面向对象影像分析简要介绍--以eCognition为例

面向对象影像分析简要介绍
——以eCognition软件为例
前言
遥感影像的光谱,空间,时间分辨率不断提高,为开展各类遥感应用提供各种数据。但在遥感数据获取能力增强的同时,也使得丰富的影像数据得不到充分利用和挖掘,从而出现“数据丰富,信息贫乏”的困境。如何快速自动准确地从遥感影像中提取出能满足某种应用的专题信息,是我们亟待要解决的问题。
随着面向对象思想的风行以及面向对象影像分析技术的不断成熟,使得我们从高分影像中提取专题信息变得更加便捷。尤其是一些商业的面向对象影像分析软件的出现,如eCognition,Feature Analysis。eCognition软件的口号就是“Exploring the soul of imagery(发掘影像最大潜能)”。本论文旨在从eCognition软件了解面向对象影像分析的相关思想和技术。希望通过探究eCognition软件背后的思想以及技术原理,如面向对象,多尺度分割,模糊分类等,为高分辨率遥感影像的特征描述以及建模带来一些启发。
1.面向对象
面向对象的思想是针对具体应用,将问题处理对象(逻辑概念上或物理概念上)划分为合适粒度(即对象)来进行处理,并封装其相应的属性以及行为,同时为了更好的复用以及扩展,维护更新,使其具有继承,多态,聚合等特性。
1.1对象
对象是指状态和行为的集合体,在物理实现上表现为数据和操作的集合,逻辑上表现为有职能的实体。它是用来描述现实世界中的物理概念或逻辑概念上的物体。比如人就是一个对象,它有性别,年龄,姓名等属性,人有吃饭睡觉等行为。武汉大学也是一个对象,它有名称,学院机构,学校历史等属性,也有教学科研等行为。不同的是人是物理概念上的对象,武汉大学是逻辑概念上的对象。
1.2抽象性,封装性,继承性
抽象是抽取出我们所感兴趣的部分,用这些少量特征来描述一个事物。封装性是对事物的数据和操作进行封装,即对其状态和行为进行封装。继承特性是对事物属性和行为的继承。
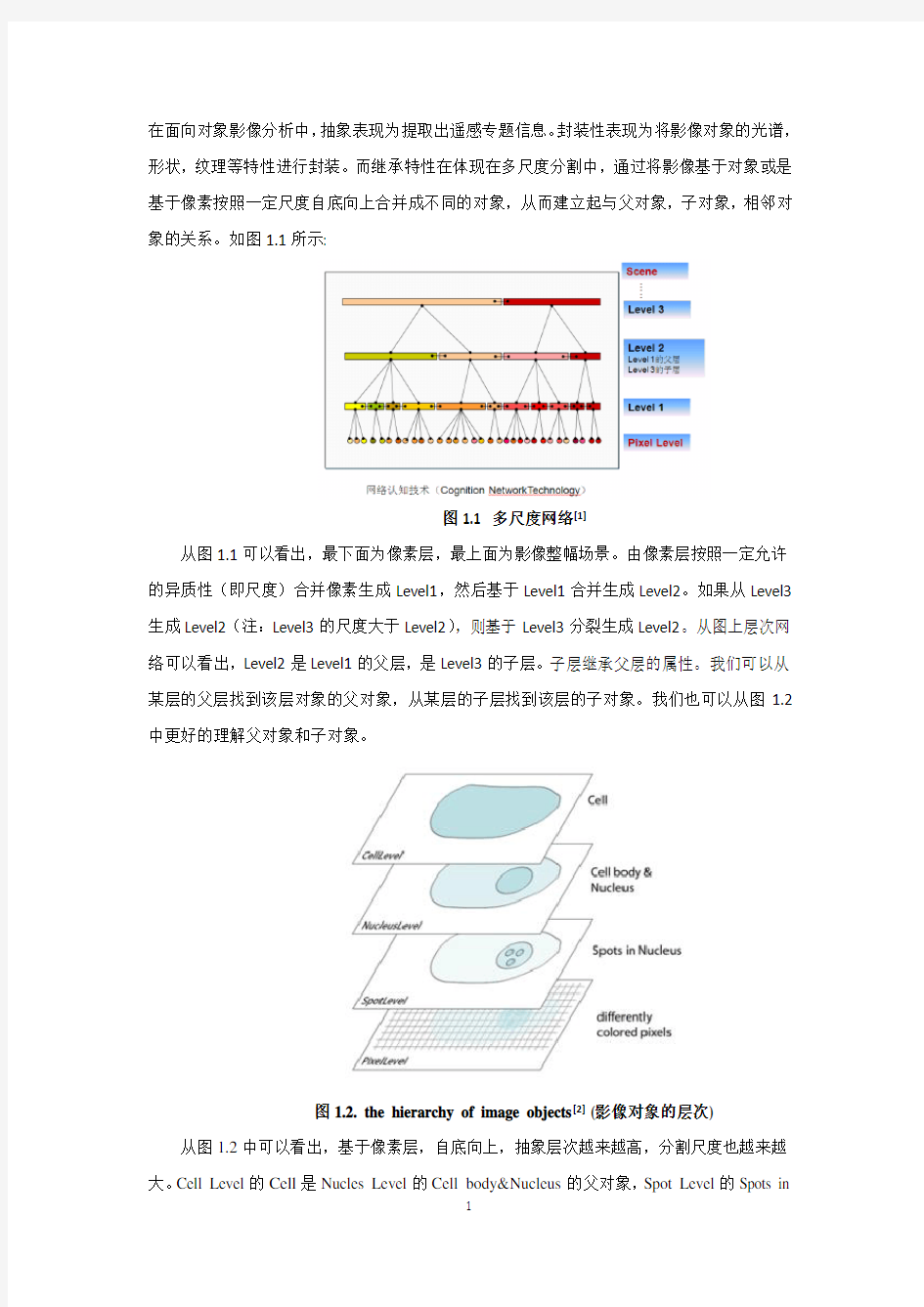
在面向对象影像分析中,抽象表现为提取出遥感专题信息。封装性表现为将影像对象的光谱,形状,纹理等特性进行封装。而继承特性在体现在多尺度分割中,通过将影像基于对象或是基于像素按照一定尺度自底向上合并成不同的对象,从而建立起与父对象,子对象,相邻对象的关系。如图1.1所示:
图1.1 多尺度网络[1]
从图1.1可以看出,最下面为像素层,最上面为影像整幅场景。由像素层按照一定允许的异质性(即尺度)合并像素生成Level1,然后基于Level1合并生成Level2。如果从Level3生成Level2(注:Level3的尺度大于Level2),则基于Level3分裂生成Level2。从图上层次网络可以看出,Level2是Level1的父层,是Level3的子层。子层继承父层的属性。我们可以从某层的父层找到该层对象的父对象,从某层的子层找到该层的子对象。我们也可以从图1.2中更好的理解父对象和子对象。
图1.2. the hierarchy of image objects[2] (影像对象的层次) 从图1.2中可以看出,基于像素层,自底向上,抽象层次越来越高,分割尺度也越来越大。Cell Level的Cell是Nucles Level的Cell body&Nucleus的父对象,Spot Level的Spots in
Nucleus是Nucles Level的Cell body&Nucleus的子对象。
对象之间的层次关系可以很好的反映目标与背景的关系以及目标的上下文信息,这样一定程度可以避免同物异谱,异物同谱的现象。
1.3面向对象影像分析
面向对象的遥感影像分析的基本原理是根据像元的形状、颜色、纹理等特征,把具有相同特征的像素组成一个影像对象,然后根据每一个对象的特征对这些影像对象进行分类。面向对象影像分析有两个独立的模块:对象生成与信息提取,即分割与分类。影像分割是首先基于对整个影像进行尺度空间的构建,然后再根据分割参数提取出不同的对象多边形。分类是根据分割得到的对象的属性(如光谱特征,形状特征,纹理特征等)赋予其语义信息,也就是赋予其属于哪一类地物。
在易康软件中将影像定义为:影像并非由单个像素来代表,而是由包含重要语义信息(如光谱特征,形状特征,纹理特征等)在内的影像对象以及他们之间的相互关系(父子对象之间的关系,相邻对象之间的关系)构成[2]。
易康软件最大的特色采用面向对象的遥感影像分析,首先将影像按照一定尺度分割成一个个对象,然后对每一个对象封装其光谱,形状,纹理等特性,并且建立该对象与其相邻对象,父对象,子对象之间的关系。其主要体现如下:
如图1.3所示:通过分类将一副影像抽象成几类地物的信息。
图1.3. 高分影像面向对象分类(抽象性)
图1.4. 分类体系图1.5. 影像对象信息从图1.4 可以看出,首先将图像在level1上分割成分人工和人工类,然后在level2上让非人工1继承非人工,非人工1包括草地1和湖泊1。同理在level3上人工1继承人工的属性,人工1包括道路1和房屋1,并且在属性设置道路继承道路1,房屋继承房屋1,湖泊继承湖泊1,草地继承草地1,这个图中,人工与人工1是is-of的继承关系,人工是人工1的父对象,草地1与非人工1是has-of的聚合关系。
从图1.5可以看出对象的各波段的光谱信息以及形状信息封装在对象信息中,我们可以根据具体应用选择不同的特征信息封装到影像对象中。
面向对象影像分析相对于基于像素的影像分析,具有以下优势[1]:
(1)分类特征得到扩展
对象不仅继承像元的光谱特性,还具有形状特性以及层次关系等分类特征,从而使得对象分类特征得到扩展,使得分类结果精度更高。
(2)运行效率得到提高
由成千上万个像素到几千个对象,计算机处理的数目大大减小,从而使得运行效率得以提高。
(3)分类精度得到保障
根据异质性最小原则分割出来的对象有自己的形状特征和边界轮廓,能够更加准确的反映地物的真实边界、轮廓信息,从而根本上减少错分、漏分的几率,同时能有效避免椒盐噪声,提高分类精度。
(4)分割尺度可控
针对不同地物目标的形状特征以及提取需求,可以灵活设置各种尺度,进行多尺度分
割。
2.多尺度分割
对象提取是面向对象思想的重要前提。故首先需要根据影像的光谱等特性将影像分割成互不重叠的区域作为影像分析处理的对象,即对影像进行图像分割。易康软件主要提供了棋盘,四叉树以及多尺度分割算法。由于棋盘算法和四叉树算法不常用,本论文对棋盘算法以及四叉树算法进行简要介绍,重点介绍易康面向对象的一大特色——多尺度分割。
2.1图像分割
图像分割就是把图像空间划分成若干个具有某些一致性属性的不重叠区域并提取出感兴趣的目标的技术和过程,而对图像空间的划分则建立在区域的相似性和非连续性这两个概念上。易康软件提供的是先将影像按一定算法切割成一个个同质区域作为影像对象,再基于影像对象进行处理。易康提供的影像分割的算法有棋盘算法,四叉树算法,多尺度算法。
棋盘算法是基于像素级或是影像对象级将影像切割或合并成规则格网。如下图2.1所示:
图2.1. 尺度为20进行棋盘分割得到的结果[3]
四叉树算法是基于像素级或是对象级将影像切割或合并成不同大小的同质方块区域。分割效果如下图2.2所示:
图2.2. 尺度为40进行四叉树分割得到的结果[3]
多尺度分割基于异质性最小区域合并原则所生成的影像对象,对于Lena图像尽享多尺度分割结果如图2.3所示:
图2.3. 多尺度分割图像得到的结果(尺度: 10,形状权重: 0.1,紧致度权重: 0.5)[3]
2.2多尺度分割
尺度,从宏观的角度看,其是指分析问题过程中,待处理对象粒度大小;从微观的角度看,如EC中的尺度是指区域合并的异质性阈值。区域异质性是指区域内部各特征(如光谱特征,形状特征等)的差异性,与同质性相反。在EC中是将影像看作一个个包含重要语义信息的对象和对象间的关系构成。所以我们首先需要将影像分割成一块块区域作为对象。分割的准则是基于对象内异质性最小,对象间异质性最大原则。也就是基于区域异质性最小即尺度进行分割。
2.2.1基本原理
高分辨率遥感影像中丰富的地物目标与空间语义信息必须在多尺度下才能充分表达和描述。多尺度分割算法的目标是:在指定的与感兴趣的地物目标或空间结构特征相对应的尺度下,将影像分割成高同质的、互相连结的不同影像区域,与感兴趣的地物目标或空间结构特征相对应。多尺度影像分割采用异质性最小的区域合并算法,其中像元的合并开始于影像中任意一个像元。先将单个像元合并为较小的影像对象,再将较小的影像对象合并成较大的多边形对象。
2.2.2 异质性计算[4,5]
(1) 区域异质性
对象内部的差异性主要考虑光谱特征和形状特征。故区域异质性f 包括光谱异质性和形状异质性两方面,其计算公式为:
(1)color color color shape f w h w h =+- (Ⅰ)
(Ⅰ)式中,color w 为光谱权重,color h 表示对象S 光谱异质性,shape h 表示对象S 形状异质性。1color w -表示形状权重。
(2) 光谱异质性
光谱异质性是用来表示对象S 内部各像素之间的光谱差异性,它是通过对象S 各个波段光谱值标准差的加权和来表示。
1N color c
c c h w σ==∑ (Ⅱ)
(Ⅱ)式中,c w 表示第c 波段光谱的权重,c σ表示第c 波段光谱值的标准差。
(3) 形状异质性
形状异质性是用来表示对象S 形状的差异性。通过紧致度和光滑度加权和来描述对象S 的形状特征。对象S 的紧致度是用来描述对象S 的饱满程度,即接近正方形和接近圆形的程度。对象S 的破碎度是用来描述对象S 边界的破碎程度。
(1)shape compact compact compact smooth h w h w h =+- (Ⅲ)
(Ⅲ)式中,compact w 表示紧致度的权重,compact h 表示紧致度,smooth h 表示光滑度。 以下是紧致度和光滑度的计算:
/compact h l = (Ⅳ)
/s m o o t h h l b
= (Ⅴ) (Ⅳ)式中,l 表示对象S 的边界所包含的像素个数,用来表示对象S 轮廓边界的长度;n 表示对象S 内部包含的像素个数,用来表示对象S 的面积。用对象S 多边形的周长比上多边形的半径衡量对象S 区域的饱满程度,若对象S 是一个正方形,紧致度刚好为4。该值越小,说明越饱满,越大,说明越狭长。
(Ⅴ)式中,l 表示对象S 的边界所包含的像素个数,用来表示对象S 轮廓边界的长度;b 表示对象S 最小外包矩形的边界长度。用对象S 的边界周长比上对象S 近似边界的长度表示光滑度,衡量边界的破碎程度,若是该值越大,说明对象S 的边界越破碎。
(4) 合并区域的异质性计算
若将区域S1以及区域S2合并后得到的S ’,计算S ’的区域异质性。S ’的区域异质性为新合并区域的光谱异质性以及形状异质性的加权和。
''
'
(1)color color color shape f w h w h =+- (Ⅵ)
(Ⅵ)式中,color w 为光谱权重,'
color h 、'
shape h 分别为合并区域后的对象S ’的光谱异质
性和形状异质性。
合并区域S ’的光谱异质性'
color h 和形状异质性'
shape h 计算如下:
'
''12121(())N
color c c c c c h w n n n σσσ==-+∑ (Ⅶ) (Ⅶ)中c w 表示第c 波段光谱的权重,'c σ,1c σ,2c σ分别表示第c 波段区域S ’,S1,
S2的光谱值的标准差。'
n ,1n ,2n 分别表示区域S ’,S1,S2内部所包含的像素个数。 '
'
'
(1)shape compact compact compact smooth h w h w h =+- (Ⅷ)
(Ⅷ)式中,compact w 表示紧致度权重,'
compact h ,'
smooth h 分别表示合并区域S ’的紧致度
和光滑度。
'
''1122/(//compact h n l n l n l = (Ⅸ)
'
'''111222/(//)smooth h nl b n l b n l b =-+ (Ⅹ)
(Ⅸ),(Ⅹ)式中,'l ,1l ,2l 分别表示对象S ’,S1,S2的边界包含像素个数,'
b ,1b ,2b 分别表示对象S ’,S1,S2的最小外包矩形的边界所包含像素个数。'n ,1n ,2n 分别表示
区域S’,S1,S2内部所包含的像素个数。
2.2.3算法步骤
基于异质性最小区域合并算法(FNEA算法),采用自底向上的区域增长法,即基于像素层自底向上区域合并完成对象提取。具体策略为:从像素层开始,将相邻区域特征相似的像素聚合成小影像区域,然后基于小影像区域将相似的小影像区域,基于异质性最小原则合并成大的影像区域,每一次合并,都计算两区域合并后区域的异质性是否大于尺度,若大于尺度,则不对该两区域进行合并,若小于尺度,则进行合并,生成新的更大的影像区域。下一次合并再上一次合并的结果的基础上进行合并,直至合并后的区域的异质性都大于尺度,或所有的区域都合并完毕,则停止合并。具体流程如图2.4所示。
图2.4. 基于异质性最小区域合并算法流程图[4]
2.2.4最优尺度分割
为了保证遥感影像信息提取的精度,再进行影像分割的时候,我们应该选择一个最佳尺
度。若尺度太大,则会出现分割不完全的现象;若尺度太小,则会出现分割破碎的现象。最优尺度应该表现为对象大小与地物目标轮廓相当,大小接近,对象多边形即不能太破碎,也不能边界模糊,且光谱变异情况较小。
最优尺度的确定方法是目前研究的一个重要方向,许多学者为此做了大量的研究实验提出了一些最优尺度的确定方法,如黄慧萍利用最大面积法对地物的最优尺度进行计算,取得较理想的结果。高伟等提出用遗传算法优化分割尺度参数来选择最优尺度进行分割。在易康中可以通过不断尝试不同尺度对影像进行分割,比较分割结果,看哪一尺度分割提取出的对象更加接近地物目标的真实轮廓,即选择该尺度作为该地物提取的最优尺度。
2.2.5易康软件中的多尺度分割
图2.5是易康软件多尺度分割参数设置对话框,从图中可以看出我们需要设置尺度参数(Scale parameter),形状特征权重(Shape),则光谱权重为1- Shape。紧致度权重(Compatness),则光滑度权重为1- Compatness。第一次分割只能选择基于像素合并,后面的分割可以基于像素层或是基于对象层进行自底向上合并或是自顶向下分割。
图2.5. 易康多尺度分割参数设置
易康尺度参数选择原则[5]:
(1)尽量以最大的可能分割尺度来区分不同的影像区域获得影像对象(在满足必要的精度条件下尽可能使用大尺度)
(2)在满足必要的形状标准的前提下尽可能采用颜色标准。原因是影像数据中最重要的信息是光谱信息,形状标准的权重太高会降低分割结果的质量。
(3)对于大型地物(如河流)采用大的尺度,对于小型地物(如房屋)采用小的尺度。
(4)对于形状饱满的地物(比如房屋),设置较大的紧致度权重;对于边界光滑的地物(比如道路),设置较大的光滑度参数。
3.模糊分类
3.1基本思想
模糊分类是根据对象的分类特征赋予其归于某类的隶属度,即模糊化的过程。然后进行模糊规则推理,将各类特征隶属度组成隶属度元组,最后进行反模糊化的过程,即根据对象的隶属度元组将其归于某类目标地物。一种方法是最大隶属度原则识别法,取最大隶属度的那一类,一种是接近原则识别法,取与样本隶属度最接近的隶属度的那一类。
3.2算法步骤
依据模糊推理原则,基于影像和特征规则进行分类的步骤[6]如图3.1所示,具体包括:1)确定分类的类别,并设定满足分类条件的最小隶属度值分类阈值。
2)建立分类知识库,根据地物的特征值的分布情况,确定隶属度函数及其模糊规则组合方式。
3)将地物特征模糊化,对于每个目标类根据每个对象的特征值,确定隶属度函数并求出其隶属度。
4)进行模糊规则处理,利用选择好的规则组合,计算最终的隶属度元组。
5)利用反模糊化处理对像元进行归类。如果某个对象属于任何类的隶属度都小于步骤(1)中设定的阈值,则指定为未分类。
6)进行分类精度评价,如果分类结果不理想,重复(2)~(5)步直到得到较好分类结果后结束。
图3.1. 模糊分类流程图[6]
3.3易康软件中的模糊分类
在易康软件中,模糊分类是基于分割的基础上,采用面向对象模糊分类。首先对影像分割,然后确定分类体系以及分类特征知识库,接着将分类特征通过隶属度函数进行模糊化,并通过模糊规则逻辑计算获得隶属度元组,最后基于隶属度最大识别原则对各对象进行分类。图3.2体现了分类特征模糊化的过程,根据分类特征的分布情况,选择合适的隶属度函数对分类特征进行模糊化。图3.3体现了分类特征模糊规则逻辑关系,通过将各分类特征模
糊规则进行逻辑运算,得到隶属度原则从而进行反模糊化分类。
图3.2. 隶属度函数模糊化分类特征对话框
图3.3.分类特征逻辑组织图
4.常用分类特征介绍
特征是用来描述目标的重要属性,是影像分析和信息提取的主要依据。遥感信息提取实质是将影像特征相似的聚合在一起归为一类。所以分类特征的建模与描述就显得非常的重要。如图4.1所示,常用的遥感影像分类特征有光谱特征,形状特征,纹理特征等。在易康软件中采用多尺度分割,从而建立了各对象之间的关系。在eCognition中,提供了丰富影像对象特征(如图4.2所示),我们可以针对目标地物的特征,选择合适的分类特征,同时我们可以在Feature View中查看各类特征值所生成的图像,从而选择最能区别出某类地物的分
类特征。本论文主要介绍常用的光谱特征和形状特征以及纹理特征。
图4.1.影像对象特征组织图[6]
图4.2.分类特征体系
4.1光谱特征[3]
光谱特征描述对象的光谱信息,是由真实的地物和成像状态所决定的光学物理属性,与对象的灰度值相关,包括影像对象的均值、方差、灰度比、亮度等特征。
(1)对象S的均值Mean
用第k波段对象S中包含所有像素光谱值的平均值表示对象S第k波段的光谱均值mean.
式中,()k c S 表示第k 波段对象S 光谱均值,#S 表示对象S 的面积(即对象S 包含的像素个数),(,)k c xy 表示对象S 内像素(x,y)第k 波段的光谱值。
(2) 对象S 的亮度Brightness
用对象S 各个波段的光谱均值的加权平均作为对象S 的亮度。
式中,()k c S 表示第k 波段对象S 光谱均值,B k w 表示第k 波段的权重。B
w 表示各个波段的权重和。
(3) 对象S 的标准差StdDev
求第k 波段对象S 包含的各像素的光谱标准差。
式中,(,)k c x y 表示对象S 内像素(x,y)第k 波段的光谱值,#S 表示对象S 的面积。
4.2 形状特征[7]
形状特征反映了对象S 的形态特征,如对象S 对应多边形的周长,面积,长宽比等,在考虑光谱特征的同时,考虑形状特征,一定程度上可以避免“同物异谱,异物同谱”的现象。
为了更好的描述对象的形态特征,故引入对象像素位置(x,y)的协方差矩阵。eCognition 中提供的许多形状特征都是基于构成影像对象的像素的空间
分布统计之上的。eCognition 使用协方差矩阵作为统计处理的
核心工具。
()()()()Var X Cov XY M Cov XY Var Y ??=????
X=构成影像对象的所有像素的x-坐标
Y=构成影像对象的所有像素的y-坐标
通过协方差矩阵可以反映对象内部各像素的空间分布情况。
注意:对于比较紧致(饱满)的对象,采用近似边界框(最
小外包矩形)的方法来描述该对象的形态特征比较好,而对于狭长的或曲线的影像对象来说,采用协方差矩阵以及子对象来描述对象形态特征较好。
图4.3. 对象S 几何特征图示
(1) 对象S 的周长,面积
对象S 的周长表示对象S 的边界所包含的像素数,对象S 的面积表示对象S 内部所包含的像素数。如图4.3所示,对象S 的周长为对象S 的红色边界的长度,对象S 的面积是对象S 蓝色区域所包含的像素个数。
(2) 近似边界周长
对象S 的最小外包矩形就是其近似边界,如图4.3所示,青色矩形的边界所包含像素个数是对象S 的近似边界周长。
(3) 长宽比
计算影像对象的长宽比有两种方法来进行描述。
a . 长宽比等于协方差矩阵的特征值的比值,最大的特征值作为比值的分子,次大的特
征值做为分数的分母。
1122(),()()()
eig M l eig M eig M w eig M γ==> b . 长宽比也可以用边界框来近似表示。
22((1))l a f b w A
γ+-== 式中,a ,b 表示近似边界的长和宽。A 为对象的面积。f 表示权重。
(4) 长度,宽度
l
w =上式中l ,w 分别表示对象所对应多边形的长度和宽度。A 为对象的面积。γ表示长宽比。
(5) 紧致度
在异质性最小区域合并算法中,基于近似边界对对象S 的紧致度提供了一种计算方法,而在此基于协方差矩阵提供另外一种紧致度的计算方法。
compact h = 该参数用来描述影像对象形状的饱满程度。在像素栅格的图像中理想的紧致形状是一个正方形。一个影像对象的形状越接近正方形,该值越高。
5.易康软件应用
易康软件最初主要应用在医学图像处理方面,后来应用到遥感影像专题信息提取。随着遥感技术应用到国民的各个领域,遥感专题数据处理的需求也不断增大。易康软件主要应用在遥感分类,影像特征提取,变化监测,快速制图等方面。主要体现在以下方面[1]:?农业:作物分类,农业保险,长势分析,作物估产等
?林业:植被分类,动态监测,变化提取,小斑区划,树冠统计等
?国土:土地利用分类,变化监测,快速制图,地图更新等
?环保:变化监测,环境分析,区域规划等
?灾害:损毁评估,受灾区域分类,应急响应等
易康软件在各领域的相关应用以及技术解决方案,可以参见相关文献,易康官方网站以及相关资料等。
6.易康软件基本操作
易康软件的基本操作流程如图6.1所示,首先对高分影像进行预处理,提高影像数据质量以方便进一步影像分析;然后对影像进行选择最优尺度进行尺度分割,提取影像对象;接着通过遥感目视判读建立分类体系,并且选择分类特征(如光谱,形态纹理特征等)和各地物的样本对象。最后进行自动分类。最后对分类结果进行评价,对于错分和漏分的影像对象可以进行手动改动分类结果,也可以进行重新分类。
在运用易康软件进行影像信息提取或是面向对象分类时,一方面最优分割尺度的选择,需要针对目标地物选择合适的分割尺度,合乎目标地物真实轮廓的分割尺度视为最优尺度,综合考虑各方面需求选择最优尺度;另一方面分类特征体系的建立,可以通过Feature View 查看各类地物特征值的分布情况,选择最能区别该地物的分类特征。
图6.1 易康软件遥感影像处理一般操作流程
接下来主要基于规则面向对象分类和基于样本面向对象分类来介绍易康软件基本操作。
6.1基于规则面向对象分类
实验的数据以及操作指南可以参见文献[8]。分割层次网络和分类体系可以参见图6.2所示,主要操作步骤有:
(1)多尺度分割
基于像素层,尺度参数为40,生成L1层;基于L1层,尺度参数50生成L2;基于L2层,尺度参数为70生成L3层;基于L3层,尺度参数为100生成L4。
(2)建立分类体系
通过目视判读,确定主要有道路,房屋,草地,湖泊四大类。
(3)确定分类特征
通过查看Feature View,通过各对象第三波段的光谱均值(Mean Layer3)区分非人工(草地和湖泊)和人工(道路和房屋);通过非人工1各对象第一波段的光谱均值(Mean Layer1)区分草地和湖泊;由于道路的长宽比较大,通过长宽比将人工1中的道路和房屋区分开来。对于大的区域采用大的尺度,对于面积小的目标地物采用小的尺度。如在L4(尺度为100)上分类人工和非人工,在L1(尺度为40)上分类道路,房屋等。
(4)自动分类
确定分类体系和分类规则后,选择classfication分类算法进行自动分类。
原始高分辨率图像如图6.3所示,最后分类结果见图6.4。
图6.2. 分类规则逻辑网络图
图6.3. 原始高分影像图6.4. 分类结果
6.2基于样本面向对象分类
基于样本面向对象分类其实质是一种监督分类方法。本实验数据以及操作指南主要参考文献[9]。在本实验中主要通过先建立分类体系,然后选择分类特征建立特征空间,最后选择各类地物的样本对象,采用最邻近分类方法进行自动分类。最邻近分类法的基本原理就是在特征空间内计算待识别对象特征向量与已知样本对象间的距离,并将带识别目标划分为距离最近的一类[7]。
7.结语
本论文主要对易康软件的重要技术,如面向对象思想,多尺度分割,模糊分类,分类特征描述进行了简要介绍。旨在让大家对面向对象影像分析以及eCognition软件有一个概略的了解,并希望给大家的研究带来一些启示和思考。对于面向对象影像分析在最优尺度分割,
模糊分类法则,合并策略以及分类特征描述建模方面还有待进一步研究和深入。
面向对象思想应用在程序设计,影像分析,图像处理各个方面,对于面向对象思想的精髓以及面向对象思想的优势还有待逐渐消化。
抽取Soul of Imagery是我们进行影像分析的最终目的,所以我们不禁思考What’s Soul of Imagery。
不论是做应用还是做研究,最终都是为人们的生产生活服务,EC软件其应用价值和研究价值在哪?我们又如何充分应用这些资源,这些都是我们进行影像分析以及其他研究需要思考的问题。
【参考资料】
[1] eCognition及其在工程化遥感图像自动解译中的应用.全景公司.
[2] User Guide. 易康官方用户指南文件
[3] Reference Book. 易康官方参考帮助
[4] 谭衢霖,刘正军,沈伟. 一种面向对象的遥感影像多尺度分割方法[J].北京交通大学
学报,2007,31(4).
[5] 孙波中.多尺度分割技术在高分辨率影像信息提取中的应用研究[D]. 西安科技大学.
[6] 高伟. 基于特征知识库的遥感信息提取技术研究[D].中国地质大学,2001年5月.
[7] 易康分类特征介绍
https://www.360docs.net/doc/114368761.html,/view/4d0dfff9941ea76e58fa04f0.html?from=related&hasrec=1
[8] 刘军. 易康软件操作实验——面向对象影像分类(基于规则)
[9] 刘军. 易康软件操作实验——面向对象特征提取(基于样本)
影像信息提取之——面向对象特征提取
同物异谱,同谱异物”会对影像分类产生的影响,加上高分辨率影像的光谱信息不是很丰富,还有经常伴有光谱相互影响的现象,这对基于像素的分类方法提出了一种挑战,面向对象的影像分类技术可以一定程度减少上述影响。 本专题以ENVI中的面向对象的特征提取FX工具为例,对这种技术和处理流程做一个简单的介绍。 本专题包括以下内容: ●面向对象分类技术概述 ● ENVI FX简介 ● ENVI FX操作说明 1、面向对象分类技术概述 面向对象分类技术集合临近像元为对象用来识别感兴趣的光谱要素,充分利用高分辨率的全色和多光谱数据的空间,纹理,和光谱信息来分割和分类的特点,以高精度的分类结果或者矢量输出。它主要分成两部分过程:对象构建和对象的分类。 影像对象构建主要用了影像分割技术,常用分割方法包括基于多尺度的、基于灰度的、纹理的、基于知识的及基于分水岭的等分割算法。比较常用的就是多尺度分割算法,这种方法综合遥感图像的光谱特征和形状特征,计算图像中每个波段的光谱异质性与形状异质性的综合特征值,然后根据各个波段所占的权重,计算图像所有波段的加权值,当分割出对象或基元的光谱和形状综合加权值小于某个指定的阈值时,进行重复迭代运算,直到所有分割对象的综合加权值大于指定阈值即完成图像的多尺度分割操作。 影像对象的分类,目前常用的方法是“监督分类”和“基于规则(知识)分类”。这里的监督分类和我们常说的监督分类是有区别的,它分类时和样本的对比参数更多,不仅仅是光谱信息,还包括空间、纹理等对象属性信息。基于规则(知识)分类也是根据影像对象的属性和阈值来设定规则进行分类。 表1为三大类分类方法的一个大概的对比。
遥感影像的分类处理
摘要 在面向对象的影像分类方法中,首先需要将遥感影像分割成有意义的影像对象集合,进而在影像对象的基础上进行特征提取和分类。本文针对面向对象影像分类思想的关键环节展开讨论和研究,(1) 采用基于改进分水岭变换的多尺度分割算法对高分辨率遥感影像进行分割。构建了基于高斯尺度金字塔的多尺度视觉单词,并且通过实验证明其表达能力优于经典的词包表示。最后,在词包表示的基础上,利用概率潜在语义分析方法对同义词和多义词较强的鉴别能力对影像对象进行分析,找出其最可能属于的主题或类别,进而完成影像的分类。 近些年来,随着航空航天平台与传感器技术的高速发展,获取的遥感影像的分辨率越来越高。高分辨率遥感影像在各行业部门的应用也越来越广泛,除了传统的国土资源、地质调查和测绘测量等部门,还涉及到城市规划、交通旅游和环境生态等领域,极大地拓展了遥感影像的应用范围。因此,对高分辨率遥感影像的处理分析成为备受关注的领域之一。高分辨率遥感影像包括以下三种形式:高空间分辨率(获取影像的空间分辨率从以前的几十米提高到1 至5 米,甚至更高);高光谱分辨率(电磁波谱被不断细分,获取遥感数据的波段数从几十个到数百个);高时间分辨率(遥感卫星的回访周期不断缩短,在部分区域甚至可以连续观测)。本文所要研究的高分辨率遥感影像均是指“高空间分辨率”影像。 相对于中低分辨率的遥感数据,高空间分辨率遥感影像具有更加丰富的空间结构、几何纹理及拓扑关系等信息,对认知地物目标的属性特征更加方便,如光谱、形状、纹理、结构和层次等。另外,高分辨率遥感影像有效减弱了混合像元的影响,并且能够在较小的空间尺度下反映地物特征的细节变化,为实现更高精度的地物识别和分类提供了可能。 然而,传统的遥感影像分析方法主要基于“像元”进行,它处于图像工程中的“图像处理”阶段(见图1-1),已然不能满足当今遥感数据发展的需求。基于“像元”的高分辨率遥感影像分类更多地依赖光谱特征,而忽视影像的纹理、形状、上下文和结构等重要的空间特征,因此,分类结果会产生很严重的“椒盐(salt and pepper)现象”,从而影响到分类的精度。虽然国内外的很多研究人员针对以上缺陷提出了很多新的方法,如支持向量机(Support Vector Machine,SVM) 、纹理聚类、分层聚类(Hierarchical Clustering) 、神经网络(Neural Network, NN)等,但仅依靠光谱特征的基于像元的方法很难取得更好的分类结果。基于“像元”的传统分类方法还有着另一个局限:无法很好的描述和应用地物目标的尺度特征,而多尺度特征正是遥感信息的基本属性之一。由于在不同的空间尺度上,同样的地表空间格局与过程会表现出明显的差异,因此,在单一尺度下对遥感影像进行分析和识别是不全面的。为了得到更好的分类结果,需要充分考虑多尺度特征。 针对以上问题,面向对象的处理方法应运而生,并且逐渐成为高空间分辨率遥感影像分析和识别的新途径。所谓“面向对象”,即影像分析的最小单元不再是传统的单个像元,而是由特定像元组成的有意义的同质区域,也即“对象”;因此,在对影像分析和识别的过程
遥感影像分类实验报告
面向对象分类实验报告 姓名: 学号: 指导老师: 地球科学与环境工程学院
一、实验目的 面向对象法模拟人类大脑认知过程,将图像分割为不同均质的对象,充分利用对象所包含的信息,将知识库转换为规则特征,从而提取影像信息。因为分析的是对象而不是像元,因此我们可以利用对象丰富的语义信息,结合各种地学概念,如面积、距离、光谱、尺度、纹理等进行分析。 面向对象的遥感影像分析方法与传统的面向像元的影像分析方法不同。首先我们要用一定方法对遥感影像进行分割,在提取分割单元(图像分割后所得到的内部属性相对一致或均质程度较高的图像区域)的各种特征后,在特征空间中进行对象识别和标识,从而最终完成信息的分类与提取。 二、实验意义 1、使用eCognition进行面向对象的影像分类的流程; 2、体会面向对象思想的内涵,学会将大脑认知过程转变为机器语言; 三、实验内容 3.1、影像的预处理 利用ERDAS软件将所给的全色影像和多光谱遥感影像进行融合,达到既满足高空间分辨率,又保留光谱信息。Image interperter-> spatial enhancement-> resolution merge.输入融合前的两幅影像,完成影像的预处理过程。 图 1 图像融合步骤
图 2 融合后的图像 3.2、使用eCongition 创建工程 a、使用规则集模式创建工程 图 3 模式选择 b、file->new projection ,打开Create Project和Import Image Layers两个
对话框,将上面的实验数据导入。(注意,数据以及工程文件保存路径不要有中文) 图 4 导入数据 c、选择数据修改波段名称,并设置Nodata选项。
高空间分辨率遥感影像分割方法研究综述
高空间分辨率遥感影像分割方法研究综述 高空间分辨率遥感影像分割方法研究综述 刘建华毛政元 (福州大学,空间数据挖掘与信息共享教育部重点实验室,福建省空间信息工程研究中心,福州350002) 摘要:遥感影像分割是指把一幅影像划分为互不重叠的一组区域的过程,它要求得到的每个区域的内部具有某种一致性或相似性,而任意两个相邻的区域则不具有此种相似性。遥感影像分割是面向对象的遥感影像数据挖掘与应用中的一项关键技术,对于影像目标信息自动化提取与智能识别尤为重要,在面向对象的遥感影像处理工程中具有重要意义。本文对常见的高空间分辨率遥感影像分割方法与应用策略进行了分析,比较了各种分割方法的应用范围、优缺点及目前存在的改进措施。建立了面向对象的遥感影像分割方法的分类体系,最后指出了面向对象的遥感影像分割方法目前所存在的问题及应用前景。 关键词:高空间分辨率遥感影像影像分割方法应用策略进展 A Survey on High Spatial Resolution Remotely Sensed Imagery Segmentation Techniques and Application Strategy Liu Jian hua Mao zheng yuan (Fuzhou University, Spatial Information Research center, Fuzhou, 350002) Abstract: Remotely sensed imagery segmentation is a process of dividing an image into different regions such that each region is, but the union of any two adjacent regions is not, homogeneous. It is one of key techniques in the object-oriented remotely sensed imagery data mining and its application, also quite essential in remote sensing image processing engineering. In this paper, we have a rough survey on different methods of high spatial resolution remotely sensed imagery segmentation, categorizing them into four groups according to the gray or color information they are exploiting. The disadvantage of current methods and the proper progress which can be attained in the near future are pointed out at the end of this essay. Keywords: High Spatial Resolution Imagery, Segmentation methods, application strategy, advances and prospects 1 引言 高空间分辨率遥感影像(如GeoEye、WorldView、QuickBird、IKONOS等,本文简称高分影像)在诸多领域(地形图更新、地籍调查、城市规划、交通及道路设施、环境评价、精细农业、林业测量、军事目标识别和灾害评估等)得以广泛应用[1]。目前,影像信息提取自动化程度低是高分影像应用潜力得不到充分发挥的主要限制因素,是理论和应用研究中必须突破的瓶颈。 遥感影像分割是面向对象的遥感影像分析方法[2]的基础和关键,在遥感影像工程中处于影像处理与影像理解的中间环节,是面向对象的影像分析理论研究的突破口。按照一般的影像分割定义[3],分割出的影像对象区域需同时满足相似性和不连续性两个基本特性;其中相似性指该影像对象内的所有像元点都满足基于灰度、色彩、纹理等特征的某种相似性准则,不连续性是指影像对象的特征在区域边界处的不连续性。迄今为止,将计算机视觉领域的图像分割算法应用于图像分割过程中,已开展了较多的研究[4-7],并提出了大量的算法;但针对遥感影像尤其是高分影像的分割方法较少[8],仍不成熟。这是由于与其它类型图像的分割相比,高分影像分割难度更大,也更具挑战性。具体体现在高分影像其空间分辨率高、纹理信息丰富而光 基金项目: 国家重点基础研究发展计划项目(973)子课题“高空间分辨率遥感影像自适应数据挖掘方法研[2006CB708306]”,国家自然科学基金项目“基于场模型的自适应空间聚类方法研究[40871206]”。 作者简介: 刘建华,男,博士研究生,曾从事GIS与RS教学工作。目前主要研究方向为空间数据挖掘、遥感图像处理以及GIS与RS集成等。E-mail:sirc.liujh@https://www.360docs.net/doc/114368761.html,。
面向对象分类之图像分割
传统的基于像素的遥感影像处理方法都是基于遥感影像光谱信息极其丰富,地物间光谱差异较为明显的基础上进行的。对于只含有较少波段的高分辨率遥感影像,传统的分类方法,就会造成分类精度降低,空间数据的大量冗余,并且其分类结果常常是椒盐图像,不利于进行空间分析。为解决这一传统难题,模糊分类技术应运而生。模糊分类是一种图像分类技术,它是把任意范围的特征值转换为0 到1 之间的模糊值,这个模糊值表明了隶属于一个指定类的程度。通过把特征值翻译为模糊值,即使对于不同的范围和维数的特征值组合,模糊分类能够标准化特征值。模糊分类也提供了一个清晰的和可调整的特征描述。 对于影像分类来说,基于像元的信息提取是根据地表一个像元范围内辐射平均值对每一个像元进行分类,这种分类原理使得高分辨率数据或具有明显纹理特征的数据中的单一像元没有很大的价值。影像中地物类别特征不仅由光谱信息来刻画的,很多情况下(高分辨率或纹理影像数据)通过纹理特征来表示。此外背景信息在影像分析中很重要,举例来说,城市绿地与某些湿地在光谱信息上十分相似,在面向对象的影像分析中只要 明确城市绿地的背景为城市地区,就可以轻松地区分绿地与湿地,而在基于像元的分类中这种背景信息几乎不可利用。面向对象的影像分析技术是在空间信息技术长期发展的过程中产生的,在遥感影像分析中具有巨大的潜力,要建立与现实世界真正相匹配的地表模型,面向对象的方法是目前为止较为理想的方法。 面向对象的处理方法中最重要的一部分是图像分割。 图像分割是一种重要的图像技术,在理论研究和实际应用中都得到了人们的广泛重视。图像分割的方法和种类有很多,有些分割运算可直接应用于任何图像,而另一些只能适用于特殊类别的图像。有些算法需要先对图像进行粗分割,因为他们需要从图像中提取出来的信息。例如,可以对图像的灰度级设置门限的方法分割。值得提出的是,没有唯一的标准的分割方法。许多不同种类的图像或景物都可作为待分割的图像数据,不同类型的图像,已经有相对应的分割方法对其分割,同时,某些分割方法也只是适合于某些特殊类型的图像分割。分割结果的好坏需要根据具体的场合及要求衡量。图像分割是从图像处理到图像分析的关键步骤,可以说,图像分割结果的好坏直接影响对图像的理解。 为后续工作有效进行而将图像划分为若干个有意义的区域的技术称为图像分割(Image Segmentation),早期的图像分割方法可以分为两大类。一类是边界方法,这种方法假设图像分割结果的某个子区域在原来图像中一定会有边缘存在;一类是区域方法,这种方法假设图像分割结果的某个子区域一定会有相同的性质,而不同区域的像素则没有共同的性质。这两种方法都有优点和缺点,有的学者考虑把两者结合起来进行研究。现在,随着计算机处理能力的提高,很多方法不断涌现,如基于彩色分量分割、纹理图像分割。所使用的数学工具和分析手段也是不断的扩展,从时域信号到频域信号处理,小波变换等等。 目前,有许多的图像分割方法,从分割操作策略上讲,可以分为基于区域生成的分割方法,基于边界检测的分割方法和区域生成与边界检测的混合方法.图像分割主要包括4种技术:并行边界分割技术、串行边界分割技术、并行区域分割技术和串行区域分割技术。
一种改进的高分辨率遥感影像分割方法
第35卷第3期 地球科学———中国地质大学学报 Vol.35 No.32010年5月 Earth Science —Journal of China University of G eosciences May 2010 doi :10.3799/dqkx.2010.050 基金项目:教育部新世纪优秀人才计划资助项目(No.NCET 20720772);国家重点“863”项目(No.2007AA120503). 作者简介:高伟(1980-),男,博士生,主要从事遥感数据处理与信息提取的科研和教学工作.E 2mail :cuggaowei @hot https://www.360docs.net/doc/114368761.html, 一种改进的高分辨率遥感影像分割方法 高 伟1,2,刘修国1,2,彭 攀1,2,陈启浩1,2 1.中国地质大学信息工程学院,湖北武汉430074 2.地理信息系统软件及其应用教育部工程中心,湖北武汉430074 摘要:分形网络演化算法是面向对象的遥感影像分类中比较成熟的一种构建对象的算法,但在分割效率上有待进一步提高, 而四叉树分割是一种高效的图像分割方法.提出了一种基于四叉树预分割的分形网络演化构建对象的方法.实验证明,该方法基本不影响影像分割的效果,而且提高了形成初始对象的效率,较大程度上提高了整体的分割效率.关键词:影像分割;分形网络演化;高空间分辨率;四叉树;地理信息系统.中图分类号:TP311 文章编号:1000-2383(2010)03-0421-05 收稿日期:2010-01-15 An Improved Method of High 2R esolution R emote Sense Image Segmentation GAO Wei 1,2,L IU Xiu 2guo 1,2,PEN G Pan 1,2,CH EN Qi 2hao 1,2 1.Facult y of I nf ormation Engineering ,China Uni versit y of Geosciences ,W uhan 430074,China 2.Engineering Research Center f or GIS S of t w are and A p plications ,Minist ry of Education ,W uhan 430074,China Abstract :Fractal net evolution approach (FN EA )is a relatively mature one among the object 2oriented image segmentation algo 2rithms ,but its efficiency is to be improved.Quad 2Tree segmentation is a kind of effective image segmentation method.In this paper ,an improved object oriented multi 2scale image segmentation method based on the quad 2tree pre 2segmentation and FN EA is introduced.The experiment shows that the effect of its segmentation result is almost the same as that of traditional FN EA method.Moreover ,It saves time. K ey w ords :image segmentation ;f ractal net evolution approach ;high 2nesolution remote sense ;quad 2tree ;geographic informa 2tion system (GIS ). 0 引言 近年来,以I KONOS 和Quick 2Bird 为代表的高空间分辨率遥感影像得到广泛应用(高伟,2006).高分辨率遥感影像具有丰富的空间信息,地物几何结构和纹理信息,便于认识地物目标的属性特征,如地物的图层值、形状、纹理、层次和专题属性,有助于提高地物定位和判读精度,使得在较小的空间尺度上观察地表细节变化,进行大比例尺遥感制图,以及监测人为活动对环境的影响成为可能.为土地利用、城市规划、环境监测等民用方面提供了更便利、更详细的数据源.高分辨率影像的广泛应用迫切要求人们对高分辨率遥感信息提取进行研究,以满足高分辨 率影像信息不断增长的应用和研究需要(Chen et al .,2009). 面向对象的高分辨率遥感影像的分类方法不仅利用地物的光谱信息,而且更多地利用几何信息和结构信息,可以结合其他空间知识和上下文信息来进行更为深入的分类,使得对高分辨率影像的分类更为合理和有效,这成为高分辨率影像信息提取的重要方法之一(Blaschke and Hay ,2001;陆关祥等,2002).在面向对象高分辨率影像的信息提取中,对遥感图像进行分割,形成具有一定特征相似性的影像区域,是实现从影像上进行地物目标计算机自动提取的第一步. 目前分形网络演化算法(Baatz and Schape ,
面向对象影像分析简要介绍--以eCognition为例
面向对象影像分析简要介绍 ——以eCognition软件为例 前言 遥感影像的光谱,空间,时间分辨率不断提高,为开展各类遥感应用提供各种数据。但在遥感数据获取能力增强的同时,也使得丰富的影像数据得不到充分利用和挖掘,从而出现“数据丰富,信息贫乏”的困境。如何快速自动准确地从遥感影像中提取出能满足某种应用的专题信息,是我们亟待要解决的问题。 随着面向对象思想的风行以及面向对象影像分析技术的不断成熟,使得我们从高分影像中提取专题信息变得更加便捷。尤其是一些商业的面向对象影像分析软件的出现,如eCognition,Feature Analysis。eCognition软件的口号就是“Exploring the soul of imagery(发掘影像最大潜能)”。本论文旨在从eCognition软件了解面向对象影像分析的相关思想和技术。希望通过探究eCognition软件背后的思想以及技术原理,如面向对象,多尺度分割,模糊分类等,为高分辨率遥感影像的特征描述以及建模带来一些启发。 1.面向对象 面向对象的思想是针对具体应用,将问题处理对象(逻辑概念上或物理概念上)划分为合适粒度(即对象)来进行处理,并封装其相应的属性以及行为,同时为了更好的复用以及扩展,维护更新,使其具有继承,多态,聚合等特性。 1.1对象 对象是指状态和行为的集合体,在物理实现上表现为数据和操作的集合,逻辑上表现为有职能的实体。它是用来描述现实世界中的物理概念或逻辑概念上的物体。比如人就是一个对象,它有性别,年龄,姓名等属性,人有吃饭睡觉等行为。武汉大学也是一个对象,它有名称,学院机构,学校历史等属性,也有教学科研等行为。不同的是人是物理概念上的对象,武汉大学是逻辑概念上的对象。 1.2抽象性,封装性,继承性 抽象是抽取出我们所感兴趣的部分,用这些少量特征来描述一个事物。封装性是对事物的数据和操作进行封装,即对其状态和行为进行封装。继承特性是对事物属性和行为的继承。
遥感图像分割和ENVI软件介绍实习报告
遥感图像处理 实训指导书 单位:测绘学院测绘工程1102班 姓名:王文兵 学号:1110020213 指导教师:陈晓宁、黄远程、竞霞、席晶、史晓亮 测绘科学与技术学院
2013 年12 月 实习一遥感图像处理实训概述与ENVI软件介绍 一、实验内容: 随着遥感技术日新月异的发展,伴随近年来我国高分辨率传感器的发展,在地物识别方面取得了巨大的成就和进步。根据陕西省地理国情白皮书的内容,发现我省各城市城区面积呈连年扩大之势,本次实验利用ZY-3卫星获取的2012年7月28日西安地区的高分辨影像为主要的数据源,通过对图像的光谱、空间和纹理信息的分析,采用多尺度分析和面向对象的分析方法,运用遥感影像自动分类方法,包括SVM、knn算法实现城市地物高精度的分类为主要目标。 本次试验加强深入了解ENVI软件的基本操作步骤以及各部分功能的使用方法,并对ZY-3卫星获取的西安市高分辨率影像图加以剪切,即剪切生成图名为g042016的实验图区,其覆盖范围为108°56’15”~109°00’ 00”; 34°15’ 00”~34°17’ 30”;之后对图区地物进行简单描述。 二、实验目的: 1.深入了解ENVI软件的各部分功能以及基本操作步骤,加深理解,增强动手能力; 2.学会对所需图区进行符合要求的剪切操作; 3.学会在高分辨影像图上识别地物并做简单描述;
三、实验步骤: 1.打开ENVI软件,打开File--Open Image File ,加载正视影像图ZY3_01a_mynnavp_017139_20120728_113641_0007_SASMAC_CHN_sec_ rel_001_1208096324.tif; 2.进行所需图区的截取;打开Basic Tools--Resize data(Spatial/Spectral),之后选中此图像进行截取; 3.单击Spatial Subset--map,之后在空格内输入所需图区的两个对角(左上和右下)经纬度坐标,即(108.9375,3 4.29);(109,34.25),单击OK确定后点Choose并建立文件夹进行保存,截取图区操作完成; 4.重新加载正视影像图区g042016,肉眼对图像进行简单的地物判别描述; 四、实验结果: 1.截取的全色影像图区g042016结果:
遥感专题讲座——影像信息提取(四、面向对象特征提取)
面向对象的影像分类技术 “同物异谱,同谱异物”会对影像分类产生的影响,加上高分辨率影像的光谱信息不是很丰富,还有经常伴有光谱相互影响的现象,这对基于像素的分类方法提出了一种挑战,面向对象的影像分类技术可以一定程度减少上述影响。 本小节以ENVI中的面向对象的特征提取FX模块为例,对这种技术和处理流程做一个简单的介绍。 本专题包括以下内容: ??●面向对象分类技术概述 ??●ENVI FX简介 ??●ENVI FX操作说明 1、面向对象分类技术概述 面向对象分类技术集合临近像元为对象用来识别感兴趣的光谱要素,充分利用高分辨率的全色和多光谱数据的空间,纹理,和光谱信息来分割和分类的特点,以高精度的分类结果或者矢量输出。它主要分成两部分过程:影像对象构建和对象的分类。
影像对象构建主要用了影像分割技术,常用分割方法包括基于多尺度的、基于灰度的、纹理的、基于知识的及基于分水岭的等分割算法。比较常用的就是多尺度分割算法,这种方法综合遥感图像的光谱特征和形状特征,计算图像中每个波段的光谱异质性与形状异质性的综合特征值,然后根据各个波段所占的权重,计算图像所有波段的加权值,当分割出对象或基元的光谱和形状综合加权值小于某个指定的阈值时,进行重复迭代运算,直到所有分割对象的综合加权值大于指定阈值即完成图像的多尺度分割操作。 影像对象的分类,目前常用的方法是“监督分类”和“基于知识分类”。这里的监督分类和我们常说的监督分类是有区别的,它分类时和样本的对比参数更多,不仅仅是光谱信息,还包括空间、纹理等信息。基于知识分类也是根据影像对象的熟悉来设定规则进行分类。 目前很多遥感软件都具有这个功能,如ENVI的FX扩展模块、易康(现在叫Definiens)、ERDAS的Objective模块、PCI的FeatureObjeX(新收购)等。 表1为三大类分类方法的一个大概的对比。 类型基本原理影像的最小单元适用数据源缺陷 传统基于光谱的分类方 法地物的光谱信息 特征 单个的影像像元 中低分辨率多光谱 和高光谱影像 丰富的空间信息利 用率几乎为零 基于专家知识决策树根据光谱特征、空 间关系和其他上 下文关系归类像 元 单个的影像像元多源数据知识获取比较复杂 面向对象的分类方法几何信息、结构信 息以及光谱信息 一个个影像对象 中高分辨率多光谱 和全色影像 速度比较慢
面向对象影像分类(样本模式)
面向对象影像分类(基于样本) 1、进行尺度为100的影像分割。 2、在Class Hierarchy中点右键,选择Insert class,依次建立四个类:房屋、道路、湖泊、草地。 3、编辑特征空间:选择菜单“Classification -> Nearest Neighbor -> Edit Standard NN Feature Space”,双击左边的特征列表中的特征,选择以下一些特征,如下图:
4、应用分类规则:选择菜单“Classification -> Nearest Neighbor -> Apply Standard NN to Classes”把它插入到类描述中,选择左边框中的类,单击,即可将该类加入到右边的框中,如下图: 点击OK后,在Class Hierarchy中双击一个类,如草地,可以看出分类特征已经添加到
该类中,如下图: 5、选择样本:选择菜单View -> toolbar -> sample,打开样本导航器,如下图: 选择按钮,打开样本编辑器,如下图:
6、选择类的样本:从样本编辑器中的Active Class中选择需要选择样本的类,如草地,在分割图上点击样例对象,当你单击一个类时,它的特征值在每个列出的特征被以高亮度的红色指示显示,这样可以使您对比不同对象它们的相关特征值,如下图:
该类的样本,选择后样本编辑器会成为如下的状态: 依次为所有的类选择足够的样本。 7、执行分类:在Process Tree中选择Append New,Algorithm中选择Basic Classification -> Classification,在Algorithm Parameters的Active Classes中选择“草地、道路、房屋、湖泊”, 设置如下图:
遥感图像的分割技术
遥感图像的主要分割技术 摘要:遥感图像都是一个地区自然与人文景观全貌的综合反映。每一幅遥感图像的覆盖面积是有限的,其包含的内容是多方面的、综合的。在对图像的应用中,多数情况下可能只对其中的某些部分感兴趣。例如,一幅遥感图像,从军事的角度看,可能只对机场、导弹基地、兵工厂的军事目标比较关心。这些目标在图像中具有独特性质,为了对此进行识别和分析,需要将其分离出来,提取其所具有的特征,进而进行识别分类。本文主要系统分析介绍了各种常用图像分割算法和技术,并简单评论了这些方法和技术的优势和不足之处。之后,对图像分割的发展趋势进行了展望。 关键词:图像分割;阈值法;分水岭算法;边缘检测;区域生长法;数学形态学。 引言: 图像分割就是指把图像分成互不重叠的区域并提取出感兴趣的目标的技术和过程。从数学角度来看,图像分割是将数字图像划分成互不相交的区域的过程。图像分割的过程也是一个标记的过程,即将属于同一区域的像素赋予相同编号的过程。图像分割的目的是将一幅图像分为几个区域,这几个区域之间具有不同的属性,同一区域中各像素具有某些相同的性质,这里的特性可以是灰度、颜色、纹理等。 遥感图像以其良好的时相性和丰富的信息量和逐步提高的分辨率等特点逐步在国民生活的各个领域发挥了极大作用,例如,震灾评估中对建筑物和生命线工程受损情况的了解,洪水检测中对洪水的淹
没范围的评估。为了识别和分析目标,需要将这些区域从整幅图像中分离并提取出来,然后做进一步的分析与处理,如进行特征提取、测量描述等。图像分割可以把原始图像转化为更抽象、更紧凑的形式,使得更高层次的图像分析与理解成为可能。因此,我们利用图像分割技术对其进行深入的研究、发掘其中隐含的信息具有非常重要的意义。分割的好坏直接影响到后续分析、识别和解译等的精度,由于遥感图像的复杂性和图像分割自身的不确定性,遥感图像的准确分割成为遥感图像处理研究的热点和难点之一。 以下内容主要分析图像分割的各种方法和技术。 一、图像分割的方法和技术 图像分割有4种不同的常用方法:阈值法、边界法、区域法、混合法,但没有唯一标准的方法。我们根据所获得的数据和所要达到目的,选择比较适合的一种分割方法进行分割。 1、阈值法 阈值分割法是一种传统的图像分割方法,因其实现简单、计算量小、性能较稳定而成为图像分割中最基本和应用最广泛的分割技术。阈值分割法是通过设定不同的特征阈值,把图像像素点分为具有不同灰度级的目标区域和背景区域的若干类。阈值分割法主要有全局阈值法、自适应阈值法。 阈值法的分割描述:设(x,y)是二维数字图像的平面坐标,图像灰度级的取值范围是G{0,1,2,…L-1}(习惯上0代表最暗的像素点,L-1代表最亮的像素点),位于坐标点(x,y)上
面向对象图像分类
【ENVI入门系列】24. 面向对象图像分类 目录 1.概述 2.基于规则的面向对象信息提取 第一步:准备工作 第二步:发现对象 第三步:根据规则进行特征提取 3.基于样本的面向对象的分类 第一步:选择数据 第二步:分割对象 第三步:基于样本的图像分类 4.基于规则的单波段影像提取河流信息 1.概述 面向对象分类技术集合临近像元为对象用来识别感兴趣的光谱要素,充分利用高分辨率的全色和多光谱数据的空间,纹理,和光谱信息来分割和分类的特点,以高精度的分类结果或者矢量输出。它主要分成两部分过程:影像对象构建和对象的分类。ENVI FX的操作可分为两个部分:发现对象(Find Object)和特征提取(Extract features),如下图所示。
图1.1 FX操作流程示意图(*项为可选操作步骤) 这个工具分为三种独立的流程化工具:基于规则、基于样本、图像分割。 本课程分别学习基于规则的面向对象分类和基于样本的面向对象分类,以及基于规则的方法从单波段灰度影像中提取河流信息。 注:本课程需要面向对象空间特征提取模块(ENVI Feature Extraction-FX)使用许可。
2.基于规则的面向对象信息提取 该工具位置在:Toolbox /Feature Extraction/ Rule Based Feature Extraction Workflow。 数据位置:"24-面向对象图像分类\1-基于规则"。 第一步:准备工作 根据数据源和特征提取类型等情况,可以有选择地对数据做一些预处理工作。 ?空间分辨率的调整 如果您的数据空间分辨率非常高,覆盖范围非常大,而提取的特征地物面积较大(如云、大片林地等)。可以降低分辨率,提供精度和运算速度。可利用Toolbox/Raster Management/Resize Data工具实现。 ?光谱分辨率的调整 如果您处理的是高光谱数据,可以将不用的波段除去。可利用Toolbox/Raster Management/Layer Stacking工具实现。 ?多源数据组合 当您有其他辅助数据时候,可以将这些数据和待处理数据组合成新的多波段数据文件,这些辅助数据可以是DEM, lidar 影像, 和SAR 影像。当计算对象属性时候,会生成这些辅助数据的属性信息,可以提高信息提取精度。可利用Toolbox/Raster Management/Layer Stacking工具实现。
遥感的面向对象分类法
遥感的面向对象分类法 传统的基于像素的遥感影像处理方法都是基于遥感影像光谱信息极其丰富,地物间光谱差异较为明显的基础上进行的。对于只含有较少波段的高分辨率遥感影像,传统的分类方法,就会造成分类精度降低,空间数据的大量冗余,并且其分类结果常常是椒盐图像,不利于进行空间分析。为解决这一传统难题,模糊分类技术应运而生。模糊分类是一种图像分类技术,它是把任意范围的特征值转换为 0 到 1 之间的模糊值,这个模糊值表明了隶属于一个指定类的程度。通过把特征值翻译为模糊值,即使对于不同的范围和维数的特征值组合,模糊分类能够标准化特征值。模糊分类也提供了一个清晰的和可调整的特征描述。对于影像分类来说,基于像元的信息提取是根据地表一个像元范围内辐射平均值对每一个像元进行分类,这种分类原理使得高分辨率数据或具有明显纹理特征的数据中的单一像元没有很大的价值。影像中地物类别特征不仅由光谱信息来刻画的,很多情况下(高分辨率或纹理影像数据)通过纹理特征来表示。此外背景信息在影像分析中很重要,举例来说,城市绿地与某些湿地在光谱信息上十分相似,在面向对象的影像分析中只要明确城市绿地的背景为城市地区,就可以轻松地区分绿地与湿地,而在基于像元的分类中这种背景信息几乎不可利用。面向对象的影像分析技术是在空间信息技术长期发展的过程中产生的,在遥感影像分析中具有巨大的潜力,要建立与现实世界真正相匹配的地表模型,面向对象的方法是目前为止较为理想的方法。面向对象的处理方法中最重要的一部分是图像分割。 随着对地观测任务逐渐精细化,高分辨率遥感卫星影像的应用越来越广泛。这对遥感影像分类方法提出了挑战。已有的研究表明:基于像元的高分辨率遥感影像分类存在明显的限制。近年来,面向对象影像分析(Object-Based ImageAnalysis,OBIA)在高分辨率遥感影像处理中渐露头角,被认为是遥感与地理信息科学发展的重要趋势。本文针对面向对象影像分类(Object-Based Image Classification,OBIC)方法中的若干问题开展研究。主要研究内容与结论包括: 1)模糊遥感影像分割算法研究 针对当前影像分割算法应用于模糊影像时产生过渡区对象的问题,设计了过渡区对象识别方法。对简单地物模糊影像和复杂地物模糊影像进行实验发现:提出的算法能够有效识别过渡区对象。 2)代表地物最佳分割尺度研究 针对多参考对象情况下的地物最佳分割尺度选择问题,设计了基于对象内部同质性加权
3-遥感影像切割与合并
遥感影像切割与合并 一、打开Erdas imagine 8.5软件 注意:为保证切割与合并的顺利进行,矢量格式的边界图层必须与img格式的遥感图像保持投影的一致性。 如果不一致,可以用ArcMap进行转换。 二、影像切割 1、把矢量格式的边界图层(如*.cov格式、*.shp格式)转变为栅格图层(如*.img 格式),即victor to raster。 命令如下:Erdas-interpreter-utilities-victor to raster :见图中红圈所示。
2、生成mask文件。按图中红圈所示输入相应的内容。 以连云港市为例,输入矢量文件lygs.shp,生成的mask文件命名为:lyg_mask.ing。其余按红圈所示进行修改。点击“ok”即可。 3、图像切割: 命令如下:Erdas-interpreter-utilities-mask:见图中红圈所示。
按图中红圈进行设置:先输入被切割文件如js_lat_bount_2003.img,然后输入切割边界文件如lyg_mask.img;最后输出切割下来的文件名如lygs.img。 其余配置见图。点击“ok”即可。
三、影像合并 (一)一般图像合并 1、运行Erdas-Dataprep-mosaic images,如下图中红圈所示。 2、运行Edit-Add images,如下图所示。 3、输入images图像,其余选择如下图所示。点击“Add”
4、在下图窗口中再加入另一副图像。如图中鼠标所示。原来加入的图像为1。 5、输入images图像,其余选择如下图所示。点击“Add”
面向对象的影像分析采用多尺度分割技术生成有意义的多边形对象
面向对象的影像分析采用多尺度分割技术生成有意义的多边形对象,以影像对象为信息提取的基本单元,运用模糊数学分类方法实现类别信息的自动提取。与传统的基于像元的影像处理方法相比较,面向对象的影像信息提取的基本处理单元是影像对象,而不是单个的像元。对每一种面向对象的影像处理方法来说,成功的影像分割都是必要的前提,分害d结果的好坏将直接影响模糊分类结果的精度,因此影像分割至关重要。本章主要分析和研究这种面向对象的多源影像多尺度分割技术,即影像对象的多尺度构建技术。面向对象的遥感影像分析的基本原理是根据像元的形状、颜色、纹理等特征,把具有 相同特征的象素组成一个影像对象,然后根据每一个对象的特征对这些影像对象进行分类。面向对象影像分析有两个独立的模块:对象生成与信息提取。对象生成是采用分割技术生 成属性信息不同的影像对象的过程,因此很多文献中称为影像分割,在图像处理领域中常称为图像分割或图象分割。影像分割是经过两个步骤完成的:首先对整个影像进行尺度空 间的构建,即根据所预设的尺度分割参数将影像中的像元划分为不同亮度值的区域,然后再根据其他的分割参数提取出不同的对象多边形。对每一种面向对象的影像处理方法来说,成功的影像分割都是必要的前提。影像分割及基于分割的要素提取、特征提取和参数测量等将原始影像转化为更抽象更 紧凑的形式,使得更高层次的影像分析和理解成为可能。影像分割的方法也就非常之多,下面介绍三类与遥感应用密切相关的影像分割方法:边缘检测方法、特征空间聚类法、区 域提取方法。2.2.2边缘检测方法 基于边缘检测的影像分割方法是先利用不同区域间像元灰度不连续的特点检测目标的边缘点,然后组成目标的边界实现分割。边缘检测可分为并行边缘检测和串行边缘检测,常用的方法有微分算子法和串行边缘检测算法。影像中相邻的不同区域间总存在边缘,边缘处像元的灰度不连续可通过求导数来检测到。如一阶微分算子有Roberts } 1'rewitt和Sobel 算子,二阶微分算子有Laplace和Kirsh算子等。在实际应用中各种微分算子常用小区域模板来表示,微分运算是利用模板与影像卷积来实现。这些算子对噪声敏感,只适合于噪声较小不太复杂的影像。Log算子和canny算子是具有平滑功能的二阶和一阶微分算子,边 缘检测效果好。串行边界查找法是先检测边缘再串行连接成闭合边界的方法,这种方法在很大程度上受到起始点影像[23]0 这种分割方法适合处理区域内部移植性高而且边界变化明显的情况,尤其适合对特定目标的提取。但是边缘检测只使用了局部信息,难以保证分割区域内部的颜色一致,且不容易产生连续的封闭区域轮廓[39] 2.2.3特征空间聚类法 基于特征空间聚类的影像分割方法是将影像空间中的像元用对应的特征空间目标点 表示,根据它们在特征空间的聚集对特征空间进行分割,然后将它们映射回原影像空间,得到分割结果。如果以像元的灰度值为特征,灰度直方图代表特征空间,用闽值将特征空间划分开,把得到的特征类映射回影像空间实现分割,这种算法也称之为闽值分割法[23]e 除像元灰度值外,其它的影像特征也可以用于聚类,常用的有K一均值聚类法、模糊K一均 值聚类法[24], ISODATA聚类法[zs]等。 特征空间聚类法比基于边缘检测的方法更抗噪声,但由于不能完全利用影像像元空间分布的信息,该方法也会导致产生影像空间不连通的分割区域,而且该方法在像元聚类迭代时运算复杂度较大[[23]e2.2.4区域提取方法 基于区域的影像分割方法有两种基本形式,一种是从单个像元出发,逐步合并以形成所需的分割结果,另外一种是从整景影像出发,逐渐分裂切割为满足条件的分割区域。当然实际应用中多数的算法是这两种思路的综合运用。区域生长和分裂合并法是两种典型的 区域特征分割方法。
面向对象影像分类
面向对象影像分类 面向对象的影像分类是在面向对象特征提取的基础上进行的。在分类之前,必须根据需要提取的地物类别,选择合适的尺度和合适的特征,然后根据地物类别的性质,设计好分类策略和步骤。对于给出的实验数据,我们的要求是分成草地、道路、房屋和湖泊四个类,根据面向对象特征提取中的经验可以发现,在Object Features -> Layer Values -> Mean -> Layer 3上可以很好地将草地/湖泊和道路/房屋分开,然后根据Object Features -> Geometry -> Extent -> Length/Width提取道路,因此分类策略是:先将草地/湖泊和道路/房屋分开,然后再分别针对草地/湖泊和道路/房屋的特征,将草地和湖泊、道路和房屋分开。 具体分类步骤如下: 1、多尺度分割:按照面向对象特征提取中的步骤,设置三个尺度100、70和50,并进行分割,分别得到L1、L2和L3层尺度影像,在尺度层网络中,L1尺度最大,在最上面,往下分别是L2和L3。最后的分类结果需要集中显示在一个层,因此还需要再加一个尺度层,只不过这个尺度层不纳入上面的尺度层网络中。在Process Tree中点右键,选择Append New,算法选择Segmentation -> multiresolution segmentation,Image Object Domain设为pixel level,尺度设为40,新层的名称为L4,同时运行该分割,得到L4层的分割结果。 2、在Class Hierarchy中添加4个类,右键点击空白处,选择Insert Class,在弹出的对话框中分别命名为level1、level2、level3和level4,颜色都选择为灰白色: