渐开线圆柱齿轮MATLAB建模及其有限元网格的自动划分_郑旖
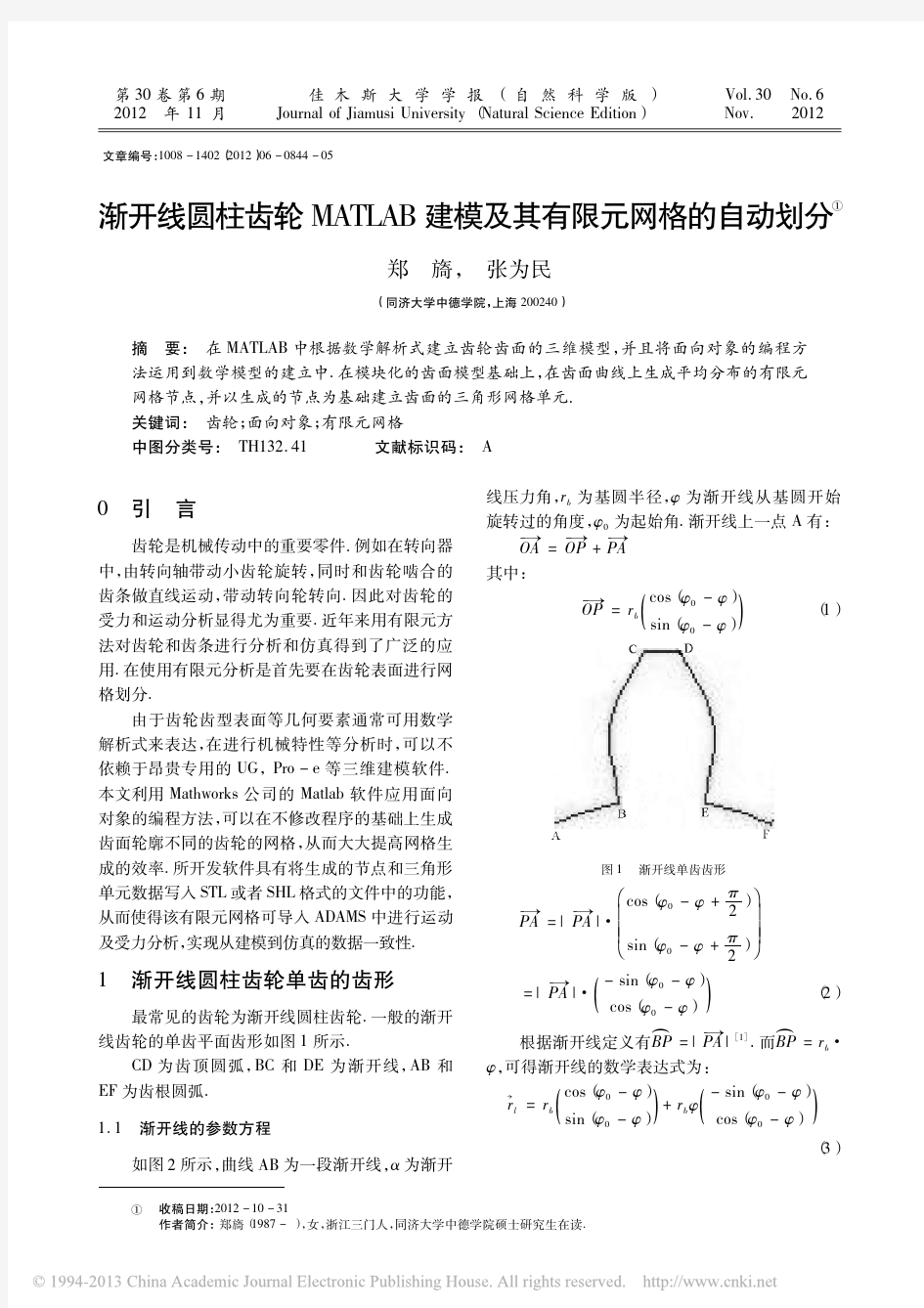
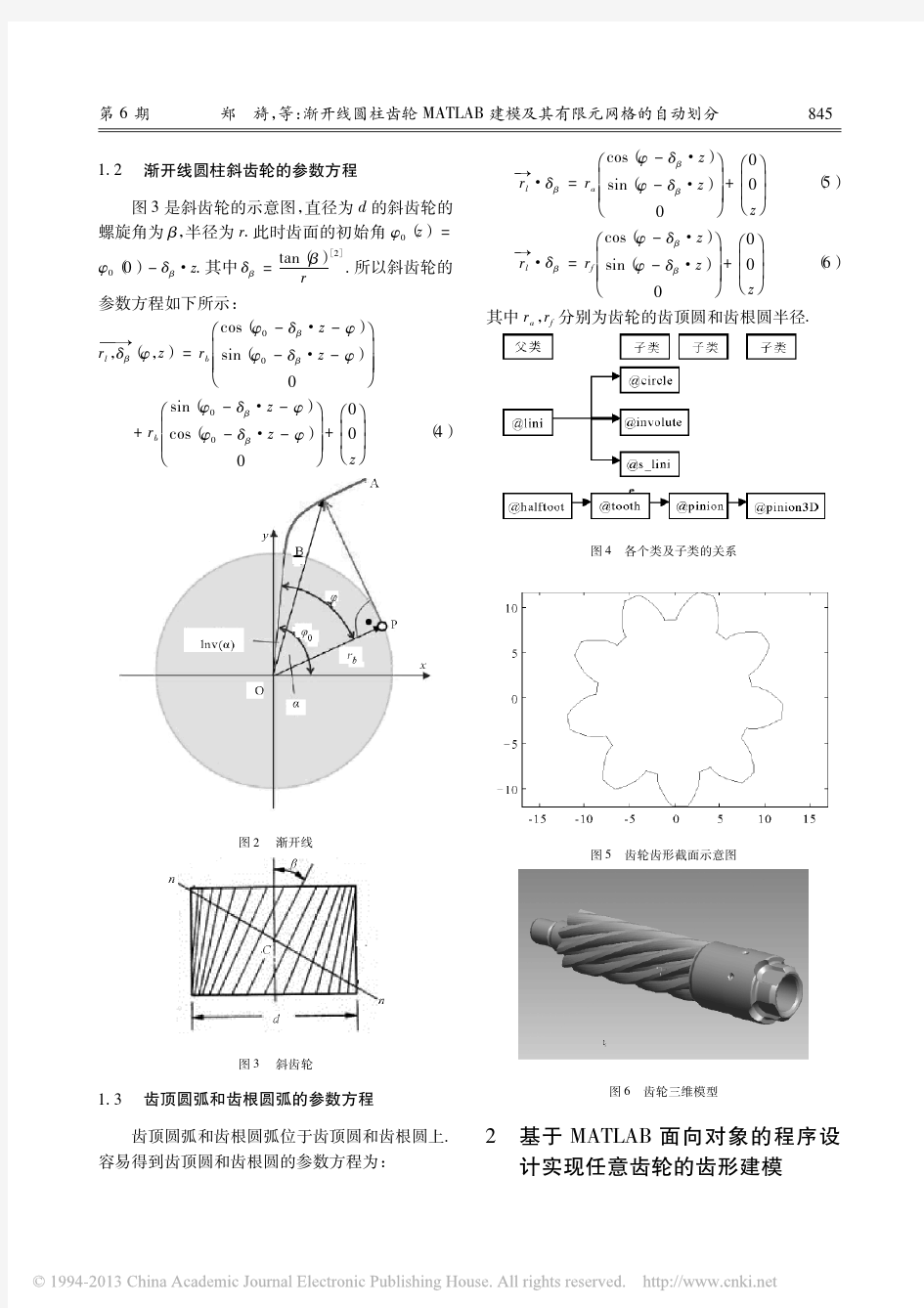
有限元网格划分的基本原则
有限元网格划分的基本原则 划分网格是建立有限元模型的一个重要环节,它要求考虑的问题较多,需要的工作量较大,所划分的网格形式对计算精度和计算规模将产生直接影响。为建立正确、合理的有限元模型,这里介绍划分网格时应考虑的一些基本原则。 1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随网格数量的变化。可以看出,网格较少时增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高甚微,而计算时间却有大幅度增加。所以应注意增加网格的经济性。实际应用时可以比较两种网格划分的计算结果,如果两次计算结果相差较大,可以继续增加网格,相反则停止计算。 图1 位移精度和计算时间随网格数量的变化 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。同样在响应计算中,计算应力响应所取的网格数应比计算位移响应多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格,如果计算的模态阶次较高,则应选择较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。 2 网格疏密 网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据的分布特点。在计算数据变化梯度较大的部位(如应力集中处),为了较好地反映数据变化规律,需要采用比较密集的网格。而在计算数据变化梯度较小的部位,为减小模型规模,则应划分相对稀疏的网格。这样,整个结构便表现出疏密不同的网格划分形式。图2是中心带圆孔方板的四分之一模型,其网格反映了疏密不同的划分原则。小圆孔附近存在应力集中,采用了比较密的网格。板的四周应力梯度较小,网格分得较稀。其中图b中网格疏密相差更大,它比图a中的网格少48个,但计算出的孔缘最大应力相差1%,而计算时间却减小了36%。由此可见,采用疏密不同的网格划分,既可以保持相当的计算精度,又可使网格数量减
matlab有限元分析实例
MATLAB: MATLAB是美国MathWorks公司出品的商业数学软件,用于数据分析、无线通信、深度学习、图像处理与计算机视觉、信号处理、量化金融与风险管理、机器人,控制系统等领域。 MATLAB是matrix&laboratory两个词的组合,意为矩阵工厂(矩阵实验室),软件主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式。 MATLAB和Mathematica、Maple并称为三大数学软件。它在数学类科技应用软件中在数值计算方面首屈一指。MATLAB可以进行矩阵运算、绘制函数和数据、实现算法、创建用户界面、连接其他编程语言的程序等。MATLAB的基本数据单位是矩阵,它的指令表达式与数学、工程中常用的形式十分相似,故用MATLAB来解算问题要比用C,FORTRAN等语言完成相同的事情简捷得多,并且MATLAB也吸收了像Maple等软件的优点,使MATLAB成为一个强大的数学软件。在新的版本中也加入了对C,FORTRAN,C++,JAVA的支持。 MATLAB有限元分析与应用:
《MATLAB有限元分析与应用》是2004年4月清华大学出版社出版的图书,作者是卡坦,译者是韩来彬。 内容简介: 《MATLAB有限元分析与应用》特别强调对MATLAB的交互应用,书中的每个示例都以交互的方式求解,使读者很容易就能把MATLAB用于有限分析和应用。另外,《MATLAB有限元分析与应用》还提供了大量免费资源。 《MATLAB有限元分析与应用》采用当今在工程和工程教育方面非常流行的数学软件MATLAB来进行有限元的分析和应用。《MATLAB有限元分析与应用》由简单到复杂,循序渐进地介绍了各种有限元及其分析与应用方法。书中提供了大量取自机械工程、土木工程、航空航天工程和材料科学的示例和习题,具有很高的工程应用价值。
在ANSYS平台上的复杂有限元网格划分技术
在ANSYS平台上的复杂有限元网格划分技术 1. 网格密度 有限元结构网格数量的多少将直接影响计算结果的精度和计算规模的大小。一般来说,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,怎样在这两者之间找到平衡,是每一个CAE工作者都想拥有的技术。网格较少时,增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高很少,而计算时间却大幅度增加。所以应该注意网格数量的经济性。实际应用时,可以比较两种网格划分的计算结果,如果两次计算结果相差较大,应该继续增加网格,重新计算,直到结果误差在允许的范围之内。 在决定网格数量时还应该考虑分析类型。静力分析时,如果仅仅是计算结构的变形,网格数量可以少一点。如果需要计算应力,则在精度要求相同的情况下取相对较多的网格。同样在结构响应计算中,计算应力响应所取的网格数量应该比计算位移响应的多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选取较少的网格,如果计算的阶数较高,则网格数量应该相应的增加。在热分析中,结构内部的温度梯度不大时,不需要大量的内部单元,否则,内部单元应该较多。 有限元分析原则是把结构分解成离散的单元,然后组合这些单元
解得到最终的结果。其结果的精度取决于单元的尺寸和分布,粗的网格往往其结果偏小,甚至结果会发生错误。所以必须保证单元相对足够小,考虑到模型的更多的细节,使得到的结果越接近真实结果。由于粗的网格得到的结果是非保守的,因此要认真查看结果,其中有几种方法可以帮助读者分析计算结果与真实结果之间的接近程度。 最常用的方法是用对结果判断的经验来估计网格的质量,以确定网格是否合理,如通过看云图是否与物理现象相一致,如果云图线沿单元的边界或与实际现象不一致,那么很有可能结果是不正确的。 更多的评价网格误差的方法是通过比较平均的节点结果和不平均的单元结果。如在ANSYS中,提供了两条显示结果的命令:PLNS,PLES。前者是显示平均的节点结果,后者是显示不平均的单元结果。PLNS命令是计算节点结果,它是通过对该节点周围单元结果平均后得到的,分析结果是基于单元高斯积分点值,然后外插得到每个节点,因此在给定节点周围的每个单元都由自己的单元计算得到,所以这些节点结果通常是不相同的。PLNS命令是在显示结果之前将每个节点的所有结果进行了平均,所以看到的云图是以连续的方式从一个单元过渡到另外一个单元。而PLES命令不是对节点结果平均,所以在显示云图时单元和单元之间是不连续的。这种不连续程度在网格足够密(即单元足够小)的时候会很小或不存在,而在网格较粗时很大。由于PLNS结果是一个平均值,所以它得到的结果会比PLES的结果小,他
Matlab有限元分析操作基础
Matlab 有限元分析20140226 为了用Matlab 进行有限元分析,首先要学会Matlab 基本操作,还要学会使用Matlab 进行有限元分析的基本操作。 1. 复习:上节课分析了弹簧系统 x 推导了系统刚度矩阵 11221 21200k k k k k k k k -????-????--+??
2. Matlab有限元分析的基本操作 (1)单元划分(选择何种单元,分成多少个单元,标号)(2)构造单元刚度矩阵(列出…) (3)组装系统刚度矩阵(集成整体刚度矩阵) (4)引入边界条件(消除冗余方程) (5)解方程 (6)后处理(扩展计算)
3. Matlab有限元分析实战【实例1】
分析: 步骤一:单元划分
步骤二:构造单元刚度矩阵 >>k1=SpringElementStiffness(100) >>…?
步骤三:构造系统刚度矩阵 a) 分析SpringAssemble库函数function y = SpringAssemble(K,k,i,j) % This function assembles the element stiffness % matrix k of the spring with nodes i and j into the % global stiffness matrix K. % function returns the global stiffness matrix K % after the element stiffness matrix k is assembled. K(i,i) = K(i,i) + k(1,1); K(i,j) = K(i,j) + k(1,2); K(j,i) = K(j,i) + k(2,1); K(j,j) = K(j,j) + k(2,2); y = K; b) K是多大矩阵? 今天的系统刚度矩阵是什么? 因为 11 22 1212 k k k k k k k k - ?? ?? - ????--+ ?? 所以 1000100 0200200 100200300 - ?? ?? - ?? ?? -- ?? ?
ANSYS有限元网格划分的基本原则
ANSYS有限元网格划分的基本原则 引言 ANSYS中有两种建立有限元模型的方法:实体建模和直接生成。使用实体建模,首先生成能描述模型的几何形状的几何模型,然后由ANSYS程序按照指定的单元大小和形状对几何体进行网格划分产生节点和单元。对于直接生成法,需要手工定义每个节点的位置和单元的连接关系。 一般来说对于规模较小的问题才适于采用直接生成法,常见的问题都需要先通过实体建模生成几何模型,然后再对其划分网格生成有限元模型。随着计算机性能的提高,分析模型的复杂性和规模都越来越大,而直接生成法也因其自身的局限性逐渐的被淘汰,所以正确的理解划分网格的目的和掌握划分网格的方法不论是对ANSYS的学习还是对二次开发都有重要的作用,尤其是当模型复杂度大,对模型的某些部分网格需要特殊处理时,这种对划分网格深度的理解作用更加明显。 2 常用高级网格划分方法 随着ANSYS功能的越来越强大和计算机性能的飞速提高,有限元分析向着大型化、复杂化的方向发展,而划分网格的观念也需要逐渐从二维模型向三维模型上上转变。这里主要描述三种常见的高级划分网格的方法,正确的理解和掌握这些划分网格的思想对于二次开发者来说非常的重要。 1)延伸网格划分 延伸网格划分是指将一个二维网格延伸生成一个三维网格;三维网格生成后去掉二维网格,延伸网格划分的步骤大体包括:先生成横截面、指定网格密度并对面进行网格划分、拖拉面网格生成体网格、指定单元属性、拖拉、完成体网格划分、释放已选的平面单元。 这里通过一个延伸网格划分的简单例子来加深对这种网格划分的理解。 图1 延伸网格划分举例 建立如图1所示的三维模型并划分网格,我们可以先建立z方向的端面,然后划分网格,通过拖拉的方法在z方向按照图中所示尺寸要求的三维模型,只需
_基于ANSYS的有限元法网格划分浅析
文章编号:1003-0794(2005)01-0038-02 基于ANSYS的有限元法网格划分浅析 杨小兰,刘极峰,陈 旋 (南京工程学院,南京210013) 摘要:为提高有限元数值的计算精度和对复杂结构力学分析的准确性,针对不同分析类型采用了不同的网格划分方法,结合实例阐述了ANSYS有限元网格划分的方法和技巧,指出了采用ANSYS有限元软件在网格划分时应注意的技术问题。 关键词:ANSYS;有限元;网格;计算精度 中图号:O241 82;TP391 7文献标识码:A 1 引言 ANSYS有限元分析程序是著名的C AE供应商美国ANSYS公司的产品,主要用于结构、热、流体和电磁四大物理场独立或耦合分析的CAE应用,功能强大,应用广泛,是一个便于学习和使用的优秀有限元分析程序。在ANSYS得到广泛应用的同时,许多技术人员对ANSYS程序的了解和认识还不够系统全面,在工作和研究中存在许多隐患和障碍,尤为突出的是有限元网格划分技术。本文结合工程实例,就如何合理地进行网格划分作一浅析。 2 网格划分对有限元法求解的影响 有限元法的基本思想是把复杂的形体拆分为若干个形状简单的单元,利用单元节点变量对单元内部变量进行插值来实现对总体结构的分析,将连续体进行离散化即称网格划分,离散而成的有限元集合将替代原来的弹性连续体,所有的计算分析都将在这个模型上进行。因此,网格划分将关系到有限元分析的规模、速度和精度以及计算的成败。实验表明:随着网格数量的增加,计算精确度逐渐提高,计算时间增加不多;但当网格数量增加到一定程度后,再继续增加网格数量,计算精确度提高甚微,而计算时间却大大增加。在进行网格划分时,应注意网格划分的有效性和合理性。 3 网格划分的有效性和合理性 (1)根据分析数据的类型选择合理的网格划分数量 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下取相对较多的网格。同样在响应计算中,计算应力响应所取的网格数应比计算位移响应多。在计算结构固有动力特性时,若仅仅是计算少数低阶模态,可以选择较少的网格。如果计算的模态阶次较高,则应选择较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,可划分较少的网格。 (2)根据分析数据的分布特点选择合理的网格疏密度 在决定网格疏密度时应考虑计算数据的分布特点,在计算固有特性时,因为固有频率和振型主要取决于结构质量分布和刚度分布,采用均匀网格可使结构刚度矩阵和质量矩阵的元素不致相差很大,可减小数值计算误差。同样,在结构温度场计算中也趋于采用均匀的网格形式。在计算数据变化梯度较大的部位时,为了更好地反映数据变化规律,需要采用比较密集的网格,而在计算数据变化梯度较小的部位,为了减小模型规模,则应划分相对稀疏的网格,这样整个结构就表现出疏密不同的网格划分形式。 以齿轮轮齿的有限元分析模型为例,由于分析的目的是求出齿轮啮合传动过程中齿根部分的弯曲应力,因此,分析计算时并不需要对整个齿轮进行计算,可根据圣文男原理将整个区域缩小到直接参与啮合的轮齿。虽然实际上参与啮合的齿数总大于1,但考虑到真正起作用的是单齿,通常只取一个轮齿作为分析对象,这样作可以大大节省计算机内存。考虑到轮齿应力在齿根过渡圆角和靠近齿面处变化较大,网格可划分得密一些。在进行疏密不同网格划分操作时可采用ANSYS提供的网格细化工具调整网格的疏密,也可采用分块建模法设置网格疏密度。 图1所示即为采用分块建模法进行网格划分。图1(a)为内燃机中重要运动零件连杆的有限元应力分析图,由于连杆结构对称于其摆动的中间平面,其厚度方向的尺寸远小于长度方向的尺寸,且载荷沿厚度方向近似均匀分布,故可按平面应力分析处 38 煤 矿 机 械 2005年第1期
CATIA有限元高级划分网格教程
CATIA有限元高级网格划分教程 盛选禹李明志 1.1进入高级网格划分工作台 (1)打开例题中的文件Sample01.CATPart。 (2)点击主菜单中的【开始】→【分析与模拟】→【Advanced Meshing Tools】(高级网格划分工具),就进入【Advanced Meshing Tools】(高级网格划分工具)工作台,如图1-1所示。进入工作台后,生成一个新的分析文件,并且显示一个【New Analysis Case】(新分析算题)对话框,如图1-2所示。 图1-1【开始】→【分析与模拟】→【Advanced Meshing Tools】(高级网格划分工具)(3)在【New Analysis Case】(新分析算题)对话框内选择【Static Analysis】(静力分析)选项。如果以后打开该对话框的时候均希望是计算静力分析,可以把对话框内的【Keep as default starting analysis case】(在开始时保持为默认选项)勾选。这样,下次进入本工作台时,将自动选择静力分析。 (4)点击【新分析算题】对话框内的【确定】按钮,关闭对话框。 1.2定义曲面网格划分参数 本节说明如何定义一个曲面零件的网格类型和全局参数。 (1)点击【Meshing Method】(网格划分方法)工具栏内的【高级曲面划分】按钮
,如图1-3所示。需要在【Meshing Method】(网格划分方法)工具栏内点击中间按钮的下拉箭头才能够显示出【高级曲 面划分】按钮。 图1-2【New Analysis Case】(新分析算题)对话框图1-3【高级曲面划分】按钮
有限元的MATLAB解法
有限元的MATLAB解法 1.打开MATLAB。 2.输入“pdetool”再回车,会跳出PDE Toolbox的窗口(PDE意为偏微分方程,是partial differential equations的缩写),需要的话可点击Options菜单下Grid命令,打开栅格。 3.完成平面几何模型:在PDE Toolbox的窗口中,点击工具栏下的矩形几何模型进行制作模型,可画矩形R,椭圆E,圆C,然后在Set formula栏进行编辑并(如双脊波导R1+R2+R3改为RI-R2-R3,设定a、b、s/a、d/b的值从而方便下步设定坐标) 用算术运算符将图形对象名称连接起来,若还需要,可进行储存,形成M文件。 4.用左键双击矩形进行坐标设置:将大的矩形left和bottom都设为0,width是矩形波导的X轴的长度,height是矩形波导的y轴的长度,以大的矩形左下角点为原点坐标为参考设置其他矩形坐标。 5.进行边界设置:点击“Boundary”中的“Boundary Mode”,再点击
“Boundary”中的“Specify Boundary Conditions”,选择符合的边界条件,Neumann为诺曼条件,Dirichlet为狄利克雷条件,边界颜色显示为红色。 6.进入PDE模式:点击"PDE"菜单下“PDE Mode”命令,进入PDE 模式,单击“PDE Specification”,设置方程类型,“Elliptic”为椭圆型,“Parabolic”为抛物型,“Hyperbolic”为双曲型,“Eigenmodes”为特征值问题。 7.对模型进行剖分:点击“Mesh”中“Initialize Mesh”进行初次剖分,若要剖的更细,再点击“Refine Mesh”进行网格加密。 8.进行计算:点击“Solve”中“Solve PDE”,解偏微分方程并显示图形解,u值即为Hz或者Ez。 9.单击“Plot”菜单下“Parameters”选项,打开“Plot Selection”对话框。选中Color,Height(3-D plot)和Show mesh三项,然后单击“Plot”按钮,显示三维图形解。 10.如果要画等值线图和矢量场图,单击“Plot”菜单下“Parameters”选项,打开“Plot Selection”对话框。选中Contour和Arrows两项,然后单击Plot按钮,可显示解的等值线图和矢量场图。 11.将计算结果条件和边界导入MATLAB中:点击“Export Solution”,再点击“Mesh”中“Export Mesh”。
《有限元基础教程》_【MATLAB算例】3.3.7(2)__三梁平面框架结构的有限元分析(Beam2D2Node)
【MA TLAB 算例】3.3.7(2) 三梁平面框架结构的有限元分析 (Beam2D2Node) 如图3-19所示的框架结构,其顶端受均布力作用,结构中各个 截面的参数都为:113.010Pa E =?,746.510I m -=?,426.810A m -=?。试基 于MA TLAB 平台求解该结构的节点位移以及支反力。 图3-19 框架结构受一均布力作用 解答:对该问题进行有限元分析的过程如下。 (1) 结构的离散化与编号 将该结构离散为3个单元,节点位移及单元编号如图3-20所示, 有关节点和单元的信息见表3-5。 (a ) 节点位移及单元编号
(b)等效在节点上的外力 图3-20 单元划分、节点位移及节点上的外载 (2)各个单元的描述 首先在MA TLAB环境下,输入弹性模量E、横截面积A、惯性矩I和长度L,然后针对单元1,单元2和单元3,分别二次调用函数Beam2D2Node_ElementStiffness,就可以得到单元的刚度矩阵k1(6×6)和k2(6×6),且单元2和单元3的刚度矩阵相同。 >> E=3E11; >> I=6.5E-7; >> A=6.8E-4; >> L1=1.44; >> L2=0.96; >> k1=Beam2D2Node_Stiffness(E,I,A,L1); >> k2=Beam2D2Node_Stiffness(E,I,A,L2); (3)建立整体刚度方程 将单元2和单元3的刚度矩阵转换成整体坐标下的形式。由于该结构共有4个节点,则总共的自由度数为12,因此,结构总的刚度矩阵为KK(12×12),对KK清零,然后两次调用函数Beam2D2Node_Assemble进行刚度矩阵的组装。 >> T=[0,1,0,0,0,0;-1,0,0,0,0,0;0,0,1,0,0,0;0,0,0,0,1,0;0,0,0,-1,0,0;0,0,0,0,0,1] ; >> k3=T'*k2*T; >> KK=zeros(12,12); >> KK=Beam2D2Node_Assemble(KK,k1,1,2);
基于Matlab语言的按平面三角形单元划分的结构有限元程序设计模板
基于Matlab语言的按平面三角形单元划分的结构有限元程序设计 专业:建筑与土木工程 班级:建工研12-2 姓名:韩志强 学号: 471220580
基于Matlab语言的按平面三角形单元划分 结构有限元程序设计 一、有限单元发及Matlab语言概述 1. 有限单元法 随着现代工业、生产技术的发展,不断要求设计高质量、高水平的大型、复杂和精密的机械及工程结构。为此目的,人们必须预先通过有效的计算手段,确切的预测即将诞生的机械和工程结构,在未来工作时所发生的应力、应变和位移因此,需要寻求一种简单而又精确的数值分析方法。有限单元法正是适应这种要求而产生和发展起来的一种十分有效的数值计算方法。 有限元法把一个复杂的结构分解成相对简单的“单元”,各单元之间通过结点相互连接。单元内的物理量由单元结点上的物理量按一定的假设内插得到,这样就把一个复杂结构从无限多个自由度简化为有限个单元组成的结构。我们只要分析每个单元的力学特性,然后按照有限元法的规则把这些单元“拼装”成整体,就能够得到整体结构的力学特性。 有限单元法基本步骤如下: (1)结构离散:结构离散就是建立结构的有限元模型,又称为网格划分或单元划分,即将结构离散为由有限个单元组成的有限元模型。在该步骤中,需要根据结构的几何特性、载荷情况等确定单元体内任意一点的位移插值函数。 (2)单元分析:根据弹性力学的几何方程以及物理方程确定单元的刚度矩阵。 (3)整体分析:把各个单元按原来的结构重新连接起来,并在单元刚度矩阵的基础上确定结构的总刚度矩阵,形成如下式所示的整体有限元线性方程: {}[]{}δ F=① K 式中,{}F是载荷矩阵,[]K是整体结构的刚度矩阵,{}δ是节点位移矩阵。 (4)载荷移置:根据静力等效原理,将载荷移置到相应的节点上,形成节点载荷矩阵。 (5)边界条件处理:对式①所示的有限元线性方程进行边界条件处理。 (6)求解线性方程:求解式①所示的有限元线性方程,得到节点的位移。在该步骤中,若有限元模型的节点越多,则线性方程的数量就越多,随之有限元分析的计算量也将越大。 (7)求解单元应力及应变根据求出的节点位移求解单元的应力和应变。
(完整版)有限元大作业matlab---课程设计例子
有限元大作业程序设计 学校:天津大学 院系:建筑工程与力学学院 专业:01级工程力学 姓名:刘秀 学号:\\\\\\\\\\\ 指导老师:
连续体平面问题的有限元程序分析 [题目]: 如图所示的正方形薄板四周受均匀载荷的作用,该结构在边界 上受正向分布压力, m kN p 1=,同时在沿对角线y 轴上受一对集中压 力,载荷为2KN ,若取板厚1=t ,泊松比0=v 。 [分析过程]: 由于连续平板的对称性,只需要取其在第一象限的四分之一部分参加分析,然后人为作出一些辅助线将平板“分割”成若干部分,再为每个部分选择分析单元。采用将此模型化分为4个全等的直角三角型单元。利用其对称性,四分之一部分的边界约束,载荷可等效如图所示。
[程序原理及实现]: 用FORTRAN程序的实现。由节点信息文件NODE.IN和单元信息文件ELEMENT.IN,经过计算分析后输出一个一般性的文件DATA.OUT。模型基本信息由文件为BASIC.IN生成。 该程序的特点如下: 问题类型:可用于计算弹性力学平面问题和平面应变问题 单元类型:采用常应变三角形单元 位移模式:用用线性位移模式 载荷类型:节点载荷,非节点载荷应先换算为等效节点载荷 材料性质:弹性体由单一的均匀材料组成 约束方式:为“0”位移固定约束,为保证无刚体位移,弹性体至少应有对三个自由度的独立约束 方程求解:针对半带宽刚度方程的Gauss消元法
输入文件:由手工生成节点信息文件NODE.IN,和单元信息文件ELEMENT.IN 结果文件:输出一般的结果文件DATA.OUT 程序的原理如框图:
有限元网格划分
有限元网格划分 摘要:总结近十年有限元网格划分技术发展状况。首先,研究和分析有限元网格划分的基本原则;其次,对当前典型网格划分方法进行科学地分类,结合实例,系统地分析各种网格划分方法的机理、特点及其适用范围,如映射法、基于栅格法、节点连元法、拓扑分解法、几何分解法和扫描法等;再次,阐述当前网格划分的研究热点,综述六面体网格和曲面网格划分技术;最后,展望有限元网格划分的发展趋势。 关键词:有限元网格划分;映射法;节点连元法;拓扑分解法;几何分解法;扫描法;六面体网格 1 引言 有限元网格划分是进行有限元数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。 2 有限元网格划分的基本原则 有限元方法的基本思想是将结构离散化,即对连续体进行离散化,利用简化几何单元来近似逼近连续体,然后根据变形协调条件综合求解。所以有限元网格的划分一方面要考虑对各物体几何形状的准确描述,另一方面也要考虑变形梯度的准确描述。为正确、合理地建立有限元模型,这里介绍划分网格时应考虑的一些基本原则。 2.1 网格数量 网格数量直接影响计算精度和计算时耗,网格数量增加会提高计
算精度,但同时计算时耗也会增加。当网格数量较少时增加网格,计算精度可明显提高,但计算时耗不会有明显增加;当网格数量增加到一定程度后,再继续增加网格时精度提高就很小,而计算时耗却大幅度增加。所以在确定网格数量时应权衡这两个因素综合考虑。 2.2 网格密度 为了适应应力等计算数据的分布特点,在结构不同部位需要采用大小不同的网格。在孔的附近有集中应力,因此网格需要加密;周边应力梯度相对较小,网格划分较稀。由此反映了疏密不同的网格划分原则:在计算数据变化梯度较大的部位,为了较好地反映数据变化规律,需要采用比较密集的网格;而在计算数据变化梯度较小的部位,为减小模型规模,网格则应相对稀疏。 2.3 单元阶次 单元阶次与有限元的计算精度有着密切的关联,单元一般具有线性、二次和三次等形式,其中二次和三次形式的单元称为高阶单元。高阶单元的曲线或曲面边界能够更好地逼近结构的曲线和曲面边界,且高次插值函数可更高精度地逼近复杂场函数,所以增加单元阶次可提高计算精度。但增加单元阶次的同时网格的节点数也会随之增加,在网格数量相同的情况下由高阶单元组成的模型规模相对较大,因此在使用时应权衡考虑计算精度和时耗。 2.4 单元形状 网格单元形状的好坏对计算精度有着很大的影响,单元形状太差的网格甚至会中止计算。单元形状评价一般有以下几个指标: (1)单元的边长比、面积比或体积比以正三角形、正四面体、正六面体为参考基准。 (2)扭曲度:单元面内的扭转和面外的翘曲程度。 (3)节点编号:节点编号对于求解过程中总刚矩阵的带宽和波前因数有较大的影响,从而影响计算时耗和存储容量的大小 2.5 单元协调性 单元协调是指单元上的力和力矩能够通过节点传递给相邻单元。为保证单元协调,必须满足的条件是: (1)一个单元的节点必须同时也是相邻点,而不应是内点或边界
Matlab有限元分析操作基础共11页
Matlab有限元分析20140226 为了用Matlab进行有限元分析,首先要学会Matlab基本操作,还要学会使用Matlab进行有限元分析的基本操作。 1. 复习:上节课分析了弹簧系统 x 推导了系统刚度矩阵
2. Matlab有限元分析的基本操作 (1)单元划分(选择何种单元,分成多少个单元,标号)(2)构造单元刚度矩阵(列出…) (3)组装系统刚度矩阵(集成整体刚度矩阵) (4)引入边界条件(消除冗余方程) (5)解方程 (6)后处理(扩展计算)
3. Matlab有限元分析实战【实例1】
分析: 步骤一:单元划分
>>k1=SpringElementStiffness(100)
a) 分析SpringAssemble库函数 function y = SpringAssemble(K,k,i,j) % This function assembles the element stiffness % matrix k of the spring with nodes i and j into the % global stiffness matrix K. % function returns the global stiffness matrix K % after the element stiffness matrix k is assembled. K(i,i) = K(i,i) + k(1,1); K(i,j) = K(i,j) + k(1,2); K(j,i) = K(j,i) + k(2,1); K(j,j) = K(j,j) + k(2,2); y = K; b) K是多大矩阵? 今天的系统刚度矩阵是什么? 因为 11 22 1212 k k k k k k k k - ?? ?? - ????--+ ?? 所以 1000100 0200200 100200300 - ?? ?? - ????-- ???
ANSYS 网格划分方法总结
(1) 网格划分定义:实体模型是无法直接用来进行有限元计算得,故需对它进行网格划分以生成有限元模型。有限元模型是实际结构和物质的数学表示方法。 在ANSYS中,可以用单元来对实体模型进行划分,以产生有限元模型,这个过程称作实体模型的网格化。本质上对实体模型进行网格划分也就是用一个个单元将实体模型划分成众多子区域。这些子区域(单元),是有属性的,也就是前面设置的单元属性。 另外也可以直接利用单元和节点生成有限元模型。 实体模型进行网格划分就是用一个个单元将实体模型划分成众多子区域(单元)。 (2)为什么我选用plane55这个四边形单元后,仍可以把实体模型划分成三角 形区域集合??? 答案:ansys为面模型的划分只提供三角形单元和四边形单元,为体单元只提供四面体单元和六面体单元。不管你选择的单元是多少个节点,只要是2D单元,肯定构成一个四边形或者是三角形,绝对没有五、六边形等特殊形状。网格划分也就是用所选单元将实体模型划分成众多三角形单元和四边形子区域。 见下面的plane77/78/55都是节点数目大于4的,但都是通过各种插值或者是合并的方式形成一个四边形或者三角形。 所以不管你选择什么单元,只要是对面的划分,meshtool上的划分类型设置就只有tri和quad两种选择。 如果这个单元只构成三角形,例如plane35,则无论你在meshtool上划分设置时tri还是quad,划分出的结果都是三角形。
所以在选用plane55单元,而划分的是采用tri划分时,就会把两个点合并为一个点。如上图的plane55,下面是plane单元的节点组成,可见每一个单元上都有两个节点标号相同,表明两个节点是重合的。 。 同样在采用plane77 单元,进行tri划分时,会有三个节点重合。这里不再一一列出。(3)如何使用在线帮助: 点击对话框中的help,例如你想了解plane35的相关属性,你可以
基于matlab的有限元法分析平面应力应变问题刘刚
姓名:刘刚学号:15 平面应力应变分析有限元法 Abstruct:本文通过对平面应力/应变问题的简要理论阐述,使读者对要分析的问题有大致的印象,然后结合两个实例,通过MATLAB软件的计算,将有限元分析平面应力/应变问题的过程形象的展示给读者,让人一目了然,快速了解有限元解决这类问题的方法和步骤! 一.基本理论 有限元法的基本思路和基本原则以结构力学中的位移法为基础,把复杂的结构或连续体看成有限个单元的组合,各单元彼此在节点出连接而组成整体。把连续体分成有限个单元和节点,称为离散化。先对单元进行特性分析,然后根据节点处的平衡和协调条件建立方程,综合后做整体分析。这样一分一合,先离散再综合的过程,就是把复杂结构或连续体的计算问题转化简单单元分析与综合问题。因此,一般的有限揭发包括三个主要步骤:离散化单元分析整体分析。 二.用到的函数 1. LinearTriangleElementStiffness(E,NU,t,xi,yi,xj,yj,xm,ym,p) (K k I f) (k u) (k u A) (E NU t) 三.实例 例1.考虑如图所示的受均布载荷作用的薄平板结构。将平板离散化成两个线性三角元,假定E=200GPa,v=,t=0.025m,w=3000kN/m. 1.离散化 2.写出单元刚度矩阵
通过matlab 的LinearTriangleElementStiffness 函数,得到两个单元刚度矩阵1k 和2k ,每个矩阵都是6 6的。 >> E=210e6 E = >> k1=LinearTriangleElementStiffness(E,NU,t,0,0,,,0,,1) k1 = +006 * Columns 1 through 5 0 0 0 0 0 0 0 0 Column 6 >> NU= NU = >> t= t = >> k2=LinearTriangleElementStiffness(E,NU,t,0,0,,0,,,1)
ANSYS结构有限元分析中的网格划分技术及其应用实例
一、前言 有限元网格划分是进行有限元数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 CAD软件中流行的实体建模包括基于特征的参数化建模和空间自由曲面混合造型两种 方法。Pro/E和SoildWorks是特征参数化造型的代表,而CATIA与Unigraphics等则将特征参数化和空间自由曲面混合造型有机的结合起来。现有CAD软件对表面形态的表示法已经大大超过了CAE软件,因此,在将CAD实体模型导入CAE软件的过程中,必须将CAD 模型中其他表示法的表面形态转换到CAE软件的表示法上,转换精度的高低取决于接口程序的好坏。在转换过程中,程序需要解决好几何图形(曲线与曲面的空间位置)和拓扑关系(各图形数据的逻辑关系)两个关键问题。其中几何图形的传递相对容易实现,而图形间的拓扑关系容易出现传递失败的情况。数据传递面临的一个重大挑战是,将导入CAE程序的CAD模型改造成适合有限元分析的网格模型。在很多情况下,导入CAE程序的模型可能包含许多设计细节,如细小的孔、狭窄的槽,甚至是建模过程中形成的小曲面等。这些细节往往不是基于结构的考虑,保留这些细节,单元数量势必增加,甚至会掩盖问题的主要矛盾,对分析结果造成负面影响。 CAD模型的“完整性”问题是困扰网格剖分的障碍之一。对于同一接口程序,数据传递的品质取决于CAD模型的精度。部分CAD模型对制造检测来说具备足够的精度,但对有限元网格剖分来说却不能满足要求。值得庆幸的是,这种问题通常可通过CAD软件的“完整性检查”来修正。改造模型可取的办法是回到CAD系统中按照分析的要求修改模型。一方面检查模型的完整性,另一方面剔除对分析无用的细节特征。但在很多情况下,这种“回归”很难实现,模型的改造只有依靠CAE软件自身。CAE中最直接的办法是依靠软件具有的“重构”功能,即剔除细部特征、缝补面和将小面“融入”大曲面等。有些专用接口在模型传递过程中甚至允许自动完成这种工作,并且通过网格剖分器检验模型的“完整性”,如发现“完整性”不能满足要求,接口程序可自动进行“完整性”修复。当几何模型距CAE分析的要求相差太大时,还可利用CAE程序的造型功能修正几何模型。“布尔运算”是切除细节和修理非完整特征的有效工具之一。 目前数据传递一般可通过专用数据接口,CAE程序可与CAD程序“交流”后生成与CAE 程序兼容的数据格式。另一种方式是通过标准图形格式如IGES、SAT和ParaSolid传递。现有的CAD平台与通用有限元平台一般通过IGES、STL、Step、Parasolid等格式来数据
有限元网格划分和收敛性
一、基本有限元网格概念 1.单元概述?几何体划分网格之前需要确定单元类型.单元类型的选择应该根据分析类型、形状特征、计算数据特点、精度要求和计算的硬件条件等因素综合考虑。为适应特殊的分析对象和边界条件,一些问题需要采用多种单元进行组合建模。? 2.单元分类选择单元首先需要明确单元的类型,在结构有限元分析中主要有以下一些单元类型:平面应力单元、平面应变单元、轴对称实体单元、空间实体单元、板单元、壳单元、轴对称壳单元、杆单元、梁单元、弹簧单元、间隙单元、质量单元、摩擦单元、刚体单元和约束单元等。根据不同的分类方法,上述单元可以分成以下不同的形式。?3。按照维度进行单元分类 根据单元的维数特征,单元可以分为一维单元、二维单元和三维单元。?一维单元的网格为一条直线或者曲线。直线表示由两个节点确定的线性单元。曲线代表由两个以上的节点确定的高次单元,或者由具有确定形状的线性单元。杆单元、梁单元和轴对称壳单元属于一维单元,如图1~图3所示。 ?二维单元的网 格是一个平面或者曲面,它没有厚度方向的尺寸.这类单元包括平面单元、轴对称实体单元、板单元、壳单元和复合材料壳单元等,如图4所示。二维单元的形状通常具有三角形和四边形两种,在使用自动网格剖分时,这类单元要求的几何形状是表面模型或者实体模型的边界面。采用薄壳单元通常具有相当好的计算效率。
??三维单元的网格具有空间三个方向的尺寸,其形状具有四面体、五面体和六面体,这类单元包括空间实体单元和厚壳单元,如图5所示.在自动网格划分时,它要求的是几何模型是实体模型(厚壳单元是曲面也可以)。 ? 4.按照插值函数进行单元分类 根据单元插值函数多项式的最高阶数多少,单元可以分为线性单元、二次单元、三次单元和更高次的单元。 线性单元具有线性形式的插值函数,其网格通常只具有角节点而无边节点,网格边界为直线或者平面.这类单元的优点是节点数量少,在精度要求不高或者结果数据梯度不太大的情况下,采用线性单元可以得到较小的模型规模.但是由于单元位移函数是线性的,单元内的位移呈线性变化,而应力是常数,因此会造成单元间的应力不连续,单元边界上存在着应力突变,如图6所示。
ANSYS有限元分析中的网格划分
ANSYS有限元分析中的网格划分 有限元分析中的网格划分好坏直接关系到模型计算的准确性。本文简述了网格划分应用的基本理论,并以ANSYS限元分析中的网格划分为实例对象,详细讲述了网格划分基本理论及其在工程中的实际应用,具有一定的指导意义。 作者: 张洪才 关键字: CAE ANSYS 网格划分有限元 1 引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 2 ANSYS网格划分的指导思想 ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材料的体积自锁等问题ANSYS软件平台提供了网格映射划分和自由适应划分的策略。映射划分用于曲线、曲面、实体的网格划分方法,可使用三角形、四边形、四面体、五面体和六面体,通过指定单元边长、网格数量等参数对网格进行严格控制,映射划分只用于规则的几何图素,对于裁剪曲面或者空间自由曲面等复杂几何体则难以控制。自由网格划分用于空间自由曲面和复杂实体,采用三角形、四边形、四面体进行划分,采用网格数量、边长及曲率来控制网格的质量。 3 ANSYS网格划分基本原则 3.1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。 图1 位移精度和计算时间随网格数量的变化 图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随