Linux与minix调度机制比较
Minix3和linux3调度机制比较
摘要
minix3和linux是两个非常不同的系统,本文将对两个系统的调度机制进行比较。minix3采用的是多级的进程队列进行调度。为了防止系统出现挂起的情况,采用动态优先级的方法。随后,文章将介绍minix3的调度算法中的一些具体实现;由于linux2.6中实现了多种的调度算法,本文选择了最常用的CFS(完全公平算法)来做介绍。最后,文章对两类算法的应用做了对比和总结。
关键字:minix3,linux,进程调度,CFS
1.Minix3的调度算法
1.1基本思想
一个多级的排队系统。有16个排队队列,但实际上可以编译定义更多或更少的队列。系统刚运行的时候一般不会使用这么多的队列,而仅使用其中几个。进程的优先级基本上由其所在队列的优先级所决定。选择进程运行的时候,调度器将从最高优先级队列中的进程开始选,如果有,则选取队首进程运行;若没有,则到下一个次优先级的队列中去选进程去执行。
1.2 CPU时间分配和防止系统挂起(hang)
进程调度中既要给与高优先级进程更多的机会去运行,但同时也要防止系统老是被一个高优先级的进程所占用,出现低优先级进程的“进程饥饿”,最后甚至造成系统挂起的问题。Minix3采用以下的方法。
首先,队列内采取时间片轮转的方法。每个进程都有一个时间片,每次时间片用完,调度器都要进行进程调度。优先级高的进程一般有较大的时间片。对于某个优先级队列中的进程而言,一个进程运行完它的时间片后就会被放到原先优先级队列的尾部并分配一个新的时间片,使得队列中的进程能轮转地公平的得到运行的机会。
其次,对于队列间,采取如下动态优先级的策略。
但如果队列中只有一个进程,那这个进程在时间片运行完后,仍会立即继续下一个时间片地运行。为了防止这种情况,但一个进程连续两个时间片地运行完后,将被放在一个较低的运行队列中。
而当进程没有妨碍其他进程的运行(即其时间片用完后,调度器调度了其他的进程运行)时,它的优先级又会不断提高直到到它能回到的(所允许的)最大优先级。这样,原先的被降低了优先级的进程在不妨碍别的进程下运行的情况下,能有机会逐步地回到原来的优先级。
1.3 Minix进程阻塞策略
如果程序阻塞后,它将由被移出调度队列。然后调度器再在调度队列中剩下的进程中选择一个程序运行。一个阻塞进程被唤醒后,得到的只是阻塞前所剩余的时间片。并将被放到原来调度队列的队首。
1.4 进程间的优先级
任务优先级>驱动程序>服务器程序>用户程序
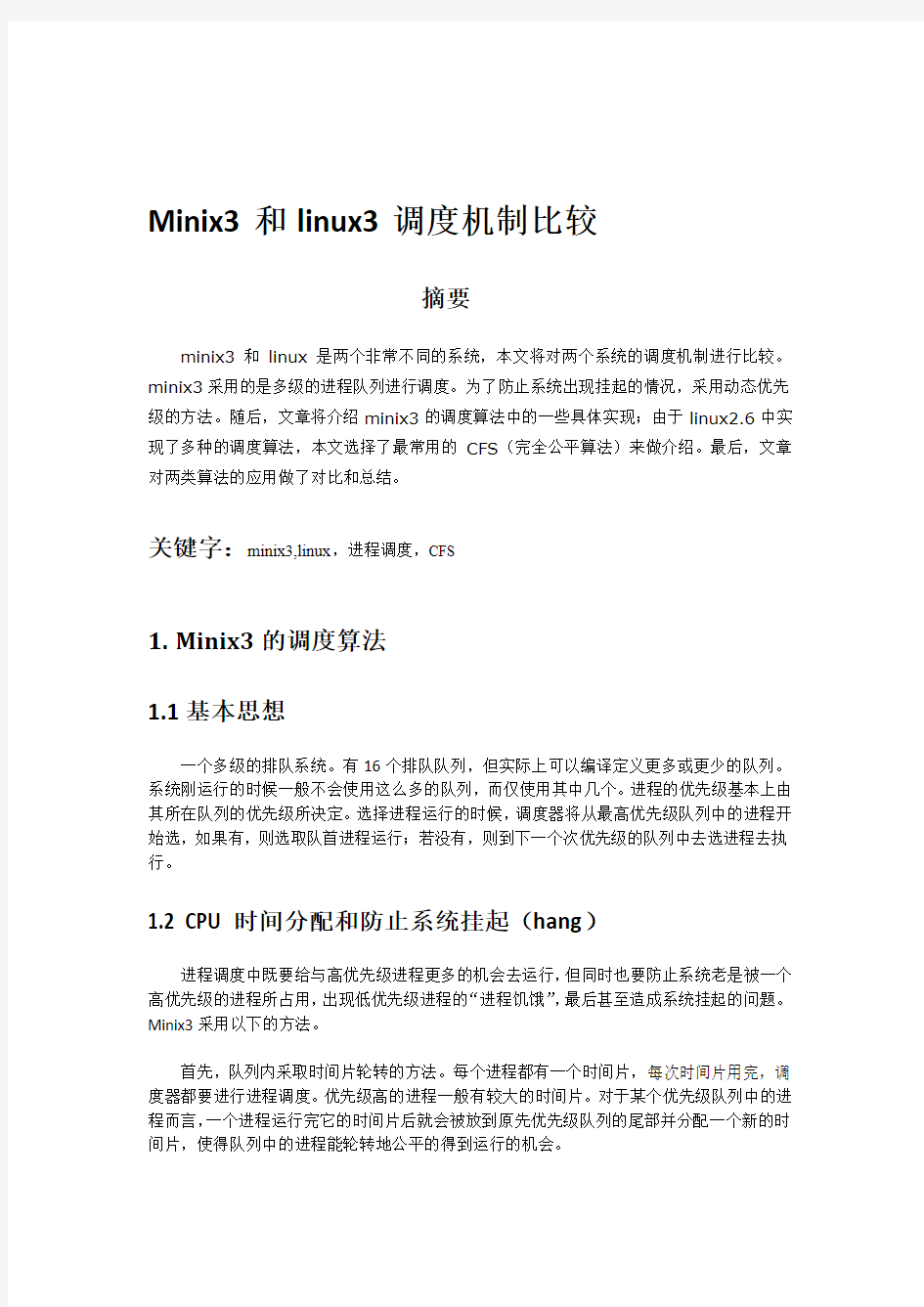
下图是minix3进程层次图。
图1
第一层的时钟和系统任务有最高优先级,驱动程序次之,服务器再次之,最后是用户程序。
1.5具体实现
相关数据结构:
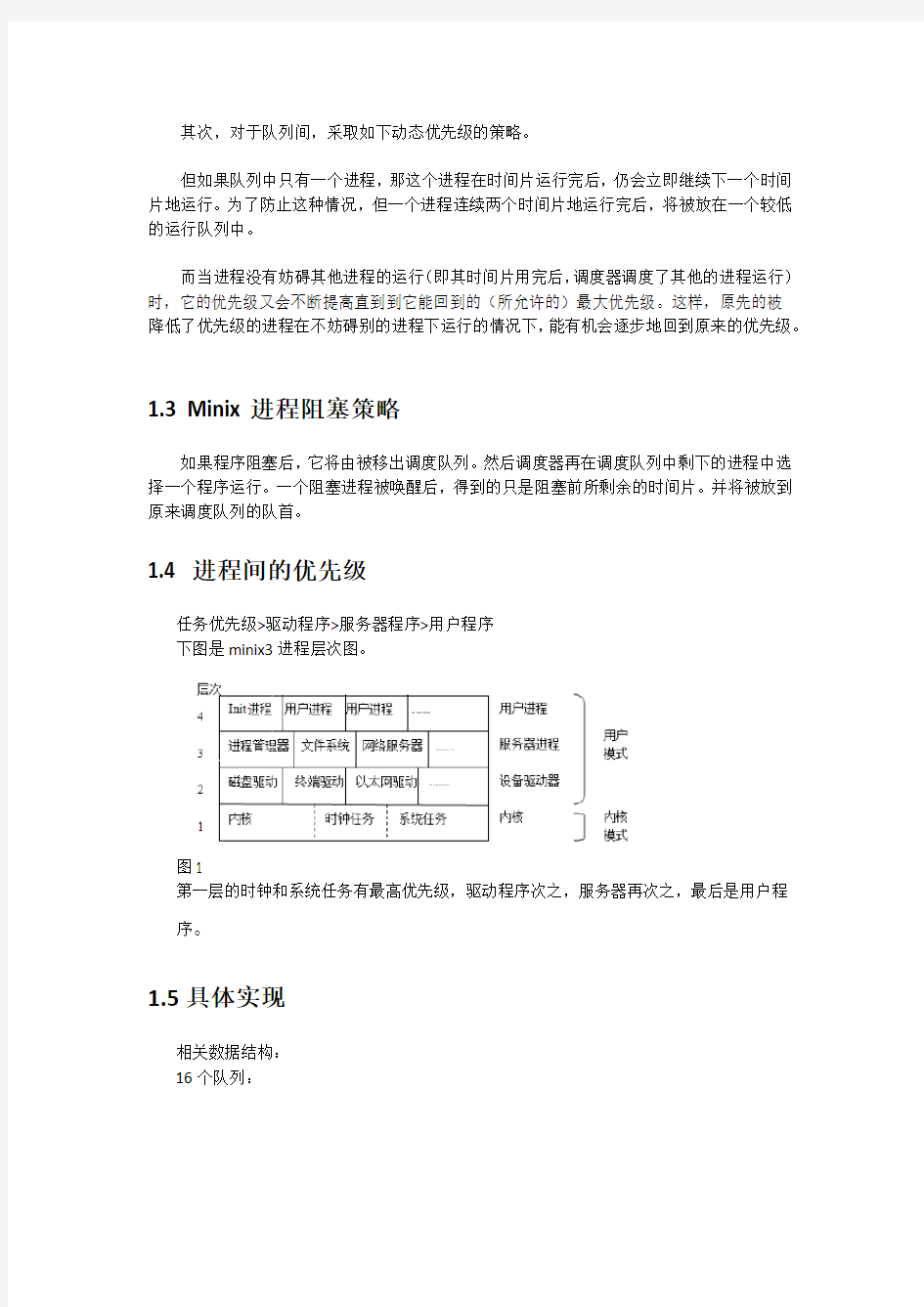
16个队列:
图2
rdy_head和rdy_tail数组中每一项对应一个队列,分别指向队列头的进程和队列尾的进程。这样可以很方便的对多级队列的头部和尾部进行操作。
相关重要函数(这些函数都在proc.h中):
sched(rp,queue,front)
该函数决定一个新就绪的进程应该放在哪个队列上,给予多大的时间片,应该放在队列头还是队列尾。
三个参数rq为代表新就绪的进程。queue表示将被放置的队列。front确定了是被放在队列头还是队列尾。在此,我仅提取几个关键的语句说明这个函数的作用。
{
……………………...
//更新进程的优先级,penalty根据前文中说到的动态优先级策略而为1或是-1。
rp->p_priority += penalty;
//由优先级而知道进程应该放在哪个调度队列上。
*queue = rp->p_priority;
//timeleft表示进程剩余时间片的大小。
//如果就绪的队列之前的时间片还没有用完,显然,其实刚被唤醒的阻塞进程,应被放到调度队列的头部。所以*front非0。
//此外,根据轮转的原则,刚用运行完的进程都应该放在调度队列的尾部。所以让*front为0。
*front = time_left;
}
pick_proc()
pick_proc负责在整个多级调度队列中找到第一个非空的队列的队首进程,将其赋值给
next_ptr即可。(操作系统将自动调用next_ptr指向的进程作为下一个运行的进程)。
enqueue(rq)
{
……………………….
sched(rp,&queue,&front);
//根据*queue和*front的结果,将进程rq插入到多级调度队列中合适的位置。
………………
//在多级队列中选中进程运行。
pick_proc();
}
dequeue(rq)
{
register int q = rp->p_priority;
………………………………………….
//在rdy_head[q]寻找rq并将其从多级调度队列中移除。
……………………………………
//如果rq是在运行态的队列。那么还要调用pick_proc()来选择下一个运行的程序pick_proc();
}
总之,当一个进程的时间片用完了,或者是被阻塞了,这时,系统就要dequeue()来向进程调度队列移除一个元素。而一个进程就绪之后,则该系统调用enqueue()将其添加到多级队列中。而当一个而进程调度队列改变后,enqueue()或dequeue()中的pick_proc()则会选择优先级最高的进程运行。
2.linux2.6的调度算法
linux系统是一个十分稳健与成熟的系统。比起minix3而言,它的系统十分复杂。linux 的调度算法也极其复杂。实际上,linux2.6中关于进程调度不仅使用了一种调度算法,而是采用了“调度算法族”的概念。进程被划为很多个优先权类(priority class),一个优先权类的进程对应一种调度算法。linux内核中的调度函数schedule()会在系统中的所有就绪进程中寻找拥有最高优先权的优先权类,再在该优先权类用相应的调度算法找到拥有最高优先权的进程,让其运行。
对于大部分的一般的进程,大部分是采用CFS(complete fair scheduler)调度算法来调度,而对于实时进程,一般是用SCHED_FIFO(先进先出调度)和SCHED_RR(循环轮转调度)。下面仅主要介绍一下CFS。
2.1虚拟运行时间
CFS中不再通过优先级而是虚拟运行时间(内核代码中用vruntime变量来表示)来决定调度的结果。CFS调度器将在进程中选择一个虚拟运行时间最少的进程来运行。
CFS不直接使用优先级而是将其用作允许任务执行的时间的衰减系数。低优先级任务具有更高的衰减系数,而高优先级任务具有较低的衰减系数。这意味着与高优先级任务相比,低优先级任务允许任务执行的时间消耗得更快——其计算出来的虚拟运行时间也越大。
CFS 背后的主要想法是维护为任务提供处理器时间方面的平衡(公平性)。分给某个任务的时间失去平衡时(意味着一个或多个任务相对于其他任务而言未被给予相当数量的时间),应给失去平衡的任务分配时间,让其执行。要实现平衡,CFS做了一些的设计:任务的虚拟运行时越小,意味着任务被允许访问服务器的时间越短—其对处理器的需求越高。则该进程就越应该运行。这样就确保了公平。保障了决不存在一个进程长期得不到运行的情况。
同时,由于计算虚拟时间时高优先级进程是占优势的——其衰减系数低,这样使其能获得更多的运行机会。
2.2 红黑树
但是与之前的Linux 调度器不同,它没有将任务维护在运行队列中,CFS 维护了一个以虚拟运行时间的大小来排序的红黑树(参见图1)。红黑树是一个树结构,具有很多有趣、有用的属性。首先,它是自平衡的,这意味着树上没有路径比任何其他路径长两倍以上。第二,树上的运行按O(log n) 时间发生(其中n是树中节点的数量)。可以在红黑树上快速高效地插入或删除任务。比起另外一个自平衡的数据结构——平衡二叉树,红黑树的开销很低。
Linux 内的所有任务都由称为task_struct的任务结构表示。该结构(以及其他相关内容)完整地描述了任务并包括了任务的当前状态、其堆栈、进程标识、优先级(静态和动态)等等。在task_struct中,有一个名为sched_entity的结构来跟踪调度信息(参见图2)。而在sched_entity中就有vruntime变量表示虚拟运行时间(图中未画出)。
系统通过vruntime的大小来排序,通过rb_node结构将所有的sched_entity排列成一个红黑树。该红黑树最左边的节点对于的task_struct就是虚拟时间运行时间最小的进程。每次进程调度的时候就是通过红黑树找到这个进程节点并让其运行。
图2. 任务和红黑树的结构层次
图3
2.3 CFS中时间片策略
CFS的时间片不是向minix3中的那样有系统创建时给一个固定长的时间片。CFS中的时间片与运行环境中并发执行的进程数和进程的衰减系数有关。其主要思想为:在一个固定长的时长,根据进程的衰减系数的差异按几何级数的比例来瓜分这个固定时间为大小不均的时间片给各个进程。比如三个进程的衰减系数为5,10,20时。若几何级数比为每5个衰减系数隔两倍的话,则它们所获得的时间片长比为8:2:1。
3 结论
我们可以看到。linux2.6的CFS调度算法和minix3的调度算法都可以防止一个进程长期得不到运行的情况。但linux2.6的算法更为公平和精密。而且CFS采用红黑树来管理进程,因为红黑树的节点的插入和删除很高效。(无需像minix3中的enqueue()和dequeue()那样要遍历整个队列进行插入和删除操作)。所以在并发运行的进程数很多时,CFS更为高效。并且,比起minix3给进程一个固定时间片的做法,CFS的时间片动态划分更为合理。即可以防止时间片太小引起的进程过度频繁地切换;又可以防止时间片太大影响系统的并行性。
当然minix3的调度算法实现简单,代码量少,调度器所占的内存少。所以,minix3调度算法更适用于并发运行的进程数少的小型系统中。
参考资料:
1.Andrew S. Tanenbaum, Albert S. Woodhull,Operating Systems Design and
Implementatio(Third Edition),电子工业出版社,2008
2.Robert Love, Linux Kernel Development(Second Edition),机械工业出版社,2006
3.Daniel P. Bovet,Marco Cesati,Understanding the Linux Kernel(Third Edition),中国电力出版社,
2001
Linux基本命令2
Linux基本命令 一、实训目的 ●掌握Linu各类命令的使用方法; ●熟悉Linx操作环境 二、实训内容 练习使用Linux常用命令,达到熟练应用的目的 三、实训步骤 子项目1.文件和目录类命令的使用 利用root用户登录到系统,进入字符界面。 1)用pwd命令查看当前所在目录。 2)用ls命令列出此目录下的文件和目录。 3)用-a选项列出此目录下包括隐藏文件在内的所有文件和目录。 4)用man命令查看ls命令的使用手册 5)在当前目录下,创建测试目录test mkdir test 6)利用ls命令列出文件和目录,确认test目录创建成功 7)进入test目录,利用pwd查看当前工作目录。cd /root/test pwd 8)利用touch命令,在当前目录创建一个新的空文件newfile。touch newfile 9)利用cp命令复制系统文件/etc/profile到当前目录下 cp /etc/profile /root/test 10)复制文件profile到一个新的文件profile.bak,作为备份 cp /etc/profile profile.bak 11)用ll命令以长格的形式列出当前目录下的所有文件,注意比较每个文件的长度和创建时 间的不同 12)用less命令分屏查看文件profile的内容,注意练习less命令的各个子命令,如b、p、q等,并对then 关键字查找。less /etc/profile 13)用grep命令在profile文件中对关键字then进行查询,并与上面的结果比较。 grep then /etc/profle 14)给文件profile创建一个软连接lnsprofile和一个硬链接lnhprofile ln -s profile lnsprofile(创建软连接) ln profile lnhprofile(创建硬链接) 15)一长格形式显示文件profile、lnsprofile和lnhprofile的详细信息。注意比较3个文件链接数的不同。
LINUX 内核的几种锁介绍
spinlock(自旋锁)、 mutex(互斥量)、 semaphore(信号量)、 critical section(临界区) 的作用与区别 Mutex是一把钥匙,一个人拿了就可进入一个房间,出来的时候把钥匙交给队列的第一个。一般的用法是用于串行化对critical section代码的访问,保证这段代码不会被并行的运行。 Semaphore是一件可以容纳N人的房间,如果人不满就可以进去,如果人满了,就要等待有人出来。对于N=1的情况,称为binary semaphore。一般的用法是,用于限制对于某一资源的同时访问。 Binary semaphore与Mutex的差异: 在有的系统中Binary semaphore与Mutex是没有差异的。在有的系统上,主要的差异是mutex一定要由获得锁的进程来释放。而semaphore可以由其它进程释放(这时的semaphore实际就是个原子的变量,大家可以加或减),因此semaphore 可以用于进程间同步。Semaphore的同步功能是所有系统都支持的,而Mutex能否由其他进程释放则未定,因此建议mutex只用于保护critical section。而semaphore则用于保护某变量,或者同步。 另一个概念是spin lock,这是一个内核态概念。spin lock与semaphore的主要区别是spin lock是busy waiting,而semaphore是sleep。对于可以sleep 的进程来说,busy waiting当然没有意义。对于单CPU的系统,busy waiting 当然更没意义(没有CPU可以释放锁)。因此,只有多CPU的内核态非进程空间,
TinyOS任务调度机制与实时调度构件设计
收稿日期:2007-05-09;修回日期:2007-07-18。 基金项目:国家863计划项目(2005AA1Z2120)。 作者简介:刘奎安(1982-),男,四川自贡人,硕士研究生,主要研究方向:无线传感器网络; 郭文生(1976-),男,辽宁铁岭人,讲师,博士研究生,主要研究方向:无线传感器网络、实时网络技术; 桑楠(1964-),男,四川营山人,教授,主要研究方向:嵌入式实时系统。 文章编号:1001-9081(2007)11-2740-03 Tiny OS 任务调度机制与实时调度构件设计 刘奎安,郭文生,桑 楠 (电子科技大学计算机科学与工程学院,成都610054) (lka10271982@sina .com ) 摘 要:Tiny OS 是一个开源的构件化操作系统,它采用构件化描述语言nes C 进行开发,主要针对资源非常有限的无线传感器网络节点而设计。分析了Tiny OS 22.x 的任务调度机制,针对其在实时应用领域的调度缺陷,设计并实现了一种软实时任务调度构件。根据构件在T OSSI M 仿真器中的验证分析,能有效增强Tiny OS 的实时性能。 关键词:无线传感器;Tiny OS;实时;构件设计;T OSSI M 中图分类号:TP316;TP311 文献标识码:A Schedule m echan is m of T i n yO S and its rea l 2ti m e schedule co m ponen t desi gn L I U Kui 2an,G UO W en 2sheng,S ANG Nan (School of Co m puter Science and Engineering,U niversity of Electronic Science and Technology of China, Chengdu S ichuan 610054,China ) Abstract:Tiny OS is an open 2s ource component operating syste m for sens or net w orks nodes that has very li m ited res ources .Tiny OS was i m p le mented in component 2devel op ing language nes C .Thr ough analyzing the schedule mechanis m of Tiny OS 22.x,a s oft real 2ti m e scheduler componentwas designed and i m p le mented for real 2ti m e app licati ons .Si m ulati on results in T OSSI M demonstrate that the s oft real 2ti m e component i m p r oves the real 2ti m e perfor mance of Tiny OS . Key words:wireless sens or net w orks;Tiny OS;real 2ti m e;component design;T OSSI M 0 引言 无线传感器网络(W ireless Sens or Net w orks,W S N )是由大量体积较小、能源受限,具有一定计算、存储和无线通信能力的传感器节点组成的无结构网络[1,2]。它综合了传感器、嵌入式、无线网络、分布式信息处理等技术。由于W S N 自身具备的特征,已广泛应用于国防军事、环境监测、交通管理、医疗卫生等领域。无线传感器网络作为一个新兴的研究领域,其中存在大量挑战性的研究课题,节点上的操作系统(W ireless Sens or Net w orks Operati on Syste m,W S NOS )设计与实现就是其 中之一。 目前,国外许多大学、研究机构着手于W S NOS 的研究,开发出了Tiny OS [3]、Magnet 、MANTI S 、Sen OS 等具有典型特征的W S NOS 。其中,由UC Berkeley 依靠S martdust (智能尘埃)项目开发出的Tiny OS 得到了广泛关注和应用。 Tiny OS 是全新面向W S N 的源码级构件化操作系统,由 构件开发语言nes C [4]开发,其内核只需要400字节的内存空间即可运行起来,是一个轻量级操作系统。但在实时应用中, Tiny OS 简单的F I F O 调度算法就显得不再适用,在任务数较 多时重要任务的响应时间无法得到保证。因此,针对实时应用的实时性需求,本文深入分析了Tiny OS 22.x 调度机制和调度相关的构件,提出了具有软实时性能的任务调度机制,开发 了相应的系统调度构件,通过在T OSSI M [5]仿真器中进行仿 真分析,此实时系统调度构件能提高Tiny OS 的实时性能。 1 Tiny OS 22.x 的调度机制 1.1 Tiny OS 的任务事件驱动的并发模型 Tiny OS 采用任务和事件驱动[6] 相结合的两级并发模型 (如图1) 。 图1 Tiny OS 任务事件驱动并发模型示意图 任务机制 任务由用户应用程序定义,可以由应用程序或事件处理程序创建。任务由task 关键字定义,具体定义语 法为:task void myTask (){…}。任务由post 关键字创建,具体语法为:post myTask ()。创建任务时,Tiny OS 的调度器将任务加入任务队列的队尾。核心调度策略中的任务调度器把此任务加入任务队列后就立即返回,任务则延迟执行。在等待执行的任务队列中,各个任务之间采用F I F O 原则进行调 第27卷第11期 2007年11月 计算机应用 Computer App licati ons Vol .27No .11 Nov .2007
【IT专家】linux多线程及信号处理
本文由我司收集整编,推荐下载,如有疑问,请与我司联系 linux多线程及信号处理 linux多线程及信号处理Linux 多线程应用中如何编写安全的信号处理函数hi.baidu/yelangdefendou/blog/item/827984efd3af7cd9b21cb1df.html Signal Handling Use reentrant functions for safer signal handling linux信号种类1、可靠信号和不可靠信号“不可靠信号” Linux信号机制基本上是从Unix系统中继承过来的。早期Unix系统中的信号机制比较简单和原始,后来在实践中暴露出一些问题,因此,把那些建立在早期机制上的信号叫做”不可靠信号”,信号值小于SIGRTMIN(Red hat 7.2中,SIGRTMIN=32,SIGRTMAX=63)的信号都是不可靠信号。这就是”不可靠信号”的来源。他的主要问题是:? 进程每次处理信号后,就将对信号的响应配置为默认动作。在某些情况下,将导致对信号的错误处理;因此,用户假如不希望这样的操作,那么就要在信号处理函数结尾再一次调用signal(),重新安装该信号。? 信号可能丢失,后面将对此周详阐述。因此,早期unix下的不可靠信号主要指的是进程可能对信号做出错误的反应连同信号可能丢失。Linux支持不可靠信号,但是对不可靠信号机制做了改进:在调用完信号处理函数后,不必重新调用该信号的安装函数(信号安装函数是在可靠机制上的实现)。因此,Linux下的不可靠信号问题主要指的是信号可能丢失。“可靠信号” 随着时间的发展,实践证实了有必要对信号的原始机制加以改进和扩充。因此,后来出现的各种Unix版本分别在这方面进行了研究,力图实现”可靠信号”。由于原来定义的信号已有许多应用,不好再做改变,最终只好又新增加了一些信号,并在一开始就把他们定义为可靠信号,这些信号支持排队,不会丢失。同时,信号的发送和安装也出现了新版本:信号发送函数sigqueue()及信号安装函数sigaction()。POSIX.4对可靠信号机制做了标准化。但是,POSIX只对可靠信号机制应具备的功能连同信号机制的对外接口做了标准化,对信号机制的实现没有作具体的规定。信号值位于SIGRTMIN和SIGRTMAX之间的信号都是可靠信号,可靠信号克服了信号可能丢失的问题。Linux在支持新版本的信号安装函数sigation()连同信号发送函数sigqueue()的同时,仍然支持早期的signal()信号安装函数,支持信号发送函数kill()。注:不
linux常用操作命令.doc
1 linux常用操作命令 linux系统中通过命令来提高自己的操作能力,下面由小编为大家整理了linux常用操作命令的相关知识,希望大家喜欢! linux常用操作命令一、常用指令 ls 显示文件或目录 -l 列出文件详细信息l(list) -a 列出当前目录下所有文件及目录,包括隐藏的a(all) mkdir 创建目录 -p 创建目录,若无父目录,则创建p(parent) cd 切换目录 touch 创建空文件 2 echo 创建带有内容的文件。
cat 查看文件内容 cp 拷贝 mv 移动或重命名 rm 删除文件 -r 递归删除,可删除子目录及文件 -f 强制删除 find 在文件系统中搜索某文件 wc 统计文本中行数、字数、字符数 grep 在文本文件中查找某个字符串rmdir 删除空目录 3 tree 树形结构显示目录,需要安装tree包
pwd 显示当前目录 ln 创建链接文件 more、less 分页显示文本文件内容head、tail 显示文件头、尾内容 ctrl+alt+F1 命令行全屏模式 linux常用操作命令二、系统管理命令 stat 显示指定文件的详细信息,比ls更详细who 显示在线登陆用户 whoami 显示当前操作用户 hostname 显示主机名 4 uname 显示系统信息
top 动态显示当前耗费资源最多进程信息 ps 显示瞬间进程状态ps -aux du 查看目录大小du -h /home带有单位显示目录信息 df 查看磁盘大小df -h 带有单位显示磁盘信息 ifconfig 查看网络情况 ping 测试网络连通 netstat 显示网络状态信息 man 命令不会用了,找男人如:man ls clear 清屏 alias 对命令重命名如:alias showmeit="ps -aux" ,另外解除使用unaliax showmeit 5 kill 杀死进程,可以先用ps 或top命令查看进程的id,然
Linux 进程管理实验
Linux 进程管理实验 一、实验内容: 1. 利用bochs观测linux0.11下的PCB进程控制结构。 2. 利用bochs观测linux0.11下的fork.c源代码文件,简单分析其中的重要函数。 3. 在fork.c适当位置添加代码,以验证fork函数的工作原理。 二、Linux进程管理机制分析 Linux有两类进程:一类是普通用户进程,一类是系统进程,它既可以在用户空间运行,又可以通过系统调用进入内核空间,并在内核空间运行;另一类叫做内核进程,这种进程只能在内核空间运行。在以i386为平台的Linux系统中,进程由进程控制块,系统堆栈,用户堆栈,程序代码及数据段组成。Linux系统中的每一个用户进程有两个堆栈:一个叫做用户堆栈,它是进程运行在用户空间时使用的堆栈;另一个叫做系统堆栈,它是用户进程运行在系统空间时使用的堆栈。 1.Linux进程的状态: Linux进程用进程控制块的state域记录了进程的当前状态,一个Linux 进程在它的生存期中,可以有下面6种状态。 1.就绪状态(TASK_RUNNING):在此状态下,进程已挂入就绪队列,进入准备运行状态。 2.运行状态(TASK_RUNNING):当进程正在运行时,它的state域中的值不改变。但是Linux会用一个专门指针(current)指向当前运行的
任务。 3.可中断等待状态(TASK_INTERRUPTIBLE):进程由于未获得它所申请的资源而处在等待状态。不管是资源有效或者中断唤醒信号都能使等待的进程脱离等待而进入就绪状态。即”浅睡眠状态”。 4.不可中断等待状态(TASK_UNINTERRUPTIBLE):这个等待状态与上面等待状态的区别在于只有当它申请的资源有效时才能被唤醒,而其它信号不能。即“深睡眠状态”。 5.停止状态(TASK_STOPPED):当进程收到一个SIGSTOP信号后就由运行状态进入停止状态,当收到一个SINCONT信号时,又会恢复运行状态。挂起状态。 6.终止状态(TASK_ZOMBIE):进程因某种原因终止运行,但进程控制块尚未注销。即“僵死状态”。 状态图如下所示: 2.Linux进程控制块:
tinyos任务调度机制
TOSH_sched_init();for(;;){TOSH_run_task();} 这两个函数的实现在tinyos-1.x\tos\system目录下的sched.c源文件中。这个文件就实现了tinyos 1.x的调度策略,很简单吧?闲话少说,下面分析它的数据结构。 typedef struct { void (*tp) (); } TOSH_sched_entry_T; 这个结构体就是tinyos任务队列里的东东,里面是个函数指针。 enum { #ifdef TOSH_MAX_TASKS_LOG2 #if TOSH_MAX_TASKS_LOG2 > 8 #error "Maximum of 256 tasks, TOSH_MAX_TASKS_LOG2 must be <= 8" #endif TOSH_MAX_TASKS = 1 << TOSH_MAX_TASKS_LOG2, #else TOSH_MAX_TASKS = 8, #endif TOSH_TASK_BITMASK = (TOSH_MAX_TASKS - 1) }; 上面定义了tinyos任务队列里的最大任务数TOSH_MAX_TASKS,和一个掩码。 //定义tinyos任务队列,这个队列是个循环队列! volatile TOSH_sched_entry_T TOSH_queue[TOSH_MAX_TASKS]; //“头指针”tinyos任务队列里的第一个不为空的任务的下标 uint8_t TOSH_sched_full; //“尾指针”如果tinyos任务队列没有满,则是最后一个不为空的任务 //的下一个元素的下标;如果任务队列满则是最后一个任务的下标。 volatile uint8_t TOSH_sched_free; 好了,数据结构分析完了,咱们看看tinyos是怎样实现这个队列的吧,实现一个队列,无非就是初始化,增加队列元素,删除队列元素,判断队列是否为空……,数据结构里最基本的东东,想必大家比我清楚了!(如果这个不清楚,赶紧回去看看数据结构 ^_^ )。 一初始化 s 初始化函数很简单,大家肯定都会写了。 void TOSH_sched_init(void) { int i; TOSH_sched_free = 0; TOSH_sched_full = 0; for (i = 0; i < TOSH_MAX_TASKS; i++) TOSH_queue[i].tp = NULL;
linux signal()函数
当服务器close一个连接时,若client端接着发数据。根据TCP协议的规定,会收到一个RST响应,client再往这个服务器发送数据时,系统会发出一个SIGPIPE信号给进程,告诉进程这个连接已经断开了,不要再写了。根据信号的默认处理规则SIGPIPE信号的默认执行动作是terminate(终止、退出), 所以client会退出。 若不想客户端退出可以把SIGPIPE设为SIG_IGN 如: signal(SIGPIPE,SIG_IGN); 这时SIGPIPE交给了系统处理。 服务器采用了fork的话,要收集垃圾进程,防止僵死进程的产生,可以这样处理: signal(SIGCHLD,SIG_IGN);交给系统init去回收。 这里子进程就不会产生僵死进程了。 signal(SIGHUP, SIG_IGN); signal信号函数,第一个参数表示需要处理的信号值(SIGHUP),第二个参数为处理函数或者是一个表示,这里,SIG_IGN表示忽略SIGHUP那个注册的信号。 SIGHUP和控制台操作有关,当控制台被关闭时系统会向拥有控制台sessionID的所有进程发送HUP信号,默认HUP信号的action是exit,如果远程登陆启动某个服务进程并在程序运行时关闭连接的话会导致服务进程退出,所以一般服务进程都会用nohup工具启动或写成一个daemon。 unix中进程组织结构为session 包含一个前台进程组及一个或多个后台进程组,一个进程组包含多个进程。 一个session可能会有一个session首进程,而一个session首进程可能会有一个控制终端。 一个进程组可能会有一个进程组首进程。进程组首进程的进程ID与该进程组ID相等。 这儿是可能会有,在一定情况之下是没有的。 与终端交互的进程是前台进程,否则便是后台进程 SIGHUP会在以下3种情况下被发送给相应的进程: 1、终端关闭时,该信号被发送到session首进程以及作为job提交的进程(即用&符号提交的进程)
linux常用命令
新手刚刚接触Linux的时候可能处处感到不便,不过没有关系,接触新的事物都有这样的一个过程,在你用过Linux一段时间后,你就会逐渐了解Linux其实和Windows一样容易掌握。 由于操作和使用环境的陌生,如果要完全熟悉Linux的应用我们首先要解决的问题就是对Linux常用命令的熟练掌握。本章我们就来介绍Linux的常用基本命令。 Linux常用命令 1.Linux命令基础 Linux区分大小写。在命令行(shell)中,可以使用TAB键来自动补全命令。即可以输入命令的前几个字母,然后按TAB键,系统自动补全命令,若不止一个,则显示出所有和输入字母相匹配的命令。 按TAB键时,如果系统只找到一个和输入相匹配的目录或文件,则自动补全;若没有匹配的内容或有多个相匹配的名字,系统将发出警鸣声,再按一下TAB键将列出所有相匹配的内容(如果有的话)以供用户选择。 首先启动Linux。启动完毕后需要进行用户的登录,选择登陆的用户不同自然权限也不一样,其中―系统管理员‖拥有最高权限。 在启动Linux后屏幕出现如下界面显示:Red Hat Linux release 9 (Shrike) Kernel 2.4.20.8 on an i686
login: 输入:root(管理员名)后,计算机显示输口令(password:),输入你的口令即可。当计算机出现一个―#‖提示符时,表明你登录成功! 屏幕显示Linux提示符:[root@localhost root]#_ 这里需要说明的是―Red Hat Linux release 9 (Shrike)‖表示当前使用的操作系统的名称及版本。―2.4.20.8‖表示Linux操作系统的核心版本编号。―i686‖表示该台电脑使用的CPU的等级。 下面我们来介绍常用基本命令 一,注销,关机,重启 注销系统的logout命令 1,Logout 注销是登陆的相对操作,登陆系统后,若要离开系统,用户只要直接下达logout命令即可: [root@localhost root]#logout
linux进程管理篇
目录:(内容较多,加个目录) |-进程管理 进程常用命令 |- w查看当前系统信息 |- ps进程查看命令 |- kill终止进程 |- 一个存放内存中的特殊目录/proc |- 进程的优先级 |- 进程的挂起与恢复 |- 通过top命令查看进程 计划任务 |- 计划任务的重要性 |- 一次性计划at和batch |- 周期性计划crontab 进程管理的概念 进程和程序区别 1.程序是静态概念,本身作为一种软件资源长期保存;而进程是程序的执行过程,它是动态概念,有一定的生命期,是动态产生和消亡的。 2.程序和进程无一一对应关系。一个程序可以由多个时程公用;另一一方面,一个进程在活动中有可顺序地执行若干个程序 父子进程的关系 1.子进程是由一个进程所产生的进程,产生这个子进程的进程称为父进程 2.在linux系统中,使用系统调用fork创建进程。fork复制的内容包括父进程的数据和堆栈段以及父进程的进程环境。 3.父进程终止子进程自然终止。 前台进程和后台进程 前台进程 在shell提示处理打入命令后,创建一个子进程,运行命令,Shell等待命令退出,然后返回到对用户给出提示符。这条命令与Shell异步运行,即在前台运行,用户在它完成之前不能执行别一个命令
很简单,我们在执行这个查找命令时,无法进行其它操作,这个查找就属于前台进程 后台进程 在Shell提示处打入命令,若后随一个&,Shell创建子进程运行此命令,但不等待命令退出,而直接返回到对用户给出提示。这条命令与Shell同步运行,即在后台运行。“后台进程必须是非交互式的” 再来看这个命令就变成了后台进程,我们用同样的条件进行查找,把查找记过放到hzh/test/init.find这个文件中。不影响我们前台其它的操作。 进程的状态
Linux中直接IO机制的介绍
Linux 中直接 I/O 机制的介绍https://www.360docs.net/doc/2d3346073.html,/developerworks/cn/linux/l-cn-...
https://www.360docs.net/doc/2d3346073.html,/developerworks/cn/linux/l-cn-...
当应用程序需要直接访问文件而不经过操作系统页高速缓冲存储器的时候,它打开文件的时候需要指定 O_DIRECT 标识符。 操作系统内核中处理 open() 系统调用的内核函数是 sys_open(),sys_open() 会调用 do_sys_open() 去处理主要的打开操作。它主要做了三件事情:首先,它调用 getname() 从进程地址空间中读取文件的路径名;接着,do_sys_open() 调用 get_unused_fd() 从进程的文件表中找到一个空闲的文件表指针,相应的新文件描述符就存放在本地变量 fd 中;之后,函数 do_?lp_open() 会根据传入的参数去执行相应的打开操作。清单 1 列出了操作系统内核中处理 open() 系统调用的一个主要函数关系图。 清单 1. 主要调用函数关系图 sys_open() |-----do_sys_open() |---------getname() |---------get_unused_fd() |---------do_filp_open() |--------nameidata_to_filp() |----------__dentry_open() 函数 do_?ip_open() 在执行的过程中会调用函数 nameidata_to_?lp(),而 nameidata_to_?lp() 最终会调用 __dentry_open()函数,若进程指定了 O_DIRECT 标识符,则该函数会检查直接 I./O 操作是否可以作用于该文件。清单 2 列出了 __dentry_open()函数中与直接 I/O 操作相关的代码。 清单 2. 函数 dentry_open() 中与直接 I/O 相关的代码 if (f->f_flags & O_DIRECT) { if (!f->f_mapping->a_ops || ((!f->f_mapping->a_ops->direct_IO) && (!f->f_mapping->a_ops->get_xip_page))) { fput(f); f = ERR_PTR(-EINVAL); } } 当文件打开时指定了 O_DIRECT 标识符,那么操作系统就会知道接下来对文件的读或者写操作都是要使用直接 I/O 方式的。 下边我们来看一下当进程通过 read() 系统调用读取一个已经设置了 O_DIRECT 标识符的文件的时候,系统都做了哪些处理。函数read() 的原型如下所示: ssize_t read(int feledes, void *buff, size_t nbytes) ; 操作系统中处理 read() 函数的入口函数是 sys_read(),其主要的调用函数关系图如下清单 3 所示: 清单 3. 主调用函数关系图 sys_read() |-----vfs_read() |----generic_file_read() |----generic_file_aio_read() |--------- generic_file_direct_IO()
Quartz任务调度--详细教程
Quartz任务调度快速入门1 概述 各种企业应用几乎都会碰到任务调度的需求,就拿论坛来说:每隔半个小时生成精华文章的RSS文件,每天凌晨统计论坛用户的积分排名,每隔30分钟执行锁定用户解锁任务。 对于一个典型的MIS系统来说,在每月1号凌晨统计上个月各部门的业务数据生成月报表,每半个小时查询用户是否已经有快到期的待处理业务……,这样的例子俯拾皆是,不胜枚举。 任务调度本身涉及到多线程并发、运行时间规则制定和解析、场景保持与恢复、线程池维护等诸多方面的工作。如果直接使用自定义线程这种刀耕火种的原始办法,开发任务调度程序是一项颇具挑战性的工作。Java开源的好处就是:领域问题都能找到现成的解决方案。 OpenSymphony所提供的Quartz自2001年发布版本以来已经被众多项目作为任务调度的解决方案,Quartz在提供巨大灵活性的同时并未牺牲其简单性,它所提供的强大功能使你可以应付绝大多数的调度需求。 Quartz 在开源任务调度框架中的翘首,它提供了强大任务调度机制,难能可贵的是它同时保持了使用的简单性。Quartz 允许开发人员灵活地定义触发器的调度时间表,并可以对触发器和任务进行关联映射。 此外,Quartz提供了调度运行环境的持久化机制,可以保存并恢复调度现场,即使系统因故障关闭,任务调度现场数据并不会丢失。此外,Quartz还提供了组件式的侦听器、各种插件、线程池等功能。 了解Quartz体系结构 Quartz对任务调度的领域问题进行了高度的抽象,提出了调度器、任务和触发器这3个核心的概念,并在org.quartz通过接口和类对重要的这些核心概念进行描述: ●Job:是一个接口,只有一个方法void execute(JobExecutionContext context),开发者实现该接口定义运行任务,JobExecutionContext类提供了调度上下文的各种信息。Job运行时的信息保存在 JobDataMap实例中; ●JobDetail:Quartz在每次执行Job时,都重新创建一个Job实例,所以它不直接接受一个Job的实例,相反它接收一个Job实现类,以便运行时通过newInstance()的反射机制实例化Job。因此需要通过一个类来描述Job的实现类及其它相关的静态信息,如Job名字、描述、关联监听器等信息,JobDetail 承担了这一角色。
Linux常用命令
(1)基于虚拟机的Linux操作系统的使用 1.启动VMware Workstation应用程序,启动Windows以后,选择开始—程序——VMware—VMware Workstation,出现如图7—1所示窗口。 2.选择File—Open选择安装好的Linux虚拟机文件,或者直接单击Start this virtual machine 启动Linux操作系统。 3.启动系统后需要输入用户名和密码,如图7—2所示,用户名为“root”,密码为“jsjxy308”。 4.启动终端,成功进入系统后,选择“应用程序”—“系统工具”—“终端”。 5.在终端中执行Linux 命令,终端运行以后,就可以在这里输入Linux命令,并按回车键执行。 (2)文件与目录相关命令的使用 1.查询/bin目录,看一看有哪些常用的命令文件在该目录下: ll /bin 2.进入/tmp目录下,新建目录myshare: cd /tmp mkdir myshare ls –ld myshare/ 3.用pwd命令查看当前所在的目录: pwd 4.新建testfile文件: touch testfile ls -l 5.设置该文件的权限模式: chomd 755 testfile ls -l testfile 6.把该文件备份到/tmp/myshare目录下,并改名为testfile.bak: cp testfile myshare/testfile.bak ls -l myshare/ 7.在/root目录下为该文件创建1个符号连接: ln -s /tmp/testfile /root/testfile.ln ls -l /root/testfile.ln 8.搜索inittab 文件中含有initdefault字符串的行: cat /etc/inittab | grep initdefault (3)磁盘管理与维护命令的使用 1)Linux 下使用光盘步骤 1.确认光驱对应的设备文件: ll /dev/cdrom 2.挂载光盘: mout -t iso9600/dev/cdrom test/dir 1.查询挂载后的目录: ll /media/cdrom 2.卸载光盘: umount /dev/cdrom 2)Linux下USB设备的使用
linux进程管理(一)
进程介绍 程序和进程 程序是为了完成某种任务而设计的软件,比如OpenOffice是程序。什么是进程呢?进程就是运行中的程序。 一个运行着的程序,可能有多个进程。比如自学it网所用的WWW服务器是apache服务器,当管理员启动服务后,可能会有好多人来访问,也就是说许多用户来同时请求httpd服务,apache服务器将会创建有多个httpd进程来对其进行服务。 进程分类 进程一般分为交互进程、批处理进程和守护进程三类。 值得一提的是守护进程总是活跃的,一般是后台运行,守护进程一般是由系统在开机时通过脚本自动激活启动或超级管理用户root来启动。比如在 Redhat中,我们可以定义httpd 服务器的启动脚本的运行级别,此文件位于/etc/init.d目录下,文件名是httpd,/etc/init.d/httpd 就是httpd服务器的守护程序,当把它的运行级别设置为3和5时,当系统启动时,它会跟着启动。 [root@localhost ~]# chkconfig --level 35 httpd on 进程的属性: 进程ID(PID):是唯一的数值,用来区分进程; 父进程和父进程的ID(PPID); 启动进程的用户ID(UID)和所归属的组(GID); 进程状态:状态分为运行R、休眠S、僵尸Z; 进程执行的优先级; 进程所连接的终端名; 进程资源占用:比如占用资源大小(内存、CPU占用量); 父进程和子进程: 他们的关系是管理和被管理的关系,当父进程终止时,子进程也随之而终止。但子进程终止,父进程并不一定终止。比如httpd服务器运行时,我们可以杀掉其子进程,父进程并不会因为子进程的终止而终止。 在进程管理中,当我们发现占用资源过多,或无法控制的进程时,应该杀死它,以保护系统的稳定安全运行; 进程管理
实验四 Linux进程互斥
实验四 Linux进程互斥 一、实验目的 熟悉Linux下信号量机制,能够使用信号量实现在并发进程间的互斥和同步。 二、实验题目 使用共享存储区机制,使多个并发进程分别模拟生产者-消费者模式同步关系、临界资源的互斥访问关系,使用信号量机制实现相应的同步和互斥。 三、背景材料 (一)需要用到的系统调用 实验可能需要用到的主要系统调用和库函数在下面列出,详细的使用方法说明通过“man 2 系统调用名”或者“man 3 函数名”命令获取。 fork() 创建一个子进程,通过返回值区分是在父进程还是子进程中执行; wait() 等待子进程执行完成; shmget() 建立一个共享存储区; shmctl() 操纵一个共享存储区; s hmat() 把一个共享存储区附接到进程内存空间; shmdt() 把一个已经附接的共享存储区从进程内存空间断开; semget() 建立一个信号量集; semctl() 操纵一个信号量集,包括赋初值; semop() 对信号量集进行wait和signal操作; signal() 设置对信号的处理方式或处理过程。 (二)模拟生产者-消费者的示例程序 本示例主要体现进程间的直接制约关系,由于使用共享存储区,也存在间接制约关系。进程分为服务进程和客户进程,服务进程只有一个,作为消费者,在每次客户进程改变共享存储区内容时显示其数值。各客户进程作为生产者,如果共享存储区内容已经显示(被消费),可以接收用户从键盘输入的整数,放在共享存储区。 编译后执行,第一个进程实例将作为服务进程,提示: ACT CONSUMER!!! To end, try Ctrl+C or use kill. 服务进程一直循环执行,直到用户按Ctrl+C终止执行,或使用kill命令杀死服务进程。 其他进程实例作为客户进程,提示: Act as producer. To end, input 0 when prompted. 客户进程一直循环执行,直到用户输入0。 示例程序代码如下: #include
任务调度机制
ucos:uc/os 任务调度机制 疯狂代码 https://www.360docs.net/doc/2d3346073.html,/ ?: http:/https://www.360docs.net/doc/2d3346073.html,/NetworkProgramming/Article33556.html uc/os 任务调度机制 by zhang9733 from https://www.360docs.net/doc/2d3346073.html,/gd/dzbbs/ 内核核心任务是任务调度机制为了对uc/os进行分析我们从任务调度开始在uc/os中个任务通常是个无限循环具有如下结构后面我将解释为什么会有这种结构从下面结构可以看出个任务就像其他c样;而且既然任务是个无限循环我们可以想象到它定不会返回任何数据所以返回类型应该定义为void : ------------------------------------------------------------ void mytask(void *pdata) { for (;;) { do something; waiting; do something; } } uc/os可以管理64个任务但目前版本系统占用了两个任务还保留了其他六个任务故用户可以使用56个任务每个任务必须赋予定优先级优先级数越高优先级越低所以0级优先级任务有最高优先级通过在os_cfg.h文件中定义宏os_lowest_prio可以决定系统任务个数系统目前占用两个任务为空闲任务idle task和统计任务stat task当没有其他任务进入就绪状态时空闲任务投入运行空闲任务什么也不做只是简单将计数器加1这个计数器可以用来统计cpu利用率 uc/os下每个任务可以有如下五种状态 休眠态(dormant):指任务驻留在空间中还没有交给内核管理把任务交给内核是通过ostaskcreate( )或ostaskcreatext( )实现 就绪(ready):当任务旦建立这个任务就处于就绪态准备运行任务可以动态被另个建立也可以在系统运行开始之前建立通过ostaskdel( )使任务返回到休眠态就绪态任务都放在就绪列表中在任务调度时指针ostcbhighrdy指向优先级最高就绪任务也就是立刻就要运行任务 运行(running):准备就绪最高优先级任务获得cpu控制权从而处于运行态指针ostcbcur指向正在运行任务
Linux进程管理-实验报告
(1) 加深对进程概念的理解,明确进程和程序的区别。 (2) 进一步认识并发执行的实质。 (3) 学习通过进程执行新的U 标程序的方法。 (4) 了解Linux 系统中进程信号处理的基本原理。 Red Hat Linux (1)进程的创建 编写一段程序,使用系统调用fork ()创建两个子进程,当此进程运 行时,在系统中有一个父进程和两个子进程活动,让每一个进程在 屏幕上显示一个字符,父进程显示字符“a” ;子进程分别显示字符 “b”和字符“c” ,试观察记录屏幕上的显示结果,并分析原因。 程序代码: # include
linux通讯
线程+定时实现linux下的Qt串口编程 2010-06-26 10:49 转: 线程+定时实现linux下的Qt串口编程 作者:lizzy115 时间:2010,5,14 说明:本设计采用的是线程+定时实现linux下的Qt串口编程,而非网上资料非常多的Qt编写串口通信程序全程图文讲解系列,因为Qt编写串口通信程序全程图文讲解系列是很好实现,那只是在windows下面的,可是在linux 下面实现串口的通信并非如此,原因在于QextSerialBase::EventDriven跟QextSerialBase::Polling这两个事件的区别,EventDriven属于异步,Polling 属于同步,在windows下面使用的是EventDriven很容易实现,只要有数据就会触发一个串口事件,网上说linux下面需要的是Polling,可是还是不行的,只要串口有数据的时候他会在QByteArray temp = myCom->readAll(); 这句一直读取数据,没能退出,直到断掉串口的时候才能把接受到的串口数据通过 ui->textBrowser->insertPlainText(temp);打印在界面上,一直没能解决这个问题,所以只好采用线程+定时实现linux下的Qt串口编程进行设计。 一、安装环境: 系统平台:Ubuntu-8.04,内核2.6.24-27-generic,图形界面 二、软件需求及下地地址: Qt版本 qt-linux-SDK-4.6.2 注意:此处使用的是qt-linux-SDK-4.6.2版本,编译通过了,之后需要把他移植到qt-embedded-linux-opensource-src-4.5.3.tar.gz,通过qte编译后移植到开发板中,采用的测试开发板为Micro2440, 下载地址:略 三、程序编写过程 程序编程流程: 先新建一个工程空白工程,再建立Ui文件,通过designer进行Ui 界面设计,设计完保存,编译生成ui_mainwindow.h头文件,编写线程头文件及线程处理.cpp文件,建立串口处理头文件及 .cpp文件,最后完成main.cpp 文件。