奈奎斯特判据
5.4 频域稳定判据
5.4.1 奈奎斯特稳定判据
闭环控制系统稳定的充要条件是:闭环特征方程的根均具有负的实部,或者说,全部闭环极点都位于左半s 平面。第3章中介绍的劳斯稳定判据,是利用闭环特征方程的系数来判断闭环系统的稳定性。这里要介绍的频域稳定判据则是利用系统的开环频率特性)(ωj G 来判断闭环系统的稳定性。
频域稳定判据是奈奎斯特于1932年提出的,它是频率分析法的重要内容。利用奈奎斯特稳定判据,不但可以判断系统是否稳定(绝对稳定性),也可以确定系统的稳定程度(相对稳定性),还可以用于分析系统的动态性能以及指出改善系统性能指标的途径。因此,奈奎斯特稳定判据是一种重要而实用的稳定性判据,工程上应用十分广泛。
1.辅助函数
对于图5-33所示的控制系统结构图,其开环传递函
数为
)()()()()(0s N s M s H s G s G =
= (5-59)
相应的闭环传递函数为 )()()()()
(1)()(1)()(000s M s N s G s N s N s G s G s G s +=+=+=Φ (5-60) 式中,为开环传递函数的分子多项式,阶;为开环传递函数的分母多项式,阶,。由式(5-59)、式(5-60)可见,)(s M m )(s N n m n ≥)()(s M s N +和分别为闭环和开环特征多项式。现以两者之比构成辅助函数
)(s N ()()()1()()
M s N s F s G s N s +==+ (5-61) 实际系统传递函数分母阶数n 总是大于或等于分子阶数,因此辅助函数的分子、分母同阶,即其零点数与极点数相等。设)(s G m 1z ?,2z ?,…,n z ?和1p ?,,…,分别为其零、极点,则辅助函数可表示为
2p ?n p ?)(F s )
())(()())(()(2121n n p s p s p s z s z s z s s F ++++++=L L
(5-62)
综上所述可知,辅助函数具有以下特点:
)(s F (1)辅助函数是闭环特征多项式与开环特征多项式之比,其零点和极点分别为闭环极点和开环极点。
)(s F (2)的零点和极点的个数相同,均为个。
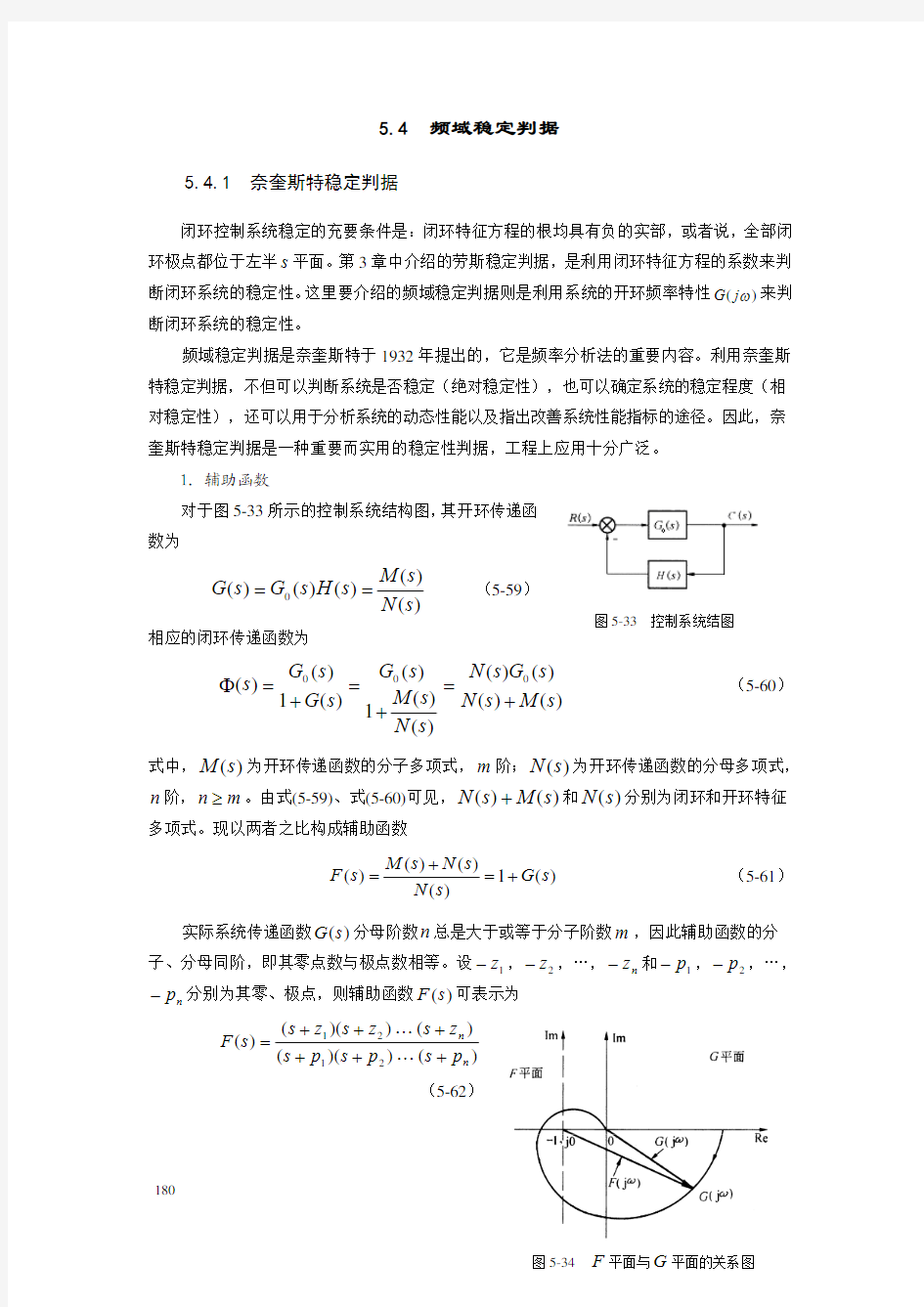
)(s F n (3)与开环传递函数之间只差常量1。)(s F )(s G )(1)(s G s F +=的几何意义为:F 平面上的坐标原点就是G 平面上的(0,1j ?)点,如图5-34所示。
2.幅角定理
辅助函数是复变量的单值有理复变函数。由复变函数理论可知,如果函数在平面上指定域内是非奇异的,那么对于此区域内的任一点d ,都可通过的映射关系在平面上找到一个相应的点 (称为d 的像);对于平面上的任意一条不通过任何奇异点的封闭曲线)(s F s )(s F s )(s F )(s F 'd 'd s )(s F Γ,也可通过映射关系在平面(以下称)(s F Γ平面)找到一条与它相对应的封闭曲线 (称为的像),如图5-35所示。
'Γ'Γ
Γ
图5-35 平面与平面的映射关系
s F 设平面上不通过任何奇异点的某条封闭曲线s )(s F Γ,它包围了在平面上的)(s F s Z 个零点和P 个极点。当以顺时针方向沿封闭曲线s Γ移动一周时,则在平面上相对应于封闭曲线的像将以顺时针的方向围绕原点旋转F Γ'ΓR 圈。R 与Z 、的关系为
P P Z R ?= (5-63)
3.奈奎斯特稳定判据
为了确定辅助函数位于右半平面内的所有
零、极点数,现将封闭曲线扩展为整个右半平面。为
此,设计)(s F s Γs Γ曲线由以下3段所组成:
ⅰ– 正虚轴ωj s =:频率ω由0变到∞;
ⅱ–半径为无限大的右半圆:
θj e R s =∞→R ,θ由2π变化到2π?;
ⅲ– 负虚轴ωj s =:频率ω由∞?变化到0。
这样,3段组成的封闭曲线(称为奈奎斯特路径,
简称奈氏路径)就包含了整个右半平面,如图5-36
所示。
Γs 图5-36 奈奎斯特路径
在平面上绘制与F Γ相对应的像'Γ:当沿虚轴变化时,由式(5-61)则有
s )(1)(ωωj G j F += (5-64)
式中,)(ωj G 为系统的开环频率特性。因而将由下面几段组成:
'Γ ⅰ– 和正虚轴对应的是辅助函数的频率特性)(ωj F ,相当于把)(ωj G 右移一个单位;
ⅱ–和半径为无穷大的右半圆相对应的辅助函数。由于开环传递函数的分母阶数高于分子阶数,当时,,故有1)(→s F ∞→s 0)(→s G 1)(1)(→+=s G s F ;
ⅲ–和负虚轴相对应的是辅助函数频率特性)(ωj F 对称于实轴的镜像。
图5-37绘出了系统开环频率特性曲线)(ωj G 。将曲线右移一个单位,并取镜像,则成为平面上的封闭曲线F 'Γ如图5-38所示。图中用虚线表示镜像。
对于包含了整个右半平面的奈氏路径来说,式(5-63)中的s Z 和P 分别为闭环传递函数和开环传递函数在右半平面上的极点数,而s R 则是平面上F 'Γ曲线顺时针包围原点的圈数,也就是平面上系统开环幅相特性曲线及其镜像顺时针包围(G 0,1j ?)点的圈数。在实际系统分析过程中,我们一般只绘制开环幅相特性曲线不绘制其镜像曲线,考虑到角度定义的方向性,有
N R 2?= (5-65) 其中,是开环幅相特性曲线N )(ωj G (不包括其镜像)包围G 平面(0,1j ?)点的圈数(逆时针为正,顺时针为负)。将式(5-65)代入式(5-63),可得奈奎斯特判据(简称奈氏判据):
N P Z 2?= (5-66)
式中,Z 是右半平面中闭环极点的个数,是右半平面中开环极点的个数,是G 平面上s P s N )(ωj G 包围(0,1j ?)点的圈数(逆时针为正)。显然,只有当时,闭环系统才是稳定的。
2=?=
N P Z .
图5-37 )(ωj G 特性曲线 图5-38 平面上的封闭曲线
F 例5-9 设系统开环传递函数为
)
52)(2(52)(2+++=s s s s G
试用奈氏判据判定闭环系统的稳定性。
图5-39
幅相特性曲线及其镜像
解 绘出系统的开环幅相特性曲线如图5-39所
示。当0=ω时,曲线起点在实轴上2.5)0(=j G 。
当∞→ω时,终点在原点。当5.2=ω时曲线和负
虚轴相交,交点为。当06.5j ?3=ω时,曲线和负
实轴相交,交点为0.2?。见图5-39中实线部分。
在右半平面上,系统的开环极点数为0。
开环频率特性s )(ωj G 随着ω从变化到0∞+时,
顺时针方向围绕点()一圈,即0,1j ?1?=N 。
用式(5-66)可求得闭环系统在右半平面的极点数为 s 2)1(202=?×?=?=N P Z
所以闭环系统不稳定。
利用奈氏判据还可以讨论开环增益K 对闭环系统稳定性的影响。当K 值变化时,幅频特性成比例变化,而相频特性不受影响。因此,就图5-39而论,当频率3=ω时,曲线与
负实轴正好相交在(0,2j ?)
点,若K 缩小一半,取6.2=K 时,曲线恰好通过点(),这是临界稳定状态;当时,幅相特性曲线0,1j ?6.2 0,1j ?例5-10 系统结构图如图5-40所示, 试判断系统的稳定性并讨论K 值对系统稳定性的 影响。 图5-40 例5-10系统结构图 图5-41 1>K 和1 特性曲线 解 系统是一个非最小相角系统,开环不稳定。开环传递函数在右半平面上有一个极点, s 1=P 。幅相特性曲线如图5-41所示。当0=ω时,曲线从负实轴点()出发;当0,j K ?∞→ω时,曲线以趋于坐标原点;幅相特性包围点(o 90?0,1j ?)的圈数与N K 值有关。图5-41绘出了1>K 和1 当1>K 时,曲线逆时针包围了点(0,1j ?)的21圈,即21=N ,此时 0)21(212=×?=?=N P Z ,故闭环系统稳定;当1 即,此时0,1j ?0=N 10212=×?=?=N P Z , 有一个闭环极点在右半平面,故系统不稳定。 s 5.4.2 奈奎斯特稳定判据的应用 如果开环传递函数在虚轴上有极点,则不能直接应用图5-36所示的奈氏路径,因为幅角定理要求奈氏轨线不能经过的奇点,为了在这种情况下应用奈氏判据,可以对奈氏路径略作修改。使其沿着半径为无穷小()的右半圆绕过虚轴上的极点。例如,当开环传递函数中有纯积分环节时,s 平面原点有极点,相应的奈氏路径可以修改如图5-42所示。图中的小半圆绕过了位于坐标原点的极点,使奈 氏路径避开了极点,又包围了整个右半平面,前述的奈氏判 据结论仍然适用,只是在画幅相特性曲线时,s 取值需要先从 绕半径无限小的圆弧逆时针转到,然后再沿虚轴 到)(s G )(s F 0→r s 0j o 90+0j ∞j 。这样需要补充小圆弧所对应的+ →=00j j s ) (ωj G 特性曲线。 图5-42 开环含有积分 环节时的奈氏路径 设系统开环传递函数为 11(1()(1m i i n v v j j K s G s s T s τ=?=) ) +=+∏∏ 式中,v 为系统型别。当沿着无穷小半圆逆时针方向移动时,有0lim jv r s re θ→=,映射到G 平 面的曲线可以按下式求得 001lim 01lim (1)()lim (1) j r j r m i jv jv i n v v s re r v j j s re K s K G s e e r s T s θθ θθτ→→?=?=→==+= =+∏∏?=∞ (5-67) 由上述分析可见,当沿小半圆从s 0=ω变化到时,+=0ωθ角沿逆时针方向从0变化到2π,这时G 平面上的映射曲线将从)0(j G ∠位置沿半径无穷大的圆弧按顺时针方向转过2v π?角度。在确定)(ωj G 绕点)01(j ,?圈数的值时,要考虑大圆弧的影响。 N 例5-11 已知开环传递函数为 ) 1()(+=Ts s K s G 其中,T ,绘制奈氏图并判别系统的稳定性。 0>K 0> 解 该系统在坐标原点处有一个极点,为Ⅰ型系统。取奈氏路径如图5-42所示。当沿小半圆移动从)(s G s 0=ω变化到时,在平面上映射曲线为半径的+=0ωG ∞→R 2π圆弧。幅相特性曲线(包括大圆弧)如图5-43所示。此系统开环传递函数在右半平面无极点,;的奈氏曲线又不包围点(s 0=P )(s G 0,1j ?),0=N ;因此02=?=N P Z ,闭环系统是稳定的。 图5-43 例5-11的奈氏图 图5-44 例5-12的奈氏图 例5-12 已知系统开环传递函数为 ) 1()3()()(?+= s s s K s H s G 试绘制奈氏图,并分析闭环系统的稳定性。 解 由于在右半平面有一极点,故)()(s H s G s 1=P 。当0K 1<<时,其奈氏图如图 5-44(a)所示,图中可见,当ω从到0∞+变化时, 奈氏曲线顺时针包围点()0,1j ?21?圈,即21?=N ,2)21(212=+=?=N P Z ,因此闭环系统不稳定。当1K >时,其奈氏图如图5-44(b)所示,当ω从到0∞+变化时,奈氏曲线逆时针包围点()0,1j ?21+圈,21+=N ,0)21(212=?=?=N P Z ,此时闭环系统是稳定的。 5.4.3 对数稳定判据 实际上,系统的频域分析设计通常是在Bode 图上进行的。将奈奎斯特稳定判据引申到Bode 图上,以Bode 图的形式表现出来,就成为对数稳定判据。在Bode 图上运用奈奎斯特判据的关键在于如何确定)(ωj G 包围点(0,1j ?)的圈数。 N 系统开环频率特性的奈氏图与Bode 图存在一定的对应关系,如图5-45所示。 (1) 奈氏图上1)(=ωj G 的单位圆与Bode 图上的dB 0线相对应。单位圆外部对应于0)(>ωL ,单位圆内部对应于0)(<ωL 。 (2) 奈氏图上的负实轴对应于Bode 图上o 180线。 )(?=ω? 在奈氏图中,如果开环幅相特性曲线在点(0,1j ?)以左穿过负实轴,则称为“穿越”。 若沿ω增加方向, 曲线按相位增加方向(自上而下)穿过点(0,1j ?)以左的负实轴,则称为正穿越;反之曲线按相位减小方向(自下而上)穿过点(0,1j ?)以左的负实轴,则称为负穿越, 如图5-45()所示。如果沿a ω增加方向, 幅相特性曲线自点(0,1j ?)以左的负实轴上某点开始向下(上)离开,或从负实轴上(下)方趋近到点(0,1j ?)以左的负实轴上某点,则称为半次正(负)穿越。 图5-45 奈氏图与Bode 图的对应关系 在Bode 图上,对应在0)(>ωL 的频段范围内沿ω增加方向,对数相频特性曲线按相位增加方向(自下而上)穿过线称为正穿越;反之,曲线按相位减小方向(自上而下)穿过 线为负穿越。 同理,在o 180?o 180?0)(>ωL 的频段范围内,对数相频曲线沿ω增加方向自线开始向上(下)离开,或从下(上)方趋近到线,则称为半次正(负)穿越,如图5.45(b )所示。 o 180?o 180?在奈氏图上,正穿越一次,对应于幅相特性曲线逆时针包围点(0,1j ?)一圈,而负穿越一次,对应于顺时针包围点()一圈,因此幅相特性曲线包围点()的次数等于正、负穿越次数之差,即 0,1j ?0,1j ?N N N +?=? (5-68) 式中是正穿越次数,是负穿越次数。在Bode 图上可以应用此方法方便地确定。 +N ?N N 例5-13 单位反馈系统的开环传递函数为 *21()2()(1)(2) K s G s s s s +=++ 当时,判断闭环系统的稳定性。 *0.8K =解 首先计算)(ωj G 曲线与实轴交点坐标。 2222245110.81()0.8()222()(1)(2)45j j G j j j ωωωωωωωωωωω???++?+????==?++??++?? 令0)(Im =ωj G ,解出21=ω。计算相应实部的值[]5333.0)(Re ?=ωj G 。由此可画出开环幅相特性和开环对数频率特性分别如图5-46()和(c )所示。系统是Ⅱ型的,相应在b )(ωj G ,)(ω?上补上大圆弧,如图5-46(b)、(c)中虚线所示。应用对数稳定判据,在o 1800)(>ωL 的频段范围(0~c ω)内,)(ω?j 在处有负、正穿越各+=0ω21次,所以 02020 2121=×?=?==?=?=?+N P Z N N N 可知闭环系统是稳定的。 图5-46 开环零、极点分布及幅相特性和对数频率特性图 5.4 频域稳定判据 5.4.1 奈奎斯特稳定判据 闭环控制系统稳定的充要条件是:闭环特征方程的根均具有负的实部,或者说,全部闭环极点都位于左半s 平面。第3章中介绍的劳斯稳定判据,是利用闭环特征方程的系数来判断闭环系统的稳定性。这里要介绍的频域稳定判据则是利用系统的开环频率特性)(ωj G 来判断闭环系统的稳定性。 频域稳定判据是奈奎斯特于1932年提出的,它是频率分析法的重要内容。利用奈奎斯特稳定判据,不但可以判断系统是否稳定(绝对稳定性),也可以确定系统的稳定程度(相对稳定性),还可以用于分析系统的动态性能以及指出改善系统性能指标的途径。因此,奈奎斯特稳定判据是一种重要而实用的稳定性判据,工程上应用十分广泛。 1.辅助函数 对于图5-33所示的控制系统结构图,其开环传递函 数为 )()()()()(0s N s M s H s G s G = = (5-59) 相应的闭环传递函数为 )()()()() (1)()(1)()(000s M s N s G s N s N s G s G s G s +=+=+=Φ (5-60) 式中,为开环传递函数的分子多项式,阶;为开环传递函数的分母多项式,阶,。由式(5-59)、式(5-60)可见,)(s M m )(s N n m n ≥)()(s M s N +和分别为闭环和开环特征多项式。现以两者之比构成辅助函数 )(s N ()()()1()() M s N s F s G s N s +==+ (5-61) 实际系统传递函数分母阶数n 总是大于或等于分子阶数,因此辅助函数的分子、分母同阶,即其零点数与极点数相等。设)(s G m 1z ?,2z ?,…,n z ?和1p ?,,…,分别为其零、极点,则辅助函数可表示为 2p ?n p ?)(F s ) ())(()())(()(2121n n p s p s p s z s z s z s s F ++++++=L L (5-62)奈奎斯特判据