结构光三维视觉检测中光条图像处理方法研究
视觉测量系统技术及应用
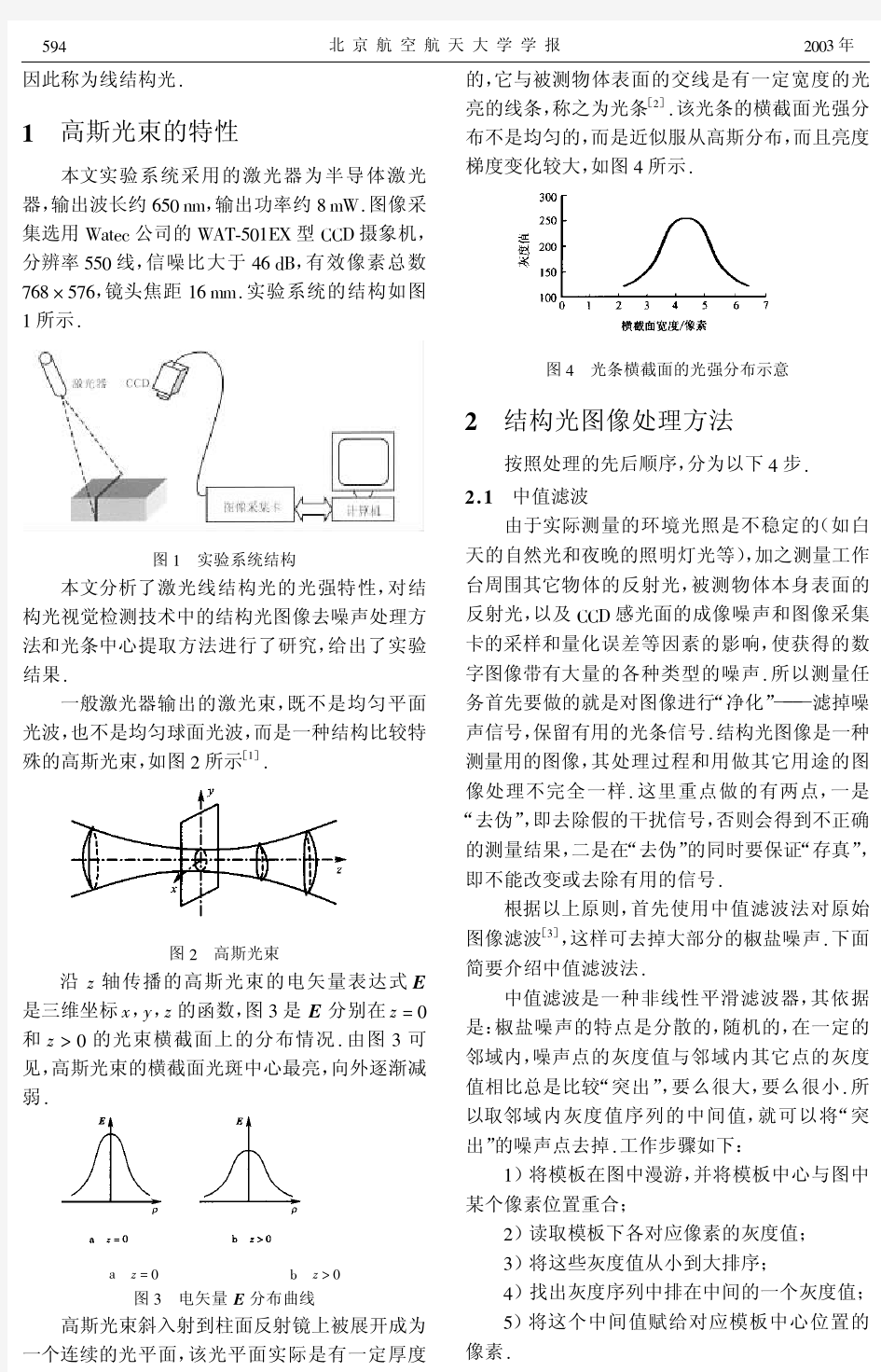
视觉测量系统技术及应用 1 引言 基于计算机的视觉检测系统是指通过计算机视觉产品将被摄取目标转换成图像信号,传送给图像处理系统,图像处理系统再根据像素分布和亮度、颜色等信息,转变成数字化信号,计算机图像系统对这些信号进行复杂运算来抽取目标的特征,进而根据判别的结果来控制设备动作。它具有非接触、速度快等优点,是一种先进的检测手段,非常适合现代制造业。可用于视觉检测的试验原理很多,如纹理梯度法、莫尔条纹法、飞行时间法等,然而诸多测试原理中,尤其基于三角法的主动和被动视觉测量原理具有抗干扰能力强、效率高、精度合适等优点,非常适合在线非接触测量。本文主要从视觉测量系统在实际中应用出发,展示视觉检测技术在制造业中的广阔应用[1-4]。 2 视觉测量系统技术的应用 2.1 汽车车身视觉检测系统 在汽车制造过程中,车身上总有很多关键的三维尺寸进行测量,采用传统的三坐标测量机只能离线抽样检测,效率低,更不能满足现代汽车制造在线检测的需要,而视觉检测系统能很好的适应该需要,典型的汽车车身视觉检测系统如图1所示[5]。 图1 车身视觉检测系统 车身检测系统主要依靠的是数个视觉传感器,其中还包括传送机构、定位机构,计算机图像采集、网络控制部分。每个传感器对应一个被测区域,然后通过传输总线传至计算机,通过计算机对每个视觉传感器进行过程控制。 汽车车身检测系统的测量效率很高,精度式中,并且可以在完全自动情况下完成,这个包含几十个测点的系统都能再几分钟内测量完成,因此可以适应汽车制造的在线检测。而且传感器的布置可以根据不同车型来布置,增加了应用要求,
因此减少了车身视觉系统的维护费用。 2.2 拔丝模孔形视觉检测系统 使用计算机视觉检测技术开发出的拔丝模孔形检测系统由光学成像系统、工业用摄像机图像采集卡、计算机及监视器组成,可以解决生产实际中的模具孔形检测问题.工作原理如下:先采用注入硅胶方法获得反映待检拔丝模尺寸及形状的硅胶凸模,然后把硅胶凸模放在光学系统的载物台上.硅胶凸模经光学成像放大,成像于CCD像面上,然后用图像采集卡采集CCD图像信息,最后由计算机视觉检测软件完成对孔形尺寸的自动计算,此时图像采集时需要配置特殊的光照系统.系统实现了自动数据采集、处理,实现采样、进样、结果一条龙,形成检测的自动化. 2.3 无缝钢管直线度和截面在线视觉检测 无缝钢管是一类重要的工业产品,在反应无缝钢管质量中,钢管直线度及截面尺寸是主要的几何参数。现代工业已经可以实现无缝钢管的大批量大规模生产,并且并无成熟的直线度、截面尺寸高效率的检测系统,主要原因为:无缝钢管空间尺寸大,需要很大的测量空间,一般的检测手段很难实现如此大尺度的检测。然而视觉检测却非常适合无缝钢管及截面尺寸的测量,其测量原理图如图2所示。 多个传感器组成了视觉检测系统,传感器的结构光所投射的光平面与被测钢管相交,从而得到钢管的部分圆周,传感器测量圆周在传感器三维空间位置,每一个传感器实现一个截面圆周测测量,然后通过拟合得到截面的圆心和其空间位置,从而实现对无缝钢管截面和直径的测量。 图2 无缝钢管在线检测 2.4 视觉测量在逆向工程中的应用 逆向工程是针对现有的工件,利用3D数字化测量仪准确快速地测量出轮廓坐标值,并建构曲面,经过编辑、修改后,将图形存档形成一般的CAD/CAM系统,再由CAM所产生刀具的NC加工路径送至CNC加工机制所需模具,或者以快速成型将物品模型制作出来。视觉测量一般使用三种激光光源:点结构光、线结构光、面结构光,图3为使用线结构光测量物体表面轮廓的结构示意图[6]。
结构光方法测量过程主要包括两个步骤
结构光方法测量过程主要包括两个步骤: 第一步:由激光投射器根据测量需要投射可控制的光点、光条或光面结构光到物体 表面形成特征点,并调节CCD 摄像机与视频采集软件,拍摄关于特征点的图像。 第二步: 建立合理的坐标系。然后由物体表面投射光图案的几何形态特征,通过滤噪,图像处理等步骤,提取得到特征点形成的像素坐标。再通过模式识别判断物体表 面形状,利用激光器和CCD 摄像机在空间中的位置等参数,利用三角法测量原理反求 得原特征点的坐标。 在实际应用中,线结构光测量系统由于其快速、精确、稳定性好,而且结构简单, 易于实现,相比点结构光提高了效率,又避免了面结构光方法的复杂性,因此在各个 应用领域,如制造业、军事、医学上获得了更广泛的应用。本项目中采用的也是 线结构光系统,因此本论文的内容都围绕线结构光测量系统展开。 线结构光法比起点结构光法,测量得到的信息量大大增加,而其实现的系统复杂 性并没有增加,因而得到了广泛应用。该方法也是基于三角测量原理,所不同的是采 用线光源代替点光源。由激光器投射线激光作为光源,与物体表面相交时,在物体表 面产生亮光条。该光条由于物体表面形状的变化而受到调制,表现在图像中则是光条发生了偏移和断续,偏移的程度与形状有关。通过这种关系,对CCD 拍摄到的图像进 行处理,就可以求取物体的形状。 线结构光测量系统的研究现状 目前,对线结构光测量系统的研究,主要集中在模式识别与标定方法的研究上。 这就需要对CCD 摄像机拍摄的图像进行处理,通过滤噪与二值化,光条中心提取等步 骤提取出有用信息后,对信息进行分析,来判断出被测物体的形状与位置。 其中,对滤噪有各种线性与非线性滤波器方法;二值化处理要设计合适的阈值; 对光条中心提取这一步有细化法、水平中值法、灰度重心法、阈值法 等;对被测物体形状的识别,有基于Hough 变换的圆检测、线检测等方法;标定方法则有直接线性法标定 、基于简单三角法的几何标定、基于多幅图像对应点变换的自标定方法、基于非数学的方法如人工神经网络法等。 线结构光三维视觉检测模型的建立,主要方法有:基于较精确数学模型的解析三 角法、基于透视投影的方法、和基于非数学模型的方法,如神经网络法等。根据具体 的检测情况与精度与效率要求,模型建立的方法也是多种多样的 在线结构光测量系统中,一般要用到三种坐标系:世界坐标系,摄像机坐标系与 图像坐标系 滤噪 滤波算法分为空域滤波,频域滤波与二值形态学滤波三大类 [11] 。其中空域主要有
机器视觉测量技术
机器视觉测量技术 杨永跃 合肥工业大学 2007.3
目录第一章绪论 1.1 概述 1.2 机器视觉的研究内容 1.3 机器视觉的应用 1.4 人类视觉简介 1.5 颜色和知觉 1.6 光度学 1.7 视觉的空间知觉 1.8 几何基础 第二章图像的采集和量化 2.1 采集装置的性能指标 2.2 电荷藕合摄像器件 2.3 CCD相机类 2.4 彩色数码相机 2.5 常用的图像文件格式 2.6 照明系统设计 第三章光学图样的测量 3.1 全息技术 3.2 散斑测量技术 3.3 莫尔条纹测量技术 3.4 微图像测量技术 第四章标定方法的研究 4.1 干涉条纹图数学形成与特征 4.2 图像预处理方法 4.3 条纹倍增法 4.4 条纹图的旋滤波算法 第五章立体视觉 5.1 立体成像
5.2 基本约束 5.3 边缘匹配 5.4 匹域相关性 5.5 从x恢复形状的方法 5.6 测距成像 第六章标定 6.1 传统标定 6.2 Tsais万能摄像机标定法 6.3 Weng’s标定法 6.4 几何映射变换 6.5 重采样算法 第七章目标图像亚像素定位技术 第八章图像测量软件 (多媒体介绍) 第九章典型测量系统设计分析9.1 光源设计 9.2 图像传感器设计 9.3 图像处理分析 9.4 图像识别分析 附:教学实验 1、视觉坐标测量标定实验 2、视觉坐标测量的标定方法。 3、视觉坐标测量应用实验 4、典型零件测量方法等。
第一章绪论 1.1 概述 人类在征服自然、改造自然和推动社会进步的过程中,面临着自身能力、能量的局限性,因而发明和创造了许多机器来辅助或代替人类完成任务。智能机器或智能机器人是这种机器最理想的模式。 智能机器能模拟人类的功能、能感知外部世界,有效解决问题。 人类感知外部世界:视觉、听觉、嗅觉、味觉、触觉 眼耳鼻舌身 所以对于智能机器,赋予人类视觉功能极其重要。 机器视觉:用计算机来模拟生物(外显或宏观)视觉功能的科学和技术。 机器视觉目标:用图像创建或恢复现实世界模型,然后认知现实世界。 1.2 机器视觉的研究内容 1 输入设备成像设备:摄像机、红外线、激光、超声波、X射线、CCD、数字扫描仪、 超声成像、CT等 数字化设备 2 低层视觉(预处理):对输入的原始图像进行处理(滤波、增强、边缘检测),提取角 点、边缘、线条色彩等特征。 3 中层视觉:恢复场景的深度、表面法线,通过立体视觉、运动估计、明暗特征、纹理 分析。系统标定 4 高层视觉:在以物体为中心的坐标系中,恢复物体的完整三维图,识别三维物体,并 确定物体的位置和方向。 5 体系结构:根据系统模型(非具体的事例)来研究系统的结构。(某时期的建筑风格— 据此风格设计的具体建筑) 1.3 机器视觉的应用 工业检测—文件处理,毫微米技术—多媒体数据库。 许多人类视觉无法感知的场合,精确定量感知,危险场景,不可见物感知等机器视觉更显其优越十足。 1 零件识别与定位
结构光三维视觉测量
结构光三维视觉测量 1、应用简介结构光视觉方法的研究最早出现于20 世纪70 年代。在诸多的视觉方法中,结构光三维视觉以其大量程、大视场、较高精度、光条图像信息易于提取、实时性强及主动受控等特点,近年来在工业三维测量领域得到了广泛的应用。 2、系统设计原理、方框图、原理图结构光三维视觉是基于光学的三角法测量原理。如图所示,光学投射器(可以是激光器,也可以是投影仪)将一定模式的结构光投射于物体的表面,在表面形成由被测物体表面形状所调制的光条三维图像。该三维图像由处于另一位置的摄像机摄取,从而获得光条二维畸变图像。光条的畸变程度取决于取决于光学投射器与摄像机之间的相对位置和物体表面形廓(高度)。直观上,沿光条显示出的位移(或偏移)与物体的高度成比例,扭结表示了平面的变化,不连续显示了表面的物理间隙。当光学投射器与摄像机之间的相对位置一定时,由畸变的二维光条图像坐标便可重现物体表面的三维形廓。结构光三维视觉测量系统由光学投射器、摄像机、和计算机系统三部分构成。根据光学投射器所投射的光束模式的不同,结构光模式可分为点结构光模式、线结构光模式、多线结构光模式和网格结构光模式。线结构光模式复杂度低、信息量大,应用最为广泛。下图为线结构光打在标定板和被测物体的光条图像。 3、选型原则、精度分析结构光视觉传感器的测量精度受诸多因素的影响,如摄像机本身的光学物理参数、光学投射器特征参数、传感器本身的结构参数及外界干扰源等等。在摄像机、光学投射测量环境一定的情况下,测量系统的结构参数对测量精度影响很大。实验和相关理论推导表明,测量点的定位误差和系统结构相关性如下:1)摄像机光轴和光 平面垂直时,深度方向的测量误差最小。2)摄像机与光学投射器距离越远, 测量误差越小。3)摄像机镜头放大倍率越小,测量误差越小;这也表面被测
一种基于机器视觉的结构光三维扫描系统
一种基于机器视觉的结构光三维扫描系统 0 引言 随着制造技术的快速发展和制造领域的不断扩大,使得对制造产品的质量要求也越来越高。传统意义上很多对产品的检测方法已经不能适应现代制造业的要求。计算机视觉检测技术具有操作、维护简单,测量速度快,精度高,测量范围广等众多无可比拟的优点,被认为是检测技术领域中最具有发展潜力的技术。机器视觉被称为自动化的眼睛,在国民经济、科学研究及国防建设上都有着广泛的应用。机器视觉不但可以实现无接触观测,还可以长时间保持精度,因此,机器视觉系统可以广泛应用于长时间的、恶劣的环境。 在此探讨了线性结构光三维扫描系统的特点。设计一种能够测量物体深度的结构光三维扫描系统,通过图像处理技术对激光条纹进行提取,并建立数学模型,采用三角法测量方法获取深度信息,对工件图像进行重建。最后,实验结果验证了该系统的有效性。 1 基于机器视觉的结构光三维扫描系统模型结构光测量是将激光器发出的光束经过光学系统形成某种形式的光,包括点、单线、多线、单圆、同心多圆、网格、十字交叉、灰度编码图案、颜色编码图案和随机纹理投影等投向景物,在景物上形成特定的图案,并通过图像处理,对图案进行提取,然后根据三角法进行计算,从而得到景物表面的深度信息。根据投射光图案的种类可分为单点法、单线法和图案法。1.1 系统的硬件结构设计 如图 1 所示,文中所设计的结构光三维扫描系统由3大部分组成,分别 是运动平台、激光器和摄像机。系统的运动平台由导轨丝杠机构成,丝杠上的滑块带动工件左右运动,丝杠由伺服马达驱动。摄像机垂直于导轨运动平面。激光器和摄像机与摄像机呈固定角度安装。激光器所射出的线形光斑垂直于工件的运动方向。激光器与摄像机的相对角度可以调节,调节范围由20~?45。之间。运动平台行程为100 mm,图像分辨率为0. 2 mm/pixel。 1.2 系统的数学模型建立 系统的数学模型如图2所示。工件放置于运动平台上,摄像机垂直安装在运动平台正上方,激光与水平面的夹角B,激光器产生一字的线性结构光, 由于物体表面与运动平台的高度差,条形光斑同时照射在物体上的A处和平台的B处。用摄像机获得光斑的图像,经图像采集卡输入至计算机,经过图像处理,可以测量出点A与点B的距离d,根据三角法公式tan 9 =H/d,可以通过光斑间距d 计算出工件的高度H。因此物坐标和像坐标对应关系为:其中:xg,yg,zg 分别为物坐标;k 为像素一毫米转换系数;xi ,yi 分别为图像坐标。 2 结构光光斑提取的相关理论与方法 从系统的数学模型可知,物体的深度信息H主要受9和d的影响,而9主要表现为系统误差。因此,有必要对条纹间距d进行深入研究,以提高系统的精度。其主要包括:图像增强、图像二值化以及图像细化。 2.1 图像增强图像增强主要增加图像的对比度,突出图像中的高频部分。算法描述为:设原图像的灰度级为x,其最大和最小灰度级分别为xmax和xmin期望图像
机器视觉测量技术
机器视觉测量技术杨永跃合肥工业大学 2007.3 目录 第一章绪论 1.1 概述 1.2 机器视觉的研究内容 1.3 机器视觉的应用 1.4 人类视觉简介 1.5 颜色和知觉 1.6 光度学 1.7 视觉的空间知觉 1.8 几何基础 第二章图像的采集和量化 2.1 采集装置的性能指标 2.2 电荷藕合摄像器件 2.3 CCD 相机类 2.4 彩色数码相机 2.5 常用的图像文件格式
2.6 照明系统设计 第三章光学图样的测量 3.1 全息技术 3.2 散斑测量技术 3.3 莫尔条纹测量技术 3.4 微图像测量技术 第四章标定方法的研究 4.1 干涉条纹图数学形成与特征4.2 图像预处理方法 4.3 条纹倍增法 4.4 条纹图的旋滤波算法 第五章立体视觉 5.1 立体成像 2 5.2 基本约束 5.3 边缘匹配 5.4 匹域相关性 5.5 从 x 恢复形状的方法 5.6 测距成像
第六章标定 6.1 传统标定 6.2 Tsais 万能摄像机标定法 6.3 Weng ’ s 标定法 6.4 几何映射变换 6.5 重采样算法 第七章目标图像亚像素定位技术第八章图像测量软件 (多媒体介绍 第九章典型测量系统设计分析9.1 光源设计 9.2 图像传感器设计 9.3 图像处理分析 9.4 图像识别分析 附:教学实验 1、视觉坐标测量标定实验 2、视觉坐标测量的标定方法。 3、视觉坐标测量应用实验 4、典型零件测量方法等。
3 第一章绪论 1.1 概述 人类在征服自然、改造自然和推动社会进步的过程中,面临着自身能力、能量的局限性, 因而发明和创造了许多机器来辅助或代替人类完成任务。智能机器或智能机器人是这种机器最理想的模式。 智能机器能模拟人类的功能、能感知外部世界,有效解决问题。 人类感知外部世界:视觉、听觉、嗅觉、味觉、触觉 眼耳鼻舌身 所以对于智能机器,赋予人类视觉功能极其重要。 机器视觉:用计算机来模拟生物(外显或宏观视觉功能的科学和技术。 机器视觉目标:用图像创建或恢复现实世界模型,然后认知现实世界。 1.2 机器视觉的研究内容 1 输入设备成像设备:摄像机、红外线、激光、超声波、 X 射线、 CCD 、数字扫描仪、超声成像、 CT 等 数字化设备 2 低层视觉(预处理 :对输入的原始图像进行处理(滤波、增强、边缘检测 ,提取角点、边缘、线条色彩等特征。 3 中层视觉:恢复场景的深度、表面法线,通过立体视觉、运动估计、明暗特征、纹理分析。系统标定
教你怎么看三维立体图片
教你怎么看三维立体图片 - 三维立体图是采用平行视觉技术设计的。 如果你掌握了观看技巧,就可以在看似什么都不是的图片中看到真实的三维立体效果:除了背景图片以外,还有两层或多层突出平面以上的立体物体,如果你移动你的头部,还可以看到物体背后的部分背景,与现实世界完全一样,真实奇妙无比! 三维立体画的看图技巧:首先要让你的眼睛休息三分种,在三维立体画上方中间位置用视线确定两个点,然后用稍微模糊的视线越过三维立体画眺望远方; 另外还有两种方法介绍给大家: 第二种方法是先看着屏幕上反射的自己的影象,然后缓缓地将视觉注意力转向图片,但注意眼球不要转动,不要盯着图片中的细节看,而是模糊地看着图片的全貌...... 第三种方法是先将你的脸贴近屏幕并且眼光好象穿过屏幕,然后缓缓地拉开距离,不要使眼睛在图片上聚焦,但又要保持你的视线,边拉开边放松视觉,直到三维效果显现出来。 原理及练习方法: 三维立体画是利用人眼立体视觉现象制作的绘画作品。普通绘画和摄影作品,包括电脑制作
的三维动画,只是运用了人眼对光影、明暗、虚实的感觉得到立体的感觉,而没有利用双眼的立体视觉,一只眼看和两只眼看都是一样的。充分利用双眼立体视觉的立体画,将使你看到一个精彩的世界。 一、立体视觉和立体画原理人有两只眼,两只眼有一定距离,这就造成物体的影象在两眼中有一些差异,见右图,由图可见,由于物体与眼的距离不同,两眼的视角会有所不同,由于视角的不同所看到是影象也会有一些差异,大脑会根据这种差异感觉到立体的景象。 三维立体画就是利用这个原理,在水平方向生成一系列重复的图案,当这些图案在两只眼中重合时,就看到了立体的影象。参见下图,这是一幅不能再简单的立体画了。图中最上一行圆最远,最下一行圆最近,请注意:最上一行圆之间距离最大,最下一行圆之间距离最小。 这是怎么发生是呢?让我们再看下图,从图中我们可以看到,重复图案的距离决定了立体影象的远近,生成三维立体画的程序就是根据这个原理,依据三维影象的远近,生成不同距离的重复图案。 二、立体画的观看如果你现在还不会看立体画,是不是已经很着急了,下面我将介绍怎样看立体画。 立体画有两种形式:第一种是由相同的图案在水平方向以不同间隔排列而成,看起来是远近不同的物体,请看下图。这样的立体画可用任意一种图象处理软件制作,如Photoshop、Windows画笔等,你也可以一试。 另一种立体画较复杂,在这种立体画上你不能直接看到物体的形象,画面上只有杂乱的图案,制作这样的立体画只有使用程序了,我为此编写了一些程序,有C和QBASIC的源程序,请看自制立体画和程序下载。两种作品看法是一样的,原理都是使左眼看到左眼的影象,让右眼看到右眼的影象,(有人说了:你这不是废话吗?)听我说具体的方法:当你看立体画时,你要想象你在欣赏玻璃橱窗中的艺术品,也就是说你不要看屏幕上的立体画,而要把屏幕看成是玻璃橱窗的玻璃,你要看的是玻璃之内的影象。 三、两点练习法请把下图上方的两点作为目标,先使眼睛休息片刻,然后象眺望远方那样,用稍模糊的视线瞄准两点,就会看从两点各自分离出另外两个点,然后调整视线,试图将里面两个点合成一点,当四点变为三点时,你便会看到立体图象。 四、另一种观看方法从电脑上看费劲的话,可以这样,如果画面上标有两点(如没有,可以通过仔细观看,在横向上,相隔约3-5厘米,就有相同的图案,如两个相同颜色和大小的点等),那么可以用两个颜色深点的线垂直粘在显示器屏幕的上面(可以进入屏幕少许),使
双目立体视觉中的三维重建
西安邮电大学 毕业设计(论文)题目:双目立体视觉中的三维重建 系别:自动化学院 专业:测控技术与仪器 班级:测控0802班 学生姓名:吕海斌(07) 导师姓名:江祥奎职称:讲师 起止时间:2012年3月8日至2012年6月20
诚信声明书 本人声明:我将提交的毕业论文《双目立体视觉中的三维重建》是我在指导教师指导下独立研究、写作的成果,论文中所引用他人的无论以何种方式发布的文字、研究成果,均在论文中加以说明:有关教师、同学和其他人员对本文的写作、修订提出过并为我再论文中加以采纳的意见、建议,均已在我的致谢中加以说明并深致谢意。 论文作者吕海斌时间:2012年6 月7 日 指导教师已阅时间:年月日
西安邮电大学 毕业设计(论文)任务书 学生姓名吕海斌指导教师江祥奎职称讲师 院别自动化学院专业测控0802 题目双目立体视觉中的三维重建 任务与要求 本题目要求在搭建双目立体视觉平台的基础上,通过OpenGL和MATLAB联合编程实现三维重建功能。具体任务分解如下: 1.查找文献,学习和掌握三维重建方法; 2.完成三维重建的MATLAB编程,并对实验数据进行相关分析;3.通过OpenGL,实例编程实现三维重建; 4.通过OpenGL和MATLAB联合编程,完成三维重建; 开始日期2011年12月10日完成日期2012年6月25日 院长(签字) 2012 年12 月日
西安邮电大学 毕业设计 (论文) 工作计划 学生姓名__吕海斌_指导教师__江祥奎__职称__讲师_ 院别____自动化学院____专业____测控0802___ 题目_____ 双目立体视觉中的三维重建 工作进程
结构光技术
1结构光技术 干涉测量法 干涉测量法(Interferometry)是常用的高精度、高分辨率测量方法之一,它是利用光的干涉原理对物体进行测量的。当物体波前与参考波前满足干涉条件时,物体波前与 参考波前发生干涉产生干涉条纹,从干涉条纹形变情况可以测出被测物体的几何形状(5]0 传统的干涉测量法多采用条纹细化技术得到千涉条纹中心,然后检测条纹中心相对参考 基准的偏移量来计算物体的几何形状。由于计算条纹中心位置的误差较大,所以采用此 方法的测量误差较大。随着激光技术的发展,出现了双光束干涉、多光束干涉、外差干涉、全息千涉等方法。全息干涉测量对测量环境的要求较高,系统侧量稳定性易受到光 学散斑、震动、湿度、气压以及温度等因素影响,若采用共光路设计和同时相移技术, 可以有效地抑制震动对测量结果的影响。 2. 4结构光法 结构光方法((Structured Light)是一种主动式光学测t技术,其基本原理是由结构 光投射器向被测物体表面投射可控制的光点、光条或光面结构,并由图像传感器(如摄 像机)获得图像,通过系统几何关系,利用三角原理计算得到物体的三维坐标。结构光 测量方法具有计算简单、体积小、价格低、大盆程、便于安装和维护的特点,在实际三 维轮廓测量中被广泛使用,但是测量精度受物理光学的限制,存在遮挡问题,测量精度 与速度相互矛盾,难以同时得到提高。 光点式结构光测量方法需要通过逐点扫描物体进行测量,图像摄取和图像处理需要 的时间随着被测物体的增大而急剧增加,难以完成实时测量。用线结构光代替点光源, 只需要进行一维扫描就可以获得物体的深度图,图像获取和图像处理的时间大大减少 (io)。如图为线结构光的示意图,利用辅助的机械装置旋转光条投影部分,从而完成 对整个被测物体的扫描。 当采用光面结构光时,将二维的结构光图案投射到物体表面上,这样不需要进行扫 描就可以实现三维轮廓测量,测量速度很快,光面结构光中最常用的方法是投影光栅条 纹到物体表面[}m,i2}。如图所示为面结构光的示意图。 当投影的结构光图案比较复杂时,为了确定物体表面点与其图像像素点之间的对应 关系,需要对投射的图案进行编码,因而这类方法又称为编码结构光测量法。图案编码 分为空域编码和时域编码。空域编码方法只需要一次投射就可获得物体深度图,适合于
三维立体视觉的提取
三维立体视觉信息的提取 一、问题背景 (1) 一、实现方法 (1) 1.图像的获取与预处理 (1) 2.边缘信息提取 (2) 3.边缘检测与轮廓连结 (3) 4.利用线条分类识别三维物体 (4) 二、从二维图像中提取三维特征的局限性 (6)
一、问题背景 机器视觉是机器人感知周围环境的主要途径之一。 所谓机器人视觉即:使机器人具有视觉感知功能的系统。机器人视觉可以通过视觉传感器获取环境的二维图像,并通过视觉处理器进行分析和解释,进而转换为符号,让机器人能够辨识物体,并确定其位置。为了判断一个物体在空间的位置和形状,机器人往往需要获取两类信息,即明暗信息和距离信息。目前成熟的光电成像技术都只能捕获二维明暗信息,而不能获得距离信息,所以直接通过这种途径获得的机器视觉也只能是二维的。 随着科学技术的发展,三维立体视觉的解决方案也如雨后春笋般涌出,其中就包括双目立体视觉(多镜头法),狭缝光投影法,时间差法等,但是如果能够要通过对二维图像(准确地说是2.5维图像,即含有透视关系的二维图像)的特征进行提取,并进而得到三维信息的话,无疑可以大幅度降低系统的复杂度。 本文将论述一种从二维图像中提取三维信息的方法。这种方法对二维图像的边缘进行识别的处理,通过边缘的连接模式判断出视野中物体的三维特征。这种方式输出的输出结果是一种与物体的三维结构相对应的二维特征组,后续处理也较为方便。 一、实现方法 1.图像的获取与预处理 用于进行三维特征提取的图像是一幅常规的二维灰度图,所以使用一个常规的CCD或CMOS图像传感器即可满足要求。图像需要进行量化处理,即把图像信息分成许多像素点,这些亮点经过A/D转换后即可输入计算机进行处理。 大多数情况下,图像传感器获得的图像并不完美,其中难免会出现暗点或亮点。图像中的这些暗点和亮点统称“噪点”。噪点不仅降低了图像的分辨率,还会对后期的特征提取等处理造成很大的干扰,甚至引起识别错误。此外由于外界光线强度的变化,图像的亮度分布也时刻在变化,为了给形态学处理的图像提供统一的条件,计算机在把获得图像进行形态学处理前,必须先对其进行预处理。 降噪是一种常见的预处理形式,与其对应的算法成为滤波算法。常见的滤波算法分为线性滤波和非线性滤波,线性滤波又分为均值滤波和高斯滤波等。线性滤波器的主要原理是二维卷积,也就是把某一像素点的亮度用周围一定范围的像素的亮度的某种运算组合来表示,下式就表示了一个3x3的均值滤波器的算子: 非线性滤波器(如中值滤波器)虽然没有采用卷积运算,但它也类似的在原始图像中取出一个范围,并对这个把处于这个范围的中心的像素的亮度用这个范围内
一款结构光三维扫描测量装置的设计
计算机时代2018年第9期 0引言 近年来,3D打印技术与虚拟现实技术的快速发展,为3D测量与数字建模技术打开了广阔的应用市场。结构光三维扫描仪因其扫描精度高、测量速度快、获取的点云密集等特点,被广泛应用于工业检测、机械仿制、文物保护等领域。尽管相关产品已广泛投放市场,但对于初涉该项技术的研究者和开发者而言,公开发表的相关技术资料还非常稀少。有鉴于此,本文介绍了一款结构光栅三维扫描仪的设计过程,为研究者和应用开发者搭建实验平台提供一些参考,有助于推广结构光3D扫描技术在我国的应用。 1主要部件选型 所开发的结构光三维扫描仪由双目相机、光栅投影仪两个主要光电部件构成。 ⑴光栅投影机 出于性能考虑,本文采用巨维达PDC03型结构光栅投影机[1]。其主板输入输出接口如图1 所示。 ①MiniUSB接口②外触发输出接口 图1PDC03型结构光栅投影机 DOI:10.16644/https://www.360docs.net/doc/20125619.html,33-1094/tp.2018.09.001 一款结构光三维扫描测量装置的设计 魏茂1,王修竹2,刘涌2 (1.中共绵阳市委党校,四川绵阳621000;2.西南科技大学计算机科学与技术学院) 摘要:结构光三维扫描仪具有高速度、高精度、获取的点云密集等特点,得到了市场的广泛认可,广泛应用于精细化测量领域。基于时间相位展开算法和双目视觉原理,利用工业相机和光栅投影仪构建了一套结构光栅三维扫描测量实验装置,较为全面地阐述了设计方案和设计步骤,为从事三维结构光测量的研究者和应用开发者提供了一种参考方案。实验结果表明,该装置能够有效地支持结构光扫描,具有较高的测量精度。 关键词:三维测量;结构光栅投影;立体视觉;测量装置 中图分类号:TP391文献标志码:A文章编号:1006-8228(2018)09-01-03 Design of a structured light3D scanning measurement device Wei Mao1,Wang Xiuzhu2,Liu Yong2 (1.Party College of Mianyang Committee of CCP,Mianyang,Sichuan621000,China; 2.School of Computer Science and Technology,Southwest University of Science and Technology) Abstract:Structured light3D scanner has been widely recognized in the market and used in three-dimensional measurement fields because of its characteristics of high speed,high precision and dense point cloud.In this paper,a set of experimental device for 3D scanning measurement of structural grating is constructed using industrial camera and grating projector based on temporal phase unwrapping and stereo vision.The specific design scheme and design steps are described in detail,which provides a reference scheme for researchers and application developers engaged in3D structural light measurement.The experimental results show that the device can effectively support structured light scanning and has high measurement accuracy. Key words:three-dimensional measurement;structured grating;stereo vision;measurement device · ·1
机器视觉检测技术简介及其特点
机器视觉检测技术简介及其特点 中国纸板商城https://www.360docs.net/doc/20125619.html,2012年3月2日机器视觉印刷质量检测是一种模拟人工检测方法和判断逻辑,但同时又具有更高检测精度和更好一致性的自动化检测方法。 一、机器视觉检测的特点 1、机器视觉检测技术简介 机器视觉,简而言之就是利用机器代替人工进行目标识别、判断与测量。它是现代光学、电子学、软件工程、信号处理与系统控制技术等多学科的交叉与融合。 光学采集设备:由工业摄像机、光源及配套图像采集卡等硬件组成。主要作用是获取通过采集位置的标签的数字图像,为后续的分析与处理提供素材,相当于人工检测的眼睛。 判断识别:由工业控制计算机及植入的图像处理与分析软件、控制软件构成。是视觉检测的核心部分,最终形成缺陷的判断并能向后续执行机构发出指令。 自动控制:最终将检测系统的结果变换成具体操作的硬件,比如常见的声光报警器、废品剔除装置或作标记的装置(如喷墨机、贴标机等)。 除此之外,印刷检测设备还必须有一套稳定的机械传输控制平台,对于安装在印刷机上的在线检测系统而言,传输平台就是印刷机;而对于离线检测系统,则需要单独配置传输平台,如复卷机、单张传输平台等。 2、印刷缺陷检测原理 印刷缺陷检测主要依靠图像比对的方法进行。如图2所示,上部图像是通过相机采集到的实时图像,而下部图像为事先采集并存储下来的标准图像。检测时,首先将两幅图像通过定位等方法使其重合,然后进行逐点(逐像素)对比颜色(或亮度差异)。当他们之间的差异超出事先设定的范围时即判为缺陷。 3、机器视觉检测特点 一套高品质的机器视觉检测系统,必须具备以下几个必备条件: 1)高品质的成像系统 成像系统被称为视觉检测设备的“眼睛”,因此“眼睛”识别能力的好坏是评价成像系统的最关键指标。通常,成像系统的评价指标主要体现在三个方面: 能否发现存在的缺陷 基于图像方法进行的检测,所能够依据的最原始也是唯一的资料即是所采到的图像上的颜色(或者亮度)变化,除此之外,没有其他资料可供参考。所以,一个高品质的成像系统首先应该是一个能充分表现被检
基于结构光视觉的钢轨磨耗测量方法_孙军华
2010年9月第36卷第9期北京航空航天大学学报J o u r n a l o f B e i j i n g U n i v e r s i t y o f A e r o n a u t i c s a n d A s t r o n a u t i c s S e p t e m b e r 2010 V o l .36 N o .9 收稿日期:2009-07-16 基金项目:国家自然科学基金资助项目(50727502,60804060);铁道部科技研究开发计划资助项目(2008G 020-C ) 作者简介:孙军华(1975-),男,湖北荆门人,副教授,s j h @b u a a .e d u .c n . 基于结构光视觉的钢轨磨耗测量方法 孙军华 王伟华 刘 震 张广军 (北京航空航天大学仪器科学与光电工程学院,北京100191) 摘 要:分析了基于结构光视觉的钢轨磨耗测量原理,提出一种钢轨磨耗车载动态测量方法.结构光视觉传感器安装在列车底部,测量钢轨内侧横断面轮廓.以钢轨轨腰轮廓作为测量基准,利用最近点迭代(I C P ,I t e r a t i v e C l o s e s t P o i n t )算法确定光平面测量坐标系到设计 坐标系的旋转矩阵和平移向量,将测量轮廓与设计轮廓对齐,在此基础上计算磨耗值.与已有的方法相比,该方法无需单独设置用于基准测量的视觉传感器,采用同一传感器实现了基准测量和磨耗测量,有效降低了系统成本,操作性强,且无需进行多传感器的全局校准,保证了测量精度.实验结果表明:该钢轨磨耗测量方法具有较好的重复性精度. 关 键 词:钢轨磨耗;结构光;基准对齐;最近点迭代匹配中图分类号:T N 247 文献标识码:A 文章编号:1001-5965(2010)09-1026-04 R a i l w e a r m e a s u r e m e n t m e t h o d b a s e d o n s t r u c t u r e d -l i g h t v i s i o n S u n J u n h u a W a n g W e i h u a L i u Z h e n Z h a n g G u a n g j u n (S c h o o l o f I n s t r u m e n t S c i e n c ea n dO p t o -e l e c t r o n i c s E n g i n e e r i n g ,B e i j i n gU n i v e r s i t y o f A e r o n a u t i c s a n dA s t r o n a u t i c s ,B e i j i n g 100191,C h i n a ) A b s t r a c t :T h e p r i n c i p l e o f r a i l w e a r m e a s u r e m e n t b a s e d o n s t r u c t u r e d -l i g h t v i s i o n w a s a n a l y z e d .Am e t h -o d f o r d y n a m i c a l l y m e a s u r i n g r a i l w e a r s i nv e h i c l e -m o u n t e dw a s p r o p o s e d .T h e s t r u c t u r e d -l i g h t v i s i o ns e n s o r w a s i n s t a l l e d a t t h e b o t t o m o f t h e t r a i n ,a n d t h e s e c t i o n p r o f i l e o f t h e r a i l w a s m e a s u r e d .T a k i n g r a i l w a i s t a s m e a s u r e m e n t b e n c h m a r k ,t h e r o t a t i o nm a t r i x a n dt r a n s l a t i o n v e c t o r b e t w e e n l i g h t -p l a n e c o o r d i n a t e f r a m e a n d d e s i g n e d c o o r d i n a t e f r a m e w e r e e s t i m a t e d b y i t e r a t i v e c l o s e s t p o i n t (I C P )a l g o r i t h m ,t h e n ,t h e r a i l w a i s t p r o -f i l e w a s r e g i s t e r e d t o d e s i g n e d p r o f i l e ,b a s e d o n w h i c h t h e r a i l w e a r s w e r e c a l c u l a t e d .C o m p a r e d w i t h p r e v i o u s m e t h o d s ,t h e p r o p o s e d m e t h o d d o e s n o t n e e d a s p e c i a l l y v i s i o n s e n s o r t o m e a s u r e t h e b e n c h m a r k . B e n c h m a r k m e a s u r e m e n t a n d w e a r m e a s u r e m e n t a r e a c h i e v e dw i t h o n e s a m e v i s i o n s e n s o r .S y s t e m c o s t i s e f f e c t i v e l y r e -d u c e d ,a n d i t i s o p e r a b l e .M e a s u r e m e n t a c c u r a c y i s a l s o g u a r a n t e e d d u e t o n o n e e d o f g l o b a l c a l i b r a t i o no f m u l t i -s e n s o r .T h e e x p e r i m e n t a l r e s u l t s s h o wt h a t t h e r e p e a t a b i l i t y p r e c i s i o n o f t h e m e t h o d i s h i g h . K e y w o r d s :r a i l w e a r ;s t r u c t u r e d -l i g h t ;b e n c h m a r k a l i g n m e n t ;i t e r a t i v e c l o s e s t p o i n t 钢轨磨耗检测是铁路安全运营的重要保证,对于制定合理的铁路运输计划和降低维护成本非常重要 [1-2] .长期以来,对钢轨磨耗的检测都是由 人工采用专用卡尺抽样检测,这种方式效率低下, 无法实现动态测量,且耗费大量人力物力,在测量中不可避免地引入了测量者的人为因素,影响了测量的精度和可靠性. 目前,随着机器视觉测量技术的发展与日臻 成熟,基于结构光视觉的钢轨磨耗测量已受到广泛的重视.磨耗的测量均需选取有效的测量基准,将视觉传感器测量得到的钢轨轮廓与标准设计轮廓对齐,然后根据磨耗定义计算磨耗值.文献[3] 选取钢轨头部未被磨损的一侧作基准,采用一种基于近景摄影测量中的二维直接线性解析纠正方法,通过坐标变换实现左右轮廓图像的对准.该方法光条不易受遮挡,便于在线处理.但需要两个视 DOI :10.13700/j .bh .1001-5965.2010.09.023
基于结构光和机器视觉的尺寸测量及其误差分析(精)
包装工程 P A CK A GIN G EN G IN EERI NG Vo l. 32N o. 92011. 05 66 收稿日期:2011 03 01 基金项目:湖北省自然科学基金项目(2009CDB313 ; 湖北省教育厅项目(Q 20091404 作者简介:钟飞(1970- , 男, 武汉人, 硕士, 湖北工业大学副教授, 主要研究方向为包装过程检测与控制。 基于结构光和机器视觉的尺寸测量及其误差分析 钟飞, 吴雪茹 (湖北工业大学, 武汉430068 摘要:为了解决流水线上产品的尺寸自动测量难的问题, 基于目前机器视觉在尺寸测量方面的应用, 介绍了用机器视觉来检测线圈绕线质量的方案。采用简化了的针孔模型对相机进行标定, 并针对CCD 成像元的不均匀性, 提出改进方案并对测量结果进行误差修正, 通过实验完善并验证了该方案的可行性, 为机器视觉测量尺寸提供理论基础。 关键词:误差分析; 机器视觉; CCD; 结构光 中图分类号:T B486; T B487 文献标识码:A 文章编号:1001 3563(2011 09 0066 04 Size M e asure me nt and Error Analysis of Machine Visio n Base d on Structured Light ZH ON G F ei, W U X ue ru (H ubei U niver sity o f T echnolog y, Wuhan 430068, China
Ab stract:A project o f using machine vision to detect the quality of coil w inding was intro duced based o n cur rent applicatio n o f machine vision in size measurement to solve the difficulty of measur ing pro duct size on product ion line. A simplified pinho le mo del was applied t o calibr ate camer a. Impr ovement method to co rr ect measurement er ror was put forw ar d to so lv e the no nunifor mity pro blem of CCD imag ing unit. T he feasibilit y o f the method w as v erif ied. T he pur po se w as to pro vide reference for size measurement by machine vision. Key word s:erro r analysis; machine visio n; CCD ; structured lig ht 在自动化进展迅速的流水线生产领域, 需要不断开发出各种自动测量装置, 然后向中心处理装置输入单件产品的各种数据。从测量技术方面看, 自动测量物件的外形尺寸和体积是该领域的难点, 在计算批量产品的仓储容量从而进行有效地包装运输以及存放时, 该技术就成为了一门关键技术。文中研究的视觉测量系统适用于非接触式以及各种图像传感的在线监测, 不但解决了流水线领域的产品尺寸在线测量, 近年来在包装印刷领域对比较精细印刷品进行监测控制方面得到了广泛的应用[1]。在诸多的视觉方法中, 结构光三维视觉还扩展了大量程、大视场、较高精度、光条图像信息的易于提取、实时性强及主动受控等特点。 CCD 电荷耦合器件于1969年在贝尔实验室研制成功以后, 由日商开始量产, 其发展过程历经30多 年。由于其具有高灵敏度、低噪声、长寿命、低功耗和高可靠性等优点, 得到了广泛应用。CCD 的几何精度高, 像素间距小, 如果配置适当的光学系统, 就可以获得很高的分辨率。结构光视觉方法的研究最早出现于20世纪70年代。为了得到产品某一方面的特征信息, 在CCD 的图像传感技术上结合结构光来得到可以更加明确的图像信息, 一定意义上改进了成像质量。 文中设计了一套基于CCD 以及结构光的机器视觉测量系统, 通过提取经CCD 成像后图像的清晰边缘, 对测量结果进行拟合, 以获得被测物边缘的准确信息; 同时