基于OpenGL的飞机刹车视景仿真系统研究

收稿日期:2006-08-10
基金项目:航空基金资助项目(05E53025)
作者简介:钱莉莉(1982—)女,新疆霍城人,硕士研究生,研究方向为计算机测控及仿真;谢利理(1963—)男,陕西凤翔人,教授,博士,研究方向为电气自动化理论与应用、计算机测控技术、故障检测与诊断技术等。
基于OpenG L 的飞机刹车视景仿真系统研究
钱莉莉,谢利理
(西北工业大学自动化学院,陕西西安 710072)
摘要:视景仿真作为飞机刹车半实物仿真的一部分,实现了飞机刹车仿真的可视化。在设计过程中将OpenG L 、3DS Max 和
串行通信技术有效结合,解决了飞机刹车过程的三维视景系统模拟仿真问题。仿真软件以V isual C ++为平台,采用开放型图形库(OpenG L )实现了飞机刹车过程可视化的场景绘制、纹理映射、视点变换及动画仿真,利用3DS Max 建立了飞机实体模型,飞机刹车过程的动态演示随RS 2485实时通信数据不断刷新,以实现飞机刹车过程的可视化处理、数据记录和视景回放。
关键词:视景仿真;飞机刹车;OpenG L;串行通信;3DSMax 中图分类号:TP391.9 文献标识码:A 文章编号:1000-8829(2007)08-0078-03
Study on A i rcraft Break i n g V isua l S i m ul a ti on Syste m Ba sed on O penGL
Q I A N L i 2li,X I E L i 2li
(College of Aut omati on,Northwestern Polytechnical University,Xi ’an 710072,China )
Abstract:V isual si m ulati on syste m makes aircraft breaking si m ulati on visual .OpenG L,3DSM ax and serial communicati on technol o 2gy are used effectively in devel op of the system.U sing these technol ogies,the p r oblem of three 2di m ensi onal visual si m ulati on of the aircraft breaking is s olved commendably .The visual si m ulati on syste m based on VC ++achieves the dra wing of the breaking scene,texture mapp ing,the manage ment of the visual angles and the visual si m ulati on using OpenG L.W ith setting up the aircraft model u 2sing 3DS Max and receiving the seriate data fr om RS 2485,the functi on of si m ulating,recording and rep laying the p r ocess of the air 2craft breaking can be achieved factually .
Key words:visual si m ulati on;aircraft breaking;OpenG L;serial communicati on;3DS Max
视景仿真技术是以计算机实时三维图形生成技术为实现途径,结合文字、动画、声音等处理技术,对真实环境进行视觉和听觉上的模拟,建立逼真的虚拟环境,以便利用此虚拟环境完成仿真试验研究的一门综合技术。目前视景仿真不仅广泛应用于工程设计、游戏、艺术造型、大众传媒等领域,而且正以其直观、形象、符合人们思维方式的优势进入军事训练、航海、航天飞行、武器对抗、战术战法研究等科研领域。但是对于飞机刹车半实物仿真,视景仿真还是一个崭新的领域。本研究以OpenG L 作为显示环境,引入飞机刹车半实物仿真系统的视景演播,直观动态地模拟了飞机着陆刹车过程的飞机机体与机轮的运动和状态变化情况,为飞机在不同环境下的刹车特性研究提供了实验分析环境。
1 视景仿真系统的组成
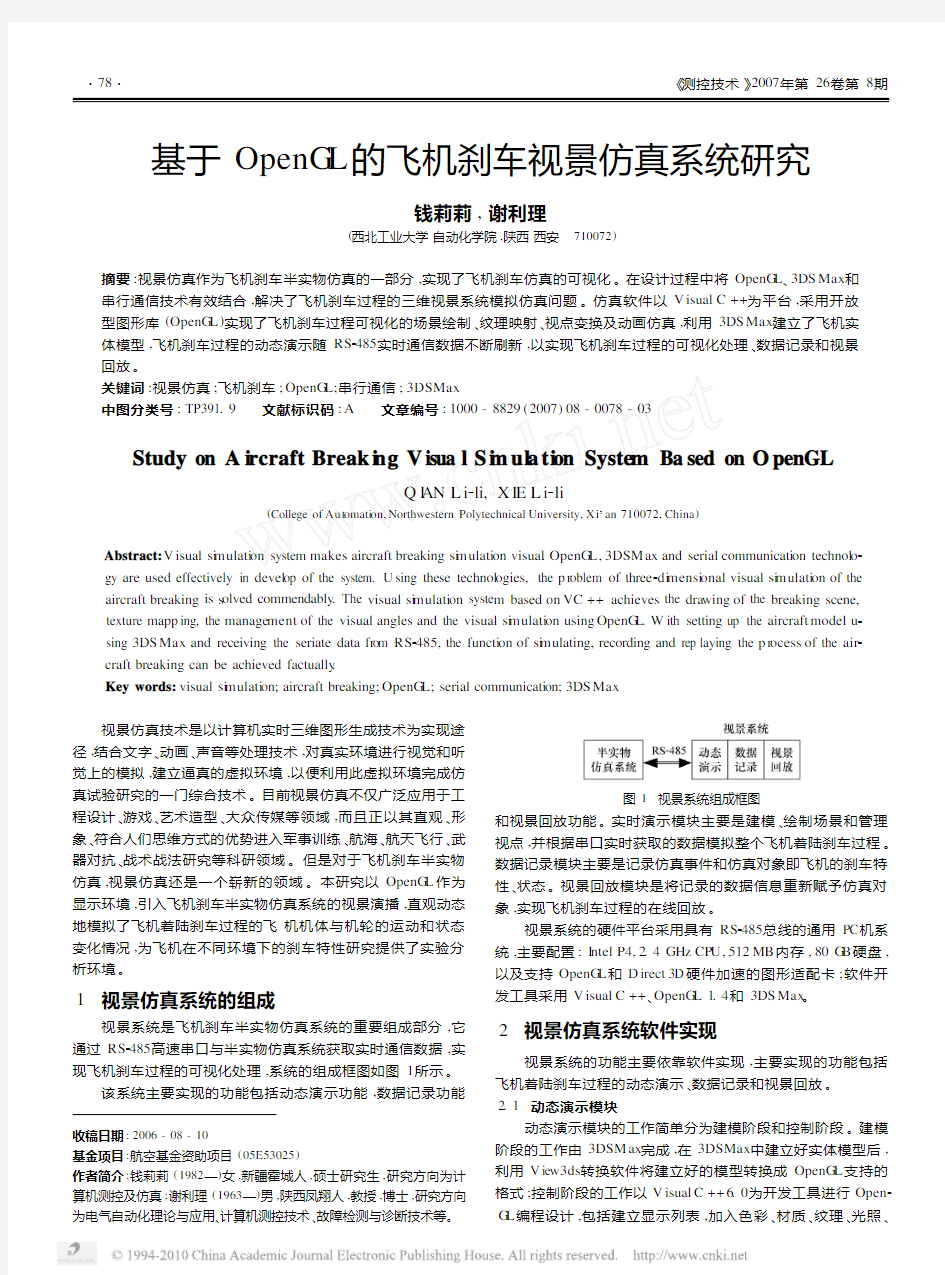
视景系统是飞机刹车半实物仿真系统的重要组成部分,它
通过RS 2485高速串口与半实物仿真系统获取实时通信数据,实现飞机刹车过程的可视化处理,系统的组成框图如图1所示。
该系统主要实现的功能包括动态演示功能,
数据记录功能
图1 视景系统组成框图
和视景回放功能。实时演示模块主要是建模、绘制场景和管理
视点,并根据串口实时获取的数据模拟整个飞机着陆刹车过程。数据记录模块主要是记录仿真事件和仿真对象即飞机的刹车特性、状态。视景回放模块是将记录的数据信息重新赋予仿真对象,实现飞机刹车过程的在线回放。
视景系统的硬件平台采用具有RS 2485总线的通用PC 机系统,主要配置:I ntel P4,2.4GHz CP U,512MB 内存,80G B 硬盘,以及支持OpenG L 和D irect 3D 硬件加速的图形适配卡;软件开发工具采用V isual C ++、OpenG L 1.4和3DS Max 。
2 视景仿真系统软件实现
视景系统的功能主要依靠软件实现,主要实现的功能包括飞机着陆刹车过程的动态演示、数据记录和视景回放。
2.1 动态演示模块
动态演示模块的工作简单分为建模阶段和控制阶段。建模
阶段的工作由3DSM ax 完成,在3DSMax 中建立好实体模型后,利用V ie w3ds 转换软件将建立好的模型转换成OpenG L 支持的格式;控制阶段的工作以V isual C ++6.0为开发工具进行Open 2
G L 编程设计,包括建立显示列表,加入色彩、材质、纹理、光照、
?87?《测控技术》2007年第26卷第8期
背景等,确定合适的投影、视口的变换,通过串口接收飞机刹车数据参数,引入到定义的运动方式方程计算出飞机的新坐标,根据坐标数据重新绘制实体,以此实现飞机刹车过程的实时仿真。动态演示模块的工作流程如图2所示
。
图2 动态演示模块工作流程图
2.1.1 系统主框架的建立
OpenG L 与VC ++6.0的绘图环境不同,绘制前先要进行
环境设置。首先为应用程序连接OpenG L 图形库:opengl32.lib 、
glu32.lib 、glaux .lib,然后打开MFC 对话框,为应用程序的视图
对象添加消息处理函数[1],为了能够实时控制整个仿真过程,故将整个窗口分为C A ir p lane Model V ie w 和CContr ol W nd 两部分。
CA ir p lane Model V iew 部分用于显示仿真过程;CContr ol W nd 部分
用于控制仿真过程和实时显示仿真数据。窗口的分割可以使用下列语句完成:
if (s p.CreateStatic (this,1,2)==NULL )return F ALSE;
if (!s p.Create V ie w (0,0,RUNTI M E_C LASS (CA ir p lane Model 2V ie w ),CSize (100,100),pContext )||!s p.Create V ie w (0,1,RUNTI M E_C LASS (CContr ol W nd ),CSize (100,100),pContext ))//分屏 {
s p.Destr oy W indow (); return F ALSE; }
s p.Set Colu mn I nfo (0,cx 33/4,100);这样就完成了应用程序框架的构建。
2.1.2 像素格式的设置
像素格式定义了OpenG L 绘图的属性,这些属性包括绘图界面的颜色表示模式、颜色位数、累积缓存区、深度缓存区和模板缓存区的位数等信息[2]。像素格式的设置过程中首先要定义像素格式,每个OpenG L 显示设备都支持一种指定的像素格
式,用一个名为P I XE LF OR MAT DESCR I PT OR 的结构体来表示这一特殊的像素格式。建立了图形操作描述表并初始化P I X 2E LF0R MAT DESCR I PT0R 结构后,应以此结构为变量,利用ChoosePixelFor mat ()函数为设备描述表选择像素格式,最后调用SetPixelFor mat ()将其设置为当前像素格式。
I nt
p ixelfor mat =ChoosePixelFor mat (m ->pDC ->GetSafeHdc (),&pfd ); Bool
Result =SetPixelFor mat (m _pDC ->GetSafeHdc (),p ixelf or 2mat,&pfd );
2.1.3 三维模型的绘制及读入
OpenG L 在对三维场景和模型的实时控制及可视化系统的
二次开发等方面与3DS Max 相比存在着很大优势。但是Open 2G L 没有提供三维绘图的高级命令,它只能通过简单的图元:点、线和多边形来建立三维模型,而利用3DS Max 建模工作量则要小得多,具体的步骤如下:
(1)三维模型绘制。
首先利用3DS Max 建立飞机模型,输出文件名为p lane .3ds 。要把p lane .3ds 作为OpenG L 的物理实体模型,还需要利用名为V ie w3ds 的软件将p lane .3ds 文件转换成C 语言支持的文件格式。具体的实现方法是:在命令行中输入命令V iew3ds
,会弹出一个显示需要转换的3ds 飞机模型的窗口。在窗口中单击左键,点击弹出菜单的Export OpenG L C Code 项,则生成与模型名同名的两个文件:p lane .h 和p lane .gl 。
(2)三维模型的读入。
把上一步生成的文件p lane .h 和p lane .gl 添加到当前工程文件夹中,在文件p lane .h 中会自动生成一个名为G L3DS_ini 2tialize_p lane ()的函数,在绘图函数初始化部分加入如下代码:int model =G L3DS_initialize_p lane ()。当要绘制模型时,用显示列表的方式即gl Call L ist (model )即可。
采用OpenG L 库中的显示列表功能,将三维场景中的实体分别定义为单独的显示列表,预先生成三维实体。在图形显示时,只需调用所需的显示列表即可显示相应的三维实体,而不需要重新计算实体在场景中的坐标,这样可以极大地提高动画的显示速度。2.1.4 场景的绘制
视景系统的场景主要包括地面、天空、地面物体和机场跑道。场景的绘制渲染采用纹理贴图的方法,纹理的使用可以使场景效果更生动逼真。在3D 图形中,纹理映射被广泛应用,绘制纹理的步骤包括4部分:定义纹理、控制滤波、说明映射方式、绘制场景给出顶点的纹理坐标和几何坐标。但是纹理映射只能在RG B 模式下使用,不适用于颜色索引模式。
首先把需要的图像文件添加到当前工程文件夹的data 文件夹中,利用函数aux D I B I m age Load (Filena me )装载位图,然后创建纹理,如:if (Texture I m age[0]=Load B MP ("Data /filena me .b mp")) {
Status =T RUE;
glGenTextures (1,&texture[1]);
gl B indTexture (G L_TEXT URE_2D,texture[1]);
glTexPara meteri (G L _TEXT URE _2D,G L _TEXT URE _MAG_
?
97?基于OpenG L 的飞机刹车视景仿真系统研究
F I L TER,
G L_L I N E AR );
glTexPara meteri (G L _TEXT URE _2D,G L _TEXT URE _M I N _F I L TER,G L_L I N E AR_M I P MAP_N -E AREST );
glu Build2DM i pmap s (G L _TEXT URE_2D,3,Texture I m age [0]->sizeX,Texture I m age[0]->sizeY,G L _RG B,G L _UNSI G NE D _BYTE,Texture I m age[0]->data );}
其中函数glTexPara meteri ()的参数设置用于控制纹理的滤波方式和对纹理坐标的处理方式。接着利用glTexEnvi ()函数创建纹理环境,也就是选择纹理的映射方式,告诉OpenG L 使用哪一个纹理函数来计算被贴上纹理的多边形表面的颜色值。完成上述初始化后,就可在On D ra w ()函数中打开纹理glEnable (G L _TEXT URE_2D )绘制场景了。2.1.5 视点管理
建立一套控制视点位置和角度的观测方法可以使观察者从全局和局部观察整个仿真过程。视景仿真中使用3种不同的视点:固定视点、绑定视点和跟踪视点。固定视点是指视点固定在空间一点,去观察空间中一个固定的区域[3]。本系统的后视点、空中固定视点、地面固定视点都属于固定视点,用于观测全局。绑定视点是指视点和空间物体绑定在一起,以便物体和视点一起运动,本系统的侧视点和俯视点就是这样的一类绑定视点,如图3所示。飞机跟踪视点则属于跟踪视点,跟踪视点是指视点的位置是固定的,但被观察点的位置是变化的。
本系统视点的管理采用键盘交互的方式,通过移动和转动视点的位置和角度,来控制视点以便继续观察。实现的原理是通过消息循环机制,系统捕捉到键盘中某键被按下的事件信息,发送给适当的窗口函数,处理后视点做出相应的改变,任一视点在场景激活的同时,场景会自动关闭前一个视点
。
图3 俯视点
2.1.6 仿真动画实现
OpenG L 是通过支持双缓存技术来实现动画的。双缓存技
术就是在屏幕上实现绘制图形以前,OpenG L 先分配两个颜色缓
存区,在显示前台缓存中的图像同时,后台缓存绘制第2幅图像。当后台绘制完成后,后台缓存中的图像就显示出来,此时原来的前台缓存开始绘制第3幅图像,如此循环往复,以增加图像的输出速度。前后缓存区的交换可以通过一个函数实现,在W indows 编程环境下调用下面函数:S wapBuffers ();在C 语言编程环境下调用下面函数:glutS wapBuffers (),显然本系统则是在W indows 编程环境下完成的。具体实现过程中,首先在设置像素格式函数SetupPixelFor mat ()中将窗口显示属性设置为PF D_DOUBLE BUFFER 即双缓存模式,然后利用OpenG L 绘制命令绘图,绘图结束后切换缓存即
BOOL C A ir p lane Model V ie w ∷RenderScene ()
{ …
∷S wapBuffers (m_pDC ->GetSafeHdc ()); //交互缓冲区 …}
最后使用计时器控制动画的刷新频率,达到动画效果。2.1.7 串行通信
M SComm 是M icr os oft 公司提供的简化W indows 下串行通信编程的ActiveX 控件,它为应用程序提供了通过串口收发数据的简便方法。但MSComm 不是工具箱控件,在VC 中使用该控件时首先要将该控件插入到当前Pr oject 中[4]。
串口通信中交换的数据大多数是字符串数据,而飞机刹车数据是浮点型,故先要进行数据转换,将其转换成字符串,然后进行发送,这样通信的双方才能根据一定的数据格式做出解释。视景仿真过程中共要传送3个数据,包括飞机速度、机轮速度和飞机俯仰角。每个数据按一定的格式以ASC II 码形式发送,数据的信息块长度是固定的,第1个字符是数据的标志信息,后7个字符是数据信息。接收程序收到数据信息块后以相同的格式转换为浮点数,再根据标志字符将其赋到相应的变量中。
另外本系统利用多线程技术,因为三维场景渲染和数据分析需要占用大量系统资源(CP U 和内存),故在主线程下产生一个工作线程来接收数据,这样做可以极大地改善程序运行效果。
系统的运行结果图如图4所示
。
图4 系统运行结果图
2.2 数据记录模块
飞机刹车的整个过程很短暂,而数据记录则为分析研究刹车过程飞机的一些参数变化提供依据。记录数据的方法有很多种,本系统采用C ++中文件流的方法,此方法简单灵活,可以很好地完成此项功能。在记录数据的过程中,为了区分不同的记录文件,程序自动将当前的时间日期作为记录文件的名称,文件存为3.dat 格式。程序调用f p rintf ()函数录入数据,一行录入一帧的数据,一帧包含3个数据:俯仰角、飞行速度和机轮速度。此外要特别注意写入的顺序,因为回放时要按同样的顺序读取。2.3 视景回放模块
视景回放主要是对仿真过程的再现,即飞机刹车特性和状态的再现,它与实时演示的不同仅在于数据来源不同。一旦选择了视景回放,视景系统则无需再从串口获取数据,仿真对象的运动参数将从记录文件中读取。与数据记录不同的是程序调用fscanf ()函数读取选中的记录文件,一次读出一帧的数据,并将此数据信息赋予仿真对象,此时场景中的仿真实体模型会重新
运动起来,完成视景回放。
(下转第83页)?
08?《测控技术》2007年第26卷第8期
法[11]
。
图3 被控制部分
通常可假定W eb 服务器在其运行点近旁的输出y 与输入u
之间的关系为下列线性的AR MA 方程
y (k )+a 1y (k -1)+…+a n y (k -n )=b 1u (k -1)+…+
b n u (k -n )
(3)
在W eb 的运行中,加上一个系统辨识的模块,通过对输入u 和输出y 的一段时间的测量,运用辨识方法(如最小二乘法、Kal m an 滤波法等),可确定出式(3)的阶数n 和参数(a 1,…,a n ,b 1,…,b n )。2.4 控制算法
设计W eb QoS 反馈控制系统的另一重要问题,是确定图2中控制器的控制算法,以使闭环动态系统达到所要求的稳态和动态性能要求,包括:稳态误差、稳定性、调节时间、超调量以及鲁棒性等方面的要求。控制算法常用的设计方法有:P I D 法、根
轨迹法、极点配置法、LQ 方法、模糊控制方法等[11,14]
。2.5 W eb QoS 控制系统举例
参考文献[11,15]给出了在Apache 服务器上,不同用户类相对延迟保证的反馈控制系统的实现,其中,文献[11]是在L inux 平台下Apache 服务器的控制系统,而文献[15]是在W in 2dows 平台下Apache 服务器的控制系统。以后者为例来说明。
如图3所示,该系统的被控制量y 是不同用户类平均的相对延迟之比,而控制作用u 是Apache 服务器的多处理模块(M P M )提供的工作线程之比,两者之间的关系可用下列二阶AR MA 方程来描述
y (k )+a 1y (k -1)+a 2y (k -2)=b 1u (k -1)+b 2u (k -2)(4) 在建立试验环境后,可用系统辨识方法确定参数(a 1,a 2,b 1,b 2)。然后,将图2控制器的控制算法取为比例-积分(P I )算法。参考文献[15]中给出了良好的试验结果。
3 发展方向
本文简述了W eb 服务器QoS 的测量技术和控制技术,这是测控技术领域中的一个新的研究方向,但目前仍处于初创阶段。今后在W eb QoS 的测量方面,要着重研究:
①如何产生具有自相似模型的突发性负载的请求序列;②如何配置W eb 上的文件,使文件集的尺寸分布、被访问的概率等符合W eb 在I nternet 网中的实际运行情况。
对于W eb QoS 的控制方面,要着重研究:
①W eb QoS 各种性能的反馈控制的建模方法;②有效的控制算法,特别是自适应控制、鲁棒控制和模糊控制算法等;
③建立试验床(test bed ),即按照W eb 的应用条件和外界环境,应用有关的W eb QoS 测量系统,搭建一个试验环境,以验证设计的正确性。参考文献:
[1] 欧灿辉,李晓明.W eb 服务器性能评测[J ].计算机研究与发展,
2002,39(5):540-547.
[2] Descri p ti on of the W ebSt one [DB /OL ].htt p://www .m indcraft .com /
W ebst one /,2005.[3] Trent G,Sake M.W ebSt one,the first generati on in HTTP server bench 2
marking[EB /OL ].htt p://www .m indcraft .com /W ebst one /paper .ht 2
m l,1995.
[4] Banga G,Mogul J C .Scalable kernel perf or mance for I nternet servers
under realistic l oads[A ].USEN I X Annu .Tech .Conf .[C ].New O rle 2ans,1998.
[5] Banga G,D ruschel P .Measuring the capacity of a W eb server under re 2alistic l oads [J ].World W ide W eb Journal,Special Issue on World W ide W eb Characterizati on and Perf or mance Evaluati on,1999.
[6] Cr ovella M E,Bestavors A.Self 2si m ilarity in world wide W eb traffic:
evidence and possible cause [A ].Pr oc .of 1996AC M SI G MET R I CS,I nt .Conf .on Measurement and Modeling of Computer Syste m s [C ].1996.
[7] W illiferW ,Paxs on V,Taqqu M S .Self 2si m ilarity and heavy tails:struc 2
tural modeling of net w ork traffic[M ].Chapman &Hall,1998.[8] Barf ord P,Cr ovella M.Generating rep resentative W eb workl oads f or
net w ork and server perf or mance evaluati on[A ].Pr oc .of ’98AC M SI G 2METR I CS[C ].1998.
[9] SPECweb99release 1.02user ’s guide [EB /OL ].htt p://www .s pec .
org/web99/docs/,2000208.[10] Hellerstein J L,D iao Y,Parekh S,Tibury D M.Feedback contr ol of computing syste m s[M ].W iley -I EEE,2004.
[11] Abdelzaher T F,Stankovic J A,Lu C,Zhang R,Lu Y .Feedback per 2
f or mance contr ol in s oft w are service [J ].I EEE Contr ol Syste m sMaga 2zine,2003,6:74-90.
[12] Abdelzaher T F,Shin K G .QoS p recisi oning with q contracts in W eb
and multi m edia servers [A ].Real 2ti m e System s Sy mposium [C ].
1999:44-53.
[13] Apache HTTP server versi on 2.2documentati on [EB /OL ].htt p://htt pd .apache .org/docs/2.2/,2006.
[14] D iao Y,Hellerstein J L,Parekh S .Op ti m izing quality of service using
fuzzy contr ol [A ].D istributed System s Operati ons and Manage ment
[C ].2002,42-53.
[15] 潘文平,慕德俊,张新家,张慧翔.相对延迟保证在Apache 服务器
上的实现[J ].计算机工程与应用,2006,42(29):129-132.□
(上接第80页)
3 结束语
视景仿真系统在实时显示仿真数据的同时收到了良好的动画演示效果,逼真模拟了飞机刹车的全过程,同时数据记录和视景回放功能又为观察者提供了再一次分析和评估仿真过程的机会。在飞机刹车半实物仿真系统引入可视化技术,增强了系统的表现力,随着计算机技术的不断进步,视景仿真必将成为仿真系统不可或缺的重要组成部分。参考文献:
[1] 和平鸽工作室.OpenG L 高级编程与可视化系统开发[M ].北京:中
国水利水电出版社,2003201.
[2] R ichard S .W right,S weet J M.OpenG L 超级宝典[M ].北京:人民邮
电出版社,2001206.
[3] 胡方.水声对抗三通道视景仿真系统研制[D ].西安:西北工业大
学,2004202.
[4] 李现勇.V isual C ++串口通信技术与工程实践[M ].北京:人民邮
电出版社,2004207.□
?
38?W eb QoS 的测控技术
试论A320飞机刹车系统的特点和常见故障
试论A320飞机刹车系统的特点和常见故障 发表时间:2019-01-03T11:47:07.707Z 来源:《基层建设》2018年第34期作者:刘洋 [导读] 摘要:刹车系统是现代民用航空器的制动装置。 北京飞机维修工程有限公司西南航线中心四川成都 610200 摘要:刹车系统是现代民用航空器的制动装置。它的可靠性对飞机运行安全具有极大关联。故此,文章以A320飞机为研究对象,展开对其具体系统研究,通过这几种对常见刹车故障现象的分析,阐述故障产生原因。 关键词:A320;飞机;刹车系统;特点;常见故障 1刹车系统简析 飞机的刹车系统相对复杂,其主要是由6个子系统构成,包括正常、备用刹车系统等,其中正常的刹车系统在具体的工作中,是在绿系统压力的支持下完成,而备用刹车系统在实际运行中,是在黄系统压力的支持下完成,一般绿液压系统压力优先。1.正常刹车。①人工刹车。飞机的刹车系统具备人工刹车,在需要刹车时,飞行员用脚踩脚蹬,脚蹬下方设置了能够感受压力,并将其转换为电信号,并发送到 BSCU,实现刹车动作,还可以实现对刹车压力的大小调节。②自动刹车。自动刹车同样是飞机刹车系统的关键部分,在不是着陆状态下,通过踩踏脚蹬能够实现减速。再借助收扰流板及脚蹬方向,可实现自动刹车。③空中刹车。当飞机起飞手起起落架时,由于轮胎的高速旋转,会打上轮舱中重要部件。因此把起落架手柄放置在UP位3秒钟后,直接将机轮自动。2.备用刹车。①带防滞人工刹车。机组踩脚蹬时,黄液压系统压力传至下游,并实现对刹车力的控制与调节,避免飞机发生抱死现象。②不带防滞人工刹车。如果BSCU发生异常情况,这种情况,则不可以对备用刹车进行利用,实际的刹车时,黄液压系统压力传至刹车组件开始刹车。 2系统原理 A320系列飞机刹车系统由正常刹车系统、备用刹车系统、停留刹车系统和空中刹车系统四个子系统组成。正常刹车系统使用绿系统压力,备用刹车系统使用黄系统压力,通过自动选择活门自动选择,绿系统压力优先于黄系统压力对系统提供工作压力。正常刹车系统与备用刹车系统各有一套独立的伺服活门和液压保险。正常刹车系统工作:绿系统压力经过正常选择器活门→自动选择活门→正常伺服活门进入各刹车装置,BSCU控制正常伺服活门开度进行防滞刹车。 备用刹车系统工作:黄系统压力经过自动选择活门→停留刹车操作活门→双向活门→双向往复活门→备用伺服活门进入各刹车装置,脚蹬信号由备用低压控制系统转变成机械信号,控制刹车双分配活门调节刹车压力大小。停留刹车工作:系统压力经自动选择活门→停留刹车操作活门→双向往复活门→备用伺服活门进入各刹车装置,停留刹车手柄直接电控停留刹车控制活门打开,使停留刹车操作活门保持开位。空中刹车在起落架手柄"UP"位3s后由绿系统供压进行刹车。系统核心(BSCU):控制并监控整个刹车系统的工作。BSCU接收刹车指令信号,打开或关闭刹车选择活门,完成对刹车指令的响应和刹车方式选择;同时还接收轮速信号以及ADIRU的大气数据等信息,调节刹车压力,控制轮速,按照预定的程序控制自动刹车,以达到最佳刹车性能的目标;并完成对系统监控和自检,向ECAM、CFDS发出提示和警告信息以及进行前轮转弯控制等功能。BSCU包括两个系统,一个工作,一个备用,交替工作。 系统原理见图1 3常见的刹车故障 1.系统检测的故障。BSCU可实现对整个系统的检测,在具体的工作中可实现对刹车压力、活门位置等的检测,并能够确认系统对指令的执行情况。如果,系统发生异常情况,BSCU可以实现对异常的检测,并发出相关报警信号与响应促使。并且,它可结合故障信息,实现自测试,并结合TSM排除故障。 2.单个主轮刹车温度不正常。在主轮工作过程中,如出现单个主轮温度异常,且高于其他轮,则说明该轮存在故障,且故障是伺服活门以后的部件故障可能性比较高。解决方法根据AMM手册更换部件。 3.停留刹车手柄控制失效。在刹车动作执行后,停留刹车不松开,三针表显示压力,可借助刹车动作判断信号是否异常或是是否发生故障。如果停留刹车失效,则需要换旋转电门。 4.刹车储压器的故障。刹车储压器是航空器液压系统的重要部件之一,该部件的好坏直接影响到航空器刹车工作正常与否。当检测到刹车储压器压力过低时,不要简单充气。需要依据手册进行检查判断后实施相应维护工作。对停留刹车储压器的压力检查时,应依据环境温度,参考表中给定的压力值,若压力差值小于218PSI,则正常充气至标准,若差值大于218PSI,则需要检查刹车储压器的充气口、接头以及总管有无渗漏。 4A320飞机刹车组件碳刹车片磨损分析与预防 1.碳刹车片磨损机理分析。①碳片之间的磨损。刹车制动时通过液压力的作用将力传给活塞,使活塞压在碳片上,从而使刹车动盘和静盘间产生摩擦力来实现的。随着飞机起落次数的增加,刹车使用次数的增多,刹车组件上的碳刹车片的磨损也加大,当碳刹车片达到完全磨损的程度,即刹车组件上的磨损指示杆伸出长度为零时,要求更换刹车组件,返修刹车组件,这种碳片之间的磨损属于正常磨损。②键和键槽之间磨损。刹车组件中的动片通过外部边缘上的槽被键接到机轮上,使得动片随机轮一起转动,那么键和键槽之间的间隙就是一个至关重要的参数。如果航线在更换轮子的时候,没哟及时发现刹车组件动片键槽间隙的加大和磨损,而继续使用,动片磨损就会越来越大,直至动片碎裂,这将导致严重的航空安全。 5常见故障分析及排故 停留刹车手柄控制失效停留刹车松不开,即三针表上有刹车指示。因为两边刹车压力传感器同时故障的可能性很小,可以通过对刹车装置的刹车作动筒检查来判断刹车故障是真实存在的或是信号指示有误。若检查发现刹车作动筒伸出,就可以判断故障源头应该是停留刹
VTD交通视景仿真轨道方面仿真应用的案例解析汇报汇报
VTD交通视景仿真_轨道方面仿真应用案例解析 概述 随着公路和轨道交通(以下简称轨交)的发展,视景仿真技术和轨交领域的结合也越来越紧密。越来越多的部门已开始研究三维视景技术在轨交仿真中的应用。研究领域包括驾驶模拟训练器,道路路况对驾驶的影响、汽车的主动安全仿真、以及列车控制系统和动力系统的运行仿真等方面。 传统的轨交仿真验证往往存在以下问题: ?显示结果不直观 传统的模型解算和分析结果往往是由一系列复杂的数据或图表,不能直观的表现出视景效果的影响。三维视景仿真可以直观展示仿真实验的可视化效果。 ?单纯视景仿真无法真实表现运动状态 单纯的视景可以较好的展现三维场景,但是仿真缺少有效的真实数据驱动,而且视景的精确度较低,无法通过视景完成精度要求高的安全辅助、舒适性体验、道路状况模拟等功能。动力学等方面的仿真数据也无法体现在视景展示中。所以单纯视景仿真的应用十分有限。?视景开发工作量大,运行不够流畅 为了保证精确度和便于仿真研究,道路/轨道的建立要遵循一定的标准。当列车或火车在路上高速行驶时,对视景的渲染效率要求很高,过于复杂的模型需要集群提供计算和数据渲染,造价高昂且意义不大。 解决方案:基于VTD的交通三维视景仿真应用 VTD—复杂交通环境视景建模、仿真软件。由德国的VIRES公司开发,主要针对复杂的实时交通环境实现视景仿真应用。除了传统的公路交通视景仿真,VTD还能很好的应用在轨交三维视景仿真中,目前VIRES已经在欧洲完成了大量公路、轨道方面的视景仿真项目,采用VTD作为三维视景开发及显示工具,以Concurrent或HiGale作为实时仿真平台。可实现驾驶模拟视景的专业开发,也可以应用在SIL、VIL、DIL、HIL等测试中,取得了很好的应用效果。本文主要介绍VTD在轨交三维视景仿真中的应用。
飞行模拟器视景仿真系统的优化设计与实现途径探索
飞行模拟器视景仿真系统的优化设计与实现途径探索 作者:白小亮 来源:《科技创新导报》2020年第09期 摘; ;要:飞行模拟器视景仿真是飞行训练中不可或缺的重要组成部分,作为真实天气现象、飞行情况的模拟,不仅能通过真实情境的模拟提升飞行训练内容的真实度,更能通过复杂教学情境训练飞行员的应激反应、复杂问题处理等相关技能,实现结果导向训练成效。因此,飞行模拟器视景仿真系统的功能设计和内容构成布局的合理与否,对于训练成效具有直接影响。本文就飞行模拟器视景仿真系统存在的主要问题提出优化设想,并在此基础上研究实现途径。 关键词:飞行模拟器; 视景仿真系统; 优化设计; 实现途径 中图分类号:TP391.9; ; ; ; ; ; ; ; ; ; ; ; ; ; ; 文献标识码:A; ; ; ; ; ; ; ; ; ; ; ; 文章编号:1674-098X(2020)03(c)-0002-02 视景系统是用来模拟飞行员的视野,将飞行器之外的包括气象等所有与飞行任务有关的景象全景式呈现在飞行员面前,帮助飞行员判断出飞机飞行的速度、位置、飞行高度、飞行姿态等,并根据计算机成像模拟飞行状况经多屏幕显示出来,帮助飞行员实现飞行训练的专门性系统。飞行模拟器视景仿真系统虽是模拟系统,但对飞行员的实际操作能力的养成提供了前期技能训练手段,因此对于飞行员专业素养的培养和飞行经验的成长具有重要意义。航空飞行是一个集气象、空中状况和地面状况为一体的复杂场景,因此飞行员的训练周期和培养周期相对较长。当前我国已经能够实现民用飞行模拟器自主研发,是世界上为数不多的具有自主研发能力的国家之一,为我国民用航空飞行员的培训和成长做出了突出的贡献。但从目前的视景仿真模拟设计来看,我们依然存在问题亟需优化和提升。本文就目前我国主流视景仿真系统存在的主要问题,提出优化设计设想和研究实现途径。 1; 当前我国飞行模拟器视景仿真系统存在的主要问题分析 1.1 视景仿真系统仿真的真实度和实时性不能同步兼顾,影响系统整体真实效果呈现 飞行模拟器视景仿真系统可为飞行人员训练时提供逼真的座舱外景象,能提供飞行任务中约70%的有用信息,因此视景系统的图像生成和显示质量直接影响到训练的效果。以气象仿真为例,当前的气象仿真技术的实现主要基于两种技术手段得以实现:一是根据仿真平台与OpenGL之间的联系,通过OpenGL在仿真平台中实现随机闪电模拟的可行性,仿真平台中将纹理映射技术与传统闪电渲染方法相结合实现随机闪电、雨雪模拟的可行性,能够满足民航飞
空客A320飞机更换机轮及刹车注意事项
空客A320更换机轮及刹车注意事项 深圳航空公司的空客A320飞机大部分选装了胎压指示系统,刹车风扇冷却系统,加之空客公司的设计理念过分保守,在很多部位使用双重保险,使我们的工作量增大,工作难度也提高了。我航线大多数员工无A320飞机维护经验,过站工作中机轮超标需更换时,难免手忙脚乱,可能会导致航班延误,给深航的声誉带来不利影响。未避免这种情况的再次发生,特总结一下换轮经验,给大家做个参考。 其实更换机轮的难度主要是附件的拆装,现据图详解如下(未选装胎压传感的可省略相关部分): 首先介绍一下主轮的附件,顺序由右至左: 1,风扇罩(22)——[螺钉(21),保险垫片(20)6个-需更换,或者不用更换的普通垫片]
2,冷却风扇(19)——[铜质紧固螺帽(24)-要注意力矩-保险丝保险,垫片(25)-注意方向] 3,环形防护罩(18)——(和风扇罩共用固定螺钉) 4,支架(16)-有定位销——[卡环紧固(15)-安装时注意方向,可节省时间] 5,轮轴大螺帽,垫片-注意方向——[大螺帽由两个小螺栓-螺帽保险,小螺栓-螺帽由开口销保险] 6,薄壁空心的轮速传感器驱动轴(31),非常脆弱,不可弯折。驱动轴伸出一端为花键结构,安装风扇罩时要非常小心,用油脂润滑驱动轴的花键和风扇罩的花键槽(23),并将花键槽套住花键。安装前检查花键和花键槽的磨损情况,键槽为铜质,不耐磨损,可导致轮速误差,导致刹车失效。 另外每个机轮组件的胎压传感器(下图10)通过保持套(上图4,下下图60)和轮毂气路结头连通,图示如下:
拆装胎压传感器时,要检查保持套封圈(50)状态,破损则更换。胎压传感器保持套不在位时接头处会持续漏气。 如果刹车温度允许设置停留刹车,设置停留刹车,以节省调整刹车片位置的时间,加快进度。 整个主轮的拆下顺序为: 风扇罩-胎压传感器保持套-环形保护罩-刹车冷却风扇-支架-轮轴大螺帽-主轮。 安装顺序相反。 力矩:前轮轮轴螺帽:第一次160.7磅尺,第二次80磅尺 主轮轮轴螺帽:第一次185-221磅尺,第二次110磅尺 打力矩时需转动轮胎。 安装完毕应检查胎压传感器保持套和轮胎充气阀处有无渗漏,检查下ECAM的LG 页面轮胎压力指示是否正常,检查刹车冷却风扇是否工作正常(有无鼓风)。 每更换一个主轮所需消耗件:
直升机虚拟飞行视景仿真系统设计
·制造业信息化· Design of Helicopter Virtual Flight Scene Simulation System WU Xue-Rong ,SU Bo (The First Aeronautical Institution of Air Force,Xinyang Henan 464000,China ) Abstract:Being based on the digital prototype of the helicopter,the helicopter flight dynamics performance simulation system is built from the point of view of the helicopter using.And the flight simulation is reproduced in the form of three-dimensional animation through stereoscopic projection system.The software is the core of the virtual simulation system,and it is responsible for the scene development,operation,and the formation,at the same time,it can connect and coordinate the system operating,so as to form a complete virtual reality system.Key words:helicopter ;simulation system ;flight scene 0引言 以数字样机为背景的计算机软件模拟仿真技术广泛应用于大型复杂武器装备的研发、设计、制造、使用和维护过程中,对装备全寿命周期的不同阶段,不同方面的重要技战术指标进行分析、评估和验证。与以物理样机为背景的模拟仿真相比,计算机模拟仿真具有安全性、经济性、超前性、灵活性、功能齐全等突出的优势。因此,计算机软件仿真逐渐成为模拟仿真的主要方法。直升机虚拟飞行视景仿真系统正是以直升机数字样机为基础,应用专业软件,从使用和维护的角度对直升机的飞行动力学性能进行模拟仿真,并通过立体投影系统以三维动画的形式再现仿真。系统的建成将在直升机理论教学、飞行仿真等方面发挥重要作用,具有显著的军事和经济效益。 1仿真系统的结构组成 系统由软件和硬件两部分构成如图1所示。硬件部分包括高性能计算机、虚拟现实交互设备和显示设备。硬件部分是软件系统运行的公共平台。软件部分包括三种不同功能的大型软件(开发平台),分别是用于沉浸式虚拟维修模块的DELMIA 、用于桌面式虚拟维修模块的 Ngrain 和用于虚拟飞行仿真模块的Flightgear ,是整个虚 拟现实系统的核心,负责整个场景的开发、运算、生 修稿日期:2012-11-25 作者简介:武雪荣(1978-),女,河南周口人,硕士,讲师。研究方向:军械装备的仿真与研究。 摘要:本仿真系统以直升机数字样机为基础,应用专业软件,从使用的角度对直升机的飞行动力学性能进 行模拟仿真,并通过立体投影系统以三维动画的形式再现仿真;软件部分是整个虚拟现实系统的核心,负责整个场景的开发、运算、生成,同时连接和协调整个系统的工作和运转,形成一个完整的虚拟现实系统。 关键词:直升机;仿真系统;飞行视景中图分类号:TP13 文献标识码:A doi:10.3969/j.issn.1002-6673.2013.01.040 文章编号:1002-6673(2013)01-102-03 直升机虚拟飞行视景仿真系统设计 武雪荣,苏波 (空军第一航空学院,河南信阳464000) 机电产品开发与创新 Development &Innovation of M achinery &E lectrical P roducts Vol.26,No.1 Jan .,2013 第26卷第1期2013年1月图1系统构成 Fig.1System structure 102
面向飞行模拟器的视景仿真系统
面向飞行模拟器的视景仿真系统 飞行模拟器训练是通过模拟真实飞行环境,满足初级飞行员飞行入门或者飞行员飞行恢复的必要功能训练,也是飞行特情处置演练的必备训练科目。高档的飞行模拟器中的某些功能模块,欧美等西方发达国家仍然对我国实行技术封锁和产品禁运。 在当前大力培养飞行员的过程中,存在飞行模拟器真实度不高,使得飞行模拟训练效果不佳等问题,在硬件技术逐渐被我国国产设备取代的情形下,能够模拟各种自然现象和各种飞行环境的视景仿真系统,由于开发难度大,技术门槛高等难点,迄今为止国内科研院所和企业都未能研制出来,一直依赖从国外进口,造成飞行模拟器价格奇高,二次开发系统限制多,而且也面临飞行员飞行数据泄露等问题,使得我国飞行模拟器的发展一直处于卡脖子状态,严重影响了我国飞行员的培训进程。 另一方面,由于当前的飞行模拟器存在单一的功能训练任务,而且飞行环境的逼真度不高,造成飞行员对飞行模拟器科目存在应付了事的状态,影响了飞行训练任务的落实。因此对飞行模拟器的升级改造甚至让飞行模拟器脱胎换骨,使得飞行模拟器不仅仅是飞行员对飞机座舱仪表操作的功能训练器,成为飞行员作战任务的想定推演的利器,进一步通过与真实飞机实现联网,达到与真实飞机同时进行虚实飞行对抗演练的工具,从而使得飞行模拟器真正成为飞行员的强大辅助工具。 北京大学与天津微视威信息技术有限公司联合开发的面向飞行模拟器的视景仿真系统,具有以下几个特点: 1.复杂环境实时渲染,具有模拟各种气象条件和自然环境的大于60fps高保真 场景渲染能力; 2.影像匹配实景化,具有高精度三维重建场景的快速重建与部署能力; 3.联网实时协同,具有全球场景数据库,适合联网发布,实现联网对抗和编队 飞行等作战训练; 4.复杂城市场景自动重建,具有大规模城市级三维真实感场景的自动重建; 5.完全自主知识产权的系统平台研发,可以满足各种模拟器的视景仿真系统的 二次开发需要。 本系统的创新性和先进性: 1.提出了一种影像匹配实景化技术,通过对地面三维复杂场景的快速高精度重
飞机起落架刹车系统工作原理和性能分析 【毕业作品】
BI YE SHE JI (20 届) 飞机起落架刹车系统工作原理与性能分析 所在学院 专业班级飞机结构修理 学生姓名学号 指导教师职称 完成日期年月
摘要 飞机的刹车系统是保证飞机安全快速可靠地着陆的重要部件,在飞机着陆地面滑跑阶段通过刹车装置将飞机的动能转化为热能,减小飞机着陆滑跑的距离,通过飞机刹车系统的防滑刹车功能是飞机在着陆滑跑时在不同的路面上都能提供最大的刹车力同时保证飞机滑跑时的航向稳定性。本文重点论述了飞机刹车盘的工作原理,及刹车盘常见故障和维修排除方法,以及一些常见问题的预防和维护方法。 关键词:飞机刹车盘,刹车效率,刹车材料
ABSTRACT Aircraft braking system is an important component that is to ensure the safety, quickly and reliably of aircraft landing. The brakes of aircraft convert kinetic energy of aircraft into heat energy and reduce the distance of the landing roll. The features of anti-skid braking system can provide the largest braking force and ensure stability of the course in the landing roll on the different road. .I n this paper discusses the brake and anti-skid braking control system. And some common methods of prevention and maintenance will be introduced as well. Key Words: aircraft brakes,braking efficiency, brake materials
飞机刹车系统
飞机刹车系统 1.防滑控制刹车的实质 万里飞行轮下始,刹车为您保平安。刹车系统是飞机起落装置的组成部分,是飞机安全运行必不可少的重要系统。随着飞机技术的进步,刹车系统的组成、工作原理、控制功能等也在不断的发展完善。 现代飞机刹车系统正常刹车都有机轮自动防滑控制功能,不仅仅是正常刹车,有些飞机的备份或应急刹车系统也有防滑控制能力。防滑控制刹车的主要任务是在保证安全前提下,发挥刹车能力,提高刹车效率,最大限度地缩短飞机着陆滑跑距离,同时减小轮胎磨损,延长机轮使用寿命,改善维护性,降低运营成本。 防滑控制刹车的实质就是充分利用跑道所能提供的最大摩擦因数(结合系数),如图1所示。 u 干跑道 湿跑道 冰跑道 最佳滑动量滑动量 图1 飞机刹车防滑控制基本原理示意图 刹车系统工作时通过不断地调节刹车压力,控制机轮转速,始终使机轮滑动量在最佳滑动量附近,这样飞机刹车距离最短,刹车效率最高。 2.机轮滑动量 刹车过程中实际运动状态既有滚动又有滑动,而滚动是主要的,机轮滑动量是度量机轮制动程度的一个参数,其定义是机轮对地面的相对滑动量,公式表示为:滑动量=1-轮速/地
速。当机轮滑动量为零时,轮速等于地速,机轮为纯滚动;当机轮滑动量等于1时,轮速为零,机轮刹死而完全滑动;一般地当机轮滑动量在0.1~0.3范围内时,地面摩擦系数u最大,提高地面摩擦系数(结合系数)是提高刹车效率,缩短滑跑距离的关键。 3.机轮打滑 当轮胎与跑道接触面间产生最大摩擦系数时所对应的滑动量成为最佳滑动量。当滑动量σ小于或等于最佳滑动量时为稳定滑动状态,如图1中虚线左侧所示,此时刹车力矩与结合力矩及机轮惯性力矩相互平衡,且结合力矩刹车力矩增大而增大。当滑动量σ大于时为不稳定滑动状态,如图1中虚线右侧所示,此时结合力矩逐渐减小,导致机轮迅速进入刹死状态,此即为机轮打滑或卡滞,一旦发生打滑现象,地面摩擦系数随滑动量的增加而迅速降低,进入恶性循环,这是应竭力避免的。 机轮打滑时一方面由于刹车力或摩擦力迅速减小,不能有效缩短滑跑距离,另一方面机轮轮胎会急剧摩擦或磨穿,有时会引起轮胎爆破,危及飞机安全。 4.湿跑道机轮打滑 湿跑道机轮打滑原因有两个方面。相较于干跑道,湿跑道所能提供的地面摩擦系数会减小,如图1所示。而飞机刹车力矩一般设计的足够大,以保证有足够能力刹停飞机。干跑道提供的最大摩擦力矩较大,能够平衡最大刹车力矩,所以系统把刹车压力调节到最大值附近;而湿跑道提供的最大摩擦力矩大大低于最大刹车力矩,系统工作在小的刹车压力下,系统性能降低。 其次,由于湿跑道与轮胎间的最大摩擦系数较小,维持机轮转动的结合力矩较小,湿跑道上仅能给机轮提供比干跑道小的旋转加速度,机轮回转力减弱,机轮从深打滑中恢复时间加长,导致系统性能进一步恶化。 5.不同刹车方式的使用技巧及减速效果 为了算短着陆距离,民用飞机可使用包括减速板、发动机发推力装置,刹车装置等的多
毕业设计 飞机刹车系统常见故障和维修技术
陕西航空职业技术学院 毕业设计(论文)说明书 机电工程系航空机电设备维修专业 毕业设计(论文)题目飞机刹车系统常见故障 和维修技术 学生姓名吝渭阳学号10571-21 指导教师李瑞峰职称助理工程师
2012 年06 月05 日 毕业设计(论文)任务书 机电工程系航空机电设备维修专业 学生姓名吝渭阳学号10571-21 一、毕业设计(论文)题目飞机刹车系统常见故障和维修技术 二、毕业设计(论文)时间2012 年06月05日至2010年12月 三、毕业设计(论文)地点:陕西航空职业技术学院 四、毕业设计(论文)的内容要求: 1、论文中包含具体实例,理论知识和相关图表并存; 2、字数不少于8000字; 3、论文内容及格式按要求完成。
指导教师年月日 批准年月日 摘要 本论文主要阐述了某型飞机起落架设计改进及制造技术。改进后的起落架经试验及预先飞行验证,各项指标符合要求,满足了新研飞机的使用需要,并在此基础上,针对性地提出了预防措施。为了提供飞机主起落架放下位置锁检测夹具试验所需的载荷,设计了液压传动系统,并对液压传动系统中的关键元器件如液压泵、加载作动筒、减压阀等进行设计计算和合理选型,使用结果表明:所设计的液压传动系统作用在夹具试验台中的效果完全满足《飞机大修指南》中规定的诸如密封性检查、可靠性检查和磨合试验等试验要求。 关键词:飞机刹车系统故障分析预防措施前起落架自动收起液压系统检测夹具液压传动液压导管漏油缺陷无损检测节能设计实体剖分姿态误差油量测量计算仿真三维造型污染控制重心位置重心前限重心后限油量传感器设计小波分析法飞机燃油系统故障检测与诊断
基于MFC和VegaPrime的无人机三维视景仿真实现
基于MFC 和Vega Prime 的无人机三维视景仿真实现 丁梦雨 , 芦利斌 , 金国栋 (第二炮兵工程大学907教研室,西安710025) 关键词:无人机;Creator 建模;Vega Prime ;MFC ;视景仿真 收稿日期:2013-06-14 修稿日期:2013-07-15 作者简介:丁梦雨(1989-),女,黑龙江哈尔滨人,硕士研究生,研究方向为无人机地面控制站 利用Multigen Creator 建立无人机和地形场景模型,通过Vega Prime 来驱动视景系统,实现 一个基于MFC 的可视化无人机三维视景仿真实验平台,对无人机的飞行过程进行实时描绘,良好地再现无人机自主飞行时的飞行姿态。通过无人机试飞实验证明,该视景仿真系统取得比传统视景系统更好的效果。 摘 要:文章编号:1007-1423(2013)23-0085-05DOI :10.3969/j.issn.1007-1423.2013.23.023 0引言 近年来,无人机在民用和军事领域都发挥着越来 越重要的作用。随着无人机飞行功能的日益完善,使得其飞控系统日趋复杂化,这就需要采集大量的数据。通常无人机地面站的数据回显功能主要由参数来直接显示,这样不够直观,对于非专业操作人员来说,无法快速直观地读取无人机的飞行状态。同时,无人机飞行实验具有高风险、高成本的特点,因此,开发一个能够满足无人机试飞实验的三维视景仿真系统,具有其特殊意义和重要性。无人机三维视景仿真是利用三维图像来实现无人机的飞行过程,实时地再现其飞行状态。操作人员通过观察三维仿真视景中无人机的飞行姿态,可以直接判断出无人机的飞行状态,这样就大大减少操作人员的工作量。三维视景仿真是在虚拟现实技术的基础上,综合计算机、图像、计算机交互及数据传输等技术进行可视化显示的一个重要技术,它能够实时动态地再现无人机飞行全过程,为今后研究无人机整个运动过程提供直观易懂的事实依据。 1三维视景仿真环境简介 1.1Creator 建模环境 Creator 是Multigen 公司创建的一个实时仿真建模软件,它拥有独创的用于描述三维虚拟场景的层次化数据结———OpenFlight 数据结构。这是一种树形的层次化结构,采用这种结构主要基于两点考虑[1]:一是这种结构可以方便地将模型按照几何特性进行有效地组织,并将其转化为能够方便地进行编辑和移动的节点的形式;二是这种树形结构非常适合实时系统进行各种遍历操作。其中,所谓的节点(node )就是建构层次化模型数据库最基本的元素或模块。利用Creator 构造出的模型能与实时仿真软件紧密结合[2]。 Creator 主要包括两个窗口:应用程序窗口和数据库窗口。Creator 的大部分工作都是在应用程序主窗口内的模型数据库窗口中进行的,用户可以使用Creator 的工具条、建模工具或者菜单命令,在数据库窗口内完成创建模型、调整视图、编辑模型等多种操作[1]。 1.2Vega Prime 视景仿真环境 Vega Prime 是Multigen 公司推出的最新虚拟现实开发工具,具有面向对象、功能强大、界面友好、平台兼容性好等特点。它是一个进行实时仿真和虚拟现实开发的高性能软件环境和良好工具[3],能高效地创建和配置视景仿真、基于仿真的训练、通用可视化等应用程
空天一体化视景仿真关键技术研究
小型微型计算机系统Journa l o f Ch i nese C om puter Sy ste m s 2010年11月第11期V o l 31N o .112010 收稿日期:2009 08 28 基金项目:国家"八六三"高技术研究发展计划项目资助. 作者简介:郭栋梁,男,1983年生,博士研究生,研究方向为计算机图形学、虚拟现实;聂俊岚,女,1964年生,博士,教授,研究方向为虚拟现实;王艳芬,女,1982年生,硕士,助理实验师,研究方向为虚拟现实、计算机图形学;孔令富,男,1957年生,博士生导师,教授,研究方向为计算机智能控制、机器视觉. 空天一体化视景仿真关键技术研究 郭栋梁,聂俊岚,王艳芬,孔令富 (燕山大学信息科学与工程学院,河北秦皇岛066004)E m ai:l dong li an g1005@https://www.360docs.net/doc/2e4680610.html, 摘 要:针对空天场景中仿真实体坐标系难以组织,通过研究空天场景坐标系的一般关系树,提出基于V ega Pr i m e 的坐标系关系树组织结构;通过设计观察目标到视点距离和视域远近裁减面的函数对应关系,解决了空天场景中由于实体尺寸差别悬殊带来的展现失真问题;对气象环境加入区域约束,根据视点位置确定当前气象环境效果,实现空天场景多环境的展现.设计K T SG 系统,实现了空天一体化场景的逼真显示. 关键词:空天一体化;视景仿真;多坐标系管理;多气象环境 中图分类号:T P391 文献标识码:A 文章编号:1000 1220(2010)11 2255 05 Research on K ey T echnologies of Scene Si m ulation AboutA erospace Integration GU O D ong liang,N IE Jun lan ,W ANG Y an fen ,KONG L ing fu (In f orma tion Science and En gi n eeri ng In stit u te,Yanshan Un iversity,Q i nhuangdao 066004,Ch i n a ) Abstrac t :A no ve l organizati o na l structure o f coo rd i nate s h i e rarch ical tree t ha t base on V ega P ri m e w as propo s ed ,ai m i ng a t o rg an i z i ng the si m ulation entities i n aero s pace .A nov e l functi o n w as desi gned ,w h i ch is com po sed o f t he d istance bet w een targ et and o b serv er ,t he near c li ppi ng p l ane ,and t he far cli pp i ng plane .Succe ssfull y preven t the prob le m o f d is p l ay d isto rti on .The m ulti env iro n m ents w ere disp l ayed i n aero space scene ,buil ding on addi ng reg ion re str i c t to m eteo ro log i ca l env i ron m en.t Currentm eteo ro log i ca l en v i ron m ent w as cho se acco rd i ng t o t he po siti on o f v ie w er .K T S G syste m w as designed ,ex ac tl y d isplay i ng t he s pace scene .K ey word s :aero s pace i nteg ra tion ;scene si m ulati on ;m u lti coo rdi na t e sm anagem en ;t m ulti m eteo ro l og i ca l env iron m ent 1 引 言 空天场景是包含航天平台、临近空间平台、航空平台和地面环境一体化结合的三维场景,具有范围广、气象环境多样、实体描述复杂等特点.有效地组织三维空天场景,实现不同空间平台实时逼真地展现,在空间探测、空天虚拟战场仿真、三维游戏等方面都有着极其重要的研究意义. 作为M u lti g en Parad i gm 公司推出的支持面向对象技术的实时视景驱动软件,V eg a P ri m e 具有展现效果逼真、配置灵活、扩展模块丰富等特点,在航空航天、虚拟战场、工业仿真等诸多领域得以广泛地应用.对于空间局部区域的视景仿真,使用其自带的场景配置工具L ynx P r i m e 就能很容易地实现.然而,由于空天场景的特点,V ega Pr i m e 实现空天视景仿真会遇到如下问题: 1)描述仿真实体的坐标系各式各样.例如卫星等航空飞行器一般使用地心惯性坐标系,飞机等近地飞行器一般使用大地坐标系,而车辆、房屋等地面物体使用的却是当地坐标系.多种坐标系难以管理. 2)实体尺寸比例相差很大,如卫星、飞机尺寸等只有米数量级,而地球半径、卫星轨道半径都在数千公里甚至更高数量级,不考虑尺寸因素会产生定位精度问题和Z fighting 现象; 3)场景范围广,气象环境复杂,同一场景下不同区域不同环境的展现效果难以很好地展现,难以实现多角度、全方位观察整个空天场景. 目前对于近地平台,只对局部区域进行视景仿真[1 3];对于航天、临近空间等单一平台,通常采用非真实比例,即缩小地球和卫星半径尺寸比例进行视景仿真[4 5].无法满足既包含航空平台、临近空间平台、航天平台、又包含局部精细地形区域的空天一体化真实场景的视景仿真要求.本文从多坐标系管理、视域远近裁剪面控制和多气象环境管理等方面入手,研究如何在V ega Pr i m e 中实现真实比例、高逼真度的空天场景展示. 2 空天场景下多坐标系管理 三维场景通常采用对笛卡尔坐标系进行平移、旋转、缩放等操作来组织场景图[1],而对于空天三维场景,一部分仿真实体的位置和姿态使用笛卡尔坐标系进行描述,而其他许多仿真实体是在大地等地理坐标系中进行描述的[6,7].通过对空天仿真实体定位方式的研究,总结空天场景坐标系之间的关系,如图1所示,图中椭圆表示各种不同的坐标系,大写字母表示不同坐标系下的转换矩阵.实体本体坐标系是真正绘
飞行模拟器视景仿真毕设论文
摘要 随着飞行训练的成本越来越高,培训机构急需能够部分替代实际飞行训练的飞行模拟器进行飞行模拟训练,以有效地减少飞行训练的成本,提高飞行训练的效果。飞行视景仿真是飞行模拟器的一个重要组成部分,建立飞行视景仿真系统,不仅可以降低其研制和开发的费用和周期,减少各种飞机机体实际内部故障或者不可预见的复杂飞行环境导致的可能性故障,还可以向飞行人员模拟出真实的三维场景及有效的飞行信息,提供逼真的飞行效果与飞行姿态,使得培训人员可以更快速更安全更熟练地进行各种飞行操作设备,顺利完成各种飞行任务操作以达到培训目的。 本文在分析飞行仿真的需求基础上,设计的飞行模拟器可以较好地完成飞行仿真功能,提供多种飞行训练场景,有助于飞行技术的提高和飞行体验。在飞行仿真的理论基础上,借助相关的可视化技术,综合运用模型构造、系统运行、模型驱动等一系列技术,利用Creator软件进行仿真建模,完成飞机、飞行场景的建模,设计基于Vega Prime环境的飞行视景仿真系统,实现动态在线飞机飞行运动的全过程,为飞行训练提供良好的飞行仿真环境。本系统可以建立虚拟飞行训练环境,能有效的完成基本的飞行条件,提供多种飞行场景方案,但同时也有控制功能较少,场景较为单一的缺点,待后续技术条件成熟时进一步的完善与提高。 关键词:视景仿真;Creator;Vega Prime;虚拟
飞行模拟器视景仿真系统的设计与实现 Design and Implementation of flight simulator visual simulation system Abstract With the increasingly high cost of flight training in urgent need of training institutions to a partial substitute for the actual flight training, flight simulator flight simulator training to effectively reduce the cost of flight training, flight training effect. Flight simulation is an important part of the flight simulator, flight visual simulation system, to establish not only to reduce its research and development costs and cycle, to reduce a variety of airframe internal fault, or lead to unforeseen complex flight environment the possibility of failure, but also to the flight crew to simulate the real 3D scene and flight information, provide a realistic flying effect and flight attitude, making training faster, safer and more proficient in a variety of flight operations equipment, the successful completion a variety of mission operations in order to achieve the training objectives. In this paper, the demand on the basis of the analysis of flight simulation, the design of the flight simulator can be better to complete the flight simulation capabilities, providing a variety of flight training scenarios, contribute to the improvement of flight technology and flight experience. Based on the theory of flight simulation with visualization technology, and integrated use of a series of model construction, system operation, and model-driven technology, Creator software for modeling and simulation, complete aircraft, the flight scene modeling, design-based flight of the Vega Prime environment visual simulation system, the dynamic online airplane flight movement for flight training, flight simulation environment. This system can create a virtual flight training environment, the completion of the basic flight conditions, and offers a variety of flying scenes program, but we also have less control functions the shortcomings of single scene until the follow-up technical conditions are ripe to further improve and enhance . Key Words:Visual Simulation;Creator;Vega Prime;Virtual
基于模式的视景仿真系统的构建与实现
基于模式的视景仿真系统的构建与实现 随着计算机软、硬件技术的发展与成熟,仿真模拟技术在各大领域均得到了广泛的应用和发展,视景仿真便是其中的一种。某军用电台虚拟仿真系统正是基于这一背景而提出的,包括视景仿真系统、电路仿真系统和故障库三部分。其中,视景仿真系统是整个系统最重要的部分,它通过对电路仿真结果和故障库的功能调用来实现电台整机和板卡器件及其电路波形的展示。本文以某新型军用电台为研究对象,围绕“无缝视景展示”和软件板卡级扩展的核心功能及要求,在借鉴软件设计模式的基础上,结合数据库技术、视景渲染引擎技术、MFC 面向对象设计方法设计了虚拟电台视景仿真系统的总体结构并对其 实现方法进行了描述。首先,本文阐述了软件设计模式和软件体系结构的相关概念,并重点分析比较了两种常用的交互式系统体系结构模式--MVC模式和PAC模式。通过对比研究,本文选择了MVC体系结构模式作为本视景仿真系统体系结构设计的依据。其次,总结了交互式视景仿真软件和传统的交互式软件的异同点。根据前者独有的特点,对传统的MVC模式进行改造,并裁剪掉OGRE图形渲染引擎在本仿真系统中不必要的功能,之后将其封装成为OGRE视景渲染中间件。据此提出并设计了基于MVC设计模式和视景渲染中间件的视景仿真系统软 件体系结构。第三,根据该军用电台视景仿真系统的功能需求,完成了对本视景仿真系统的组件划分(模型组件、视图组件、控制器组件和视景渲染中间件),给出了各个组件的功能、职责及各组件之间的协作关系。之后,结合设计模式的理念,设计并实现了各功能组件。最后,
给出了虚拟电台视景仿真系统的仿真流程,完成了视景仿真系统的设计实现,并展示了虚拟电台视景仿真系统的运行实例。此后,依据软件开发流程对本电台视景仿真系统进行了系统功能测试。测试结果表明该系统各项功能指标满足软件需求中所要求的功能项。如今,在该体系结构下完成的虚拟电台视景仿真系统已应用于合作方的日常教学和训练中。截至目前,合作方对此系统反应良好。