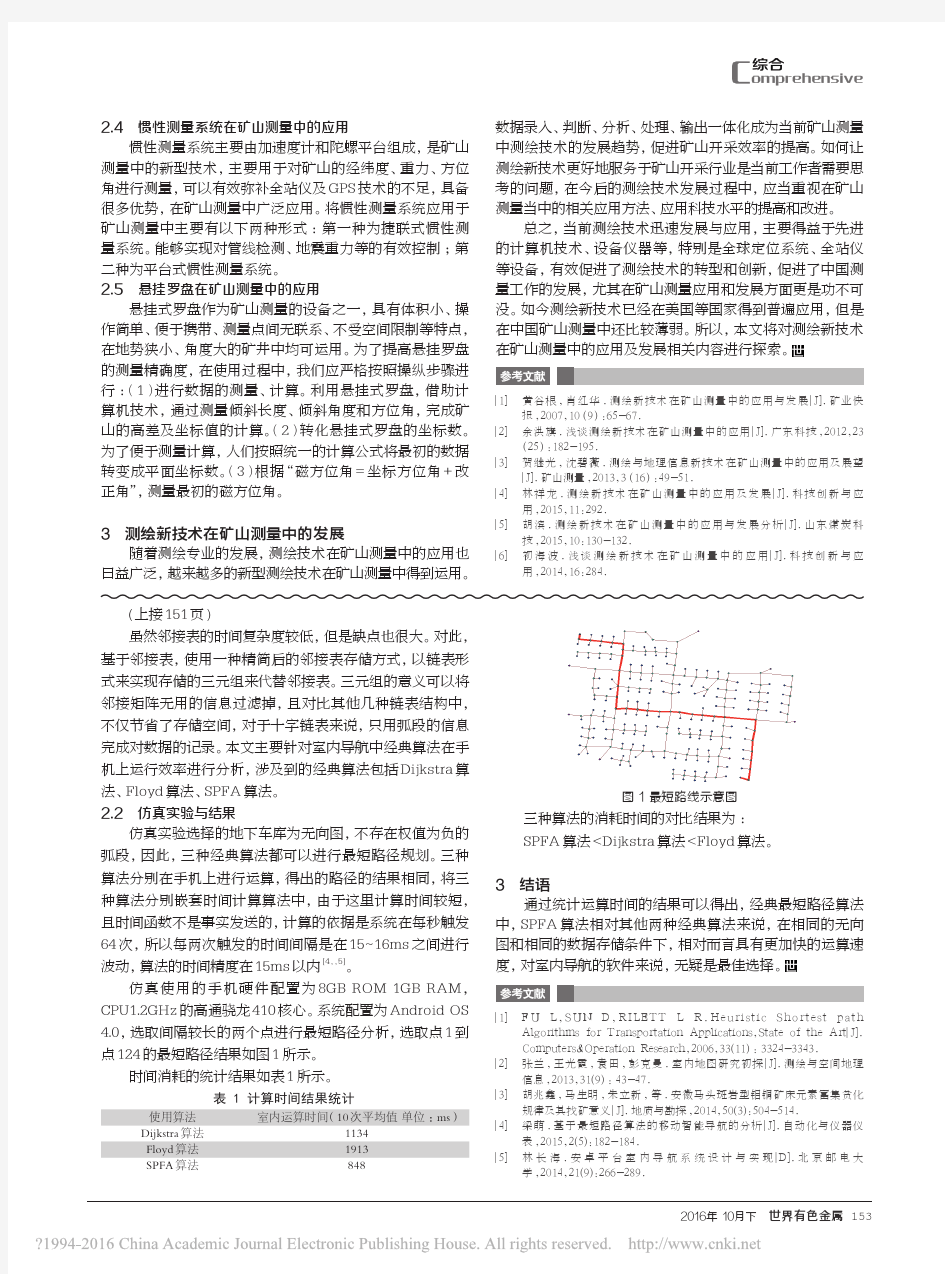
第37卷?第4期?2015-04(上)? 【71】 无线传感网大空间定位测量算法及精度评估 Positioning measurement algorithm and accuracy evaluation for wireless sensor networks in large field working space 刘文文,王俊岭,杨 瑛 LIU Wen-wen, WANG Jun-ling, YANG Ying (合肥工业大学,合肥 230009) 摘 要:无线传感网结构参数对移动节点定位精度有重要影响。面对基于无线传感网大空间定位测量过程 中的共性问题:测量距离约束和信号覆盖范围约束,提出了一种选择性大空间定位算法。面对移动节点特定的定位空间要求以及定位精度要求,采用蒙特卡罗方法研究了测距误差、信标网络参数配置对移动节点定位精度以及可定位空间的作用关系,提出的仿真算法模式对于设计评估满足一定精度要求的无线传感网络可定位空间探索具有一定的指导意义。 关键词:无线传感网络;大空间定位算法;精度评估中图分类号:TP702 文献标识码:A 文章编号:1009-0134(2015)04(上)-0071-04Doi:10.3969/j.issn.1009-0134.2015.04(上).22 收稿日期:2014-07-10 基金项目:国家自然科学基金资助:基于无线传感网络引导的高精度超大空间坐标测量网络构建关键技术(51275149)作者简介:刘文文(1961 -),女,副教授,博士,主要从事仪器设计、光学检测系统设计、现代控制理论和测控软件 开发领域的研发工作。 0 引言 无线传感网络的很多应用都涉及距离位置信息,基于无线传感网络的大空间定位技术也因此成为这一研究热点的关键基础技术。无线传感网络定位技术有基于非测距定位技术和基于测距定位技术,基于测距的定位技术分为基于信号接收强度指示值测量(RSSI )方法、基于到达时间测量(TOA )方法以及基于时间差测量(TDOA )等方法等。本文对基于时间差的测量方法(TDOA )进行分析研究和仿真,面对距离测量精度和范围的限制,寻找高精度的定位算法,面向无线传感网络结构参数通过仿真评估大空间定位精度。研究对设计满足一定定位精度的无线传感网络具有指导意义。 1 原理分析及算法 基于距离测量的大空间定位方法通过测量移动节点到信标节点的距离实现移动节点的空间定位,高精度定位的关键点在于高精度的距离测量方法及高精度的定位算法。 假设在移动节点P(x,y,z)周围有n 个位置已知的信标节点G 1(x 1,y 1,z 1),G 2(x 2,y 2,z 2),…, G n (x n ,y n ,z n )参与测量,如图1所示,它们与移动节点的距离的测量值为D 1,D 2,…,D n ,而理论距离为: 1,2,,j d j n == (1) 以测量距离与其理论值的残余误差平方和最小为原则定位移动节点P(x,y,z),则测量模型为: ∑=?n j j j d D Min 12 )( (2) 这是一个无约束非线性优化问题,理论上可以用非线性无约束优化方法求解[1]。在此,笔者提出一种线性迭代算法求解该非线性优化问题。 G2 G4 D2 ????3 ????* D1 D1 G1 D4 D3 G3 图1 移动节点与信标节点
最优路径算法
解决方案一: Dijkstra算法(单源最短路径) 单源最短路径问题,即在图中求出给定顶点到其它任一顶点的最短路径。在弄清楚如何求算单源最短路径问题之前,必须弄清楚最短路径的最优子结构性质。 一.最短路径的最优子结构性质 该性质描述为:如果P(i,j)={Vi....Vk..Vs...Vj}是从顶点i到j的最短路径,k和s是这条路径上的一个中间顶点,那么P(k,s)必定是从k到s的最短路径。下面证明该性质的正确性。 假设P(i,j)={Vi....Vk..Vs...Vj}是从顶点i到j的最短路径,则有 P(i,j)=P(i,k)+P(k,s)+P(s,j)。而P(k,s)不是从k到s的最短距离,那么必定存在另一条从k到s的最短路径P'(k,s),那么P'(i,j)=P(i,k)+P'(k,s)+P(s,j)
路径跟踪
1.首先研究路径跟踪(参考机器人一些算法如:基于广义预测控制器的移动机器人路径控 制算法、基于模糊逻辑推理的移动机器人导航控制算法、基于模糊神经网络的机器人导航控制算法等)思路一:(1)首先建立车辆按照预定路径行驶的控制系统模型(包括控制理论的选择、控制模型的数学推导和实现、控制模型的优化和总体方案实现)(2)利用SIMULINK建模仿真(包括:控制模型的仿真建模、作业环境的仿真建模、控制算法的程序实现)(3)按照要求设计各类仿真试验,并对控制模型进行仿真试验,依据试验结果进行完善调整直到仿真曲线满意为止(4)试验研究阶段(包括建立平台调试然后将调整后的控制算法移植到试验系统的控制算法程序中去,通过被控车辆的运动轨迹对该模型进行实物试验并依据结果对模型再进行调整直到结果满意为止)(5)分析结果总结。(以上参考中南大学硕士论文深海集矿机的路径跟踪) 2.路径跟踪中的误差如何消除?(在笛卡尔坐标空间中,采用误差矢量作为系统的反馈来 快速消除跟踪误差。参考南理工硕士论文——智能车辆体系结果及路径跟踪策略的研究) 3.路径跟踪中的运动控制(分开环和闭环)开环策略就是试图寻找一个有界的控制输入序 列来操纵系统使其从一个初始位形到任意的期望位形。考虑非完整约束的智能车辆系统,是一个欠驱动的非完整系统,也是一个无漂移的零动力学系统。此类系统不能用连续可微的时不变的纯状态反馈率来予以镇定。因此,不连续控制、事变控制以及它们的混合策略就是必然的选择。所以为其设计一个反馈控制规律,是目前非常活跃的研究领域。 4.由于高速公路的道路曲率变化较为缓慢,利用圆弧与直线的组合拟合目标路径。(1)利用车载传感器测量时刻的三对道路预瞄点的坐标信息,根据所预测算法获得(K+1)T时刻道路预瞄点处坐标。(2)根据最优控制理论,设计最优反馈控制器。(3)最后仿真结果表明:基于所提路径预测法,最优反馈控制器能确保自主车实现跟踪性能。(参考论文——基于路径预测的自主车最优跟踪控制)。 5.采用模糊控制方法实现对机器人速度的控制(输入时航向角偏差和路径的曲率;输出为移动机器人的期望速度大小) 6.路径跟踪不同于轨迹跟踪,它对时间没有苛刻的要求,只需要在一定误差范围内跟踪期望路径(path following)(1)建立纯追踪模型(包括了算法的推导、轨迹的确定)(2)模糊控制器对前视距离的调节。前视距离太大太小都不好,应该根据情况选择合适的。其跟车速大小有直接的关系车速大时要求较大的前视距离,而车速较慢时需要较小的前视距离。横向误差是车辆纵轴与期望路径的夹角。路径跟踪的根本目的是使航向偏角和横向误差都趋于0。将航向偏角和车速作为模糊控制器的二个输入,前视距离作为输出。(3)MATLAB仿真及结果分析(包括直线路径、折线路径的跟踪仿真)(4)最后得到结论。 7.(1)建立运动学模型并分析该模型确定控制方法和控制策略(2)利用自动控制原理建立运动的控制框图(3)根据控制框图抽象出数学模型,利用MA TLAB建立仿真模型。 8.一种路径预测的方法(考虑高速公路即用圆弧和直线的组合拟合目标路径)(1)预瞄模型(2)路径预测(3)利用最优控制理论建立一个控制器,实现在预瞄区间【KT,(K+1)T】内寻找一个控制规律使得建立的性能指标最小(5)仿真评价设计的控制器的性能。
地图中最短路径的搜索算法研究综述 (1)
地图中最短路径的搜索算法研究 学生:李小坤导师:董峦 摘要:目前为止, 国内外大量专家学者对“最短路径问题”进行了深入的研究。本文通过理论分析, 结合实际应用,从各个方面较系统的比较广度优先搜索算法(BFS)、深度优先搜索算法(DFS)、A* 算法的优缺点。 关键词:最短路径算法;广度优先算法;深度优先算法;A*算法; The shortest path of map's search algorithm Abstract:So far, a large number of domestic and foreign experts and scholars on the" shortest path problem" in-depth study. In this paper, through theoretical analysis and practical application, comprise with the breadth-first search algorithm ( BFS ), depth-first search algorithm ( DFS ) and the A * algorithms from any aspects of systematic. Key words: shortest path algorithm; breadth-first algorithm; algorithm; A * algorithm; 前言: 最短路径问题是地理信息系统(GIS)网络分析的重要内容之一,而且在图论中也有着重要的意义。实际生活中许多问题都与“最短路径问题”有关, 比如: 网络路由选择, 集成电路设计、布线问题、电子导航、交通旅游等。本文应用深度优先算法,广度优先算法和A*算法,对一具体问题进行讨论和分析,比较三种算的的优缺点。 在地图中最短路径的搜索算法研究中,每种算法的优劣的比较原则主要遵循以下三点:[1] (1)算法的完全性:提出一个问题,该问题存在答案,该算法能够保证找到相应的答案。算法的完全性强是算法性能优秀的指标之一。 (2)算法的时间复杂性: 提出一个问题,该算法需要多长时间可以找到相应的答案。算法速度的快慢是算法优劣的重要体现。 (3)算法的空间复杂性:算法在执行搜索问题答案的同时,需要多少存储空间。算法占用资源越少,算法的性能越好。 地图中最短路径的搜索算法: 1、广度优先算法 广度优先算法(Breadth-First-Search),又称作宽度优先搜索,或横向优先搜索,是最简便的图的搜索算法之一,这一算法也是很多重要的图的算法的原型,Dijkstra单源最短路径算法和Prim最小生成树算法都采用了和宽
蚁群算法最优路径
机器人的路径规划---蚁群算法 1.蚁群算法 众所周知,蚁群算法是优化领域中新出现并逐渐引起重视的一种仿生进化算法它是群体智能的典型实现,是一种基于种群寻优的启发式搜索算法。自从M.Dorigo等意大利学者在1991年首先提出蚁群算法(Ant Colony System,ACS)以来,这种新型的分布式智能模拟算法已逐渐引起人们的注意并得到广泛的使用。 蚁群算法的特点主要表现在以下五个方面: (1)蚂蚁群体行为表现出正反馈过程。蚁群在寻优的过程中会释放一定量的信息素,蚁群的规模越大,释放的信息素的量也就越大,而寻优路径上存在的信息素浓度越高,就会吸引更多的蚂蚁,形成一种正反馈机制,然后通过反馈机制的调整,可对系统中的较优解起到一个自增强的作用,从而使问题的解向着全局最优的方向演变,最终能有效地获得全局相对较优解。 (2)蚁群算法是一种本质并行的算法。个体之间不断进行信息交流和传递.有利于最优解的发现,并在很大程度上减少了陷于局部最优的可能。 (3)蚁群算法易于和其他方法结合。蚁族算法通过和其他算法的结合,能够扬长避短,提高算法的性能。 (4) 蚁群算法提供的解具有全局性的特点。一群算法是一种群只能算法,每只蚂蚁巡游的过程相对独立,他们会在自己的活动空间进行搜索,蚂蚁在寻优过程中通过释放信息素,相互影响,互相通信,保证了解的全局性。 (5) 蚁群算法具有鲁棒性。蚁族算法的数学模型易于理解,可以广泛使用在很多复杂的优化问题中,蚁族算法区别于传统优化算法的一个特点在于该算法不依赖于初始点的选择,受初始点的影响相对较小,并且在整个算法过程中会自适应的调整寻优路径。 由此可见,在机器人寻找最优路径的过程中,采用蚁群算法实现路径的规划问题,可以高效,准确的找到最优的路径。 2.移动机器人的路径规划 2.1环境信息处理 假设机器人运行环境为边长分别为x和Y的矩形区域,在矩形区域内分布有n