ARM9-GEC2440开发板
GEC2440 开发板套件介绍
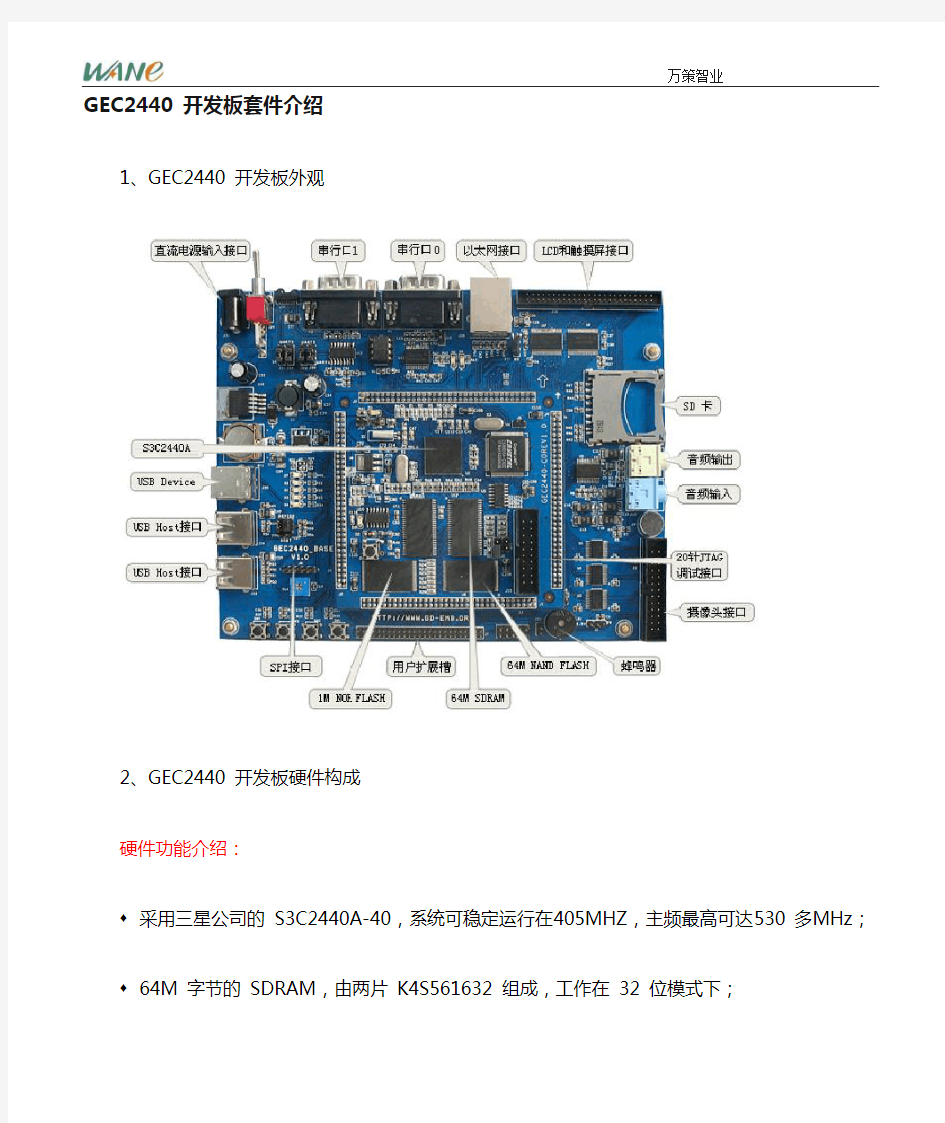
1、GEC2440 开发板外观
2、GEC2440 开发板硬件构成
硬件功能介绍:
◆采用三星公司的 S3C2440A-40,系统可稳定运行在405MHZ,主频最高可达530 多MHz;
◆ 64M 字节的 SDRAM,由两片 K4S561632 组成,工作在 32 位模式下;
◆ 64M 字节 NAND Flash,采用的是 K9F1208,可以兼容 16M,32M 或 128M 字节;
◆ 10M 以太网接口,采用的是 CS8900Q3,带传输和连接指示灯;
◆ LCD 和触摸屏接口;
◆ 2 个 USB HOST,S3C2440 内置的,符合 USB 1.1,其中一个 USB HOST 接口是复用的;
◆一个 USB Device,S3C2440 内置的,符合 USB 1.1;
◆支持音频输入和音频输出,音频模块由 S3C2440 的 IIS 音频总线接口和 UDA1341 音频编码解码器组成,板上还集成了一个 MIC,用于音频输入;
◆ 2 路 UART 串行口,波特率可高达 115200bps,并具有 RS232 电平转换电路,其中一路为完整串
口;
◆ SD 卡接口,兼容 SD Memory Card Protocol 1.0 和 SDIO Card Protocol 1.0;
◆ Embedded-ICE (20 脚标准 JTAG)接口和并口式 JTAG 接口,支持 ADS,SDT 软件的下载
和调试以及 FLASH 的烧写;
◆串行 EEPROM :AT24C02 4Kbytes EEPROM,IIC 接口;
◆SPI 接口;
◆数字摄像头接口;
◆蜂鸣器,4 个 LED 灯;
◆ 4 个按键;
◆开关电源,分布式电源供电;
◆3V 锂电池,提供RTC 电源;
3、硬件资源分配
3.1 地址空间分配以及片选信号定义
S3C2440 支持两种启动模式:一种是从 NAND FLASH 启动;一种是从外部 nGCS0 片选的 Nor Flash 启动。在这两种启动模式下,各片选的存储空间分配是不同的,这两种启动模式的存储分配图如下:
说明:SFR Area 为特殊寄存器地址空间
◆下面是器件地址空间分配和其片选定义
在进行器件地址说明之前,有一个点需要注意,nGCS0 片选的空间在不同的启动模式下,映射的器
件是不一样的。由上图可以知道:
-在 NAND FLASH 启动模式下,内部的 4K Bytes BootSRam 被映射到 nGCS0 片选的空间。
-在 Nor Flash 启动模式(非 NAND FLASH 启动模式)下,与 nGCS0 相连的外部存储器 Nor Flash 就被映射到 nGCS0 片选的空间。
3.2 接口资源及按键说明
4、熟悉gec2440_base_board、gec2440_core_board的原理图。
5、熟悉DNW工具;超级终端;USB及串口下载。
6、下栽GEC2440_APP.bin到SDRAM运行。
嵌入式机器人
嵌入式机器人 以嵌入式计算机为核心的嵌入式系统(Embedded System)是继IT网络技术之后,又一个新的技术发展方向 机器人技术的发展从来就是与嵌入式系统的发展紧密联系在一起的,机器人技术的研究就是嵌入式技术的应用,而嵌入式技术的发展必定促进机器人智能化水平。机器人技术的发展从来就是与嵌入式系统的发展紧密联系在一起的,机器人技术的研究就是嵌入式技术的应用,而嵌入式技术的发展必定促进机器人智能化水平。 现有的大多数机器人,都采用单片机作为控制单元,以8位和16位最为常见,其处理速度较低,没有操作系统,无法实现丰富的多任务功能,系统的潜力没有得到充分的发掘和应用。基于ARM9的机器人视觉系统的目标是在选定好的S3C2410平台上移植并配置Linux操作系统,针对平台和应用的特点,制作合适的文件系统,为机器人视觉系统构建稳定的软硬件开发环境。其次编写应用程序,通过S3C2410平台,从USB摄像头实时采集图像,并利用这款嵌入式处理器的强大运算能力,对图像进行后期的处理,完成目标识别与定位,作为机器人动作单元的输入。最后针对机器人关节所使用的电机,编写特定的设备驱动程序,保证操作系统可准确地控制机器人动作,响应视觉处理的结果,开发一套完整的"机器人视觉系统"。 (1) 视觉系统 采用USB摄像头作为视觉采集器件。其优点是接口通用,驱动丰富,传输速率快。同时,Linux操作系统对于USB设备的支持较好,方便了应用程序的编写和调试。网眼(WebEye)v2000摄像头,采用了ov511芯片(Linux源代码中有相应的驱动程序),适合用于开发。 这里采用高端的32位嵌入式微处理器:基于ARM体系结构的S3C2410芯片(由三星公司生产),其主频为200MHz。它提供了丰富的内部设备:分开的16kB指令Cache 和16kB数据CacheMMU虚拟存储器管理、LCD控制器、支持NAND Flash系统引导、系统管理器、3通道UART、4通道DMA、4通道PWM定时器、I/O端口、RTC、8通道10位ADC和触摸屏接口、IIC-BUS接口、USB主机、USB设备、SD主卡和MMC 卡接口、2通道的SPI以及内部PLL时钟倍频器。S3C2410采用了ARM920T内核,0.18μm工艺的CMOS标准宏单元和存储器单元。 (2) 硬件平台组成 一块核心母板,配备CPU、16MB的NOR Flash、64MB的NAND Flash、32MB 的SDRAM,并设置系统从NAND Flash启动;一块外设电路板,负责系统和外设器件
基于ARM的嵌入式系统在机器人控制系统中的应用.
基于ARM的嵌入式系统在机器人控制系统中的应用 摘要:依据现代机器人技术的发展特点,提出了一种基于ARM (AdvancedRISCMicroprocessor)、DSP和arm-linux的嵌入式机器人控制系统的设计方法,介绍了嵌入式系统,给出了功能设计、结构设计、硬件设计、软件设计的控制系统的设计过程,并分别从上述各方面对控制系统的通用性进行了探讨。层次化的体系结构、模块化的硬件、结构化的软件使得设计出的机器人控制系统经过简单的硬件调整和软件定制,就能适用于多种机器人。通过七自由度串 摘要: 依据现代机器人技术的发展特点,提出了一种基于ARM (Advanced RISC Microprocessor)、DSP和arm-linux的嵌入式机器人控制系统的设计方法,介绍了嵌入式系统,给出了功能设计、结构设计、硬件设计、软件设计的控制系统的设计过程,并分别从上述各方面对控制系统的通用性进行了探讨。层次化的体系结构、模块化的硬件、结构化的软件使得设计出的机器人控制系统经过简单的硬件调整和软件定制,就能适用于多种机器人。通过七自由度串联机器人抓取工件的实例验证,该机器人控制系统性能稳定、具有一定的通用性。 关键词: 嵌入式系统,控制系统,ARM,机器人 1 前言 随着科学技术的发展,机器人将在太空探测、救灾防爆、海洋开发等领域有着广阔的应用前景,因而其发展正在成为国内外研究人员关注的焦点[1,2,3]。分析上述各种用途的机器人,其构成不外乎机构本题和控制系统两大部分。机构本体在体现机器人特色的同时,也决定了其必然是无人系统,在恶劣的环境下,机器人要具备一定的自主能力。这就要求机器人有一定的“判断能力”和“想法”,需要复杂的算法,包括运动算法和模式识别算法。一般的微处理器是无法完成这项任务,而上述各种机器人又无法使用计算机控制作业,32位微处理器和嵌入式操作系统的出现解决了此问题。 嵌入式系统是指以应用为核心、以计算机技术为基础、软硬件可裁剪,以及适应应用系统对功能、可靠性、成本、体积和功耗严格要求的专用计算机系统[4,5,6,7]。作为嵌入式系统的核心,嵌入式微处理器为8位、16位或32微处理器。但由于8位和16位微处理器的运行速度、寻址能力和功耗等问题,已较难满足相对复杂的嵌入式应用场合。在32位嵌入式应用领域内,ARM (Advanced RISC Machine)获得了巨大的成功[8,9,10,11]。ARM微处理器一般具有体积小、低功耗、低成本、高性能的特点;例如,由于它有大量的使用寄存器,指令执行速度更快,于是大多数数据操作都在寄存器中完成;它的寻址方式灵活简单,执行效率高,指令长度固定等。在ARM中,可以嵌入嵌入式操作系统,在此系统上可完成复杂的算法,可以代替PC机完成各种任务。
ARM+FPGA开发板规格书
2014
Revision History
阅前须知 版权声明 本手册版权归属广州创龙电子科技有限公司所有,非经书面同意,任何单位及个人不得擅自摘录本手册部分或全部,违者我们将追究其法律责任。本文档一切解释权归广州创龙电子科技有限公司所有。 ?2014-2018Guangzhou TronlongElectronicTechnologyCo.,Ltd. All rights reserved. 公司简介 广州创龙电子科技有限公司(简称“广州创龙” ,英文简称"Tronlong"),是杰出的 嵌入式方案商,专业提供嵌入式开发平台工具及嵌入式软硬件定制设计及技术支持等服务,专注于DSP+ARM+FPGA 三核系统方案开发,和国内诸多著名企业、研究所和高校有密切的技术合作,如富士康、威胜集团、中国科学院、清华大学等国内龙头企业和院校。 TI 嵌入式处理业务拓展经理ZhengXiaolong 指出:“Tronlong 是国内研究OMAP-L138 最深入的企业之一,Tronlong 推出OMAP-L138+Spartan-6三核数据采集处理显示解决方案,我们深感振奋,它将加速客户新产品的上市进程,带来更高的投资回报率,使得新老客户大大受益。” 经过近几年的发展,创龙产品已占据相关市场主导地位,特别是在电力、通信、工控、 音视频处理等数据采集处理行业广泛应用。创龙致力于让客户的产品快速上市、缩短开发周期、降低研发成本。选择创龙,您将得到强大的技术支持和完美的服务体验。 产品保修 广州创龙所有产品保修期为一年,保修期内由于产品质量原因引起的,经鉴定系非 人为因素造成的产品损坏问题,由广州创龙免费维修或者更换。 更多帮助
ARM9 S3C2440天嵌TQ2440嵌入式开发板
2012.2
目录 TQ 2440核心板规格参数 TQ 2440核心板接口说明 TQ 2440底板规格参数 TQ 2440底板软件资源
TQ 2440核心板规格参数 超小核心板设计,更省地方,更强功能;插针式设计,具有良好的物理连接性能和超强的抗震性能;采用六层军工布线设计,名厂PCB,沉金工艺,具备良好的电气连接性能,比市面上的四层布线的开发板运行程序时更具稳定性。 上市时间长,经过了广大客户的项目应用,目前Core V1.0核心板已 经安全的平稳的工作了2年时间,Core V2.0核心板也安全稳定的工作了1 年半时间;(其中V1.0核心板在军品中小批量试用成功);通过工业级用户高低温实测、强电磁干扰实测(同时测试多款开发板,TQ2440开发板唯一通过)、强粉尘环境实测通过。
2440v2核心板特性 特性说明 CPU处理器Samsung S3C2440AL,主频400MHz(最高可达533MHz) SDRAM内存板载64MB SDRAM(标准配置)可根据用户需要扩展到128MB,提供完整的解决方案 32bit数据总线SDRAM,100MHZ(支持稳定运行 133MHz,仅此一家) Nand Flash 板载256MB Nand Flash(标准配置),掉电非易失,有容乃大(可根据用户需要64MB~1GB,提供完整的解决方案) Nor Flash板载2MB Nor Flash(最高可升级到8MB)CorePower专业1.25V核心电压供电,完美解决CPU发热现象Power核心板采用3.3V供电 Powerled1个核心板电源指示灯 核心板接口接口型号为DC-2.0双列直插 尺寸微型核心板:37mm x 74mm
嵌入式系统及其在机器人中的应用
嵌入式系统及其在机器人控制中的应用 2012-6-11 (XXXX,XXXX,XXXX) 摘要:介绍了嵌入式系统的相关概念及其特点,综述了嵌入式系统在机器人运动控制系统、远程控制、视频监控系统等方面的相关应用。在了解了嵌入式系统在机器人控制中的应用现状的基础上,提出了基于嵌入式系统的机器人技术的发展趋势。 关键词:嵌入式机器人远程控制视频监控 Embedded System and its Application in the System of Robot Control WuMengmeng (School of Mechanical Engineering, Nantong University, 11100003) Abstract:The related concepts and characteristics of the embedded system were introduced in this paper. The motion control system, remote control and video monitoring systems which used embedded system was also reviewed.By understanding the present situation of the application of embedded system used in robot control, the development tendency of robot technology based on embedded system was put forward. Keywords: embedded system, robot, remote control, video monitoring systems 引言 以嵌入式计算机为核心的嵌入式系统(Embedded System)是继IT网络技术之后,又一个新的技术发展方向,它以其强大而灵活的可应用性得到了计算机、通信和信息等产业的广泛认可,已被广泛应用在工业控制、交通管理、信息家电、家庭智能管理系统、网络及电子商务、环境监测和机器人控制等领域[1]。嵌入式系统的出现与发展将真正实现计算机的“无处不在”。 机器人技术的发展从来就是与嵌入式系统的发展紧密联系在一起的,机器人技术的研究就是嵌入式技术的应用,而嵌入式技术的发展必定促进机器人智能化水平。70年代中期以后,由于智能控制理论的发展和微处理器的出现,机器人逐渐成为研究的热点,并且获得了长足的发展。目前,嵌入式系统在机器人控制系统被广泛采用。 1 嵌入式系统 1.1 嵌入式系统的定义及其特点 嵌入式系统从应用角度出发,它是20世纪70年代以后计算机发展的一个分支,以应用为中心,以计算机技术为基础,软、硬件可裁剪,适用于应用系统对功能、可靠性、成本、体积、功耗等方面有严格要求的专用计算机系统。简单的说,嵌入式系统是嵌入到目标体系中的专用计算机系统[1]。 嵌入式系统一般由嵌入式微处理器、外围硬件设备、嵌入式软件操作系统以及用户的应
初学者硬件开发步骤
嵌入式系统硬件开发自学方法简介 1.概述 最近因为工作的缘故,接触到了100多人的2012年的大学毕业生,他们今后的工作方向都是嵌入式系统的开发,具体来讲,也就是即将从事基于Android的智能手机、平板电脑等设备的开发,从我与他们的交流的情况来看,他们的困惑很多,具体表现以下几个方面: 1.1.想从事硬件开发的人,不知道一个硬件产品是如何做出来的,只有少数的人能够绘制简单的原理图和PCB,很多人对此几乎是一无所知。 1.2.一些想从事软件开发的人,分不清什么是驱动软件开发、上层应用软件开发,很多人只有点基本的C、C++语言的概念,在学校里自己写过几百行代码以上的人,也是寥寥无几,几乎搞不清楚自己以后到底想干什么和自己到底适合做什么工作。 1.3.因为开发一个产品是个复杂的事情,很多毕业生几乎是无法自己决定如何入手来开始他们的学习过程,基本上处于迷茫中。当然也有一些在学校参与过一些竞赛的同学,有一点基础的知识,绝大多数的人都需要重新开始思考他们该如何融入今后的工作。 1.4.基础知识薄弱,很多想搞硬件设计的人搞不清楚一些基本的模拟电路、数字电路的工作原理,想搞软件开发的人,对于软件编程的理念也了解不深,几乎都需要重新培训。 2.硬件开发学习的几个过程介绍 2.1.设计一个最小的基于单片机的嵌入式系统 任何硬件系统的设计,都要绘制原理图、印刷电路板,因此学会使用一种绘制原理图和印制板软件的使用,是未来从事硬件设计的基础,建议可以先购买一套简单的基于单片机的开发板,然后自己再将其复制出来,来锻炼自己的设计能力,这样子做有如下几个优点: 2.1.1.可以锻炼自己绘制原理图和印刷电路板的能力。 2.1.2.不用自己编写软件来测试自己的设计,可以利用开发的测试程序来验证自己的设计是否正确。 2.1. 3.可以锻炼自己采购器件的能力。 2.1.4.可以锻炼自己使用基本的工具的使用能力,例如:电烙铁、万用表等等。 2.1.5.花费比较低,一个人独立承担的话,也就是500元左右的花费,如果几个人合作开发的话,每个人花费100元左右就可以了,与学到的技能相比,这点花费根本算不了什么。 2.1.6.可以锻炼自己的综合素质,至少也可以了解一下如何将示范软件在自己设计的系统上运行起来,也可以了解一下嵌入式系统软件是如何开发出来的,为以后与软件设计人员在一
嵌入式与机器人不得不说的故事
嵌入式系统在机器人控制中的应用 1嵌人式系统的简介 嵌入系统是指以应用为中心,以计算机技术为基础,软件硬件可剪裁,适应于应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。它主要由嵌入微处理器、外围硬件设备、嵌人式操作系统以及用户应用软件等部分组成。用于实现对其它设备的控制、监视和管理等功能,它通常嵌人在主要设备中运行。 一个最小的嵌人式系统的基本组成为: ①一个用作引导的可用设施(工具); ②一个具备内存管理,进程管理和定时器服务的LINUX微内核; ③一个初始进程; ④硬件的驱动程序; ⑤一个或几个应用进程以提供必要的应用功效。 嵌入式系统与普通的PC系统相比主要具有以下特点: (1) 嵌入式系统功耗低,体积小,专用性强。嵌入式CPU工作在为特定用户群设计的系统中,能够把PC中许多板卡完成的任务集成到芯片内部,有利于嵌入式系统设计的小型化。 (2) 嵌入式系统中的软件一般固化在存储芯片或单片机本身中,以提高实行速度与系统可靠性。硬软件都必须高效设计,系统要精简,对软件代码质量要求很高。操作系统一般和软件集成在一起。 (3) 嵌入式系统开发需要专门的开发工具和开发环境。 2 嵌入式系统在机器人中的应用 不论是在工业控制中,还是在商业领域里,机器人技术都得到了广泛的应用。从用于生产加工的传统工业机器人到丰富大众生活的现代娱乐机器人,都与嵌入式系统密不可分。现有的大多数机器人,都采用单片机作为控制单元,以8位和16位最为常见,其处理速度较低,没有操作系统,无法实现丰富的多任务功能,系统的潜力没有得到充分的发掘和应用。 随着嵌入式控制器越来越微型化、功能化。机器人技术获得更大的发展机遇,无论从控制系统的结构还是机器人的智能程度方面都得到了很大的提高。以索尼的机器狗为代表的智能机器宠物是最典型的嵌入式机器人控制系统,除了能够实现复杂的运动功能,它还具有图像识别、语音处理等高级人机交互功能,它可以模仿动物的表情和运动行为。火星车也是一
arm9开发板实验报告1
轻工业学院 实训报告 实训名称: 项目一:编写从A/D转换器的通道x获取模拟数据,并将转换后 的数字量以波形的形式在LCD上显示的程序 项目二:触摸屏驱动程序设计 姓名:克歌 院(系):计算机与通信工程学院 专业班级:嵌入式09--01 学号: 1 指导教师:雪琴 成绩: 时间:2011年 8月 29日至 2011年 9 月 7 日
一、需求说明 1.巩固和强化学生的嵌入式系统的基本概念和开发流程,掌握基本知识和基本 技能。 2.掌握硬件开发平台、开发资源和软件开发环境,尤其是裸机嵌入式系统开发 方法。掌握汇编和C语言混合编程技巧,熟悉系统启动引导过程,能够成功移植嵌入式系统引导程序。培养和训练学生综合利用所学基本知识和基本技能进行小型裸机程序开发的技能。 3.明确思路和任务,查询相关书籍、资料,综合了解ARM的AD转换器和LCD 驱 动器,重点分析时S3C2440的LCD 驱动器的工作原理和初始化方法。分析与AD转换相关的寄存器,编写AD转换器的初始化函数,编写获取AD转换结果的函数。分析与LCD相关的寄存器,编写LCD 驱动器的初始化函数,配置显示方式。分析LCD绘图的API函数。编写主函数,将AD转换结果在LCD上以波形的方式显示,同时以串口输出到PC机。进入调试。实现转换数据实时输出,实现串口输出数据与LCD 波形显示的一致。 4.明确思路和任务,查询相关书籍、资料,重点分析S3C2440的触摸屏接口工 作原理和相关寄存器。编写触摸屏初始化函数,确定XY位置转换模式。编写触摸屏中断初始化函数,中断服务函数。编写屏幕校准函数。确定坐标计算公式。编写触点数据采集函数。编写主函数,进入调试。实现触摸屏坐标点x、y的正确读取。 二、功能描述 项目一:编写从A/D转换器的通道x获取模拟数据,并将转换后的数字量以波形的形式在LCD上显示的程序。 项目二:通过对AD转换器的配置——触摸屏自动测试x/y位置模式,选择进入到触摸屏驱动函数。在进行触摸屏测试时,先进入函数判 断是否启动A/D转换,如果不是的话就跳出此函数,如果是的话 进行下面的判断,看A/D转换是否结束,如果是,跳出函数,如 果不是运行程序,并输出x、y的值。再回到触摸屏驱动函数, 测试结束,清屏。
嵌入式系统在智能机器人中的应用
嵌入式系统在智能机器人中的应用 吉祥利 (中南大学信息科学与工程学院电子信息工程湖南长沙 410075) 摘要(abstract):简要介绍嵌入式系统的概念,技术特点.重点阐述嵌入式系统在机器人控制中的应用.以嵌入式智能足球机器人为例,利用模块化和可扩展的思想设计和分析了硬件系统和软件系统.嵌入式智能机器人平台具有硬件体积小、模块化、易扩展、功耗低,软件实时性强、可定制、可靠性高等优点,其具有广泛的应用前景. 关键词(key words):嵌入式系统,智能机器人,Windows CE.NET,人机交互. 1引言(Introduction) 随着科学技术的进步,机器人得到了快速的发展,促进了机器人被广泛的应用到各行各业中.但目前机器人的智能水平并不高,仍处于初级阶段,智能机器人研究面临俩个核心问题:一是提高机器的自主性,即希望机器进一步独立于人,具有更为友善的人一机界面;二是提高机器的适应性,即就机器与环境的关系而言,希望加强它们之间的交互关系[1]. 为促进当前智能机器人研究和应用,迫切需要开发“具有开放式结构的、模块化、标准化的嵌入式智能机器人平台”.这种智能机器人平台具有硬件体积小、模块化、易扩展、功耗低,软件实时性强、可定制、可靠性高等优点,可以广泛地应用于自主式移动机器人上,将有着广泛的应用前景[2]. 2 嵌入式系统简介(Embedded Intelligent Robot introduction) 一般来说,嵌入式系统是执行专用功能并被内部计算机控制的设备或者系 统0,即嵌入到对象体系中的专用计算机系统0,嵌入性0,专用性0与计算机系统0是嵌入式系统的三个基本要素.它主要完成信号控制的功能,体积小,结构紧凑,可作为一个部件埋藏于所控制的装置中,它提供用户接口、管理有关信息的输入输出、监控设备工作,使设备及应用系统有较高智能和性价比.嵌入式系统由嵌入式硬件与嵌入式软件组成,硬件以芯片、模板、组件、控制器形式埋藏于设备内部,软件是实时多任务操作系统和各种专用软件,一般固化在ROM或闪存中。嵌入
libxml2移植到arm9开发板
Libxml2配置步骤(在root权限下使用 su) 1: cd libxml2-2.7.1 2:export PATH=/root/arm-2007q1/bin:$PATH (注释:此处变量为交叉编译工具解压的路径) export ARCH=arm export CROSS_COMPILE=arm-linux 3: ./configure --host=arm-linux --target=arm-linux CC=arm-none-linux-gnueabi-gcc AR=arm-none-linux-gnueabi-ar LD=arm-none-linux-gnueabi-ld ANLIB=arm-none-linux-gnueabi-ranlib --prefix=/media/sf_libxml/0508 注释:交叉编译工具使用的是arm-none-linux-gnueabi --prefix 指定配置路径 4: make install 安装成功后,文件夹0508下会有四个子文件夹:bin/include/lib/share 编译自己编写的文件 cd /xx/xx/xx 进入存放源文件的文件夹 由于前面已经将交叉编译工具的路径临时赋予了PATH变量,所以可以直接用工具名,而不再需要添加路径 arm-none-linux-gnueabi-gcc gbread.c -o gbread -I /media/sf_libxml/0508/include/libxml2 -L /media/sf_libxml/0508/lib -lxml2 添加路径的编译命令 /root/arm-2007q1/bin/arm-none-linux-gnueabi-gcc gbread.c -o gbread -I /media/sf_libxml/0508/include/libxml2 -L /media/sf_libxml/0508/lib -lxml2 2条命令都可以使用 编译完成后,会生成相应的二进制文件,和相应的动态库及静态库
ARM嵌入式系统开发综述.
视听研究所 主页:论坛: 所有资料均收集于各网站。 若您认为有关资料不适合公开,请联系newvideo@https://www.360docs.net/doc/1617764834.html, 我们会第一时间删除。 感谢各位网友的无私奉献和支持! 加密时间:2008-2-1 获取更多权威电子书请登录 ARM 嵌入式系统开发综述 ARM 开发工程师入门宝典 获取更多权威电子书请登录 前言 嵌入式系统通常是以具体应用为中心,以处理器为核心且面向实际应用的软硬件系统,其硬件是整个嵌入式系统运行的基础和平台,提供了软件运行所需的物理平台和通信接口;而嵌入式系统的软件一般包括操作系统和应用软件,它们是整个
系统的控制核心,提供人机交互的信息等。所以,嵌入式系统的开发通常包括硬件和软件两部分的开发,硬件部分主要包括选择合适的MCU 或者SOC 器件、存储器类型、通讯接口及I/O、电源及其他的辅助设备等;软件部分主要涉及OS porting和应用程序的开发等,与此同时,软件中断调试和实时调试、代码的优化、可移植性/可重用以及软件固化等也是嵌入式软件开发的关键。 嵌入式系统开发的每一个环节都可以独立地展开进行详细的阐述,而本文的出发点主要是为嵌入式开发的初学者者提供一个流程参考。因为对于初学者在面对一个嵌入式开发项目的时候,往往面临着诸多困难,如选择什么样的开发平台?什么样的器件类型?在进行编译时怎样实现代码优化?开发工具该如何选择和使用?在进行程序调试时应该注意那些问题以及选择什么样的嵌入式OS 等等。希望通过本文,能帮助初学者了解有关ARM 嵌入式系统开发流程。 获取更多权威电子书请登录 目录 前言 (2) 1 嵌入式开发平台 (4) 1.1 ARM的开发平台: (4) 1.2 器件选型 (7) 2 工具选择 (11) 3 编译和连接 (13) 3.1 RVCT的优化级别与优化方向 (16) 3.2 Multifile compilation (21) 3.3调试 (22)
STM32 开发板的介绍
STM32 开发板的介绍 STM32的开发板硬件资源如下: 1、STM32F103RBT6 TQFP64 FLASH:128K SRAM:20K; 2、MAX232通讯口可用于程序代码下载和调试实验; 3、SD卡接口; 4、RTC后备电池座; 5、两个功能开关; 6、复位连接; 7、两个状态灯; 8、所有I/O输出全部引用; 9、USB接口、可用于USB与MCU通讯实验; 10、标准的TJAG/SWDT仿真下载; 11、BOOT0 BOOT1Q启动模式; 12、电源开关; 13、电源指示灯
STM32开发板硬件详解 1、MCU部分原理图 该开发板采用3.3V工作电压,几个耦合电容使系统更加稳定。系统工作频率8M晶振、时钟频率32.768。 这里STM32的VBAT采用CR1220纽扣电池和VCC3.3混合供电方式,在有外部电源(VCC3.3)的时候,CR1220不给VBAT供电,而在外部电源断开的时候,则由CR1220给VBAT供电。这样,VBAT 总是有电的,以保证RTC的走时以及后备寄存器的内容不丢失。2、启动模式电路图 上图中的BOOT1用于设置STM32的启动方式,其对应启动模式如下表所示
PCB板标志图解如下: 3、TJAG电路 4、LED状态灯原理图 两个LED状态灯,其中LED0接在PA8、LED1接在PD2。 5、SD卡原理图
SD卡我们使用的是SPI1模式通讯,SD卡地SPI接口连接到STM32的SPI1上,SD-CS接在PA3上,MOSI接MCU PA7(MOSI)、SCK 接在MCU PA5(SCK)、MIS0接在MCU PA6(MIS0). 6、按键原理图 KEY1和KEY2用作普通按键输入,分别接在PA13和PA15上,
嵌入式_ARM9micro2440底板制作论文
ARM9嵌入式系统设计课程论文 论文题目: 嵌入式ARM9 micro2440底板制作论文
一、摘要 为适应嵌入式技术在现代工业及电子等更多领域的广泛应用,通过对ARM9嵌入式微处理器芯片 S3C2410的研究,设计出基于S3C2410核心板的嵌入式系统开发底板,更多的需求及功能可在其底板上 进行扩展与实现。首先对ARM9嵌入式微处理器S3C2440进行介绍,然后给出了基于S3C2440核心板的嵌入式系统开发底板的设计与功能扩展,包括开发板总体设计,电源模块设计,各种通信模块设计如串口、JTAG接口、网络接口、CAN总线通信接口等。该模板的设计实现了嵌入式系统在更多更广泛领域应用的灵活性。 关键词 ARM9 S3C2440 嵌入式微处理器嵌入式系统 Abstract Toadaptingfortheembeddedtechnology’sapplicationwidelyinthe modernindustry,electronandsoon,itisthedesignfortheembeddeds ystemexploitationmotherboardbasedonS3C2410coreboardthrought heresearchonARM9embeddedmicroprocessorS3C2440.Moredemandand functioncanextendandcometrueonthemotherboard.Firstly,introd uceARM9embeddedmicroprocessorS3C2440.Thenintroducethedesign
工业机器人嵌入式实时控制系统
工业机器人嵌入式实时操纵系统 1操纵系统结构 工业机器人操纵系统是一个多任务并行并具有很高实时性的系统。当前主流操纵系统大致分为两种结构[10]。一是多处理器主从式的操纵系统。主机一般为IPC,使用INTEL的CPU,运行的是非实时操作系统,例如windows。在主CPU中主要运算一些非实时任务。从机可能是运动操纵卡或运动操纵器,负责执行伺服操纵等实时性高的任务,其CPU一般为嵌入式的DSP,负责复杂的信号处理和伺服操纵等运算,再加上FPGA芯片负责系统I/O信号处理。第二种系统结构是单处理器配合实时操作系统。在这种操纵器中,所有的任务都要在一个CPU上实行,这就对各个任务如何合理使用CPU时间提出了极大的要求。一开始的机器人多采纳单个处理器,但因为当时处理器性能不高,且不能运行实时操作系统,难以满足对机器人实时性以及复杂的伺服操纵的要求。所以随着时间的推移,多处理器结构占据了主流。近年来,嵌入式实时操作系统的进展给单机处理器完成机器人操纵任务提供了可能。通过实时操作系统对所有任务实行CPU时间分配,达到多任务并行处理的效果和极短的中断响应时间,能够达到机器人操纵需求。 操纵系统对输入数字信号的处理和伺服电机的操纵等都在μC/OS-III 中编写用户应用代码来完成。要使用μC/OS-III,首先要完成 μC/OS-III在STM32F4上的移植。这其中涉及对源代码中与CPU相关的代码的修改,包括μC/OS-III中CPU相关代码和μC/CPU中相关代码。移植好后,通过系统配置模块来给μC/OS-III相对应模块和用户代码文件实行参数设置,便可在μC/OS-III系统下,利用μC/OS-III 提供的丰富的API函数来编写用户任务代码。BSP文件包含操纵板上所有外设的初始化,这样用户才能使用这些外设来输出输入相对应的信号。对用户代码,即软件结构的分析将在下一节实行。这样,系统软硬件架构都是具有模块化和开放性特征,便于修改和升级。 2操纵系统软件结构
基于嵌入式ARM9的USB设计与实现
基于嵌入式ARM9的USB设计与实现 引言 USB(Universal Serial Bus)是通用串行总线的缩写,因其具有方便易用,动态分配带宽,容错性优越和高性价比等特点,现已成为计算机的主流接口。 随着嵌入式系统的广泛应用,各种小型终端需要开发出与外界联系的USB 接口。目前,常用的技术有两种。基于单片机的USB接口,特点是需要外置芯片,电路复杂,留下的CPU资源不多;基于ARM的USB接口,特点是资源丰富,但ARM系列产品较多,如果选型不当,还需要搭接较多的外围电路,且不能很好地发挥CPU性能。 1 USB 接口原理 USB1.1 规范[1]将USB 分为5 部分:控制器、控制器驱动程序、USB 芯片驱动程序、USB设备以及针对不同USB 设备的客户端驱动程序。 (1) 控制器(Host Controller)主要负责执行由控制器驱动程序发出的命 令。 (2) 控制器驱动程序(Host Controller Driver), 在控制器与USB 设备间 建立通信 管道(Pipe)。 (3) USB 驱动程序(USB Driver),提供对不同USB 设备及芯片的支持。 (4) USB 设备(USB Device), 有两类USB 设备:一类称为功能设备(Function),另 一类是称为USB 集线器(HUB),可以连接多个USB 设备。 (5) USB 设备驱动程序(Client Driver Software)及特定应用程序。主控 制器的驱动软件由操作系统支持,USB 设备开发人员一般只需编写客户 驱动程序,实现特定功能,设备端所有功能软件需要全面设计。USB 的 四种数据传输模式分别是:控制型传输、中断型传输、批量型传输、实 时型传输。第一种在缺省通道中传输USB 接口本身的配置等控制信息, 后面三种用于功能部件传输数据。中断型用于键盘等的异步输入输出少 量数据传输,批量传输主要用于象硬盘等块设备的数据传输,在中断和 批量的传输过程中要传递交互握手信号,确保数据准确无误。实时传输 对带宽有严格要求,但允许有一定误码,省去了交互握手信号的传递, 常用于音视频码流数据传输。四种类型数据都按带宽要求分配在1ms 一 帧的数据帧内进行传输,连到端点(EndPoint)通道. 1.1嵌入式系统USB 接口设计 要满足高性能ARM嵌入式系统的要求,扩展USB接口必须选择高性能USB控制器芯片,Philips公司的PDISUBD12 USB器件,是与微处理器配合使用的高性能USB接口器件,性价比很高[2][4]。PDIUSBD12主要特性有: (1) 符合USB 1.1 技术规范; (2) USB控制器并行接口与处理器间的数据传输速度高达2M 字节/秒; (3) 在批量模式和同步模式下均可实现1M 字节/秒的数据传输速率; (4) 集成了FIFO存储收发器,支持DMA 操作;
基于嵌入式系统的机器人定位技术的研究
基于嵌入式系统的机器人定位技术的研究 发表时间:2017-12-31T10:19:55.160Z 来源:《电力设备》2017年第25期作者:桑运晓刘同壮贾超伟潘俊朋[导读] 摘要:机器人的准确定位是其完成导航、控制任务的关键。(山东科技大学机械电子工程学院山东青岛 266590)摘要:机器人的准确定位是其完成导航、控制任务的关键。本文针对一套自主研发嵌入式系统机器人,研究了机器人的定位技术,文章主要从硬件系统和软件系统两个方面进行阐述。关键词:嵌入式系统;机器人;定位技术随着机器人性能不断地提高,移动机器人的应用范围大为扩展,不仅在工业、农业、医疗、服务等行业中得到广泛的应用,而且在城市安全、国防和空间探测领域等场合也有很好的应用前景。因此,移动机器人技术已经得到全世界的普遍关注。 一、硬件系统本课题所设计的的嵌入式系统的机器人定位系统按照功能可以划分为五大部分:机械结构子系统、传感器子系统、机器人供电子系统、定位子系统和上位机。其硬件体系结构框图如图。图3.1硬件体系结构框图机械结构子系统:本课题研究所用的移动机器人实验平台为学校自主开发,机械结构部分主要包括车身、电机、车轮及车轴连接件等。采用三轮结构,前轮为万向轮,两个后轮为差动驱动轮,由两个直流电机驱动。机械结构子系统是轮式机器人定位系统的载体,但在实验过程中定位子系统也可以脱离机械结构子系统单独进行调试。传感器子系统:使用TI的16位模数混合处理芯片MSP430F149为核心,控制相关传感器,为定位提供当前周围环境测距、加速度、角速度和罗盘方位等信息。设计了RS-485及RS-232接口,并使用工业级Modbus协议与上位机平台进行通讯。 GPS定位子系统:以HOLUX公司的GR-87型GPS定位模块为卫星接收模块,微控制器为TI公司的MSP430系列中的F149型单片机,对符合NMEA-0183协议的地理位置信息进行解析,然后在MzLH04-12864点阵LCD模块上显示当前位置与运动信息,以方便调试。同时通过RS-232串口按照Modbus协议的RTU模式与上位机进行通讯。机器人供电子系统:由两块铅酸蓄电池和机器人专用电源模块组成,给各个子系统供电。除了提供+5、+9、±15和+24输出外,还具有电压电流监测,过流保护,电池的过充过放保护等功能。上位机电子地图定位软件系统:通过RS232串口以Modbus协议的RTU模式分别与GPS定位子系统和传感器子系统进行通讯。 二、软件系统本课题的软件系统按照结构体系分为三大部分:GPS定位子系统、传感器子系统和上位机电子地图定位软件系统。按照控制结构分为三个层次:传感器层、信息处理层和上位机显示综合层,如图3.2所示。第一功能层:传感器层。该层主要由三轴加速度检测、电子罗盘方向检测、超声波测距检测、三轴陀螺仪角速度检测、GR87卫星定位模块组成,分属于传感器子系统和GPS定位子系统,用于采集机器人的经纬度坐标、运动状态与环境信息。各模块都有相应的信号调理电路,并通过一定的接口(RS232,SPI等)与所属的子系统控制器相连接。 图3.2软件体系层次图第二功能层:信息处理层。GPS定位子系统主要从事NMEA-0183协议的解析工作,采取串口中断触发模式,然后分析从GR87卫星定位模块收到的信息并进行解析,再经过时间调整等一系列处理,最后存储在缓存区,等待上位机的命令,如果需要就按照Modbus协议发送定位信息数据帧给上位机。同时实时显示当前的位置与运动状态信息,以及有关卫星的信息。传感器子系统主要完成对当前环境测距、加速度、角速度和罗盘方位等信息的采集和处理功能,并可以与通过Modbus协议上位机通讯。第三功能层:上位机显示综合层。电子地图定位软件采用VisualBasic6.0语言开发,以GoogleEarth中的三维立体卫星拍摄的实景图片作为地图,更加生动直观,可以方便的找到参照物。该软件定时通过Modbus协议与GPS定位子系统和传感器子系统进行通讯,得到移动机器人的实时位置状态、运动状态与环境信息,并通过地图界面显示出来。同时还具有距离测量,运动轨迹显示等功能。在用户输入基准点经纬度坐标后,还可以根据差分GPS定位原理进行差分定位,进一步提高定位精度。信息处理层定时从传感器层获取信息,并进行处理,将处理结果存储至缓存区,然后等待上位机显示综合层的命令。上位机显示综合层通过与两个子系统之间按照Modbus协议获取信息,并综合处理再显示。结论 本文基于一套自主研发的轮式机器人,研究了移动机器人的定位技术,设计了该轮式机器人基于全球定位系统的定位体系结构,实现了基本的定位与电子地图功能,切实提高了该轮式机器人的自动化水平,为后续研究提供了良好的软硬件平台。参考文献:
ARM9 S3C2410开发板简介
Page 1 of 13 S3C2410开发板数据手册 强烈推荐这款2410开发板 超值提供 ARM9 2410开发板+全新三星原装3.5三星TFT 带驱动板和触摸 1400元 LCD 单卖 550元 全新三星原装3.5三星TFT 带驱动板和触摸 GPRS 模块单卖 400元 LCD 简介: 生产商: SamSung 型 号: L TV350 成 色: 全新原装 特 性: 26万色TFT 、分辨率320*240、带触摸屏、LED 背光 接 口: RGB/CPU 总线可选, 直接接S3C2410 附 件 : 电压驱动板,2.0mm 双排插引出接口 ARM9 2410硬件平台综述 ARM9 2410平台由核心板(Core-Board)和底板(Bottom-Board)以及3.5寸LCD(带触摸)组成。 如下图所示: 板子背面示意图:
● ARM2410 的主要特点 1、Core-Board(核心板) CPU: Samsung的S3C2410x处理器,工作频率达203MHz; FLASH ROM: 64MB Nand Flash,可选配为各种容量8位的NANDFLASH; NOR FLASH(SST39VF1601)提供2MBNor Flash; SDRAM : 64M (Samsung K4S561632H-Tc75) 2片 4Banks×4Mbits ×16bits SDRAMPC100/PC133兼容; RTC 实时时钟: 外接32.768KHz的晶振,带有备份电池,可保持时钟 NAND FLASH --NOR FLASH 启动选择开关 两个I/O 口连接两个LED,方便用户调试自己的程序 2、Bottom-Board (底板) LCD 接口: 支持各种TFT LCD(50PIN2.0排针) 触摸屏接口:可接四线电阻式触摸屏; 串口:两个RS232串口;1路TTL电平接口 GPRS/GSM接口: SIMCOM公司GSM/GPRS模块 USB Device接口: 1个DEVICE接口(USB 1.1协议) SPI 接口 IIC总线接口 ADC模数转换接口: 4路10位AD 两个USB HOST: 1个USB Host A型接口(USB1.1协议), 1个USBHost B型接口(USB1.1协议); SD/MMC 接口: 支持SD卡、同时兼容MMC卡; JTAG接口:标准ARM 20针JTAG&&Wiggle&&ICE 接口; IIS :采用UDA1341TS IIS 接口(立体声输出,MIC 输入), 外部中断接口: 8路外部中断输入 网卡:提供10M Ethernet芯片CS8900A,采用集成隔离变压器的RJ45接口,并带有 Page 2 of 13
嵌入式在机器人中的应用
近年来,基于机器视觉的智能机器人在工业等各个领域中得到了广泛的应用.本文针对应用中遇到的一些问题,提出了将机器视觉与嵌入式系统相结合的思想.开发了一种通用的嵌入式系统平台,进行操作系统的移植和图像匹配等算法的研究,并将其应用于移动机器人的视觉导航,取得了较好的效果。 随着Internet技术与信息家电、工业控制技术等的结合日益紧密,嵌入式设备与Internet 的结合已成为大势所趋。此时期新的微处理器层出不穷,要求嵌入式操作系统的设计更加便于移植,支持更多的微处理器。嵌入式系统的开发需要强大的硬件开发工具和软件支持包。通用计算机上使用的新技术、新观念开始逐步移植到嵌入式系统中,如嵌入式数据库、移动代理、实时CORBA等。各类嵌入式Linux操作系统在全球数以百万计爱好者的合力开发下迅速发展,由于具有源代码开放、系统内核小、执行效率高、网络功能强,多媒体人机交互界面友好等特点,很适合信息家电等嵌入式系统的需要。 一、嵌入式系统的技术特点 早期的嵌入式系统设计方法,通常采用“硬件优先”原则,即在只粗略估计软件任务需求的情况下,首先进行硬件设计与实现。然后,在此硬件平台上再进行软件设计。因而很难达到充分利用软硬件资源,取得最佳性能的效果。同时,一旦需要对设计进行修改时,整个设计流程将重新进行,这对成本和设计周期的影响很大。这种传统的设计方法只能改善软件/硬件各自的性能,在有限的设计空间不可能对系统做出较好的性能综合优化,在很大程度上依赖于设计者的经验和反复实验。 上世纪90年代以来,随着电子系统功能的日益强大和微型化,硬件和软件也不再是截然分开的两个概念,而是紧密结合、相互影响的。因而出现了软硬件协同(codesign)设计方法,即使用统一的方法和工具对软件和硬件进行描述、综合和验证。在系统目标要求的指导下,通过综合分析系统软硬件功能及现有资源,协同设计软硬件体系结构,以最大限度地挖掘系统软硬件能力,避免由于独立设计软硬件体系结构而带来的种种弊病,得到高性能低代价的优化设计方案。 二、嵌入式系统的发展趋势 在网络、通信、微电子发展的基础上,以及势不可挡的数字化信息产品的强大需求推动下,嵌入式技术具有广阔的发展创新空间。 (1) 低功耗、高性能、高可靠性的系统需求对我国芯片设计是一个机遇。以嵌入式处理器为领头的国产CPU、片上系统(SoC)、片上网络系统(NoC)将有很大的发展。 (2) Linux正逐渐成为嵌入式操作系统的主流;J2ME技术也将对嵌入式软件的发展产生深远影响。目前自由软件技术备受青睐,并对软件技术的发展产生了巨大的推动作用。嵌入式操作系统内核不仅需要具有微型化、高实时性等基本特征,还将向高可信性、自适应性、构件组件化方向发展;支撑开发环境将更加集成化、自动化、人性化;系统软件对无线通信和能源管理的功能支持将日益重要。近几年来,为使嵌入式设备更有效地支持Web服务而开发的操作系统不断推出。这种操作系统在体系结构上采用面向构件、中间件技术,为应用软件乃至硬件的动态加载提供支持,即所谓的"即插即用",在克服以往的嵌入式操作系统的局限性方面显示出明显的优势。 (3) Java虚拟机与嵌入式Java将成为开发嵌入式系统的有力工具。嵌入式系统的多媒体化将变成现实。它在网络环境中的应用已是不可抗拒的潮流,并将占领网络接入设备的主导地位。 (4) 嵌入式系统与人工智能、模式识别技术的结合,将开发出各种更具人性化、智能化的实际系统。智能手机、数字电视,以及汽车电子的嵌入式应用,是这次机遇中的切入点。伴随网络技术、网格计算的发展,以嵌入式移动设备为中心的"无所不在的计算"将成为现实。 三、嵌入式系统在机器人技术中的应用