电动车辆减速器研制及应用

《研讨资料三》
自控1103班
徐越
201108902 电动车辆减速器三种型号特点及其改进后性能指标
多年来,我国铁路调车场驼峰车辆减速器点式制动设备一直使用的是风压式和油压式减速器,即TJK型空压车辆减速器和TJY型液压车辆减速器。这些设备初期就要较大的投人运营使用中动力系统还需要较大的维修量。能否用电动式替代风压式和油压式而解决上述弊端。多年来许多国家都投人一定精力作了大量的尝试和探索。
新型TJD电动减速器主要有以下特点:
1.六连杆机构,采用直角直线双重锁闭,锁闭可靠,解锁方便,消除了因机械卡阻意造成的不缓解状态。
2.该锁闭机构将被制动车辆的反作用力(冲击力)卸载到底板上,有效防止了电动机轴受到的冲击。
3.以电能作为工作能源,可以省掉能源转换的中间环节,作为一种新的制式,扩大了选用范围。
4.在380V额定电压下,工作电流保持在10A,降低了配电条件。
现在主要的电动减速器有以下几种:
1.TJD1型电动车辆减速器
TJD1型电动车辆减速器的总体设计思路是:改进和设计专用电动机,由其和传动机构替代液压动力机构驱动TJY-2型重力式减速器实现调速制动目的。研究试验过程中对电动机性能进行不断改进减轻了电动器的重量增大了转矩控制部分采用了最新技术和具有当时先进水平的电器元件使电动车辆减速器从研制阶段进人实验应用阶段。通过上道试验后TJD1(内侧式)电动车辆减速器通过了铁道部的技术审查。
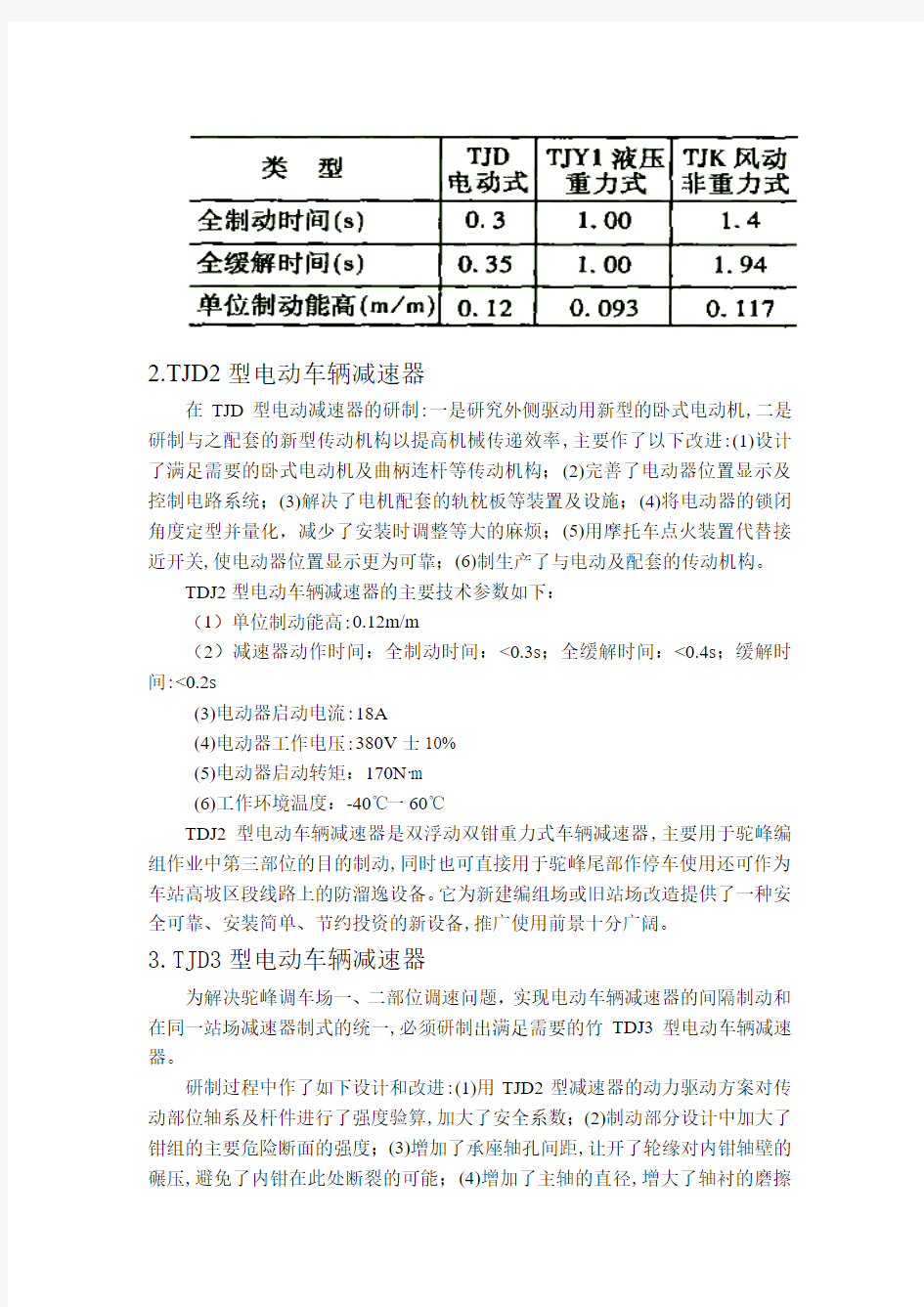
电动车辆减速器与风压式、油压式减速器相比较,具有动作快、控制精高、节省电能、结构简单、安装维修简便等显著优点,令人瞩目,与风压式和油压式减速器的主要技术参数对比如表1:
2.TJD2型电动车辆减速器
在TJD型电动减速器的研制:一是研究外侧驱动用新型的卧式电动机,二是研制与之配套的新型传动机构以提高机械传递效率,主要作了以下改进:(1)设计了满足需要的卧式电动机及曲柄连杆等传动机构;(2)完善了电动器位置显示及控制电路系统;(3)解决了电机配套的轨枕板等装置及设施;(4)将电动器的锁闭角度定型并量化,减少了安装时调整等大的麻烦;(5)用摩托车点火装置代替接近开关,使电动器位置显示更为可靠;(6)制生产了与电动及配套的传动机构。
TDJ2型电动车辆减速器的主要技术参数如下:
(1)单位制动能高:0.12m/m
(2)减速器动作时间:全制动时间:<0.3s;全缓解时间:<0.4s;缓解时间:<0.2s
(3)电动器启动电流:18A
(4)电动器工作电压:380V士10%
(5)电动器启动转矩:170N·m
(6)工作环境温度:-40℃一60℃
TDJ2型电动车辆减速器是双浮动双钳重力式车辆减速器,主要用于驼峰编组作业中第三部位的目的制动,同时也可直接用于驼峰尾部作停车使用还可作为车站高坡区段线路上的防溜逸设备。它为新建编组场或旧站场改造提供了一种安全可靠、安装简单、节约投资的新设备,推广使用前景十分广阔。
3.TJD3型电动车辆减速器
为解决驼峰调车场一、二部位调速问题,实现电动车辆减速器的间隔制动和在同一站场减速器制式的统一,必须研制出满足需要的竹TDJ3型电动车辆减速器。
研制过程中作了如下设计和改进:(1)用TJD2型减速器的动力驱动方案对传动部位轴系及杆件进行了强度验算,加大了安全系数;(2)制动部分设计中加大了钳组的主要危险断面的强度;(3)增加了承座轴孔间距,让开了轮缘对内钳轴壁的碾压,避免了内钳在此处断裂的可能;(4)增加了主轴的直径,增大了轴衬的磨擦
面积,延长了使用寿命;(5)在减速器两端钳组轴孔处,增加一突出块,用于预防制动轨向内翻转。
经过现场近两年的运营试验,设备运行稳定,制动能力大、制动缓解时间快。试验结果表明,TDJ3型电动车辆减速器无论在性能上还是在产品质量上,都更加成熟和完善。其主要技术参数如下:
(1)单位制动能高:0.125m/m
(2)减速器动作时间全制动时间:<0.3s,缓解时间<0.2
(3)电动机启动电流:25A
(4)电动器工作电压:380V士10%
(5)电动机额定启动转矩:235N·m
(6)工作环境温度:-40℃一60℃
(7)减速器可与自动、半自动控制系统联机
电动车辆减速器作为一种新型制式的钳夹式减速器,技术上虽具有一定的特点,但目前仍需对减速器的制动和缓解的可靠性,及电机寿命做进一步研究。
参考文献
[1]李俊娥.驼峰信号[M],中国铁道出版社,2008.7.
[2]赵西平.郑州铁路实业有限公司技术开发部,2006.6.
[3]付学伟.驼峰信号控制[M],中国铁道出版社,2009.11
汽车主减速器设计
主减速器设计 3.2 主减速器设计 3.2.1 主减速器的结构型式 主减速器的结构型式,主要是根据其齿轮类型、主动齿轮和从动齿轮的安置方法以及减速型式的不同而异。 (1)主减速器齿轮的类型 在现代汽车驱动桥上,主减速器采用得最广泛的是螺旋锥齿轮和双曲面齿轮。在双级主减速器中,通常还要加一对圆柱齿轮(多采用斜齿圆柱齿轮),或一组行星齿轮。在轮边减速器中则常采用普通平行轴式布置的斜齿圆柱齿轮传动或行星齿轮传动。在某些公共汽车、无轨电车和超重型汽车的主减速器上,有时也采用蜗轮传动。 (2)主减速器主动锥齿轮的支承型式及安置方法 在壳体结构及轴承型式已定的情况下,主减速器主动齿轮的支承型式及安置方法,对其支承刚度影响很大,这是齿轮能否正确啮合并具有较高使用寿命的重要因素之一。 现在汽车主减速器主动锥齿轮的支承型式有以下两种: 悬臂式 齿轮以其轮齿大端一侧的轴颈悬臂式地支承于一对轴承上。为了增强支承刚度,应使两轴承支承中心间的距离齿轮齿面宽中点的悬臂长度大两倍以上,同时比齿轮节圆直径的70%还大,并使齿轮轴径大于等于悬臂长。当采用一对圆锥滚子轴承支承时,为了减小悬臂长度和增大支承间的距离,应使两轴承圆锥滚子的小端相向朝内,而大端朝外,以缩短跨距,从而增强支承刚度。 (3)主减速器从动锥齿轮的支承型式及安置方法 主减速器从动锥齿轮的支承刚度依轴承的型式、支承间的距离和载荷在支承之间的分布而定。为了增加支承刚度,支承间的距离应尽可能缩小。两端支承多采用圆锥滚子轴承,安装时应使他们的圆锥滚子的大端相向朝内,小端相背朝外。为了防止从动齿轮在轴向载荷作用下的偏移,圆锥滚子轴承也应预紧。 轿车和轻型载货汽车主减速从动锥齿轮采用无辐式结构并用细牙螺钉以精度较高的紧配合固定在差建界壳的突缘上。这种方法对增强刚性效果较好,中型和重型汽车主减速从动锥齿轮多采用有幅式结构并有螺栓或铆钉与差速器壳突缘连结。 (4)主减速器的轴承预紧及齿轮啮合调整 支承主减速器齿轮的圆锥滚子轴承需预紧以消除安装的原始间隙、磨合期间该间隙的增大及增强支承刚度。预紧力的大小与安装形式、载荷大小、轴承刚度特性及使用转速有关。 主动锥齿轮轴承预紧度的调整,可通过精选两轴承内圈间的套筒长度、调整垫圈厚度、轴承与轴肩之间的调整垫片等方法进行。近年来采用波形套筒调整轴承预紧度极为方便,波形套筒安装在两轴承内圈间或轴承与轴肩间。 (5)主减速器的减速型式 主减速器的减速型式分为单级减速、双级减速、双速减速、单级贯通、双级贯通、主减速及轮边减速等。 单级主减速器 由于单级主减速器具有结构简单、质量小、尺寸紧凑及制造成本低廉的优点,广
精密减速器在工业机器人上的作用
随着现代科技的飞速发展,机器人已不只是存在于影视作品中,人们逐渐可以发现,在我们的社会生活中越来越多地方都开始使用服务型机器人,甚至很多人家里也有诸如扫地机器人之类的产品。除此以外,还有一类使用频率较高的工业机器人。但是,不论是服务型机器人还是工业机器人,都会使用到精密减速器,但很少有人了解这一仪器具体有何作用,下面就给大家介绍一下。 工业机器人的动力源一般为交流伺服电机,因为由脉冲信号驱动,其伺服电机本身就可以实现调速,为什么工业机器人还需要减速器呢?工业机器人通常执行重复的动作,以完成相同的工序;为保证工业机器人在生产中能够可靠地完成工序任务,并确保工艺质量,对工业机器人的定位精度和重复定位精度要求很高。因此,提高和确保工业机器人的精度就需要采用RV减速器或谐波减速器。精密减速器在工业机器人中的另一作用是传递更大的扭矩。当负载较大时,一味提高伺服电机的功率是很不划算的,可以在适宜的速度范围内通过减速器来提高输出扭矩。此外,伺服电机在低频运转下容易发热和出现低频振动,对于长时间和周期性工作的工业机器人这都不利于确保其精确、可靠地运行。 精密减速器的存在使伺服电机在一个合适的速度下运转,并精确地将转速降
到工业机器人各部位需要的速度,提高机械体刚性的同时输出更大的力矩。与通用减速器相比,机器人关节减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点。大量应用在关节型机器人上的减速器主要有两类:RV减速器和谐波减速器。 相比于谐波减速器,RV减速器具有更高的刚度和回转精度。因此在关节型机器人中,一般将RV减速器放置在机座、大臂、肩部等重负载的位置;而将谐波减速器放置在小臂、腕部或手部;行星减速器一般用在直角坐标机器人上。 以上就是由四川志方科技有限公司为大家提供的关于精密减速器在工业机器人上的作用信息,如果你对此感兴趣,或者想要了解更多相关信息,建议咨询专业机构。
车辆减速器是机械化
车辆减速器的概述 车辆减速器是机械化、半自动化和自动化驼峰编组站,对溜放中的车辆进行速度控制,使车辆溜入编组线的速度满足安全连挂要求的主要调速设备。驼峰编组站安装车辆减速器可以提高解编能力,保障作业和人身安全,减轻劳动强度。 目前铁路解编列车,最有效的方法任然是利用装有车辆减速器(或辅以其他调速设备)的机械化、半自动化和自动化驼峰调车场。 从1914年德国开始安装试验减速器,1924年美国正式使用减速器以来,经过几十年的改进与发展。早期发展的驼峰主要是机械化驼峰,因而间隔制动减速器得到较充分的发展。我国从1955年开始减速器的研究,改良了GEP-31型,仿制出了DK-59型。1966年研制成功了T.JY型(原66-11型)液压重力型减速器。1977年在DK-59型的基础上又改进设计了T.JK型气动非重力式减速器。1987年,为了简化结构、降低造价、提高性能、节省能源和便于维修,研制成功了液压传动T。T.JY3型、气压传动T.JK3型。 随着我国铁路运输的不断发展,编组站逐渐由机械化发展为半自动化和自动化,减速器也逐渐由间隔制动发展为目的制动。近20年来,目的制动减速器得到了很大的发展。为了满足驼峰半自动化和自动化的要求,自1975年研制成功T.JY1型(原7501型)减速器以后,1982年又研制成功了T.JY2型液压重力式减速器,1986年还研制成功了T.JK2型和T.JK2-A型气动重力式减速器。减速器的控制方式也从最简单的手动控制发展到半自动化和计算机控制,实现了驼峰溜放的自动化。 目前我国铁路应用的车辆减速器分为T.JY和T.JK两大系列,T.JY型为液压型,T.JK 型为气动式。T.JK系列浮轨重力式车辆减速器T.JK3、T.JK2、T.JK2-A型和T.JY系列浮轨重力式车辆减速器T.JY3、T.JY2、T.JY2-A型机体分别对应相同,其区别仅在于工作缸、控制阀和管道。T.JK系列车辆减速器用气缸、气动阀和气管;T.JY系列车辆减速器用油缸、液压阀和油管。车辆减速器的系列化和标准化,有利于生产、使用和维修,深受现场欢迎。 随着编组站运量和车辆轴重的增加,1995年又研制成功了改进型高强度和适用于50kg/m钢轨的减速器T.JK(Y)3-A(50)型,T.JK(Y)2-A(50)型,形成了新的系列化产品T.JK3-A、T.JK2-A和T.JY3-A、T.JY2-A的A系列,T.JK3-A50、T.JK2-A50和T.JY3-A50、T.JY2-A50的50系列。这些新的系列化产品在保持原有性能指标的基础上,增加了强度,提高了寿命,减少了维修,将逐步替代T.JK(Y)-(50)、T.JK(Y)2系列产品推广使用。为进一步增加减速器的寿命,减少维修,2000年又研制成功了新的目的制动减速器T.JK(Y)2-B(50)型,将作为T.JK(Y)2-A(50)型的替代产品推广使用。
主减速器设计
第三节 主减速器设计 一、主减速器结构方案分析 主减速器的结构形式主要是根据齿轮类型、减速形式的不同而不同。 主减速器的齿轮主要有螺旋锥齿轮、双曲面齿轮、圆柱齿轮和蜗轮蜗杆等形式。 1.螺旋锥齿轮传动 螺旋锥齿轮传动(图5-3a)的主、从动齿轮轴线垂直相交于一点,齿轮并不同时在全长上啮合,而是逐渐从一端连续平稳地转向另一端。另外,由于轮齿端面重叠的影响,至少有两对以上的轮齿同时啮合,所以它工作平稳、能承受较大的负荷、制造也简单。但是在工作中噪声大,对啮合精度很敏感,齿轮副锥顶稍有不吻合便会使工作条件急剧变坏,并伴随磨损增大和噪声增大。为保证齿轮副的正确啮合,必须将支承轴承预紧,提高支承刚度,增大壳体刚度。 图5—3 主减速器齿轮传动形式 a)螺旋锥齿轮传动 b)双曲面齿轮传动 c)圆柱齿轮传动 d)蜗杆传动 2.双曲面齿轮传动 双曲面齿轮传动(图5-3b)的主、从动齿轮的轴线相互垂直 而不相交,主动齿轮轴线相对从动齿轮轴线在空间偏移一距离 E ,此距离称为偏移距。由于偏移距E 的存在,使主动齿轮螺 旋角1β大于从动齿轮螺旋角2β(图5—4)。根据啮合面上法向 力相等,可求出主、从动齿轮圆周力之比 2121cos cos ββ=F F (5-1) 图5-4双曲面齿轮副受力情况 式中,F 1、F 2分别为主、从动齿轮的圆周力;β1、β2分别为主、从动齿轮的螺旋角。 螺旋角是指在锥齿轮节锥表面展开图上的齿线任意一点A 的切线TT 与该点和节锥顶 点连线之间的夹角。在齿面宽中点处的螺旋角称为中点螺旋角(图5—4)。通常不特殊说 明,则螺旋角系指中点螺旋角。 双曲面齿轮传动比为 1 12211220cos cos ββr r r F r F i s == (5-2)
机器人精密齿轮传动减速器
随着技术的不断发展,工业对人力的使用开始减少,工业逐渐进入机械工作,我们经常能看到,工厂生产线上工作的不再是工人,而是一条条灵活的机械臂。之所以工业机器人能够精准的进行生产操作,就在于其拥有精密减速器的控制。但是机器人的精密减速器在长期投入使用后也会有磨损,进而精密度下降,这时候就需要对减速器进行检测调整,需要用到专门的机器人减速器测试系统,下面就给大家介绍一下这款产品。 产品洋细介绍 一、.系统概述: 针对机器人诚速器(RVi谐波)性能及疲劳寿命测试需求,减速器(RV谐波)性能及疲劳寿命测试台对性能研究和考核试验及疲劳寿命耐久测试。采用先进的模块组合模式,通过各种组合可完成不同的测试项目,采用高精度传感器及实时数据采集系统,完成各种性能测试。耐久台架测试机器人减速器疲劳寿命测试,对测试装置关键件进行了分析,并进行了试验验证。采用往复摆动的惯性负载构件加载,模拟机器人诚速器实际使用的运动方式,能高效、准确地进行加速疲劳寿命试验。
二、机器人精密齿轮传动减速器(RV/谐波)性能/耐久测试系统 1、试验项目: ●空载摩擦转矩 ●启动转矩 ●反向启动转矩 ●传动效率试验 ●超载试验. ●滞回曲线 ●扭转刚度 ●回差试验 , 传动误差 ●寿命试验 ●噪声试验 ●温升试验 ●振动试验 ●弯曲刚度(刚度台架) ●稳态循环加载耐久试验 自定义工控模拟试验 ●弯曲刚度试验 ●疲劳寿命耐久试验 ●可变模拟载荷谱 ●寿命折算
●其它用户自定义试验 2、试验台系统设计主要依据的标准: ●GBT 35089-2018机器人用精密齿轮传动装置试验方法●GB/T 30819-2014机器人用谐波齿轮减速器 ●GBT 37165-2018机器人用摆线针轮减速机 ●GBT 37718-2019机器人用精密行星摆线减速器(1) ●GB/T 14118-1993谐波传动诚速器 ●GBT 11281-2009微电机用齿轮减速器通用技术条件●JB/T 5558-2015减(增)速器试验方法 ●其它相关的技术要求 3、试验环境要求: ●电源电压: 380+10%; ●电源电压: 220+10%; ●环境温度: 0~40°C; ●相对湿度:≤90%; ●冷却水压:≥0.15Mpa; . ●接地要求:要有独立的接地地线; ●供电系统连接: 手动操作的分断设备。 4、试验设备组成: ●驱动部分:伺服驱动系统、。 ●加载部分:伺服加载系统。 ●电测部分:扭矩转速测量系统、光栅角度测量系统。
汽车主减速器设计
主减速器设计 3、2 主减速器设计 3、2、1 主减速器的结构型式 主减速器的结构型式,主要就是根据其齿轮类型、主动齿轮与从动齿轮的安置方法以及减速型式的不同而异。 (1)主减速器齿轮的类型 在现代汽车驱动桥上,主减速器采用得最广泛的就是螺旋锥齿轮与双曲面齿轮。在双级主减速器中,通常还要加一对圆柱齿轮(多采用斜齿圆柱齿轮),或一组行星齿轮。在轮边减速器中则常采用普通平行轴式布置的斜齿圆柱齿轮传动或行星齿轮传动。在某些公共汽车、无轨电车与超重型汽车的主减速器上,有时也采用蜗轮传动。 (2)主减速器主动锥齿轮的支承型式及安置方法 在壳体结构及轴承型式已定的情况下,主减速器主动齿轮的支承型式及安置方法,对其支承刚度影响很大,这就是齿轮能否正确啮合并具有较高使用寿命的重要因素之一。 现在汽车主减速器主动锥齿轮的支承型式有以下两种: 悬臂式 齿轮以其轮齿大端一侧的轴颈悬臂式地支承于一对轴承上。为了增强支承刚度,应使两轴承支承中心间的距离齿轮齿面宽中点的悬臂长度大两倍以上,同时比齿轮节圆直径的70%还大,并使齿轮轴径大于等于悬臂长。当采用一对圆锥滚子轴承支承时,为了减小悬臂长度与增大支承间的距离,应使两轴承圆锥滚子的小端相向朝内,而大端朝外,以缩短跨距,从而增强支承刚度。
(3)主减速器从动锥齿轮的支承型式及安置方法 主减速器从动锥齿轮的支承刚度依轴承的型式、支承间的距离与载荷在支承之间的分布而定。为了增加支承刚度,支承间的距离应尽可能缩小。两端支承多采用圆锥滚子轴承,安装时应使她们的圆锥滚子的大端相向朝内,小端相背朝外。为了防止从动齿轮在轴向载荷作用下的偏移,圆锥滚子轴承也应预紧。 轿车与轻型载货汽车主减速从动锥齿轮采用无辐式结构并用细牙螺钉以精度较高的紧配合固定在差建界壳的突缘上。这种方法对增强刚性效果较好,中型与重型汽车主减速从动锥齿轮多采用有幅式结构并有螺栓或铆钉与差速器壳突缘连结。 (4)主减速器的轴承预紧及齿轮啮合调整 支承主减速器齿轮的圆锥滚子轴承需预紧以消除安装的原始间隙、磨合期间该间隙的增大及增强支承刚度。预紧力的大小与安装形式、载荷大小、轴承刚度特性及使用转速有关。 主动锥齿轮轴承预紧度的调整,可通过精选两轴承内圈间的套筒长度、调整垫圈厚度、轴承与轴肩之间的调整垫片等方法进行。近年来采用波形套筒调整轴承预紧度极为方便,波形套筒安装在两轴承内圈间或轴承与轴肩间。 (5)主减速器的减速型式 主减速器的减速型式分为单级减速、双级减速、双速减速、单级贯通、双级贯通、主减速及轮边减速等。 单级主减速器 由于单级主减速器具有结构简单、质量小、尺寸紧凑及制造成本低廉的优点,广泛用在主减速比i0<7、6的各种中、小型汽车上。单级主减速器都就是采用一对
【汽车行业类】汽车制动性能检测
(汽车行业)汽车制动性 能检测
第四章汽车制动性能检测 制动检验台常见的分类方法有:按测试原理不同,可分为反力式和惯性式俩类;按检验台支撑车轮形式不同,可分为滚筒式和平板式俩类;按检测参数不同,可分为测制动力式、测制动距离式、测制动减速度式和综合式四种;按检验台的测量、指示装置、传递信号方式不同,可分为机械式、液力式和电气式三类;目前国内汽车综合性能检测站所用制动检验设备多为反力式滚筒制动检验台和平板式制动检验台。目前国内外已研制出惯性式防抱死制动检验台但价格昂贵,短期内难以普及应用。本章内容重点介绍反力式滚筒制动试验台。 第壹节制动台结构及工作原理 壹、反力式滚筒制动检验台 1.基本结构 反力式滚筒制动检验台的结构简图如图2-4-1所示。它由结构完全相同的左右俩套对称的车轮制动力测试单元和壹套指示、控制装置组成。每壹套车轮制动力测试单元由框架(多数试验台将左、右测试单元的框架制成壹体)、驱动装置、滚筒组、举升装置、测量装置等构成。 图2-4-1反力式制动检验台结构简图 (1)驱动装置 驱动装置由电动机、减速器和链传动组成。电动机经过减速器减速后驱动主动滚筒,主动滚筒通过链传动带动从动滚筒旋转。减速器输出轴和主动滚筒同轴连接或通过链条、皮带连接,减速器壳体为浮动连接(即可绕主动滚筒轴自由摆动)。日式制动台测试车速较低,壹般为0.1~0.18km/h,驱动电动机的功率较小,为2×0.7~2×2.2kW;而欧式制动台测试车速相对较高,为2.0~5km/h,驱动电动机的功率较大,为2×3~2×11kW。减速器的作用是减速增扭,其减速比根据电动机的转速和滚筒测试转速确定。由于测试车速低,滚筒转速也较低,壹般在40~100r/min范围(日式检验台转速则更低,甚至低于10r/min)。因此要求减速器减速比较大,壹般采用俩级齿轮减速或壹级蜗轮蜗杆减速和壹级齿轮减速。 理论分析和试验表明,滚筒表面线速度过低时测取协调时间偏长、制动重复性较差,过高时对车轮损伤较大,推荐使用滚筒表面线速度为2.5km/h左右的制动台。 (2)滚筒组 每壹车轮制动力测试单元设置壹对主、从动滚筒。每个滚筒的俩端分别用滚筒轴承和轴承座支承在框架上,且保持俩滚筒轴线平行。滚筒相当于壹个活动的路面,用来支承被检车辆的车轮,且承受和传递制动力。汽车轮胎和滚筒间的附着系数将直接影响制动检验台所能测得的制动力大小。为了增大滚筒和轮胎间的附着系数,滚筒表面都进行了相应加工和处理,目前采用较多的有下列5种: ①开有纵向浅槽的金属滚筒。在滚筒外圆表面沿轴向开有若干间隔均匀、有壹定深度的沟槽。这种滚筒表面附着系数最高可达0.65。当表面磨损且沾有油、水时附着系数将急剧下降。为改进附着条件有的制动台表面进壹步作拉花和喷涂处理,附着系数可达0.75之上。 ②表面粘有熔烧铝矾土砂粒的金属滚筒。这种滚筒表面无论干或湿时其附着系数可达0.8之上。 ③表面具有嵌砂喷焊层的金属滚筒。喷焊层材料选用NiCrBSi自熔性合金粉末及钢砂。这种滚筒表面新的时候其附着系数可达0.9之上,其耐磨性也较好。 ④高硅合金铸铁滚筒。这种滚筒表面带槽、耐磨,附着系数可达0.7~0.8,价格便宜。 ⑤表面带有特殊水泥覆盖层的滚筒。这种滚筒比金属滚筒表面耐磨。表面附着系数可达 0.7~0.8。但表面易被油污和橡胶粉粒附着,使附着系数降低。 滚筒直径和俩滚筒间中心距的大小,对检验台的性能有较大影响。滚筒直径增大有利于改善和车轮之间的附着情况,增加测试车速,使检测过程更接近实际制动状况。但必须相应
货车主减速器结构设计
工程技术大学 课程设计 题目:中型货车主减速器结构设计 班级:汽车 学号: 姓名: 指导教师: 完成日期: 2011.12.25
一、设计题目 中型货车主减速器结构设计 二、设计参数 驱动形式:4*2后驱最高车速:98km/h 轴距: 4700mm 最大爬坡度:30% 轮距: 1900mm/1900mm 汽车长宽高: 7000mm/2000mm/2300mm 整备质量:3650kg 变速器传动比:5.06 4.016 3.09 1.71 1 4.8 额定载质量:4830kg 轮胎型号: 8.25-16 前后轴负荷: 1900kg/1750kg 3060kg/5420kg 离地间隙:300mm 前后悬架长度:1100mm/1200mm 三、设计要求 (1)总装图1张(2)零件图2张(3)课程设计说明书(5000~8000字)1份 四、进度安排(参考) (1)熟悉相关资料和参考图2天(2)确定基本参数和主要结构尺寸2天(3)设计计算3天(4)绘制总装配草图4天(5)绘制总装配图2天(6)绘制零件图2天(7)编写说明书3天(8)准备及答辩3天 五、指导教师评 成绩: 指导教师 日期
摘要 主减速器是汽车驱动桥的重要组成部分,本设计通过对国内外汽车主减速器结构和特点的分析和根据给定数据的计算,从发动机的最大功率和最大转矩入手,估算主减速器的传动比并选定减速器的类型。设计主减速器齿轮,校核其强度并选定减速器主动锥齿轮、差速器半轴齿轮和行星齿轮等。通过理论的计算和对主减速器实际工作情况的分析,设计了能够满足中型货车使用要求的单级主减速器。 关键词:主减速器;锥齿轮;减速装置;差速器;驱动桥
第四章 汽车制动性能检测
第四章汽车制动性能检测 制动检验台常见的分类方法有:按测试原理不同,可分为反力式和惯性式两类;按检验台支撑车轮形式不同,可分为滚筒式和平板式两类;按检测参数不同,可分为测制动力式、测制动距离式、测制动减速度式和综合式四种;按检验台的测量、指示装置、传递信号方式不同,可分为机械式、液力式和电气式三类;目前国内汽车综合性能检测站所用制动检验设备多为反力式滚筒制动检验台和平板式制动检验台。目前国内外已研制出惯性式防抱死制动检验台但价格昂贵,短期内难以普及应用。本章内容重点介绍反力式滚筒制动试验台。 第一节制动台结构及工作原理 一、反力式滚筒制动检验台 1.基本结构 反力式滚筒制动检验台的结构简图如图2-4-1所示。它由结构完全相同的左右两套对称的车轮制动力测试单元和一套指示、控制装置组成。每一套车轮制动力测试单元由框架(多数试验台将左、右测试单元的框架制成一体)、驱动装置、滚筒组、举升装置、测量装置等构成。 图 2-4-1 反力式制动检验台结构简图 (1)驱动装置 驱动装置由电动机、减速器和链传动组成。电动机经过减速器减速后驱动主动滚筒,主动滚筒通过链传动带动从动滚筒旋转。减速器输出轴与主动滚筒同轴连接或通过链条、皮带连接,减速器壳体为浮动连接(即可绕主动滚筒轴自由摆动)。日式制动台测试车速较低,一般为0.1~0.18km/h, 驱动电动机的功率较小,为2×0.7~2×2.2kW;而欧式制动台测试车速相对较高,为2.0~5km/h,驱动电动机的功率较大,为2×3~2×11kW。减速器的作用是减速增扭,其减速比根据电动机的转速和滚筒测试转速确定。由于测试车速低,滚筒转速也较低,一般在40~100r/min范围(日式检验台转速则更低,甚至低于10r/min)。因此要求减速器减速比较大,一般采用两级齿轮减速或一级蜗轮蜗杆减速与一级齿轮减速。 理论分析与试验表明,滚筒表面线速度过低时测取协调时间偏长、制动重复性较差,过高时对车轮损伤较大,推荐使用滚筒表面线速度为2.5km/h左右的制动台。 (2)滚筒组
汽车主减速器设计说明书
摘要 汽车主减速器是汽车传动中的最重要的部件之一.它能够将万向传动装置产来的发动机转矩传给驱动车轮,以实现降速增扭。 本次设计的是有关十米高一级客车后桥主减速器设计总成。并要使其具有通过性。本次设计的内容包括有:方案选择,结构的优化与改进。齿轮与齿轮轴的设计与校核,以及轴承的选用与校核.并且在设计过程中,描述了主减速器的组成和差速器的差速原理和差速过程。 方案确定主要依据原始设计参数,对比同类型的减速器及差速器,确定此轮的传动比,并对其中重要的齿轮进行齿面接触和齿轮弯曲疲劳强度的校核。而对轴的设计过程中着重齿轮的布置,并对其受最大载荷的危险截面进行强度校核,轴承的选用力求结构简单且满足要求。 主减速器及差速器对提高汽车行驶平稳性和其通过性有着独特的作用,是汽车设计的重点之一。 关键词:主减速器;差速器;转速;行星齿轮;传动比
Abstract Automobil reduction final drive is one of the best impossible parts in automobile gearing。It can chang speed and driving tuist within a big scope . The problem of this design is ten meters passager car reduction final unit ,it’ s properly in common use 。The design of scheme,the better design and improvement of structure ,the design and calibration of gear and gear shiftes , and the select of bearings ,and also the design explain the construction of differential action 。 The ting of the scheme desierment main deside。The drive ratio of gear ,according to orginal design parameter and constrasting the same type reduction final drive ang differential assay . It realize planet gear in the design of structure . It put to use alteration better gears transmission in the design of gear ,and compare the root contact tired strength of some important gears and the face twirl tired strength . It eraphaize pay attention to the place of gears。Compare the strength of the biggest load dangraes section。It require structure simple and accord with demand in select of bearings 。 Key words :Reduction final ,Differential ,Rotational speed ,Plantet gear , Drive ratio
工业机器人RV减速机的机械 原理【详述】
工业机器人RV减速机的机械原理 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 当我们在无限憧憬工业机器人时代的时候,你可曾知道,工业机器人最关键的机械结构之一RV减速机,到今天,中国仍然不具备设计和制造能力。“十二五”时期,国家“863”计划将其列入重点攻克的技术瓶颈。国内顶尖大学和科研机构几年攻关也只有论文,没有实物。工业机器人所有核心零部件中,减速机最为关键。 工业机器人成本结构大致如下:本体22%、伺服系统25%、减速器38%、控制系统10%以及其他5%。简单拆分国内6轴工业机器人成本(总成本25万元),可以看出减速器和伺服电机两项成本接近13万元,主要以进口为主。 一、RV减速机的机械原理 德国人劳伦兹·勃朗于1926年创造性地提出了一种少齿差行星传动机构,它是用外摆线作为齿廓曲线的,这就是最早期的针摆行星传动,由于两个啮合齿轮其中之一采用了针轮的形式,这种传动也被称做摆线针轮行星齿轮传动。 RV传动一种全新的传动方式,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,而且因为具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。 第1减速部…正齿轮减速机构 输入轴的旋转从输入齿轮传递到直齿轮,按齿数比进行减速。这是第一减速部。 第2减速部…差动齿轮减速机构
直齿轮与曲柄轴相连接,变为第二减速部的输入。在曲柄轴的偏心部分,通过滚动轴承安装RV齿轮。另外,在外壳内侧仅比RV齿轮数多一个的针齿,以同等的齿距排列。 如果固定外壳转动直齿轮,则RV齿轮由于曲柄轴的偏心运动也进行偏心运动。此时如果曲柄轴转动一周,则RV齿轮就会沿与曲柄轴相反的方向转动一个齿。这个转动被输出到第2减速部的轴。将轴固定时,外壳侧成为输出侧。 二、RV减速机对工业机器人的重要性 工业机器人第一关节到第四关节全部使用RV减速机,轻载工业机器人第五关节和第六关节有可能使用谐波减速机。重载工业机器人所有关节都需要使用RV减速机。平均而言,每台工业机器人使用4.5台RV减速器。2013年世界工业机器人销量18万台,需使用减速机90万台。工业机器人的动力源一般为交流伺服电机,因为由脉冲信号驱动,其伺服电机本身就可以实现调速,为什么工业机器人还需要减速器呢?工业机器人通常执行重复的动作,以完成相同的工序;为保证工业机器人在生产中能够可靠地完成工序任务,并确保工艺质量,对工业机器人的定位精度和重复定位精度要求很高。因此,提高和确保工业机器人的精度就需要采用RV减速器或谐波减速器。精密减速器在工业机器人中的另一作用是传递更大的扭矩。当负载较大时,一味提高伺服电机的功率是很不划算的,可以在适宜的速度范围内通过减速器来提高输出扭矩。此外,伺服电机在低频运转下容易发热和出现低频振动,对于长时间和周期性工作的工业机器人这都不利于确保其精确、可靠地运行。 精密减速器的存在使伺服电机在一个合适的速度下运转,并精确地将转速降到工业机器人各部位需要的速度,提高机械体刚性的同时输出更大的力矩。与通用减速器相比,工业机器人关节减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点。 大量应用在关节型工业机器人上的减速器主要有两类:RV减速器和谐波减速器。相比于谐波减速器,RV减速器具有更高的刚度和回转精度。因此在关节型工业机器人中,一般将RV减速器放置在机座、大臂、肩部等重负载的位置;而将谐波减速器放置在小臂、腕部或手
工业机器人核心部件-谐波减速器
工业机器人核心部件-谐波减速器
机器人驱动系统要求传动系统间隙小、刚度大、输出扭矩高以及减速比大,常用的减速机构有: 1)RV减速机构; 2)谐波减速机械; 3)摆线针轮减速机构; 4)行星齿轮减速机械; 5)无侧隙减速机构; 6)蜗轮减速机构; 7)滚珠丝杠机构; 8)金属带/齿形减速机构; 9)球减速机构。 其中谐波减速器广泛应用于小型的六轴搬运及装配机械手中,下面介绍其工作原理。
以下内容摘自百度百科(稍有修改): 谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器。谐波齿轮传动(简称谐波传动),它是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动。 (一)传动原理 它主要由三个基本构件组成: (1)带有内齿圈的刚性齿轮(刚轮)2,它相当于行星系中的中心轮; (2)带有外齿圈的柔性齿轮(柔轮)1,它相当于行星齿轮; (3)波发生器H,它相当于行星架。 作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。
波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。波发生器是使柔轮产生可控弹性变形的构件。当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器H相反方向的缓慢旋转。 在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以 n 表示。常用的是双波和三波两种。双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。故为目前应用最广的一种。 谐波齿轮传动的柔轮和刚轮的周节相同,但齿数不等,通常采用刚轮与柔轮齿数差等于波数,即 z2-z1=n 式中 z2、z2--分别为刚轮与柔轮的齿数。 当刚轮固定、发生器主动、柔轮从动时,谐波齿轮传动的传动比为 i=-z1/(z2-z1) 双波传动中,z2-z1=2,柔轮齿数很多。上式负号表示柔轮的转向与波发生器的转向相反。由此可看出,谐波减速器可获得很大的传动比。 (二)特点 1.承载能力高谐波传动中,齿与齿的啮合是面接触,加上同时啮合齿数(重叠系数)比较多,因而单位面积载荷小,承载能力较其他传动形式高。 2.传动比大单级谐波齿轮传动的传动比,可达 i=70~500。 3.体积小、重量轻。 4.传动效率高、寿命长。 5.传动平稳、无冲击,无噪音,运动精度高。 6.由于柔轮承受较大的交变载荷,因而对柔轮材料的抗疲劳强度、加工和热处理要求较高,工艺复杂。 谐波减速器在国内于六七十年代才开始研制,到目前已有不少厂家专门生产,并形成系列化。广泛应用于电子、航天航空、机器人等行业,由于它的独特优点,在化工行业的应用也逐渐增多。
第七章 汽车制动防抱死系统
第七章汽车制动防抱死系统 制动防抱死系统功用、基本组成及控制方式 1、ABS功用 制动防抱死系统(简称ABS,Anti-lock Brake System),是汽车上的一种主动安全装臵。其作用就是防止汽车制动时车轮抱死拖滑,并把车轮的滑移率保持在Sp左右的一定范围内,以提高汽车制动过程中的方向稳定性、转向控制能力和缩短制动距离,使汽车制动更为安全有效。 ABS的优点: (1)制动时保持方向稳定性(图7-1)。控制车轮滑动率基本在20%附近,有效防止汽车侧滑、甩尾、调头等现象发生。 图7-1 保持方向稳定性 (2)制动时保持转向控制能力,如图7-2。不会出现汽车前轮抱死产生的方向失控事故。 图7-2 保持转向控制能力 (3)缩短制动距离(松散的沙土和积雪较深的路面除外)(图7-3)。保持制动力在最佳的范围内。 图7-3 缩短制动距离 (4)减少轮胎磨损。车轮保持在既滚又滑的状态,克服车轮抱死造成的轮胎杯型磨损和轮胎面磨损不均匀的缺点。 (5)减少驾驶员紧张情绪。传统制动系统进行制动时,驾驶员往往产生一种紧张情绪,缺乏安全感。
装备ABS 与未装备ABS 汽车相比,各项安全指标的下降百分比见图7-4。 图7-4 安全指标比较 2、ABS 基本组成及控制原理 制动防抱死系统是在常规制动装臵的基础上增加一电子控制系统,一般由传感器、电子控制器(ECU)和执行器(制动压力调节器)组成(图7-5)。 图7-5 ABS 基本组成及控制原理示意图 传感器感受系统控制所需的汽车行驶状态参数,并将运动物理量转换成为电信号。电子控制器根据传感器信号及其内部存储信号,经过计算、比较和判断后,向执行器发出控制指令,同时监控系统的工作状况。执行器则根据ECU 的指令,依靠由电磁阀及相应的液压控制阀组成的液压调节系统对制动系统实施增压、保压或减压的操作(图7-6),让车轮始终处于理想的运动状态。 a )增压
主减速器设计
课程论文 主减速器的设计 指导教师 学院名称专业名称
摘要 汽车主减速器作为汽车驱动桥中重要的传力部件,是汽车最关键的部件之一。它承担着在汽车传动系中减小转速、增大扭矩的作用,同时在动力向左右驱动轮分流的差速器之前设置一个主减速器,可以使主减速器前面的传动部件,如变速箱、分动器、万向传动装置等传递的扭矩减小,同时也减小了变速箱的尺寸和质量,而且操控灵敏省力。汽车主减速器结构多种多样,主要是根据其齿轮类型、主动齿轮和从动齿轮的安置方法以及减速型式的不同而异。按照主减速器齿轮的类型分为:螺旋锥齿轮和双曲面齿轮;按照主减速器主动锥齿轮的支承型式及安置方法分为:悬臂式和跨置式;按照主减速器减速形式分为:单级减速、双级减速、双速减速、贯通式主减速器和轮边减速等。主减速器设计的好坏关系到汽车的动力性、经济性以及噪声、寿命等诸多方面。如何协调好各方关系、合理匹配设计参数,以达到满足使用要求的最优目标,是主减速器设计中最重要的问题。 关键词:中型客车主减速器圆锥齿轮
主减速器的设计 1、汽车的主要参数 车型 中型货车 驱动形式 FR4×2 发动机位置 前置、纵置 最高车速 U max =90km/h 最大爬坡度 i max ≥28% 汽车总质量 m a =9290kg 满载时前轴负荷率 25.4% 外形尺寸 总长L a ×总宽B a ×总高H a =6910×2470×2455mm 3 轴距 L=3950mm 前轮距 B 1=1810mm 后轮距 B 2=1800mm 迎风面积 A ≈B 1×H a 空气阻力系数 C D =0.9 轮胎规格 9.00—20或9.0R20 离合器 单片干式摩擦离合器 变速器 中间轴式、五挡 下面参数为参考资料所得: 发动机最大功率及转速 114Kw-2600r/min; 发动机最大转矩及转速 539Nm-1600r/min ; 主减速比 0i =4.44; 变速器传动比抵挡/高档 6.3/1 轮胎半径:型号为9.0R20,轮胎胎体直径为9.0英尺,轮辋直径为20英尺,所以半径为 ()m 48.02 4.522020.9≈?+?= r r 汽车满载时质量 14t 2、主减速器结构形式的确定 主减速器可以根据其齿轮类型、减速形式以及主、从动齿轮的支承形式的不
完整版工业机器人核心部件 谐波减速器
工业机器人核心部件-谐波减速器 晴星期二2009-03-24 00:18 csuzhm:作 者.
机器人驱动系统要求传动系统间隙小、刚度大、输出扭矩高以及减速比大,常用的减速机构有:1)RV减速机构; 2)谐波减速机械; 3)摆线针轮减速机构; 4)行星齿轮减速机械; 5)无侧隙减速机构; 6)蜗轮减速机构; 7)滚珠丝杠机构; 8)金属带/齿形减速机构; 9)球减速机构。 其中谐波减速器广泛应用于小型的六轴搬运及装配机械手中,下面介绍其工作原理。
以下内容摘自百度百科(稍有修改): 谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器。谐波齿轮传动(简称谐波传动),它是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动。 (一)传动原理 它主要由三个基本构件组成: (1)带有内齿圈的刚性齿轮(刚轮)2,它相当于行星系中的中心轮; (2)带有外齿圈的柔性齿轮(柔轮)1,它相当于行星齿轮; (3)波发生器H,它相当于行星架。 作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。 波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。波发生器是使柔轮产生可控弹性变形的构件。当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由. 啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器H相反方向的缓慢旋转。 在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以n 表示。常用的是双波和三波两种。双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。故为目前应用最广的一种。 谐波齿轮传动的柔轮和刚轮的周节相同,但齿数不等,通常采用刚轮与柔轮齿数差等于波数,即 z2-z1=n 式中z2、z2--分别为刚轮与柔轮的齿数。 当刚轮固定、发生器主动、柔轮从动时,谐波齿轮传动的传动比为
汽车主减速器设计
汽车主减速器设计 主减速器设计 3.2主减速器设计 321主减速器的结构型式 主减速器的结构型式,主要是根据其齿轮类型、主动齿轮和从动齿轮的安置方法以及减速型式的不同而异。 (1)主减速器齿轮的类型 在现代汽车驱动桥上,主减速器采用得最广泛的是螺旋锥齿轮和双曲面齿轮。在双级主减速器中,通常还要加一对圆柱齿轮(多采用斜齿圆柱齿轮),或一组行星齿轮。在轮边减速器中则常采用普通平行轴式布置的斜齿圆柱齿轮传动或行星齿轮传动。在某些公共汽车、无轨电车和超重型汽车的主减速器上,有时也采用蜗轮传动。 (2 )主减速器主动锥齿轮的支承型式及安置方法 在壳体结构及轴承型式已定的情况下,主减速器主动齿轮的支承型式及安置方法,对其支承刚度影响很大,这是齿轮能否正确啮合并具有较高使用寿命的重要因素之一。 现在汽车主减速器主动锥齿轮的支承型式有以下两种: 悬臂式 齿轮以其轮齿大端一侧的轴颈悬臂式地支承于一对轴承上。为了增强支承刚度,应使两轴承支承中心间的距离齿轮齿面宽中点的悬臂长度大两倍以上,同时比齿轮节圆直径的70%还大,并使齿轮轴径大于等于悬臂长。当采用一对圆锥滚子轴承支承时,为了减小悬臂长度和增大支承间的距离,应使两轴承圆锥滚子的小端相向朝内,而大端朝外,以缩短跨距,从而增强支承刚度。 (3 )主减速器从动锥齿轮的支承型式及安置方法 主减速器从动锥齿轮的支承刚度依轴承的型式、支承间的距离和载荷在支承之间的分布而定。为了增加支承刚度,支承间的距离应尽可能缩小。两端支承多采用圆锥滚子轴承,安装时应使他们的圆锥滚子的大端相向朝内,小端相背朝外。为了防止从动齿轮在轴向载荷作用下的偏移,圆锥滚子轴承也应预紧。 轿车和轻型载货汽车主减速从动锥齿轮采用无辐式结构并用细牙螺钉以精度较高
工业机器人RV减速机的机械原理
当我们在无限憧憬工业机器人时代的时候,你可曾知道,工业机器人最关键的机械结构之一RV减速机,到今天,中国仍然不具备设计和制造能力。“十二五”时期,国家“863”计划将其列入重点攻克的技术瓶颈。国内顶尖大学和科研机构几年攻关也只有论文,没有实物。 工业机器人所有核心零部件中,减速机最为关键。 工业机器人成本结构大致如下:本体22%、伺服系统25%、减速器38%、控制系统10%以及其他5%。简单拆分国内6轴工业机器人成本(总成本25万元),可以看出减速器和伺服电机两项成本接近13万元,主要以进口为主。 一、RV减速机的机械原理 德国人劳伦兹·勃朗于1926年创造性地提出了一种少齿差行星传动机构,它是用外摆线作为齿廓曲线的,这就是最早期的针摆行星传动,由于两个啮合齿轮其中之一采用了针轮的形式,这种传动也被称做摆线针轮行星齿轮传动。 RV传动一种全新的传动方式,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,而且因为具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。
第1减速部…正齿轮减速机构 输入轴的旋转从输入齿轮传递到直齿轮,按齿数比进行减速。这是第一减速部。 第2减速部…差动齿轮减速机构 直齿轮与曲柄轴相连接,变为第二减速部的输入。在曲柄轴的偏心部分,通过滚动轴承安装RV齿轮。另外,在外壳内侧仅比RV 齿轮数多一个的针齿,以同等的齿距排列。 如果固定外壳转动直齿轮,则RV齿轮由于曲柄轴的偏心运动也进行偏心运动。此时如果曲柄轴转动一周,则RV齿轮就会沿与曲柄轴相反的方向转动一个齿。这个转动被输出到第2减速部的轴。将轴固定时,外壳侧成为输出侧。 二、RV减速机对工业机器人的重要性 工业机器人第一关节到第四关节全部使用RV减速机,轻载工业机器人第五关节和第六关节有可能使用谐波减速机。重载工业机器人所有关节都需要使用RV减速机。平均而言,每台工业机器人使用4.5台RV减速器。2013年世界工业机器人销量18万台,需使用减速机90万台。 工业机器人的动力源一般为交流伺服电机,因为由脉冲信号驱动,其伺服电机本身就可以实现调速,为什么工业机器人还需要减速
货车车辆主减速器设计
摘要 在现代汽车驱动桥上,主减速器的功用是将输入的转距增大并相应降低转速,以及当发动机纵置时还具有改变转矩旋转方向的作用。单级主减速器通常由主动齿轮和从动齿轮组成。在双级主减速器中,通常还要加一对圆柱齿轮或一组行星齿轮。在轮边减速器中则常采用普通平行轴式布置的斜齿圆柱齿轮传动或行星齿轮传动。主减速器采用的最广泛的是螺旋锥齿轮和双曲面齿轮。在某些公共汽车和重型汽车上有时也选用蜗轮传动。 本文中,首先要确定主减速器齿轮型式为双曲面面齿轮和发动机最大转矩,主减速器减速比,变速器一档传动比。然后,进行驱动桥各个部分主要参数进行计算。最后对主、从动锥齿轮,差速器圆锥齿轮,半轴齿轮,全浮式半轴,驱动桥壳强度进行校核。 关键词: 主减速器;双曲面锥齿轮;差速器;半轴
ABSTRACT Nowadays, the main reducer, which on modern car driving axle, is used to increase the imported torque and correspond to decrease its speed, at the mean while, it also can change the direction of torque when engine is longitudinal. Single-stage reducer is usually composed of the main driving gear and driven gear. In main two-stage reducer, a spur gear or a group of planetary gear also included. In the wheel-side reducer, helical gears drive or planetary gear is adopted, which is laid of common parallel coaxial. spiral bevel gear gear and hypoid gears are broadly adopted by main reducer. Worm transmission is used by some buses and trucks. In the paper,ensure that the gear style of the main reducer is hypoid gear and the maximum engine torque firstly .Then calculate the main parameters of every components of the drive axle.Finally,check the strength of the main,driven bevel gear, cone planetary differential gear, axle gear and the whole floating half-axle . Key word: Main reducer; Hypoid gears; Cone planetary differential gear;Half-axle