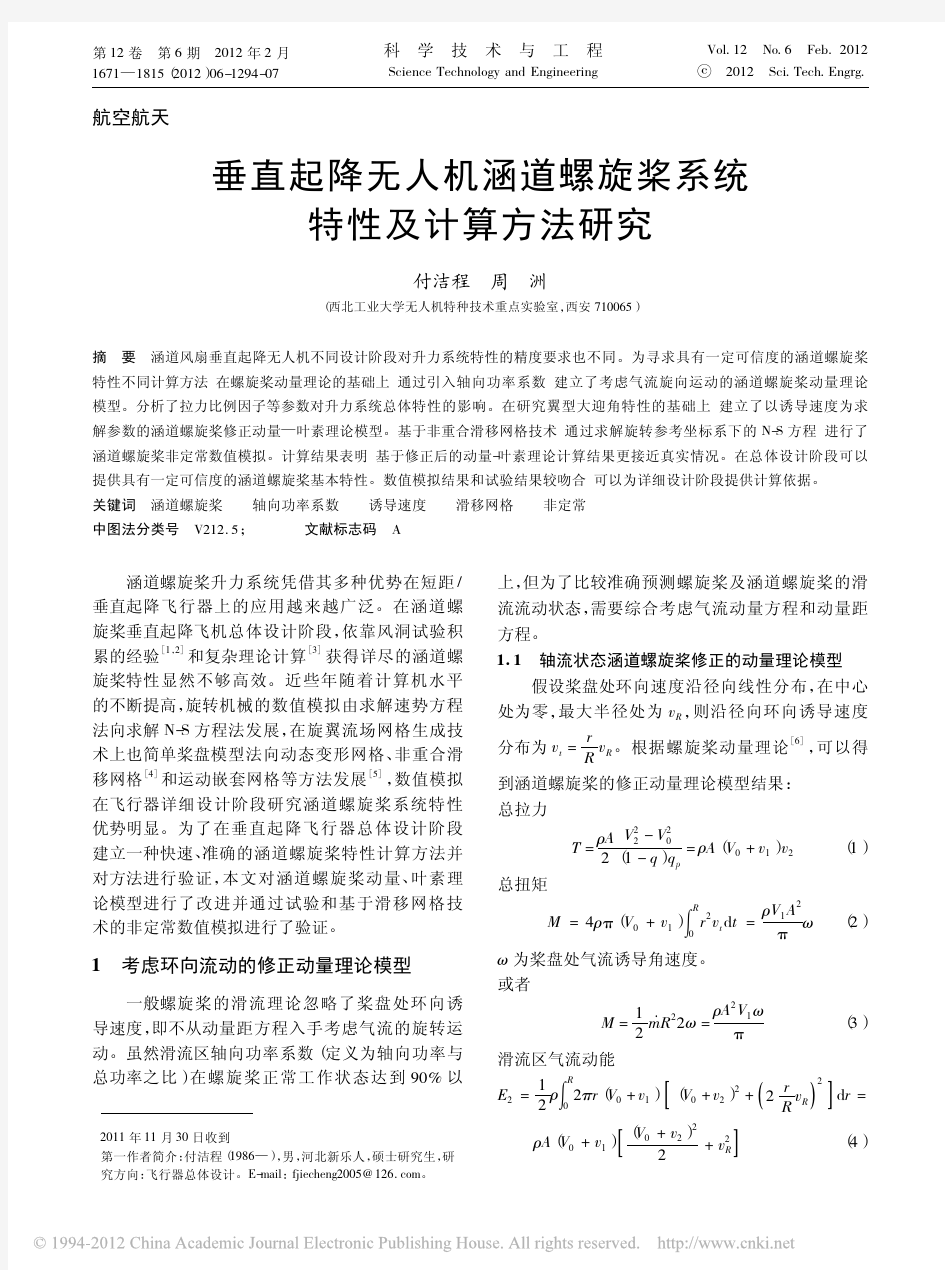
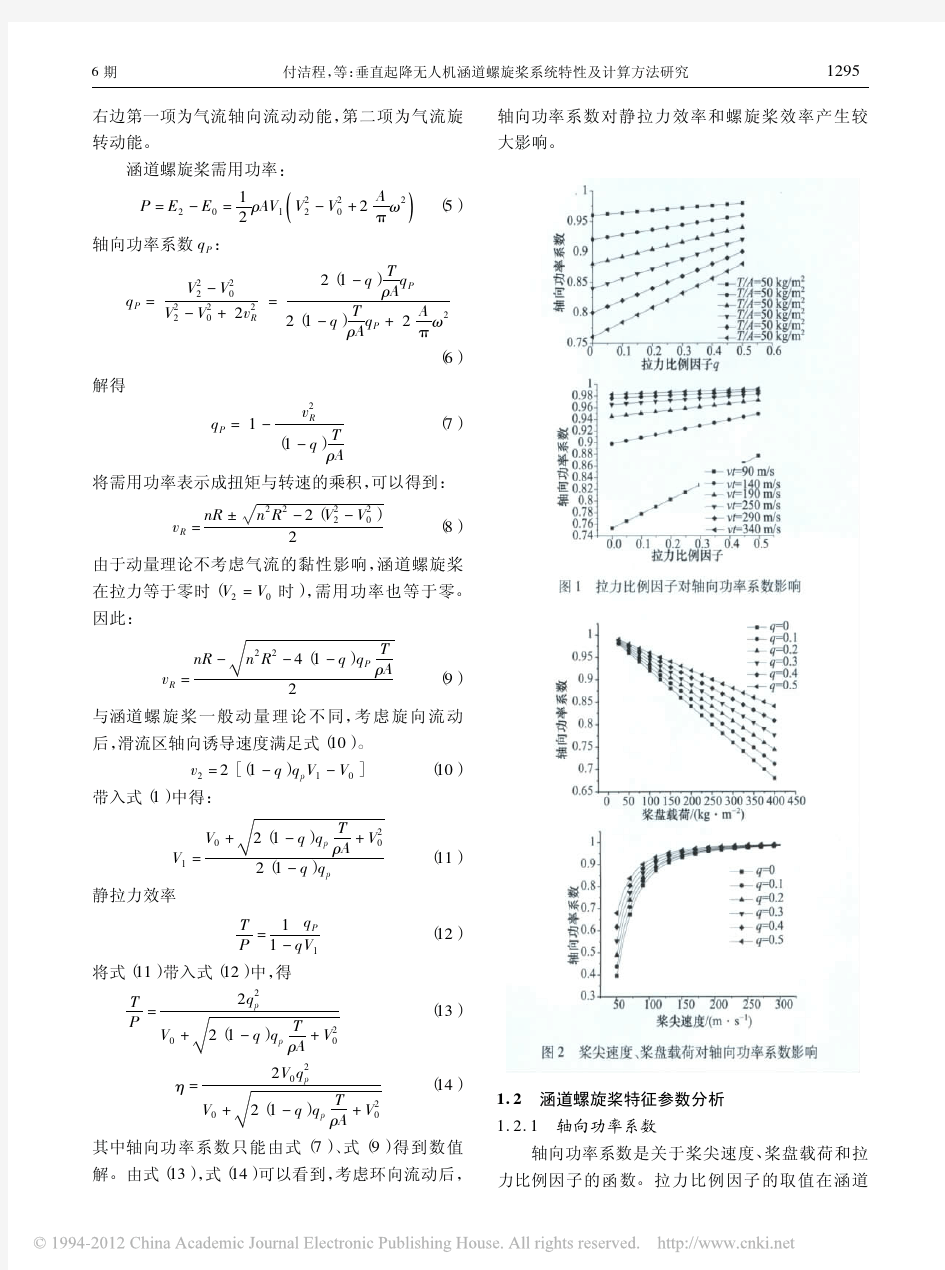
垂直起降无人机涵道螺旋桨系统特性及计算方法研究
【CN210027904U】一种无人飞机磁悬浮螺旋桨【专利】
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920426803.1 (22)申请日 2019.04.01 (73)专利权人 广东寰泰航空科技有限公司 地址 523106 广东省东莞市东城街道牛山 光明大道东城中云智慧城市产业园内 B栋3楼310号 (72)发明人 唐飞龙 (74)专利代理机构 重庆百润洪知识产权代理有 限公司 50219 代理人 刘立春 (51)Int.Cl. B64C 27/32(2006.01) B64D 27/24(2006.01) (54)实用新型名称 一种无人飞机磁悬浮螺旋桨 (57)摘要 本实用新型公开了一种无人飞机磁悬浮螺 旋桨,包括磁悬浮盒,磁悬浮盒的内部贯穿有转 子轴,磁悬浮盒的一侧活动连接有盒盖,盒盖与 磁悬浮盒的内表面且相对的一侧均固定连接有 绝磁板,两个绝磁板相对的一侧均固定连接有磁 环,所述转子轴的表面且位于两个磁环之间固定 连接有磁盘,本实用新型涉及无人机技术领域。 该无人飞机磁悬浮螺旋桨,在两个磁环之间设置 磁盘,利用磁盘与磁环之间的斥力,使磁环悬浮 在两个磁环之间,使转子轴克服了在无人机的重 力下表面与马达外壳内壁的挤压力,进而减小了 摩擦力,而磁性滤板内圈同样带有磁性,可将转 子轴稳定在轴心处,同样减小了转子轴表面与其 他物品的摩擦力, 使转子轴转动更顺畅。权利要求书1页 说明书3页 附图2页CN 210027904 U 2020.02.07 C N 210027904 U
权 利 要 求 书1/1页CN 210027904 U 1.一种无人飞机磁悬浮螺旋桨,包括磁悬浮盒(1),其特征在于:所述磁悬浮盒(1)的内部贯穿有转子轴(2),所述磁悬浮盒(1)的一侧活动连接有盒盖(3),所述盒盖(3)与磁悬浮盒(1)的内表面且相对的一侧均固定连接有绝磁板(4),两个所述绝磁板(4)相对的一侧均固定连接有磁环(5),所述转子轴(2)的表面且位于两个磁环(5)之间固定连接有磁盘(6),所述磁盘(6)的内部贯穿有滚珠(7),所述磁悬浮盒(1)的内表面固定连接有基座(8),所述基座(8)的一侧固定连接有销柱(9),所述盒盖(3)的一侧固定连接有卡套(10),且卡套(10)的内表面与销柱(9)的外表面卡接,所述销柱(9)的表面且位于基座(8)与卡套(10)之间套设有磁性滤板(11),且磁性滤板(11)的内部固定连接有滤网(12),所述盒盖(3)与磁悬浮盒(1)的内部均开设有透气孔(13),所述磁悬浮盒(1)的设置有两个,两个所述磁悬浮盒(1)之间固定连接有波纹外壳(15)。 2.根据权利要求1所述的一种无人飞机磁悬浮螺旋桨,其特征在于:所述盒盖(3)的一侧固定连接有轴承(14),且轴承(14)套设在转子轴(2)的外部。 3.根据权利要求1所述的一种无人飞机磁悬浮螺旋桨,其特征在于:两个所述磁悬浮盒(1)之间且位于波纹外壳(15)的内部固定连接有固定筒(16),且固定筒(16)的内表面固定连接有线圈(17)。 4.根据权利要求1所述的一种无人飞机磁悬浮螺旋桨,其特征在于:所述转子轴(2)的表面且位于固定筒(16)的内部固定连接有磁块(18),所述转子轴(2)的顶端固定连接有桨叶(19)。 5.根据权利要求3所述的一种无人飞机磁悬浮螺旋桨,其特征在于:所述波纹外壳(15)的一侧固定连接有塑料块(20),所述线圈(17)的两端均依次贯穿固定筒(16)和波纹外壳(15)并延伸至塑料块(20)的内部。 6.根据权利要求1所述的一种无人飞机磁悬浮螺旋桨,其特征在于:所述波纹外壳(15)、磁悬浮盒(1)与盒盖(3)的外部均套设有保护壳(21),所述保护壳(21)的一侧固定连接有支架(22)。 2
四旋翼无人机原理以及组装过程
四旋翼无人机原理以及组装过程 1.硬件组成: 机架, 4个螺旋桨, 4个电机, 4个电调, 1信号接收器, 1个飞控板, 1个稳压模块, 一个电池 ?螺旋桨:四个螺旋桨都要提供升力,同时要抵消螺旋桨的自旋,所以需要正反桨,即对角的桨旋转反向相同,正反相同。相邻的桨旋转方向相 反,正反也相反。有字的一面是向上的(桨叶圆润的一面要和电机旋转 方向一致) ?电机:电机的kv值:1v电压,电机每分钟的空转速度。kv值越小,转动力越大。电机与螺旋桨匹配:螺旋桨越大,需要较大的转动力和需要 的较小的转速就可以提供足够大的升力,因此桨越大,匹配电机的kv值越小。 ?电调:将飞控板的控制信号,转变为电流的大小,控制电机的转速,同时给飞控板供电。电调将电池提供的11.1v的电压变为3.3v为飞控板供电。 ?信号接收器:接收遥控器的信号,给飞控板。通过飞控板供电。 ?遥控器:需要控制俯仰(y轴)、偏航(z轴)、横滚(x轴)、油门(高度),最少四个通道。遥控器分为美国手和日本手。美国手油门(摇杆不自动返回),偏转在左,俯仰,横滚在右。 ?飞控板:通过3个方向的陀螺仪和3轴加速度传感器控制飞行器的飞行姿态。
2.飞行原理 1.1 PID控制(P:比例控制 I:积分控制 D:微分控制): ?比例控制:将控制器输入的误差按照一定比例放大 ?积分控制:但是处于稳态的系统也会有一定的误差,为了消除稳态下的误差,将稳态下的误差在时间上积分,积分项随着时间的增大会趋于0, 因此积分减少了比例控制带来的稳态误差 ?微分控制:根据输入误差信号的变化率(微分)预测误差变化的趋势,避开被控对象的滞后特性,实现超前控制 ?参数调整:根据被控过程的特性不断调整PID控制器的比例系数、积分时间和微分时间的大小 1.2运动原理 四轴旋翼分为“+”和“x”型,“+”型飞控板的正前方是旋翼,“x”型飞控板正前方为夹角等分线。如下图为“x”型四旋翼的飞行原理图。 ?俯仰:绕y轴旋转,前低后高爬升,1,2转速减小,3,4转速增大,pitch 为负 ?横滚:绕x轴旋转,2,3转速增大,1,4转速减小,机体右滚,roll值为正 ?偏航:绕z轴旋转,假设2,4顺时针,1,3逆时针,当2,4转速增大,1,3转速减小时,机头右偏,yaw值为正 ?垂直:调节油门大小,四个旋翼的转速同时变大或者变小 pitch yaw roll值分析:
提高小型无人机螺旋桨效率的工程方法
提高小型无人机螺旋桨效率的工程方法a 马晓平1,宋笔锋2 (1.西北工业大学无人机研究所; 2.西北工业大学航空学院,陕西西安 710072) 摘 要:提高螺旋桨效率一直是螺旋桨设计中的关键问题。常规的螺旋桨设计理论主要是针对大型飞机的。小型低速无人机螺旋桨的工作特点从多方面制约了螺旋桨效率的提高。本文基于多种型号无人机螺旋桨的研制实践,从选用高性能桨型、放宽螺旋桨桨尖马赫数的上限、合理匹配螺旋桨的吸收功率与发动机的输出功率、精选桨材、提高加工工艺质量、加强表面防护等方面,总结出一套提高小型低速无人机螺旋桨效率的工程手段。风洞试验与飞行实践证实了其有效性与可靠性。 关 键 词:无人机,螺旋桨,效率,马赫数 中图分类号:V279 文献标识码:A 文章编号:1000-2758(2004)02-0209-04 目前,小型低速无人机大多以活塞式发动机为动力,螺旋桨是其主要的推进装置。这类螺旋桨的主要特点是:转速高、定距、直径小、前进速度比低、多采用木质材料等,因此效率普遍较低,装机后的实际效率一般低于0.6,比有人飞机低20%以上[1]。由于这类螺旋桨截面工作在较小的雷诺数下,使得螺旋桨效率的提高较为困难。可是,螺旋桨效率的提高,可以在无需改变无人机其它条件下,有效提高无人机的飞行性能。因而,无人机螺旋桨设计者们一直致力于提高其效率。螺旋桨的设计,特别是桨叶的设计是一项综合性的工程技术问题,设计师的任务就是要权衡所有各种利害关系,以求达到最满意的结果。根据多年来多种型号无人机螺旋桨研制实践的经验,本文总结出一套提高小型低速无人机螺旋桨效率的工程手段:采取选用高性能桨型、放宽桨尖马赫数的上限、合理匹配螺旋桨的吸收功率与发动机的输出功率、精选桨叶层合材料、提高加工工艺质量、加强表面防护等措施。风洞试验与飞行实践均已证实这些措施可切实提高无人机螺旋桨效率。 1 螺旋桨设计 小型低速无人机螺旋桨的设计实际上是一个综合优化和权衡的过程。由于不变距和没有减速机构,仅靠一组螺旋桨设计参数想要无人机在起飞、爬升、巡航和最大速度飞行等各个飞行阶段均保持最佳状态是不现实的,因此,只有选择飞机最重要的工作状态作为螺旋桨的设计点,同时注意兼顾其它飞行状态,努力使螺旋桨在飞机的各个飞行阶段均有较好的表现。 1.1 选择合适的桨型 选择螺旋桨的桨叶剖面形状(桨型)如同选择机翼的翼型一样重要,它是设计高效率螺旋桨的基础[1-4]。一般情况下,进行螺旋桨设计时对桨型本身不进行基础研究,但必须根据螺旋桨的使用条件和设计点,沿螺旋桨径向选取合适的桨型分布,使螺旋桨在使用过程中经常保持较好的升阻特性。在桨型的选择过程中,不能只追求理论上的最优,还应考虑工程实现的可能性。例如有的桨型相对厚度较小,翼型后缘很薄,虽然气动特性可能不错,若采用木质材料制造,则很难达到设计要求,发挥其气动效率。 螺旋桨桨型的选择原则主要有: (1)在螺旋桨的设计速度和使用迎角附近,具有较好的升阻特性。 (2)桨型应具有较好的工艺性。除剖面形状加工容易外,对加工精度也应有较好的宽容度,这点对木质螺旋桨尤为重要。 2004年4月第22卷第2期 西北工业大学学报 Jour nal o f No rt hw ester n P olyt echnical U niv ersity A pr.2004 V ol.22N o.2 a收稿日期:2003-04-07 作者简介:马晓平(1961-),西北工业大学研究员,主要从事无人机总体设计的研究。