一种基于 PWM的直流电机驱动电路设计
一种基于PWM 的直流电机驱动电路设计 蒋送君1,赵明明2,王彪3
南京航空航天大学自动化学院,南京(210016)
E-mail :jsj18504@https://www.360docs.net/doc/1316450160.html,
摘 要:本文介绍了一种基于PWM (Pulse Width Modulation)信号、采用H 型全桥对直流电机进行调压调速的驱动电路。由AT89C52单片机产生的PWM 信号,经光耦隔离、放大后,送给集成驱动芯片IR2111,然后驱动由功率MOSFET(Metal Oxide Semiconductor Field Effect Transistor)组成的H 桥,控制直流电机的转速和转向。本文还采用简单模拟电路为驱动电路设计了一种巧妙的过流保护方案。本文所设计的驱动电路已运用到实际的直流电机控制系统中,实践证明该电路运行稳定,具有良好的实用价值。
关键词:脉冲宽度调制 H 桥驱动电路 过流保护
中图分类号:TM1
1.引言
随着全控型第二代电力半导体器件(GTR 、GTO 、MOSFET 、IGBT 等)的发展,脉冲宽度调制(PWM )技术与开关功率电路成为功率应用中的主流技术;长期以来,直流电机以其良好的线性特性、优异的控制性能、成本低等特点成为大多数变速运动控制系统和闭环位置伺服控制系统的最佳选择[1]。因此,基于PWM 的直流电机调速技术在现代电气传动系统中被广泛应用。
本文所设计的驱动电路应用于某精确达位电动转台的控制系统中。在该系统中,单片机输出PWM 信号,该信号经光耦隔离后,驱动由功率MOSFET 组成的H 桥,从而实现对直流电机的调压调速;另一方面,角位传感器测量的实时角位信息反馈到单片机,采用仿人控制算法调节电机转速,从而实现转台位置闭环伺服控制。
2.直流PWM 调速基本原理
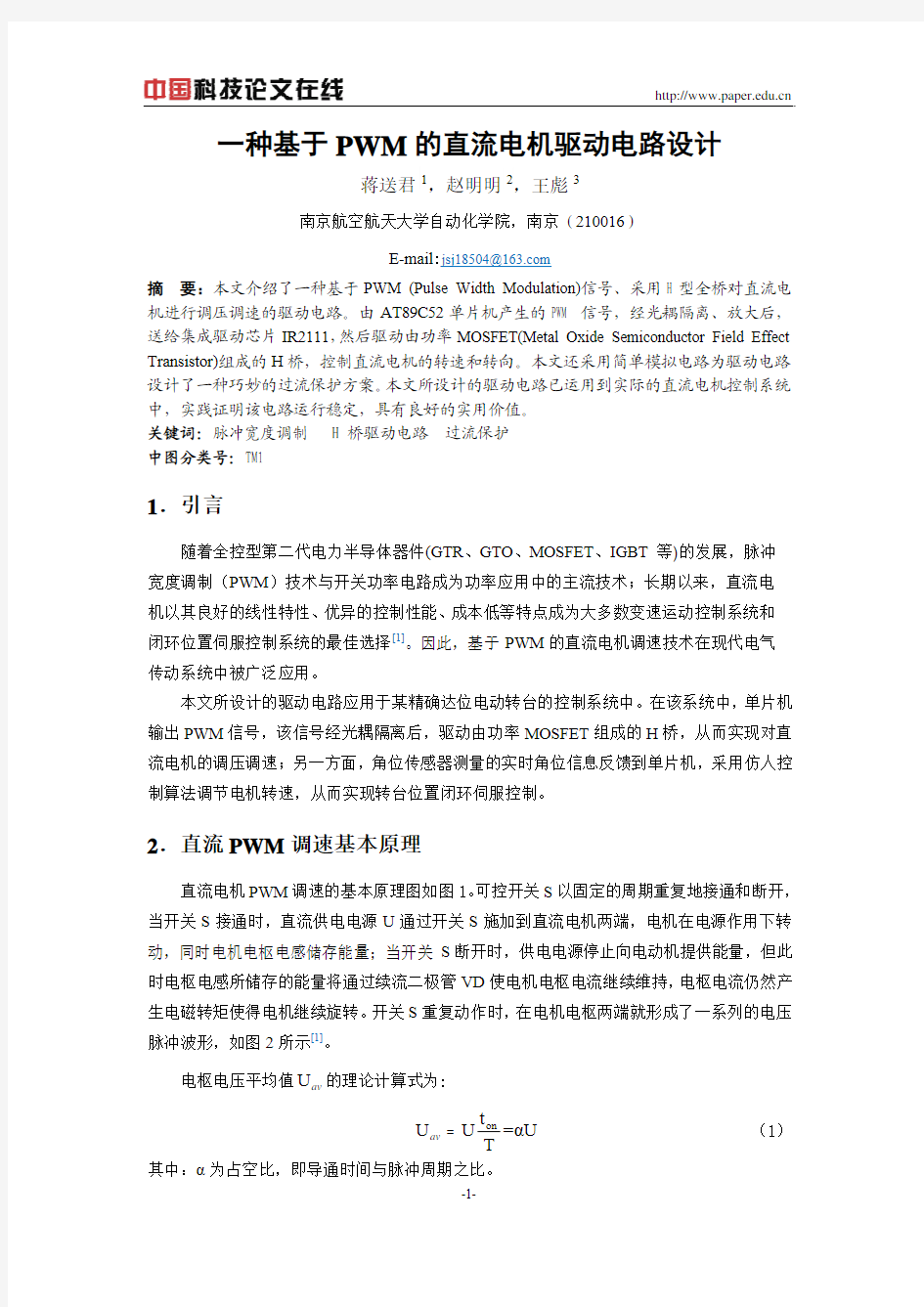
直流电机PWM 调速的基本原理图如图1。可控开关S 以固定的周期重复地接通和断开,当开关S 接通时,直流供电电源U 通过开关S 施加到直流电机两端,电机在电源作用下转动,同时电机电枢电感储存能量;当开关S 断开时,供电电源停止向电动机提供能量,但此时电枢电感所储存的能量将通过续流二极管VD 使电机电枢电流继续维持,电枢电流仍然产生电磁转矩使得电机继续旋转。开关S 重复动作时,在电机电枢两端就形成了一系列的电压脉冲波形,如图2所示[1]。
电枢电压平均值的理论计算式为:
U av on t U U =αU T
av (1) 其中:α为占空比,即导通时间与脉冲周期之比。
由式(1)可知,平均电压由占空比及电源电压决定,保持开关频率恒定,改变占空比能够相应地改变平均电压,从而实现了直流电动机的调压调速。
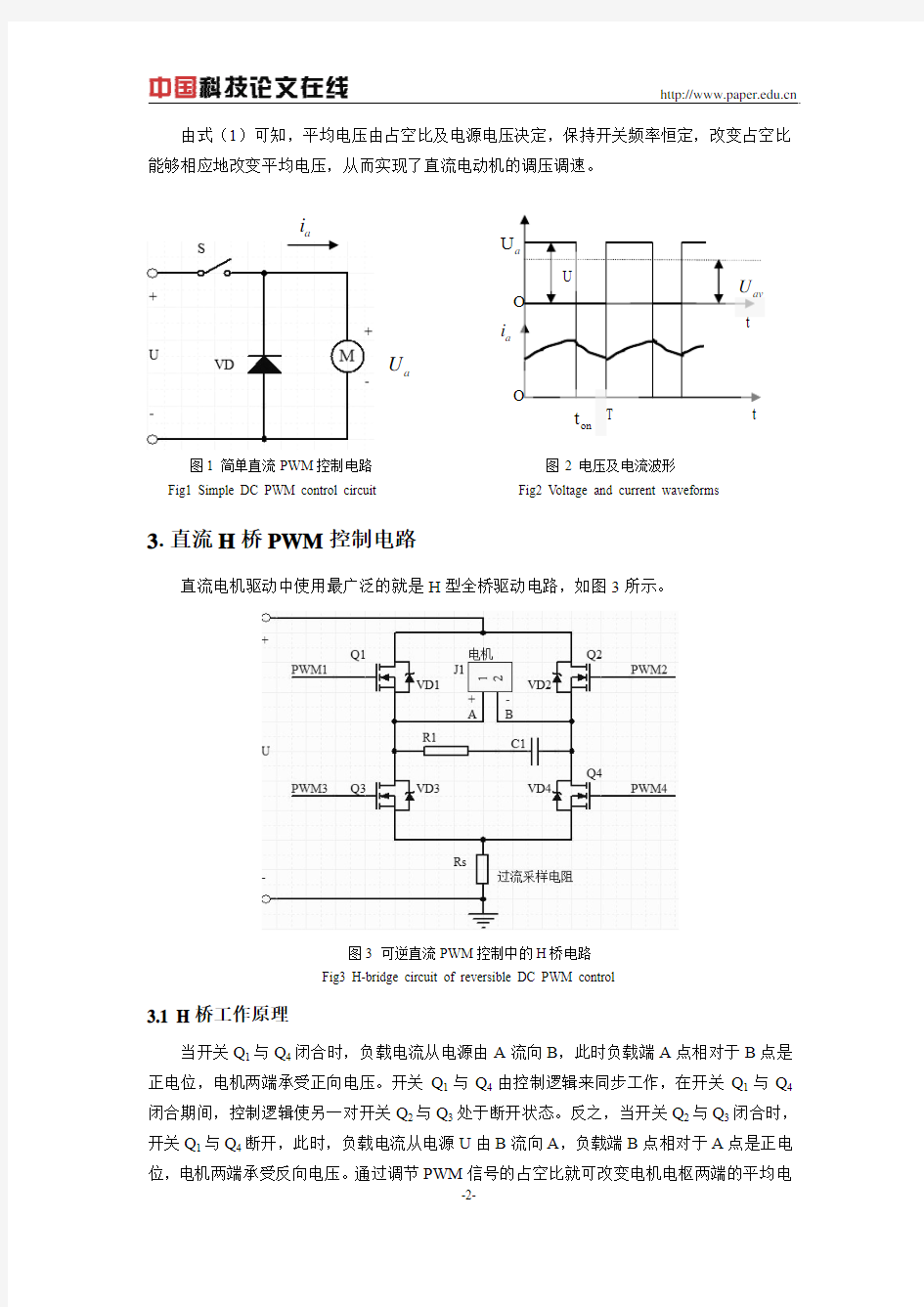
a i 图1 简单直流PWM 控制电路 图2 电压及电流波形 Fig1 Simple DC PWM control circuit Fig2 V oltage and current waveforms 3.直流H 桥PWM 控制电路 直流电机驱动中使用最广泛的就是H 型全桥驱动电路,如图3所示。 图3 可逆直流PWM 控制中的H 桥电路 Fig3 H-bridge circuit of reversible DC PWM control 3.1 H 桥工作原理 当开关Q 1与Q 4闭合时,负载电流从电源由A 流向B ,此时负载端A 点相对于B 点是正电位,电机两端承受正向电压。开关Q 1与Q 4由控制逻辑来同步工作,在开关Q 1与Q 4闭合期间,控制逻辑使另一对开关Q 2与Q 3处于断开状态。反之,当开关Q 2与Q 3闭合时,开关Q 1与Q 4断开,此时,负载电流从电源U 由B 流向A ,负载端B 点相对于A 点是正电位,电机两端承受反向电压。通过调节PWM 信号的占空比就可改变电机电枢两端的平均电a U
压,从而控制电机的转速或方向[4]。当PWM信号占空比α>50%时,电枢两端电压平均值为正,电机正向转动;当α<50%时,电枢两端电压平均值为负,电机反向转动;当α=50%时,电机电枢电压平均值为0,电机停转,但此时电枢两端电压的瞬时值并不为0,而是幅值接近直流电源电压U的方波。
与功率开关并联的二极管为快恢复二极管,作为续流二极管使用。当Q1、Q4的PWM 信号变为低电平后,功率管Q1、Q4关断而Q2、Q3饱和导通。电枢两端所加电压为-U,此时,电枢电流方向不能立刻改变,必须通过二极管VD2、VD3续流。同理,当Q2、Q3的PWM 信号变为低电平后,电机通过二极管VD1、VD4续流。
3.2 H桥器件选择
本系统中,选择功率MOSFET作为开关器件。功率MOSFET是压控元件,具有输入阻抗大、开关速度快、无二次击穿现象等特点[2]。此处,选取N沟道的功率MOSFET IRF530作为开关器件(自带续流二极管)。Rs为过流采样电阻,当流过主回路的电流增加时,采样电阻两端电压随之增加,过流保护电路检测该电压达到某定值时,便会对驱动电路实行过流保护。R1和C1则组成放电回路,消耗电机电感中存储的能量。其中,R1要用阻值在千欧级、功率在5W以上的水泥电阻,阻值的具体大小要在不同的电路应用中调整确定。
3.3 工作频率选择
要使电路稳定的工作,需要合适地选择PWM的频率。如果频率选择过低,输出到电机两端电压的低频纹波较大,会对电机的平稳运行造成影响,而且低频的PWM信号会使直流电机在运行的过程中产生很大的噪音,极大影响转台操作人员的工作环境;如果频率选择过高,由于光耦、IR2111、MOSFET等器件的开关特性的限制,不可能输出较为理想的方波,这将会使输出的PWM波形发生畸变,无法有效的控制直流电机的运转。经过多次实践表明,此电路的PWM工作频率选择20KHz为宜。此频率在超声波频段范围内,可以消除电机在工作过程中的噪音。
4.IR2111驱动电路
该电路中,采用MOSFET和IGBT专用集成驱动芯片IR2111对IRF530进行栅极驱动。IR2111内置自举工作单元,栅极驱动电压范围宽,单通道施密特逻辑输入,输入与TTL和CMOS电平兼容,高端输出与输入同相,低端输出经死区时间调整后与输入反向,可同时驱动同一桥臂上的两只功率MOSFET[3]。
4.1 自举原理
IR2111的悬浮自举技术是指,不管功率开关器件源极电压多少,通过自举电容和自举二极管的工作,总能保证待驱动功率器件的栅极与源极之间的电压为10~20V,即能驱动该功率器件正常工作。IR2111内置的自举工作单元本质上是电荷泵电路,电荷泵电路
的简单自举原理介绍如下。
图4 自举原理
Fig4 Bootstrap principle
如图4所示,电容C 的a 端通过二极管D 接V cc ,电容C 的b 端接幅值V in 的方波。当b 点电位为0时,D 导通,V cc 开始对电容C 充电,直到节点a 的电位达到V cc (假设二极管D 为理想二极管);当b 点电位上升至高电平V in 时,因为电容两端电压不能突变,此时a 点电位上升为V cc +V in 。所以,a 点的电压就是一个方波,最大值是V cc +V in ,最小值是V cc 。可见,输出端电压平均值将高于V cc ,其波形跟随输入波形的变化而变化,但始终与输入维持一个稳定的差值,实现了自举。
4.2 IR2111外围电路及器件选择
IR2111外围电路如下图5所示。单片机输出的PWM 信号经光耦PC817后,输出至IR2111输入端,此处的光耦对PWM 信号起到隔离、电平转换和功率放大的作用。图5中,R 1、R 2为光耦上拉电阻,其值根据所用光耦的输入和输出的电流参数决定;C 1为电源滤波电容,C 2为自举电容,D 1为自举二极管,R 3、R 4为栅极驱动电阻。
图5 IR2111驱动功率MOSFET 电路
Fig5 IR2111 driving Power MOSFET circuit
4.2.1 自举电容选择
自举电容C 2大小的选择取决于开关频率及MOSFET 输入电容充放电要求等。下列公式列出了自举电容应该提供的最小电荷要求:
qbs(max)cbs(leak)g ls I I Q =2Q +
+Q +f f bs (2)
其中,Q g :高端器件栅极电荷;
f :工作频率;
I cbs(leak):自举电容漏电流;
Q ls :每个周期内,电平转换电路中的电荷要求;
I qbs(max):高端驱动电路最大静态电流。
自举电容必须能够提供这些电荷,并且保持其电压,否则V BS (VB 与VS 间的电压)将会有很大的电压纹波,并且可能会低于IR2111内置欠压值,使高端无输出并停止工作,因此电容C 2的电荷应是最小值的二倍。由C=Q/V 可得最小电容值:
qbs(max)cbs(leak)g Is cc f Ls I I 2[2Q ++Q +]f
C V -V -V ≥f (3)
其中, V f :自举二极管正向压降;
V Ls :低端器件压降或高端负载压降;
V cc :器件供电电压,此处为V +12。
因此,查阅相关器件手册、结合工作条件即可求得理论上的自举电容值。工程实际中, 该自举电容一般由一个大电容和一个小电容并联组成,并联小电容用来吸收高频毛刺电压。根据IR2111器件手册上给出的20KHz 左右工作条件下的参考自举电容值,由于本文所设计电路的工作频率为20KHz ,因此选择1μF 和0.1μF 的电容并联使用,实践已验证该自举电容满足要求。
4.2.2 自举二极管选择
图5中,D 1为自举二极管,作为续流二极管使用,其耐压值必须超出主电路直流母线电压并且必须为快恢复二极管,以减小从自举电容向电源V cc 的回馈电荷。该二极管的额定电流值由自举电容提供的最小电荷Q bs 与工作频率f 乘积得到,即:
F b s I =Q
f ? (4) 此处,选择FR157作为自举二极管。
4.2.3 栅极电阻选择
图5中,R 3、R 4为栅极驱动电阻,主要用来限制MOSFET 的栅极电流,由于MOSFET 的开通和关断是通过栅极电路的充放电实现的,所以,栅极电阻将对MOSFET 的动态特性产生极大的影响。
当栅极电阻选择较小时,栅极电容充放电较快,开关时间和开关损耗减小(低频条件下,开关损耗可作为次要因素考虑),可避免du/dt 带来的误导通,增强了功率器件的耐固性,但同时只能承受较小的栅极噪声,并可能导致栅极-源极之间的电容同驱动电路引线的寄生电感产生振荡问题。较小的栅极电阻还使得MOSFET 开通时di/dt 变大,会导致较高的du/dt ,增加了自举二极管的浪涌电压[3]。
当栅极电阻选择较大时,功率器件开通速度较慢,应考虑栅极的瞬态电压和驱动电流。一般而言,功率越大的MOSFET 栅极电阻越小,同时对栅极驱动电路的布线也有严格要求,
应使引线电感尽可能小。此处,查阅IR2111工作手册,结合实际的工作条件,栅极电阻选为10Ω,实践中已验证了本设计中栅极电阻选择的合理性。
4.3 IR2111死区延迟特性
实际控制中,需要不断地使电机在正转和反转之间切换,也就是在Q1、Q4导通且Q2、Q3关断到Q1、Q4关断且Q2、Q3导通这两种状态间转换。这种情况理论上要求两组控制信号完全互补,但是由于实际的开关器件都存在导通和关断时间,绝对的互补控制逻辑会导致上下桥臂直通短路。为了避免直通短路且保证各个开关管动作的协同性和同步性,两组控制信号理论上要求互为倒相,而实际必须相差一个足够长的死区时间,即保证在某一功率器件导通的同时,同桥臂的功率器件可靠的截止,防止桥臂直通短路。IR2111内部通过逻辑门器件实现了死区时间的延迟,即由IR2111高端和低端输出的波形如图6所示。其中,DT即为定义的死区时间,IR2111典型死区时间是700ns。
图6 IR2111死区延时特性
Fig6 IR2111 Dead time delay feature
5.继电器过流保护电路
考虑到电机主回路需通过较大电流,过大的电流会损坏功率MOSFET,因此,设计主回路过流保护电路是必要的。若在主回路中安装保险丝来进行过流保护,则保险丝烧坏便要拆开主机箱替换,较为麻烦。本电路中,采用继电器并结合三极管等外围器件组成过流保护电路,主回路一旦过流,便由继电器稳定地切断主回路,保护了功率器件。
电路原理图如图7所示,此电路的工作原理如下:
主回路启动时,可能存在瞬间过冲电流,此时,过电流流经R1给电容E3充电,从而流经采样电阻Rs的瞬时电流减小,选择较大电容值,使E3两端的充电电压较低,从而T1截止,T2也截止,主回路不会被误切断。当电路稳定工作时,若主回路未过流,则T1截止,从而T2也截止,直流母线电压U接入主回路,电路正常工作。当主回路过流时,采样电阻两端能达到一定的预设电压,此电压能使得T1饱和导通,T1的集电极拉为低电位,从而T2饱和导通,继电器控制端便有电流通过,继电器开关吸合,U与主回路断开,LED亮,即
为过流指示信号;直流母线电压U经R3、R2的分压,到达T1基极的电位高于T1发射极而低于T1集电极,于是,T1维持导通,使得T2也维持导通,从而实现了继电器的自锁,常闭端维持断开,而常开端维持吸合,稳定地切断主回路。要使电路恢复正常工作状态,只需切断电源,重新上电即可。
图7 继电器过流保护电路
Fig7 Over-current protection circuit with relay
6.结论
本文中所设计的基于PWM的H桥直流电机驱动电路已成功应用于某型号二轴精密达位电动转台的控制系统中,实践证明,该驱动电路运行稳定可靠,电机的调速性能和达位精度良好。另外本文所设计的继电器过流保护电路非常实用。本文对所设计电路各个部分的工作原理和器件参数的选取都作了详细说明,整个驱动电路能够很好地满足一般性直流调整系统的需求。
参考文献
[1] 孙立志.PWM与数字化电动机控制技术应用[M].北京:中国电力出版社,2008.
[2] 徐德鸿.现代电力电子器件原理与应用技术[M].北京:机械工业出版社,2008.
[3] 周志敏,周纪海,纪爱华.IGBT和IPM及其应用电路[M].北京:人民邮电出版社,2006.
[4] 袁涛.H桥功率驱动电路的设计研究[D].电子科技大学,2006.
[5] 宋健,姜军生,赵文亮等.基于单片机的直流电动机PWM调速系统[J].农机化研究,2006,1(1):
102-103.
[6] 梁亦铂,王正茂,何涛.全数字直流电机调速系统的原理及数学模型[J].中小型电机,2001,28(6):
17-20.
Design of DC Motor Drive Circuit Based on PWM
JIANG Songjun1, ZHAO Mingming2, WANG Biao3
College of Automation, Nanjing University of Aeronautics and Astronautics, Nanjing (210016)
Abstract:
This paper describes a drive circuit, which is based on Pulse Width Modulation, and using the H-type full bridge to regulate the voltage and the speed of the DC motor. The PWM signal, which is used to control the rotation speed and direction of the DC motor, is generated by the AT89C52 single-chip microcontroller, isolated and amplified by the Opt-coupler, and transmitted to the integration drive chip IR2111, and then drives the H-bridge, which is constituted by the power MOSFET. In this paper, a simple analog circuit, which is an ingenuity way of over-current protection, is designed to protect the drive circuit. The drive circuit, designed in this paper, has been applied to the actual DC motor control system. The practice has verified that this circuit run stably and had a good practical value.
Key words:Pulse Width Modulation; H-bridge driving circuit; over-current protection
直流电机驱动电路设计
直流电机驱动电路设计 一、直流电机驱动电路的设计目标 在直流电机驱动电路的设计中,主要考虑一下几点: 1. 功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电 器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。 如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。 2. 性能:对于PWM调速的电机驱动电路,主要有以下性能指标。 1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。 2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3)对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。 4)对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5)可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 二、三极管-电阻作栅极驱动
1.输入与电平转换部分: 输入信号线由DATA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。 高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2.7V基准电压比较,转换成接近功率电源电压幅度的方波信号。KF347的输入电压范围不能接近负电源电压,否则会出错。因此在运放输入端增加了防止电压范围溢出的二极管。输入端的两个电阻一个用来限流,一个用来在输入悬空时把输入端拉到低电平。 不能用LM339或其他任何开路输出的比较器代替运放,因为开路输出的高电平状态输出阻抗在1千欧以上,压降较大,后面一级的三极管将无法截止。 2.栅极驱动部分: 后面三极管和电阻,稳压管组成的电路进一步放大信号,驱动场效应管的栅极并利用场效应管本身的栅极电容(大约 1000pF)进行延时,防止H桥上下两臂的场效应管同时导通(“共态导通”)造成电源短路。 当运放输出端为低电平(约为1V至2V,不能完全达到零)时,下面的三极管截止,场效应管导通。上面的三极管导通,场效应管截止,输出为高电平。当运放输出端为高电平(约为VCC-(1V至2V),不能完全达到VCC)时,下面的三极管导通,场效
直流电机驱动电路设计
应用越来越广泛的直流电机,驱动电路设计 Source:电子元件技术| Publishing Date:2009-03-20 中心论题: ?在直流电机驱动电路的设计中,主要考虑功能和性能等方面的因素 ?分别介绍几种不同的栅极驱动电路并比较其性能优缺点 ?介绍PWM调速的实现算法及硬件电路 ?介绍步进电机的驱动方案 解决方案: ?根据实际电路情况以及要求仔细选择驱动电路 ?使用循环位移算法及模拟电路实现PWM调速 ?对每个电机的相应时刻设定相应的分频比值,同时用一个变量进行计数可实现步进电机的分频调速 直流电机驱动电路的设计目标 在直流电机驱动电路的设计中,主要考虑一下几点: 功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。 性能:对于PWM调速的电机驱动电路,主要有以下性能指标。 1。输出电流和电压围,它决定着电路能驱动多大功率的电机。 2。效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3。对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。
4。对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5。可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 三极管-电阻作栅极驱动 1.输入与电平转换部分: 输入信号线由DATA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。 高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2。7V 基准电压比较,转换成接近功率电源电压幅度的方波信号。KF347的输入电压围不能接近负电源电压,否则会出错。因此在运放输入端增加了防止电压围溢出的二极管。输入端的两个电阻一个用来限流,一个用来在输入悬空时把输入端拉到低电平。
无刷直流电机的组成及工作原理
无刷直流电机的组成及工作原理 2.1 引言 直流无刷电动机一般由电子换相电路、转子位置检测电路和电动机本体三部分组成,电子换相电路一般由控制部分和驱动部分组成,而对转子位置的检测一般用位置传感器来完成。工作时,控制器根据位置传感器测得的电机转子位置有序的触发驱动电路中的各个功率管,进行有序换流,以驱动直流电动机。下文从无刷直流电动机的三个部分对其发展进行分析。 2.2 无刷直流电机的组成 2.2.1 电动机本体 无刷直流电动机在电磁结构上和有刷直流电动机基本一样,但它的电枢绕组放在定子上,转子采用的重量、简化了结构、提高了性能,使其可*性得以提高。无刷电动机的发展与永磁材料的发展是分不开的,磁性材料的发展过程基本上经历了以下几个发展阶段:铝镍钴,铁氧体磁性材料,钕铁硼(NdFeB)。钕铁硼有高磁能积,它的出现引起了磁性材料的一场革命。第三代钕铁硼永磁材料的应用,进一步减少了电机的用铜量,促使无刷电机向高效率、小型化、节能的方向发展。 目前,为提高电动机的功率密度,出现了横向磁场永磁电机,其定子齿槽与电枢线圈在空间位置上相互垂直,电机中的主磁通沿电机轴向流通,这种结构提高了气隙磁密,能够提供比传统电机大得多的输出转矩。该类型电机正处于研究开发阶段。 2.2.2 电子换相电路 控制电路:无刷直流电动机通过控制驱动电路中的功率开关器件,来控制电机的转速、转向、转矩以及保护电机,包括过流、过压、过热等保护。控制电路最初采用模拟电路,控制比较简单。如果将电路数字化,许多硬件工作可以直接由软件完成,可以减少硬件电路,提高其可靠性,同时可以提高控制电路抗干扰的能力,因而控制电路由模拟电路发展到数字电路。 驱动电路:驱动电路输出电功率,驱动电动机的电枢绕组,并受控于控制电路。驱动电路由大功率开关器件组成。正是由于晶闸管的出现,直流电动机才从有刷实现到无刷的飞跃。但由于晶闸管是只具备控制接通,而无自关断能力的半控性开关器件,其开关频率较低,不能满足无刷直流电动机性能的进一步提高。随着电力电子技术的飞速发展,出现了全控型的功率开关器件,其中有可关断晶体管(GTO)、电力场效应晶体管(MOSFET)、金属栅双极性晶体管IGBT 模块、集成门极换流晶闸管(IGCT)及近年新开发的电子注入增强栅晶体管(IEGT)。随着这些功率器件性能的不断提高,相应的无刷电动机的驱动电路也获得了飞速发展。目前,全控型开关器件正在逐渐取代线路复杂、体积庞大、功能指标低的普通晶闸管,驱动电路已从线性放大状态转换为脉宽调制的开关状态,相应的电路组成也由功率管分立电路转成模块化集成电路,为驱动电路实现智能化、高频化、小型化创造了条件。 2.2.3 转子位置检测电路
直流电机控制系统设计
直流电机控制系统设计
XX大学 课程设计 (论文) 题目直流电机控制系统设计 班级 学号 学生姓名 指导教师
沈阳航空航天大学 课程设计任务书 课程名称专业基础课程设计 院(系)自动化学院专业测控技术与仪器 班级学号姓名 课程设计题目直流电机控制系统设计 课程设计时间: 2012年7 月9 日至2012年7 月20 日 课程设计的内容及要求: 1.内容 利用51单片机开发板设计并制作一个直流电机控制系统。系统能够实时控制电机的正转、反转、启动、停止、加速、减速等。 2.要求 (1)掌握直流电机的工作原理及编程方法。 (2)掌握直流电机驱动电路的设计方法。 (3)制定设计方案,绘制系统工作框图,给出系统电路原理图。 (4)用汇编或C语言进行程序设计与调试。 (5)完成系统硬件电路的设计。 (6)撰写一篇7000字左右的课程设计报告。 指导教师年月日 负责教师年月日
学生签字年月日 目录 0 前言 (1) 1 总体方案设计 (2) 1.1 系统方案 (2) 1.2 系统构成 (2) 1.3 电路工作原理 (2) 1.4 方案选择 (3) 2 硬件电路设计 (3) 2.1 系统分析与硬件设计 (3) 2.2 单片机AT89C52 (3) 2.3 复位电路和时钟电路 (4) 2.4 直流电机驱动电路设计 (4) 2.5 键盘电路设计 (4) 3软件设计 (5) 3.1 应用软件的编制和调试 (5) 3.2 程序总体设计 (5) 3.3 仿真图形 (7) 4 调试分析 (9) 5 结论及进一步设想 (9) 参考文献 (10) 课设体会 (11) 附录1 电路原理图 (12) 附录2 程序清单 (13)
无刷直流电机的驱动及控制
无刷直流电机驱动 James P. Johnson, Caterpiller公司 本章的题目是无刷直流电动机及其驱动。无刷直流电动机(BLDC)的运行仿效了有刷并励直流电动机或是永磁直流电动机的运行。通过将原直流电动机的定子、转子内外对调—变成采用包含电枢绕组的交流定子和产生磁场的转子使得该仿效得以可能。正如本章中要进一步讨论的,输入到BLDC定子绕组中的交流电流必须与转子位置同步更变,以便保持磁场定向,或优化定子电流与转子磁通的相互作用,类似于有刷直流电动机中换向器、电刷对绕组的作用。该原理的实际运用只能在开关电子学新发展的今天方可出现。BLDC电机控制是今天世界上发展最快的运动控制技术。可以预见,随着BLDC的优点愈益被大家所熟知且燃油成本持续增加,BLDC必然会进一步广泛运用。 2011-01-30 23.1 BLDC基本原理 在众文献中无刷直流电动机有许多定义。NEMA标准《运动/定位控制电动机和控制》中对“无刷直流电动机”的定义是:“无刷直流电动机是具有永久磁铁转子并具有转轴位置监测来实施电子换向的旋转自同步电机。不论其驱动电子装置是否与电动机集成在一起还是彼此分离,只要满足这一定义均为所指。”
图23.1 无刷直流电机构形 2011-01-31 若干类型的电机和驱动被归类于无刷直流电机,它们包括: 1 永磁同步电机(PMSMs); 2 梯形反电势(back - EMF)表面安装磁铁无刷直流电机; 3 正弦形表面安装磁铁无刷直流电机; 4 内嵌式磁铁无刷直流电机; 5 电机与驱动装置组合式无刷直流电机; 6 轴向磁通无刷直流电机。 图23.1给出了几种较常见的无刷直流电机的构形图。永磁同步电机反电势是正弦形的,其绕组如同其他交流电机一样通常不是满距,或是接近满距的集中式绕组。许多无刷直流电
直流电机控制电路集锦
直流电机控制电路集锦 直流电机的类型 按:直流电机在家用电器、电子仪器设备、电子玩具、录相机及各种自动控制中都有广泛的应用。但对它的使用和控制,很多读者还不熟悉,而且其技术资料亦难于查找。直流电机控制电路集锦,将使读者“得来全不费功夫”! 在现代电子产品中,自动控制系统,电子仪器设备、家用电器、电子玩具等等方面,直流电机都得到了广泛的应用。大家熟悉的录音机、电唱机、录相机、电子计算机等,都不能缺少直流电机。所以直流电机的控制是一门很实用的技术。本文将详细介绍各种直流电机的控制技术。 站长的几句说明:本文内容比较详实完整,但遗憾的是原稿的印刷质量和绘图的确很差,尽管采取了很多措施,有些图仍可能看不太清楚。 直流电机,大体上可分为四类: 第一类为有几相绕组的步进电机。这些步进电机,外加适当的序列脉冲,可使主轴转动一个精密的角度(通常在1.8°--7.5°之间)。只要施加合适的脉冲序列,电机可以按照人们的预定的速度或方向进行连续的转动。 步进电机用微处理器或专用步进电机驱动集成电路,很容易实现控制。例如常用的SAAl027或SAAl024专用步进电机控制电路。 步进电机广泛用于需要角度转动精确计量的地方。例如:机器人手臂的运动,高级字轮的字符选择,计算机驱动器的磁头控制,打印机的字头控制等,都要用到步进电机。 第二类为永磁式换流器直流电机,它的设计很简单,但使用极为广泛。当外加额定直流电压时,转速几乎相等。这类电机用于录音机、录相机、唱机或激光唱机等固定转速的机器或设备中。也用于变速范围很宽的驱动装置,例如:小型电钻、模型火车、电子玩具等。在这些应用中,它借助于电子控制电路的作用,使电机功能大大加强。 第三类是所谓的伺服电机,伺服电机是自动装置中的执行元件,它的最大特点是可控。在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小,除去控制信号电压后,伺服电机就立即停止转动。伺服电机应用甚广,几乎所有的自动控制系统中都需要用到。例如测速电机,它的输出正比于电机的速度;或者齿轮盒驱动电位器机构,它的输出正比于电位器移动的位置.当这类电机与适当的功率控制反馈环配合时,它的速度可以与外部振荡器频率精确锁定,或与外部位移控制旋钮进行锁定。 唱机或激光唱机的转盘常用伺服电机。天线转动系统,遥控模型飞机和舰船也都要用到伺服电机。 最后一类为两相低电压交流电机。这类电机通常是直流电源供给一个低频振荡器,然后再用低频低压的交流去驱动电机。这类电机偶尔也用在转盘驱动机构中。 步进电机的基本工作原理
直流电机驱动控制电路_NMosfet
1 引言 长期以来,直流电机以其良好的线性特性、优异的控制性能等特点成为大多数变速运动控制和闭环位置伺服控制系统的最佳选择。特别随着计算机在控制领域,高开关频率、全控型第二代电力半导体器件(GTR、GTO、MOSFET、IGBT等)的发展,以及脉宽调制(PWM)直流调速技术的应用,直流电机得到广泛应用。为适应小型直流电机的使用需求,各半导体厂商推出了直流电机控制专用集成电路,构成基于微处理器控制的直流电机伺服系统。但是,专用集成电路构成的直流电机驱动器的输出功率有限,不适合大功率直流电机驱动需求。因此采用N沟道增强型场效应管构建H桥,实现大功率直流电机驱动控制。该驱动电路能够满足各种类型直流电机需求,并具有快速、精确、高效、低功耗等特点,可直接与微处理器接口,可应用PWM技术实现直流电机调速控制。 2 直流电机驱动控制电路总体结构 直流电机驱动控制电路分为光电隔离电路、电机驱动逻辑电路、驱动信号放大电路、电荷泵电路、H桥功率驱动电路等四部分,其电路框图如图一 由图可以看出,电机驱动控制电路的外围接口简单。其主要控制信号有电机运转方向信号Dir电机调速信号PWM及电机制动信号Brake,Vcc为驱动逻辑电路部分提供电源,Vm为电机电源电压,M+、M-为直流电机接口。 在大功率驱动系统中,将驱动回路与控制回路电气隔离,减少驱动控制电路对外部控制电路的干扰。隔离后的控制信号经电机驱动逻辑电路产生电机逻辑控制信号,分别控制H桥的上下臂。由于H桥由大功率N沟道增强型场效应管构成,不能由电机逻辑控制信号直接驱动,必须经驱动信号放大电路和电荷泵电路对控制信号进行放大,然后驱动H桥功率驱动电路来驱动直流电机。 3 H桥功率驱动原理 直流电机驱动使用最广泛的就是H型全桥式电路,这种驱动电路方便地实现直流电机的四象限运行,分别对应正转、正转制动、反转、反转制动。H桥功率驱动原理图如图2所示。
直流电动机控制电路的设计
课程设计(论文) 题目名称直流电动机控制电路的设计 课程名称电力拖动基础课程设计 学生姓名周孝雄 学号0941202031 系、专业电气工程系、09自动化 指导教师邱雄迩 2011年12 月18 日
邵阳学院课程设计(论文)任务书 注: 1.此表由指导教师填写,经系、教研室审批,指导教师、学生签字后生效; 2.此表1式3份,学生、指导教师、教研室各1份。
指导教师(签字):学生(签字):
邵阳学院课程设计(论文)评阅表 学生姓名周孝雄学号0941202031 系电气工程系专业班级09自动化班 题目名称直流电动机控制电路的设计课程名称电力拖动基础一、学生自我总结 二、指导教师评定 注:1、本表是学生课程设计(论文)成绩评定的依据,装订在设计说明书(或论文)的“任务书”页后面;
当今,自动化控制系统在各行各业得到了广泛的应用和发展,而直流驱动控制作为电气传动的主流在现代化生产中起着主要作用。直流电动机应用如此之广,主要在于其采用了PWM脉宽调制电路来控制直流电动机的调速。在这里介绍了PWM脉宽产生的电路。该电路运用模拟电子电路基础知识完成,利用产生的方波信号带动负载转动。本设计原理简单,易于理解,电路实现简单。我们先概括介绍了电路中锁需要的电路模块,然后给出了整体的电路图,并做了测试及得出测试结果。 关键词:直流电动机,PWM,三极管
1绪论 (7) 1.1概述 (7) 1.2 直流电动机的基本理论 (7) 1.3直流脉宽调速系统 (10) 2 元器件介绍 (13) 2.1 SG2731 (13) 2.2 三极管C4466 和 A1693 (16) 3 系统设计方案 (17) 3.1直流电动机控制电路 (17) 4直流电动机控制电路的测试 (19) 4.1 测试步骤 (19) 4.2 测试结果 (19) 5实验总结 (21) 参考文献 (22)
较大功率直流电机驱动电路的设计方案
1 引言 直流电机具有优良的调速特性,调速平滑、方便、调速范围广,过载能力强,可以实现频繁的无级快速启动、制动和反转,能满足生产过程中自动化系统各种不同的特殊运行要求,因此在工业控制领域,直流电机得到了广泛的应用。 许多半导体公司推出了直流电机专用驱动芯片,但这些芯片多数只适合小功率直流电机,对于大功率直流电机的驱动,其集成芯片价格昂贵。基于此,本文详细分析和探讨了较大功率直流电机驱动电路设计中可能出现的各种问题,有针对性设计和实现了一款基于25D60-24A 的直流电机驱动电路。该电路驱动功率大,抗干扰能力强,具有广泛的应用前景。 2 H 桥功率驱动电路的设计 在直流电机中,可以采用GTR 集电极输出型和射极输出性驱动电路实现电机的驱动,但是它们都属于不可逆变速控制,其电流不能反向,无制动能力,也不能反向驱动,电机只能单方向旋转,因此这种驱动电路受到了很大的限制。对于可逆变速控制, H 桥型互补对称式驱动电路使用最为广泛。可逆驱动允许电流反向,可以实现直流电机的四象限运行,有效实现电机的正、反转控制。而电机速度的控制主要有三种,调节电枢电压、减弱励磁磁通、改变电枢回路电阻。三种方法各有优缺点,改变电枢回路电阻只能实现有级调速,减弱磁通虽然能实现平滑调速,但这种方法的调速范围不大,一般都是配合变压调速使用。因此在直流调速系统中,都是以变压调速为主,通过PWM(Pulse Width Mo dulation)信号占空比的调节改变电枢电压的大小,从而实现电机的平滑调速。 2.1 H 桥驱动原理 要控制电机的正反转,需要给电机提供正反向电压,这就需要四路开关去控制电机两个输入端的电压。当开关S1 和S4 闭合时,电流从电机左端流向电机的右端,电机沿一个方向旋转;当开关S2 和S3 闭合时,电流从电机右端流向电机左端,电机沿另一个方向旋转, H 桥驱动原理等效电路图如图1 所示。
有刷直流马达驱动电路
有刷直流马达驱动电路MX612 有刷直流马达驱动电路 MX612 概述 该产品为电池供电的玩具、低压或者电池供电的运动控制应用提供了一种集成的有刷直流马达驱动解决方案。电路内部集成了采用N沟和P沟功率MOSFET设计的H桥驱动电路,适合于驱动有刷直流马达或者驱动步进马达的一个绕组。该电路具备较宽的工作电压范围(从2V到10V),最大持续输出电流达到1.2A,最大峰值输出电流达到2.5A。 该驱动电路内置过热保护电路。通过驱动电路的负载电流远大于电路的最大持续电流时,受封装散热能力限制,电路内部芯片的结温将会迅速升高,一旦超过设定值(典型值150℃),内部电路将立即关断输出功率管,切断负载电流,避免温度持续升高造成塑料封装冒烟、起火等安全隐患。内置的温度迟滞电路,确保电路恢复到安全温度后,才允许重新对电路进行控制。 特性 ●低待机电流(小于0.1uA); ●低静态工作电流; ●集成的H桥驱动电路; ●内置防共态导通电路; ●低导通内阻的功率MOSFET管; ●内置带迟滞效应的过热保护电路(TSD); ●抗静电等级:3KV (HBM)。 典型应用 ● 2-6节AA/AAA干电池供电的玩具马达驱动; ● 2-6节镍-氢/镍-镉充电电池供电的玩具马达驱动; ● 1-2节锂电池供电的马达驱动
引脚排列 引脚定义 功能框图
注:D A JA T A表示电路工作的环境温度,θJA为封装的热阻。150℃表示电路的最高工作结温。 (2)、电路功耗的计算方法: P =I2*R 其中P为电路功耗,I为持续输出电流,R为电路的导通内阻。电路功耗P必须小于最大功耗P D (3)、人体模型,100pF电容通过1.5KΩ 电阻放电。 注:(1)、逻辑控制电源VCC与功率电源VDD内部完全独立,可分别供电。当逻辑控制电源VCC掉电之后,电路将进入待机模式。 (2)、持续输出电流测试条件为:电路贴装在PCB上测试,SOP8封装的测试PCB板尺寸为25mm*15mm。
直流电机控制系统设计范本
直流电机控制系统 设计
XX大学 课程设计 (论文)题目直流电机控制系统设计 班级 学号 学生姓名 指导教师
沈阳航空航天大学 课程设计任务书 课程名称专业基础课程设计 院(系)自动化学院专业测控技术与仪器 班级学号姓名 课程设计题目直流电机控制系统设计 课程设计时间: 7 月 9 日至 7 月 20 日 课程设计的内容及要求: 1.内容 利用51单片机开发板设计并制作一个直流电机控制系统。系统能够实时控制电机的正转、反转、启动、停止、加速、减速等。 2.要求 (1)掌握直流电机的工作原理及编程方法。 (2)掌握直流电机驱动电路的设计方法。 (3)制定设计方案,绘制系统工作框图,给出系统电路原理图。 (4)用汇编或C语言进行程序设计与调试。 (5)完成系统硬件电路的设计。 (6)撰写一篇7000字左右的课程设计报告。
指导教师年月日 负责教师年月日 学生签字年月日 目录 0 前言...................................................................................... 错误!未定义书签。 1 总体方案设计 ...................................................................... 错误!未定义书签。 1.1 系统方案 ...................................................................... 错误!未定义书签。 1.2 系统构成 ...................................................................... 错误!未定义书签。 1.3 电路工作原理............................................................... 错误!未定义书签。 1.4 方案选择 ...................................................................... 错误!未定义书签。 2 硬件电路设计 ...................................................................... 错误!未定义书签。 2.1 系统分析与硬件设计................................................... 错误!未定义书签。 2.2 单片机AT89C52............................................................ 错误!未定义书签。 2.3 复位电路和时钟电路................................................... 错误!未定义书签。 2.4 直流电机驱动电路设计 ............................................... 错误!未定义书签。 2.5 键盘电路设计............................................................... 错误!未定义书签。 3 软件设计 ............................................................................ 错误!未定义书签。 3.1 应用软件的编制和调试 ............................................... 错误!未定义书签。 3.2 程序总体设计............................................................... 错误!未定义书签。 3.3 仿真图形 ...................................................................... 错误!未定义书签。 4 调试分析 .............................................................................. 错误!未定义书签。
直流无刷电机驱动原理
直流无刷电机的工作原理 直流无刷电机的优越性 直流电机具有响应快速、较大的起动转矩、从零转速至额定转速具备可提供额定转矩的性能,但直流电机的优点也正是它的缺点,因为直流电机要产生额定负载下恒定转矩的性能,则电 枢磁场与转子磁场须恒维持90°,这就要藉由碳刷及整流子。碳刷及整流子在电机转动时会 产生火花、碳粉因此除了会造成组件损坏之外,使用场合也受到限制。交流电机没有碳刷及 整流子,免维护、坚固、应用广,但特性上若要达到相当于直流电机的性能须用复杂控制技 术才能达到。现今半导体发展迅速功率组件切换频率加快许多,提升驱动电机的性能。微处 理机速度亦越来越快,可实现将交流电机控制置于一旋转的两轴直交坐标系统中,适当控制 交流电机在两轴电流分量,达到类似直流电机控制并有与直流电机相当的性能。 此外已有很多微处理机将控制电机必需的功能做在芯片中,而且体积越来越小;像模拟/数字转换器(Analog-to-digital converter,ADC)、脉冲宽度调制(pulse wide modulator,PWM)…等。直流无刷电机即是以电子方式控制交流电机换相,得到类似直流电机特性又没有直流电机机构上缺失的一种应用。 直流无刷电机的控制结构 直流无刷电机是同步电机的一种,也就是说电机转子的转速受电机定子旋转磁场的速度及转 子极数(P)影响: N=120.f / P。在转子极数固定情况下,改变定子旋转磁场的频率就可以改变转子的转速。直 流无刷电机即是将同步电机加上电子式控制(驱动器),控制定子旋转磁场的频率并将电机转子 的转速回授至控制中心反复校正,以期达到接近直流电机特性的方式。也就是说直流无刷电 机能够在额定负载范围内当负载变化时仍可以控制电机转子维持一定的转速。 直流无刷驱动器包括电源部及控制部如图(1) :电源部提供三相电源给电机,控制部则依需 求转换输入电源频率。
直流电机PWM调速与控制设计报告
综合设计报告 单位:自动化学院 学生姓名: 专业:测控技术与仪器 班级:0820801 学号: 指导老师: 成绩: 设计时间:2011 年12 月 重庆邮电大学自动化学院制
一、题目 直流电机调速与控制系统设计。 二、技术要求 设计直流电机调速与控制系统,要求如下: 1、学习直流电机调速与控制的基本原理; 2、了解直流电机速度脉冲检测原理; 3、利用51单片机和合适的电机驱动芯片设计控制器及速度检测电路; 4、使用C语言编写控制程序,通过实时串口能够完成和上位机的通信; 5、选择合适控制平台,绘制系统的组建结构图,给出完整的设计流程图。 6、要求电机能实现正反转控制; 7、系统具有实时显示电机速度功能; 8、电机的设定速度由电位器输入; 9、电机的速度调节误差应在允许的误差范围内。 三、给定条件 1、《直流电机驱动原理》,《单片机原理及接口技术》等参考资料; 2、电阻、电容等各种分离元件、IC、直流电机、电源等; 3、STC12C5A60S2单片机、LM298以及PC机; 四、设计 1. 确定总体方案; 2. 画出系统结构图; 3. 选择以电机控制芯片和单片机及速度检测电路,设计硬件电路; 4. 设计串口及通信程序,完成和上位机的通信; 5. 画出程序流程图并编写调试代码,完成报告;
直流电机调速与控制 摘要:当今社会,电动机作为最主要的机电能量转换装置,其应用范围已遍及国民经济的各个领域和人们的日常生活。无论是在工农业生产,交通运输,国防,航空航天,医疗卫生,商务和办公设备中,还是在日常生活的家用电器和消费电子产品(如电冰箱,空调,DVD等)中,都大量使用着各种各样的电动机。据资料显示,在所有动力资源中,百分之九十以上来自电动机。同样,我国生产的电能中有百分之六十是用于电动机的。电动机与人的生活息息相关,密不可分。电气时代,电动机的调速控制一般采用模拟法、PID控制等,对电动机的简单控制应用比较多。简单控制是指对电动机进行启动,制动,正反转控制和顺序控制。这类控制可通过继电器,光耦、可编程控制器和开关元件来实现。还有一类控制叫复杂控制,是指对电动机的转速,转角,转矩,电压,电流,功率等物理量进行控制。 本电机控制系统基于51内核的单片机设计,采用LM298直流电机驱动器,利用PWM 脉宽调制控制电机,并通过光耦管测速,经单片机I/O口定时采样,最后通过闭环反馈控制系统实现电机转速的精确控制,其中电机的设定速度由电位器经A/D通过输入,系统的状显示与控制由上位机实现。经过设计和调试,本控制系统能实现电机转速较小误差的控制,系统具有上位机显示转速和控制电机开启、停止和正反转等功能。具有一定的实际应用意义。关键字:直流电机、反馈控制、51内核、PWM脉宽调制、LM298 一、系统原理及功能概述 1、系统设计原理 本电机控制系统采用基于51内核的单片机设计,主要用于电机的测速与转速控制,硬件方面设计有可调电源模块,串口电路模块、电机测速模块、速度脉冲信号调理电路模块、直流电机驱动模块等电路;软件方面采用基于C语言的编程语言,能实现系统与上位机的通信,并实时显示电机的转速和控制电机的运行状态,如开启、停止、正反转等。 单片机选用了51升级系列的STC12c5a60s2作为主控制器,该芯片完全兼容之前较低版本的所有51指令,同时它还自带2路PWM控制器、2个定时器、2个串行口支持独立的波特率发生器、3路可编程时钟输出、8路10位AD转换器、一个SPI接口等,
直流电机控制设计
河南科技大学 课程设计说明书 课程名称现代电子系统课程设计题目直流电机控制设计 学院电子信息工程学院 班级电子信息科学与技术062班学生姓名**** 指导教师齐晶晶,张雷鸣 日期___2010年1月10号____
摘要 使用直流电源的电机叫做直流电机。只要把直流电机的端子接到直流电源上就可以简单使其运转。直流电机是一种具有优良控制特性的电机。因此,在角位移控制和速度控制的伺服系统中有着广泛的应用。为了调整直流电机的转速和输出转矩,可以采用改变电枢直流电压的方法来实现,主要的控制方法有线性控制方式和PWM(脉宽调制)控制方式。一般小功率电机平滑转速控制常采用线性控制方式,而大功率电机高效控制时,则常使用PWM控制方式。本文介绍的是利用FPGA实现PWM脉宽调制信号的产生和相应的用数字电路的方法实现的换档、正反向控制等。直流电机的转动速度调节则归结于对驱动脉宽的占空比的调节上,通过调节占空比而改变单位时间内直流电机的通电时间长短,即改变了电机的转速。转动方向可用功率放大电路和H 桥组成的正反向功率驱动电路来实现 直流电机控制电路主要由五部分组成: ●PWM脉宽调制信号产生电路:主要功能是产生pwm信号,并控制转速。 ●FPGA中正/反转方向控制:用2选1数据选择器控制电机的pwm信号的输入端,从而实现正反转。 ●由功率放大电路和H桥组成的正反转功率驱动电路: ●分频和去抖电路模块:通过两个维持阻塞D触发器实现消抖。 ●测量转速模块:通过红外线测量电机每转一周产生的脉冲实现转速测量。 关键词:速度调节、旋转方向控制、去抖动电路、数字显示转速、PWM、占空比、FPGA
直流电机H桥驱动原理和驱动电路选择L9110_L298N_LMD18200
在直流电机驱动电路的设计中,主要考虑一下几点: 1.功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机 即可,当电机需要双向转动时,可以使用由4 个功率元件组成的H 桥电路或者使用一个双刀双掷的继电器。如果不需要调速,只要使 用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM (脉冲宽度调制)调速。 2.性能:对于PWM 调速的电机驱动电路,主要有以下性能指标。 1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。 2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防 止共态导通(H 桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3)对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或 光电耦合器实现隔离。 4)对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5)可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 H桥驱动电路:H桥式电机驱动电路包括4个三极管和一个电机,因其外形酷似字母'H',所以称作H桥驱动电路。 要使电机M运转,必须使对角线上的一对三极管导通。例如当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。电机顺时针转动。当三极管Q2和Q3导通时,电流将从右至左流过电机,驱动电机逆时针方向转动。
直流电机控制系统设计
XX大学 课程设计 (论文) 题目直流电机控制系统设计 班级 学号 学生姓名 指导教师
航空航天大学 课程设计任务书 课程名称专业基础课程设计 院(系)自动化学院专业测控技术与仪器 班级学号 课程设计题目直流电机控制系统设计 课程设计时间: 2012年7 月9 日至2012年7 月20 日 课程设计的容及要求: 1.容 利用51单片机开发板设计并制作一个直流电机控制系统。系统能够实时控制电机的正转、反转、启动、停止、加速、减速等。 2.要求 (1)掌握直流电机的工作原理及编程方法。 (2)掌握直流电机驱动电路的设计方法。 (3)制定设计方案,绘制系统工作框图,给出系统电路原理图。 (4)用汇编或C语言进行程序设计与调试。 (5)完成系统硬件电路的设计。 (6)撰写一篇7000字左右的课程设计报告。 指导教师年月日 负责教师年月日
学生签字年月日 目录 0 前言 (1) 1 总体方案设计 (2) 1.1 系统方案 (2) 1.2 系统构成 (2) 1.3 电路工作原理 (2) 1.4 方案选择 (3) 2 硬件电路设计 (3) 2.1 系统分析与硬件设计 (3) 2.2 单片机AT89C52 (3) 2.3 复位电路和时钟电路 (4) 2.4 直流电机驱动电路设计 (4) 2.5 键盘电路设计 (4) 3 软件设计 (5) 3.1 应用软件的编制和调试 (5) 3.2 程序总体设计 (5) 3.3 仿真图形 (7) 4 调试分析 (9) 5 结论及进一步设想 (9) 参考文献 (10) 课设体会 (11)
附录1 电路原理图 (12) 附录2 程序清单 (13)
基于单片机的直流电机控制设计性实验报告
设计题目:直流电机控制电路设计 一设计目的 1 掌握单片机用PWM实现直流电机调整的基本方法,掌握直流电机的驱动原理。 2 学习模拟控制直流电机正转、反转、加速、减速的实现方法。 二设计要求 用已学的知识配合51单片机设计一个可以正转、反转或变速运动的直流电机控制电路,并用示波器观察其模拟变化状况。 三设计思路及原理 利用单片机对PWM信号的软件实现方法。MCS一51系列典型产品8051具有两个定时计数器。因为PWM信号软件实现的核心是单片机内部的定时器,所以通过控制定时计数器初值,从而可以实现从8051的任意输出口输出不同占空比的脉冲波形。从而实现对直流电动机的转速控制。 。AT89C51的P1.0—P1.2控制直流电机的快、慢、转向,低电平有效。P3.0为PWM波输出,P3.1为转向控制输出,P3.2为蜂鸣器。PWM控制DC电机转速,晶振为12M,利用定时器控制产生占空比可变的PWM波,按K1键,PWM值增加,则占空比增加,电机转快,按K2键,PWM值减少,则占空比减小,电机转慢,当PWM值增加到最大值255或者最小值1时,蜂鸣器将报警 四实验器材
DVCC试验箱导线若电源等器件 PROTUES仿真软件KRIL软件 五实验流程与程序 #include < reg51.h > sbit K1 =P1^0 ; 增加键 sbit K2 =P1^1 ; 减少键 sbit K3 =P1^2 ; 转向选择键 sbit PWMUOT =P3^0 ; PWM波输出 sbit turn_around =P3^1 ; 转向控制输出 sbit BEEP =P3^2 ; 蜂鸣器 unsigned int PWM; void Beep(void); void delay(unsigned int n); void main(void) { TMOD=0x11; //设置T0、T1为方式1,(16位定时器) TH0=0 ; 65536us延时常数{t=(65536-TH)/fose/12} TL0=0; TH1=PWM ; //脉宽调节,高8位 TL1=0; EA=1; //开总中断 ET0=1; //开T0中断
直流电机控制电路(伺服)
直流电机控制电路专辑—6 伺服电机是一种传统的电机。它是自动装置的执行元件。伺服电机的最大特点是可控。在有控制信号时,伺服电机就转动,且转速大小正比于控制电压的大小。去掉控制电压后,伺服电机就立即停止转动。伺服电机的应用甚广,几乎所有的自动控制系统都需要用到。在家电产品中,例如录相机、激光唱机等都是不可缺少的重要组成部分。 1.简单伺服电机的工作原理 图22示出了伺服电机的最简单的应用。电位器RV1由伺服电机带动。电机可选用电流不超过700mA,电压为12~24V的任一种伺服电机。图中RV1和RV2是接成惠斯登(Wheatstone)电桥。集成电路LM378是双路4瓦功率放大器,也以桥接方式构成电机驱动差分放大器。当RV2的任意变化,都将破坏电桥的平衡,使RV1—RV2之间产生一差分电压,并且加以放大后送至电机。电机将转动,拖动电位器RV1到新的位置,使电桥重新达到新的平衡。所以说,RV1是跟踪了RV2的运动。 图23是用方块图形式,画出了测速传感器伺服电机系统,能用作唱机转盘精密速度控制的原理图。电机用传统的皮带机构驱动转盘。转盘的边缘,用等间隔反射条文图形结构。用光电测速计进行监视和检测。光电测速计的输出信号正比于转盘的转速。把光电测速计输出信号的相位和频率,与标准振荡器的相位和频率进行比较,用它的误差信号控制电机驱动电路。因此,转盘的转速就精确地保持在额定转速上。额定转速的换档,可由操作开关控制。
这些控制电路,已有厂家做成专用的集成电路 2.数字比例伺服电机 伺服电机的最好类型之一,是用数字比例遥控系统。实际上这些装置是由三部份组成:采用集成电路、伺服电机、减速齿轮盒电位器机构。图24是这种系统的方块图。电路的驱动输入,是用周期为15ms而脉冲宽度为1~2ms的脉冲信号驱动。输入脉冲的宽度,控制伺服机械输出的位置。例如:1ms脉宽,位置在最左边;1.5ms在中是位置,2ms在最右边的位置 每一个输入脉冲分三路同时传送。一路触发1.5ms脉宽的固定脉冲发生器。一路输入触发脉冲发生器,第三路送入脉宽比较电路。用齿轮盒输出至RV1,控制可变宽度的脉冲发生器。这三种脉冲同时送到脉宽比较器后,一路确定电机驱动电路的方向。另一路送给脉宽扩展器,以控制伺服电机的速度,使得RV1迅速驱动机械位置输出跟随输入脉宽的任何变化。 上述伺服电机型常用于多路遥控系统。图25示出了四路数字比例控制系统的波形图。上述伺服电机型常用于多路遥控系统。图25示出了四路数字比例控制系统的波形图。 从图中可以看出是串行数据输入,经过译码器分出各路的控制信号。每一帧包含4ms 的同步脉冲,紧接在后面的是四路可变宽度(1~2ms)顺序的“路”脉冲。译码器将四路脉冲变换为并行形式,就能用于控制伺服电机。 3.数字伺服电机电路 数字伺服电机控制单元,可以买到现成的集成电路。例如ZN409CE或NE544N型伺服电机放大器集成电路。图26和图27示出了这两种集成电路的典型应用 。
常用电机驱动电路及原理
由于本人主要是搞软件的,所以硬件方面不是很了解,但是为了更好地相互学习,仅此整理出一份总结出来,有什么错误的地方还请大家积极的指出!供大家一起参考研究! 我们做的智能小车,要想出色的完成一场比赛,需要出色的控制策略!就整个智能车这个系统而言,我们的被控对象无外乎舵机和电机两个!通过对舵机的控制能够让我们的小车实时的纠正小车在赛道上的位置,完成转向!当然那些和我一样做平衡组的同学不必考虑舵机的问题!而电机是小车完成比赛的动力保障,同时平衡组的同学也需要通过对两路电机的差速控制,来控制小车的方向!所以选一个好的电机驱动电路非常必要! 常用的电机驱动有两种方式:一、采用集成电机驱动芯片;二、采用MOSFET和专用栅极驱动芯片自己搭。集成主要是飞思卡尔自己生产的33886芯片,还有就是L298芯片,其中298是个很好的芯片,其内部可以看成两个H桥,可以同时驱动两路电机,而且它也是我们驱动步进电机的一个良选!由于他们的驱动电流较小(33886最大5A持续工作,298最大2A持续工作),对于我们智能车来说不足以满足,但是电子设计大赛的时候可能会用到!所以想要详细了解他们的同学可以去查找他们的数据手册!在此只是提供他们的电路图,不作详细介绍! 33886运用电路图
下面着重介绍我们智能车可能使用的驱动电路。普遍使用的是英飞凌公司的半桥驱动芯片BTS7960搭成全桥驱动。其驱动电流约43A,而其升级产品BTS7970驱动电流能够达到70几安培!而且也有其可替代产品BTN79 70,它的驱动电流最大也能达七十几安!其内部结构基本相同如下: 每片芯片的内部有两个MOS管,当IN输入高电平时上边的MOS管导通,常称为高边MOS管,当IN输入低电平时,下边的MOS管导通,常称为低边MOS 管;当INH为高电平时使能整个芯片,芯片工作;当INH为低电平时,芯片不工作。其典型运用电路图如下图所示: EN1和EN2一般使用时我们直接接高电平,使整个电路始终处于工作状态!