使用OptiFDTD设计微型环状共振器
OptiFDTD4.0 计 环状
计Micro Ring Resonator Layout图
1 OptiFDTD_Designer Project
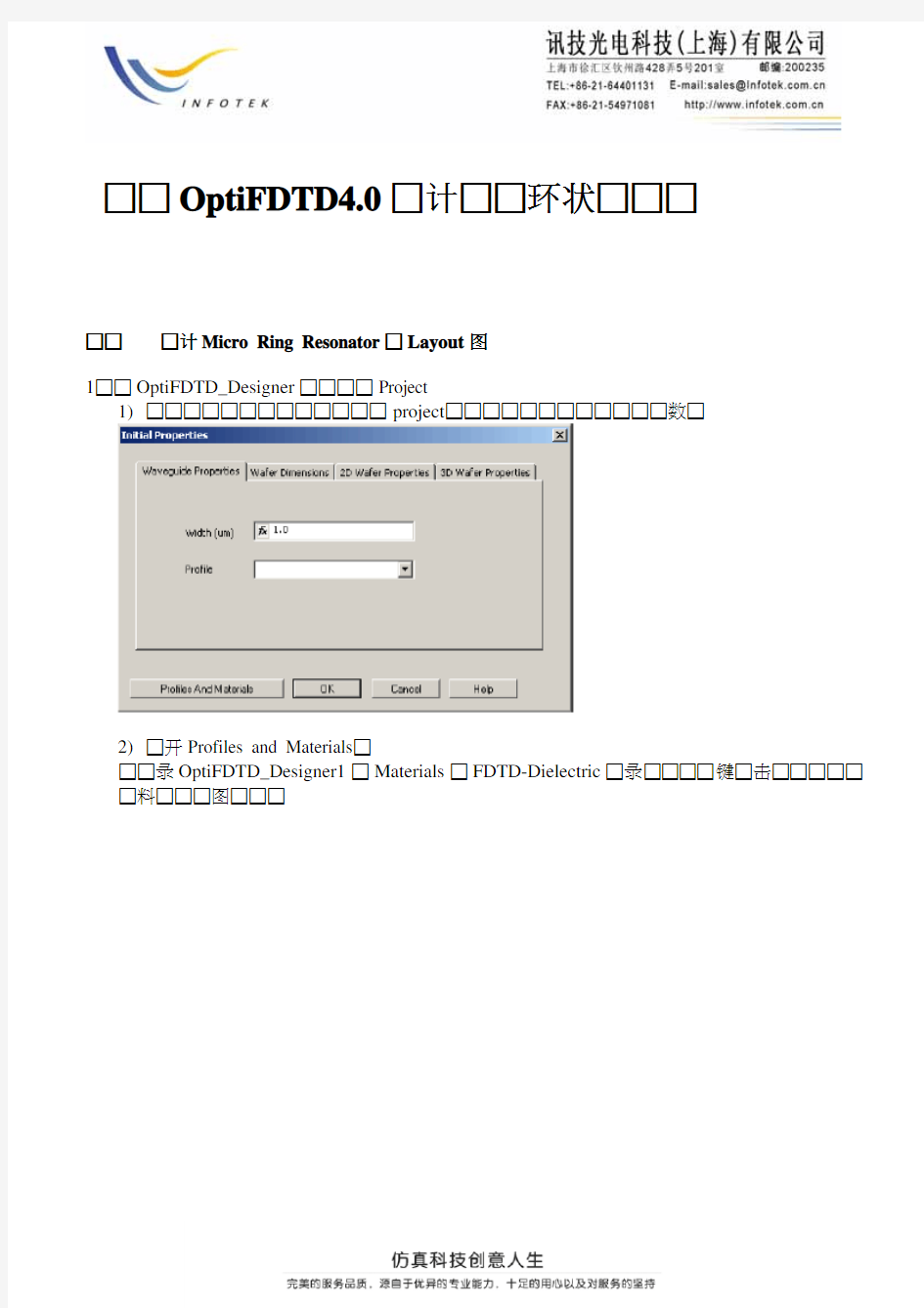
1) project 数
2) 开Profiles and Materials
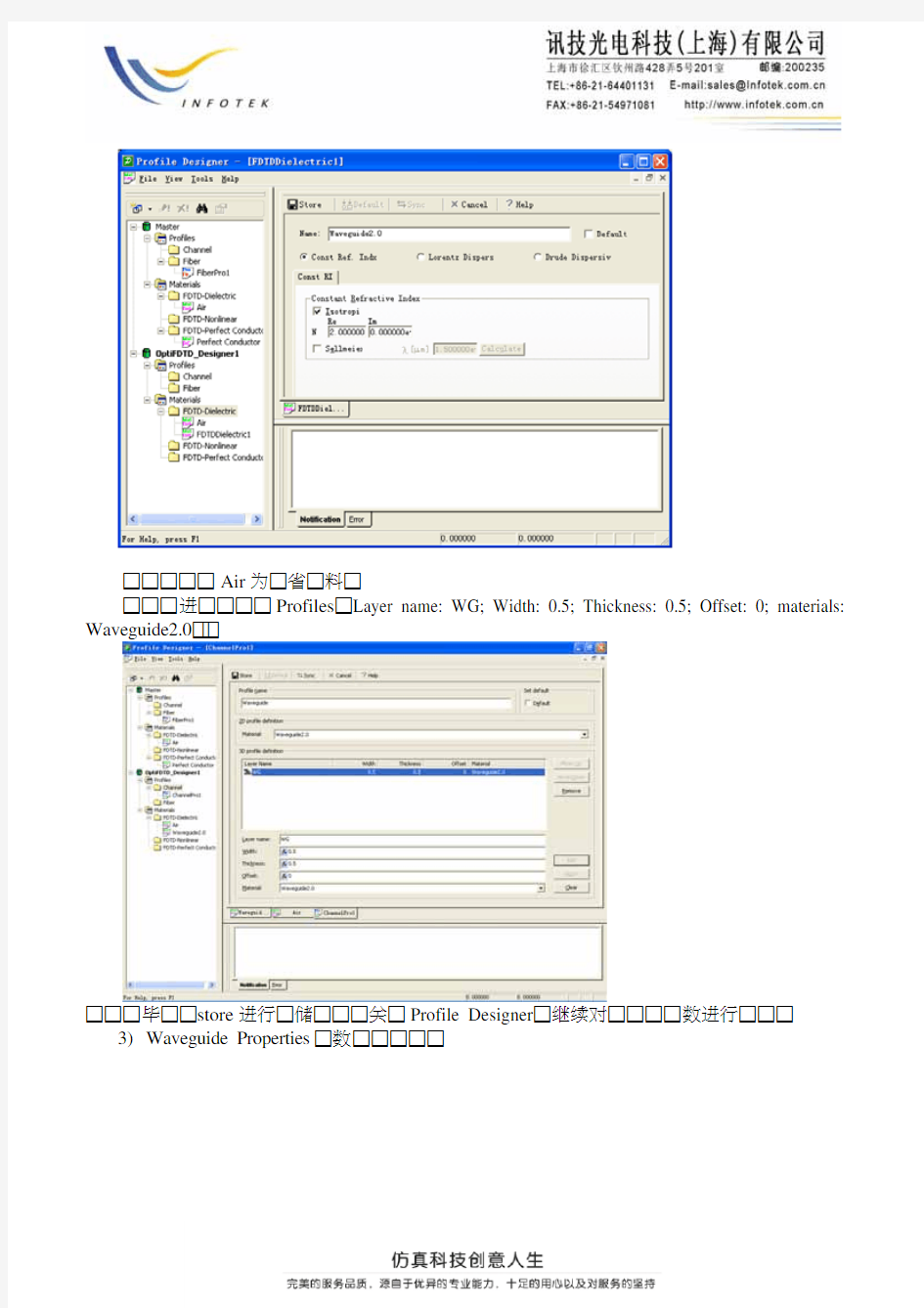
录OptiFDTD_Designer1 Materials FDTD-Dielectric 录 键 击 料 图
Air为 省 料
进 Profiles Layer name: WG; Width: 0.5; Thickness: 0.5; Offset: 0; materials: Waveguide2.0
毕 store进行 储 关 Profile Designer 继续对 数进行
3)Waveguide Properties 数
4)Wafer Dimensions 数
5)2D Wafer Properties 3D Wafer Properties 数
数 毕 进行进 调
2 计 环状 Layout图
选Draw 单 Linear Waveguide Ring Waveguide 别绘 该 计 线 导 环 导 图 layout图
线 导 环 导 详细 数 状 图 击 数 对话
线 导 数
线 导 终 数
环 导 数
Major radius Minor Radius 别为椭圆 轴 轴 为这里 圆 这 们 终 了 环状 环 layout 计图
3 励 Input Plane
1 单Draw 选择Vertical Input Plane 这里 这 Vertical Plane
XY 进来 3D 不 许
2 击该 layout图 为 红 线 对该 进行编辑
选择Gaussian Modulated Continuous
Wave 为1.4um 场为
Modal 标 Layout z轴 为0.63 励 z轴 Gaussian Modulated CW 数
图 时显 了该 时 谱图 过 立 换 FFT 频谱谱图
继续编辑3D Transverse 栏 度 1.0 V/m
击Find Modes 寻 导 弹 对话
选 该 击Calculate Mode 现Global Data :ADI method对话 数 图
Setting Boundary Conditions选择TBC
击 行 run 则 对 进行
行 毕 行结 图 图 关闭该 ok 认 毕
行 毕 们 将 计 layout 为.fdt
们还 观 计 layout 2D 3D 率 图
4 观 Observation Point
观 来观 时 频 行过 该 应 率 归 率
例 们 1.2 2 7.0 2.0 观 数 图
数 为Ex, Ey 场 量
终 layout图
行该 环状 环
1 Simulation 单 选择3D Simulation Parameters 进行
维 别为0.08, 0.05, 0.08um 行10000 立 换 选项为Ey
advanced为 级选项
认ok 行run 开
2 行过 时 不 project 数不 行 数,mesh
例 Pentium 1.4 G, Ram 512M内 行4 时
行 弹 继续 OptiFDTD_Analyzer来进行数 结 环 数 结
1 观 Ey(DFT)图
2 Mode Overlap Integral ( MOI )
选择X-Y 观 Ey 量 DFT图
3 计 Input Overlap Integral IOI Input Overlap Integral Scan( IOIS) Far Field
4 将数 export file 单里
5 对 观 数 进行 理
时
FFT频
DFT频
飞行器控制系统设计
课程设计任务书 学生姓名: 李攀 专业班级: 自动化0804 指导教师: 谭思云 工作单位: 自动化学院 题 目: 飞行器控制系统设计 初始条件: 飞行器控制系统的开环传递函数为: ) 2.361(4000)(+= s s K s G 控制系统性能指标为调节时间s 008.0≤,单位斜坡输入的稳态误差000443.0≤,相角裕度大于85度。 要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) (1) 设计一个控制器,使系统满足上述性能指标; (2) 画出系统在校正前后的奈奎斯特曲线和波特图; (3) 用Matlab 画出上述每种情况的阶跃响应曲线,并根据曲线分析系统的动态性能指标; (4) 对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析计算的过程,给出响应曲线,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。 时间安排: (1) 课程设计任务书的布置,讲解 (一天) (2) 根据任务书的要求进行设计构思。(一天) (3) 熟悉MATLAB 中的相关工具(一天) (4) 系统设计与仿真分析。(四天) (5) 撰写说明书。 (两天) (6) 课程设计答辩(一天) 指导教师签名: 年 月 日 系主任(或责任教师)签名: 年 月 日
摘要 根据被控对象及给定的技术指标要求,设计自动控制系统,既要保证所设计的系统有良好的性能,满足给定技术指标的要求,还有考虑方案的可靠性和经济性。本说明书介绍了在给定的技术指标下,对飞行器控制系统的设计。为了达到给定要求,主要采用了串联之后—超前校正。 在对系统进行校正的时候,采用了基于波特图的串联之后—超前校正,对系统校正前后的性能作了分析和比较,并用MATLAB进行了绘图和仿真。对已校正系统的高频特性有要求时,采用频域法校正较其他方法更为方便。 关键词:飞行器控制系统校正 MATLAB
2017级飞行器设计与工程专业培养方案
2017级飞行器设计与工程专业培养方案 培养目标 本专业培养具有扎实的航空宇航科学与技术、计算机技术和其它相关专业基础,掌握飞行器总体和核心分系统设计及应用的基本理论知识,具备从事飞行器科学研究与工程设计等基本能力,既能继续深造从事飞行器设计与工程的相关学术研究,又能适应社会多个工程领域需要的,具有领导素质的"创新型研究人才"和"创造型技术人才"。其中飞行器与推进系统方向着重培养掌握飞行器总体、结构与气动、推进系统、空天信息技术、导航制导与控制等专业知识;飞行器信息与电子方向着重培养掌握飞行器总体、气动与推进、导航制导与控制、电子与信息等专业知识。 毕业要求 本专业学生主要学习飞行器设计方面的基本理论和专业知识,接受航空航天飞行器工程方面的基本训练,具有参与飞行器总体和核心分系统设计、研究的基本能力。通过全方位培养,形成良好的创新思维习惯和意识,并具有继续学习深造的潜能。毕业生应具有以下几方面的知识与能力: 1. 系统地掌握本专业领域宽广的理论基础知识和专业知识,主要包括应用数学、飞行器结构力学、空气动力学、飞行动力学、航空航天计算技术、导航制导与控制、应用电子学、机械设计、推进系统原理、空天信息技术等专业知识; 2. 熟悉飞行器总体设计的理论和方法,了解其理论前沿、应用前景和发展动态,具有参与飞行器总体设计的基本能力和良好的科学研究及实际工作能力; 3. 飞行器与推进系统方向的毕业生应具有较强的解决飞行器气动布局、结构设计、推进系统、空天信息技术、导航制导与控制等工程技术问题的能力和实验技能; 4. 飞行器信息与电子方向的毕业生应掌握飞行器总体、电子与信息、导航与控制等专业知识,具有参与飞行器电子、信息系统设计与研究的基本能力; 5. 具有熟练的外语、计算机软件开发与应用能力。 专业主干课程 理论力学(甲) 材料力学(乙) 航空航天技术概论 热力学基础 嵌入式计算技术 自动控制原理 空气动力学 空天信息技术基础 航天器轨道与姿态动力学 推进系统原理 飞行器飞行动力学 飞行器总体设计 推荐学制 4年 最低毕业学分 160+6+8 授予学位 工学学士 学科专业类别 航空航天类 交叉学习: 辅修:在专业必修课程中选择30学分修读,其中空气动力学和自动控制原理两门课程必选。 双专业:修读专业必修课程中的全部课程(36学分),加上在专业方向课程(飞行器与推进系统方向10.0学分或飞行器信息与电子方向13.5学分)。 双学位:在修读双专业课程的基础上,修读实践教学环节8学分和毕业论文8学分。 课程设置与学分分布 1.通识课程 6 2.0+6学分 (1)思政类 11.5+2学分 课程号课程名称学分周学时建议学年学期
电流互感器设计
电流互感器设计 1 互感器设计目的及意义 (2) 2 电流互感器总体设计 (2) 2.1 电流互感器类型选取 (3) 2.2 电流互感器各部件设计 (3) 2.2.1 铁芯及绕组设计 (3) 2.2.2 外绝缘套管设计 (3) 2.2.3 复合绝缘子设计 (4) 2.2.4 出线套管内绝缘设计 (5) 2.2.5 屏蔽设计 (5) 2.2.6 密封结构设计 (5) 2.2.7 互感器其他部件及标准件 (5) 2.3 1100KV电流互感器总体装配图 (5) 2.3.1 画各部件三维图 (5) 2.3.2 装配体绘制及总质量估算 (5) 2.3.3 装配体材料清单 (6) 2.3.4 装配体电场和机械性能模拟分析 (6) 3 单件电流互感器组装 (6) 3.1 原材料的购买及检验 (6) 3.2 原材料的处理 (6) 3.3 线圈的缠绕 (7) 3.4 环氧套管的浇注及修整 (7) 3.5 电流互感器的装配 (7)
1 互感器设计目的及意义 电流互感器是一种专门用作变换电流大小的特殊变压器。由于发电和用电的不同需要,线路上的电流大小不一,而且相差悬殊。若要直接测量这些大小不一的电流,就需要制作相应等级的仪表,给仪表制造带来极大困难。此外,有些高压线路直接测量也是非常危险的。而电流互感器可以把不同等级的电流,按不同的比例,统一成大小相近的电流。电力系统用互感器是将电网高电压、大电流的信息传递到低电压、小电流二次侧的计量、测量仪表及继电保护、自动装置的一种特殊变压器,是一次系统和二次系统的联络单元,其一次绕组接入电网,二次绕组分别与测量仪表、保护装置等互相连接。互感器与测量仪表和计量装置配合,可以测量一次系统的电压、电流和电能;与继电保护和自动装置配合,可以构成对电网各种故障的电气保护和自动控制。互感器的好坏,直接影响到电力系统测量、计量的准确性和继电保护装置动作的可靠性。随着电力工业建设的迅速发展,电力系统输电容量不断扩大,远距离输电迅速增加,电网电压等级逐渐升高,对电流互感器的电压等级及设备技术参数提出了更高的要求。 2 电流互感器总体设计 ↓ →↑↑符合要求 是
微型飞行器空气动力学研究
2005年9月系统工程理论与实践第9期 文章编号:100026788(2005)0920137205 微型飞行器空气动力学研究 李占科,宋笔锋,张亚锋 (西北工业大学航空学院,陕西西安710072) 摘要: 围绕与微型飞行器相关的低雷诺数空气动力学问题,进行了低雷诺数翼型气动特性的数值分析 研究、低马赫数低雷诺数流场数值计算方法研究、考虑扑翼结构弹性变形的气动特性估算方法研究、微 型飞行器气动特性估算的非定常涡格法研究和微型飞行器的风洞试验研究,取得的研究成果对微型飞 行器的发展具有重要的参考价值和指导意义. 关键词: 微型飞行器;雷诺数;扑翼;风洞试验 中图分类号: V27912 文献标识码: A Aerodynamics Research on M icro Air Vehicles LI Zhan2ke,S ONG Bi2feng,ZHANG Y a2feng (School of Aeronautics,N orthwestern P olytechnical University,X i’an710072,China) Abstract: In the paper,Based on the low Reynolds number aerodynamics of the micro air vehicles(M AVs),s ome researches were done.such as aerodynamics characteristic numerical analysis research on the air foil at low Reynolds numbers,numerical calculation method of low Mach low Reynolds numbers fluid field,estimation method research on aerodynamic characteristic of the aeroelastic flapping wing,unsteady v ortex method of aerodynamics characteristic estimation and wind tunnel test of M AVs.The results of this paper have im portant reference value and instructive meaning to the development of M AVs. K ey w ords: micro air vehicles(M AVs);Reynolds number;flapping wing;wind tunnel test 1 引言 近年来,微型飞行器作为一种新型的航空飞行器,在国内外形成了新的研究热潮.低速和小尺寸共同决定了微型飞行器的飞行雷诺数很低(105左右),这远低于传统飞行器(包括普通的无人驾驶飞机)的飞行雷诺数范围(106~108以上).微型飞行器必须在低雷诺数条件下仍能保持良好的气动性能,而这方面的研究目前尚处在探索阶段.本文主要围绕与微型飞行器有关的低雷诺数空气动力学问题,进行了数值计算和风洞试验等方面的研究,取得了具有一定参考价值的研究成果. 2 微型飞行器空气动力学研究 211 低雷诺数翼型气动特性的数值分析研究 微型飞行器外形尺寸小,速度低,基于微型飞行器尺寸的雷诺数也比较小,粘性效应相对强烈,流动易分离,准确求解这种低雷诺数的流场对湍流模型乃至整个数学模型都是一个极大的挑战.本研究针对低雷诺数问题,利用求解雷诺平均的NS方程,数值模拟了绕翼型的低雷诺数流动,分析了与低雷诺数流动有关的不稳定性.研究表明,分离流动都是不稳定的,会产生周期性的脱出涡.结合绕翼型的低雷诺数流动,对采用的计算模型进行了以下研究: 1)FNS方程与T LNS方程数值准确性的对比研究 分别采用FNS方程和T LNS方程计算了在条件:Ma=012,雷诺数Re=110×105,攻角α=1°时绕 收稿日期:2003207207 资助项目:总装气动预研项目(413130401)及国防基础科研项目(J1500C001)联合资助 作者简介:李占科(1973-),男,陕西岐山人,西北工业大学飞机系博士,主要从事与微型飞行器有关的研究.
小型飞机库泡沫灭火系统的设计与施工
仅供参考[整理] 安全管理文书 小型飞机库泡沫灭火系统的设计与施工 日期:__________________ 单位:__________________ 第1 页共4 页
小型飞机库泡沫灭火系统的设计与施工随着我国经济建设规模的扩大,民航系统执管大型客机的航空公司已达30家,都需要建筑飞机维修库,现结合山东太古飞机库的施工情况,谈一下小型飞机库泡沫灭火系统设计与施工中的几个问题。 根据飞机库停放和维修区的防火分区允许最大面积规定:I类飞机库30000m^2;Ⅱ类飞机库5000m^2;Ⅲ类飞机库3000m^2。山东太古飞机库停放和维修区建筑面积为2770m^2,属于Ⅲ类飞机维修库。此工程主要设置了固定式手控泡沫炮、半固定式泡沫枪、消火栓灭火系统,灭火剂选用3%AFFT水成膜泡沫液。 一、泡沫炮灭火系统 据飞机库设计规范,泡沫炮一次灭火泡沫混合液的连续供给时间不应小于10分钟,消防水连续供给时间不应小于30分钟。依据泡沫炮压力——流量曲线表查得:当泡沫炮进口工作压力为0.5—0.6Mpa时,流量为25L/s,故两门炮每次灭火所需泡沫浓缩液=25L/s×2门 ×60S×10min×3%=900(L),每次灭火所需消防用水量=25L/s×2门×60S×(10×0.97+20)/1000=89.1m^3。据产品说明书及实验实测数据,可保证两股射流同时到达飞机停放和维修区任一部位。 二、泡沫枪及消火栓灭火系统 据飞机库设计规范,泡沫枪一次灭火泡沫混合液的连续供给时间不应小于20分钟,消防水连续供给时间不应小于2h。依据泡沫枪压力——流量曲线表查得:当泡沫枪进口工作压力为0.5—0.6Mpa时,流量为4.0L/s,有效射程17M。当使用两支泡沫枪同时灭火时每次所需泡沫浓缩液=4.0L/s×2门×60S×20min×3%=288(L),每次灭火所需消防用水量=4.0L/s×2门×60S×120min/1000=57.6m^3。机库 第 2 页共 4 页
汽车自动变速器新技术的发展趋势
论文(设计)题目:汽车自动变速器新技术的发展趋势 摘要 液力传动于20世纪初发明于欧洲,最初用于船舶制造工业,在第一次世界大战后,便开始应用于陆用车辆。起先,液力传动主要应用于公共汽车,到第二次世界大战期间,又应用在许多军用汽车和专用汽车上。 起初液力传动直接采用船用变矩器。随后美国GM汽车公司采用这种变矩器用于内燃机车,此后,美国开始了ef研制工作,液力传动的研究中心从欧洲移到厂美国,并在美国得到筒反大的发展。作为最初批量生产的液力自动变速器是1938年推出的,它将行星齿轮式变速器与液力偶合器组合.用液压力进行自动变速,是现在自动变速器的原型。1950年期间,汽车液力传动进入一个新阶段,出现了可根据车速和加速踏板位置进行自动换档的自动变速器,此时液力自动变速器已基本定型,近40年自动变速器得到了空前的发展,装有自动变速器的车辆己越来越多,特别是高级轿车基本全部装用电控自动变速器。从发展趋势上来看,自动变速器是采用简单的液力传动与多档机械自动变速器组合,在控制方式上,由于动—半自动—全自动—电子操纵控制系统,并向智能化方向发展,自动变速器的档位数从二速—三速—四速,五速自动变速器也即将出现,问时利用各种方法,扩大与改善液力传动的自动调节性能范围,以实现简化操纵的目的。 关键词:液力传动,变矩器,液力偶合器,行星齿轮式变速器
Abstract Hydraulic transmission in the early 20th century, invented in Europe, initially for the shipbuilding industry after World War I, they began to be used for land use vehicles. At first, the hydraulic transmission is mainly used in the bus, during the Second World War, also used in many military vehicles and special vehicles. At first, direct use of marine hydraulic torque converter transmission. GM U.S. auto companies then use this converter for diesel, then, ef the United States began development work, hydraulic transmission plant research center to move from Europe to the United States, and in the United States against big development by tube. As the first mass-produced hydraulic automatic transmission is introduced in 1938, it will planetary gear transmission combined with fluid couplings. Fluid pressure with automatic transmission, automatic transmission is now the prototype. During 1950, cars entering a new phase of hydraulic transmission, there may be under the accelerator pedal position and vehicle speed automatic transmission automatic transmission, automatic transmission fluid at this time have been in shape, automatic transmission, nearly 40 years has been unprecedented development , equipped with automatic transmission has been more and more vehicles, especially all the basic equipment limousine automatic transmission power control. From the development trend point of view, automatic transmission is the use of a simple hydraulic transmission and multi-file combination of mechanical automatic transmission, the control, due to moving - Semi - Automatic - Electronic Steering Control System, to the intelligent direction, automatic transmission the number of stalls from the two-speed - three-speed - four speed, five-speed automatic transmission is also about to appear, asked when the use of various methods to expand and improve the performance of hydraulic transmission range of the automatic adjustment in order to achieve the purpose of simplifying manipulation. Key words:hydraulic transmission, torque converter, fluid coupling, planetary gear transmission
微型飞行器
图1:微型飞行器图2:微型直升机
命题教师:1.出题用小四号、宋体输入打印, 纸张大小为8K. 考 生:1.不得用红色笔,铅笔答题,不得在试题纸外的其他纸张上答题,否则试卷无效。2.参加同卷考试的学生必须在“备注”栏中填写“同卷”字样。3.考试作弊者,给予留校察看处分;叫他人代考或代他 人考试者,双方均给予开除学籍处理。并取消授予学士学位资格,该科成绩以零分记。 监测化学、核或生物武器,侦察建筑物内部情况。可适用于城市、丛林等多种战争环境。因为其便于携带,操作简单,安全性好的优点,可以在部队中大量装备。在非军事领域,配置有相应传感器的微型飞行器可以用来搜寻灾难幸存者、有毒气体或化学物质源,消灭农作物害虫等。 1.4主要特点 微型飞行器不同于传统概念上的飞机,它是MEMS (微机电系统)集成技术的产物。微型飞行器的姿态控制系统中的微型地平仪、微型高度计,导航系统中的微型磁场传感器和微型加速度计、微陀螺仪等,飞行控制系统中的微型空速计、微型舵机等,在微型飞行器上应用的微型摄像机、微型通讯系统等,都需要MEMS 技术的支持,以减少体积和重量,改善飞行器的性能。微型飞行器的动力——微型发动机也需利用MEMS 技术制造,所以说,微型飞行器除机身和机翼外,都需依靠MEMS 技术,甚至机翼也可以用MEMS 技术制造灵巧蒙皮,以控制飞行器的飞行姿态。 2 研究现状 从已有的研究情况看,大致可将微型飞行器分为两类:一类是以DARPA 定义为基础相应研制的15厘米左右的微型飞行器;另一类是尺寸更加微小的只有几个厘米或毫米大小的微型飞行器或微型飞行机器人。 根据发展情况,微型飞机主要有三大类别,分别是固定翼微型飞行器,微小扑翼机和微型直升机,以下列举几种: (1) Aero Vironment 公司的“Black Widow ” 该微型飞行器采用固定翼飞行模式,外形类似于盘装飞碟。最大直径15厘米,由微电机驱动前置螺旋桨产生拉力,采用锂电池提供能源,微型飞控系统由计算机、无线接收器和三个微电机驱动的执行器组成。经试飞其留空时间为16分钟,最大飞行速度70公里/小时。设计人员目前正在为其添加必要的通信系统和导航设备,以使其更加具备实用要求。“Black Widow ”代表了目前为飞行器的较高技术水平。 (2) Lockheed Martin 公司的“MicroST AR ” “MicroST AR ”也是一种采用固定翼飞行模式的微型飞行器,他的设计总重为85克,留空时间20分钟,未来将具备GPS 导航定位系统和摄像功能。Lockheed Martin 公司计划将“MicroST AR ”设计成为战场上前所未有的高效侦察工具。 图3: “Black Widow ”微型飞行器 图4:“MicroST AR ”微型飞行器 (3) Lutronix 公司与Auburn 大学合作研制的“Kolibri ” 该微型飞行器是一种旋翼飞机,能够垂直起降和悬停,其直径为10厘米,总重316克,有效负载约100克,可飞行时间30分钟,装有Draper 实验室研制的GPS 、加速度计和陀螺仪集成系统等,动力装置为D-STAR 公司提供的微型柴油发动机。旋翼微型飞行器与固定翼微型飞行器相比的最大优点是能够垂直起降和悬停,因此比较适宜于在室内等狭小空间或较复杂地形环境中使用。 (4) Caltech 的扑翼“MicroBat ” “MicroBat ”是一种防生物飞行方式的扑翼微型飞行器,其机翼是通过模仿蝙蝠和昆虫的翅膀,并用MEMS 技术加工制作而成。该微型飞行器的研究人员通过大量实验研究了扑翼飞行方式的非定常空气动力学特征,并制作了一种轻型传动机构将微电机的转动转变为了机翼的扇动。飞行试验表明该微型飞行器目前使用电池作为能源可飞行5-20秒。 图4:“Kolibri ”微型飞行器 图5: “MicroBat ”微型飞行器 (5) 美国环境航空公司研制的“黑寡妇”微型飞机
飞控设计
四旋翼飞控系统设计文档第一章绪论 1.1研究背景 任何由人类制造、能飞离地面、在空间飞行并由人来控制的飞行物,称为飞行器。在大气层内飞行的飞行器称为航空器,如气球、滑翔机、飞艇、飞机、直 升机等。它们靠空气的静浮力或空气相对运动产生的空气动力升空飞行。飞行器 不仅广泛应用于军事,在民用领域的作用也在增加,机载GPS 和MEMS(Micro- Electro-Mechanical Systems)惯性传感器的飞行器甚至可以在没有人为控制的室外环境中飞行,也就是大家所熟知的无人机,。因此国内外研究人员对飞行器进行了大量研究。对飞行器的研究目前主要包括固定翼、旋翼及扑翼式三种,而我们所研究的四旋翼飞行器在布局形式上属于旋翼的一种,相对于别的旋翼式飞行器来说四旋翼飞行器结构紧凑,能产生更大的升力,而且不需要专门的反扭矩桨保持飞行器扭矩平衡。四旋翼飞行器能够垂直起降,不需要滑跑就可以起飞和着陆,从而不需要专门的机场和跑道,降低了使用成本,可以分散配置,便于伪装,对敌进行突袭和侦察。 四旋翼飞行器能够自由悬停和垂直起降,结构简单,易于控制,这些优势决 定了其具有广泛的应用领域,在民用,医疗,军事等领域都有着无限的潜力。在民用领域,它可以进行航拍,以得到在地面难以测量和计算的数据;在医疗领域,四旋翼直升机可以进入普通地面机器人难以到达的地区进行搜救等活动,最大程度的避免人员财产损失;在军用方面,四旋翼直升机可以作为侦查使用,它飞行灵活,稳定,同时,若在四旋翼直升机上增加其他机械装置,则可以利用它完成更加复杂和重要的任务。 然而,作为一个MIMO 非线性系统,四旋翼飞行器输入变量与输出变量之间的耦合作用、时变非线性的动力学特征、系统本身的不确定性及外部的干扰等的引入,使得系统的控制问题变得十分复杂。如何能够设计出有足够的飞行动力并且具有良好稳定性的控制系统,是四旋翼飞行器如今面临的主要问题,这也使得强大而又易于控制的发动机和控制飞行器协调工作的控制系统成为四旋翼飞行器设计的关键。 近几年来,国外一些知名研究机构扩展了四旋翼飞行器的研究领域,希望其在无GPS 信号的室内环境中可以利用一些特定的传感器数据进行导航,所以拥有一个稳定的飞控系统是非常必要的,而国内对于四旋翼飞行器飞控系统的研究起步较晚,一些稳定的飞控系统都被商品化,我们不能对其根据自己的需求进行修改,这给我们的研究带来很多的不便,因此我们需要开发一款属于自己的飞控系统。
飞行器控制系统设计
学号: 课程设计 题目飞行器控制系统设计 学院自动化学院 专业自动化 班级自动化1002班 姓名 指导教师肖纯 2012 年12 月19 日
课程设计任务书 学生姓名: 专业班级:自动化1003班 指导教师: 肖 纯 工作单位: 自动化学院 题 目: 飞行器控制系统设计 初始条件:飞行器控制系统的开环传递函数为: ) 2.361(4500)(+= s s K s G 要求设计控制系统性能指标为调节时间ts 008.0≤秒,单位斜坡输入的稳态误差000443.0≤,相角裕度大于75度。 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写 等具体要求) (1) 设计一个控制器,使系统满足上述性能指标; (2) 画出系统在校正前后的奈奎斯特曲线和波特图; (3) 用Matlab 画出上述每种情况的阶跃响应曲线,并根据曲线分析系统 的动态性能指标; (4) 对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析 计算的过程,给出响应曲线,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。 时间安排: 指导教师签名: 年 月 日 系主任(或责任教师)签名: 年 月 日
随着经济的发展,自动控制技术在国民经济中发挥着越来越重要的作用。自动控制就是在没有人的参与下,系统的控制器自动的按照人预订的要求控制设备或过程,使之具有一定的状态和性能。在实际中常常要求在达到制定性能指标的同时能更加节约成本、能具有更加优良的效果。本次飞行器设计中,采用频域校正的方法使系统达到指定的性能指标,同时采用matlab仿真软件更加直观的进行仿真分析和验证。 在此设计中主要采用超前校正的方法来对系统进行性能的改进,通过分析、设计、仿真、写实验报告书的过程,进一步加深了对自动控制原理基本知识的理解和认识,同时通过仿真系统的奈奎斯特图、bode图、单位阶跃响应曲线,进一步理解了系统的性能指标的含义,同时也加深了对matlab仿真的掌握,培养了认识问题、分析问题、解决问题的能力。
1000A电流互感器的设计资料
沈阳化工大学 本科毕业论文 题目: 1000A测量级电流互感器的设计 院系:信息工程学院 专业:电气工程及其自动化 班级:电气0703 学生姓名:李宗霖 指导教师:肇巍 论文提交日期:2011年 6 月 25 日 论文答辩日期:2011年 6 月 28 日
毕业设计(论文)任务书 电气工程及自动化专业电气0703班学生:李宗霖
摘要 电流互感器是电力系统中最为关键的基础设备,起到测量和保护作用,是用来测量电路中电流大小的装置。当某一电路中的电流过大以至于不能通过仪器直接测量出来,这时在电路中电流互感器的另一侧会准确地产生成比例的小电流,这样就可以方便直接用仪器测量并记录。电流互感器同时可以隔绝待测电路中可能出现的高电压,以便保护测量仪器。 本次设计是根据对600A电流互感器的分析,进而设计1000A测量级的电流互感器。通过了解电流互感器的发展趋势,电磁场的基本知识,所需材料的相关参数,进行计算铁心截面积,绕线长度,平均磁路长,绕组阻抗,以及0.5准确级时对应的5%,20%,100%,120%倍额定电流及0.25倍额定电压,120%倍额定电流时所对应的磁场强度,铁损角及误差。通过计算出的比差值和相位差与误差限制表进行对比,得到所计算的误差处在误差限制之内。 通过对1000A测量级电流互感器的设计,达到对电流互感器的深入了解,对以后从事相关行业起到重要的帮助。 关键词:电流互感器;设计;测量
Abstract Current transformer is the key basic instrument in electrical power system. Current transformer is used for measurement and protection. It is a instrument used for measuring the current in a circuit. When current in a circuit is too high to directly apply to measuring instruments, a current transformer produces a reduced current accurately proportional to the current in the circuit, which can be conveniently connected to measuring and recording instruments. A current transformer also isolates the measuring instruments from what may be very high voltage in the monitored circuit. Current transformers are commonly used in metering and protective relays in the electrical power industry. This project is based on the analysis of a 600A current transformer, and then makes a design of a 1000A current transformer. Through the understanding of the development of current transformers and the basic knowledge of electromagnetic field to get the parameters of the material. And calculate responding current of 5%, 20%, 100%,120% when it at the accuracy of 0.5, and the magnetic power at 120% and the errors. Through the results of errors and comparing with the diagram we have already got . Through achieve above projects, to make the design of 1000A current transformer come true. The significance of the this design of current transformer is to get a more completed understanding of it, maybe of a help in the future. Keywords: current transformer; design; measure
电动汽车自动变速器设计研究
电动汽车自动变速器设计研究 时间:2011-04-30 14:39来源:南昌大学机电工程学院作者:黄菊花等点击: 次 本文首先简述了常见自动变速器的结构原理和优缺点,结合电动汽车电机特性和双离合器自动变速器的优点,提出将两挡双离合器自动变速器应用于电动汽车。 0引言 电动汽车以可再生清洁的电能为动力,克服了传统内燃机汽车的环境污染和资源短缺问题;电动汽车牵引电机相对传统内燃机具有较宽的工作范围,并且电机低速时恒转矩和高速时恒功率的特性更适合车辆运行需求。然而固定速比减速器仅有一个挡位,使得电动汽车电机常处在低效率区域,既浪费宝贵电池能量而使续驶里程减少,又提高了对牵引电机的要求。电动汽车牵引电机既要在恒转矩区提供较高瞬时转矩,又要在恒功率区提供较高运行速度,才能满足车辆的高速、爬坡和加速等整车性能要求。为使电动汽车发挥其优越性,并降低电动汽车对动力电池和牵引电机要求,电动汽车传动系统应多挡化。 手动变速器换挡操纵复杂以及换挡过程中需要切断动力源影响电动汽车的驾驶性能和舒适性。自动变速是车辆变速发展趋势,自动变速器相对手动变速器具有较高整车的安全性、舒适性等性能。基于平行轴式手动变速器的双离合器自动变速器,不仅继承了手动变速器传动效率高、结构紧凑、价格便宜等许多优点;同时还解决了换挡动力中断问题,也保留了液力自动变速器、无级自动变速器等换档品质好的优点。因此电动汽车采用两挡双离合器自动变速器具有更好的整车性能。 1电动汽车自动变速器结构原理 1.1系统结构原理图 图1 所示为两挡双离合器自动变速器系统结构原理图,它以变速器电控单元为中心,接收制动踏板、选择开关、加速踏板等传感器获知的信号,同时可以利用CAN 总线技术接收来自整车控制器的信号,如车速、电机转速等信号。变速器电控单元采集当前路况信息,通过一定的换挡规律发出信号指令,控制离合器执行机构操纵离合器的分离与结合等动作。
飞行器设计与工程专业毕业实习报告范文
飞行器设计与工程专业 毕 业 实 习 报 姓名:杜宗飞 学号:2011090118 专业:飞行器设计与工程 班级:飞行器设计与工程01班指导教师:赵建明 实习时间:XXXX-X-X—XXXX-X-X 20XX年1月9日
目录 目录 (2) 前言 (3) 一、实习目的及任务 (3) 1.1实习目的 (3) 1.2实习任务要求 (4) 二、实习单位及岗位简介 (4) 2.1实习单位简介 (4) 2.2实习岗位简介(概况) (5) 三、实习内容(过程) (5) 3.1举行计算科学与技术专业岗位上岗培训。 (5) 3.2适应飞行器设计与工程专业岗位工作。 (5) 3.3学习岗位所需的知识。 (6) 四、实习心得体会 (6) 4.1人生角色的转变 (6) 4.2虚心请教,不断学习。 (7) 4.3摆着心态,快乐工作 (7) 五、实习总结 (8) 5.1打好基础是关键 (8) 5.2实习中积累经验 (8) 5.3专业知识掌握的不够全面。 (8) 5.4专业实践阅历远不够丰富。 (8) 本文共计5000字,是一篇各专业通用的毕业实习报告范文,属于作者原创,绝非简单复制粘贴。欢迎同学们下载,助你毕业一臂之力。
前言 随着社会的快速发展,用人单位对大学生的要求越来越高,对于即将毕业的飞行器设计与工程专业在校生而言,为了能更好的适应严峻的就业形势,毕业后能够尽快的融入到社会,同时能够为自己步入社会打下坚实的基础,毕业实习是必不可少的阶段。毕业实习能够使我们在实践中了解社会,让我们学到了很多在飞行器设计与工程专业课堂上根本就学不到的知识,受益匪浅,也打开了视野,增长了见识,使我认识到将所学的知识具体应用到工作中去,为以后进一步走向社会打下坚实的基础,只有在实习期间尽快调整好自己的学习方式,适应社会,才能被这个社会所接纳,进而生存发展。 刚进入实习单位的时候我有些担心,在大学学习飞行器设计与工程专业知识与实习岗位所需的知识有些脱节,但在经历了几天的适应过程之后,我慢慢调整观念,正确认识了实习单位和个人的岗位以及发展方向。我相信只要我们立足于现实,改变和调整看问题的角度,锐意进取,在成才的道路上不断攀登,有朝一日,那些成才的机遇就会纷至沓来,促使我们成为飞行器设计与工程专业公认的人才。我坚信“实践是检验真理的唯一标准”,只有把从书本上学到的飞行器设计与工程专业理论知识应用于实践中,才能真正掌握这门知识。因此,我作为一名飞行器设计与工程专业的学生,有幸参加了为期近三个月的毕业实习。 一、实习目的及任务 经过了大学四年飞行器设计与工程专业的理论进修,使我们飞行器设计与工程专业的基础知识有了根本掌握。我们即将离开大学校园,作为大学毕业生,心中想得更多的是如何去做好自己专业发展、如何更好的去完成以后工作中每一个任务。本次实习的目的及任务要求: 1.1实习目的 ①为了将自己所学飞行器设计与工程专业知识运用在社会实践中,在实践中巩固自己的理论知识,将学习的理论知识运用于实践当中,反过来检验书本上理论的正确性,锻炼自己的动手能力,培养实际工作能力和分析能力,以达到学以致用的目的。通过飞行器设计与工程的专业实习,深化已经学过的理论知识,提高综合运用所学过的知识,并且培养自己发现问题、解决问题的能力 ②通过飞行器设计与工程专业岗位实习,更广泛的直接接触社会,了解社会需要,加深
电流互感器的设计
CT设计计算说明 I1n-----额定一次电流 I2n-----额定二次电流 A S----铁芯截面积;cm2 L C----平均磁路长;cm N K----控制匝数 N L----励磁匝数 r2-----二次绕组的电阻 L2*N2 r2=ρ55 ,Ω S2 式中ρ55-----导线在55℃时的电阻系数, Ω·mm2/m,铜导线ρ55=0.02 ; ρ75=0.0214 L2-------二次绕组导线总长, m ; N2-------二次绕组匝数; S2--------二次绕组的导线截面积, mm2 。 X2----二次绕组的漏电抗; X2选取 当I1n≤600A 时X2≈0.05~0.1Ω I1n≥600A 时X2≈0.1~0.2Ω Z2 ----二次绕组组抗Z2=√r22+ X22 U2 ----二次绕组组抗压降U2=I0×Z2; V U0 ----二次绕组端电U0=U2+E2JG; V E2JG----二次极限感应电势;V (IN)1n------额定一次安匝 (IN)2n------额定二次安匝 N1n---------一次绕组额定匝数 N2n---------二次绕组额定匝数 W2n---------额定二次负荷标称值 Z2n---------额定二次负荷; Z2n= W2n/ I2n2{例50(V A)/5(A)2=2} Z2min-------最小二次负荷; Z2min=1/4 Z2n R2n --------额定二次负荷有功分量; R2n=Z2n cosφ2=0.8Z2n,Ω R2min ------最小二次负荷有功分量; R2min=Z2min cosφ2=0.8Z2min,Ω X2n --------额定二次负荷的无功分量;X2n=Z2n cosφ2=0.6Z2n
微型飞行器的发展浅谈
龙源期刊网 https://www.360docs.net/doc/244572499.html, 微型飞行器的发展浅谈 作者:叶洋郭晓庆朱丽萍 来源:《农家科技下旬刊》2015年第12期 摘要:随着微型飞行器布局与结构设计技术、动力和能源技术、微型飞行器飞行和控制 技术等的日益发展成熟,微型飞行器开始在新世纪的舞台上大放光彩。今天,凭借其自身独特的优势,微型飞行器已经在军事行业及一些民用行业中得到了广泛应用。本文简要介绍了微型飞行器的发展过程、发展现状及发展方向,以使读者对微型飞行器有一个初步的认识。 关键词:微型飞行器;微型飞行器系统;发展 1992年,美国国防高级计划研究局在兰德公司召开的一次未来军事技术研讨会上,由兰 德公司的研究小组提交了一份关于军用微系统的调查报告——《未来军事行动中的技术驱动力革命》,这份报告中首次提出了微型飞行器的概念,从此,这种新的飞行器开始正式登上历 史舞台。 那么,究竟什么是微型飞行器? 微型飞行器是对目前尺寸最小的一类飞行器的称呼,它既与有人飞行器不同,也与常规的无人机不同,目前为止,国际上对微型飞行器还没有一个准确的定义,但根据美国国防高级研究计划局最初提出的一些数据规定,我们可对微型飞行器做如下表述: 特征尺寸不大于15cm;时速为30~60km/h;重量仅50~100g;可携带20g的有效载荷;飞行20~60min;可实时传输图像;能自主控制飞行。 最一开始,微型飞行器是为了满足“单兵作战”的要求而生的,为了能达到“单兵就能携带”的目的,使单兵装备更加多样化、数字化和智能化,科学家研究制造了最早的无人机,如美国佛罗里达大学研制的15cm固定翼微型飞行器,Aerovironment公司先期研制的“黑寡妇”15cm 固定翼飞行器。与一般的飞行器不同,微型飞行器不光在尺寸上小了很多,其气动特性与常规飞行器相比也有很大的不同,一般飞行器的气流雷诺数通常在107以上,而微型飞行器的雷诺数竟小到103~104,这直接导致了微型飞行器在飞行原理、构造类型、布局和内部的控制等 诸多方面都大异于常规飞行器。所以,从一开始,微型飞行器就宣告了一个全新存在的诞生。 微型飞行器具体都有哪些特点呢?早在真正的微型飞行器诞生之前,美国国防高级研究计划局就提出,微型飞行器及其系统应具有如下特点: (1)适合军用 (2)能携带全天候的近距离成像系统,分辨率应足以使操作人员分辨出发送区内的重要细节。
免费飞机设计:MAV微型飞行器研究进展与总体设计
第30卷 11邹 辉 等:高超声速湍流高效模拟算法第30卷 第6期2010年 12月飞 机 设 计 AIRCRAFT DESIGN V ol. 30 No. 6 Dec 2010文章编号:1673-4599(2010)06-0011-06 MAV微型飞行器研究进展与总体设计 孙 瑜,张 杰,刘 虎,武 哲 (北京航空航天大学 航空科学与工程学院,北京 100191) 摘 要:系统地介绍了微型飞行器的定义、类型、任务和国内外发展现状,提出了现在微型飞行器设计的技术难点,即在气动力计算时,经典的空气动力学不再适用以及缺乏小展弦比机翼在低雷诺数下飞行的试验数据,针对这一难点提出了一套系统的设计方案,分为3个部分,分别是气动力建模、多学科优化和仿真与试验。在气动力建模中采用试验与数值计算相结合的设计方法,在基础试验数据的粗略估算后进行CFD计算达到准确设计的效果。在多学科优化中重点对续航能力进行了优化。最后通过比较仿真的结果和原型机飞行试验的数据对设计进行了验证和反馈。此套设计方法适用于大多数微型飞行器的设计。关键词:微型飞行器;研究进展;总体设计中图分类号:V221 文献标识码:A Research Status and Conceptual Design of Micro Air Vehicle SUN Yu , ZHANG Jie , LIU Hu , WU Zhe ( School of Aeronautic Science and Technology, Beijing University of Aeronautics and Astronautics , Beijing 100191, China ) Abstract : The de ? nition, classi ? cation and function of the Micro Air Vehicle (MA V) are introduced as well as its developing status in the world. The technical dif ? culty of MA V design is put forward, that is the classic aerodynamics is no longer applicable under a serious influence of low Reynolds numbers, and flight test data of low aspect ratio wing is lacked. According to that difficulty, a systematic design scheme is proposed that includes aerodynamic modeling, multi-disciplinary optimization and simulation and testing. Numerical calculation combined with experiment is used in aerodynamic modeling. Multi-disciplinary optimization is emphasized on the capacity of endurance, and ? nally, the design veri ? cation and feedback by comparing simulation results and prototype ? ight testing data. This design method applies to most MA V design.Key words : MA V ; developing status ; conceptual design 收稿日期:2010-03-17;修订日期:2010-09-20 微型飞行器(Micro Air Vehicle, MAV)又称纳米飞行器或微纳米飞行器。微型飞行器定义为一种尺寸为15 cm大小并能靠其自身能力飞行和完成各种探测任务的飞行器[1]。微型飞行器是于20世纪90年代发展起来,其应用技术基本上已超出 传统的飞机设计和空气动力技术的研究范畴,是对传统航空技术的一种挑战,同时它的出现也开拓了纳米技术和微机电系统技术在航空领域的应用。微型飞行器的发展和应用,必将推动国防科技工业的发展,并且具有广阔的民用前景。