Maxwell 2D 的一些说明
Maxwell 2D 的一些说明
一、 UDP 的简要说明
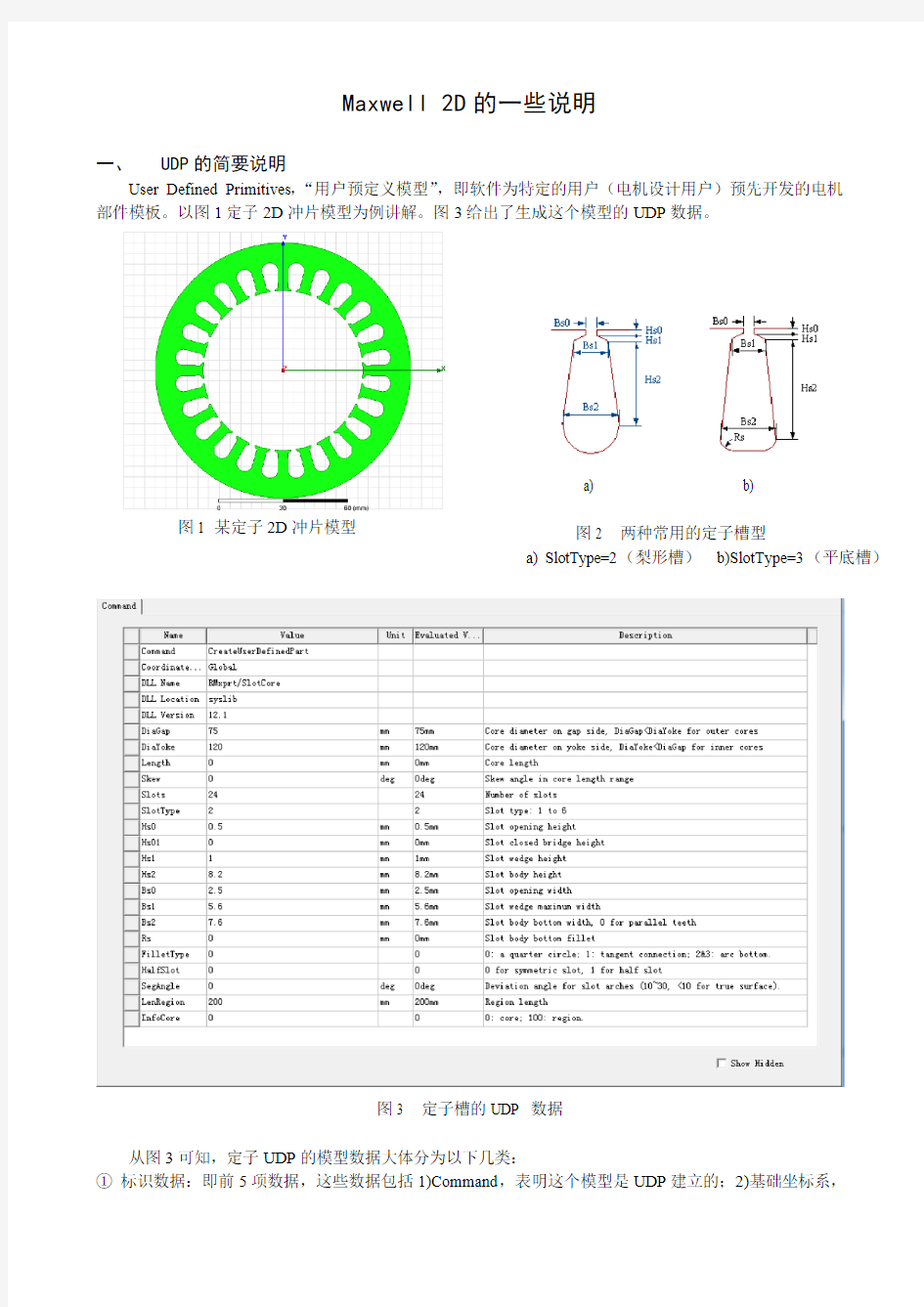
User Defined Primitives ,“用户预定义模型”,即软件为特定的用户(电机设计用户)预先开发的电机部件模板。以图1定子2D 冲片模型为例讲解。图3给出了生成这个模型的UDP 数据。
图1 某定子2D 冲片模型
图3 定子槽的UDP 数据
从图3可知,定子UDP 的模型数据大体分为以下几类:
① 标识数据:即前5项数据,这些数据包括1)Command ,表明这个模型是UDP 建立的;2)
基础坐标系,
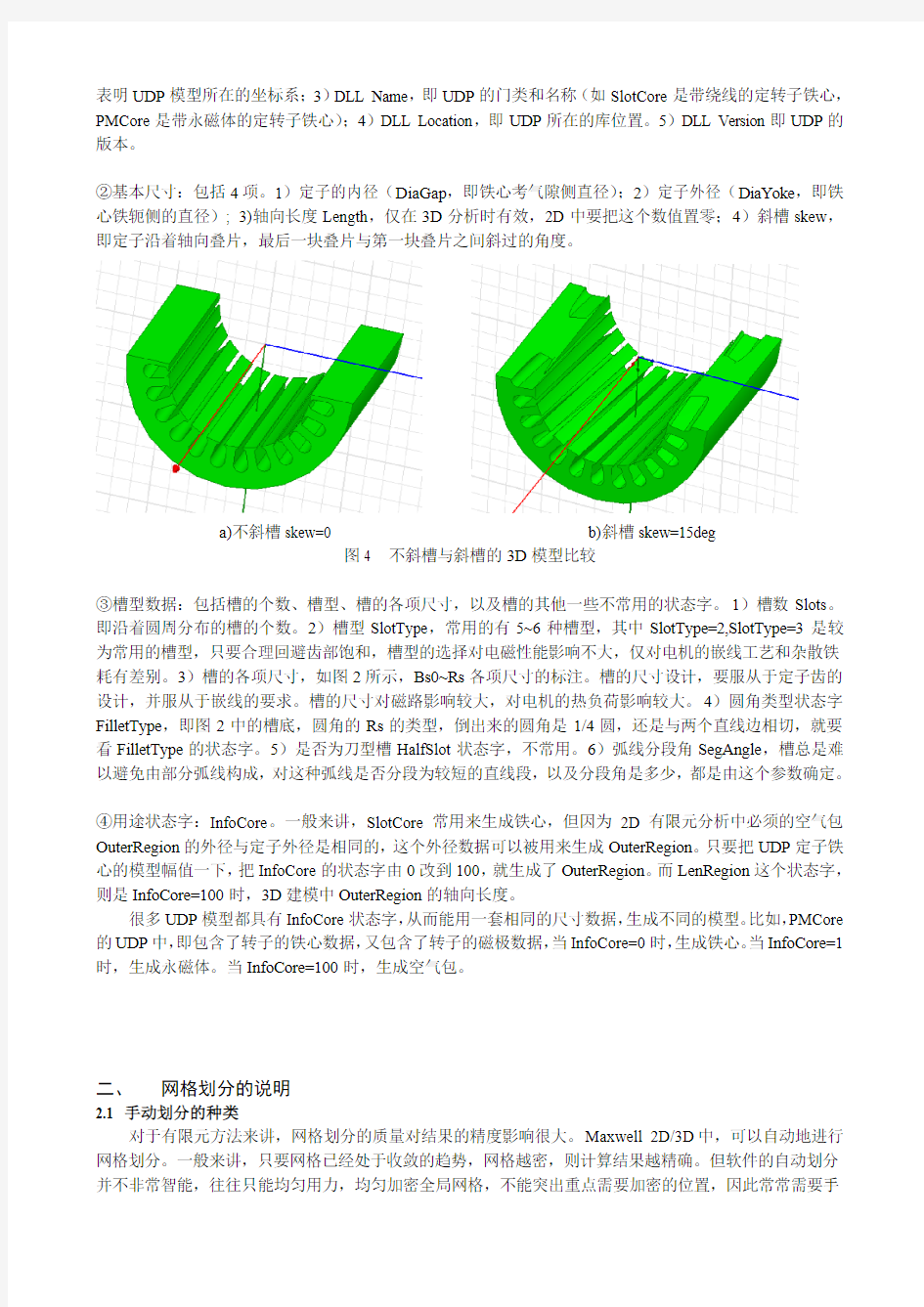
a) b)
图2 两种常用的定子槽型
a) SlotType=2(梨形槽) b)SlotType=3(平底槽)
表明UDP模型所在的坐标系;3)DLL Name,即UDP的门类和名称(如SlotCore是带绕线的定转子铁心,PMCore是带永磁体的定转子铁心);4)DLL Location,即UDP所在的库位置。5)DLL Version即UDP的版本。
②基本尺寸:包括4项。1)定子的内径(DiaGap,即铁心考气隙侧直径);2)定子外径(DiaYoke,即铁心铁轭侧的直径); 3)轴向长度Length,仅在3D分析时有效,2D中要把这个数值置零;4)斜槽skew,即定子沿着轴向叠片,最后一块叠片与第一块叠片之间斜过的角度。
a)不斜槽skew=0 b)斜槽skew=15deg
图4 不斜槽与斜槽的3D模型比较
③槽型数据:包括槽的个数、槽型、槽的各项尺寸,以及槽的其他一些不常用的状态字。1)槽数Slots。即沿着圆周分布的槽的个数。2)槽型SlotType,常用的有5~6种槽型,其中SlotType=2,SlotType=3是较为常用的槽型,只要合理回避齿部饱和,槽型的选择对电磁性能影响不大,仅对电机的嵌线工艺和杂散铁耗有差别。3)槽的各项尺寸,如图2所示,Bs0~Rs各项尺寸的标注。槽的尺寸设计,要服从于定子齿的设计,并服从于嵌线的要求。槽的尺寸对磁路影响较大,对电机的热负荷影响较大。4)圆角类型状态字FilletType,即图2中的槽底,圆角的Rs的类型,倒出来的圆角是1/4圆,还是与两个直线边相切,就要看FilletType的状态字。5)是否为刀型槽HalfSlot状态字,不常用。6)弧线分段角SegAngle,槽总是难以避免由部分弧线构成,对这种弧线是否分段为较短的直线段,以及分段角是多少,都是由这个参数确定。
④用途状态字:InfoCore。一般来讲,SlotCore常用来生成铁心,但因为2D有限元分析中必须的空气包OuterRegion的外径与定子外径是相同的,这个外径数据可以被用来生成OuterRegion。只要把UDP定子铁心的模型幅值一下,把InfoCore的状态字由0改到100,就生成了OuterRegion。而LenRegion这个状态字,则是InfoCore=100时,3D建模中OuterRegion的轴向长度。
很多UDP模型都具有InfoCore状态字,从而能用一套相同的尺寸数据,生成不同的模型。比如,PMCore 的UDP中,即包含了转子的铁心数据,又包含了转子的磁极数据,当InfoCore=0时,生成铁心。当InfoCore=1时,生成永磁体。当InfoCore=100时,生成空气包。
二、网格划分的说明
2.1 手动划分的种类
对于有限元方法来讲,网格划分的质量对结果的精度影响很大。Maxwell 2D/3D中,可以自动地进行网格划分。一般来讲,只要网格已经处于收敛的趋势,网格越密,则计算结果越精确。但软件的自动划分并不非常智能,往往只能均匀用力,均匀加密全局网格,不能突出重点需要加密的位置,因此常常需要手
动设置网格。
如图5所示,手动网格划分的类型,在Maxwell 2D中常有这么几类:1) On Selection,即模型边缘划分。2)Inside Selection,即模型内部划分。3)Surface Approximation,表面逼近。
图5 网格划分的选项
1)Inside Selection是最简单常用的网格划分方法,很多电机模型中,只用到这一种划分方式,即可得到比较满意的结果。它划分的实体,内部网格大小是基本均匀的,需要加密的磁场位置,只需要建模时单独把那部分实体割分出来即可单独设置增加密度。
2)On Selection使用较少,它仅决定实体边缘上的网格三角形的数量或边长,对实体内部无效。Inside Selection和On Selection的主要区别可由图6看出。图6中两个划分的设置中,三角形边长的限制值是一样的,只不过是一个限制在了实体的内部,一个仅限定在了实体的边缘上。
a) Inside Selection b) On Selection
图6 内部划分和边缘划分的区别
3)Surface Approximation使用较少,可以参考《Ansoft 12在工程电磁场中的应用》中的有关内容,对于实体中复杂曲线边缘的网格进行优化。
2.2 网格划分的原则
除了要了解这几种手动网格的类型,还要知道如何在实体上进行网格刨分的技巧。因此,要把握这几点:
1)同一个模型中,不同材料的实体的网格刨分的疏密程度是不相同的。这是因为不同实体的材料不
同,因此磁导率也不同,在同一磁路中的磁压降也不同。而2D有限元的场分布都是由磁位来直接求得的,因此,磁位变化大的地方网格要密,磁位变化小的地方网格要系数。
2)有时候,相同磁导率的材料,网格刨分也不相同。比如“气隙”与“定子槽”的材料都是空气,但是因为气隙中的磁密很高,而定子槽中基本没有磁场,所以,定子槽内的网格可以很稀疏。再比如,对于凸极电机,d轴和q轴的气隙磁密不同,因此两个位置的网格密度也可以不同。
3)对于层次上重叠的模型,网格划分有一个特点,小面积模型居于上层,因此它的网格优先级最高。大面积模型的网格优先级低,只有没被小面积模型覆盖的地方,才使用作为背景底层的大面积模型的网格设置。
4)高密度网格和低密度网格的衔接的地方,网格密度是渐变的,可衔接的,因此,大大简化了人为控制网格的难度。
2.3 网格划分例子
举个例子来说明网格划分。图7所示8P12S的永磁电机。其定子槽和内空气包(InnerRegion)单独建模(图8),并单独划分网格密度,目的是在不影响其他实体模型网格刨分的基础上,降低这两处的网格密度,在不影响精度的情况下,减少工作量。在这个模型上,仅用Inside Selection单一的划分方法进行刨分。
图7 原型电机8 “定子槽”和“内空气包(InnerRegion)”单独建模的模型
网格刨分遵循以下的规则:
1)气隙。多数电机的气隙长度在1mm左右,因此气隙网格长度常为0.8mm~1.5mm,即把气隙网格分成1~2层。例子中计划把气隙网格分成至少4层,以精确刻画气隙、磁极边缘、定子槽口的磁场分布。
该电机的最小气隙是0.75mm,因此分让最小气隙两层的话,经验上讲,应该使网格的边长为层厚的sqrt(3)倍,网格最大三角形边长应该是略大于sqrt(3)*(0.75/2)=0.65mm,而若是分4层,最大三角形边长应该是介于sqrt(3)*(0.75/4)=0.33mm和0.65mm之间。因此,定义气隙内部的最大网格长度为0.4mm。2)硅钢片。硅钢片的磁导率不饱和时是空气的几千倍,因此,网格可以比空气中稀疏很多。但是硅钢片仍有局部饱和现象,饱和时(1.5~1.8T),dB/dH就比空气大不了多少倍了。因此,一般气隙网格密度在1mm左右的电机,铁心硅钢片的网格密度常设定在3mm~20mm之间。以实现磁压降与网格密度的协调。因此,硅钢片的网格划分为4mm。
3)永磁体。永磁体的内磁阻的磁导率基本上和空气相等,因此,可以采用与一般气隙一样的网格划分,这里是1mm。
4)转轴。转轴用不锈钢,磁导率也和空气相同,但它不像永磁体那样会有磁场经过。因此,它可以划分很稀疏的网格,而不影响结果。其内部网格限制为8mm。
5)定子槽和交轴气隙。定子槽不走磁场,网格可以稀疏,为4mm。交轴气隙被InnerRegion包围,并且减去了各个永磁体、转子铁心和转轴,交轴气隙内磁密稍低,不需要气息中0.4mm那么小而密的网格,其边长限制为1mm即可。
针对以上规则的网格长度限制统计如下表所示:
表1 网格长度限制统计
网格名 包含模型 三角形最大边长(mm)
Length_Inside_InnerRegion InnerRegion 1
Length_Inside_OuterRegion&Band
OuterRegion, Band
(代表气隙的高密度网格)
0.4
Length_Inside_RotorCore RotorCore 4 Length_Inside_Shaft Shaft 8 Length_Inside_Slots Slots 4 Length_Inside_StatorCore StatorCore 4 Length_Inside_Mag Pole1~Pole8 1
软件自动刨分和手动刨分的效果如图9和图10所示。可以看出,手动刨分的网格合理很多。
图9 自动刨分图10 手动刨分
图11 手动刨分的局部(看交直轴下网格密度的不同)
三、激励条件和边界条件等问题
3.1 激励条件
激励条件即为电源的激励。在静态场和瞬态场中,激励条件的设置是不同的。
3.1.1 静态场电源激励
图12给出了静态场的激励条件设置对话框。注意数值上填的实际上是电流的“安匝数”,即电流与匝数的乘积。电流激励的正参考方向为+z轴,可以通过“安匝数”的正负号定义方向,也可以通过图中Ref. Direction的Positive和Negative定义方向,对场分布没有影响。但需要注意,Ref. Direction又代表了串联方向,因此,即使场分布图正确了,如果绕组串联方向取反了,得到的电感仍然不正确。
图12 静态场的激励条件设置对话框
3.1.2 瞬态场电源激励
瞬态场施加激励需要先设置线圈,图13给出了瞬态场激励线圈的设置对话框。设置好了线圈才能进行绕组分相。实际上这只是概念建模,这里的Coil,往往只是一个“极相线圈”两个直线棒的其中之一。只要在图13中定好线棒的极性Polarity,即可确定其在相绕组中的串联方向,而串联顺序完全不影响2D 分析的电磁性能(因此不必在乎哪根线棒与哪根线棒串联,只要他们同属于一相绕组即可)。
图13 瞬态场的激励条件设置对话框
线圈棒要加入绕组中,才能构成一相。如图14所示。
图14 线圈棒与相绕组之间的归属关系
构成了绕组,还没有加激励。实际上,绕组可以有三种激励形式:1)电流源。2)电压源。3)外电路。
1)瞬态场电流源如图15所示。电流是磁场的本质来源,因此知道电流就可以唯一确定磁场了。注意分股导线一般要选择Stranded选项,不然线圈棒的匝数只能是1。还要注意并联支路数选项。
图15 瞬态场电流源选项图16 瞬态场电压源选项
2)瞬态场电压源如图16所示。由电压得到电流,才能最终得到磁场。因此瞬态场的电压源必须要有绕组电阻和漏抗参数,才能计算得到电流。此外,还要知道电流的初始值。
3) 外电路的形式如图17所示。有限元里的绕组,以集中参数的形式,添加到了电路中。使用外电路,可以实现一定程度上的场路耦合。可以观察复杂控制情况下的电机磁场和参数的变化情况。
图17 瞬态场绕组接入外电路
3.2 边界条件
3.2.1 矢量磁位边界条件
最简单的边界条件。一般都是设为0weber/m,所有磁力线靠近它后,都与之平行。
图18 矢量磁位边界条件
3.2.2 周期性边界条件(主从边界条件)
主从边界条件之间正负号的判断依据。“从边界条件”实际上是“主边界条件”的周期性旋转,看“主
边界”旋转到“从边界”上,径向或法向磁矢量,是否改变了符号。
图19 主从边界条件
3.2.3 对称边界条件
当不计电枢反应时,空载磁场是轴对称的。此时,电机的空载模型常常可以用对称边界条件来减少求解区域大小。如图20 a)中的1/8模型,可以进一步简化为图20b)中的1/16模型。对称边界条件的对话框如图21所示,其中,1/16模型的水平边界,应该选Odd(Flux Tangential),斜边界应该选Even(Flux Normal)。
a) 1/8模型b)1/16模型
图20 用对称边界条件简化模型
图21 对称边界条件对话框
四、求解设置的注意问题
4.1 求解设置
1)静态场求解设置。
如图22所示,General选项中注意收敛设置:①最大求解次数;②能量泛函的百分比误差。只要满足二者之一的条件,就完成计算,输出结果,不然加密网格再算。Convergence选项中,有每一步网格加密的数量30%,最小计算步数,最小收敛步数。
2)瞬态场求解设置。
如图23所示,瞬态场求解器需要注意两个参数。即“求解时长”和“求解步长”。为了合理选择这两个参数,要清楚求解波形的周期是多少,那么求解时长一般取1或2倍的波形周期。求解步长,则要保证每一个波形周期内,有20~50个采样点,或者更高。
图22 静态场求解器常用求解设置
图23 瞬态场求解器常用求解设置
练习题:
1. 简述一下UDP 中最后一项参数(InfoCore/InfoCoil)的含义。试着画出梨形槽、平底槽,并标出尺寸符号。
2. Maxwell 2D 手动划分网格有哪几种方法,哪种最常用?试简述划分网格的基本原则。
3. Maxwell 2D 中,静态场和瞬态场中的激励条件,电枢导体匝数是如何体现的?极性是如何体现的?
4. Maxwell 2D 中,瞬态场的相绕组,其串并联是如何体现的?
5.Maxwell 2D中,瞬态场的电源激励分哪几种?集中电源激励之间有什么不同?
6. 什么是矢量磁位边界条件?什么是周期性边界条件?什么是对称边界条件?他们在Maxwell 2D中是如何实现的?瞬态场中为何要设置“对称数”,如何设置对称数?
7. 简述在Maxwell 2D 瞬态场中,如何设置求解的时长和步长。以一个6极36槽,3000rpm的永磁内转子电机为例,如何设置时长和步长,得到比较完美的齿槽转矩波形?
8. 实践手动网格划分的方法。