红绿灯的最佳配时
基于STC90C51单片机的智能交通灯设计
基于STC90C51单片机的交通灯设计 1、设计题目 基于STC90C51单片机的智能交通灯设计 2、设计要求 、系统功能 (1)按照交通规则,控制宝田路和前进路方向及其人行道的交通信号灯(红﹑黄﹑绿) 的通断。 (2)设置信号灯的通断时间。 (3)可人工干预,使交通信号灯开启不同模式。 、性能参数: (1)电源:5VDC (2)LED灯电流:10mA (3)定时时间:10s-200s 3、总体设计 根据系统功能和设计要求,系统采用单片机控制的方案,基于HC6800S开发板,由STC90C51,74HC573,交通灯模块,动态数码显示管以及4*2独立按键组成。 系统工作原理 在十字路口,分为宝田路和前进路,正常情况下,在任一时刻只有一个方向通行,另一方向禁行,持续一定时间,经过短暂的过渡时间,将通行禁行方向对换。其具体状态如下:? (1)普通模式: 状态一:宝田路通行阶段(宝田路及其人行道亮绿灯30秒、前进路及其人行道亮红灯 30秒); 状态二:黄灯阶段(宝田路和前进路亮黄灯5秒、两侧人行道亮红灯5秒); 状态三:前进路通行阶段(前进路及其人行道亮绿灯30秒、宝田路及其人行道亮红灯 30秒); 状态四:黄灯阶段(宝田路和前进路亮黄灯5秒、两侧人行道亮红灯5秒); 返回到状态一。 (2)高峰期模式(设宝田路为主干道): 按下按键2(key2),开启高峰期模式; 状态一:宝田路通行阶段(宝田路及其人行道亮绿灯60秒、前进路及其人行道亮红灯
30秒); 状态二:黄灯阶段(宝田路和前进路亮黄灯5秒、两侧人行道亮红灯5秒); 状态三:前进路通行阶段(前进路及其人行道亮绿灯30秒、宝田路及其人行道亮红灯30秒); 状态四:黄灯阶段(宝田路和前进路亮黄灯5秒、两侧人行道亮红灯5秒); 返回到状态一; 按键2释放,回到普通模式。 (3)紧急模式: 按下按键1(key1),开启紧急模式,所有道路及其人行道均红灯亮,数码管不显示。释放按键1,回到普通模式。 ?单片机交通控制系统的功能要求? 本设计能模拟基本的交通控制系统,用红绿黄灯表示禁行,通行和等待的信号发生,还能进行倒计时显示,通行时间调整功能和紧急情况全面禁行。? (1)倒计时显示? 倒计时显示可以提醒驾驶员在信号灯灯色发生改变的时间、在“停止”和“通过”两者间作出合适的选择。驾驶员和行人普遍都愿意选择有倒计时显示的信号控制方式,并且认为有倒计时显示的路口更安全。倒计时显示是用来减少驾驶员在信号灯色改变的关键时刻做出复杂判断的一种方法,它可以提醒驾驶员灯色发生改变的时间,帮助驾驶员在“停止”和“通过”两者间作出合适的选择?。? (2)时间的设置? 本设计中对时间进行了人为控制设置,正常情况下宝田路和前进路的绿灯通行与红灯禁行时间均设置为30秒、黄灯等待时间设置为5秒。假设前进路为主干道,考虑到主干道在上下班高峰期车流量和人流量较大,人为增加开关K2。当K2开启时,主干道前进路上绿灯通行时间和宝田路上的红灯禁行时间更改为60秒,其余设置均不变;当K1关闭时,又恢复正常情况下的时间设置。 (3)紧急情况全面禁行 本设计中在紧急情况下增加了全面禁行状态,增加开关K1。当K1开启时,宝田路和前进路及其各自人行道均量红灯禁行;当K1关闭时,交通灯恢复正常状态。 4、详细设计—硬件设计 为了实现本设计要求的具体功能,选用STC90C51单片机及外围器件构成最小控制系统,10个发光二极管分别分成两组红黄绿和两组红绿灯构成信号灯指示模块,4个LED动态数码管构成各个方向倒计时显示模式,两个按键分别用来设置高峰期模式和紧急模式。 、单片机系统设计
交通规则红绿灯和标志常识.
依次给大家介绍一下红绿黄信号的代表意思: 绿灯信号绿灯信号是准许通行信号。按《交通安全法实施条例》规定:绿灯亮时,准许车辆、行人通行,但转弯的车辆不准妨碍被放行的直行车辆和行人通行。 红灯信号红灯信号是绝对禁止通行信号。红灯亮时,禁止车辆通行。右转弯车辆在不妨碍被放行的车辆和行人通行的情况下,可以通行。红灯信号是带有强制意义的禁行信号,遇此信号时,被禁行车辆须停在停止线以外,被禁行的行人须在人行道边等候放行;机动车等候放行时,不准熄火,不准开车门,各种车辆驾驶员不准离开车辆;自行车左转弯不准推车从路口外边绕行,直行不准用右转弯方法绕行。 黄灯信号黄灯亮时,已越过停止线的车辆,可以继续通行。黄灯信号的含义介于绿灯信号和红灯信号之间,既有不准通行的一面,又有准许通行的一面。黄灯亮时,警告驾驶人和行人通行时间已经结束,马上就要转换为红灯,应将车停在停止线后面,行人也不要进入人行横道。但车辆如因距离过近不便停车而越过停止线时,可以继续通行。已在人行横道内的行人要视来车情况,或尽快通过,或原地不动,或退回原处。 闪光警告信号灯为持续闪烁的黄灯,提示车辆、行人通行时注意瞭望,确认安全后通过。这种灯没有控制交通先行和让行的作用,有的悬于路口上空,有的在交通信号灯夜间停止使用后仅用其中的黄灯加上闪光,以提醒车辆、行人注意前方是交叉路口,要谨慎行
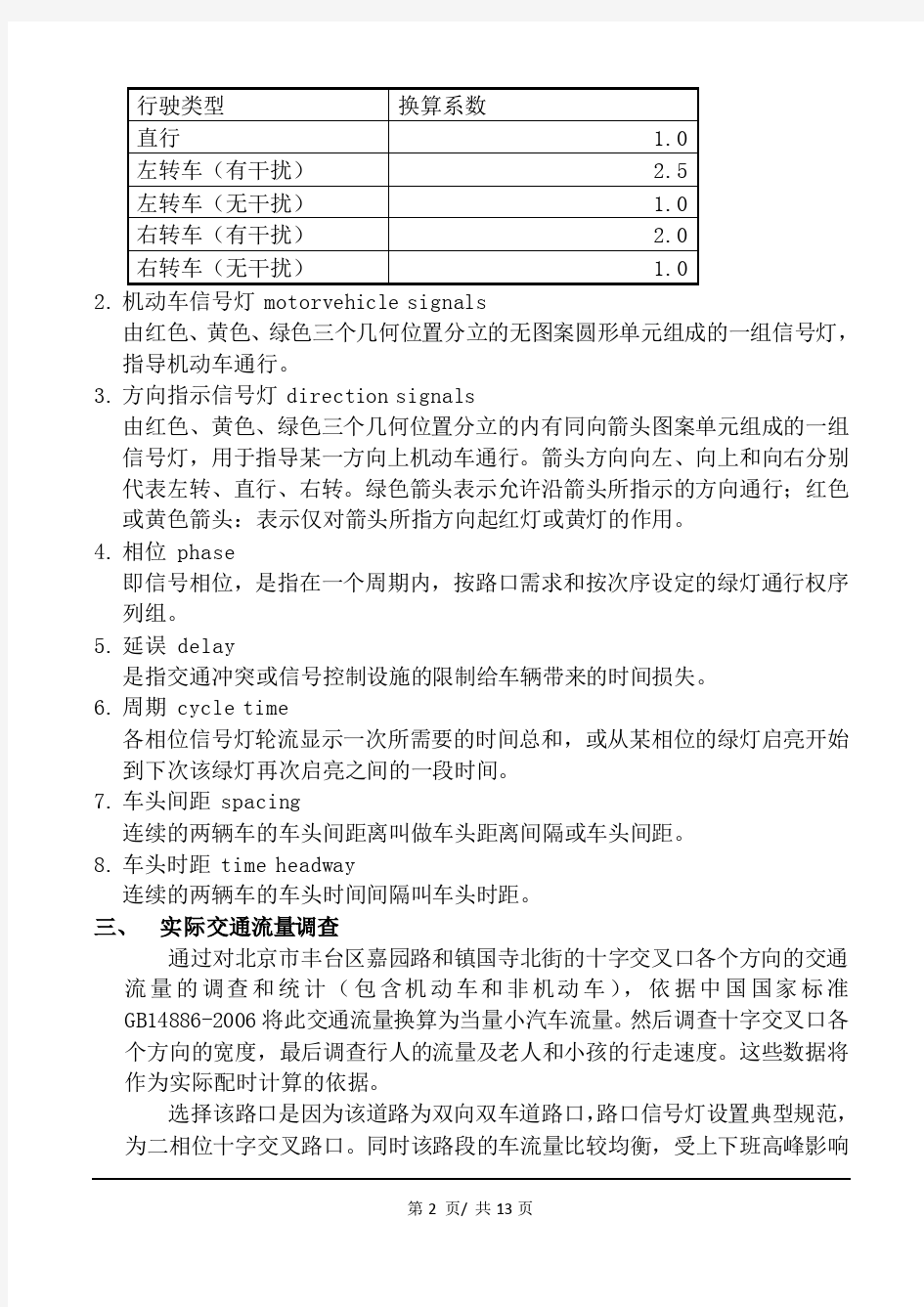
驶,认真观望,安全通过。在闪光警告信号灯闪烁的路口,车辆、行人通行时,即要遵守确保安全的原则,同时还应遵守没有交通信号或交通标志控制路口的通行规定。 方向指示信号灯方向信号灯是指挥机动车行驶方向的专用指示信号灯,通过不同的箭头指向,表示机动车直行、左转或者右转。它由红色、黄色、绿色箭头图案组成。 时常听到有驾驶询问红灯亮时,右转弯的车辆是否可以通行? 其实《中华人民共和国道路交通安全法》第二十六条:交通信号灯由红灯、绿灯、黄灯组成。红灯表示禁止通行,绿灯表示准许通行,黄灯表示警示。《中华人民共和国道路交通安全法实施条例》第三十八条对红、黄绿灯的含义进行了详解,机动车信号灯和非机动车信号灯表示:(一)绿灯亮时,准许车辆通行,但转弯的车辆不得妨碍被放行的直行车辆、行人通行;(二)黄灯亮时,已越过停止线的车辆可以继续通行;(三)红灯亮时,禁止车辆通行。在未设置非机动车信号灯和人行黄道信号灯的路口,非机动车和行人应当按照机动车信号灯的表示通行。右转弯的车辆在不妨碍被放行的车辆、行人通行的情况下,可以通行。 不管十字路口还是丁字路口 右转:如果有专门的箭头灯,必须按灯指示。如果没有专门灯,只要不影响直行车辆或非机动车道行人,都能转。 直行:红灯停、绿灯行 左转:如果有专门的箭头灯,必须按灯指示。有左转待转区,直行绿灯,左转红灯时,驶入待转区,左转绿灯亮后可以继续走。
遗传算法在交叉口配时优化中的应用
遗传算法在交叉口配时优化中的应用 摘要:介绍r模糊控制、人匸神经网络、遗传算法、蚁群算法、粒子群算法、女智能体等智能控制方法,详细分析了遗传算法的在交通控制领域的实际应用案例,更深入了解和学握了交通智能算法的应用。 关键词:优化:相位;配时参数:遗传算法 1引言 随着社会经济的发展,交通量急剧增长,交通拥堵加剧,交通事故频发,特别是在一些大城市,交通问题已成为制约城市经济发展的瓶颈⑴。为此,人们提岀建立智能交通系统(ITS)。作为ITS的重要组成部分,交通管理系统(ATMS〉在改善交通流秩序、提高交通安全性等方面发挥积极的作用。英中,交通信号优化控制是保证城市交通安全、有序、畅通、快速、高效运行的重要途径。当前,随着交通控制智能化的不断提高,智能控制方法在交通信号控制的重要性日益凸显。按照控制原理的不同,传统的交通信号控制分为宦时控制和感应控制。左时控制按事先设左的配时方案运行,英配时的依据是交通量历史数据°感应控制是某相位绿时根据车流量的变化而改变的一种控制方式,其中车流量可由安装在平面交叉口进口道上的车辆检测器测量。这两种控制方法存在共同的局限性:以数学模型为基础。由于城市交通系统中被控对象过程的非线性、较大的随机「?扰、过程机理错综复杂以及现场车辆检测的误差,建立精确的数学模型非常困难,这就适成了算法本身就有一定的缺陷。即使经过多次简化己建立的数学模型,它的求解还须简化计算才能完成。所以传统的交通控制方法并不能有效地解决目前复杂的交通问题。针对传统交通控制的固有缺陷和局限性,许多学者将模糊控制、神经网络、遗传算法、蚁群算法、多智能体技术等人工智能基础研究方法同常规交通控制方法结合应用。 2交通优化智能算法 2.1模糊逻辑 模糊逻辑是一种处理不确左性、非线性等问题的有力工具,与人类思维的某些特征相一致,故嵌入到推理技术中具有良好效果。模糊逻借不需要获取模型中的复杂关系,不需要建立精确的数学模型,是一种基于规则的智能控制方式,特别适用于具有较大随机性的城市交通控制系统。 2.2人工神经网络 人工神经网络是模拟生物的神经结构以及其处理信息的方式来进行计算的一种算法。它具有自适应、自组织和自学习能力,在认知处理、模式识别方而有很强的优势,最显著特点是具有学习功能。人工神经网络适用于非线性时变性系统的模拟与在线控制,交通控制系统正是一个非线性、时变系统。 2.3遗传算法 遗传算法是运用仿生原理实现在解空间的快速搜索,广泛应用于解决大规模组合优化问题。它是一种比较先进的参数寻优算法,对于不易建立数学模型的场合实实用价值较为突出,是以同样适用于交通工程。1997年,Kiseok和Michael等应用遗传算法对交通网络内的交叉口信号相位进行设计⑴,在交叉口形成的冲突点,结果显示该方法给出的相位方案要优于TRANSYT给岀的方案。同年,Memon等人给出了利用遗传算法进行信号配时方案设汁的研究结果。陈小锋,史忠科针对典型的多车道双向交叉路口的交通流分布, 建立四相位控制的动态交通控制模型,采用遗传算法同时对信号周期时长和相位绿灯持续时间进行优化⑶。承向军等对到达车辆数目进行模糊分类,将不同数量车辆的信号控制决策方案以规则集形式存储在知识库中,利用改进的遗传算法对交叉口信号模糊控制器的模糊规则进行优化,建立了新的优化算法【旬。顾榕等
智能交通灯开题报告
目录 一.交通灯来源及研究的目的和意义; 二.国内外关于交通灯的研究现状及分析; 三.交通灯主要研究内容; 四.研究方案及预期达到的目标 五. 进度安排; 六.预计研究过程中可能遇到的困难和问题,以及解决的措施;七.主要参考文献。
一、交通灯来源及研究的目的和意义 1.来源: 随着汽车工业的发展,车辆数量不断增加,交通管制的工作量越来越大,利用计算机代替人进行高效交通管理是必然的发展趋势,而让计 算机控制的交通灯拥有类似人类的感知智能,具有很强的现实意义,比 如通过检测电路及数据采集模块让交通灯控制系统发挥类似交警的作 用,使系统根据所“看到”交通情况自适应改变管制策略,提高了交通 管理的自动化水平,使得交通更高效、更顺畅。 早在1850年,城市十字路口不断增长的交通运输量就引发了人们对安全和拥堵的关注。,1868年,英国工程师纳伊特在伦敦威斯特敏斯特 街口安装了一台红绿两色的煤气照明灯,用来控制交叉路口马车的通行,拉开了城市交通控制的序幕。1914年,美国的克利夫兰、纽约和芝加哥 出现了电力驱动交通信号灯,与现在意义上的信号灯已经相差无几。1926 年英国人第一次安装和使用自动化的控制器来控制交通信号灯,这是城 市交通自动控制的起点。 计算机技术的出现为交通控制技术的发展注入了新的活力,更是实现了以一个城市或者更大地域,而非简单的一个路口的交通总体控制系 统。1952年,美国科罗拉多州丹佛市首次利用模拟计算机和交通检测器 实现了对交通信号机网的配时方案自动选择式信号灯控制,而加拿大多 伦多市于1964年完成了计算机控制信号灯的实用化,建立了一套由 IBM650型计算机控制的交通信号协调控制系统,成为世界上第一个具有 电子数字计算机城市交通控制系统的城市。这是道路交通控制技术发展 的里程碑。 2.研究目的及意义: 交通控制研究的发展,主要是为解决人类交通因车辆的增多而日益拥堵带来的问题,局限于道路建设的暂时不足和交通工具的快速增长,就要使更多的车辆安全高效的利用有限的道路资源,避免因无序和抢行 等控制原因造成的不必要阻塞甚至瘫痪,另外,针对整个交通线路车辆 的多少实时调整和转移多条线路的分流也十分必要。 交通网络是城市的动脉,象征着一个城市的工业发展水平。交通关系着人们对于财产,安全和时间相关的利益,保证交通线路的畅通安全,才能保证出行舒畅,物流准时到位,甚至是生命通道的延伸。
交通红绿灯配时优化模型研究
交通红绿灯配时优化模型研究 在人民物质生活日益提高的今天,解决交通的拥堵状况成为一大难题。文章通过对三角湖路口的交通状况进行探究,利用采集到的数据,如车辆的到达率和离开率,车辆的延误时间等,建立良好的模型,对红绿灯的时长进行相应的优化,达到优化等待时间的目的,最后将一些影响甚微的因素考虑进来,使得优化更精确。 标签:车辆到达率;离开率;延误时间;红绿灯时长 1 概述 近年来,随着国內经济的迅猛发展,人们的交通出行方式开始多样化,但机动车通行依然占据着主导地位,随着我国机动车数量的不断增多,交通事故和交通拥堵的现象也开始频发,而交叉路口在其中起着至关重要的作用,合理的优化红绿灯配时不仅能缓解交通压力,还能达到节能减排的目的,促进可持续发展。本文利用目前流行的红绿灯模型优化实际通行道路。 2 模型假设 (1)车辆在通行过程中,无交通事故造成拥堵。(2)忽略人为造成的交通现象。(3)忽略天气影响。(4)交通信号灯正常工作。 3 模型的建立 因为在不同的交叉路口,交通量呈现很大的随机性,所以在统计不同方向和车道的车辆时要尤为注意(在本次试验的路口有2个方向是无法左转的)。通过对车流量信息的统计,为模型建立提供数据。因为路口交通情况复杂,有很多因素影响着交通,如:过马路的行人数量,车辆的车速等等,那么如何来评定一个路口的交通状况好坏呢,可以利用车辆的延误时间的作为参考因素,因为车辆作为交叉路口通行情况的主要制造者,车辆因为各种因素造成的延误时间越长,交通状况就越差,延误时间越短,交通状况就越好,因为每个方向的车辆数,车道数存在差异,因此将4个方向的车辆延误时间之和,即总延误时间,作为评定标准。 通过实地研究发现,车辆的延误时间和每个路口车辆的到达率,离开率以及信号周期有关。记d为交叉路口的车辆到达率(辆/s),c为交叉路口的车辆离开率(辆/s),T为交叉路口信号周期(s),t绿为绿灯持续时间,发现:t1时刻红灯亮时,车辆陆续停留在路口等候,那么到达的车辆数就是车辆达到率乘车辆等候时间n1=d×t等,等到t2时刻绿灯亮时,车辆安全通过路口,当然不一定所有的等候车辆都能一次通过,有的车辆可能要等待2次红灯,那么在绿灯亮到t3时刻,即等候车辆都能安全通过(本文为优化交通状况,故视为一次均通过),通过车辆数为n2=c×(t3-t2)。当然离开率要大于到达率(不造成拥堵)。可以知
智能交通灯系统设计
智能交通灯系统设计 1.背景及意义 1.1.目的与意义 随着社会经济的发展,城市交通问题也越来越引起人们的关注,交通堵塞也成为人们每天必须面对的问题;交通堵塞不但浪费大量的时间,而且排队过程中刹车和怠速会浪费能源,同时也造成空气污染,如何有效的降低城市交通堵塞,协调好人、车、路三者之间的关系,已成为各大城市面临的难题之一。交通灯系统作为交通系统中的重要元素,对缓解交通堵塞扮演者重要角色。随着现在社会的飞速发展,红绿灯在道路上比较普遍,几乎每个路口都会出现,尤其是较大的路口,变换时间周期更长,效率低。因此,如何保证紧急车辆在道路上不受红绿灯的限制但又不闯红灯,使之畅通无阻的行驶,这便成为亟待解决的问题。本文主要针对这些问题,提出了智能交通灯系统的设计,该系统能够智能合理地设置红绿灯的时长以及相位的切换,就能够减少一个周期内十字路口前排队的车辆,从而有效地缓解交通堵塞。 1.2.国内外现状 交通灯诞生于19世纪的英国,1958年,在英国伦敦主要街头安装了以燃煤气为光源的红、蓝两色的机械扳手式信号灯,用以指挥马车通行。1868年,英国机械工程师纳伊特在伦敦威斯敏斯特区的会议大厦前的广场上安装了煤气红绿灯。1914年,电气启动的红绿灯出现在美国,这种红绿灯由红绿黄三色圆形的投光器组成。1918年又出现了带控制的红绿灯和红外线红绿灯,带控制的红绿灯,一种是把压力探测器按在地下,车辆接近时,红灯变为绿灯;另一种是用扩音器来启动红绿灯,司机遇红灯是按一下喇叭,就使红灯变为绿灯。红外线红绿灯当当行人踏上对压力敏感的路面时,它就能觉察到有人要过马路。红外光束能把红灯延长一段时间,推迟汽车放行。信号灯的出现,对交通进行有效管理,疏导交通流量、提高了道路通行能力,减少交通事故具有显著效果。欧洲及日本在交通灯的研究上起步较早,美国于上世纪九十年代才开始逐渐重
基于单片机的智能交通红绿灯控制系统设计
1选题背景 今天,红绿灯安装在各个道口上,已经成为疏导交通车辆最常见和最有效的手段。 信号灯的出现,使交通得以有效管制,对于疏导交通流量、提高道路通行能力,减少交通事故有明显效果。在交通中管理引入单片机交通灯控制代替交管人员在交叉路口服务,有助于提高交通运输的安全性、提高交通管理的服务质量。并在一定程度上尽可能的降低由道路拥挤造成的经济损失,同时也减小了工作人员的劳动强度。 关键词:AT89C51;7448,LED 2方案论证 2.1设计任务 设计基于单片机的智能交通红绿灯控制系统,要求能通过按键或遥控器设置系统参数,系统运行时,“倒计时等信息”能通过数码管或点阵发光管显示,设计时应考虑交通红绿灯控制的易操作性及智能性。以单片机的最小系统为基础设计硬件,用汇编语言、或C语言设计软件。通过本设计可以培养学生分析问题和解决问题的能力,掌握Mcs51单片机的硬件与软件设计方法,从而将学到的理论知识应用于实践中,为将来走向社会奠定良好的基础。 东西(A)、南北(B)两干道交于一个十字路口,各干道有一组红、黄、绿三个指示灯,指挥车辆和行人安全通行。红灯亮禁止通行,绿灯亮允许通行,黄灯亮时车辆及行人小心通过。红灯的设计时间为45秒,绿灯为40秒,黄灯为5秒。 2.2 方案介绍 方案1设计思想: 采用分模块设计的思想,程序设计实现的基本思想是一个计数器,选择一个单片机,其内部为一个计数,是十六进制计数器,模块化后,通过设置或程序清除来实现状 态的转换,由于每一个模块的计数多不是相同,这里的各模块是以预置数和计数器计 数共同来实现的,所以要考虑增加一个置数模块,其主要功能细分为,对不同的状态输 入要产生相应状态的下一个状态的预置数,如图中A道和B道,分别为次干道的置数选 择和主干道的置数选择。 方案2 设计思想: 由两个传感器监视南北方向即A道与东西方向即B道的车辆来往情况,设开关K=1 为有车通过,K=0为没有车通过。则有以下四种情况: Ka=1时:Kb=0,表示A有车B没有车,则仅通行B道:
智能交通灯的毕业设计
太原科技大学 毕业设计(论文)任务书化学与生物工程学院机电一体化专业10级3班设计人(作者):徐今 同组人:徐今吉武师海斌韩志刚 王煜贺斌兰晓江邢超斌一.毕业设计(论文)题目: 智能交通灯 二.原始数据(材料): (1)单片机LED灯显示设计 (2)用实验室模块演示 (3)软件protus仿真演示 (4)亚龙实验平台
目录 摘要------------------------------------1 AT89C51单片机简介----------------------2 一、设计目的---------------------------4 二、设计目标---------------------------4 三、设计任务---------------------------5 四、设计内容---------------------------6 (1)指示灯燃亮的状态----------------------6(2)设计并绘制硬件电路图。-------------7(3)设计程序流程图---------------------8(4)编程-------------------------------9 五、交通管理方案----------------------10 六、结束语----------------------------11 七、参考文献--------------------------13
摘要 交通在人们生活中占有重要地位,随着人们社会活动的日益频繁,这点更是体现的淋漓尽致。交通信号灯的出现,使交通得以有效管制,对于疏导交通流量,提高道路通行能力,减少交通事故,有明显的效果。近年来,随着科技的飞速发展,单片机的应用不断深入,同时带动传统控制检测技术日益更新和自动控制的单片机应用系统中。单片机往往作为一个核心部件来使用,仅单片机方面知识是不够的,还应根据具体硬件结构软硬件结合,加以完善。 本系统采用单片机AT89C51为中心器件,来设计交通灯控制器系统实用性强,操作简单,扩展性强。本设计就是采用单片机模拟十字路口交通灯的各种状态显示。本设计系统由单片机I/O口扩展系统、交通灯状态显示系统、复位电路等其它部分组成。较好的模拟实现了十字路口可能出现的交通情况。 关键字:电子线路、AT89C51、交通灯
交通路口红绿灯__数学建模
交通路口红绿灯 十字路口绿灯亮30秒,最多可以通过多少辆汽车?一问题重述 因为十字路口的交通现象较复杂,通过路口的车辆的多少依赖于路面上汽车的型号,数量和它们的行驶速度和方向以及同时穿过路口的非机动车辆的行人的状态等因素有关,因此,我们在求解“十字路口绿灯亮30秒,最多可以通过多少辆汽车”时应综合考虑各方面因素二模型假设 (1)十字路的车辆穿行秩序良好不会发生阻塞; (2)所有车辆都是直行穿过路口,不拐弯行驶,并且仅考虑马路一侧的车辆。 (3)所有车辆长度相同,并且都是从静止状态开始匀加速启动; (4)红灯下等侍的每辆相邻车之间的距离相等; (5)前一辆车启动后同后一辆车启动的延迟时间相等。 另外在红灯下等侍的车队足够长,以至排在队尾的司机看见绿灯又转为红灯时仍不能通过路口。 参数,变量:车长L,车距D,加速度a,启动延迟T,在时刻 t 第n 辆车的位置 S n(t) 用数轴表示车辆行驶道路,数轴的正向为汽车行驶方向, 数轴原点为红绿灯的位置。于是, 当S n(30)>0时, 表明在第30秒第n辆车已通过红绿灯,否则,结论相反。
三模型建立 1.停车位模型: S n(0)=–(n-1)(L+D) 2. 启动时间模型: t n =(n-1)T 3. 行驶模型: S n(t)=S n(0)+1/2 a (t-t n) 2, t>t n 参数估计 L=5m,D=2m,T=1s,a=2m/s 四模型求解 解: S n(30)=-7(n-1)+(30-(n-1))2>0 得 n≤19 且 t19=18<30=t 成立。 答案: 最多19辆车通过路口. 改进:考虑到城市车辆的限速,在匀加速运动启动后,达到最高限速后,停止加速, 按最高限速运动穿过路口。 最高限速:校园内v*=15公里/小时=4米/秒,长安街上v*=40公里/小时=11米/秒,环城路上 v*=60公里/小时=17米/秒 取最高限速 v*=11m/s,达到最高限速时间t n*=v* /a+t n =5.5+n-1 限速行驶模型: S n(t)=S n(0)+1/2 a(t n *–t n )2+v*(t-t n*), t>t n* =S n(0)+1/2 a (t-t n) 2, t n*>t>t n = S n(0) t n>t 解:S n(30)=-7(n-1)+(5.5)2+11(30-5.5-(n-1))>0 得 n≤17 且 t17 * =5.5+16=21.5<30=t 成立。 结论: 该路口最多通过17辆汽车.
考虑人均延误和人均排放的信号配时优化模型
第50卷 第9期2018年9月 哈 尔 滨 工 业 大 学 学 报JOURNAL OF HARBIN INSTITUTE OF TECHNOLOGY Vol.50No.9Sep.2018 DOI:10.11918/j.issn.0367-6234.201706174考虑人均延误和人均排放的信号配时优化模型 刘 畅,魏丽英 (北京交通大学交通运输学院,北京100044) 摘 要:为将绿色交通二公交优先等理念融入交叉口信号配时优化的建模策略当中,建立以交叉口人均延误二人均CO 排放为优化指标,以各相位有效绿灯时间为自变量的多目标信号配时优化模型.在人均延误公式中引入公交折减系数,用以避免公交绝对优先对社会车辆通行效率的负面影响.模型求解过程中运用模糊折中规划方法使量纲不同的两个目标函数实现无量纲化,令其取值在(0,l );采用模糊偏好方法计算两个目标的隶属度函数的权重值,进而将多目标函数转化为单目标函数;然后利用自适应惯性权重和异步学习因子相结合的优化粒子群算法,基于MATLAB 软件平台实现单目标函数的求解;最后将模型应用于实际案例,对各目标值进行比较分析.结果表明:优化后人均延误下降了0.94s ,下降幅度为3.87%.人均CO 排放量下降了1.25g ,下降幅度为12.74%.说明优化后的信号配时方案对于延误和排放具有优化作用,验证了模型的有效性.关键词:城市交通;信号配时;模糊折中规划;信号交叉口;粒子群算法 中图分类号:U121文献标志码:A 文章编号:0367-6234(2018)09-0083-06 Signaltimingoptimizationmodelconsideringpercapitadelayandpercapitaemissions LIUChang,WEI Liying (School of Trafficand Transportation,Beijing Jiaotong University,Beijing 100044,China)Abstract:To introduce the green trafficidea and the bus priority idea into the modeling strategy of signal timing optimization for intersections,a multi-objective signal timing optimization model varying with the phase effective green light time was proposed by considering the per capita delay and per capita CO emissions as the indexes.The bus deduction coefficient was introduced into the delay per capita to overcome the negative effect of absolute priority on private car.The fuzzy compromise method was used to transform the two objective functions of different dimensions into a single objective function,and to determine the values of two dimensions lie in (0,l).Fuzzy preference method was used to determine the membership function weights in the single objective function.The improved PSO (particle swarm optimization )which combines the SAPSO (self-adaptive particle swarm optimization)and the AsyLnCPSO (asynchronous learning-factor changing particle swarm optimization)were used to solve the single objective function based on the MATLAB software platform.Finally,the model was applied to an actual case and the target values were compared and analyzed.Results showed that the per capita delay reduced by 0.94s and decreased by 3.87%after optimization.The per capita CO emission reduced by 1.25g and decreased by 12.74%.The optimized signal timing scheme has an optimal effect on delay and emission,and the validity of the model was observed.Keywords:urban traffic;signal timing;fuzzy compromise programming;signalized intersection;particle swarm optimization 收稿日期:2017-08-16 作者简介:刘 畅(1994 ),女,硕士研究生; 魏丽英(1974 ),女,副教授,硕士生导师通信作者:魏丽英,lywei@bjhttps://www.360docs.net/doc/1f193447.html,.cn 交通拥堵和环境污染已成为许多国家和地区所面临的严峻挑战,发展公共交通和控制尾气排放被 认为是缓解这些问题的有效手段.国内外已有很多 学者展开这方面的研究,如文献[1]在公交专用道 不连续的情况下,建立了信号配时优化模型;文献 [2]提出了一种分析公交信号优先策略(绿灯早启和绿灯延长)对于车辆延误影响的分析方法;文献 [3]以总延误最小为目标优化信号周期,依据相位乘客流量比和相位饱和度确定绿信比.文献[4]根据公交车运行特性,在单点配时模型基础上,建立了定时式相邻交叉口的公交优先信号协调控制模型.但在已有研究中,评价指标多为车均延误二排队长度二通行能力等.同时以人均延误替代车均延误指标,以人均排放替代排放总量指标,可以体现以人为本和公交优先的思想,赋予公交一定的优先权,故本文建立了既考虑人均延误,又考虑人均排放的多目标信号配时优化模型,在保证公交运行效益的同时,万方数据
智能交通灯系统设计样本
智能交通灯系统设 计
智能交通灯系统设计 1.背景及意义 1.1.目的与意义 随着社会经济的发展,城市交通问题也越来越引起人们的关注,交通堵塞也成为人们每天必须面正确问题;交通堵塞不但浪费大量的时间,而且排队过程中刹车和怠速会浪费能源,同时也造成空气污染,如何有效的降低城市交通堵塞,协调好人、车、路三者之间的关系,已成为各大城市面临的难题之一。交通灯系统作为交通系统中的重要元素,对缓解交通堵塞扮演者重要角色。随着现在社会的飞速发展,红绿灯在道路上比较普遍,几乎每个路口都会出现,特别是较大的路口,变换时间周期更长,效率低。因此,如何保证紧急车辆在道路上不受红绿灯的限制但又不闯红灯,使之畅通无阻的行驶,这便成为亟待解决的问题。本文主要针对这些问题,提出了智能交通灯系统的设计,该系统能够智能合理地设置红绿灯的时长以及相位的切换,就能够减少一个周期内十字路口前排队的车辆,从而有效地缓解交通堵塞。1.2.国内外现状 交通灯诞生于19世纪的英国,1958年,在英国伦敦主要街头安装了以燃煤气为光源的红、蓝两色的机械扳手式信号灯,用以指挥马车通行。1868年,英国机械工程师纳伊特在伦敦威斯敏斯特区的会议大厦前的广场上安装了煤气红绿灯。19 ,电气启动的
红绿灯出现在美国,这种红绿灯由红绿黄三色圆形的投光器组成。19 又出现了带控制的红绿灯和红外线红绿灯,带控制的红绿灯,一种是把压力探测器按在地下,车辆接近时,红灯变为绿灯;另一种是用扩音器来启动红绿灯,司机遇红灯是按一下喇叭,就使红灯变为绿灯。红外线红绿灯当当行人踏上对压力敏感的路面时,它就能觉察到有人要过马路。红外光束能把红灯延长一段时间,推迟汽车放行。信号灯的出现,对交通进行有效管理,疏导交通流量、提高了道路通行能力,减少交通事故具有显著效果。欧洲及日本在交通灯的研究上起步较早,美国于上世纪九十年代才开始逐渐重视智能交通信号控制系统的研究。 20世纪70年代末,澳大利亚成功研制出了SCATS系统,该系统采用分层控制,以饱和度和综合量为主要依据,分别对信号周期、相位差和绿信比进行优选,该系统没有建立数学模型而是根据情况从各种已经制定的方案选择最优的方案,可是该系统配时方案有限。20世纪70年代初,英国研制出了SCOOT系统,该系统是一种自适应系统,采用小步长渐进寻优的办法,以使配时参数随交通流量改变而作适量调整,从而短期内适应交通流量的变化趋势,以防止因配时突变而引起的车流不稳定。 ,英国推出了全面升级的SCOOT摄像技术智能交通灯系统,该系统采用的是视频摄像技术,经过自动计算需要过马路的人群数量来调整相应的红绿灯时间。当检测到大量的行人在等待,系统会自动延长绿灯放行的时间,让人们有充分的时间过马路。另
各种交通信号灯信号详解,红绿灯交通灯
各种交通信号灯信号详解,红绿灯交通灯 有部分驾驶人、行人对交通信号灯不适应、不了解,闯灯越线、不走斑马线、不按规定车道行驶。因此提醒广大市民、驾驶人,加强交通安全知识学习,自觉遵守交通信号灯。 驾车交通灯 绿灯信号 绿灯信号是准许通行信号。按《交通安全法实施条例》规定:绿灯亮交通信号灯时,准许车辆、行人通行,但转弯的车辆不准妨碍被放行的直行车辆和行人通行。 红灯信号 红灯信号是绝对禁止通行信号。红灯亮时,禁止车辆通行。右转弯车辆在不妨碍被放行的车辆和行人通行的情况下,可以通行。红灯信号是带有强制意义的禁行信号,遇此信号时,被禁行车辆须停在停止线以外,被禁行的行人须在人行道边等候放行;机动车等候放行时,不准熄火,不准开车门,各种车辆驾驶员不准离开车辆;自行车左转弯不准推车从路口外边绕行,直行不准用右转弯方法绕行。 黄灯信号 黄灯亮时,已越过停止线的车辆,可以继续通行。黄灯信号的含义介
于绿灯信号和红灯信号之间,既有不准通行的一面,又有准许通行的一面。黄灯亮时,警告驾驶人和行人通行时间已经结束,马上就要转换为红灯,应将车停在停止线后面,行人也不要进入人行横道。但车辆如因距离过近不便停车而越过停止线时,可以继续通行。已在人行横道内的行人要视来车情况,交通信号灯或尽快通过,或原地不动,或退回原处。 闪光信号警告灯 为持续闪烁的黄灯,提示车辆、行人通行时注意瞭望,确认安全后通过。这种灯没有控制交通先行和让行的作用,有的悬于路口上空,有的在交通信号灯夜间停止使用后仅用其中的黄灯加上闪光,以提醒车辆、行人注意前方是交叉路口,要谨慎行驶,认真观望,安全通过。在闪光警告信号灯闪烁的路口,车辆、行人通行时,即要遵守确保安全的原则,同时还应遵守没有交通信号或交通标志控制路口的通行规定 方向指示信号灯 方向信号灯是指挥机动车行驶方向的专用指示信号灯,通过不同的箭头指向,表示机动车直行、左转或者右转。它由红色、黄色、绿色箭头图案组成。 车道信号灯 车道灯由绿色箭头灯和红色叉形灯组成,设在可变车道上,只对本车道起作用。绿色箭头灯亮时,准许本车道车辆按指示方向通行;红色叉形灯或者箭头灯亮时,禁止本车道车辆通行。
智能交通灯系统的工作原理
智能交通灯系统的工作原理 (1)我们来计算一下,每车道通行20秒内可以通过20辆车,一个红绿灯循环是40秒(单交叉路口),加上每次状态转换的黄灯5秒(一个循环要两次转换),即一个红绿黄灯循环要50秒,即50秒内通行的车辆为40辆。通过一辆车的平均时间是1.25秒。如果每次车辆通行的时间改为40秒,40秒内每车道可以通过45辆,一个红绿灯循环是80秒(单交叉路口),加上每次状态转换的黄灯5秒(一个循环要两次转换),即一个红绿黄灯循环要90秒,即90秒内通行的车辆为90辆。通过一辆车的平均时间只需1秒。显然在车辆拥挤的情况下绿灯的通行时间越长,单位时间内通行的车辆越多,可以有效缓解车辆拥堵问题。 在非拥挤时段绿灯的通行时间的下限为20秒,当交叉路口双方车辆较少时通行时间设为20秒,这样可以大大缩短车辆在红灯面前的等待时间;当交叉路口双方车辆较多时通行时间设为40秒。 (3)车流量检测及调整 因为路上的车不可能突然增多,塞车都有一个累积过程。这样控制可以把不断增多的车辆一步一步消化,虽然最后由于每个路口的绿灯放行时间延长而使等候的时间变长,但比塞车等候的时间短得多。 手动设置:除系统根据车流量自动控制调整,也可以通过键盘进行手动设置,增加了人为的可控性,避免自动故障和意外发生,并再紧急状态下,可设置所有灯变为红灯。键盘是单片机系统中最常用的人机接口,一般情况下有独立式和行列式两种。本系统要求的按键控制不多,且I/O口足够,可直接采用独立式。及前者软件编写简单。 交通路口出现紧急状况在所难免,如特大事件发生,救护车等急行车通过等,我们都必须尽量允许其畅通无阻,毕竟在这种情况下是分秒必争的,时时刻刻关
智能交通灯
《嵌入式》 课程设计报告题目:智能交通灯 专业:计算机 班级: 学号: 姓名: 指导教师: 完成日期:2
目录 一、前言 (1) 1.1课题研究背景 (1) 1.2课程研究目的和意义 (1) 二、需求分析 (2) 三、开发环境及系统结构 (3) 3.1开发环境 (3) 3.2系统结构 (3) 四、详细设计 (4) 4.1程序框架设计 (4) 4.23秒程序的控制 (5) 4.28秒程序的控制 (6) 五、结论 (7) 5.1实验截图 (7) 附件1 (10)
一、前言 1.1 课题研究背景 交通是城市经济活动的命脉,对城市经济发展、人民生活水平的提高起着十分重要的作用。城市交通问题自人类进入21世纪以来,道路交通一直是困扰城市发展、制约城市经济建设的重要因素。而使用合理的交通灯可以合理的规划城市交通,从而为城市的快速运输和发展提供最优化的交通解决方案。 可以肯定的说,城市道路增长的有限与车辆增加的无限这一对矛盾是导致城市交通拥挤的根本原因。对于减轻交通拥塞及其副作用特别是对于大的交通网络而言,仍然缺乏一种真正的交通响应控制策略。计算机硬件能力与控制软件能力很不相符,由此造成的影响是很多交通控制策略根本不能实现。在少数几个例子中,一些新的控制策略确实能得以实现,但他们却没能对早期的控制策略进行改进。由于缺乏能提高交通状况、特别是缺乏拥塞网络交通状况的实时控制策略,几乎可以说真正成熟的控制策略仍然不存在.智能化和集成化是城市交通信号控制系统的发展趋势和研究前沿,而针对交通系统规模复杂性特征的控制结构和针对城市交通瓶颈问题并代表智能决策的阻塞处理则是智能交通控制优化管理的关键和突破口。 1.2 课程研究目的和意义 车辆的不断增多,表明车辆对道路容量的要求仍然很高,短期内还不可能改变。自从开始使用计算机控制系统后,不管在控制硬件里取得什么样的实际进展,交通控制领域的控制逻辑方面始终没能取得重大突破。 因此,研究基于智能集成的城市交通信号控制系统具有相当的学术价值和实用价值。把智能控制引入到城市交通控制系统中,未来的城市交通控制系统才能适应城市交通的发展。从长远来看该研究具有巨大的现实意义。
交通信号灯,交通红绿灯安全常识
交通信号灯、交通红绿灯安全常识 《中华人民共和国道路交通安全法实施条例》的相关规定: 第二十九条交通信号灯分为:机动车信号灯、非机动车信号灯、人行横道信号灯、车道信号灯、方向指示信号灯、闪光警告信号灯、道路与铁路平面交叉道口信号灯。第五十一条机动车通过有交通信号灯控制的交叉路口,应当按照下列规定通行: (一)在划有导向车道的路口,按所需行进方向驶入导向车道; (二)准备进入环形路口的让已在路口内的机动车先行; (三)向左转弯时,靠路口中心点左侧转弯。转弯时开启转向灯,夜间行驶开启近光灯;(四)遇放行信号时,依次通过; (五)遇停止信号时,依次停在停止线以外。没有停止线的,停在路口以外; (六)向右转弯遇有同车道前车正在等候放行信号时,依次停车等候; (七)在没有方向指示信号灯的交叉路口,转弯的机动车让直行的车辆、行人先行。相对方向行驶的右转弯机动车让左转弯车辆先行。 第三十八条机动车信号灯和非机动车信号灯表示: (一)绿灯亮时,准许车辆通行,但转弯的车辆不得妨碍被放行的直行车辆、行人通行;(二)黄灯亮时,已越过停止线的车辆可以继续通行; (三)红灯亮时,禁止车辆通行。 在未设置非机动车信号灯和人行横道信号灯的路口,非机动车和行人应当按照机动车信号灯的表示通行。 红灯亮时,右转弯的车辆在不妨碍被放行的车辆、行人通行的情况下,可以通行。 第四十条车道信号灯表示: (一)绿色箭头灯亮时,准许本车道车辆按指示方向通行; (二)红色叉形灯或者箭头灯亮时,禁止本车道车辆通行。 机动车驾驶员要注意车道信号灯和机动车信号灯的区别,车道信号灯在信号灯的下面有箭头的,机动车信号灯则没有。 第五十二条机动车通过没有交通信号灯控制也没有交通警察指挥的交叉路口,除应当遵守第五十一条第(二)项、第(三)项的规定外,还应当遵守下列规定: (一)有交通标志、标线控制的,让优先通行的一方先行; (二)没有交通标志、标线控制的,在进入路口前停车了望,让右方道路的来车先行;(三)转弯的机动车让直行的车辆先行; (四)相对方向行驶的右转弯的机动车让左转弯的车辆先行。
智能交通灯控制报告
摘要:智能交通是改善现有交通运输性能,加强安全出行的有效方式。本文介绍了基于无线传感网络ZigBee的智能交通红绿灯控制系统,利用了巨磁阻传感器和CC2530芯片实现数据传输通信,实现对交通信号进行动态控制,智能调整红绿灯时间,来提高道路交通流量,环节交通拥堵状况。 关键词:智能交通 ZigBee CC2530 巨磁阻传感器传感器节点 1 绪论 1.1 课题背景 随着经济的快速发展,生活方式变得更加快捷,城市的道路也逐渐变得纵横交错,快捷方便的交通在人们生活中占有及其重要的位置,而交通安全问题则是重中之重。 在中国,城市的道路纵横交错,形成很多交叉口,相交道路的各种车辆和行人都要在交叉口处汇集通过。而目前的交通情况是人车混行现象严重,非机动车的数量较大,路口混乱。由于车辆和过街行人之间、车辆和车辆之间、特别是非机动车和机动车之间的干扰,不仅会阻滞交通,而且还容易发生交通事故。根据调查数据统计,我国发生在交叉口的交通事故约占道路交通事故的1/ 3,在所有交通事故类型中居首位,对交叉口交通安全影响最大的是冲突点问题,其在很大程度上是由于信号灯配时不合理(如黄灯时间太短,驾驶员来不及反应),以及驾驶员不遵循交通信号灯,抢绿灯末或红灯头所引发交通流运行的不够稳定。随着我国经济的快速发展,私家车也越来越多,交通控制还是延续原有的定时控制,在车辆增加的基础上,这种控制弊端也越来越多的体现出来,造成了十字交叉路口的交通拥堵和秩序混乱,严重的影响了人们的出行。智能交通中的信号灯控制显示出了越来越多的重要性。1.2 课题目的和任务 针对目前中国的交叉路口多,车流量大,交通混乱的现象研究一种控制交通信号灯的基于无线传感器的智能交通系统。 本文主要介绍了利用HMC1021Z巨磁阻传感器、LED数码管、AT89C51以及CC2530组成的无线传感网络在智能交通中的应用,本文的研究内容如下: 首先查阅了国内外文献了解课题研究背景、磁阻传感器的工作原理以及铁磁物质对周围磁场产生影响的原理,并了解AT89C51的结构及功能。 对整个系统的方案进行设计,通过进一步学习完善已有的设计方案。 将设计方案转化为电路图,画出电路版图,投片,完成硬件平台的搭建。 进行软件的编程,及硬件的调试。 将软件和硬件结合到一起,进行模拟路况实验。 1.3 课题流程简介 1汽车含有大量的铁磁物质,行走过程中会对周围的地磁场产生影响,HMC1021Z巨磁阻传感器的磁敏器件可以感受到磁场变化,将信号传送给AT89C51。 2 AT89C51通过传感器发送的信号,进行车辆计数,并将计数值写入1号CC2530模块。 3 1号CC2530模块将计数值发送给2号CC2530模块,2号CC2530模块将数据传给主控芯片,主控芯片进行数据处理,反馈出控制信息并控制红绿灯时间。