一种基于Wi-Fi的井下人员精确定位算法研究
一种基于Wi-Fi 的井下人员精确定位算法研究
张志强
摘要:简单分析了基于RFID 的人员定位技术、基于到达时间差TDOA 的定位技术以及基于接受信号强度RSSI 的定位技术。在此基础上针对煤矿井下巷道的特殊环境,提出了一种基于两点定位的井下人员精确定位算法。通过实地模拟实验得出该算法的定位误差基本控制在2-3m 之内。
1.引言
近年来,尽管国家下令关停并转了相当一部分中小煤矿,但是煤炭领域的灾难事故的发生频率一直有增无减,煤矿安全状况着实令人担忧。就目前来看,我国煤矿安全普遍存在的主要问题是井上管理人员不能及时与井下工作人员进行即时的信息交流,不能实时掌握井下人员的分布及工作情况,不能进行人员的精
确定位[1]。特别是在一些突发事故中无法确定井下人员的确切位置不能及时的制定出切实有效的救援方案,从而导致人员伤亡数目的增加。因此如何实现井下精确人员定位的研究在现在和将来的煤矿行业中具有重大的意义。
2.现有算法比较
2.1 基于RFID 的定位技术
目前,以RFID 为核心的井下人员定位技术是现在地下矿山人员定位技术的主流。该技术已经经过实际验证,基于RFID 的人员定位系统达到了预期的目的,满足了实时掌握下井人员的动态分布及安全管理的需要,可实现考勤管理及快速
指导矿井突发事故的救援工作[2]。但是从定位结果上来基于RFID 的人员定位技
术本质上是属于区域定位,如图1所示,地面上的管理人员只能知道随身携带射频标识卡的工人甲和工人乙处于读卡器A 和读卡器B 之间,但具体在什么位置就不得而知了。
2.2 基于TDOA 和RSSI 的定位技术
现有的基于Wi-Fi 的精确定位技术中最常见的就是基于到达时间差TDOA 和基于接收信号强度RSSI 的定位技术。
2.2.1 基于TDOA 的定位技术
基于到达时间差TDOA 的定位技术其原理为:射频标识卡同时发射两种不同传播速度的无线信号,无线基站(无线接入点,Access Point ,以下简称AP )根据两种信号到达的时间差以及已知这两种信号的传播速度,计算射频标识卡和AP 之间的距离,同样的道理得出至少三个AP 和射频标识卡之间的距离,再通过三边测量法或极大似然估计法确定射频标识卡的位置[3]
。通常射频标识卡都是采用发射无线射频信号和超声波信号,AP 记录两种信号到达的时间1T ,2T ,
已知无线射频信号和超声波的传播速度为1c ,2c ,那么AP 和射频标识卡之间的距离为:
S T T d ?-=)(21 (1) 其中:
2
121c c c c S -=
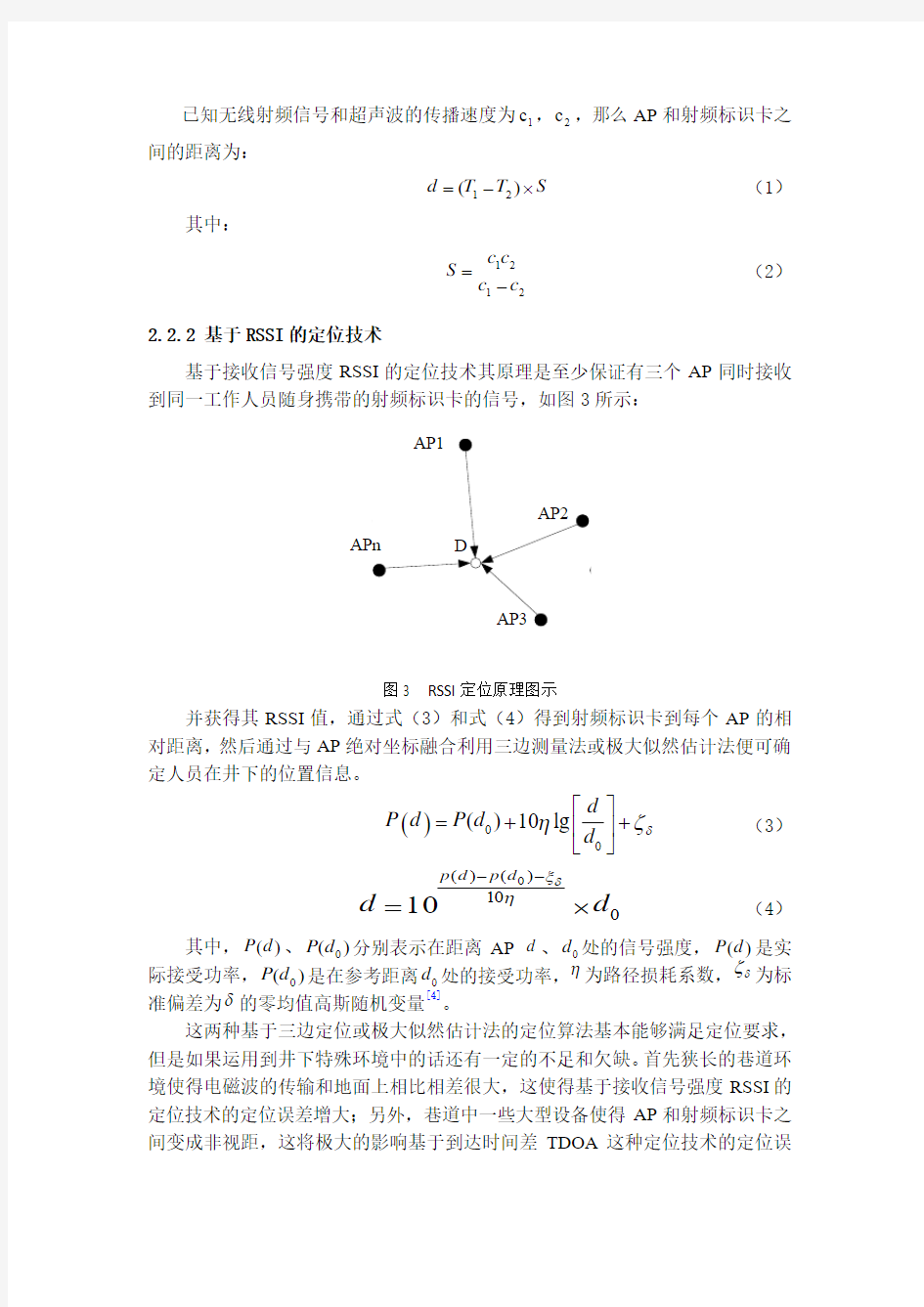
(2) 2.2.2 基于RSSI 的定位技术 基于接收信号强度RSSI 的定位技术其原理是至少保证有三个AP 同时接收到同一工作人员随身携带的射频标识卡的信号,如图3所示:
图3 RSSI 定位原理图示
并获得其RSSI 值,通过式(3)和式(4)得到射频标识卡到每个AP 的相对距离,然后通过与AP 绝对坐标融合利用三边测量法或极大似然估计法便可确定人员在井下的位置信息。
()00()10lg d P d P d d δηζ??=++????
(3) 010)()(010d d d p d p ?=--ηξδ
(4)
其中,)(d P 、)(0d P 分别表示在距离AP d 、0d 处的信号强度,)(d P 是实际接受功率,)(0d P 是在参考距离0d 处的接受功率,η为路径损耗系数,δζ为标
准偏差为δ的零均值高斯随机变量[4]。
这两种基于三边定位或极大似然估计法的定位算法基本能够满足定位要求,但是如果运用到井下特殊环境中的话还有一定的不足和欠缺。首先狭长的巷道环境使得电磁波的传输和地面上相比相差很大,这使得基于接收信号强度RSSI 的定位技术的定位误差增大;另外,巷道中一些大型设备使得AP 和射频标识卡之间变成非视距,这将极大的影响基于到达时间差TDOA 这种定位技术的定位误
差;同时这两种定位算法都必须保证至少有三个AP 同时接收到同一工作人员随身携带的射频标识卡的信号,这使得巷道中AP 的数量将大大增加,同时给井下组网带来了很大的麻烦,从而导致经济上的负担加重以及无线资源的严重浪费。
3.精确定位算法的设计
所谓巷道是指服务于地下开采,在岩体或矿层中开凿的不直通地面的水平或
倾斜通道[5]。如图4所示,由于巷道的长度也就是X 轴的距离长达几百米甚至几千米,而其直径也就是Y 轴的距离不过4-5m ,考虑到这种巷道特有的环境,所以这里可以忽略Y 轴的定位误差,只考虑X 轴的定位情况就可以判断工作人员在井下巷道中的具体位置。
针对以上这种思想以及第2节中定位技术的不足和缺点,本文在此基础上提出一种基于两点定位的井下人员精确定位算法。
1)由于GIS 技术可以把地图这种独特的视觉化效果和地理分析功能与一般的数据库操作集成在一起。所以人员定位算法可以结合GIS 技术,首先在GIS 地图中AP 1和AP 2之间标定一个采样点,然后工作人员随身携带的射频标识卡在实际巷道中和地图中相对应的位置点发送射频信号,AP 1和AP 2分别接收到标识卡的信号强度值RSS 1和RSS 2,同时把GIS 地图中标定的采样点的坐标值信息一并发送到数据库中作为样点,下一次当AP 1和AP 2接收到该标识卡的信号强度值与数据库中的信号强度值比较,通过最佳匹配算法本文采用求信号强度均方差得到结果最小的那一个,就判定该用户所在的位置点坐标为数据库中该样点所在的位置点的坐标()a a y x ,。
2)为了减少巷道狭长的空间这种特殊环境对射频信号传播的影响,以及GIS 地图带来的误差,在这里考虑到相邻AP 所处的巷道环境差别不大,其衰减因素大致可以认为是相同的。所以可以利用相邻AP 接收到工作人员随身携带的射频标识卡的信号强度的比值作为计算标准。根据信号强度的比值计算出用户到相邻AP 之间的距离的比值,AP 之间的距离已知故可以通过距离比值和数据库中AP 的坐标算出用户的坐标。
如图4所示,AP 1、AP 2的坐标已知为()11,y x 、()22,y x ,用户坐标为()y x ,,AP 1到AP 2之间的距离已知为d ,d 1、d 2分别为用户到AP 1、AP 2的距离。则有:
()()δξη+???
? ??+=0101lg 10d d d P d P (5)
()()δξη+???
? ??+=0202lg 10d d d P d P (6)
设R 为d 1和d 2的比值,则有:
ηδδηξηξ10)2()1(020********
10)()(010)()(21d p d p d d d d R d p d p d p d p -=??==---- (7)
可以得到: ()()()()???????-+-=+=-+-=+=2
222221211111y y x x d R d y y x x d R R d (8)
通过上式可以得到用户坐标 ()b b y x ,。
3)最后通过对1)和2)所得到的坐标值取算术平均,
()??
? ??++=2,2,b a b a y y x x y x (9) 最后得到的()y x ,便为最终用户的坐标值。
4. 精确定位算法的性能评估
为了验证算法的性能,进行了一系列的实地模拟实验。以Ruckus AP 为硬件平台,如图5所示,在一个长23m ,宽3m 的走廊中布置两个AP ,AP 放在高约1.0 m 的凳子上,两个AP 之间每隔2m 标定一个采样点,一位携带射频标识卡的工作人员在两AP 之间移动。
5.结论
介绍了一种基于Wi-Fi 的井下人员精确定位算法,解决了以RFID 为核心的井下人员定位技术的简单的区域定位问题,基本解决了基于到达时间差TDOA 和接收信号强度RSSI 的定位技术中电磁波传输以及AP 和射频标识卡之间非视距的问题,同时也解决了这两种算法带来的AP 数量庞大和组网困难的问题。通过实地模拟实验得到基于这种精确定位算法的定位误差基本控制在2-3 m 之内。
[参考文献]
[1]史大伟,何继兰. 煤矿井下人员定位系统关键技术探讨[J]. 煤矿机械,2010.
[2]郭韡,李郴. 煤矿井下人员定位系统的现状和发展[J]. 江西煤炭科技,2008.
[3]孙利民,李建中. 无线传感器网络[M]. 北京:清华大学出版社,2005.
[4]胡文鹏. 一种基于RSSI 的无线传感器网络定位算法设计与实现[D]. 吉林大学硕士学位论文. 吉林大学图书馆,2009.
[5] https://www.360docs.net/doc/245087428.html,/view/67583.htm.
井下精确定位系统可行性研究报告
井下精确定位系统可行性 研究报告
一、义煤集团目前存在的问题 1、矿用电机车 煤炭生产过程中,矿用电机车是井下轨道煤炭运输及辅助运输重要的动力设备,电机车按供电方式分为架线式和蓄电池式两种,轨道数量有单轨道和双轨道两种。由于电机车具有结构简单,维护方便,运输费用低等特点,在煤矿水平巷道中,作为运输工具起着很大作用,得到广泛应用。为确保煤矿井下运输安全,《煤矿安全规程》对电机车运输的轨距、轨型、运行速度、机车的制动距离以及两台机车在同一轨道同一方向行驶时,必须保持不小于100m的距离等做出了明确的规定。 由于煤矿井下运输巷道沿途灯光昏暗,工况恶劣,如果电机车司机注意力稍有不集中,反应迟钝,观察判断失误以及道岔错位等原因,电机车很容易出现事故,轻者掉轨,误开到其它轨道上,重者使两电机车行驶到同一轨道上造成迎面相撞或追尾事故,特别是迎面相撞事故由于极大的惯性,造成的后果更加严重。可能会损毁轨道、路基、车辆和运送的设备,甚至会造成冒顶塌方、火灾瓦斯事故。若是运送人员的车辆相撞后果更为严重,将造成大量人员受伤。而目前电机车的制动一般都是人工操作电阻制动和手闸制动两种,刹车时易产生剧烈抖动或刹车过猛而造成人为事故。这种机车相撞事故一旦发生危害巨大,后果惨重,极大地影响了煤矿企业正常有序的安全生产。 除电机车之间出现碰撞事故外,电机车撞人事故也常有发生。长期以来大巷机车运输事故在主巷运输事故中所占比例一直较大,其发生的类型一般有以下几类:①大巷作业人员避让列车不及被碰挂致伤;②大巷人行道宽度不够,使巷道内人员无法安全避让列车,被列车碰挂致伤;③无乘车候车室的大巷,下班后候车的工人因劳累睡在线路旁,被列车碰挂致伤;④乘车人员乘坐人车时,未挂好防护链且因劳累睡着后,意外被列车甩出车外摔伤;⑤跟车工摘挂钩时,因与司机联络失误或机车司机操作失误,兑车不当,被挤碰致伤;⑥行人在从石门巷道快速跨越大巷轨道时,被运行中的列车碰伤等。 要消除以上事故,一是要完善巷道设施;二是职工要做好自我保护;更重要的是要在完善机车安全设施,主动做好大巷行车安全防范工作。 2、人员定位 煤矿安全生产事关煤矿系统人员的生命和财产安全,各级政府一贯高度重视煤矿安全生产问题,并采取了一系列措施不断加强安全生产工作。通过不断
井下人员定位概述
井下人员定位概述 我国煤炭产量居世界首位,煤矿数量超过世界上其他要紧产煤国家的煤矿总数,煤炭行业是我国国民经济和社会进展的支柱产业。安全是煤炭生产的头等大事,安全对煤炭生产起着保证、支撑和推动作用。近年来,国家针对煤矿安全咨询题采取了多方面的有力措施,但由于长期以来煤矿安全投入明显不足,煤矿企业安全装备严峻缺乏,安全治理手段极其落后,国家煤矿安全形势仍旧十分严肃。因此,加大煤矿安全投入,推广采纳先进的煤矿安全装备与手段已成为煤炭行业迫在眉睫的必定需要。 煤矿安全最重要的是保证矿工生命的安全,煤矿安全治理最重要的也是对矿工安全的治理,其中对矿工在井下工作位置的准确监测是实现保证矿工安全目的的差不多前提。为此,国内外专门多企业投入大量精力,纷纷研制出一批针对井下人员的考勤定位系统,但从技术和性能等各方面都存在专门多咨询题和缺陷,不能满足对井下人员位置准确监测的要求。 针对现代矿井生产企业迫切的安全治理与人员治理需求,西安凯虹电子科技有限公司应用最先进的射频识别与无线监控技术,历时5年半,潜心研制出国际领先的井下目标定位跟踪系统——KJ133型矿用人员定位安全治理系统。该系统的明显特点是可实现井下各种巷道条件下的信号“全覆盖”,实现对井下人员、车辆、设备等目标的“全程的、实时的、连续的、精确的定位跟踪”,同时实现对井下人员的“实时双向无线通讯”。该系统的应用,可极大提升矿井生产企业安全生产治理水平。目前,公司产品已成功应用于神华集团神东煤炭分公司、铁法煤业集团、阳煤集团、鹤壁煤业集团、澄合矿务局等国有大型煤矿企业,并得到用户一致高度认同,为煤矿企业的日常生产调度、安全监管与应急救援等信息化治理工作提供了重要的有力保证。 2、系统总体方案
隧道人员精确定位方案2020
隧道人员精准定位方案(精度小于0.5米) 北京华星北斗智控技术有限公司 2020年3月
目录 一、技术先进性简介 (3) 二、定位原理 (4) 三、系统拓扑图 (5) 3.1、网桥传输模式 (5) 3.1、有线传输模式 (7) 四、定位系统功能介绍 (8) 4.1、精确的定位功能 (8) 4.2、自动考勤统计功能 (10) 4.3、轨迹回放功能 (12) 4.4、一键呼救功能 (13) 4.5、电子围栏功能 (14) 4.6、标签基站管理功能 (16) 4.7、长时间静止报警功能 (17) 4.8、气体检测功能 (18) 4.9、LED投屏功能 (21) 五、定位基站的供电 (22) 六、定位标签的供电 (23) 七、定位基站的安装 (24) 八、定位基站参数 (27) 九、定位标签参数 (30) 十一、项目案例 (33) 2
一、技术先进性简介 华星智控隧道人员定位管理系统采用我司具有自主知识产权的UWBLOC技术,该技术基于无线脉冲通信原理实现定位,UWBLOC技术利用纳秒至微秒级的非正弦波窄脉冲传输数据。通过在较宽的频谱上传送极低功率的信号,UWBLOC能在300米左右的范围内实现数百Mbit/s至数Gbit/s的数据传输速率。 UWBLOC技术抗干扰性能强,传输速率高,系统容量大发送功率非常小。UWBLOC系统发射功率非常小,通信设备可以用小于1mW的发射功率就能实现通信。低发射功率大大延长系统电源工作时间。而且,发射功率小,其电磁波辐射对人体的影响不到手机千分之一。 UWBLOC隧道人员定位系统定位精度最高可以做到10厘米,毫秒级的延迟实时显示人员的位置,可以实现隧道内的2维或1维精确定位。 UWBLOC系统信号几乎不对工作于同一频率的无线设备造成干扰,信号具有极强的穿透能力,可在室内和地下空间比如隧道、管廊等进行精确定位,相比于GPS卫星定位系统只能工作在露天环境,在定位卫星的可视范围之内;UWBLOC定位系统可以实现室内室外的精确定位,部署更为方便价格更为便宜。 3
煤矿人员定位系统技术方案.doc
xxxxx煤矿人员定位系统技术方案1 山西xxxx煤矿 KJ278 矿用井下人员定位管理系统 设计方案 全力打造数字矿山管理平台 北京凯瑟新起点科技发展有限公司Beijing capstone Science & Technology Development Co.,Ltd 目录 第一部分KJ278矿用井下人员定位管理系统介绍·······4-13 一、系统概述(4) 二、系统组成(4) 三、系统工作原理(5) 四、系统管理功能···························5-10 五、系统主要技术指标························10-13第二部分xxxx煤矿应用设计方案及报价···········14-19 一、项目基本情况简介(14)
二、方案设计遵循的原则(14) 三、方案设计思想(14) 四、系统方案设计依据(15) 五、项目设计介绍(16) 六、系统效果图(17) 七、人员定位设计安装位置表格(17) 八、相似成功案例(17) 九、项目报价表............................18-19 第四部分质量控制....................20-21一、电路板的生产. (20) 二、元器件的保证(20) 三、产品的生产···························20-21 四、生产过程的质控(21) 五、产品的出厂检验(21) 六、产品的包装运输及现场调试(21) 第五部分项目的实施、调试与验收··············22-25 一、项目管理(22) 二、施工计划(22) 三、与客户的配合(24)
井下人员定位概述
概述 我国煤炭产量居世界首位,煤矿数量超过世界上其他主要产煤国家的煤矿总数,煤炭行业是我国国民经济和社会发展的支柱产业。安全是煤炭生产的头等大事,安全对煤炭生产起着保证、支撑和推动作用。近年来,国家针对煤矿安全问题采取了多方面的有力措施,但由于长期以来煤矿安全投入明显不足,煤矿企业安全装备严重缺乏,安全管理手段极其落后,国家煤矿安全形势仍然十分严峻。因此,加大煤矿安全投入,推广采用先进的煤矿安全装备与手段已成为煤炭行业迫在眉睫的必然需要。 煤矿安全最重要的是保证矿工生命的安全,煤矿安全管理最重要的也是对矿工安全的管理,其中对矿工在井下工作位置的准确监测是实现保证矿工安全目的的基本前提。为此,国内外很多企业投入大量精力,纷纷研制出一批针对井下人员的考勤定位系统,但从技术和性能等各方面都存在很多问题和缺陷,不能满足对井下人员位置准确监测的要求。 针对现代矿井生产企业迫切的安全管理与人员管理需求,西安凯虹电子科技有限公司应用最先进的射频识别与无线监控技术,历时5 年半,潜心研制出国际领先的井下目标定位跟踪系统——KJ133 型矿用人员定位安全管理系统。该系统的显著特点是可实现井下各种巷道条件下的信号“全覆盖” ,实现对井下人员、车辆、设备等目标的“全程的、实时的、连续的、精确的定位跟踪” ,同时实现对井下人员的“实时双向无线通讯” 。该系统的应用,可极大提高矿井生产企业安全生产管理水平。目前,公司产品已成功应用于神华集团神东煤炭分公司、铁法煤业集团、阳煤集团、鹤壁煤业集团、澄合矿务局等国有大型煤矿企业,并得到用户一致高度认同,为煤矿企业的日常生产调度、安全监管与应急救援等信息化管理工作提供了重要的有力保障。
RFID人员精确定位服务方案
沃科RFID人员精确定位方案 沃科合众科技(北京)有限公司 Walk Horizon Version 1.0 2011年11月
目录 1.系统概述 (3) 2.系统目标 (3) 3.设计原则 (3) 4.系统及产品特点 (4) 5.系统组成及组件功能 (4) 6.系统网络构成示意图 (5) 7.系统功能 (6) 7.1.系统基本功能 (6) 7.2.人员的定位功能 (6) 7.3.敏感区域或人流密集区域监控功能 (6) 7.4.保安人员巡逻监督功能 (7) 7.5.系统的电子地图功能 (7) 7.6.系统多时间区段功能 (7) 8.产品介绍 (8)
1.系统概述 RFID人员精确定位系统是通过远距离、非接触式采集电子标签的信息,实现人员在移动状态下的自动识别,从而实现目标的自动化管理。该系统产品集计算机软硬件、信息采集处理、数据传输、网络数据通讯、等技术综合应用为一体的高性能识别技术,是实现信息化和自动化管理的基础产品之一,是一种能有效对社区人员进行自动识别和联网监管的重要科技手段。 2.系统目标 1、保安巡检点追踪,关键路线的全部覆盖; 2、工作人员出/入社区自动记录; 3、人员定位查询,了解具体人员所处的区域; 4、关键区域内人数统计分析: 关键区域可设定为:区域A,区域B,设备间,消防间,办公区等; 定义报警阙值,当区域内人员的数量达到报警值,系统提出警示,便于安全管理和及时疏散人群。 3.设计原则 ?实用性 系统具备完备的功能和实用水准,系统设置强调实用化;符合国内外有关规范的要求,使用简捷,操作方便。 ?先进性 系统在满足可靠性和实用性前提下保持了技术的先进性,特别符合计算机技术和网络通信技术最新发展潮流并且应用成熟。 ?安全可靠性 系统具有极高的安全性、可靠性。具有长期和稳定工作的能力。
煤矿井下定位系统
煤矿井下定位系统 系统设计原理 井下人员定位管理及搜救系统是由地面监控中心主计算机在系统软件支持下,通过数据传输接口和沿巷道铺设的通讯光/电缆,无间断、即时地对井下安装的无线数据采集器进行数据信息采集,无线数据采集器将自动采集有效识别距离内的标识卡的信息,并无间断、即时地通过传输网络将相关数据传送至地面中心站。数据信息经分析处理后,将井下人员(或机车等移动目标)动态分布在主计算机界面中得以实时反映,从而实现井下安全状态在井上数字化管理的目的。 遵循“统一发卡、统一装备、统一管理”的原则,将标识卡视为“上岗证”或“坑道准入证”,按准许上岗人员实行“一人一卡”制。 根据矿井监测需求,在井下坑道、峒室、作业面等地点安装无线数据采集器,并通过电缆/光纤数据传输接口相互连接为井下高速工业以太网,从而构成完整通讯线路。 煤矿生产单位输入工作人员相关信息后,向下井工作人员颁发并装备标识卡。系统数据库记录该标识卡相对应人员的基本信息,包括姓名、年龄、性别、所属班组、所属工种、职务、本人照片、有效期等基本信息。 进入坑道的工作人员必须随身携带标识卡,当持卡人员经过设置识别系统的地点时被系统识别。系统将读取该卡号信息,通过系统传输网络,将持卡人通过的路段、时间等资料传输到地面监控中心进行数据管理,并可同时在地理信息大屏幕墙上出现提示信息,显示通过人员的姓名。如果感应的无线标识卡号无效或进入限制通道,系统将自动报警,安全监控中心值班人员接到报警信号,立即执行相关安全工作管理程序。 生产单位可根据生产计划,对该标识卡进行授权管理。授权范围包括:该员工可以准入的坑道或作业面。为防止无关人员和非法人员进入坑道或作业面,系统设置该卡准入坑道或作业面的时效管理模块及卡的失效、报失等。 坑道一旦发生安全事故,监控中心在第一时间内可以知道被困人员的基本情况,救险队使用移动式远距离识别装置,在10-30米的范围内方便探测遇险人员的位置,便于(进行安全高效的救护、救助工作)救护工作的安全和高效运作,便于事故救助工作的开展。 系统可自动生成考勤作业的统计与管理等方面的报表资料,提高管理效益。 1.3.2系统设计依据 (1)GA/T75《安全防范工程程序与要求》 (2)MT209-1990《煤矿通信、检测、控制用电工电子产品通用技术要求》 (3)国家安监总局《煤矿井下人员位置管理系统标准(建议)稿》 1.4系统功能及特点 1.4.1系统功能:
车载导航系统精确定位算法的优化
收稿日期:2013‐07‐17 网络出版时间:2013‐11‐22 基金项目:中央财政支持地方高校专项发展基金资助项目 作者简介:谭宝成(1955-),男,教授,E‐mail:deng1hao1@126.com. 网络出版地址:http://www.cnki.net/kcms/detail/61.1076.TN.20131122.1628.201403.195惨027.htmldoi:10.3969/j.issn.1001‐2400.2014.03.027 车载导航系统精确定位算法的优化 谭宝成,邓子豪 (西安工业大学电子信息工程学院,陕西西安 710021) 摘要:针对车载导航系统下定位的点转换到实际电子地图的过程中存在误差,通过改善坐标转换模型来提 高车载导航系统的定位精度,在经典的平面转换算法的基础上,首先利用高斯投影把全球定位系统接收的 (B,L)坐标转化成平面坐标(X,Y);其次根据最小二乘法,确定转换参数;同时把公共点本身误差作为随机 参数处理,将转换参数作为非随机参数,利用最小二乘法配置建立转换模型,以得到稳定的参数估值,避免了 公共点因分布不均引起的误差.与传统算法相比,实验结果验证了该算法具有更高的实时性和稳定性. 关键词:车载导航;平面转换模型;坐标转换;定位精度 中图分类号:TP301.6 文献标识码:A 文章编号:1001‐2400(2014)03‐0181‐06 Vehiclenavigationsystemoptimizationofprecisepositioningalgorithm TANBaocheng,DENGZihao(EngineeringInstituteofElectronicInformation,Xi摧anTechnologicalUniv.,Xi摧an 710021,China) Abstract: Errorsexistinthevehiclenavigationsystemunderthepositioningofthepointconversiontotheactualelectronicmapintheprocess.Inordertoimprovethevehiclenavigationsystempositioningprecisionbyamelioratingthecoordinatetransformationmodel,onthebasisofclassicalplanetransformation algorithms,wefirstusethegaussprojectionoftheGPSreceiving(B,L)coordinatesintoplanecoordinates(X,Y),Then,Accordingtotheleastsquaresmethod,weobtainthetransformationparameter.Atthe sametime,theerrorofthecommonpointitselfservesasarandomprocessingparameters.Accordingtothemethodofleastsquareconfigurationmodel,wetransformparametersasnonrandomparameters.Inordertoobtainastableparameterestimation,weavoidthecommonpointerrorcausedbyoftheunevendistribution.Experimentalresultsshowthatthealgorithmhasahigherreal‐timepropertyandstability.KeyWords: vehiclenavigation;planeswitchingmodel;coordinatetransformation;positioningaccuracy 文献[1]主要将平面转换的方法应用到基坑的水平位移监测中,通过误差传播定律对转换参数精度进行评定,有效避免了以往在外业工作中设自由全站时作业效率低、工程量大的缺点,但没有讨论监测点分布对精度的影响.文献[2]将平面转换算法应用于车载导航中,通过对高斯公式进行简化,对其高阶项进行剔除,其定位精度符合实际定位要求,算法简单快速.文献[3]在平面转换的基础上提出了最小二乘法配置原理,将换算坐标视作非随机变量,其优点在于协方差阵的换算坐标,在换算过程中与已知坐标统一平差,以提高坐标转换精度.在10m的动态精度下,转换精度可达到0畅2~0畅3m范围.文献[4]阐述了七参数和三参数算法在全球定位系统(GPS)导航中的应用,根据最小二乘法计算得到估计转换参数,导航定位精度可达到厘米级别,但是算法复杂,实时性差,适用于大范围的区域内,具有一定的局限性.文献[5]提出了平面转换算法在GPS定位中的应用,详细推导了平面转换的实用公式,提出了新的残差内插法,有效剔除了误差较大的公共 2014年6月 第41卷 第3期 西安电子科技大学学报(自然科学版)JOURNAL OF XIDIAN UNIVERSITY Jun.2014Vol.41 No.3
聚来井下人员定位系统技术具体实施方案模板.doc
井下人员定位系统技术方案 1.井下人员定位系统技术方案 1.1 系统概述 基于第三代RFID 技术研发的井下人员、设备定位跟踪系统是采用目前国际上最 先进的 BEST-RFID技术的井下定位系统。能够及时(无轮巡、无延时)、准确(无错码、无漏卡)地将井下各个区域人员及设备的动态情况反映到地面计算机系统,使 管理人员能够随时掌握井下人员、设备的分布状况和每个矿工的运动轨迹,以便于 进行更加合理的调度管理。当事故发生时,井下人员可以通过持有的定位卡片向地 面机房求救,救援人员也可根据上海聚来井下人员及设备定位系统所提供的数据、 图形,迅速了解有关人员的位置情况,及时采取相应的救援措施,提高应急救援工 作的效率。 第三代RFID 技术 ---BEST RFID--- 又称卓越RFID。是从第一代RFID 不能准确无 误识别人员信息—-- 到第二代RFID 只能单读头较准确识别,再到第三代BEST RFID--- 卓越 RFID 能网络化、多方向、多读头,(两个以上、单一子网即多可达上百个,整个网络可达上千个)同时准确识别人员定位信息的本质性飞跃。 第三代 RFID 技术 ---BEST RFID ,又称卓越RFID,应用 0.13um 芯片制造工艺, 依靠世界顶尖的射频电子技术专家,整合国际上最领先的天线技术、光通信技术、工 业以太网传输技术、数据库处理技术、计算机软件技术、地理信息系统技术、互联网 技术、工程结构学技术、井下应急救灾技术等多学科的综合课题攻关,全面、 完善、彻底地解决了井下人员定位系统中遇到的前两代RFID 无法突破的技术瓶颈问题。 前两代 RFID 技术虽然在一些应用中能解决单一读头识别,但当系统要求两个以 上读头组成系统网络,用于识别人员信息和定位时,会出现人员信息、定位数据延 时达 10 秒、 10 个以内读头数据延时就达30 秒, 10 个以上读头,数据延时高达三、 五分钟以上甚至十数分钟的不治之症。并且,多读头时数据传输较慢。因数据轮巡,各读头数据只能分批上传,造成井下人员的定位信息忽前忽后,定位轨迹上下乱窜。根本不能即时有效反应井下人员的位置信息。更突出的问题是,整套子系统读头数 量不能超过 30 个,超过时就要增加通信箱,造成数据延时成倍增加,延时达五分种甚至十几分钟,井下 30 秒,人就可能移动一百米,五分种以上的人员定位信息,人
井下人员定位系统软件使用手册2.0
井下人员定位系统用户手册2.0 深圳市哲扬科技有限公司 2012-02-09
前言 系统简介 本系统是以监控与定位一体化为主要特点的管理系统,以此提高矿山安全管理水平,加快矿山生产工作现代化进程,在保障矿山安全生产中发挥着重要作用。 矿用人员定位系统是深圳哲扬科技有限公司为矿井、矿山隧道等场所的人员和移动设备进行实时定位、跟踪监控和考勤管理开发的完整解决方案。本系统能及时、准确将井下各个区域的人员及设备的动态情况反映到地面计算机,以便于进行更加合理的调度管理。 矿用人员定位系统可对矿井入井人员/设备进行实时定位、跟踪监测,随时清楚掌握每个人员/设备在井下的位置及活动轨迹。如果发生灾变,还可以立即从监控计算机上查询事故现场的人员具体位置分布情况、被困人员数量和他们的姓名。利用系统的日常考勤管理功能,能对下井人员进行考勤管理。 《培训手册》简介 本手册分为三大部分: 第一篇系统概述 系统概述介绍《井下人员定位系统2.0》的结构,工作原理。 第二篇系统管理 系统管理篇指导系统管理员完成对软件运行环境的配置、软件的安装、及初始化设置等。第三篇系统功能 系统功能篇指导不同角色权限的用户使用不同的功能,对每一项功能操作的具体过程、步骤进行描述,它旨在描述操作的功能及流程,是本手册的核心部分。
目录 前言..................................................................................................................................................... I I 第一篇系统概述 (4) 第一章系统架构 (4) 第二篇人员定位系统功能 (5) 第一章界面概述 (5) 第二章查询 (9) 第一节实时查询 (9) 第二节历史查询 (11) 第三节人员报警查询 (13) 第四节基站报警查询 (17) 第五节查询统计 (19) 第三章管理 (20) 第一节信息管理 (20) 第二节地图设置 (23) 第三章系统管理 (28) 第四章系统操作流程图 (30)
如何实现人员精确定位
如何实现人员精确定位 ——基于WSN技术的第三代人员定位系统 作者:中国矿业大学教授华钢安徽烽讯电子科技公司金灏 井下人员定位系统示意图 随着我国对煤矿安全日益重视,监管力度不断加强,大中型煤矿和众多乡镇小煤矿均已大量装备了煤矿安全监控系统,有效地遏制了重大瓦斯煤尘爆炸事故的发生。 生产安全的核心是人的安全。煤矿迫切需要利用相应的矿井人员跟踪定位设备,全天候对煤矿入井人员进行实时自动跟踪和考勤,随时掌握每个员工在井下的位置及活动轨迹、全矿井下人员的位置分布情况以及井下人员位置。矿用人员定位系统是集井下人员考勤、跟踪定位、灾后急救、日常管理等于一体的综合性应用系统。这一科技成果的实现,将为煤炭企业的安全生产、日常管理以及事故急救带来可靠指挥依据。 实现人员跟踪定位 矿用人员定位跟踪系统以标示卡为基本采集单位,完成对下井者地理信息和工作信息的采集、存储、处理、显示和打印,同时可以对各种异常状态进行预警、报警。系统主要由标识卡、读卡器、人员检测分站、通信接口、服务器、打印机等组成。 从结构上划分,人员定位跟踪系统主要包括主站、分站和移动分站。主站模块既是系统的信息处理中心,又是用户的信息获取源。从各种总线传输汇总的数据,经过主站模块完成数据筛选、信息存储、异常处理后,与用户进行信息交流;分站模块包括各种基站、读卡器和标示卡,共同形成一个动态信息采集监控区,并通过一定的信息传送方式,将数据汇总至主站模块。 从功能上划分,人员定位跟踪系统基本功能包括实时数据采集与存储、井下人员的电子考勤、动态定位、地图管理、历史路径查询与显示、数据联网、报表生成,以及
报警提示井下人员进入危险区域及限制区域,矿难时提供井下人员搜救帮助等功能。 以WSN技术为核心 人员定位跟踪系统的核心主要涉及传感器及其组网技术与人员信息的地理化显示处理技术。特别是前者的升级换代,从根本上标志着人员定位跟踪系统的发展阶段;后者作为决策支持的主要工具,体现了系统智能化、专家化的程度。 传感器及其组网技术 在无线技术基础上的煤矿井下人员定位系统经历了三个主要阶段,前两个阶段都采用RFID技术。RFID的中文全称是无线射频识别技术,它利用无线电波对记录媒体进行读写。与其他识别技术相比,RFID技术具有防水、防磁、耐高温、使用寿命长、读取距离大、标签上数据可以加密、存储数据容量更大、存储信息更改自如等优点。但是这种技术的读卡器价格昂贵,如果要实现人员位置的密集跟踪,系统造价将难以承受。而人员检测与管理系统作为一个综合性系统,与安全监控系统具有同等重要性,若只实现小范围的人员检测,难以体现其价值,更难以发挥其应用前景。 随着现代传感器网络的发展,无线传感器网络(WSN)技术走向成熟,并在多个领域有成功应用。因此,基于WSN技术的第三代人员定位跟踪系统成为近年来的研究热点。WSN由部署在监测区域内大量的廉价微型传感器节点组成,通过无线通信方式形成一个自组织的网络系统,其目的是协作地感知、采集和处理网络覆盖区域中被感知对象的信息,并发送给观察者。 WSN家族非常庞大,包含多个协议族。根据煤矿应用的特点,第三代人员定位跟踪系统不约而同地把研究的焦点取在Zigbee标准上。Zigbee是基于IEEE 802.15.4无线标准研制开发的关于组网、安全和应用软件等方面的技术标准。完整的Zigbee协议套件由高层应用规范、应用会聚层、网络层、数据链路层和物理层组成。 应用汇聚层是把不同的应用映射到Zigbee网络上,主要包括安全属性设置和多个业务数据流的汇聚等功能;网络层则可实现网络的自组织和自维护,从而降低了网络的维护成本。Zigbee技术具有低功耗、短时延、低速率、近距离、低成本、大容量、高安全性、免执照频段等特点,因此在短距离无线通信领域有着较大的优势。而煤矿巷道在空间上本身具有局限性,若采用基于Zigbee技术的低成本传感器密集分布,将为当前的井下人员跟踪带来质的飞跃。 人员信息的地理化显示技术 用户并不关心传感器网络采用何种类型,其主要的系统体验来源于人员地理信息的可视化效果。如何将井下人员信息直观地传达给用户,并在灾害过程中为决策者提供临场感,是人员定位跟踪系统面临的另一难题。 人员定位系统的未来
精确定位相对点的常用方法
在AUTOCAD里完全能用的上啊,很好用的。 CAD图形对象通常是通过指定点的位置或输入坐标值来绘制的。尧创CAD2010的定位功能功能异常丰富,可以输入绝对坐标值定位,可以捕捉对象特征点精确定位,可以运用正交导航、极轴导航、对象追踪导航定位,还可以输入相对坐标值进行定位……。其中,输入相对坐标值定点的方法用得比较普遍,也最灵活多变。下面以如何定位图中的圆心为例介绍几种精确定位相对点的常用方法: 图(一) 1. 直接距离输入法 直接距离输入法:通过移动光标指示方向然后输入距离来指定点。 直接距离输入法与极轴导航结合使用,可以绘制指定长度和角度的直线。其操作步骤: 1)启动 LINE 命令并指定第一点; 2)移动光标,直到显示与要绘制直线相同的角度的导航虚线(前提:极轴导航开启,设置极轴导航角中包括所要绘制的角度)。 3)在命令提示下,输入距离。 直接距离输入法也可以和对象捕捉和对象追踪结合使用,准确定位相对于对象追踪点指定方向和距离的点。 图(一)中圆心的定位方法: 1)启动(指定圆心、半径)画圆命令; 2)移动光标到L2的中点稍作停留,将中点设置成对象追踪点; 3)沿中点向上移动光标,以指示方向; 4)输入距离13,圆心即可正确定位。 2. TK方法 追踪(命令:tk):可指定一系列临时点,每个点均自上一点偏移。 图(一)中圆心的定位方法: 命令: _circle 指定圆的圆心或 [三点(3P)/两点(2P)/相切、相切、半径(T)]: tk //启动画圆命令后,再输入tk追踪,
第一个追踪点: //单击红色标识点作为第一个临时追踪点 下一点 (按 ENTER 键结束追踪): 20 //向第一个临时追踪点右方移动光标,输入偏移距离20,确定第二个临时追踪点 下一点 (按 ENTER 键结束追踪): 13 //向第二个临时追踪点上方移动光标,输入偏移距离13,确定第三个临时追踪点 下一点 (按 ENTER 键结束追踪): //按 ENTER 键结束追踪,距离红色标识点(@20,13)处的点被选中作圆心 指定圆的半径或 [直径(D)]: 6 //输入半径,回车完成
人员精确定位系统报告
井下精确定位系统可行性 研究报告 机电装备研究所 2018.4.3 一、义煤集团目前存在的问题 1、矿用电机车 煤炭生产过程中,矿用电机车是井下轨道煤炭运输及辅助运输重要的动力设备,电机车按供电方式分为架线式和蓄电池式两种,轨道数量有单轨道和双轨道两种。由于电机车具有结构简单,维护方便,运输费用低等特点,在煤矿水平巷道中,作为运输工具起着很大作用,得到广泛应用。为确保煤矿井下运输安全,《煤矿安全规程》对电机车运输的轨距、轨型、运行速度、机车的制动距离以及两台机车在同一轨道同一方向行驶时,必须保持不小于100m的距离等做出了明确的规定。
由于煤矿井下运输巷道沿途灯光昏暗,工况恶劣,如果电机车司机注意力稍有不集中,反应迟钝,观察判断失误以及道岔错位等原因,电机车很容易出现事故,轻者掉轨,误开到其它轨道上,重者使两电机车行驶到同一轨道上造成迎面相撞或追尾事故,特别是迎面相撞事故由于极大的惯性,造成的后果更加严重。可能会损毁轨道、路基、车辆和运送的设备,甚至会造成冒顶塌方、火灾瓦斯事故。若是运送人员的车辆相撞后果更为严重,将造成大量人员受伤。而目前电机车的制动一般都是人工操作电阻制动和手闸制动两种,刹车时易产生剧烈抖动或刹车过猛而造成人为事故。这种机车相撞事故一旦发生危害巨大,后果惨重,极大地影响了煤矿企业正常有序的安全生产。 除电机车之间出现碰撞事故外,电机车撞人事故也常有发生。长期以来大巷机车运输事故在主巷运输事故中所占比例一直较大,其发生的类型一般有以下几类:①大巷作业人员避让列车不及被碰挂致伤;②大巷人行道宽度不够,使巷道内人员无法安全避让列车,被列车碰挂致伤;③无乘车候车室的大巷,下班后候车的工人因劳累睡在线路旁,被列车碰挂致伤;④乘车人员乘坐人车时,未挂好防护链且因劳累睡着后,意外被列车甩出车外摔伤; ⑤跟车工摘挂钩时,因与司机联络失误或机车司机操作失误,兑车不当,被挤碰致伤;⑥行人在从石门巷道快速跨越大巷轨道时,被运行中的列车碰伤等。 巷道欠维护,上顶冒落,机车和矸石相撞,也时有发生。 要消除以上事故,一是要完善巷道设施;二是职工要做好自我保护;更重要的是要在完善机车安全设施,主动做好大巷行车安全防范工作。 2、人员定位 煤矿安全生产事关煤矿系统人员的生命和财产安全,各级政府一贯高度重视煤矿安全生产问题,并采取了一系列措施不断加强安全生产工作。通过不断的努力,煤矿安全生产状况总体上趋于稳定好转,但煤矿生产的主体集中在井下,随着机械化开采程度的普及,井下巷道不断向四面延伸,巷道纵横交错,人流、车流错综复杂。作为地面生产指挥控制核心部门,实时了解井下人员、车辆、原煤及材料的流动运行情况和跟踪监测就显得尤为重要,一旦遭遇各种井下事故,必须在最短的时间内获取事故现场的人员状况及分布情况,将为后续工作提供主要参考依据,以减少盲目性,因此,改变目前煤矿企业对井下人员的管理模式,优化井下人员定位管理系统,实现井下人员的精确定位和管理信息的精确化、精细化已成为所有煤矿企业日趋关心的问题。 煤矿井下人员定位系统能够及时、准确的将井下各个区域人员及设备的动态情况反映到地面计算机系统,使管理人员能够随时掌握井下人员、设备
煤矿井下人员定位系统
煤矿井下人员定位管理系统 应用背景:随着国家对煤矿安全生产工作的重视程度日益提高,现有煤矿安全生产监控、监测设备技术上的不足和缺陷也逐渐显现出来,已经影响到煤矿安全工作的正常开展。煤矿井下人员定位管理系统正是在这样的大背景下显现出了自身强大的优势和在煤矿安全信息化建设中举足轻重的作用! 一.产品概述 矿山井下人员定位管理系统是集计算机软硬件、数据采集、数据传输、自动化控制等多技术、多学科综合应用为一体的自动识别产品。该产品通过对矿山坑道内的移动目标,非接触式的远距离自动数据采集、处理、实现对人、车、物等移动或静止状态的自动识别,从而实现目标的自动化管理,概括如下: ◆矿山井下人员定位跟踪系统可实现对目标的准确识读 ·井下总线和井上网络形成联网系统 ·软件实现人员监控、统计分析、查询及其它管理功能 ◆实现人员安全监控和矿山数字信息化 ·下井人员情况监控和定位 ·应急救援、事故调查和安全管理 ·矿山数字信息化 该产品是结合煤矿井下安全生产的特点及RFID技术的特性,通过自身技术力量设计并生产制造的适用于煤矿使用且具有自主知识产权的智能定位设备,整套系统的软件平台以紫金桥监控组态软件为基础。具有隔爆安全设计,系统作用距离远、可根据需要调整系统的识别范围、识别无盲区、信号穿透力强、安全保密性能高、对人体无电磁污染、环境适应性强、可同时识别众多目标、便于网络连接等性能优点。这种崭新的信息采集、存贮、传递和处理技术,已迅速得到国内外同行的广泛关注,对煤矿井下人员定位跟踪管理有着重要的现实意义。 公司自助研发的“煤矿”系列组态软件和实时数据库系统目前已经推出3.6版本,它们设计起点高、适应性强,应用面广。软件的安全性、稳定性和先进性都达到或超过了国内外同类软件的水平。价格与国内外同类软件相比更是有绝对的优势,目前已经广泛应用于石化、炼油、冶金、电力、化工、汽车、环保、时政、交通、智能楼宇、水利等诸多行业。二.产品组成及其功能 整个产品由井下数据采集系统和地面安全监测管理系统构成。 井下数据采集系统由智能定位器和射频安全卡两部分组成,具有如下特点: ◆带有射频安全卡的对象经过智能定位器时即被自动识别和读取 ◆远距离、多卡同时、完全自动读取 ◆矿用智能定位器可联网组成多点监控系统并进行定位 矿用智能定位器 ◆整体置于防爆壳内 ◆通过RFID模块实现读取 ◆通过控制板实现数据过滤、存储、转发、通讯、联网 ◆485接口/可选光纤接口 ◆矿用智能定位器可联网组成多点监控系统并进行定位在所有重要监测点安装矿用智能定位器,当携带有射频安全卡的井下工作人员经过监测点时,系统自动识别人员信息,同时将数据实时传输至地面这安全监测中心。一旦发生事故,可迅速查询被困人员最后出现的地点及时间信息。
(完整版)精确定位系统解决方案设计
人员精确定位系统方案
第一章引言 自十一五以来,我国加大了基础设施建设力度,中国交通建设事业进入了快速发展轨道。尤其在高速公路、铁路、城市轨道方面的建设突飞猛进。在公路、铁路建设方面,道路建设路线逐渐由平原、微丘向山区高原挺进,隧道、桥梁等结构物占线路的比重越来越大,隧道建设工程数量持续增长;在城市轨道建设方面,地铁具有节省土地、减少噪音、减少污染、节省资源等优点,成为各城市解决拥堵、提升城市交通运输能力的重要手段。由于隧道及城市地铁建设的造价高、运营管理相对复杂、施工环境恶劣、事故发生频率较高,常要求对隧道中人员数量进行统计、对施工现场环境进行监控。 目前市场上隧道安全监控系统中都没有与外界直接通话的无线通信系统,在遇到突发事故,如崩塌、涌水涌泥等事故,不能及时向隧道监控室汇报,很容易贻误抢险时机。如果有无线通信系统,施工人员在隧道中工作,可随时将隧道的掘进和安全情况汇报到隧道监控室,便于调度和及时处理突发事故。 当遇到隧道突发事故,对隧道施工人员的抢救缺乏可靠的位置信息,也缺乏语音通信手段,抢险救灾、安全救护的效率仍然不高,效果不理想。由于通信网络不畅,通信手段单一,网络承受能力差,往往造成领导层信息不畅通,指挥不足,数字不准,不利于事故的抢险,极易造成事故损失的扩大。隧道对利用相应的人员跟踪定位设备,全天候对施工人员进行实时自动跟踪和考勤,随时掌握每个员工在隧道的位置及活动轨迹、全隧道人员的位置分布情况等需求迫切。 苏州任辉物联科技有限公司是一家集研发、生产、销售、服务为一体的新型高科技企业,公司多年来专业致力于提供通道闸系统,门禁系统的开发、整合与应用。凭借多年的经验积累和不断的技术创新,我们有能力为客户提供合理的智能化考勤、门禁、消费、工地门禁通道系统解决方案,建设一流的系统工程,以优质的售后服务和严格的培训机制保证系统长期、连续、稳定
煤矿井下人员定位系统方案
煤矿井下人员定位系统方案 关键字:煤矿人员定位井下人员定位人员定位煤矿考勤 摘要:该系统适用于煤矿井下人员位置识别与跟踪回放、人员考勤、超时报警、超员报警、限制区报警、人员情况统计和人员救援指挥等 一、煤矿井下人员定位系统概述 煤矿安全生产事关人民群众的生命和财产安全,各级政府一贯高度重视煤矿安全生产问题,并采取一系列措施不断加强安全生产工作。通过不断的努力,近一时期煤矿安全生产状况总体上趋于稳定好转,但由于基础薄弱等种种原因,煤矿安全生产状况仍然不容乐观。如何改变目前煤矿企业对井下人员落后的管理模式,如何实现管理的现代化、信息化也成为所有煤矿企业关心的问题,因此建立以灾害预防、事故救助、电子信息化管理为主要目标的信息化和智能化建设势在必行。 木兰煤矿井下人员定位管理系统的核心识别设备采用了
木兰公司自主研发的具有国际先进水平的ML-RFID技术, ML-RFID技术采用了当今最先进的0.18uM的微波芯片技术,使RFID的性能和原来的微波技术相比得到了本质的改进,彻底解决了远距离、大流量、超低功耗、高速移动的标识物的识别和数据传输难题,而且成本较以往大大降低,同时也解决了中低频电磁波技术感应距离短防冲突能力差的致命弱点。 木兰煤矿井下人员定位管理系统能够及时、准确的将井下各个区域人员及设备的动态情况反映到地面计算机系统,使管理人员能够随时掌握井下人员、设备的分布状况和每个矿工的运动轨迹,以便于进行更加合理的调度管理。当事故发生时,救援人员也可根据井下人员及设备定位系统所提供的数据、图形,迅速了解有关人员的位置情况,及时采取相应的救援措施,提高应急救援工作的效率。 井下人员及设备定位系统是集井下人员考勤、跟踪定位、灾后急救、日常管理等一体的综合性运用系统,集合了国内识别技术、传输技术、软件技术等最顶尖的产品和技术,是目前国内技术最先进、运行最稳定、设计最专业化的井下人员定位系统。这一科技成果的实现,将为煤矿企业的安全生产和日常管理上台阶以及事故急救带来了新的契机。
高精度快速定位技术与算法
高精度快速定位技术与算法 RTK (Real Time Kinematic)技术是GPS实时动态定位技术,它将GPS与数传技术相结合,实时解算并进行数据处理,在 1~ 2s 的时间里得到高精度的位置信息。 常规 RTK技术是一种对动态用户进行实时相对定位的技术,该技术也可用于快速静态定位。进行常规RTK工作时,基准站需将自己所获得的载波相位观测值 (最好加上测码伪距观测值)及站坐标,通过数据通信链实时播发给在其周围工作的动态用户。于是这些动态用户就能依据自己获得的相同历元的载波相位观测值 (最好加上测码伪距观测值)和广播星历进行实时相对定位,并进而根据基准站的站坐标求得自己的瞬时位置。为消除卫星钟和接收机钟的钟差,削弱卫星星历误差、电离层延迟误差和对流层延迟误差的影响,在 RTK中通常都采用双差观测值。 RTK技术是建立在流动站与基准站误差强相关这一假设的基础上的。当流动站离基准站较近 (例如不超过 1 0~ 1 5km)时,上述假设一般均能较好地成立,此时利用一个或数个历元的观测资料即可获得厘米级精度的定位结果。然而随着流动站和基准站间间距的增加,误差相关性将变得越来越差。轨道偏差,电离层延迟的残余误差和对流层延迟的残余误差项都将迅速增加。从而导致难以正确确定整周模糊度,无法获得固定解。 这项技术始于2 0世纪 90年代初,极大地拓展了GPS的使用空间,代表着高精度GPS的最高水平。但是RTK技术有着一定局限性,当流动站和基准站间的距离大于 50 km时,常规 RTK的单历元解一般只能达到分米级的精度,使其在应用中受到限制: 1. 用户需要架设本地的参考站 2. 误差随距离增长 3. 误差增长使流动站和参考站距离受到限制 4. 可靠性和可行性随距离降低。 在这种情况下为了获得高精度的定位结果就必须采取一些特殊的方法和措施,于是网络 RTK技术便应运而生了。 VRS(Virtual Reference Station)是虚拟参考站,代表GPS网络 RTK技术。它的出现使一个地区的所有测绘工作成为一个有机的整体,扩展了 RTK的作业范围,使GPS的应用更广泛,精度和可靠性也进一步提高。
井下人员定位系统技术方案
井下人员定位系统技术方案 1 聚来井下人员定位系统技术方案 1.1 系统概述 上海聚来射频电子技术有限公司基于第三代RFID技术研发的井下人员、设备定位跟踪系统是采用目前国际上最先进的BEST-RFID技术的井下定位系统。能够及时(无轮巡、无延时)、准确(无错码、无漏卡)地将井下各个区域人员及设备的动态情况反映到地面计算机系统,使管理人员能够随时掌握井下人员、设备的分布状况和每个矿工的运动轨迹,以便于进行更加合理的调度管理。当事故发生时,井下人员可以通过持有的定位卡片向地面机房求救,救援人员也可根据上海聚来井下人员及设备定位系统所提供的数据、图形,迅速了解有关人员的位置情况,及时采取相应的救援措施,提高应急救援工作的效率。 第三代RFID技术---BEST RFID---又称卓越RFID。是从第一代RFID不能准确无误识别人员信息—--到第二代RFID只能单读头较准确识别,再到第三代BEST RFID---卓越RFID 能网络化、多方向、多读头,(两个以上、单一子网即多可达上百个,整个网络可达上千个)同时准确识别人员定位信息的本质性飞跃。 第三代RFID技术---BEST RFID,又称卓越RFID,应用0.13um芯片制造工艺,依靠世界顶尖的射频电子技术专家,整合国际上最领先的天线技术、光通信技术、工业以太网传输技术、数据库处理技术、计算机软件技术、地理信息系统技术、互联网技术、工程结构学技术、井下应急救灾技术等多学科的综合课题攻关,全面、完善、彻底地解决了井下人员定位系统中遇到的前两代RFID无法突破的技术瓶颈问题。 前两代RFID技术虽然在一些应用中能解决单一读头识别,但当系统要求两个以上读头组成系统网络,用于识别人员信息和定位时,会出现人员信息、定位数据延时达10秒、10个以内读头数据延时就达30秒,10个以上读头,数据延时高达三、五分钟以上甚至十数分钟的不治之症。并且,多读头时数据传输较慢。因数据轮巡,各读头数据只能分批上传,造成井下人员的定位信息忽前忽后,定位轨迹上下乱窜。根本不能即时有效反应井下人员的位置信息。更突出的问题是,整套子系统读头数量不能超过30个,超过时就要增加通信箱,造成数据延时成倍增加,延时达五分种甚至十几分钟,井下30秒,人就可能移动一百米,五分种以上的人员定位信息,人员就更加无法确定去向。这样的系统根本就不再有人员定位价值。再者,严重的是,前两代系统不具有方向性,或方向性只能在两个读头间,单进单出。不能进行三、四、五、六分巷以及整个定位系统方向性判别。 第三代BEST RFID 不仅单一读头与卡片间能完美地达到超高速识别、超远距离识别、超低功耗、超大流量识别,而且较前两代RFID而言,BEST RFID 真正实现了RFID技术的网络化应用和高速即时数据传输的、多读头(两个以上、