FISHER_DVC6000定位器调试说明

D 102758X 012
FIELDVUE R DVC6000 Series Digital Valve
Controllers
FIELDVUE R
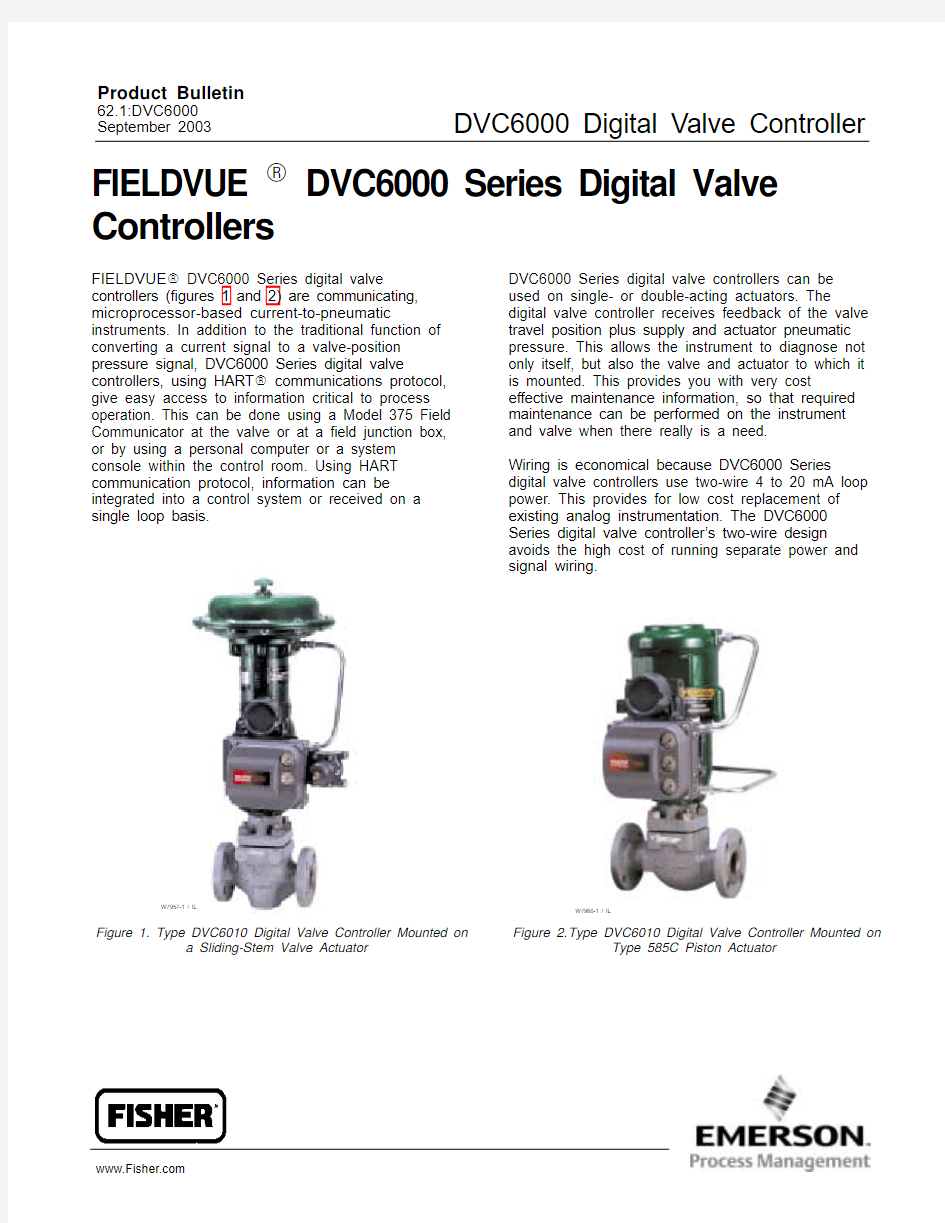
DVC6000 Series digital valve
controllers (figures 1 and 2) are communicating,microprocessor-based current-to-pneumatic
instruments. In addition to the traditional function of converting a current signal to a valve-position pressure signal, DVC6000 Series digital valve
controllers, using HART R communications protocol,give easy access to information critical to process operation. This can be done using a Model 375 Field Communicator at the valve or at a field junction box,or by using a personal computer or a system console within the control room. Using HART communication protocol, information can be integrated into a control system or received on a single loop basis.
W7957-1 / IL
Figure 1. Type DVC6010 Digital Valve Controller Mounted on
a Sliding-Stem Valve Actuator DVC6000 Series digital valve controllers can be used on single- or double-acting actuators. The
digital valve controller receives feedback of the valve travel position plus supply and actuator pneumatic pressure. This allows the instrument to diagnose not only itself, but also the valve and actuator to which it is mounted. This provides you with very cost
effective maintenance information, so that required maintenance can be performed on the instrument and valve when there really is a need.
Wiring is economical because DVC6000 Series
digital valve controllers use two-wire 4 to 20 mA loop power. This provides for low cost replacement of existing analog instrumentation. The DVC6000Series digital valve controller’s two-wire design
avoids the high cost of running separate power and signal wiring.
W7960-1 / IL
Figure 2. Type DVC6010 Digital Valve Controller Mounted on
Type 585C Piston Actuator
(continued) 2
actuator has been tested to 15 meters (50 feet) maximum without performance degradation.
2. These terms are defined in ISA Standard S51.1.
3. Normal m3/hr--Normal cubic meters per hour at 0_C and 1.01325 bar, absolute; Scfh--Standard cubic feet per hour at 60_F and 1
4.7 psia.
4. Values at 1.4 bar (20 psig) based on a single-acting direct relay; values at
5.5 bar (80 psig) based on double-acting relay.
5. Not applicable for Type DVC6020 digital valve controllers in long-stroke applications or remote-mounted Type DVC6005 digital valve controllers with long pneumatic tubing lengths.
6. Approvals for remote-mounted units are pending.
7. The Low Bleed Relay is offered as standard relay for DVC6000 ESD tier, used for On/Off applications.
Features
D Improved Control—Two-way digital communications give you current valve conditions. You can rely on this real-time information to make sound process management decisions. By analyzing valve dynamics through AMS ValveLink Software , you can identify control areas needing improvement and maintain a high level of system performance. D Environmental Protection—You can avoid additional field wiring by connecting a leak detector or limit switch to the auxiliary terminals in the
DVC6000 Series digital valve controller. In this way, the instrument will issue an alert if limits are exceeded.
3
4D Enhanced Safety—You can check instrument
and valve operation and keep the process running smoothly and safely from a remote location. Access is possible at a field junction box, marshalling panel, or within the safety of the control room using either a 375 Field Communicator, a notebook PC, or a system workstation. Your exposure to hazardous environments is minimized and you can avoid having to access hard-to-reach valve locations.
D Hardware Savings—DVC6000 Series digital valve controllers, when used in an integrated system, allow you to realize significant hardware and installation cost savings by replacing other devices in the process loop, such as positioners and limit switches, with a FIELDVU
E digital valve controller.
D Built to Survive—Field-tough DVC6000 Series digital valve controllers have fully encapsulated printed wiring boards that resist the effects of vibration, temperature, and corrosive atmospheres.
A separate weather-tight field wiring terminal box isolates field-wiring connections from other areas of the instrument.
D Increased Uptime—With the self-diagnostic capability of DVC6000 Series digital valve controllers, you can answer questions about a valve’s performance, without pulling the valve from the line. You can run diagnostics (I/P and relay integrity, travel deviation, and on-line friction and deadband analysis and trending) while the valve is in service and operating. You can also compare the present valve/actuator signature (bench set, seat load, friction, etc.) against previously stored signatures to discover performance changes, before they cause process control problems.
D Faster Commissioning—The two-way communication capability allows you to quickly commission loops by remotely identifying each instrument, verifying its calibration, reviewing stored maintenance notes, and more.
D Easy Maintenance—DVC6000 Series digital valve controllers are modular in design. The single master module can be removed from the instrument housing without disconnecting the field wiring, pneumatic connections or stem linkages. This module contains the critical sub-modules so component removal is quick and simple.
Diagnostics
DVC6000 Series digital valve controllers are packed with user-configurable alerts and alarms. When integrated with a HART communication-based system, these flags provide real-time notification of current and potential valve and instrument problems. With AMS ValveLink R Software, tests can be performed to identify problems with the entire control valve assembly. Diagnostic capabilities available are Performance Diagnostics (PD) and Advanced Diagnostics (AD).
Performance Diagnostics
Performance Diagnostics enables the use of diagnostics while the valve is in service and operating.
D Red/Yellow/Green Condition Indicator
(see figure 3)
D I/P and Relay Integrity Diagnostic
D Travel Deviation Diagnostic
D1-Button Diagnostic
D On-Line Friction and Deadband Analysis
(see figure 4)
D Friction and Deadband Trending
While all diagnostics can be run while the valve is inline, only the Performance Diagnostics can be performed while the valve is in service and operating.
5
ERROR
(RED)
NO CONDITIONS HAVE BEEN DETECTED
(GREEN)
Figure 3. Red/Yellow/Green Condition Indicators, Shown in AMS ValveLink Software
Figure 4. Valve Friction and Deadband Analysis
Advanced Diagnostics
Advanced Diagnostics include the following dynamic scan tests:
D Valve Signature (see figure 6)D Dynamic Error Band D Instrument Drive Signal
These diagnostic scans vary the positioner set point at a controlled rate and plot valve operation to determine valve dynamic performance. The valve signature test allows you to determine the
valve/actuator friction, bench set, spring rate, and seat load. The Dynamic Error Band test is a combination of hysteresis and deadband plus “slewing.” Hysteresis and deadband are static measurements. However, because the valve is moving, a dynamic error, or “slewing” error is introduced.
Dynamic scan tests give a better indication of how the valve will operate under process conditions which are dynamic, not static.
The Step Response Test checks the valve
assemblies response to a changing input signal. and plots travel versus time. The end results of this test allow you to evaluate the dynamic performance of the valve. The Performance Step Test (25
pre-configured points) provides a standardized step test with which to evaluate your valve performance.It utilizes small, medium and large changes.Advanced Diagnostics are performed with AMS ValveLink Software . The valve must be out of
service for Advanced Diagnostics to be performed.
6
W8082 / IL
HART MULTIPLEXER
Control System I/O
4-20 mA
+
HART
Figure 5. Integrate Information from the Digital Valve Controller into a Non-HART Compatible Control System With AMS ValveLink
Software’s Modbus Interface
W7468/IL
Figure 6. The Valve Signature Display
Integration
D Non-HART Systems—Because DVC6000
Series digital valve controllers operate with a
traditional 4 to 20 mA control signal, they directly
replace older analog instruments.
Microprocessor-based electronics provide improved
performance along with repeatable and reliable
configuration and calibration.
D Modbus with AMS ValveLink Software and
HART Multiplexers—HART communication allows
you to extract more value from DVC6000 Series
digital valve controllers beyond their inherent
improved performance. When integrated into a
multiplexer network and using AMS ValveLink
Software, the device and valve information is
real-time. From the safety of a control room, multiple
instruments can be monitored for alerts and alarms.
Additionally, tasks such as configuration, calibration
and diagnostic testing do not require special trips to
the field. AMS ValveLink Software can communicate
via Modbus to the distributed control system (DCS)
to provide critical information such as valve travel
alerts and alarms (figure 5).
D Integrated Control System—A control system
with HART communication capabilities has the ability
to directly gather information from DVC6000 Series
digital valve controllers. Information such as valve
travel, alerts and alarms can be seamlessly
accessed to provide a view into the field device from
the safety of the control room.
7
1200 Hz “1”
2200 Hz “0”
AVERAGE CURRENT CHANGE DURING COMMUNICATION = 0
A6174/IL
Figure 7. HART r
Frequency Shift Keying Technique
Figure 8. Perform Configuration and Calibration at the Valve or Anywhere on the 4 to 20 mA Loop with the Model 375
Field Communicator
Communication
HART Protocol Overview
The HART (Highway Addressable Remote Transducer) protocol gives field devices the
capability of communicating instrument and process data digitally. This digital communication occurs over the same two-wire loop that provides the 4 to 20 mA process control signal, without disrupting the process signal (figure 7). In this way, the analog process signal, with its faster response, can be used for control. At the same time, the HART digital communication gives access to calibration,configuration, diagnostic, maintenance, and
additional process data. The protocol provides total system integration via a host device.
Model 375 Field Communicator
You can perform configuration and calibration at the valve or anywhere on the two-wire loop via a Model 375 Field Communicator (figure 8). Powerful tools such as the Setup Wizard and Auto Travel
Calibration automate the tasks of commissioning DVC6000 Series digital valve controllers. These
automation tools not only save time, but also provide accurate and repeatable results.
AMS ValveLink Software
AMS ValveLink Software is a Windows-based software package that allows easy access to the information available from DVC6000 Series digital valve controllers.
Using AMS ValveLink Software, you can monitor the performance characteristics of the valve and obtain vital information without having to pull the valve from the line. I/P and Relay Integrity and Travel Deviation Diagnostics, as well as On-Line Friction and
Deadband Analysis and Trending can be run while the valve is in service and operating. Valve
Signature, Dynamic Error Band, and Step Response are displayed in an intuitive user-friendly
environment that allows easy interpretation of data.Diagnostic graphs can be superimposed over those previously stored to view areas of valve degradation.This allows plant personnel to concentrate efforts on equipment that needs repair, avoiding unnecessary maintenance. This diagnostic capability is readily accessible and available to you either in the control room or on the plant floor. In addition to the diagnostic features, AMS ValveLink Software
contains an Audit Trail, Batch Runner for automating repetitive tasks, and Trending to view valve performance.
AMS ValveLink Software provides integration into AMS and DeltaV, with HART and Fieldbus communications.
TRAVEL SENSOR
TERMINAL BOX
TERMINAL BOX COVER
PRINTED WIRING BOARD ASSEMBLY
I/P CONVERTER
PNEUMATIC RELAY
GAUGES
COVER
W8083-1 / IL
Figure 9. DVC6000 Series Digital Valve Controller Assembly (valve-mounted instrument)
Principle of Operation
DVC6000 Series instruments (figures 9 and 10) receive a set point and position the valve where it needs to be.
D The input signal provides electrical power and the set point simultaneously. It is routed into the terminal box through a twisted pair of wires.
D The input signal is then directed to the printed wiring board assembly where the microprocessor runs a digital control algorithm resulting in a drive signal to the I/P converter.
D The I/P converter assembly is connected to supply pressure and converts the drive signal into a pressure output signal.
D The I/P output is sent to the pneumatic relay assembly. The relay is also connected to supply pressure and amplifies the small pneumatic signal from the I/P converter into a single larger pneumatic output signal used by a single-acting actuator. For double-acting actuators, the relay accepts the pneumatic signal from the I/P converter and provides two pneumatic output signals.
D The change in relay output pressure to the actuator causes the valve to move.
D Valve position is sensed through the feedback linkage by the instrument’s travel sensor. The travel sensor is electrically connected to the printed wiring board to provide a travel feedback signal used in the control algorithm.
The valve continues to move until the correct position is attained.
8
E0408 / IL
Figure 10. DVC6000 Series Digital Valve Controller Block Diagram
Installation
The Type DVC6010 digital valve controller is designed for yoke mounting to sliding stem actuators. Type DVC6020 digital valve controllers are designed for mounting to rotary actuators or long stroke sliding stem actuators (over 4-inches travel). Type DVC6030 digital valve controllers are designed for mounting on virtually any quarter-turn actuator. Dimensions for valve-mounted instruments are shown in figures 11, 12, and 13. Dimensions for remote-mounted instruments are shown in figures 14 and 15.
The Type DVC6005 digital valve controller base unit may be remote mounted on 2-inch pipestand or wall. The remote-mounted Type DVC6005 base unit connects to the Type DVC6015, DVC6025, or
DVC6035 feedback unit mounted on the actuator. Feedback wiring and pneumatic tubing to the control valve assembly must be connected in the field.
9
10
2 MOUNTING HOLES 8.6 (0.34)
1/4-18 NPT
OUTPUT CONN B
28.6(1.13)
122.8(4.84)
144.5(5.69)
210.7(8.29)
148.7(5.85)
ACTUATOR CENTERLINE
1/4-18 NPT
OUTPUT CONN PLUGGED
1/2-14 NPT
CONDUIT CONN BOTH SIDES 1/4-18 NPT
OUTPUT CONN A 1/4-18 NPT VENT CONN
TYPE 67CFR 1/4-18 NPT
SUPPLY CONN
Figure 11. Dimensions for Type DVC6010 Digital Valve Controller with Integrally Mounted Filter Regulator
4 MOUNTING HOLES j 95.3(3.75)
158.1(6.23)
156.3(6.16)
1/2-14 NPT
CONDUIT CONN BOTH SIDES 1/4-18 NPT
OUTPUT CONN A TYPE 67CFR 1/4-18 NPT
SUPPLY CONN
19B3557-A E0406 / IL
mm
(INCH)
Figure 12. Dimensions for Type DVC6020 Digital Valve Controller with Integrally Mounted Filter Regulator
19B3558-A E0407 / IL
mm (INCH)
Figure 13. Dimensions for Type DVC6030 Digital Valve Controller with Integrally Mounted Filter Regulator
11
PIPESTAND MOUNTED
10C1795-A / DOC
10C1796-A / DOC
234184mm (INCH)
WALL MOUNTED
64(2.50)
57(2.25)
72(2.82)
HOLES 0.86 (0.34)
Figure 14. Dimensions for Remote-Mounted Instruments--Type DVC6005 Base Unit
The digital valve controllers are 4 to 20 mA loop powered and do not require additional power.
Electrical connections are made in the terminal box.All pressure connections on the digital valve
controllers are 1/4-inch NPT female connections.The digital valve controller outputs are typically connected to the actuator inputs using 3/8-inch diameter tubing. Remote venting is available.
Ordering Information
Note: Fisher does not assume responsibility for the selection, use, or maintenance of any
product. Responsibility for proper selection, use,and maintenance of any Fisher product remains solely with the purchaser and end user.
When ordering, specify:1. Actuator type and size
2. Maximum actuator travel or rotation
3. Options
a. Supply pressure regulator
b. Supply and output gauges
c. HART filter
d. Stainless steel housing (valve-mounted instruments only)
e. Remote mounting
TYPE DVC6015 SLIDING STEM ACTUATOR MOUNTING
UP TO 102 mm (4?INCH) TRAVEL TYPE DVC6025 ROTARY AND LONG?STROKE SLIDING STEM
ACTUATOR MOUNTING
E0867 / IL
10C1799-A
E0869 / IL
TYPE DVC6035 ROTARY ACTUATOR SHAFT MOUNTING
10C1798-A E0868 / IL
mm (INCH)
(4.50)
(3.00)38(1.50)
HOLES
1/4 - 20 UNC
46(1.83)
46(1.81)
67103135120CONDUIT CONN
Figure 15. Dimensions for Remote-Mounted Instruments--Feedback Units
Fisher
Marshalltown, Iowa 50158 USA Cernay 68700 France Sao Paulo 05424 Brazil Singapore 128461The contents of this publication are presented for informational purposes only, and while every effort has been made to ensure their accuracy,they are not to be construed as warranties or guarantees, express or implied, regarding the products or services described herein or their use or applicability. We reserve the right to modify or improve the designs or specifications of such products at any time without notice.Fisher does not assume responsibility for the selection, use or maintenance of any product. Responsibility for proper selection, use and maintenance of any Fisher product remains solely with the purchaser and end-user.FIELDVUE, ValveLink and Fisher are marks owned by Fisher Controls International LLC, a business of Emerson Process Management. The Emerson logo is a trademark and service mark of Emerson Electric Co. HART is a mark owned by the HART Communications Foundation.All other marks are the property of their respective owners. This product may be covered under one or more of the following patents (5,451,923; 5,434,774; 5,439,021; 5,265,637) or under pending patent applications.
Emerson Process Management https://www.360docs.net/doc/2e12640308.html,
ABB定位器说明书
A B B定位器说明书-CAL-FENGHAI.-(YICAI)-Company One1
ABB智能定位器故障判断 1、气缸给信号不动:将运行操作模式设为(手动),通过操作增加和 减少键,观察OUT1和OUT2是否有输出。两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。 2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应 在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这 个范围内,故障出在 DCS接口或传输导线上。 3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是 否接线正确,没问题需要确定11 、12端子电压是否在之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。 4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操 作模式设为(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。 5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不 在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。 ABB TZID-C智能定位器安装及操作说明书 (仅供调试维修人员使用参考) ※气动连接 ·使用与定位器气源端口处标识的标准接口连接气源 ·连接定位器的输出与气动执行器的气缸 ※电气连接 ※调试步骤 1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力 为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力); 2. 接通4---20mA输入信号。(定位器的工作电源取自输入信号,由DCS二线制供电,端电 压为左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路); 3. 检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试
ABB定位器调试步骤(一口清)
ABB定位器调试步骤(一口清) 1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(4- 6 BAR)。 2. 接通 4---20mA 输入信号。(定位器的工作电源取自输入信号,由 DCS 二线制供电,不能将 DC24V 直接加至定位器,否则有可能损坏定位器电路)。 3. 检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):?按住 MODE 键。?并同时点击?或?键,直到操作模式代码 1.3 显示出来。?松开 MODE 键。?使用?或?键操作,使执行器分别运行到两个终端位置,记录两终端角度?两个角度应符合下列推荐角度范围(最小角位移 20 度,无需严格对称)直行程应用范围在 -28o--- +28o之内。角行程应用范围在 -57o--- +57o之内。全行程角度应不小于 25o 4. 切换至参数配置菜单?同时按住?和?键?点击 ENTER 键?等待 3 秒钟,计数器从 3 计数到 0 ?松开?和?键程序自动进入 P1.0 配置菜单。 5. 使用?和?键选择定位器安装形式为直行程或角行程。角行程安装形式(rotary):定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心, 一般角位移为 90o直行程安装形式(linear):定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角
位移小于 60o, 用于驱动直行程阀门气动执行器。 注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。出厂时的缺省设置为:linear 6. 启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定):方法 1:?按住 MODE 键?点击?键一次或多次,直到显示出“P1.1”?松开 MODE 键?按住 ENTER 键直到计数器倒计数到 0 ?松开 ENTER 键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。?自动调整程序顺利结束后,显示器显示“COMPLETE”。?参见步骤 10,进行手动存储上述自动调整得到的参数。方法 2(推荐):?按住MODE键(linear安装形式)或者ENTER(rotary安装形式)键 3 秒,直到出现“Oo”?松开 MODE 键(linear 安装形式)或者 ENTER(rotary 安装形式)?按住 MODE 键(linear)或者 ENTER(rotary)键直到计数器倒计数到 0 ?松开 MODE 键(linear)或者 ENTER(rotary)键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。?自动调整程序顺利结束后,会自动存储上述自动调整得到的参数,并自动切换控制方式到 1.1 CTRL_FIX 在自动调整过程中如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查出故障原因。也可以人为地强制中断自动调整程序。
ABB定位器中文说明书
气路连接 ?使用与定位器气源端口处标识的标准接口连接气源 ?连接定位器的输出与气动执行器的气缸 电气连接 根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32) +11 -12 控制信号输入端子(DC4---20mA,负载电阻Max.410欧姆) +31 -32 位置返馈输出端子(DC4---20Ma,DCS+24V供电) +41 -42 全关信号输出端子(光电耦合器输出) +51 -52 全开信号输出端子(光电耦合器输出) +81 -82 开关信号输入端子(光电耦合器输入) +83 -84 报警信号输出端子(光电耦合器输出) +41 -42 低位信号输出端子(干簧管接点输出,5---11VDC, <8 mA) +51 -52 高位信号输出端子(干簧管接点输出,5---11VDC, <8 mA) 调试步骤 1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气 压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。 2.接通4---20mA输入信号。(定位器的工作电源取自输入信号,由DCS二线制供 电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。 3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货 商安装调试完毕,只需作检查确认,该步并非必须): ?按住MODE键。 ?并同时点击?或?键,直到操作模式代码1.3显示出来。 ?松开 MODE键。 ?使用?或?键操作,使执行器分别运行到两个终端位置,记录两终端角度 ?两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28o--- +28o 之内。 角行程应用范围在 -57o--- +57o 之内。 全行程角度应不小于25o 4.切换至参数配置菜单 ?同时按住?和?键 ?点击ENTER键 ?等待3秒钟,计数器从3计数到0 ?松开?和?键 程序自动进入P1.0配置菜单。 5.使用?和?键选择定位器安装形式为直行程或角行程。 角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心
ABB定位器的调试步骤
ABB定位器调试步骤: 1、接通气源前,先将气源管放空一段时间以排除管路中可能存在的灰尘、杂质、水、油等。建议放空时间30 分钟,可以用手或者白纸、白布进行气源质量的检查。声明:如由于灰尘、杂质、水、油等造成定位器的损坏,ABB 将不提供质保。检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为 6 BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。 2、接通4---20mA 输入信号。(定位器的工作电源取自输入信号,由DCS 二线制供电,直接加至定位器的电压不能超过30V / 50mA,否则有可能损坏定位器电路)。 3、检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须): ?按住MODE 键。 ?并同时点击?或?键,直到操作模式代码 1.3 显示出来。 ?松开MODE 键。
?使用?或?键操作,使执行器分别运行到两个终端位置,记录两终端角度?两个角度应符合下列推荐角度范围(最小角位移20 度,无需严格对称) 直行程应用范围在-28o--- +28o之内。 角行程应用范围在-57o--- +57o之内。 全行程角度应不小于25o 若角度未符合上述要求,则需通过调节反馈杆、联轴器或者定位器的安装位置使得角度值满足上述要求。 4、启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定):方法1:用于直行程阀门 ?按住MODE 键 5 秒,直到出现“ADJ_LIN” ?松开MODE 键 ?再按住MODE 键直到显示器上计数器倒计数到0 ?松开MODE 键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。 ?自动调整程序大约需要 5 分钟左右,顺利结束后定位器会自动存储上述自动调整得到的参数,并自动切换控制方式到 1.1 CTRL_FIX 方法2:用于角行程阀门 ?按住ENTER 键 5 秒,直到出现“ADJ_ROT” ?松开ENTER 键 ?再按住ENTER 键直到显示器上计数器倒计数到0 ?松开ENTER 键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。
智能变送器说明书
电容式智能变送器 使用说明书 安徽埃克森科技集团有限公司
目录 简介 第一节工作原理 (1) 第二节调校 (3) 第三节技术指标 (7) 第四节安装 (9) 第五节绝对压力/压力变送器 (24) 第六节单法兰隔离膜变送器安装 (26) 第七节双法兰隔离膜变送器安装 (27) 第八节维护 (30) 第九节选型指南 (34) 第十节开箱和产品成套性 (35) 附录A HART快捷键操作步骤 (36) 附录B HART通讯器菜单树 (37) 2088HART协议通讯器菜单树 (38)
简介 电容式智能变送器(以下简称变送器)采用先进的集成电路和表面安装工艺,在模拟式变送器的基础上增加了通信、查询、测试、组态等功能,它可提高标定精度,改善环境温度补偿效果,大大提高变送器的质量。 1、变送器应用了先进的数字技术及频率相移键控(FSK)技术,提高了整机性能及可靠性,方便了现场和控制室之间的连接。 2、变送器除具有远程通讯能力外,它还具有本机调量程,调零点按钮,便于现场安装后的就地调整。 3、变送器电子部件采用先进的集成电路和表面安装工艺,具有通信、查询、测试、组态等功能。 第一节工作原理 1. 工作原理 图1-1是变送器的基本工作原理,下面将叙述其工作原理和各部件的功能。 图1-1 变送器工作原理方块图 1.1 “δ”室传感器(敏感元件) 图1-2“δ”室 变送器的核心是一个电容式压力传感器,称为“δ”室(见图1-2)。传感器是一个完全密封的组件,过程压力通过隔离膜片和灌充液硅油传到感压膜片引起位移。传感膜片和两电容极板之间的电容差由电子部件转换成4~20mA DC的二线制输出的电信号。
Fisher定位器使用说明书
Fisher定位器使用说明书 一、Fisher定位器调校基本步骤 1.将375手操器连接到接线端子上,进入菜单 选择 Setup(设置)→Basic setup(基本设置)→Auto setup(自动设 置)→Setup wizard(设置向导) 2.根据Setup wizard的提示选择相应的参数 ⑴instrument mode is in service ,continue for prompts to please out of service. 仪表模式是在线状态,继续须要准时设置为离线状态 选择 Yes. ⑵output will not track input when instrument mode is out of service. 当仪表在离线状态时,仪表的输出将不随输入的变化而变化 选择Yes. ⑶change to out of service to continue. 继续需改变为离线模式 选择out of service 选择enter 说明:仪表正常工作时其模式为in service状态,当对仪表进行调 校时需改为out of service状态。 ⑷Tru/Press select 行程/压力选择 选择Travel control ⑸Pressure units 压力单位 选择psi ⑹Max supply press 最大供气压力 此时输入的最大供气压力值应与空气过滤减压阀的输出压力一致,此 值不宜过大,过大,阀门易损坏,超行程。应调整空气过滤减压阀使 阀门刚好全行程,这时输入此时的压力值。 ⑺Actuator manufacturer 执行机构制造商 选择Fisher controls ⑻Actuator model 执行机构型号 查看阀体上的铭牌,有此执行机构型号,选择相应型号,如667,1035, 1051等。 ⑼Actuator size 执行机构尺寸 查看阀体上的铭牌,有此执行机构尺寸,选择相应尺寸,如30,34, 40,45,50,46,60,70,100等。 ⑽setup wizard is ready to send config to the Drc6000 选择send ⑾use factory default 使用工厂默认,选择Yes. ⑿To finish setting up the value run Auto Travel Calib 完成阀门设置运行自动行程调校,选择OK. ⒀Warning! Calibration will cause sudden changes in instrument output , continue?
PS2西门子智能定位器简明操作指南
PS2阀门定位器简明操作指南 准备: 1.按照操作说明书将PS2与阀门连接. 2.检查并确认电路和气路的连接. 3.通电(4—20mA电流供电). 4.禁止电压供电. 初始化 没有经过初始化的定位器,接入电流信号后,LCD屏幕右下方出现闪烁细体“NOINI”字母.此时按上升键或下降键可以使执行机构动作,LCD屏幕能显示粗黑字体Pxx.x。在没有做初始化前,首先要做到按上升键使阀杆上升到最高,LCD屏幕显示的数值大约在P85~95% 之间,按下降键;使阀杆下降到最低,LCD屏幕显示的数值大约在P5~10%之间,在中间的过程中不能出现P---.--情况,否则需要做一系列的调整。 以直行程调节阀为例: 调节阀杠杆行程<20 mm (阀门开度), 气开阀. 叙说如下; 选择反馈角度33°、量程<=20 mm 和90°、量程>=20 mm,分别利用调节轮和反馈杆长度调整PS2的零点和量程。PS2定位器与阀体固定前,先将反馈杠杆支点调整并固定在反馈杆上刻有33°、15 、20 一侧的20位置左右,U形定位槽与反馈支点配合使用,并与阀体固定. ⑴确定定位器内的33°/90°切换开关置于33°位置,互锁齿轮置于33°(黄颜色)(可参阅与定位器一起提供的资料)。 参见图1. ⑵通电、通气后, 按手键(组态键)>5秒,则会出现1. YFCT 上方黑体显示WAY、再按一下出现2.YAGL,上方黑体显示 33°,每按一下出现下一个新的参数值。 需要给定位器内的程序赋值;参数1设置在WAY, 参数2 设置在33°, 参数3设置在20 mm。 a. 将一字螺丝刀(4mm宽)插入黄颜色轮夹紧轮齿轮状部件内部,向右拨动,松开夹紧装置,向左或者向右转动耦合调节轮,阀杆位移指针指向阀位刻度0%左右时, (与下降键配合使用),使量程下限(液晶显示)在5%~10%左右,并记录其数值为P1。 b. 按上升键,使阀杆指针指向阀位刻度100%左右, 使量程上限(液晶显示)数值连续上升不出现------ 的越限符号。量程范围在90%~98%左右,并记录其数值为P2。 c. 如果显示>100 则重新调整反馈杠杆支点离转轴远一点. d. 如果显示<100 则重新调整反馈杠杆支点离转轴近一点. ⑶位置开关、轮状夹紧装置(黄颜色),都锁紧。(一字螺丝刀向左拨动,则锁紧夹紧装置)如不再需要其它相关参数,可 直接进入A.步骤。 ⑷如需要更多的参数设置,可进入参数设置程序,并确认相关参数(参数1、参数2、-- -- -- -- -- 参数55.) 几个重要参数:(举例.实际操作按照说明书或工艺过程要求设置). 参数1. YFCT (执行机构的类型)WAY (直行程). 参数2. YAGL (反馈角)33° 参数3. YWAL (行程范围)由调节阀行程决定. 参数4. INITA (自动初始化) 参数5. INITM (手动初始化) 参数41. YCUP (紧密关闭值)99%(仅上升). 参数55. PRST (工厂设置)Strt A. 将记录的数值P1或P2进行简单的运算;即:P1+(P2﹣P1)÷2。若;P1量程下限(液晶显示)在4.8%,P2量程上限 (液晶显示)在95%,则:4.8+(95﹣4.8)÷2 = 49.9 。用手健操作,确认阀门开度位置在刻度值50%左右,(液晶显示)开度在50% ±5%左右。 B.在运行模式下,按手键>5秒,进入参数4,则PS2进入自动初始化,在按上升键>5秒,液晶显示‘strt.’之后,随即右下 方逐步出现(Run1、2、3、4、5)之后,右下方显示字体‘FINSH’表示初始化已完成。此时按手键>5秒,退出组态模式,进入运行模式,液晶右下方显示为;Man 字样,表示进入了手动运行模式,再按一下手键,液晶右下方显示为; Aut 字样,表示进入了自动运行模式。此时,输入电流信号,执行机构的行程与将与4 ~20mA相一致。定位器可以正常运行了。
压力变送器使用说明书
安装 ○普通型及小巧型变送器的安装 ①若压力系统有瞬间过压,该变送器过载范围满足系统要求,并配置缓冲阀; ②测量介质应与变送器的结构材料相兼容; ③测量介质不能堵塞变送器的引压孔; ④禁止随意拆卸、碰撞变送器及强行绞拧导线,严禁用异物捅引压孔; ⑤根据产品连续类型,查对现场接口是否与产品一致。若为螺纹接口,应缓速拧紧,注意密封,不能把 转矩直接加到变送器壳体上,只能加在压力接口的六角上。 ○投入式变送器的安装 ●注意事项 ①安装地点的液体可能产生的静压力不能超过变送器的量程; ②测量介质应与变送器的结构材料相兼容; ③测量介质不能堵塞变送器的进液孔; ④安装时要缓速放入或提出,严禁用强力拉扯电缆或用金属等硬物捅压膜片。 ●安装方法 变送器的安装方向为垂直向下,在动水中使用时,应注意使变送器压面与水流方向平行。 1在静水中安装 ①在水池中的安装方法:为防止水泵打水时的冲击抖动变送器或损坏变送器或损坏变送器,应将变送器 原理液体出入口安装。(如图a所示) ②在深井中的安装方法:一般用插钢管的方法,要求钢管不能打弯,内劲必须大于35mm,易上下提动 变动器,在钢管的不同高度上若干小孔,以便水通畅进入管内,必要时,可在变送器上缠烧钢丝,用钢丝上下提动,以免拉断电缆线。(如图b所示)
2在动水中安装 在动水中安装时需加静水装置 ①方法之一:在水道中插入钢管,要求钢管壁稍厚一些,并在其上下不同高度若干个小孔,以阻尼水波和消除动水压力的影响。(如图c所示) ②方法之二:若为清水域的沙石水床,以浅埋为好。(如图d所示)
③方法之三:这种方法即能消除水流压力和波浪的影响又能起到过滤浊水泥沙的作用(如图e所示) ○普通型及投入式变送器接线 信号(电源)端子设置在电气盒的一个独立腔室内。接线前,先拧下表盖,把信号(电源)线从穿线孔穿入,把线接在+、-端子及地上,拧紧表盖和穿线孔螺栓。信号线不要与其它电源线一起穿金属管或放在同一线槽中,也不要再强电设备附近通过。 注意:接好线后,务必将表盖拧紧,以免潮气进入电气盒内,损坏电路。 ○小巧型变送器接线 二线制:1电源正2电源负3外壳 4 三线制:1电源正2电源负(与信号负共用)3信号加4 调试 变送器在出厂前均已严格标定过,用户无须自行标定。传感器膜片和内充硅油的重量,会对传感器芯片产
福斯LogiIQ智能定位器调试说明
福斯L o g i I Q智能定位 器调试说明 This model paper was revised by LINDA on December 15, 2012.
Logix3200IQ智能定位器调试说明 一、简介 Logix3200IQ智能定位器接受4-20mA模拟量输入,4-20mA模拟量输出。 二、定位器操作面板介绍 Logix3200IQ智能定位器就地操作面板由能够自动调校零点和满量程的QUICK-CAL快速调校按钮与可以手动操作定位器的两个点动按钮(↑和↓)以及八个DIP开关和可以调节定位器增益的旋转开关组成。 三、定位器DIP开关的设置 定位器运行之前,首先设置DIP开关,下面就每一个DIP开关的设置进行了说明 1、作用方式 作用方式分气开式(ATO)和气关式(ATC)两种,调试前根据阀门的类型进行设置。 2、阀门关闭的信号 4mA信号4mA时阀门处于全关位置,信号20mA时阀门处于全开位置 20mA信号20mA 时阀门处于全关位置,信号4mA时阀门处于全开位置 3、阀位与信号对应曲线 线性曲线(Linear)阀门位置与信号成线性关系选择曲线(Optional)选择了这个按钮,就激活了下一个DIP开关 4、可选择曲线 %=阀位与信号成等百分比 Custom用户自定义曲线 5、自动校准 on 每次按动QUICK-CAL按钮,定位器就自动调整参数进行调试 off每次调试时,只能根据出厂前的预设置即调节定位器增益的旋转开关的位置进行调试 无论哪一种情况,调节定位器增益的旋转开关都可以进行调节,调节完毕,不用重新进行调试,是即时生效的。 6、稳定性开关 Low-FrictionValves 适用低摩擦力调节阀 High-Friction Valves适用高摩擦力调节阀 7、备用开关 8、定位器调试方式
数字式重量变送器调试说明-压力传感器液位变送器
注意:HDW-A05只支持其中某一种信号输出,而不能同时支持多种输出 HDW-A05系列数字式重量变送器调试说明 Ve rsion:1.0 电源多级稳压电子滤波,确保即使在严酷环境的电源干扰下,也能正常稳定工作 输入输出特性: 输入负载: 350欧姆阻抗的桥式传感器:1~8个; AD 采样率: 40SPS 输入电压: 12~24V@(4~20mA 、0~20mA 、0~5V ),15~24V@(0~10V ); 输出负载: 电压输出: ≥10K Ω; 电流输出: ≤( 供电电压 – 6 )×50,单位:Ω(欧姆); 输出线性: 优于0.05%(0.5‰); 输出纹波: ≤5mVp-p ; 输出范围: 4~20mA : 至少3~21mA ; 0~5V : 至少-0.1~5.1V ; 0~10V : 至少-0.2~10.2V ; 整机温漂: ≤80PPM/℃(0~40℃); ≤150PPM/℃(-20~60℃); 整机耗电: ≤12mA@1个350欧姆传感器,24V 供电电压; 综合精度: 优于0.2%(@30℃温差)。 设置滤波系数: 为满足各种不同场合的应用需求,HDW-A05变送器设置了滤波系数设置功能,用户可以结合自己的实际应用对速度和精度的要求,合理选择滤波系数,以达到速度和精度的最佳平衡。 在断电状态下,同时按住“K1”和“K2”不放,然后给变送器通电,等待LED 持续点亮后,松开2个按键,此时,LED 开始进入“闪烁亮几次,然后熄灭大约1秒多,再闪烁……”的循环,一个闪烁周期里连续闪亮的次数就是滤波系数(范围1~12,系数越小,输出响应速度越快,但噪声越大;系数越大,输出响应速度越慢,但噪声越小)。 此时按一次“K1”,则对于的闪烁次数(即滤波系数)减一;按一次“K2”,闪烁次数加一;选择你需要的滤波系数后,停止操作按钮,等待20秒之后,LED 长亮2秒,滤波系数被永久保存到变送器芯片内,然后切换到正常称重状态。 出厂默认的滤波系数为3。 标定零点: 按住“K2”键3秒以上,等到显示LED 从原来的间隔3秒闪烁亮一次变成长亮大约2秒,然后短暂熄灭一次的循环时松手,进入标定零点; 保持秤台和传感器的稳定,同时用万用表监测输出模拟量,并使用按键调节模拟量到所需的数值(按键功能表参考:调试按键功能表)。 然后停止按键操作,继续保持秤台和传感器的稳定,20秒后,显示LED 会长亮2秒,然后恢复常态的间隔3秒闪烁1次的状态,标定零点成功,并被永久保存到变送器芯片内。 标定负载: 先在传感器或秤台上放置用于标定的负载(如砝码),并保持传感器和秤台的稳定。 按住“K1”键3秒以上,等到显示LED 从原来的间隔3秒闪烁亮一次变成快速闪烁时(亮0.1秒,然后灭0.1秒的快速循环)松手,进入标定负载。 同时用万用表监测输出模拟量,并使用按键调节模拟量到与负载相对应的数值(按键功能表参考:调试按键功能表)。 然后停止按键操作,继续保持秤台和传感器的稳定,20秒后,显示LED 会长亮2秒,然后恢复常态的间隔3秒闪烁1次的状态,标定负载成功,并被永久保存到变送器芯片内。 ★ 调节速度加速:标定负载时,若感觉按住按键进行连加或连减的速度还是太慢,可以在进入连加或连减状态(观测此时万用表的读数变化)后,再按边上的另一个按键,即可使当前的连加或连减速度加速10倍,方便在当前读数与目标要求差距太大的时候快速调节到位,节约调节时间。 ★ 友情提醒:标定负载和标定零点并非需要同时连续进行,建议在标定零点之后,在标定负载之前,秤台或传感器不要移动,以免影响标定精度;为保证输出精度,标定负载尽量选择满量程或接近满量程。 调试按键功能表
ABB定位器说明书Word版
ABB智能定位器故障判断 1、气缸给信号不动:将运行操作模式设为 1.3(手动),通过操作增加和减少键,观察OUT1 和OUT2是否有输出。两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。 2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电 压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在 DCS接口或传输导线上。 3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确, 没问题需要确定11 、12端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。 4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为 1.3 (手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。 5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范 围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。 ABB TZID-C智能定位器安装及操作说明书 (仅供调试维修人员使用参考) ※气动连接 ·使用与定位器气源端口处标识的标准接口连接气源 ·连接定位器的输出与气动执行器的气缸 ※电气连接 ※调试步骤 1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力 为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力); 2. 接通4---20mA输入信号。(定位器的工作电源取自输入信号,由DCS二线制供电,端电 压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路); 3. 检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试 完 毕,只需作检查确认,该步并非必须): ·按住MODE键 ·同时点击↑或↓键,直到操作模式代码1.3显示出来
压力和差压变送器详细详解使用说明书样本
压力和差压变送器详细使用说明 ( 一) 差压变送器原理与使用 本节根据实际使用中的差压变送器主要介绍电容式差压变送器。 1. 差压变送器原理 压力和差压变送器作为过程控制系统的检测变换部分, 将液体、气体或蒸汽的差压(压力)、流量、液位等工艺参数转换成统一的标准信号(如DC4mA~20mA 电流), 作为显示仪表、运算器和调节器的输入信号, 以实现生产过程的连续检测和自动控制。 差动电容式压力变送器由测量部分和转换放大电路组成, 如图1.1所示。 图1.1 测量转换电路
图1.2 差动电容结构差动电容式压力变送器的测量部分常采用差动电容结构, 如图 1.2所示。中心可动极板与两侧固定极板构成两个平面型电容 H C和L C。可动极板与两侧固定极板形成两个感压腔室, 介质压力是经过两个腔室中的填充液作用到中心可动极板。一般采用硅油等理想液体作为填充液, 被测介质大多为气体或液体。隔离膜片的作用既传递压力, 又避免电容极板受损。 当正负压力(差压)由正负压导压口加到膜盒两边的隔离膜片上时, 经过腔室内硅油液体传递到中心测量膜片上, 中心感压膜片产生位移, 使可动极板和左右两个极板之间的间距不相对, 形成差动电容, 若不考虑边缘电场影响, 该差动电容可看作平板电容。差动电容的相对变化值与被测压力成正比, 与填充液的介电常数无关, 从原理上消除了介电常数的变化给测量带来的误差。 2. 变送器的使用 ( 1) 表压压力变送器的方向 低压侧压力口( 大气压参考端) 位于表压压力变送器的脖颈处,
在电子外壳的后面。此压力口的通道位于外壳和压力传感器之间, 在变送器上360°环绕。保持通道的畅通, 包括但不限于由于安装变送器时产生的喷漆, 灰尘和润滑脂, 以至于保证过程通畅。图1.3为低压侧压力口。 图1.3 低压侧压力口 ( 2) 电气接线 ①拆下标记”FIELD TERMINALS”电子外壳。 ②将正极导线接到”PWR/COMN”接线端子上, 负极导线接 到”-”接线端子 上。注意不得将带电信号线与测试端子( test) 相连, 因通电将损坏测试线路中的测试二极管。应使用屏蔽的双绞线以获得最佳的测量效果, 为了保证正确通讯, 应使用24AWG或更高的电缆线。 ③用导管塞将变送器壳体上未使用的导管接口密封。 ④重新拧上表盖。 ( 3) 电子室旋转 电子室能够旋转以便数字显示位于最好的观察位置。旋转时, 先松开壳体旋转固定螺钉。
西门子智能定位器调试说明-精选.
西门子智能定位器调试说明: SIPART PS2电气定位器用来控制气动直行程或角行程执行机构如下图: 角行程 直行程
一、智能定位器功能图: 说明:1、①机侧凝结水补充水箱出口调门为单作用定位器,反馈:61-ZI+;62-ZI-;②当失信号时阀门全开③操作时按“+”健阀门向关方向走,按“-”健阀门向全开方向走(与说明书上相反)。(单作用铭牌)
2、炉侧磨煤机入口冷热风调门为双作用定位器,(双作用铭牌)
3.炉侧磨煤机入口冷热风调门为双作用定位器接线原理图: 二、校验与调整 1、参数设置: (定位器上有三个按键:小手形、“+”健、“-健”) 自动模式(MAN手动)阀门实际开度指令开度 1.1 按住功能键(小手形)5秒后就可以进行参数设置 1.2 西门子智能定位器共有55组参数,可以根据现场实际情况进行设置。用“+”和“-” 健可在一组参数中进行选择,选择完了可以按一下功能键进入第二组参数的设置,若上一个参数有误,可以按功能键的同时按住“-”健,回到上一个参数进行设置。 1.3 组态:以下几个参数是经常用到的,具体请参考说明书上的组态表。 YFCT(参数组号①)执行器类型:直行程选WAY,角行程选TURN(本厂机侧的凝结水补充水箱出口调门和炉侧的磨煤机入口冷热风调门都为直行程) YAGL②额定反馈角度:一般情况下直行程33度,角行程90度,(本厂本厂机侧的凝结水补充水箱出口调门和炉侧的磨煤机入口冷热风调门都为直行程,但选的是90度,具体应该看反馈杆的长度,短杠杆33度的长度为:5/10/15/20mm,短杠杆90度的长度
为:25/30/35mm,长杠杆90度的长度为:40/50/60/70/90/110/130mm) INITA④初始化(自动) SDIR⑦给定方向:上升RISE,下降FAIL YDIR(38)操作变量显示:上升RISE,下降FAIL.同时改变SDIR和YDIR这两组的参数可以改变执行器的动作方向。 2、西门子智能定位器初始化步骤: 2.1 接通4-20mA输入信号,现在定位器处于手动模式“MAN”,在定位器显示窗口上方显示的为电位计的电压百分数,例如:“P12.3”,窗口的下方闪烁显示“HDINIT”即“未初始化”; 2.2 用定位器显示窗口下方的“+”和“-”两个按键使执行机构运动,看整个机构是否走满全程; 2.3 让执行器运动到行程的中间位置(直行程的反馈杆处于水平位置)就可以进行初始化了。 (注:当按住一个健的同时再按住另一个健可以加快执行机构动作。如想要执行机构向开的方向运动的更快需按住“+”健的同时再按住“-”健。) 2.4 参数设置完毕后,用功能键切换到第四个参数,即显示“4.INIT”,按住”+”健5秒定位器就可以自动初始化了。 2.5 初始化一共分为5步: RUN1 决定动作方向 RUN2 检查执行机构行程和零点 RUN3 确定执行机构上下动作时间,按住“+”健停止,按“-”健开始泄漏检查RUN4 确定最小的定为增量 RUN5 最佳的瞬时响应 2.6 当初始化完成时屏幕显示“FINISH”按一下功能健显示“4.INIT”。按功能键5秒后,当屏幕显示有变化时松手,定位器进入手动模式,再按一下功能键定位器处于自动模式。 2.7 此时初始化结束,定位器进入正常工作状态,日常使用时按一下功能键可在自动和手动间切换,手动时按“+”“-”使执行器动作。 3、初始化过程中易出现的故障及解决方法: (双击打开此图标) 4、三段保护原理: ①使用信号检测装置,可以调整动作电流值,当电流小于4mA(或任意一设定值,即 断信号)时通过动作电磁阀,释放锁定阀讯号压力闭锁执行器气路,从而实现断信号保位的功能; ②断电保位就是通过动作电磁阀,释放锁定阀讯号压力实现; ③断气保位是直接用闭锁阀实现。
ABB智能定位器TZID-C调试说明书(中文正式版)
ABB TZID-C智能定位器安装及操作说明书 ※气动连接 ·使用与定位器气源端口处标识的标准接口连接气源 ·连接定位器的输出与气动执行器的气缸 ※电气连接 根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32) ※ 1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为 7BAR,但实际供气压力必须参考执行器所容许的最大气源压力); 2.接通4---20mA输入信号。(定位器的工作电源取自输入信号,由DCS二线制供电,端电 压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3.检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须): ·按住MODE键 ·同时点击↑或↓键,直到操作模式代码1.3显示出来 ·松开MODE键。 ·使用↑或↓键操作,使执行器分别运行到两个终端位置,记录两终端角度。
·两个角度应符合下列推荐角度范围(最小角位移20度;无需严格对称) 直行程(小角度)应用在-28°---+28°之内。 角行程(大角度)应用在-57°---+57°之内。 全行程角度应不小于25° 4.切换至参数配置菜单 ·同时按下↑和↓键 ·点击ENTER键,然后松开该键, ·计数器从3计数到0, ·松开↑和↓键 程序自动进入P1.0配置菜单 5.使用↑和↓键选择定位器运行形式为直行程或角行程。 角行程运行形式:角度变换大于-28°—+28°(56°)小于-57°—+57°(114°)。 直行程运行形式:角度变换小于-28°—+28°(56°)。 注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。 6.启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定); ·按住MODE键 ·点击↑键一次或多次,直到显示出“P1.1” ·松开MODE键 ·按住ENTER键3秒直到计数器倒数到0 ·松开ENTER键,自动调整程序开始运行(显示正在进行的程序语句号)。 ·自动调整程序顺利结束后,显示器显示“COMPLETE”。
变送器说明书样本
第一章概述 重量变送器适用于有模拟输出接口要求的衡器, 也适用对控制精度、速度要求不高的定量输出功能的衡器。 1.1 特点 本仪表主要特点如下: ☆ 数字校准: 能够有两点非线性校准。 ☆ 丰富的接口功能:RS-232C —个、0/4~20mA模拟输出接口一个、定值输出点2 个。 第二章安装 2.1 安装要求:应符合第一章中1.2.2 工作环境的要求。 2.1.1 请不要将本仪表安装在如下条件环境中: 1) 阳光直射处 2) 靠近热源、水源处 3) 暴露在雨环境下 4) 温差变化较大 5) 粉尘严重或存在易燃、易爆、腐蚀性气体 2.1.2最好的工作条件为室温20C,湿度为50% RH 2.1.3 本仪表电源接地应确保良好( 小于4 欧姆) 且不得与其它用电设备共地。 2.1.4 请不要将传感器信号线与电力电缆一同铺设。
2.1.5 供电电源应稳定, 否则需加装电源净化设备。
2.2传感器的连接(见表1) 如果传感器与仪表间电缆很短(小于4米),能够使用4线制连接(图6)但1、2和6、7管脚必须短接。 避免传感器信号线靠近仪表电源线和通讯线,否则会引起附加的电噪声。 接线盒 激励电压 信号正S 屏蔽 激励电压 信号负S 图1 四线制连接
接线盒 激励电压 信号正S 屏蔽激励电压 信号负S 图2 六线制连接 表1 传感器连接表 管脚;1234567 定义:激励电压正:反馈电压正信号正屏敝信号负反馈电压负激励电压负符号 E + F + S + P S - F - E -
第三章基本操作 3.1 正常工作 1.仪表可根据传感器的输出信号的输出相应的电流值 2. 该仪表能够设定两个定量值, 且可根据设定的两个定量值输出定量点控制信号。当仪表输出值大于” HH 设定值时,贝HH定量点开关量输出<当仪表输出值小于” LL” 设定值时, 则” LL” 定量点开关量输出。 3.2 定值输出功能 在称重状态下,按〖设定〗键,仪表进入用户编程状态,将” CoP-ES设为1X, 仪表前面板上的”定值”标志指示, 贝仪表可根据” -HH-”、” -LL- ” 2 个定值点的设定数值大小输出定值点信号。如不需定值输出, 贝将” CoP-En” 设为0X。 X可设定为(0~2 ) 3 种工作方式。 0 时:小于等于”-LL- ” 设定值、大于等于”HH”设定值有定量点开关量输出。 1 时:大于等于”-LL- ” 设定值、大于等于”HH”设定值有定量点开关量输出。 2 时:小于等于”-LL- ” 设定值、小于等于”HH”设定值有定量点开关量输出
ABB定位器使用说明书
ABB定位器使用说明书 气路连接 ●使用与定位器气源端口处标识的标准接口连接气源 气源的要求: 仪表气体(无忧、无尘、无水、符合DIN/ISO8573-1污染及含油三级标准,最大颗粒直径<5um,且含量<5mg/m3,滴油<1mg/m3。露点温度低于工作温度10k ●连接定位器的输出与气动执行机行器的气缸 电气连接 根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)+11-12控制信号输入端子(DC4---20MA,负载电阻Max.410欧姆)+31 +41 +51 +81 +83 +41 +51-32 -42 -52 -82 -84 -42 -52位置反馈输出端子(DC4---20MA,DCS+24V供电)全关信号输出端子
全开信号输出端子 开关信号输入端子 报警信号输出端子 低位信号输出端子(干簧管接点输出,5—11VDC,<8MA)高位信号输出端子(干簧管接点输出,5—11VDC,<8MA调试步骤 1.接通气源前,现将气源管放空一段时间以排除路中可能存在的灰尘、杂质、水、油等。建议放空时间30分钟,可以用收或者白纸、白布进行气源质量的检查。检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为6BAR,但实际供气压力必须参考执行器所容许的最大气源压力) 2.接通4—20MA输入信号。(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。 3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须)。 .按住MODE键 .并同时点击↑或↓键,直到操作模式代码 1.3显示出来。 .松开MODE键。 .使用↑或↓,使执行器分别运行到两个终端位置,记录两终端角度 .两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)执行程应用范围在-28°----+28°之内 角行程应用范围在-25°-----+57°之内 全行程角度应不小于25° 4.切换参数配置菜单
意大利STI-FT智能定位器调试说明_中文2013版
FT系列智能定位器 调试说明 Manual2013-FT-C
标准型定位器 故障保位型定位器
1、标准型定位器接线图 模拟量输入和输出:4-20mA 指令信号及反馈信号需要回 路提供24VDC电源(二线 制)。 数字量输入:24VDC 数字量输出:需要提供 24VDC电源。
2、故障保位型定位器接线图 4-20mA指令信号接J3A端子。 失信号保位用电磁阀的电缆接J1A端子。 其余接线和标准型相同。 3、分体式传感器接线图 连接分体传感器的电缆必须使用屏蔽电缆。 调试用的笔记本电脑需要使用电池电源,不能使用交流电源。
4、使用远程控制软件 安装软件 插入光盘(或下载安装文件) 运行“setup.exe” 按照屏幕上的说明操作 安装数据线驱动程序 用数据线将定位器和电脑连接好之后,按照电脑提示安装驱动程序。 (TTL232R-3V3的驱动程序可以从网络下载或者向供货商索要) 4.1 远程控制软件的接口 HART界面接口:用4~20mA输入信号线(J3)连接你的HART界面。 TTL高速串行接口:使用专用的数据线连接到J7。 如果4~20mA信号发生器不适应HART协议,那么通讯会有问题。 TTL高速界面不是本质安全的。 只能在安全区域使用这种界面,或者在使用前采取所有必要的预防措施。 4.2 启动软件 通过点击电脑桌面上的图标或者从 Windows的开始菜单都可以运行该软件。这时 会显示“Select Communication”(选择通讯类 型)窗口。 1)选择正确的通讯端口。 2)选择通讯类型(TTLRS232或HART)。 3)按“OK” 按钮。 z可用的通讯端口会显示在组合框中。可查看电脑的设备管理器中的端口来确定通讯端口。 z如果你想减少更新频率和通讯线上通信量,就取消选择“Auto Download and Refresh Vars”(自动下载和变量更新)