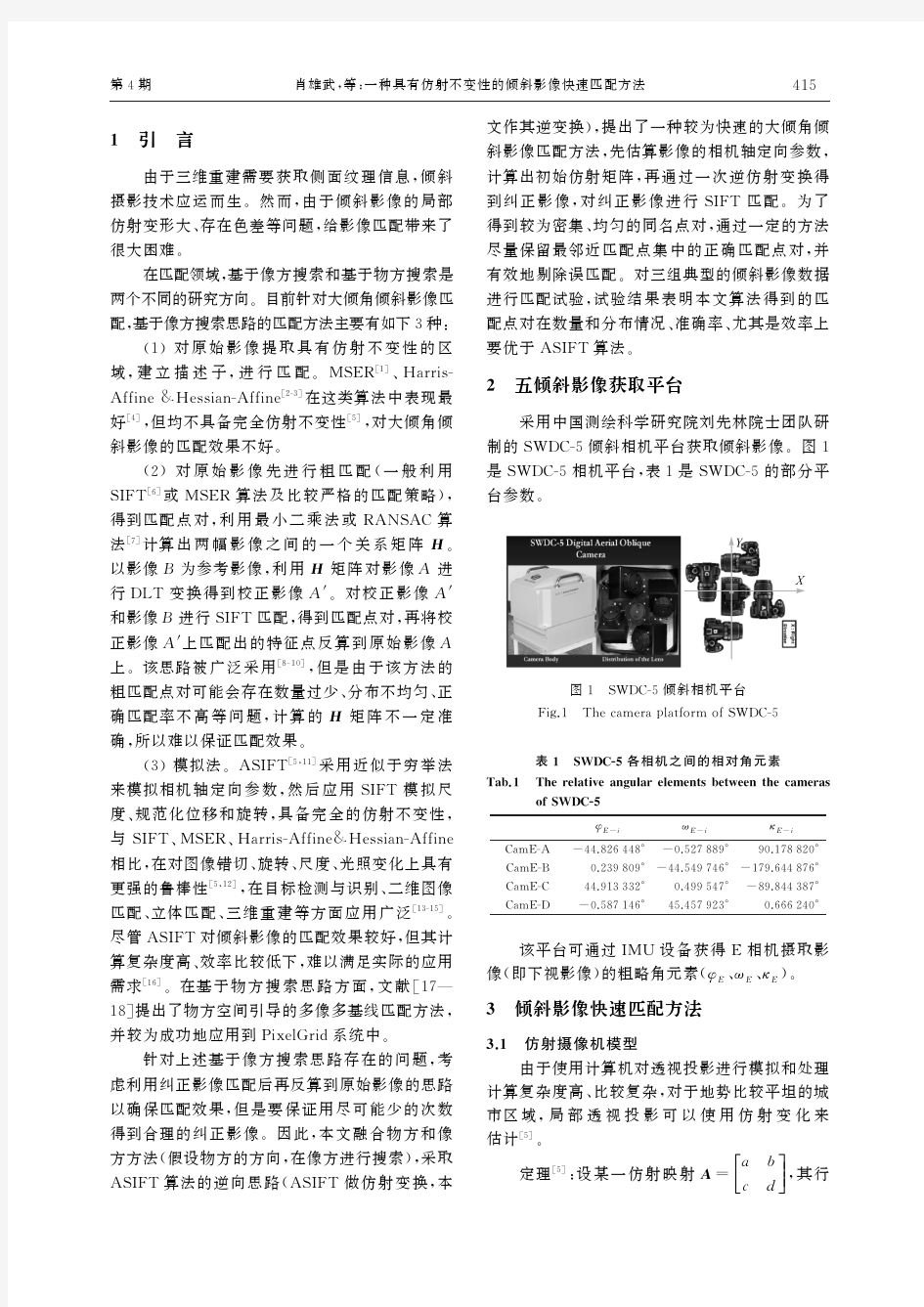
一种具有仿射不变性的倾斜影像快速匹配方法

第5章二次曲线作业
第5章二次曲线作业 1.填空选择题 (1) 二阶曲线x 2-2xy +y 2-y +2=0是( ) (A )抛物线 (B )双曲线 (C )实椭圆 (D )虚椭圆 (2)二阶曲线上的射影变换由 对应点唯一决定。 (3)二阶曲线323121232221 226x x x x x x x x x ++-++=0是( ) (A) 两条实直线 (B)双曲线 (C)非退化的长圆曲线 (D)两条重合直线 (4)在仿射平面上,下列二阶曲线方程中( )所代表的二阶曲线退化为两条虚相交直线。 (A )02221=-x x (B )02221=+x x (C )02321=-x x (D )023 21=+x x (5)依据配极原则,若P 点的极线通过Q ,则 (6)若A ,B ,C 和A ',B ',C '为共面二直线的两组共线点,如果BC '和B 'C 交于L ,CA '和C 'A 交于M ,AB '和A 'B 交于N ,那么 ,就是巴卜斯定理。 1. 两个成射影对应的线束031=-x x λ与032=-x x μ)1(=+μλ所构成的二阶曲线方 程。 2. 设三点形ABC 与A ′B ′C ′同时外切于一个二次曲线,求证它们也同时内接于一个二 次曲线。 3. 如果一个平行四边形内接于一个有心二次曲线,求证:它的两条对角线是二次曲线的直 径,而且它的两边平行于一对共轭直径。 4. 求证:过一定点(不在渐近线上)所作的二阶曲线诸弦终点的轨迹是另一条二阶曲线。 5. 在射影平面上给定五个点,求由它们确定的二阶曲线方程。 (1)A (0,0,1),B (1,1,0),C (0,1,-1),D (3,-2,0),E (1,-1,2); (2)A (1,0,0),B (0,1,0),C (0,0,1),D (1,1,1),E (321,,a a a ). 6. 判断二阶曲线01242222=+++++y x y xy x 的类型并求中心及过(1,1)点的直径 及其共轭直径。 7. 求下列双曲线的渐近线方程。 (1)0232=---+y x y xy (2)02=-a xy 8. 求点关于二阶曲线的极线。 (1) 点(5,1,7), 二阶曲线024632313221232221=---++x x x x x x x x x (2) 点(1,1,1), 二阶曲线022433132212221=+--+x x x x x x x x
第5章 基于两幅图像的仿射重构与欧氏重构
第五章基于两幅图像的仿射重构与欧氏重构 上一章我们利用多视图(至少需要三幅图像),求解摄像机内参数,从而由射影重构直接实现欧氏重构。但在某些场合我们仅有两幅图像,能否由射影重构来实现欧氏重构?换句话说,我们能否从两幅图像来求解摄像机的内参数?如果没有摄像机的运动或场景的结构信息,基本矩阵是两幅图像间的唯一约束,它只能构成摄像机内参数的两个独立约束,而摄像机一般有5个内参数,因此从二幅图像我们不可能确定摄像机的内参数。所以,仅有两幅图像,而没有摄像机的运动或场景的结构信息可利用时,我们不可能从射影重构来实现欧氏重构。因为在实际应用中,控制摄像机作纯平移、纯旋转等运动是比较困难的,尤其是在手持拍摄的情况下更是如此,所以本章将主要讨论当场景的结构具有什么样的信息时,我们可能通过两幅图像由射影重构来实现欧氏重构。 本章内容:(1)讨论在不求解摄像机内参数的情况下,如何从射影重构(这里主要指求解两幅图像间的基本矩阵)实现仿射重构。(2)证明了可逆矩阵为无穷远平面单应矩阵的充分条件,以及从基本矩阵不能唯一确定无穷远平面单应矩阵。(3)系统地分析了如何利用场景中的结构信息,来唯一地确定无穷远平面的单应矩阵,以及如何通过绝对二次曲线的像求解将仿射重构变换为欧氏重构的单应矩阵。(4)总结了三种关于绝对二次曲线的像的约束,并利用这些约束求解绝对二次曲线的像,进而实现从仿射重构恢复欧氏重构。 在本章中,我们仍假定摄像机在运动(运动参数未知)过程中其内参数是保持不变的。 5.1从射影重构到仿射重构 5.1.1仿射重构的本质 仿射重构的数学定义如下: x 假设摄像机从2个视点对P个三维空间物体点拍摄2幅图像,其中 j (j=1,2,…,P)为第j个三维空间物体点,它在第i(i=1,2)幅图像上的像点为)(i m, j
仿射变换
仿射变换
————————————————————————————————作者:————————————————————————————————日期:
第四章保距变换和仿射变换 本章教学目的:通过本章的学习,使学生掌握保距变换和仿射变换这两类重要的几何变换,从而深化几何学的研究,并掌握解决几何问题的一个有效方法。 本章教学重点:(1)保距变换和仿射变换的定义和性质; (2)仿射变换的基本定理; (3)保距变换和仿射变换的变换公式; (4)图形的仿射分类与仿射性质。 本章教学难点:仿射变换的性质和基本定理;仿射变换的变换公式的求法。 本章教学内容: §1 平面的仿射变换与保距变换 1.1――对应与可逆变换 集合X到集合Y的一个映射f:X→Y是把X中的点对应到Y中的点的一个法则,即?x∈X,都决定Y中的一个元素f(x),称为点x在f下的像。对X的一个子集A,记 f(A)={f(a)|a∈A}, 它是Y的一个子集,称为A在f下的像。对Y的一个子集B,记 f-1(B)={x∈X|f(x)∈B}, 称为B在F下的完全原像,它是X的子集。 如果f是X到Y的映射,g上Y到Z的映射,则它们的复合上X到Z的映射,记作 gf: X→Z,规定为 g f(x)=g(f(x)),?x∈X. 对A?X, gf(A)=g(f(A)); 对C?Z, (g f)-1(C)=f-1(g-1(C)). 映射的复合无交换律,但有结合律。 映射f: X→X称为X上的一个变换,idX: X→X,?x∈X,id X(x)=x,称为X的恒同变换。 对映射f: X→Y,如果有映射g:Y→X,使得 g f= idX:X→X,fg=idY:Y→Y, 则说f是可逆映射,称g是f的逆映射。 如果在映射f: X→Y下X的不同点的像一定不同,则称f是单射。如果f(X)=Y,则称f是满射。 如果映射f: X→Y既是单射,又是是满射,则称f为——对应。此时?f-1f=id X,, ff-1= idY,于是f是可逆映射,并且f的逆映射是f-1。 一个集合X到自身的可逆映射称为X上的可逆变换。 1.2平面上的变换群 平移取定平行于平面的一个向量u,规定π的变换P u:π→π为:?A∈π,令P u AP(A)=u的点。称P u为π上的一个平移,称向量u是P u的平移量。(A)是使得 u
第一部分仿射几何学的概念
高等几何需掌握的基本概念与方法 第一部分 仿射几何学的概念 一、平行投影与仿射对应 1.说明在一般情况下,仿射对应时对应点的连线不都是平行的。 2.在什么情况下,一般仿射对应时对应点的连线都互相平行。 3.两相交平面间的透视仿射对应有对应轴,如果有对应轴一般仿射对应时没有对应轴,那么这个仿射对应实质上仍然是透视放射对应。 二、仿射对应的不变性质与不变量 1.证明:三角形的重心是仿射对应下的不变性质。 2.证明:平行四边形的中心是仿射对应下的不变性质。 3.证明:梯形在仿射对应下仍是梯形。 4.说明:两个全等的矩形在仿射下对应于两个等积的平行四边形。 三、平面内的仿射变换及其决定 1.给出透视放射变换的对应轴 即对应点',P P ;求作已知三角形的对应图形。 已知:对应轴L 及一对对应点P ,P '; 求作:ABC ?的对应图形。 2.在第一题条件下,求作已知正方形的对应图形。 已知:对应轴L 及一对对应点P ,P '; 求作:正方形ABCD 的对应图形 3.在题一条件下,做已知圆的对应图形。 已知:对应轴L 及一对对应点P ,P '; 求作:圆O 的对应图形。 4.给定由两个三角形321,,P P P 为'3'2'1,,P P P 所决定的仿射变换,求做在此仿射变换下平面 内任意一点A 的对应点' A 。 5.给定一个梯形ABCD ,并且已知梯形中的三角形ABC 在仿射变换ABC 在仿射变换下的对应三角形'''C B A 。求做这梯形第四点D 的对应点。 C 6.给定一个正五角形,而且已知定点A , C B ,在仿射变换下的对应点''',,C B A ,求作 E D ,两点的对应点'D 与'E 。
不变特征
不变特征 0引言 图像局部特征的研究已经有很长的历史,早期研究可以追溯到20世纪70年代的Momvec算子。文献中存在大量关于角点、边缘、blob和区域等局部特征的研究方法。近年来区分性强、对多种几何和光度变换具有不变性的局部不变特征在宽基线匹配、特定目标识别、目标类别识别、图像及视频检索、机器人导航、纹理识别和数据挖掘等多个领域内获得广泛的应用,是国内外的研究热点。 局部不变特征是指局部特征的检测或描述对图像的各种变化,例如几何变换、光度变换、卷积变换、视角变化等保持不变。局部不变特征的基本思想是提取图像内容的本质属性特征,这些特征与图像内容的具体表现形式无关或具有自适应性(即表现形式变化时特征提取自适应的变化以描述相同的图像内容)。局部不变特征通常存在一个局部支撑邻域,与经典的图像分割算法不同,局部支撑邻域可能是图像的任何子集,支撑区域的边界不一定对应图像外观(例如颜色或纹理)的变化。 局部不变特征不仅能够在观测条件变化大、遮挡和杂乱干扰的情况下获得可靠的匹配,而且能够有效的描述图像内容进行图像检索或场景、目标识别等。局部不变特征可以克服语义层次图像分割的需要。从复杂背景中分割出前景目标是十分困难的课题,基于低层特征的方法很难实现有意义的分割,把图像内容表示为局部不变区域的集合(多个区域可能存在重合,图像中一些部分也可能不存在局部不变区域),可以回避分割问题。基于局部不变特征的方法本质上是对图像内容进行隐式分割,局部不变特征既可能位于感兴趣的前景目标上也可能位于背景或目标边界上,后续的高层处理需要基于局部不变特征提取感兴趣的信息。 局部不变特征的研究包含3个基本问题:一是局部不变特征的检测,二是局部不变特征的描述,三是局部不变特征的匹配。根据不同的准则,局部不变特征的研究方法可以分为不同的类别,按照使用的色调空间的不同可以分为局部灰度不变特征和局部彩色不变特征;按照特征层次的不同可以分为角点不变特征、blob不变特征和区域不变特征;按照几何变换不变性的自由度可以分为平移不变特征、旋转不变特征、尺度不变特征、欧氏不变特征、相似不变特征、仿射不变特征和投影不变特征;按照处理思路的不同可以分为基于轮廓曲率的不变特征、
仿射变换仿射平面与投影变换平面
仿射平面与投影平面 第一章仿射几何学 本章内容的安排在于揭示一种思想方法,从观察到概念形成到不变量系统再到代数系统,这种安排思想也充分反映了历史上射影几何建立过程中综合方法与解析方法各有所长交替作用互相影响的发展历程。本节研究的内容来自于生活、自然与生产建设实践,如正交变换是从研究我们生活空间中物体位置改变的最简单的情形移动、转动和镜面反射开始的,仿射变换则是从太阳光的照射开始的。因此在本章的学习中应注重于培养观察能力。 《数学发现的艺术》中是这样描述“观察”与“归纳”的:“观察是有意知觉的高级形式,它与有意注意结合在一起,与思维相联系。怎样进行观察?需要注意三点:一是有意识、有目标,处处留心,总想‘找岔儿’,从中发现点什么,否则就会熟视无睹,看等于不看;二是要有基础,有必要的相关知识,否则难以看出‘门道儿’,而只能是‘外行看热闹’;三是要有方法,否则就看不到‘点子’上,抓不住要领。在观察中,要特别注意从个别想到一般,从平常中发现异常”;而“归纳是由个别事例向关于这一类事物的一般性的过渡,是一种对经验、以实验观察结果进行去粗取精、去伪存真的综合处理方法。人们用归纳法清理事实,概括经验,处理资料,从而形成概念,发现规律”。 通过本章学习,首先对观察、归纳应该有一个较为深刻的认识,为在以后的学习中能熟练应用观察而打下良好的基础,其次对数学研究的目标之一——对象的结构——有一个初步的了解。 12
13 §1 正交变换 本单元分两个部分介绍正交变换,其一是解析几何中坐标变换的复习,主要通过讨论刚体运动中的特例——平移、旋转和反射,揭示其中最基本的不变量——距离,进而提炼出正交变换的概念。其二是利用不变量系统建立相应的坐标系,从而引入解析法,用代数方法解决正交变换的结构问题。 一、基本概念 实例 (a) 平移是沿一定的方向推移物体的过程,建立适当的坐标系,就有 平移0X l : ? íì+=¢+=¢00y y y x x x , 即 0X X X +=¢; (b) 旋转是物体绕着固定点转动的过程,建立适当的坐标系,就有 旋转q r : ?íì+=¢-=¢q q q q cos sin sin cos y x y y x x , 即 X X ÷÷? ???è?-=¢q q q q cos sin sin cos ; (c) 反射是关于一条固定直线的对称,建立适当的坐标系,就有 反射x r : ?íì-=¢=¢y y x x , 即 X X ÷÷? ???è?-=¢1001。 这三种变换是平面上物体运动的最基本方式,它们的组合就形成了物体在平面上的丰富多彩的运动方式。这三种变
尺度不变特征
SIFT特征分析与源码解读 分类:机器视觉与模式识别2013-11-19 22:28 10人阅读评论(0) 收藏举报 目录(?)[+] SIFT(Scale-invariant feature transform)是一种检测局部特征的算法,该算法通过求一幅图中的特征点(interest points,or corner points)及其有关scale 和orientation 的描述子得到特征并进行图像特征点匹配,获得了良好效果,详细解析如下: 算法描述 SIFT特征不只具有尺度不变性,即使改变旋转角度,图像亮度或拍摄视角,仍然能够得到好的检测效果。整个算法分为以下几个部分:1. 构建尺度空间 这是一个初始化操作,尺度空间理论目的是模拟图像数据的多尺度特征。 高斯卷积核是实现尺度变换的唯一线性核,于是一副二维图像的尺度空间定义为: 其中G(x,y,σ) 是尺度可变高斯函数 (x,y)是空间坐标,是尺度坐标。σ大小决定图像的平滑程度,大尺度对应图像的概貌特征,小尺度对应图像的细节特征。大的σ值对应粗糙尺度(低分辨率),反之,对应精细尺度(高分辨率)。为了有效的在尺度空间检测到稳定的关键点,提出了高斯差分尺度空间(DOG scale-space)。利用不同尺度的高斯差分核与图像卷积生成。 下图所示不同σ下图像尺度空间: 关于尺度空间的理解说明:2kσ中的2是必须的,尺度空间是连续的。在 Lowe的论文中,将第0层的初始尺度定为1.6(最模糊),图片的初始尺度定为0.5(最清晰). 在检测极值点前对原始图像的高斯平滑以致图像丢失高频信息,所以Lowe 建议在建立尺度空间前首先对原始图像长宽扩展一倍,以保留原始图像信息,增加特征点数量。尺度越大图像越模糊。
坐标变换与二次曲线的分类
第三章 坐标变换与二次曲线的分类 本章教学目的:通过本章的学习,掌握仿射坐标变换的一般理论,理解和掌握二次曲线的类型,掌握用方程的系数判别二次曲线的类型,不变量,掌握圆锥曲线的仿射特征组, 度量特征。 本章教学重点:(1) 平面的仿射变换与保距变换, (2) 仿射变换基本定理 本章教学难点:(1) 用坐标法研究仿射变换 (2) 图形的仿射分类与仿射性质 本章教学内容: 第一节 仿射坐标变换的一般理论 一 过渡矩阵、向量和点的坐标变换公式 1 向量的坐标变换公式 在空间中取定两个仿射坐标系,它们的标架分别为231 ,,,I O e e e ??? ? 和''''' 123,,,I O e e e ???? 。设向量α在I 和'I 中的坐标(),,x y z 和()''',,x y z 。又设' 1e ,' 2e ,' 3e 在I 中的坐标依次为 ()112131,,c c c ,()122232,,c c c ,()132333,,c c c , 即 '1111212313 ' 2121222323 '3 131232333e c e c e c e e c e c e c e e c e c e c e ?=++?=++??=++?, 于是由坐标的定义得到α在I 中的坐标为 ''' 111213''' 212223''' 313233x c x c y c z y c x c y c z z c x c y c z ?=++?=++??=++? , ()3.1 用矩阵写出为 ' 11 1213'212223'31 32 33x c c c x y c c c y z c c c z ???????? ????=?????? ???????????? ()3.1 a 称 ()3.1和()3.1a 为向量的坐标变换公式, ()3.1a 中的矩阵
一种完全仿射不变量的图像比较法
GuoshenY u CMAP,Ecole Polytechnique, 91128 Palaiseau Cedex,France Jean-Michel Morel* CMLA,ENS Cachan,61av.du President Wilson,Cachan 94235,France 文摘 一种完全仿射不变量的图像比较法,对Affine-SIFT(ASIFT)作出简要介绍。当SIFT仅遵循四个参数即缩放、旋转和平移时是完全不变的,新方法对两个剩下参数: 定义相机轴方向和定义相机角度方向。针对任何预测;模拟所有的视图都取决于这两个参数是否可行。这个方法可以依靠识别特征所进行的非常大的仿射扭曲来衡量一个新的参数,过渡倾斜。先进的方法过渡倾斜几乎不超过2 (SIFT)、2.5(Harris- Affine,Hessian -Affine)和10个(MSER)。ASIFT能处理过渡倾斜在36和更高的(见图1)。 索引词——影像匹配,仿射不变性,尺度不变,放射正常化,SIFT。 1.介绍 局部图像检测器通过图像比较按其增量不变性属性可进行分类。他们都是平移不变的。Harris 角点检测[3]是旋转不变的。这Harris –Lap lace(拉普斯),Hessian(海赛函数)-Laplace和DOG(Difference –of -Gaussian(高斯函数))区域检测器[8、10、6,2]是旋转不变和尺度不变的。一些基于力矩区域检测器[5,1],包括Harris -Affine(仿射)Hess ian-Affine区域[9,10]检测器,一个边缘检测点[17],一个[4]熵检测,两个水平线检测的MSER (“最稳定极值[7]地区”)和LLD (“水平线描述符”)[15]的设计是仿射不变的转变。MSER,特别说明,已被证实通常比其他仿射不变检测效果更好,紧随其后的是海赛-仿射和哈里斯-仿射(12、8、10)。这些方法通过修补局部斑块,区域,或相当经历了一个未知的仿射变换。归一化变换后他们得到一个标准的对象,仿射变换的影响已经消除。然而,当一个较大比例变换出现时 (事实上比3大),SIFT仍优于所有的其他方法[6]。事实上,实践证明数学上的[14],SIFT是完全尺度不变的,指出[6]没有完全尺度的归一化方法或仿射不变性:“然而,这些方
第五章二次曲线
第5章 二次曲线 5、4 二次曲线的仿射性质 前面在射影平面上,讨论了二次曲线的射影性质.接下来,在射影平面上取一直线为无穷远直线,这时的平面为仿射平面,讨论二次曲线的仿射性质. 5.4.1 二次曲线的中心和直径 我们只对非退化的二次曲线进行讨论.假设在二次曲线的方程 0=∑j i ij x x a 中, 0≠ij a .由上一节的讨论可知,极点与极线是一一对应的,那么仿射平面上的唯一特殊的直 线无穷远直线应有唯一的极点,于是有如下定义. 定义5.6 关于一条二次曲线Γ,若无穷远直线的极点为有限点,则称此点为Γ的中心,这 时称Γ为有心的二次曲线. 若极点为无穷远点,则Γ在此处与无穷远直线相切,称Γ为无 心二次曲线. 事实上,设无穷远直线∞l 关于Γ的极点为C ,过C 作任一直线,与二次曲线Γ有两个 交点1P ,2P , 与无穷远直线有一个交点P (见图5-7).由极点和极线的定义可知 ().1,21-=P P CP 由于P 是无穷远点,于是 11 2 =PP PP 。但是 ()1,1 2 2121-=?=PP PP CP CP P P CP 。 所以 12 1 -=CP CP 。 图5-7这说明C 是直线段21P P 的中点,换句话讲,通过C 点的任一弦都以C 为中心,这与欧氏几