an efficient conical area evolutionary algorithm for bi-objective optimization
1420
IEICE TRANS.FUNDAMENTALS,VOL.E95–A,NO.8AUGUST2012
LETTER
An E?cient Conical Area Evolutionary Algorithm for Bi-objective Optimization
Weiqin YING?a),Member,Xing XU??,Yuxiang FENG?,and Yu WU???b),Nonmembers
SUMMARY A conical area evolutionary algorithm(CAEA)is pre-sented to further improve computational e?ciencies of evolutionary algo-rithms for bi-objective optimization.CAEA partitions the objective space into a number of conical subregions and then solves a scalar subproblem in each subregion that uses a conical area indicator as its scalar objective. The local Pareto optimality of the solution with the minimal conical area in each subregion is proved.Experimental results on bi-objective prob-lems have shown that CAEA o?ers a signi?cantly higher computational e?ciency than the multi-objective evolutionary algorithm based on decom-position(MOEA/D)while CAEA competes well with MOEA/D in terms of solution quality.
key words:bi-objective optimization,evolutionary algorithm,computa-tional complexity,conical area,local Pareto optimality
1.Introduction
Many engineering design and decision making problems in-volve simultaneous optimization of multiple,possibly con-?icting,objective functions[1].For instance,two objectives are usually considered at the same time in the deployment of wireless sensor networks[2]:maximizing the sensing cov-erage and maximizing the lifetime.Such design problems can generally be formulated as a multiobjective optimization problem(MOP)of the form:
minimize y=F(x)=(f1(x),f2(x),···,f m(x))T
sub ject to x∈Ω(1) whereΩis the decision space,x∈Ωis a decision vector,y is the objective vector,and R m is the objective space.If m=2, a MOP becomes a bi-objective optimization problem,which is the most elementary case of MOPs.
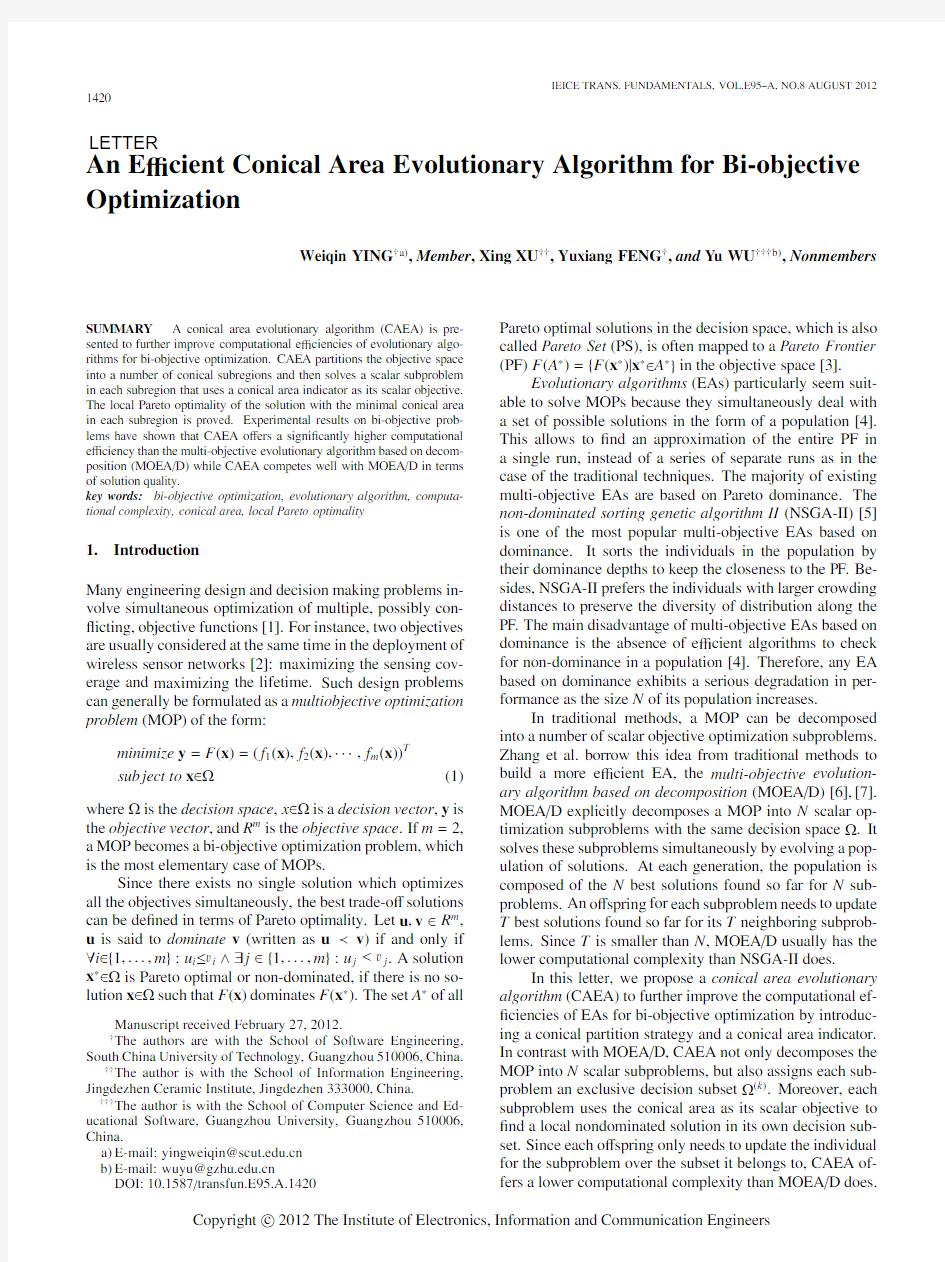
Since there exists no single solution which optimizes all the objectives simultaneously,the best trade-o?solutions can be de?ned in terms of Pareto optimality.Let u,v∈R m, u is said to dominate v(written as u?v)if and only if ?i∈{1,...,m}:u i≤v i∧?j∈{1,...,m}:u j Manuscript received February27,2012. ?The authors are with the School of Software Engineering, South China University of Technology,Guangzhou510006,China. ??The author is with the School of Information Engineering, Jingdezhen Ceramic Institute,Jingdezhen333000,China. ???The author is with the School of Computer Science and Ed-ucational Software,Guangzhou University,Guangzhou510006, China. a)E-mail:yingweiqin@https://www.360docs.net/doc/2f12353835.html, b)E-mail:wuyu@https://www.360docs.net/doc/2f12353835.html, DOI:10.1587/transfun.E95.A.1420Pareto optimal solutions in the decision space,which is also called Pareto Set(PS),is often mapped to a Pareto Frontier (PF)F(A?)={F(x?)|x?∈A?}in the objective space[3]. Evolutionary algorithms(EAs)particularly seem suit-able to solve MOPs because they simultaneously deal with a set of possible solutions in the form of a population[4]. This allows to?nd an approximation of the entire PF in a single run,instead of a series of separate runs as in the case of the traditional techniques.The majority of existing multi-objective EAs are based on Pareto dominance.The non-dominated sorting genetic algorithm II(NSGA-II)[5] is one of the most popular multi-objective EAs based on dominance.It sorts the individuals in the population by their dominance depths to keep the closeness to the PF.Be-sides,NSGA-II prefers the individuals with larger crowding distances to preserve the diversity of distribution along the PF.The main disadvantage of multi-objective EAs based on dominance is the absence of e?cient algorithms to check for non-dominance in a population[4].Therefore,any EA based on dominance exhibits a serious degradation in per-formance as the size N of its population increases. In traditional methods,a MOP can be decomposed into a number of scalar objective optimization subproblems. Zhang et al.borrow this idea from traditional methods to build a more e?cient EA,the multi-objective evolution-ary algorithm based on decomposition(MOEA/D)[6],[7]. MOEA/D explicitly decomposes a MOP into N scalar op-timization subproblems with the same decision spaceΩ.It solves these subproblems simultaneously by evolving a pop-ulation of solutions.At each generation,the population is composed of the N best solutions found so far for N sub-problems.An o?spring for each subproblem needs to update T best solutions found so far for its T neighboring subprob-lems.Since T is smaller than N,MOEA/D usually has the lower computational complexity than NSGA-II does. In this letter,we propose a conical area evolutionary algorithm(CAEA)to further improve the computational ef-?ciencies of EAs for bi-objective optimization by introduc-ing a conical partition strategy and a conical area indicator. In contrast with MOEA/D,CAEA not only decomposes the MOP into N scalar subproblems,but also assigns each sub-problem an exclusive decision subsetΩ(k).Moreover,each subproblem uses the conical area as its scalar objective to ?nd a local nondominated solution in its own decision sub-set.Since each o?spring only needs to update the individual for the subproblem over the subset it belongs to,CAEA of-fers a lower computational complexity than MOEA/D does. Copyright c 2012The Institute of Electronics,Information and Communication Engineers LETTER 1421 2.Conical Partition and Conical Area Indicator 2.1Conical Partition Strategy To partition the decision space,an utopia point and a nadir point are ?rst required in the objective space.Given a set of solutions A ?Ω,the utopia point and the nadir point over A are respectively F (A )=(f 1 (A ),f 2(A ))and F (A )=(f 1 (A ),f 2(A ))where f i (A )=min x ∈A f i (x )and f i (A )=max x ∈A f i (x ),i =1,2.For convenience,we transform an objec-tive vector y to y by y =y ?F (A ).After this transformation,the utopia point is at the origin (0,0). De?nition 1(Observation vector).The observation vector for any transformed point y =(y 1,y 2)is V (y )=(v 1(y ),v 2(y )) where v i (y )=y i y 1 +y 2 ,i =1,2. Notice that the direction from the utopia point (0,0)to V (y )is consistent with the one from the utopia point to y .Furthermore,the observation vector has these features:v i (y )≥0,and v 1(y )+v 2(y )=1.Given a prescribed number of divisions N ,a series of uniformly distributed observa-tion vectors V (k )can be de?ned as V (k )=(k N ?1,1?k N ?1),k =0...N ?1.Each vector V (k ) can induce a resulting coni-cal subregion where the observation vector of any point is closer to V (k ) than the other vectors,as shown in Fig.1(a).De?nition 2(Conical subregion).For the central observa-tion vectors V (k )=(k N ?1,1?k N ?1),k =0...N ?1,the region C ={y =(y 1,y 2)|y 1≥0∧y 2≥0}can be divided into N conical subregions:C (k )={y ∈C |k ?0.5N ?1≤v 1(y ) N ?1},k =0...N ?1where k is called the index of the subregion C (k ) .Given a set A ,A (k ) ={x ∈A |F (x )?F (A )∈C (k ) }is called the k -th decision subset of A .If x ∈A and F (x )?F (A )∈C (k ) , we say that x lies in the conical subregion C (k ) .It can be inferred by Def.2that the index of the subregion in which a solution x ∈A lies is k = (N ?1)(f 1(x )?f 1(A )) f 1(x )?f 1(A )+f 2(x )?f 2(A )+12 where · denotes the bottom integral function. 2.2Conical Area Indicator and Local Pareto Optimality Among a variety of quality indicators,the hypervolume in-dicator,which measures the volume of the dominated por-tion of the objective space,is of exceptional interest as it possesses the highly desirable feature of strict Pareto com-pliance.However,It is computationally expensive.In this letter,we borrow the feature of hypervolume to present an e ?cient conical area indicator for bi-objective cases.De?nition 3(Conical area).Let y ∈C (k ) ,0≤k ≤N ?1,y r denote the reference point which should be an approxi-mate in?nity point dominated by all feasible solutions,then the conical area for y is the area of the portion C (y ) =Fig.1(a)Conical subregions and (b)Conical areas in the transformed objective space. {y ∈C (k ) |?(y ?y )∧y ?y r },written as S (y ). In fact,S (y )represents the portion undominated by y in the conical subregion C (k ) in which y lies.Let a = k ?0.5N ?k ?0.5and b =k +0.5 N ?k ?1.5 ,y =(y 1,y 2)∈C (k ),if 1≤k ≤N ?2,the portion C (y )is a concave quadrilateral OL (1)y U (2)as shown in Fig.1(b)where O =(0,0),L (1)=(b y 2,y 2)is the intersection between the line y 2=y 2and the lower bound-ary of C (k ),and U (2)=(y 1,1a y 1)is the intersection between y 1=y 1and the upper boundary of C (k ) .Therefore,the conical area S (y )is the sum of the areas of two triangles OL (1)U (1)and y U (2)U (1)where U (1) =(a y 2,y 2)is the in-tersection between y 2=y 2and the upper boundary of C (k ) : S (y )=0.5(b ?a )(y 2)2+0.51a (y 1?a y 2)2 =0.51a y 12 +0.5b y 22?y 1y 2. (2) However,the reference point y r is required to calcu-late S (y )if y ∈C (0)or y ∈C (N ?1) .The nadir point is used to de?ne (103(f 1(A )?f 1(A )),103(f 2 (A )?f 2(A )))as the reference point y r .If y ∈C (0) ,the portion C (y )is a con-cave pentagon OL (1)y T (1)T (2)as shown in Fig.1(b)where T (1)=(y 1,y r 2)is the intersection between y 1=y 1and y 2=y r 2,and T (2) =(0,y r 2)is the intersection between y 2=y r 2and y 1=0.Thus,S (y )is the sum of areas of a triangle OL (1)U (1) and a rectangle y T (1)T (2)U (1)where U (1) =(0,y 2)is the intersection between y 2=y 2and y 1=0: S (y )=0.5b (y 2)2+(y r 2?y 2)y 1.Similarly,if y ∈C (N ?1),the conical area S (y )=0.51a (y 1)2 +(y r 1?y 1)y 2. Lemma 1.Let y =(y 1,y 2)∈C (k )and y =(y 1,y 2)∈C (k ) , 0≤k ≤N ?1,if y ?y ,then S (y ) ). Proof.First,the cases 1≤k ≤K ?2are taken into consider-ation.In these cases,It can be reached from Equation 2:S (y )?S (y )=0.51a (y 12 ?y 12)+0.5b (y 22?y 22)?(y 1y 2?y 1y 2) =0.5(y 1?y 1)((1a y 1?y 2)+(1a y 1?y 2))+0.5(y 2?y 2)((b y 2?y 1)+(b y 2?y 1)). 1422 IEICE TRANS.FUNDAMENTALS,VOL.E95–A,NO.8AUGUST 2012 Since y ∈C (k ) ,then k ?0.5N ?1≤y 1y 1+y 2 N ?1by Def.2.It follows that a y 2≤y 1 1?y 2≥0and b y 2?y 1>0. Similarly,we have 1a y 1?y 2≥0and b y 2?y 1>0by y ∈C (k ) .Besides,it can be inferred from y ?y that y 1?y 1≥0and y 2?y 2≥0.Therefore S (y )?S (y )≥0. Then the method of proof by contradiction is used to show S (y )?S (y ) 0.Assume that S (y )?S (y )=0.Thus (y 1?y 1)((1a y 1?y 2)+(1a y 1?y 2))=0and (y 2? y 2)((b y 2?y 1)+(b y 2?y 1))=0.Because y ?y , ?i ∈{1,2}:y i ≤y i ∧?j ∈{1,2}:y i i can be reached.With-out loss of generality,suppose that y 1 1>0 and (y 1?y 1)((1a y 1?y 2)+(1a y 1?y 2))=0,we have (1a y 1?y 2)+(1a y 1?y 2)=0.Because 1a y 1?y 2≥0and 1a y 1?y 2≥0, then 1a y 1?y 2=0and 1a y 1?y 2=0.Besides,it can be inferred that y 2?y 2=0from (y 2?y 2)((b y 2?y 1)+(b y 2?y 1))=0,b y 2?y 1>0and b y 2?y 1>0.By y 2?y 2=0,1a y 1?y 2=0and 1 a y 1?y 2=0,we have y 1=y 1∧y 2=y 2,which contradicts y ?y .So the assumption S (y )?S (y )=0must be false. Since S (y )?S (y )≥0and S (y )?S (y ) 0,S (y ) )in the cases 1≤k ≤N ?2.Similarly,we also have S (y ) )in the cases k = 0and k =N ?1.Therefore S (y ) )in all cases. Theorem 1.Given a set A ∈Ω,let A (k )={x ∈A |F (x )? F (A )∈C (k ) },0≤k ≤N ?1,if x ?∈A (k )and ?x ∈A (k ):S (F (x ?)?F (A ))≤S (F (x )?F (A )),then ??x ∈A (k ):x ?x ?. Proof.The proof is by contradiction.First,assuming that there exists x ∈A (k )and x ?x ?,which means ?i ∈{1,2}:f i (x )≤f i (x ?)∧?j ∈{1,2}:f j (x ) and F (x )?F (A )∈C (k ) .By F (x )?F (A )?F (x ?)?F (A )and Lemma 1,we have S (F (x ?)?F (A ))>S (F (x )?F (A ))which contradicts ?x ∈A (k ):S (F (x ?)?F (A ))≤S (F (x )?F (A )).Therefore the assumption must be false and the op-posite ??x ∈A (k ):x ?x ?is proven. Theorem 1tells us that the conical area indicator pos-sesses the feature of local Pareto optimality,which means the solution with the minimal conical area must be non-dominated in the decision subset.3. Conical Area Evolutionary Algorithm MOEA /D decomposes a MOP into N scalar optimization subproblems with the same decision space Ωin the form: minimize g moead ,k (x )=max 1≤i ≤2 {v (k )i |f i (x )?f i (Ω)|} sub ject to x ∈Ω.(3) Thus an o ?spring for each subproblem needs to update T individuals for its T neighboring subproblems.In contrast with MOEA /D,the proposed algorithm,CAEA,not only decomposes the MOP into N scalar subproblems,but also assigns each subproblem an exclusive decision subset Ω(k ).Moreover,the k -th scalar subproblem g caea ,k ,0≤k ≤N ?1,uses the conical area as its scalar objective in the form: minimize g caea ,k (x )=S (F (x )?F (Ω))sub ject to x ∈Ω(k ). (4) The k -th individual in the population of CAEA is just the best solution x k found so far for the subproblem g caea ,k .Only one o ?spring x is reproduced at each generation of CAEA.Since the solutions with smaller conical areas should be pre-ferred in the neighboring conical subregions,CAEA uses an area-based tournament selection AreaTour ().AreaTour ()selects the one with the larger di ?erence between the aver-age conical areas of its two nearest neighbors and its own conical area from two random individuals,as shown below.AreaTour () Output:k -the index of the selected solution in P .1)Randomly select two indexes a ,b from 0...N ?1.2)Set a 1=a ?1and a 2=a +1.If a =0then a 1=2else if a =N ?1then a 2=N ?3.Then b 1and b 2are set similarly in terms of b . 3)If S (F (x a 1)?F )+S (F (x a 2)?F ) 2 ?S (F (x a )?F )>S (F (x b 1)?F )+S (F (x b 2)?F ) 2 ?S (F (x b )?F )then k =a else k =b . Due to the fact that each o ?spring x lies in the conical subregion of only one subproblem,CAEA only needs to up-date the individual associated with this subproblem in terms of conical areas.The conical partition keeps the diversity of distribution and the minimization of conical area as the scalar objective maintains the local Pareto optimality of in-dividuals in the population.The proposed algorithm works as follows. Step 1Initialization: Step 1.1Generate N initial solutions A ={z 0,...,z N ?1}by randomly sampling from Ω. Step 1.2Initialize F =(f 1,f 2)and F =(f 1,f 2) by setting f i =min 0≤j ≤N ?1 f i (z j ),f i =max 0≤j ≤N ?1 f i (z j ). Step 1.3Create a population P ={x 0,...,x N ?1 }where x 0=...=x N ?1=null .Set A =A .For each k =0...N ?1:if A (k ) ?,then x k =arg min z ∈A (k ) S (F (z )?F )and A =A ?x k .For each k =0...N ?1:if x k =null ,then x k =arg min z ∈A d (V (F (z )?F ),V (k ))and A =A ?x k .Set nE =N and L = N 10 .Step 2Evolution: Step 2.1Selection:Set iL =nE mod L .If iL <2,then p 1=iL ×(N ?1)else p 1=AreaTour ().Set p 2=AreaTour (). Step 2.2Reproduction:Produce an o ?spring x from LETTER 1423 x p 1and x p 2using genetic operators.Set nE =nE +1.Step 2.3Update of F and F :For each i =1,2,if f i (x ) Step 2.4Update of x k :Set k 1= (N ?1)(f 1 (x )?f 1 ) f 1(x )?f 1 +f 2(x )?f 2 +12 and k 2= (N ?1)(f 1(x k 1)?f 1) f 1(x k 1)?f 1+f 2(x k 1)?f 2+ 1 2 . If k 2 k 1∨ S (F (x )?F ) ),then set x k 1=x .Step 3Stoping Criterion:If the stopping criterion is not satis?ed,then go to Step 2.Step 4Post-processing:Remove the dominated solutions from the ?nal population P to obtain the approximate PS P .Then output A and the approximate PF F (P ).where · denotes the top integral function,d (·,·)represents the Euclidean distance between two vectors in Step 1.3and mod in Step 2.1denotes the modulus operator.Since the local non-dominated solution with the minimal conical area in a subregion may be dominated by a solution in another subregion occasionally,the post-processing in Step 4is nec-essary to obtain a ?nal set P of global non-dominated so-lutions to approximate the PS.Since it is trivial and time-consuming to ?nd the exact utopian point of the whole de-cision space Ω,a set Ω of all solutions discovered so far by CAEA are used as a substitute for Ωin fact. The main operation in NSGA-II is the fast non-dominated sorting whose computational complexity is O (N 2)at each generation for bi-objective cases.For an o ?-spring of each subproblem,the major computational costs of MOEA /D are to update the individuals of its T neighboring subproblems.Thus MOEA /D has the computational com-plexity of O (NT )for N o ?springs at each generation.The major computational costs of CAEA at each generation are the update operation in Step 2.4.Since each o ?spring needs to update the individual of only one subproblems in Step 2.4,the computational complexity of CAEA is O (1)for an o ?spring and O (N )for N o ?springs.Therefore,if NSGA-II,MOEA /D and CAEA use the same population size and the same stopping criterion,the ratio among their computational complexities is O (N 2):O (NT ):O (N )=O (N ):O (T ):O (1).Since usually T Experimental Results and Analysis In this section,the proposed algorithm CAEA is com-pared with MOEA /D and NSGA-II on six widely used bi-objective test problems:ZDT 1(convex),ZDT 2(non-convex),ZDT 3(nonconvex,disconnected),ZDT 4(convex,multimodal),ZDT 6(nonconvex,nonuniformly spaced)[8],and LZ 2(complicated PS shape)[9].In our experiments,ZDT 1?3use 30decision variables while ZDT 4,6and LZ 2use 10decision variables.All three algorithms are implemented in C ++and run on an Intel Core i72.70GHz PC with 4GB RAM.For the sake of fairness,the population size N = 100 Fig.2Evolution of the average IGD-metric values with the number of function evaluations in three algorithms for six test instances. and the stopping criterion is to reach 25000function eval-uations for all the test instances in all three algorithms in our experiments.The simulated binary crossover (SBX)and polynomial mutation are used in three algorithms to gener-ate a new o ?spring.The distribution indexes in both SBX and the polynomial mutation are set to be 20.The crossover rate is 1.00,while the mutation rate is 1/n ,where n is the number of decision variables.The size T of the neighbor-hood of each weight vector in MOEA /D is set to 20,which is the same as in [6].To assess the overall performance of three algorithms,a total of 30statistically independent runs of each algorithm have been performed for each test instance. A performance metric,the inverted generational dis-tance (IGD)[10],is adopted to assess the overall perfor-mance of the algorithms in our experimental studies.Mea-suring how far the elements in the PF are from those in the discovered frontier,IGD is de?ned as IGD (P ?, B )=1|P ?|Σv ∈P ? d (v,B ),wher e P ?is a set o f uniformly distributed points alon g the PF,B is the discovered frontier,and d (v,B )is the minimum Euclidean distance between v and the el-ements in B .A low value of IGD (P ?,B )indicates that B must be very close to the PF and cover nearly all the exten-sion of the PF.Since the PFs of all six test cases are pro- 1424 IEICE TRANS.FUNDAMENTALS,VOL.E95–A,NO.8AUGUST 2012 Fig.3Plot of the ?nal population and the nondominated frontier found by CAEA in the run with the lowest IGD-metric value.Table 1Average CPU time (in seconds)spent by three algorithms.ZDT1ZDT2ZDT3ZDT4ZDT6LZ2CAEA 0.7960.8180.7960.4450.4100.372MOEA /D 2.178 2.190 2.370 2.036 2.004 1.882NSGA-II 35.54 30.30 35.32 27.01 25.48 27.85 vided [8],[9],1000uniformly distributed points along the PF have been choosen to constitute P ?for each case in our experiments. Figure 2presents the evolution of the average IGD-metric values of the population with the growth of the num-ber of function evaluations in three algorithms for each test instance.Since the IGD-metric values are usually very small,we use the logarithmic scale for the axes of the IGD-metric value in Fig.2to clearly reveal the di ?erences.It is evident from Fig.2that CAEA obtains obviously lower IGD-metric values than MOEA /D and NSGA-II for all the test instances except ZDT 3,which suggests that CAEA is more e ?ective than MOEA /D and NSGA-II to ?nd the ap-proximate frontier with both a better closeness and a better distribution for all the test instances except ZDT 3.In the only case of ZDT 3,CAEA is slightly worse than NSGA-II in terms of IGD-metric although CAEA still outperforms MOEA /D.It could be attributed to the fact that the PF of ZDT 3consists of ?ve disconnected parts,which leads to that there are a fewer number of nondominated solutions in the Pareto frontier obtained by CAEA than NSGA-II since some individuals in the ?nal populations found by CAEA might be dominated by others and be eliminated during the post-processing as shown in Fig.3. Table 1shows the average CPU time in seconds spent by each algorithm for each test problem.Table 1clearly indicates that CAEA among three algorithms needs least CPU time for all test problems.On average,CAEA requires respectively about 35.8%of the time MOEA /D needs and 2.38%of that NSGA-II does for the previous three test cases with 30decision variables.Moreover,there is a larger im-provement in CPU time for the last three cases with only 10decision variables.As we can see,CAEA runs respectively about ?ve times as fast as MOEA /D and more than 60times as fast as NSGA-II for these three cases.This observation is consistent with our analysis of the computational complexi-ties of CAEA,MOEA /D and NSGA-II in Sect.3. As a whole,we can claim that CAEA is computa- tionally much more e ?cient than MOEA /D and NSGA-II while CAEA performs similarly to and even outperforms MOEA /D and NSGA-II in terms of the solution quality.5. Conclusions In this letter,the algorithm CAEA is proposed to further im-prove computational e ?ciencies of EAs for bi-objective op-timization.In CAEA,the objective space of a bi-objective problem is partitioned into a number of conical subregions.Then the bi-objective problem in each subregion is con-verted to a scalar subproblem that adopts the conical area indicator as its scalar objective.We have also proved the lo-cal Pareto optimality of the solution with the minimal con-ical area in each subregion.The experimental results in-dicate that CAEA o ?ers the signi?cantly higher computa-tional e ?ciency than both MOEA /D and NSGA-II while CAEA competes well with MOEA /D and NSGA-II in terms of solution quality.Our future research will focus on ex-panding the study to the cases of three and more objectives.Acknowledgments This work is supported by Natural Science Foundation of Guangdong Province,China (No.S2011040002472),Doctoral Fund of Ministry of Education of China (No.20110172120035),the Fundamental Research Funds for the Central Universities (No.2011ZM0107),and the Youth Science Foundation of Jiangxi Provincial Department of Education (No.GJJ12514). References [1] A.Zhou,B.Y .Qu,H.Li,S.Z.Zhao,P.N.Suganthan,and Q.Zhang, “Multiobjective evolutionary algorithms:A survey of the state of the art,”Swarm and Evolutionary Computation,vol.1,no.1,pp.32–49,2011. [2]P.M.Pradhan,V .Baghel,G.Panda,and B.Mulgrew,“Energy e ?-cient layout for a wireless sensor network using multi-objective par-ticle swarm optimization,”IEEE International Advance Computing Conference,pp.65–70,2009. [3]K.Deb,Multi-Objective Optimization Using Evolutionary Algo-rithms,John Wiley &Sons,New York,NY ,USA,2001. [4] C.A.C.Coello,https://www.360docs.net/doc/2f12353835.html,mont,and D.A.van Veldhuizen,Evolu-tionary Algorithms for Solving Multi-Objective Problems,2nd ed.,Springer,Berlin,Heidelberg,2007. [5]K.Deb,A.Pratap,S.Agarwal,and T.Meyarivan,“A fast and eli-tist multiobjective genetic algorithm:Nsga-ii,”IEEE https://www.360docs.net/doc/2f12353835.html,put.,vol.6,no.2,pp.182–197,2002. [6]Q.Zhang and H.Li,“Moea /d:A multiobjective evolutionary algo-rithm based on decomposition,”IEEE https://www.360docs.net/doc/2f12353835.html,put.,vol.11,no.6,pp.712–731,2007. [7]R.Carvalho,R.Saldanha,B.Gomes,A.Lisboa,and A.Martins, “A multi-objective evolutionary algorithm based on decomposition for optimal design of yagi-uda antennas,”IEEE Trans.Mag.,vol.48,no.2,pp.803–806,2012. [8] E.Zitzler,K.Deb,and L.Thiele,“Comparison of multiobjective evolutionary algorithms:Empirical results,”Evolutionary Compu-tation,vol.8,no.2,pp.173–195,2000. [9]H.Li and Q.Zhang,“Multiobjective optimization problems with complicated pareto sets,moea /d and nsga-ii,”IEEE Trans.Evol. LETTER 1425 Comput.,vol.13,no.2,pp.284–302,2009. [10] E.Zitzler,L.Thiele,https://www.360docs.net/doc/2f12353835.html,umanns,C.M.Fonseca,and V.G.da Fonseca,“Performance assessment of multiobjective optimizers:An analysis and review,”IEEE https://www.360docs.net/doc/2f12353835.html,put.,vol.7,no.2, pp.117–132,2003. 南车四方机车车辆股份有限公司 青岛喜盈门集团公司 青岛广源发集团有限公司 青岛美高集团有限公司 济南山水集团有限公司青岛水泥分公司青岛正进集团有限公司 青岛大农服装有限公司 山东黄岛发电厂 青岛金晶股份有限公司 青岛恒源热电有限公司 青岛浮法玻璃有限公司 青岛压花玻璃有限公司 青岛市圣戈班韩洛玻玻璃有限公司 青岛高合有限公司 青岛浦项不锈钢有限公司 青岛北海船舶重工有限责任公司 青岛经济技术开发区热电燃气总公司 青岛赛轮子午线轮胎信息化生产示范基地 1 即墨市热电厂 青岛即发集团控股有限公司 青岛新源热电有限公司 青岛三湖制鞋有限公司 青岛正大有限公司 青岛高丽钢线有限公司 青岛北汇玻璃有限公司 即墨市双春水泥有限公司 青岛红领服饰股份有限公司 青岛恒光热电有限公司 青岛恒源化工有限公司 青岛天元化工股份有限公司 青岛海王纸业股份有限公司 青岛琅琊台酒业(集团)股份有限公司青岛胶南明月海藻工业有限责任公司 胶南易通热电有限责任公司 青岛泰发集团股份有限公司 青岛东亚轮胎有限公司 青岛康大外贸集团有限公司 胶南供电公司 胶南市水泥厂 2 胶南市海龙福利板纸有限公司 青岛振华工业集团有限公司 青岛德固萨化学有限公司 青岛龙发热电有限公司 青岛恒祥化肥有限公司 青岛世原鞋业有限公司 青岛华威建材有限公司 青岛广源发玻璃有限公司 青岛大明皮革有限公司 青岛昌新鞋业有限公司 青岛衣东纺织有限公司 青岛海尔金塑制品有限公司 山东金湖水泥有限公司青岛分公司 青岛福生食品有限公司 青岛信五皮革有限公司 青岛多福康食品有限公司 胶州天成玻璃工艺品厂 胶州市新纪元帘子布有限公司 青岛昌华集团股份有限公司 青岛热电集团金莱热电有限公司 青岛金浪热电有限公司 3 青岛泰光制鞋有限公司 青岛现代人热力发展有限公司 青岛金浪化工集团有限公司 青岛凤凰东翔印染有限公司 青岛九联集团股份有限公司 青岛海升果业有限责任公司 青岛交河技工塑料有限公司 青岛东方化工股份有限公司 海尔集团公司 青岛崂山玻璃有限公司 青岛啤酒第五有限公司 注意:以下内容请进一步总结! 青岛恒源热电有限公司 目标公司主要从事蒸汽、热水的生产及供应、蒸汽余热发电业务,同时提供供热管道及设施维修、安装业务。据介绍,目标公司开发了循环水供热工程项目,该项目是青岛市获批的第一个清洁发展机制(CDM)项目;前处该项目处于施工建设阶段,预计将于2009年上半年内正式投产。据介绍,目标公司主要负责临港工业区辖区内的蒸汽供应及热网管理,发电业务,对居民的用热服务。 公司成立于2001年,主要从事蒸汽、热水的生产及供应、蒸汽余热发电业务。 青岛恒源热电有限公司位于开发区B区供热范围,拥有12MW的抽凝式汽轮发电机组1台及12MW的背压机组1台,75t/h循环流化床锅炉3台和150t/h锅炉1台,最大供热能力是355t/h,担负着B区的生产、民用供热负荷,主要满足热电厂东部居民小区供热和山东科技大学供热。 青岛恒源热电有限公司位于青岛经济技术开发区临港工业区的中北部,海尔大道与渭河路交界处东北角,渭河路777号。厂区所在地东侧隔宽约100m绿化地为鑫龙物流公司,该公司东侧、距离本项目最近300m处为澳柯玛人才公寓;厂区南侧隔渭河路、绿化带100m处为东小庄村(原村庄平房已搬迁,现建有多座两层复式楼房),该村庄南侧、距离本项目约420m处为山孚日水食品有限公司;项目隔渭河路东南方向约200m处为澳柯玛工业园;西及西南方向隔海尔大道、渭河路均为浦项制铁有限公司;北侧与开发区消防大队以及正友砼业相邻。 企业所在地厂址东南距市中心约8km,东面距前湾港区约4.5km。 现有工程内容:青岛恒源热电有限公司主要服务于黄岛供热分区B 区(齐长城路以北、疏港高速以南、镰湾河以西、柳花泊和珠山以东片区(包括柳花泊),总占地面积约60平方公里)。企业现有锅炉规模为3×75t/h+1×130t/h 循环流化床蒸汽锅炉,总计约355t/h锅炉容量;发电机组规模为1×12MW C12-34.9/0.98(抽凝)+1×12MW B12-4.9/0.98(背压),总计发电装机容量24 MW。 近几年,恒源热电强化能源管理,合理调整运行方式,加强节能技术改造,企业能源管理工作上了一个新台阶,先后通过了“企业能源审计”、“热电联产机组认定”等审核认证工作,被评为“青岛市清洁生产企业”,2007年度“山东省节能先进企业”。 为进一步加强企业能源管理,完善优化企业节能减排工作,公司在本年度开始推行循环经济试点工作。目前,作为试点工作重点项目之一的企业冷渣机改造项目已基本完成,初步具备投运条件,预计本年度六月份正式投入运行。该项目是将循环流化床锅炉的人工排渣(温度一般在900℃),通过加装冷渣机把炉渣余热加热除盐水,将锅炉效率提高1-3%,同时解决人工放渣存在安全隐患、能源浪费以及不环保等问题,项目投资为85万元,年可节标煤700吨。 热能与动力工程专业制热方向认识 实习报告 学院:机电工程学院 班级:热能一班 姓名:徐国庆 学号:201240502013 一.认识实习的目的和任务 1.认识实习的目的: (1)认识实习是四年制高等学校教学活动的实践环节之一; (2)认识实习是对学生进行火力发电厂主机(锅炉、汽轮机)、辅机(换热器、风机、水泵)及其制造厂的设备系统、生产工艺进行认识性训 练,对发电厂热力系统进行整体初步了解。 2.认识实习的任务: (1)对火力发电厂主机的认识实习 实习对象:锅炉本体、汽轮发电机本体。锅炉形式包括煤粉锅炉、循 环流化床锅炉、链条炉、余热锅炉等。汽轮机形式包括凝气式汽轮机、 背压式汽轮机、调节抽汽式汽轮机。 认识内容:设备外形特点、摆放位置、主要性能参数、安全生产常识。 (2)对火力发电厂辅助机械设备的认识实习 实习对象:制粉系统、除尘除灰系统、烟风系统、回热系统、润滑冷 却系统、水油净化系统等。 认识内容:设备外形特点、摆放位置、主要性能参数、安全生产常识。 (3)对火力发电厂设备系统的认识实习 实习对象:火力发电厂主机和辅机工程的系统。 认识内容:设备之间的空间关系、安全生产常识。 3.认识实习的意义 (1)强化学生对专业基础课程的理解 (2)国内火力发电厂的技术发展出现了新进展 CFB锅炉、燃气轮机、余热锅炉、超临界机组、烟气脱硫、布袋除尘、集中控制运行等新技术。 (3)认识实习有利于培养学生的职业精神 (4)认识实习有利于了解机组 (5)认识实习有利于了解机组建设过程 二.捷能汽轮机厂 (1)简介:汽轮机是火力发电厂三大主要设备之一。它是以蒸汽为工质,将热能转变为机械能的高速旋转式原动机。它为发电机的能量转换提供机 械能。 青岛捷能汽轮机集团股份有限公司始建于1950年,是我国汽轮机行业重 点骨干企业。拥有各种数控、数显等机械加工设备2200余台,以200MW 及以下“捷能牌”汽轮机为主导产品,拥有电站汽轮机和工业拖动汽轮 机两大系列产品,能够满足发电、石化、水泥、冶金、造纸、垃圾处理、燃气-蒸汽联合循环、城市集中供热等领域需求,年产能达500台/600万 千瓦以上。中小型汽轮机市场占有率居国内同行业首位,是目前国内中 小型汽轮机最大最强的设计制造供应商和电站成套工程总包商。 公司积极推进品牌战略,率先在汽轮机行业内取得了美国FMRC公司双重 ISO9001国际质量体系认证和ISO1400环境管理体系认证,率先在汽轮机 行业内第一个获得了“中国名牌产品”称号,先后获得了“全国AAA级 信用企业”、“中国优秀诚信企业”、“全国用户满意产品”、“山东 供热管网检修作业指导手册[青岛热电集团] 供热管网检修作业指导手册[青岛热电集团] 供热管网检修作业指导手册[青岛热电集团] 作者:佚名更新时间:2008-12-5 15:55:38 字体: 供热管网检修作业指导手册 1 总则 1.1 为使公司供热管网的维护、检修工作更为规范和科学合理,确保安全运行,制定作业指导手册。 1.2 本作业指导手册适用于公司供热管网的维护、检修及事故抢修。 本作业指导手册供热管网的工作压力限定为: 工作压力不大于1.6MPa(表压),介质温度不大于300?的蒸汽供热管网。 1.3 管网的检修工作应符合原设计要求。 1.4 执行本作业指导手册时,尚应符合国家现行有关标准的规定。 2 术语 2.1 热网维修 热网的维护和检修。本作业指导手册中简称维修。 2.2 热网维护 供热运行期间,在不停热条件下对热网进行的维护工作。本作业指导手册中简称维护。 2.3 热网检修 在停热条件下对热网进行的检修工作。本作业指导手册中简称检修。 2.4 热网抢修 供热管道设备突发故障引起蒸汽大量泄漏,危及管网安全运行或对周边环境、人身安全造成威胁时进行的紧急检修工作。本作业指导手册中简称抢修。 2.5 供热管网 由热源向热用户输送和分配供热介质的管线系统。本作业指导手册中简称热网。 3 维护、检修机构设置、检修人员及设备 3.1 维护、检修机构设置及人员要求 3.1.1客户服务中心是公司高新区内供热管网运行、调度、维护、检修的责任机构,负责高新区内供热管网的维护、检修工作。 3.1.2 供热管冈的维护、检修人员必须经过培训和专业资格考 试合格后,方可独立进行维护、检修工作。供热管网维护、检修人员必须熟悉管辖范围内的管道分布情况、设备及附件位置。维护、检修人员必须掌握管辖范国内供热管线各种附件的作用、性能、构造以及安装操作和维护、检修方法。 3.1.3检修人员出门检修时应穿公司工作服,配戴上岗证,注意礼貌用语,维护公司形象。 3.2 维护、检修用主要设备与器材 3.2.1 供热管网的维护检修部门,应备有维护、检修及故障抢修时常用的设备与器材。 3.2.2检修设备、工具平时摆放在规定位置,检修设备和专用工具要有专人保管,所有设备、工具应保证完好,须保证检修时能够立即投入使用。检修物资也应分门别类码放整齐,方便查找,以保证检修、抢修时不会因为寻找物资配件而耽误时间。每次检修完后都应检查备品备件数量,发现不够时要及时与物质采购部联系进行必要地补充,确保检修时不会因无备品备件而影响检修时间与质量。 招标投标企业报告 青岛西海岸公用事业集团易通热电有限公司新 能源分公司 本报告于 2019年9月22日 生成 您所看到的报告内容为截至该时间点该公司的数据快照 目录 1. 基本信息:工商信息 2. 招投标情况:中标/投标数量、中标/投标情况、中标/投标行业分布、参与投标 的甲方排名、合作甲方排名 3. 股东及出资信息 4. 风险信息:经营异常、股权出资、动产抵押、税务信息、行政处罚 5. 企业信息:工程人员、企业资质 * 敬启者:本报告内容是中国比地招标网接收您的委托,查询公开信息所得结果。中国比地招标网不对该查询结果的全面、准确、真实性负责。本报告应仅为您的决策提供参考。 一、基本信息 1. 工商信息 企业名称:青岛西海岸公用事业集团易通热电有限公司新能 源分公司 统一社会信用代码:91370211334195493K 工商注册号:370211120004502组织机构代码:334195493法定代表人:赵军田成立日期:2015-04-23 企业类型:有限责任公司分公司(非自然人投资或控股的法人 独资) 经营状态:注销 注册资本:/ 注册地址:山东省青岛市黄岛区相公山路723号 营业期限:2015-04-23 至 / 营业范围:为上级公司联系业务。(依法须经批准的项目,经相关部门批准后方可开展经营活动)联系电话:*********** 二、招投标分析 2.1 中标/投标数量 企业中标/投标数: 个 (数据统计时间:2017年至报告生成时间) 2.2 中标/投标情况(近一年) 截止2019年9月22日,根据国内相关网站检索以及中国比地招标网数据库分析,未查询到相关信息。不排除因信息公开来源尚未公开、公开形式存在差异等情况导致的信息与客观事实不完全一致的情形。仅供客户参考。 2.3 中标/投标行业分布(近一年) 截止2019年9月22日,根据国内相关网站检索以及中国比地招标网数据库分析,未查询到相关信息。不排除因信息公开来源尚未公开、公开形式存在差异等情况导致的信息与客观事实不完全一致的情形。仅供客户参考。 2.4 参与投标的甲方前五名(近一年) 截止2019年9月22日,根据国内相关网站检索以及中国比地招标网数据库分析,未查询到相关信息。不排除因信息公开来源尚未公开、公开形式存在差异等情况导致的信息与客观事实不完全一致的情形。仅供客户参考。 2.5 合作甲方前五名(近一年) 截止2019年9月22日,根据国内相关网站检索以及中国比地招标网数据库分析,未查询到相关信息。不排除因信息公开来源尚未公开、公开形式存在差异等情况导致的信息与客观事实不完全一致的情形。仅供客户参考。 三、股东及出资信息 截止2019年9月22日,根据国内相关网站检索以及中国比地招标网数据库分析,未查询到相关信息。不排除因信息公开来源尚未公开、公开形式存在差异等情况导致的信息与客观事实不完全一致的情形。仅供客户参考。 四、风险信息 4.1 经营异常() 截止2019年9月22日,根据国内相关网站检索以及中国比地招标网数据库分析,未查询到相关信息。不排除因信息公开来源尚未公开、公开形式存在差异等情况导致的信息与客观事实不完全一致的情形。仅供客户参考。 4.2 股权出资() 截止2019年9月22日,根据国内相关网站检索以及中国比地招标网数据库分析,未查询到相关信息。不排除因信息公开来源尚未公开、公开形式存在差异等情况导致的信息与客观事实不完全一致的情形。仅供客户参考。 4.3 动产抵押() 截止2019年9月22日,根据国内相关网站检索以及中国比地招标网数据库分析,未查询到相关信息。不排除因信息公开来源尚未公开、公开形式存在差异等情况导致的信息与客观事实不完全一致的情形。仅供客户参考。 4.4 税务信息() 截止2019年9月22日,根据国内相关网站检索以及中国比地招标网数据库分析,未查询到相关信息。不排除因信息公开来源尚未公开、公开形式存在差异等情况导致的信息与客观事实不完全一致的情形。仅供客户参考。 青岛热电集团有限公司成立于1993年,属于国有独资大型热电联产企业,主要担负着青岛市企、事业单位和居民供热及部分发电任务,同时,供热市场辐射黄岛、平度、莱西、即墨、城阳等县市区域。集团公司先后成立了工程公司和具有甲级设计资质的设计院,逐步形成了热电联产、区域锅炉、热网输配等多种供热形式并存,集供热、发电、热力设计、工程施工、热力产品制造经营为一体的完整产业链。 目前,热电集团为全省地方最大供热企业。企业资产总额48亿元,年销售收入16.2亿元,所属企业16个,职工2200余人,年供蒸汽312万吨,年发电能力9.3万千瓦,已建成蒸汽管网145.43公里,热水管网1552.93公里,供(换)热站294座,供热面积3561万平方米,拥有单位用户292家,居民用户28.8万余户。 集团公司先后被评为全国AAA级信用企业、全国建设系统文明服务示范窗口单位、思想政治工作先进单位、企业文化建设先进单位、精神文明建设先进单位;山东省文明单位、节能先进企业、思想政治工作优秀企业;青岛市和工商年度免检企业、安全生产先进单位、廉洁勤政先进单位;山东省供热协会副理事长单位。 自成立以来,公司始终秉承“关爱社会、服务民生”的企业宗旨和“励精图治、锲而不舍”的企业精神,贯彻科学发展,创新经营管理,实现了企业快速发展。1996年在全国供热行业首家推出社会服务责任赔偿制度,1997年在山东省供热行业首家进行了股份制改造,1998年在山东省供热行业首家成功地进行了集团产权制度改革,1999年在全国同行业中首家通过了ISO9001国际质量认证,并先后通过了ISO14001环境管理体系和GB/T28001-2001职业健康安全管理体系认证,2001年公司成为全国供热行业中首家申请注册服务商标的企业,推出“暖到家”服务品牌,并被评为山东省著名商标和服务名牌。“青岛热电”正在逐步步入标准化、规范化、品牌化的发展轨道。 招聘专业及人数: 1、结构专业1人(研究生); 2、建筑专业1人(研究生); 3、技经专业1人(研究生); 4、焊接技术与工程1人; 5、无损检测专业1人; 华能集团所属电厂: 华能丹东电厂华能大连电厂华能上安电厂华能德州电厂华能威海电厂华能济宁电厂华能日照电厂华能太仓电厂华能淮阴电厂华能南京电厂华能南通电厂华能上海石洞口第一电厂华能上海石洞口第二电厂华能长兴电厂华能福州电厂华能汕头燃煤电厂华能汕头燃机电厂华能玉环电厂华能沁北电厂华能榆社电厂华能辛店电厂华能重庆分公司华能井冈山电厂华能平凉电厂华能岳阳电厂华能营口电厂华能邯峰电厂 大唐集团所属: 长山热电厂湖南省石门电厂鸡西发电厂洛阳首阳山电厂洛阳热电厂三门峡华阳发电公司河北马头电力公司唐山发电总厂北京大唐张家口发电总厂兰州西固热电有限公司合肥二电厂田家庵发电厂北京大唐高井发电厂永昌电厂北京大唐陡河电厂南京下关发电厂安徽淮南洛河发电厂保定热电厂略阳发电厂微水发电厂峰峰发电厂含岳城电站天津大唐盘山发电公司内蒙大唐托克托发电公司保定余热电厂华源热电有限责任公司阳城国际发电有限公司辽源热电有限责任公司四平发电运营中心长春第二热电有限公司晖春发电有限责任公司鸡西热电有限责任公司佳木斯第二发电厂台河第一电厂江苏徐塘发电有限公司安徽省淮北发电厂安徽淮南洛能发电公司安阳华祥电力有限公司许昌龙岗发电有限公司华银电力株洲发电厂华银株洲发电公司金竹山电厂华银金竹山火力发电厂湘潭发电有限责任公司湖南省耒阳发电厂灞桥热电有限责任公司灞桥热电厂陕西渭河发电厂陕西延安发电厂陕西韩城发电厂永昌发电厂甘肃甘谷发电厂甘肃八0三发电厂甘肃连城发电厂甘肃兰西热电有限公司广西桂冠电力股份公司桂冠大化水力发电总厂广西岩滩水电厂陈村水力发电厂王快水电厂张家界水电开发公司贺龙水电厂鱼潭水电厂陕西石泉水力发电厂石泉发电有限责任公司甘肃碧口水电厂百龙滩电厂华电所属: 1中国华电工程(集团)有限公司2华电煤业集团有限公司3华电财务有限公司4华电招标有限公司5华信保险经纪有限公司6北京华信保险公估有限公司7河北热电有限责任公司8包头东华热电有限公司(在建)9内蒙古华电乌达热电有限公司(在建)10华电国际电力股份有限公司11华电国际电力股份有限公司邹县发电厂(扩建)12华电国际电力股份有限公司莱城发电厂13华电国际电力 青热电〔2010〕121号 青岛热电集团有限公司 关于实施供热计量收费工作的意见 各单位、处室: 为全面贯彻《山东省物价局、山东省住房和城乡建设厅关于推进供热计量改革的指导意见》,根据青热办【2010】25号文件要求,自2010年开始,新供热建筑及完成供热计量改造的既有居住建筑,取消以面积计价收费,实行按用热量计价收费,为做好供热计量收费工作,经研究确定以下实施意见: 一、实施计划 (一)对已经改造完成的既有居住建筑实施供热计量收费,明细如下:第一热力海信慧谷、丰华园、弘信花园、都市名家小区;第二热力公司天宝苑小区;金河热力公司荣馨苑小区。 (二)对新竣工非居住建筑全面按用热量计量收费。 二、实施措施: (一)加强组织领导,责任到位。 职责明确,责任到人。集团成立以董事长为组长,总经理为副组长的供热计量工作领导小组,工程开发处、生安处、财务处、服务处各司其职,全力做好供热计量收费实施工作。各所属生产单位必须成立工作领导小组,将宣传、收费、数据公示、政策答疑等工作落实到位,各单位要有专门的供热计量工作负责人。 (二)措施到位,计划周密。 责任部门要全力做好实施热计量收费工作的计划安排,配合相关科室做好用户协调、宣传、合同签订、数据公示以及收、退费工作。 (三)做好新建、竣工项目供热计量设施的管理工作。各相关部门要严格新建、在建、新竣工项目供热计量设施的审核、把关、验收和问题汇总工作。 三、工作要求 (一)做好用户宣传、解释工作。在张贴用户通知进行宣传的同时,相关人员要明确供热计量工作实施相关要求规定,收费方式以及供热调节方式等,做好对用户的宣传解释工作,让用户明白调节方式和收退费方式、时间等。 (二)做好用户结算工作。用户的供热计量数据要真实、准确,各单位要认真做好用户仪表底数(正式供热时间和停止供热时间)确认工作,并定时张贴通知公开热量数据。 (三)做好数据分析和总结。对供热数据按周期进行定 1建设项目概况 1.1建设项目背景及建设地点 1.1.1建设项目背景 青岛钢铁有限公司(以下简称青钢)始建于1958年,位于青岛市北李沧区,属城市钢铁厂。厂区东邻重庆路、南渠村;西围墙距胶济铁路约85m;北距流亭国际机场约3.8km;南靠遵义路。距市中心约15km,厂内铁路专线与胶济铁路娄山站接轨,全厂总占地面积不足1.3km2。 青钢是集焦化、烧结、炼铁、炼钢、轧钢、发电等为一体的钢铁联合企业,是山东省重要的优质棒线材生产基地,山东省三大钢铁支柱企业。 目前,青钢已形成年产铁、钢、材各400×104t的生产能力。其主要生产设施有:60×104t焦化厂;2×50m2烧结机,2×105m2烧结机;5×500+1×625m3高炉;一炼钢有4×35t转炉,5座30tLF精炼炉,3台4机4流R5m小方坯连铸机和1台4机4流R8m连铸机;二炼钢有2×80t 顶底复吹转炉,3座90tLF精炼炉,1座90tRH精炼炉,2台6机6流R9m 连铸机;轧钢车间有1#、2#、3#高速线材车间,复二重线材车间,半连续小型车间,横列式小型车间,还有与之配套的相应公辅设施。 青钢产品有:热轧盘条,热轧带肋钢筋、圆钢、扁钢等型钢。主要品种有:焊接用钢盘条、汽车用弹簧扁钢、硬线盘条、冷镦钢、PC钢棒用线材、拉丝线材、易切削钢、优质碳素结构圆钢、建筑用线材与螺纹钢等。2011年,青钢生产生铁330.69×104t、钢318.27×104t、钢材301.99×104t。2011年工业总产值297.79亿元,工业销售产值299.47亿元。青钢现有产品以优特钢为主,品种结构具有特色,产品附加值高。青钢现有职工1万余人,其中各类工程技术人员约1500余人。 自1997年以来,青钢经过不断的技术改造,其生产能力和经济效益均有了较大幅度的提高,但由于历史原因,还存在许多问题,如产品结构性矛盾仍青岛市重点用能企业名单
青岛恒源热电
认识实习报告(青岛东亿热电厂)
供热管网检修作业指导手册[青岛热电集团]
青岛西海岸公用事业集团易通热电有限公司新能源分公司_中标190922
青岛热电集团有限公司简介
五大电力发电厂及下属详细
(集团发布)青岛热电集团有限公司关于实施供热计量收费工作的意见
青岛钢铁公司城市钢厂环保搬迁项目环境影响报告书