基于小信号模型的微网控制参数选择与稳定性分析_张明锐_黎娜_杜志超_徐而峰_陈洁
第32卷第25期中国电机工程学报V ol.32 No.25 Sep. 5, 2012
2012年9月5日Proceedings of the CSEE ?2012 Chin.Soc.for Elec.Eng. 9 文章编号:0258-8013 (2012) 25-0009-11 中图分类号:TM 71 文献标志码:A 学科分类号:470?40
基于小信号模型的微网控制参数选择与稳定性分析
张明锐,黎娜,杜志超,徐而峰,陈洁
(同济大学电子与信息工程学院,上海市嘉定区 201804)
Control Parameter Selection and Stability Analysis of Microgrid Based on Small-signal Model ZHANG Mingrui, LI Na, DU Zhichao, XU Erfeng, CHEN Jie
(College of Electronic and Information Engineering, Tongji University, Jiading District, Shanghai 201804, China)
ABSTRACT: Small-signal stability is one of the key issues in microgrid operation, especially for islanding modes, since the controller is complex and the microgrid can’t obtain voltage and frequency reference from the main grid. Therefore, taking future renewable electric energy delivery and management (FREEDM) network as research object, this paper derived the full state-space equations of solid state transformer (SST), distribution network and loads, and established a complete small-signal model of microgrid to analyze the system stability during islanded operation. The key parameters affecting system stability were determined according to eigenvalues and sensitivity analysis. A loop type microgrid with multi-SST was designed and simulation tests were performed to verify the correctness of the selected controller parameters. The simulation results show that the system has strong adaptability to load mutation and random fluctuation and has good performance on restraining loop current. The small-signal model can be applied to microgrid stability analysis and optimization of controller parameters.
KEY WORDS: microgrid; small-signal model; solid state transformer (SST); droop control; islanded operation
摘要:小信号稳定性是微网运行的关键问题之一,特别是孤岛运行时,控制器结构较为复杂,且缺少大电网的电压频率支撑。为此,以未来可再生电能传输和管理(future renewable electric energy delivery and management,FREEDM)网络为对象,推导固态变压器(solid state transformer,SST)、网络线路及负荷模型的状态空间方程,建立完整的微网小信号模型,分析孤岛运行时的稳定性,并根据其状态矩阵特征值及灵敏度,确定影响系统稳定的关键参数,设计配置多SST 的环形微网,仿真验证选取的控制器参数的正确性。结果表明,系统对负荷突变和随机波动都具有很强的适应性,且
基金项目:教育部留学回国人员科研启动基金资助项目(080024- 10012);中央高校基本科研业务费专项资金资助项目(0800219169)。
Project sponsored by SRF for ROCS, SEM (08002410012); The Fundamental Research Funds for the Central Universities (0800219169). 具有良好的环流抑制效果。所建小信号模型可用于微网稳定性分析及控制器参数的优化设计。
关键词:微网;小信号模型;固态变压器;下垂控制;孤岛运行
0 引言
为解决小容量分布式电源并网发电并提高其利用效率,出现了多种微网模式。其中,未来可再生电能传输和管理(future renewable electric energy delivery and management,FREEDM)网络是基于固态变压器(solid state transformer,SST)的新型高压微网,它使用了大量的电力电子设备。与传统微网不同,FREEDM采用环形网络结构,环网电压为10kV,各分布式电源通过固态变压器升压并网,实现所有供用电设备的即插即用[1],具有优越的性能与前瞻性。
微网孤岛运行时,由于不能从大电网获得电压和频率支撑,其控制十分复杂,目前多使用下垂控制来稳定其电压和频率[2-5]。分布式电源通过电力电子装置接入微网[6-8],电力电子装置在提高系统运行和控制灵活性的同时,存在系统惯量较小、受到扰动时易发生振荡失稳的缺陷[9],特别是孤岛模式下,电压频率的稳定控制难度更高。文献[10-12]基于理想逆变器建立小信号模型分析微网孤岛稳定性,然而对于大容量逆变器,开关频率降低会限制内部控制器的带宽,从而影响重要动态性能的分析精度。
本文以FREEDM环网孤岛运行时的稳定性分析为目标,分别建立固态变压器、滤波装置、网络线路和负荷的小信号状态空间模型。通过对系统状态矩阵的特征值及灵敏度分析,研究控制器状态变量与系统稳定性能的相互影响,建立了功率下垂控制系数的选择方法。在微网孤岛运行时,对负荷突
网络出版时间:2012-09-27 18:13
网络出版地址:https://www.360docs.net/doc/3c5298575.html,/kcms/detail/11.2107.TM.20120927.1813.201225.0_002.html
10 中 国 电 机 工 程 学 报
第32卷
变和随机波动2种扰动进行了稳定性仿真验证。
1 基于SST 的微型电网FREEDM
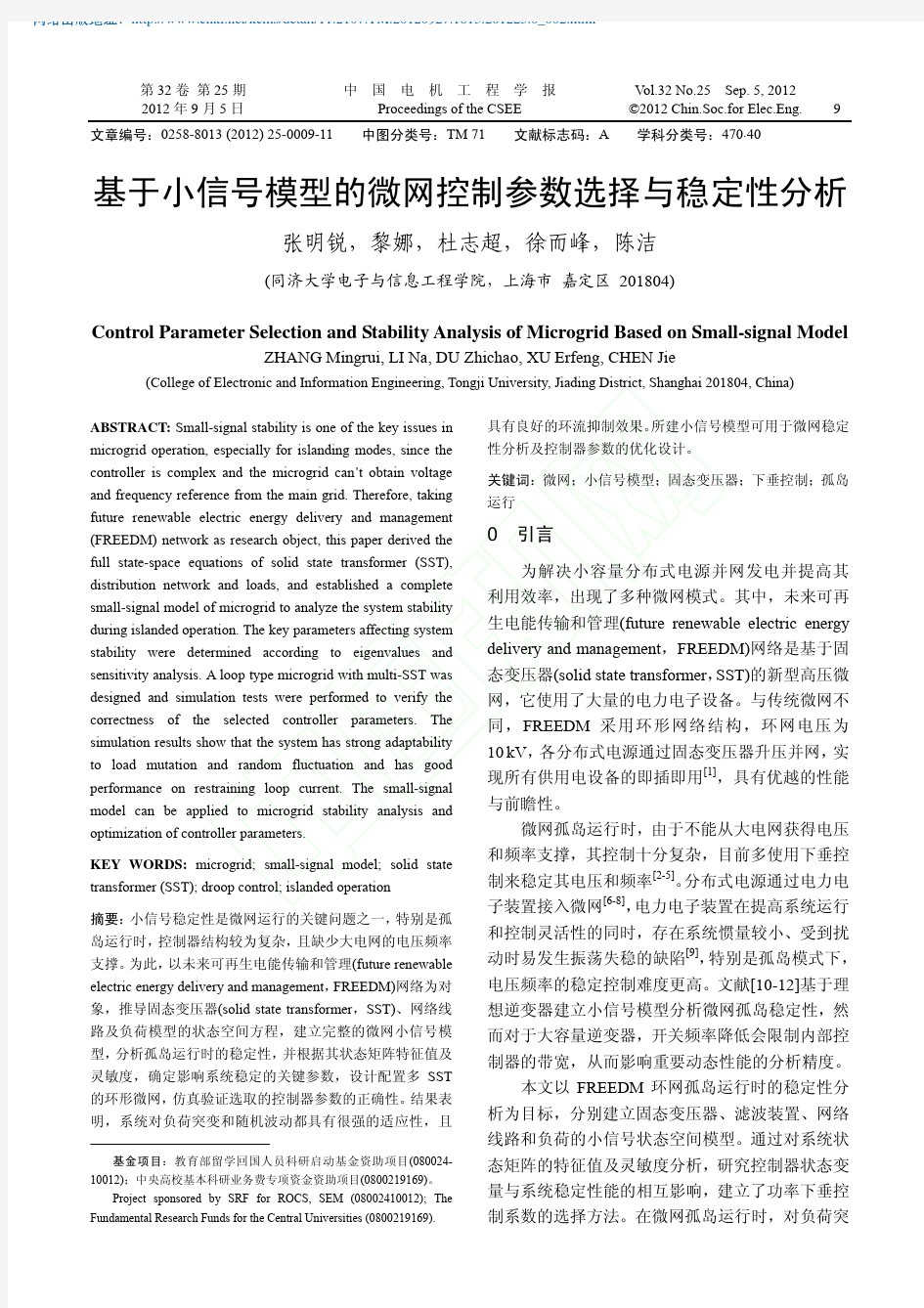
FREEDM 是一个特殊的环形高压微网,其构建目标是适应可再生分布式能源的发电并网,满足用户双向供、用电要求,并提供安全可靠的输、变、配电服务。FREEDM 是基于高带宽数字通信、分布式控制和电力电子技术[13]的电力网络。如图1所示,SST 是FREEDM 的关键设备,各种分布式电源、储能装置和负荷通过SST 的低压交、直流母线接入系统,实现供用电设备的即插即用。
图2 SST 基本结构示意图 Fig. 2 Typical structure of SST
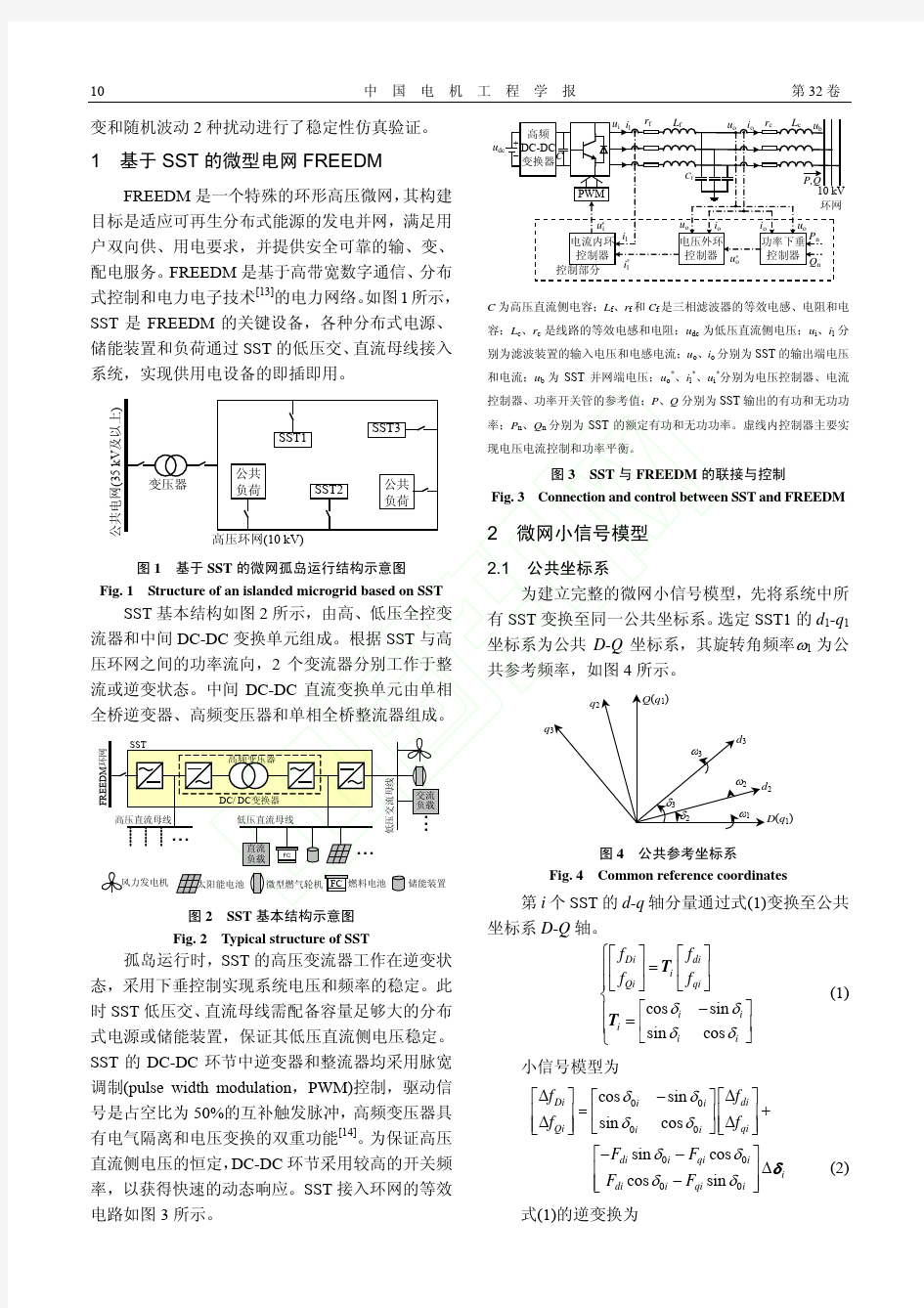
孤岛运行时,SST 的高压变流器工作在逆变状态,采用下垂控制实现系统电压和频率的稳定。此时SST 低压交、直流母线需配备容量足够大的分布式电源或储能装置,保证其低压直流侧电压稳定。SST 的DC-DC 环节中逆变器和整流器均采用脉宽调制(pulse width modulation ,PWM)控制,驱动信号是占空比为50%的互补触发脉冲,高频变压器具有电气隔离和电压变换的双重功能[14]。为保证高压直流侧电压的恒定,DC-DC 环节采用较高的开关频率,以获得快速的动态响应。SST 接入环网的等效电路如图3所示。
u
C 为高压直流侧电容;L f 、r f 和C f 是三相滤波器的等效电感、电阻和电容;L c 、r c 是线路的等效电感和电阻;u dc 为低压直流侧电压;u i 、i l 分别为滤波装置的输入电压和电感电流;u o 、i o 分别为SST 的输出端电压和电流;u 为SST 并网端电压;u *、i *、u *分别为电压控制器、电流
的d 1-q 1ω1为公(q 1)
坐标系D -Q 轴。
cos sin sin cos Di di i Qi qi i i i i i f f f f δδδδ?????=??????????
?
????=??????
T T (1) 小信号模型为 00000000cos sin sin cos sin cos cos sin Di di i
i Qi qi i
i di i qi i i di i qi i f f f f F F F F δδδδδδδδΔΔ?????
??=+??????ΔΔ??????????
????
Δ??????
?δ (2)
式(1)的逆变换为
第25期 张明锐等:基于小信号模型的微网控制参数选择与稳定性分析 11
11cos sin sin cos di Di i qi Qi i i i i i f f f f δδδδ???????=??????????
?
???=??
?????
T T (3) 小信号模型为
00000000cos sin sin cos sin cos cos sin di Di i i qi Qi i i di i qi i i di
i qi i f f f f F F F F δδδδδδδδΔΔ????
??=+??????ΔΔ??
??????+??Δ??????δ (4) 式中:f 表示SST 中电压或电流变量,而F 为其平衡工作点的值;δi 、δ0i 分别为第i 个SST 的d -q 坐标系与公共坐标系的夹角及其稳态工作点初值。下文中三相电压、电流均变换至d -q 坐标系,分别用下标d 、q 表示d 、q 分量。下标i 表示第i 个SST 的参量。各变量采用大写表示其稳态工作点初值。 2.2 基于下垂控制的SST 小信号模型
2.2.1 功率下垂控制器
在高压微网中,可将线路阻抗视为感性[15],即
L c >>r c ,图3中SST 输出功率P 、Q 可表示为
o b c
sin U U P L δ
ω=
(5)
2o o b c
cos U U U Q L δω?= (6)
式中:U o 、U b 分别为SST 输出电压与网络端电压幅值;δ为两电压的相角差。一般δ值很小,且SST 无法直接控制网络端电压,因此P 主要取决于输出电压相角,而Q 主要取决于输出电压幅值。通过控制输出电压的频率,即可动态控制2个端电压的相位差,从而控制SST 输出的有功功率P ,与此相对应,控制输出电压幅值,即可控制SST 输出的无功功率Q 。由此设计SST 下垂控制如下:
n n ()P k P P ωω=?? (7)
n n ()Q U U k Q Q =?? (8)
式中:ω、U 分别为SST 参考电压的角频率和幅值;
k P 、k Q 分别为有功功率和无功功率的下垂系数。
第i 个SST 的瞬时输出功率可以根据其输出电压、电流计算:
o o o o o o o o 3()23()2
i qi qi
di di i qi di di qi p u i u i q u i u i ?
=+???
?=??? (9) 小信号模型为
o o o o o o o o o o o o o o o o 3()23()2
i di di qi qi di di qi qi
i di qi qi di qi di di qi p I u I u U i U i q I u I u U i U i ?
Δ=Δ+Δ+Δ+Δ???
?Δ=Δ?Δ+Δ?Δ?? (10) 瞬时功率通过低通滤波器得到平均功率:
c c
c c i i i
i P p s Q q s ωωωω?
=?+??
?=?+?
(11) 式中ωc 为低通滤波器截止频率。其小信号模型为
c c c c i i i
i
i i P P p Q Q q ωωωω?Δ=?Δ+Δ??Δ=?Δ+Δ??
(12) 平均功率经下垂控制得到SST 的参考电压。定位参考电压幅值位于d 轴,则q 轴分量为0,根据式(7)、(8)得出参考电压的频率与d 、q 分量如下:
n n ()i i Pi i i k P P ωω=?? (13)
o n n o ()
di i Qi i i qi u U k Q Q u ??
?=????=?? (14) 小信号模型为
i Pi i k P ωΔ=?Δ (15) o
o 0
di Qi i qi u k Q u ??
?Δ=?Δ?
?Δ=?? (16) 如图4示,第i 个SST 的d -q 坐标系与公共坐
标系的夹角为
1i i δωω=?∫ (17)
将其线性化,并代入式(15)可得:
11i i Pi i k P δωωωΔ=Δ?Δ=?Δ?Δ (18)
由式(10)、(12)、(15)、(16)、(18)可得功率下垂控制器的小信号状态空间模型:
P P tp P 1i i i i i i i i i i P P Q Q ωδδ??ΔΔ??
????
Δ=Δ+Δ+Δ????????ΔΔ????A B x B ω (19) 输出方程为
P *o P Pv *o i i i i di i i i i qi i i u P P u Q Q ωωδδ??ΔΔΔ????
????????Δ=Δ=Δ????????????????ΔΔΔ??????
C C C (20) 式中:T tp l l o o o o []i di qi di qi di qi i i u u i i Δ=ΔΔΔΔΔΔx ;
P c
c 000000Pi
i k ωω???
??=????????
A ;
12 中 国 电 机 工 程 学 报 第32卷
P c o c o c o c o c o c o c o c o 0000003002
00i di qi di qi qi di qi di I I U U I I U U ωωωωωωωω????=????????
B ;
P ω100i ?????=??????B ;P ωP Pv 0000000Pi
i i Qi i k k ???????==???????????
C C C 。 2.2.2 电压电流双环控制器
如图5所示,电压外环采用PI 调节,并引入输出电流i o 前馈,抑制负荷波动对输出电压的影响,提高系统的动态响应性能。定义状态变量:
由式(22)、(24)可得第i 个SST 的电压外环小信号状态空间模型:
o V VA VB tp o di di di
i i i i qi qi qi u x u ????????ΔΔ????Δ=++Δ??????ΔΔΔ???????
?A B B (25) 输出方程为
*l o V VA VB tp *l o di di di i i i i qi qi qi i u i u ???
?????Δ??ΔΔ=++Δ??????ΔΔΔ??????????
C D D x (26) 式中:V 0i =A ;VA 1001i ??=????
B ;VB i =B 001000000100???
??
???;iv V iv 00i K K ??=???
?C ;VA i =D pv pv 00K K ??????;pv n f VB n f pv 00100001i K C C K ωω????
=?????D 。 如图5右部所示,电流内环采用电感电流反馈,
PI 调节方式。定义状态变量:
l l l l d d d d di
di di qi qi qi
i i t
i i
t
γγ???=????
?=??? (27) 其小信号模型为
l l di di di
i i γ??Δ=Δ?Δ? (28) ic ic di
qi K K γγ+ (29) ic ic )di
qi K K γγ+Δ+Δ (30) 电流内环的小信CB tp i i +ΔB x (31) CB tp i i +ΔD x (32) 01?
??
;CB i =B ic 0K ?
??
;CA i =D pc pc 00K K ??????;pc n f CB n f pc 00000000i K L L K ωω????
=?????
D 。
2.2.3 滤波器和线路
在较高的开关频率(4~10 kHz)下,可忽略开关部分的动态影响[16],认为开关管能按指令生成所需 电压,即u i =*i u ,因此,滤波电感电流i l 的d 、q 分 量为
l i o l f l i o l f f f l l d /d 11d /d 0 0di di di di qi qi qi qi di i qi i i t u u i r i t u u i L L L i i ωω????????
=???????????????????
???
?????????? (33) 线性化后得其小信号模型:
第25期 张明锐等:基于小信号模型的微网控制参数选择与稳定性分析 13
i o l l f i o l l f f f l 0l l 0l 110 0di di di di qi qi qi qi di i qi i
qi i di u u i i
r u u i i L L L i I i I ωωΔΔΔ??Δ??????=???????????ΔΔΔΔ????????
Δ???????+Δ??????Δ?????
?? ω (34) 式中ω0为系统在平衡点的稳态角频率。
滤波电容电压u o 的d 、q 分量如下:
o l o o l o o o f f d 011
d d 0d di di di di i qi qi qi qi i u i i u t i i u u C C t ωω??
?????????
????=????????????????????
????
(35) 其小信号模型为
o l o o l o f
f o 0o o 0o 110 0di di di qi qi qi di i qi i qi i di u
i i u i i C C u U u U ωωΔΔΔ??????
=??
??????ΔΔΔ????
??Δ???????+Δ??????Δ?????
?? ω (36) 如图3所示,线路上的输出电流i o 的d 、q 分量如下:其中u b 为SST 的并网端电压。
o o b o c c o c b c o o o o d d 11d d 0 0di di di di qi qi qi qi di i qi i i u u i t r L u L u L i i t i i ωω??
????????
??=???
????????????????????????
???
????
???????? (37) 其小信号模型为
o b o o c c o c b c o o o 0o o 0o 110 0di di di di qi qi qi qi di i qi i
qi i di u u i i
r L u L u L i i i I i I ωωΔΔΔ??Δ??????=???????????ΔΔΔΔ????????????????
Δ???????
+Δ??????Δ????????? ω (38) 由式(34)、(36)、(38)可得SST 输出部分的小信号状态空间模型:
i b tp O tp OA OB i b OC di di i i i i i qi qi i i u u u u ΔΔ????
Δ=Δ+++????ΔΔ????
Δx
A x
B B B ω (39)
式中:T tp l l o o o o []i di qi di qi di qi i i u u i i Δ=ΔΔΔΔΔΔx
; f f 0f 0f f f
f 0f O f 0f c c c 0c 0c c /1/0
00/01/001/001/001/001/001/0/0001//i i i i i i i r L L r L L C C C C L r L L r L ωωωωωω??????
??????????=???????????
??????
A ; f f OA 101000000000i L L ??
????????????=????????????
??B ;OB c c 000000001010i L L ??????????????=????????????????B ;l l o OC o o o qi di qi i di qi di I I U U I I ???????????=??????????????
B 。 2.2.4 SST 小信号模型
根据式(2),将第i 个SST 的输出电流变换至公共坐标系:
o o s c o o Di di i i i Qi qi i i i i ΔΔ????
=+Δ????ΔΔ????
T T δ (40) 式中:00s 00cos()sin()sin()cos()i i i i i δδδδ???
=?????
?T ;
o 0o 0c o 0o 0sin()cos()cos()sin()di i qi i i di i qi i I I I I δδδδ????=???????
T 。
根据式(4),将第i 个SST 的并网端电压用公共坐标系的D 、Q 分量来表示:
b b 11
s V b b di Di i i i qi Qi u u u u ??ΔΔ????=+Δ????ΔΔ????
T T δ (41) 式中:001
s 00cos()sin()sin()cos()i i i
i i δδδδ???=???????
T ; b 0b 01
V b 0b 0sin()cos()cos()sin()di i qi i i di i qi i U U U U δδδδ??+??=????????
T 。
由式(19)、(20)、(25)、(26)、(31)、(32)、(39)、(40)、(41)推出第i 个SST 的小信号状态空间模型,它包含13个状态变量、3个输入量和2个输出量:
b SST SST SST SST SST 1b Di i i i i i Qi u u ωΔ??
Δ=Δ++Δ??Δ????x A x B B ω(42)
输出方程为
o SSTc SST o Di i i Qi i i Δ??
=Δ??Δ??
C x (43) 对于提供参考频率的SST1,还包含1个频率输出:
1SST 1SST1ωΔ=ΔC x ω (44)
式中:
T SST tp []i i i i
di qi di qi i P Q x δ??γγΔ=ΔΔΔΔΔΔΔΔx ; T SST tp []i i i i di qi di qi i P Q x δ??γγΔ=ΔΔΔΔΔΔΔΔx ;
14 中 国 电 机 工 程 学 报 第32卷
P P VA PV VB SST CA VA PV CA V CA VB CB 1OA CA VA PV OB V OC P OA CA V OA C O OA CA VB CB 131300000[00]()i i i i i
i i i i i i i i i i i i i i i i i i i i i i i i i i i ω?×??
??
??=??
+??
??++++????
A B B C B A B D C B C B D B B D D C B T B C B D C B C A B D D D ; SST 1
OB s 132
000i i i ?×??????=
??????B B T ;P 131000i i ωω×??
??
??=??????B B ; SST 1P 1113[000]ωω×=C C ; SSTc c s 213[[00]00[0000]]i i i ×=C T T 。 图1所示的FREEDM 系统包含3个SST ,由式(42)—(44)可得3个SST 的小信号模型: SST SST SST SST b 1SST ωSST o SSTc DQ DQ ωΔ=Δ+Δ??
Δ?????=Δ?????Δ??
???x A x B u C x i
C (45) 式中:T
SST SST1SST2SST3[]Δ=ΔΔΔx x x x ; T SST SST1SST2SST3[]Δ=ΔΔΔx x x x ;
T b b 1b 1b 2b 2b 3b 3[ ]DQ D Q D Q D Q u u u u u u Δ=ΔΔΔΔΔΔu ; T o o 1o 1o 2o 2o 3o 3[ ]DQ D Q D Q D Q i i i i i i Δ=ΔΔΔΔΔΔi ; SST11SST 1SST SST22SST 1SST33SST 13939
000000ωωωωωω×+??
??=+??
??+??A B C A A B C A B C ; SST1SST SST2SST3396
00000×????=??????B B B B ;
SST SST 1139[00]ωω×=C C ; SSTc1
SSTc SSTc2SSTc3639
000000×????=??
????C C C C 。 2.3 网络线路小信号模型
图1微网孤岛运行时的等效电路如图6所示。将第1段线路电流i line1变换至公共DQ 坐标系:
line 1line 1b 1line1line 1line 1b 1line1line1b 2line 11b 2line 11line1d /d 1d /d 01 0D D D Q Q Q D D Q Q i t i u r i t i u L L u i u i L ωω??????
=?+???????????
?????????????????????? (46)
其小信号模型为
line 1line 1NET1NET1NET1line 1line 1line 1b 24load 1line 1[0] [0]D D Q Q Q DQ DQ D i i i i I I ×Δ??Δ??
=+??????ΔΔ????
??
Δ+Δ+Δ?????
A B B u u ω (47)
式中: T b b 1b 1b 2b 2b 3b 3[]DQ D Q D Q D Q u u u u u u Δ=ΔΔΔΔΔΔu ; T
load load 1load 1load 2load 2[]DQ D Q D Q u u u u Δ=ΔΔΔΔu ; line101line1NET1line101line1r L r L ωω???????=???????
?A ;line1NET1line11010L L ??
??
??=??????B 。 按以上方法,可得5段线路的小信号模型:
line NET line NETA b NETB load NET ω1 DQ DQ DQ DQ Δ=Δ+Δ+Δ+Δi A i B u B u B ω (48) 式中:
T line line 1line 1line 2line 2line 5line 5[]DQ D Q D Q D Q i i i i i i Δ=ΔΔΔΔΔΔi ";
T line line 1line 1line 2line 2line 5line 5[]DQ D Q D Q D Q i i i i i i Δ=ΔΔΔΔΔΔi "。
令line line 01NET 01line line //i i i i i r L r L ωω???
=?????
?A , 则NET1
NET2NET NET3NET4NET500000000000000000000????
??
??=??????????
A A A A A A ; 令line NET line 1/001/i
i i L L ??=???
?B ,则 NET1NET1
NET2NETA NET3NET4NET50000
00000???????
??=???
???????
B B B B B B B ;
NET2NETB NET3NET4NET50
00000?????????=??
???????B B B B B ; T NET line 1line 1line 2line 2line 5line 5[...]Q D Q D Q D I I I I I I ω=???B 。
2.4 负荷小信号模型
本文以基本负荷RL 建立公共负荷模型。如 图6所示,微网中包含2个公共负荷,第i 个负荷电流状态方程为
第25期
张明锐等:基于小信号模型的微网控制参数选择与稳定性分析 15
load2load2
2
图6 孤岛微网等效电路
Fig. 6 Equivalent circuit of islanded microgrid
load load load load load load load load load load 1load 1
d /d 1d /d 0
0Di Di Di i
Qi i Qi i Qi Di Qi i t i u R i t L i L u i i ωω??????
=?
+???????????????????
????????
???
???? (49)
其小信号模型为
load load load load load load load load load 1
Di Di Di i i Qi Qi Qi i i u i i u i ωΔΔ??Δ????
=++??????ΔΔΔ????????????ΔA B B ω (50)
式中:load 01load load load 01load i i i i i R L R L ωω???????=???????
?A ;load load load 1010i i i L L ??
????=??
????B ;load load load Qi i Di I I ω??
=?????
B 。
所以系统负荷小信号模型为
load load load load load load ω1
DQ DQ DQ Δ=Δ+Δ+Δi A i B u B ω (51)
式中:T load load 1load 1load 2load 2[ ]DQ D Q D Q i i i i Δ=ΔΔΔΔi ;
T load load 1load 1load 2load 2[]DQ D Q D Q i i i i Δ=ΔΔΔΔi ; T load load 1load 1load 2load 2[]DQ D Q D Q u u u u Δ=ΔΔΔΔu ; load1load load24400×??=???
?A A A ;load1load load24400×??
=????B B B ; load 1load load 241ωωω×??
=????B B B 。
2.5 微网系统模型
由式(45)、(48)、(51)可知,系统模型输入量包含SST 并网端电压u b 和负荷端电压u load ,为建立系统整体模型,在各端点与地之间引入足够大的虚拟阻抗R N ,将u b 、u load 的小信号模型写成如下形式:
b N A o B line ()DQ DQ DQ R Δ=Δ+Δu M i M i (52) load N A load B line ()DQ DQ DQ R Δ=Δ+Δu N i N i (53) 式中M A 、M B 、N A 、N B 分别表示各节点电流流入或流出的情况,其元素值分别为1或?1。根据图6所
示网络,令1001??
=????E ,则A 000000????=????
E M E E ,B 0
000000
00?????=??????E E M E E E E ,A 00???
=?????E N E ,B 00
0000???=?????
E E N E E 。 根据式(45)、(48)、(51)—(53),可得微网系统的小信号模型:
SST SST line sys line load load DQ DQ DQ DQ ????ΔΔ????Δ=Δ????????ΔΔ????
x x i A i i i (54) 式中A sys 为系统状态矩阵,其表达式为
SST SST N A SSTc SST N B sys
NETA N A SSTc NET SST NET
N NETA B NETB B NETB N A load SST load N B load load N A 0()
R R R R R R R ωωωω+??
?
?
=+++???
?
+?
?
A B M C B M A B M C B C A B M B N B N B C B N A B N 。 3 特征值及灵敏度分析
特征值分析法是电力系统小信号稳定性分析的重要手段,它通过计算系统状态矩阵的特征值获取系统的全部振荡模式,并通过对特征值及灵敏度的计算分析,得到有关振荡的深层次信息[17]
。具体
做法是
[18]
:根据式(55),计算特征值λi 对状态矩阵
A sys 对角线元素αkk 的灵敏度,得到系统状态变量和振荡模式间的联系,其中v i 和u i 分别为特征值的左、右特征向量。
sys /[()/]i kk i kk i λααα??=??v A u (55)
建立图6所示的微网模型,计算系统状态矩阵
A sys 的特征值,并对其进行灵敏度分析,从而获得影响微网稳定运行的控制参数选择方法。
系统参数如表1所示。环网额定电压为10 kV ,频率为50 Hz ,具有3个SST 和2个公共负荷,分布式电源通过SST 的700 V 低压直流母线接入,各分布式电源均具备20%的备用容量,整个微网容量为
1 MW 。根据功率分配原则,各SST 下垂系数与其额定容量成反比。微网中各节点间线路长约1.5 km ,其阻抗根据10 kV 线路典型参数计算[19]。SST 滤波器的参数主要考虑截止频率低于开关频率的1/10,
16
中 国 电 机 工 程 学 报 第32卷
表1 系统参数 Tab. 1 System parameters
参数类型
参数
参数值
P SST i /kW [250, 150, 400] R load i /Ω
[198, 324]
L load i /H [0.063, 0.172] r line i /Ω
0.2415
L line i /mH 0.908 微网参数
R N /Ω 1 000 DC-DC 变比/(V/V) 700/18 000
C /μF 4 700
f s /Hz 6 000
I o d /A [18.9, 12.63, 33.77]
I o q /A [?3.347, ?0.628 9, ?4.368] U o d /V
[8 153, 8 153, 8 180]
U o q /V [?36.72, ?36.11, ?7.764] U l d /A [?5653, ?1.203×104, ?1.347×104] U l q /A [2.362×104
, 1.632×104
, 2.024×104
] U b d /V [8 159, 8 159, 8 160] U b q /V [?49.08, ?40.06, ?60.68] I line D /A [5.777, 18.41, ?22.42, 11.36, ?13.13] I line Q /A [?1.089, ?1.732, 2.438, ?1.876, 2.258]
I load D /A [40.83, 24.48] I load Q /A
[?4.171, ?4.134] δ0/rad [0, ?0.001 185, 0.001 605]
ω0/(rad/s)
[314, 314, 314]
3 0001 000?1 000
?3 000
实部/104
虚部
图7 系统状态矩阵的特征值
Fig. 7 Eigenvalue spectrum of the system state matrix
频主特征值主要受到下垂控制参数的影响,由于该区域阻尼较小,其变化更容易导致系统不稳定。
对区域1中距虚轴最近的一对共轭特征值进行Δδ3、 4。?8变的?8变化至1.2×10?5时主特征值的运行轨迹。可以看出主特征值受无功功率下垂系数的影响较小。如图8所
?70
?50
?30 ?10 实部/104
虚部
400200?200?400
图9 k P 1变化时低频主特征值轨迹(1×10?8≤k P 1≤1.2×10?5) Fig. 9 Trace of low frequency dominant eigenvalues with
real power droop gain (1×10?8≤k P 1≤1.2×10?5)
第25期 张明锐等:基于小信号模型的微网控制参数选择与稳定性分析 17
实部/104
虚部
50
?
图10 k Q 1变化时低频主特征值轨迹(1×10?8≤k Q 1≤1.2×10?5) Fig. 10 Trace of low frequency dominant eigenvalues with
reactive power droop gain(1×10?8≤k Q 1≤1.2×10?5)
示,主特征值对状态变量ΔQ i 的灵敏度也很小。
10?7,k P 2=4 建立图6共负荷P 1=150 kvar 。在Q 1=0 kvar ,即系统总的有功负荷由800 kW 降低至
400 kW ,无功负荷由300 kvar 降低至150 kvar ,视在功率降低了50%。仿真结果如图11所示。图11(a)、
(b)分别为公共负荷1的b 相电压及频率。负荷在0.8 s 发生突变后,其电压仍保持稳定,仅有微小的
幅值变化,图中难以显示,频率微调后很快达到稳定,由于有功负荷减少,因此频率略微升高。 图11(c)、(d)为各SST 的有功功率和无功功率输出响应。可看出各SST 的输出功率均有所下降,调整后又达到稳定状态,并按其额定功率大小分配有功升至
,即视间波动,
U l o a d /k V
???
P S S T /k W
?
t /s
(a) 负荷功率波动
P l o a d /k W
t /s
(b) 负荷端频率
F l o a d /H z
50.02050.01050.005
t /s
(c) SST2与公共坐标系夹角
δ2/(10?4 r a d )
????
t /s
(d) SST3与公共坐标系夹角
δ3/(10?4 r a d )
9.259.159.109.20
图12 有功负荷波动时系统的动态响应
Fig. 12 Dynamic response with active load fluctuation
18 中国电机工程学报第32卷
荷低于分布式电源额定功率,频率略高于50Hz,图12表明频率大约在50.007~50.010Hz间波动,波动范围非常小。图12(c)、(d)为SST2、SST3与SST1的相角差δ2、δ3,分别在3.68×10?4和9.15×10?4附近小范围波动。由此可知,稳态时3个SST频率一致,且具有较为理想的环流控制能力。
5 结论
本文构建了基于SST的微型环网小信号模型,将经典下垂控制引入SST,实现微网孤岛运行时的电压和频率控制。根据系统状态矩阵的特征值及灵敏度分析选择功率下垂系数,不仅增强了微网孤岛运行时对突变负荷和波动负荷的适应能力,而且有效地抑制了各SST之间的环流。本文建立的微网小信号模型和控制参数选择方法,对于微型电网的稳定性控制和分析具有较好的借鉴意义。
参考文献
[1] Huang A Q,Crow M L,Heydt G T,et al.The future
renewable electric energy delivery and management (FREEDM) system:the energy internet[J].Proceedings of
the IEEE,2011,99(1):133-148.
[2] 鲁鸿毅,应鑫龙,何奔腾.微型电网联网和孤岛运行控
制方式初探[J].电力系统保护与控制,2009,37(11):
28-31.
Lu Hongyi,Ying Xinlong,He Benteng.Control strategy
for micro-grid in net-connected and islanded operation [J].Power System Protection and Control,2009,37(11):28-31(in Chinese).
[3] Majumder R,Chaudhuri B,Ghosh A,et al.Improvement
of stability and load sharing in an autonomous microgrid
using supplementary droop control loop[J].IEEE Trans.
on Power Systems,2010,25(2):796-808.
[4] Jaehong K,Guerrero J M,Rodriguez P,et al.Mode
adaptive droop control with virtual output impedances for
an inverter-based flexible AC microgrid[J].IEEE Trans.
on Power Electronics,2011,26(3):689-701.
[5] 阚加荣,肖华锋,过亮,等.基于下垂锁相的逆变器并
网控制策略研究[J].中国电机工程学报,2011,31(18):21-26.
Kan Jiarong,Xiao Huafeng,Guo Liang,et al.Study of
control strategy for grid-connected inverters based on dropped PLL[J].Proceedings of the CSEE,2011,31(18):21-26(in Chinese).
[6] Chung I-Y,Liu Wenxin,Cartes D A,et al.Control
methods of inverter-interfaced distributed generators in a
microgrid system[J].IEEE Trans. on Industry Applications,2010,46(3):1078-1088.[7] 刘鸿鹏,王卫,吴辉.光伏逆变器的调制方式分析与直
流分量抑制[J].中国电机工程学报,2010,30(9):27-32.Liu Hongpeng,Wang Wei,Wu Hui.Modulation mode analysis and suppressing DC current of PV inverter [J].Proceedings of the CSEE,2010,30(9):27-32(in
Chinese).
[8] 杨恩星,仇志凌,陈国柱,等.基于载波移相并联的直
驱风力发电并网变流器控制策略[J].中国电机工程学
报,2009,29(21):8-13.
Yang Enxing,Qiu Zhiling,Chen Guozhu,et al.Control
strategy for direct-drive wind generation grid side converter based on carrier phase shifting parallel [J].Proceedings of the CSEE,2009,29(21):8-13(in
Chinese).
[9] Li Yan,Li Y unwei.Power management of inverter
interfaced autonomous microgrid based on virtual frequency-voltage frame[J].IEEE Trans. on Smart Grid,
2011,2(1):30-40.
[10] Sao C K,Lehn P W.Autonomous load sharing of voltage
source converters[J].IEEE Trans. on Power Delivery,
2005,20(2):1009-1016.
[11] 肖朝霞,王成山,王守相.含多微型电源的微网小信号
稳定性分析[J].电力系统自动化,2009,33(6):81-85.Xiao Zhaoxia,Wang Chengshan,Wang Shouxiang.Small-
signal stability analysis of microgrid containing multiple micro sources[J].Automation of Electric Power Systems,2009,33(6):81-85(in Chinese).
[12] Iyer S V,Belur M N,Chandorkar M C.A generalized
computational method to determine stability of a multi- inverter microgrid[J].IEEE Trans. on Power Electronics,2010,25(9):2420-2432.
[13] 张明锐,刘金辉,金鑫.FREEDM微型电网及其继电
保护研究[J].电力系统保护与控制,2011,39(7):95-99.Zhang Mingrui,Liu Jinhui,Jin Xin.Research on the FREEDM micro-grid and its relay protection[J].Power
System Protection and Control,2011,39(7):95-99(in
Chinese).
[14] Sabahi M,Goharrizi A Y,Hosseini S H,et al.Flexible
power electronic transformer[J].IEEE Trans. on Power Electronics,2010,25(8):2159-2169.
[15] 刘海波,毛承雄,陆继明,等.基于无互联线控制的电
子电力变压器并联技术[J].电力系统自动化,2007,
31(15):55-60.
Liu Haibo,Mao Chengxiong,Lu Jiming,et al.Parallel
operation of electronic power transformers without control
interconnections[J].Automation of Electric Power Systems,2007,31(15):55-60(in Chinese).
[16] Pogaku N,Prodanovic M,Green T C.Modeling,analysis
and testing of autonomous operation of an inverter-based microgrid[J].IEEE Transactions on Power Electronics,
第25期
张明锐等:基于小信号模型的微网控制参数选择与稳定性分析 19
2007,22(2):613-625.
[17] 李贻凯,刘明波.多故障暂态稳定约束最优潮流的轨迹
灵敏度法[J].中国电机工程学报,2009,29(16):42-48. Li Yikai ,Liu Mingbo .Trajectory sensitivity method for transient stability constrained optimal power flow under multi-contingency condition[J].Proceedings of the CSEE ,2009,29(16):42-48(in Chinese).
[18] 廖清芬,刘涤尘,党杰,等.励磁系统模型和参数对低
频振荡特征值的灵敏度分析[J].电力自动化设备,2009,29(3):69-73.
Liao Qingfen ,Liu Dichen ,Dang Jie ,et al .Sensitivity analysis of low frequency oscillation eigenvalue to excitation system model and parameter[J].Electric Power Automation Equipment ,2009,29(3):69-73(in Chinese). [19] 牟晓春,毕大强,任先文.低压微网综合控制策略设计
[J].电力系统自动化,2010,34(19):91-96. Mou Xiaochun ,Bi Daqiang ,Ren Xianwen .Study on control strategies of a low voltage microgrid [J].Automation of Electric Power Systems ,2010,34(19):91-96(in Chinese).
[20] 张国荣,齐国虎,苏建徽,等.并联型有源电力滤波器
输出电感选择的新方法[J].中国电机工程学报,2010,
30(6):22-27.
Zhang Guorong ,Qi Guohu ,Su Jianhui ,et al .A new method of output inductance selection in shunt active power filter[J].Proceedings of the CSEE ,2010,30(6):22-27(in Chinese).
收稿日期:2012-02-13。 作者简介:
张明锐(1971),男,副教授,硕士生导师,研究方向为电力系统保护与控制、分布式发电与微网技术,zmr@https://www.360docs.net/doc/3c5298575.html, ;
黎娜(1987),女,硕士研究生,研究方
向为应用于智能电网的固态变压器;
杜志超(1988),男,硕士研究生,研究方向为分布式电源并网;
徐而峰(1988),男,硕士研究生,研究方向为应用于智能电网的固态变压器;
陈洁(1989),男,硕士研究生,研究方向为微网经济运行。
张明锐
(责任编辑 刘浩芳)
现代信号处理_公开题
1. (必选,10分)在统计信号处理中,人们常常假设信号或噪 声服从高斯分布, 充分说明这个假设的理论根据以及在实际应用中带来的优点。 2. (必选,10分) (高阶累积量) 设1()[(),,()]T N N t x t x t C =∈x 为一复值 矢量随机过程,假设()t x 的每个分量的均值和奇次矩都为零,给出123456***6[(),(),(),(),(),()]m m m m m m Cum x t x t x t x t x t x t 的M-C 公式,其中 12345,6,,,,1,,m m m m m m N = ,上标T 和*依此表示取转置和复共轭。 3.1(三选一,10分)假设存在一个由11个阵元构成的立体阵 列,建立x-y-z 直角坐标系,11个阵元的坐标分别为(1, 1,1) ,(1,2,1),(2,1,1),(2,2,1),(1,1,2),(1,2,2),(2,1,2),(2,2,2),(1,2,3),(2, 1,3) ,(2,2,3),空间远场处一信号源发射电磁波,假设信号源方位角为?,俯仰角为θ,波长为λ,试写出阵列相对于该信号源的导向矢量。 3.2(三选一,10分) 证明导向矢量矩阵与信号子空间之间可 以互相(张成)表示。
3.2(三选一,10分)推导Levinson 递推公式。 4.1(二选一,10分)在卡尔曼滤波中,用下标“i ”表示时刻“i t ” 。给定状态方程和观测方程的离散形式分别为 .11,111i i i i i i i i -----=++x Φx Γu w i i i i =+z H x v 式中i x 是1n ?维状态向量;i u 是1r ?维控制向量,它是确定的非随机向量;已知的.1i i -Φ和,1i i -Γ分别为n n ?的状态转移矩阵和n r ?的控制矩阵;i w 为1n ?维随机噪声;i z 为1m ?维观测向量;已知的i H 为的m n ?维矩阵;i v 为-1m ?维量测噪声向量。假定两个噪声向量i w 和i v 皆为空时白的。1)给出预测值估计/1?i i -x 和滤波估计 /?i i x 及其相应的协方差矩阵的递推公式(6分);2) 从滤波估计/?i i x 的协方差矩阵估计出卡尔曼滤波的增益矩阵i K (4分)。 4.2 (二选一,10分)分析算式的计算复杂性(仅记乘除次数,精确到最高二次) 5.1(二选一,10分)推导多参数估计的Cramer-Rao 下界。 5.2 (二选一,10分)在白噪声干扰下,给出用方程误差方法 和矩阵结构分析方法无偏估计ARMA 系统参数的理论。
SLR-22-A交通信号控制系统(简列)说明书
产品图片: 一、 信号控制系统接线说明: 东西方向 南北方向
随着科技的发展,道路交通管理日渐复杂。我们开发、生产出最新的科学化合理性的全中文LCD(液晶)道路智能交通信号控制系统,可以充分展现你的管理才能,让你更加轻松、便捷的管理道路交通。此产品有10大优点如下: ●以变应变多时段、多方案、手动、黄闪、右转全天侯黄闪/长绿等多种 控制模式任意选择。 ●维护容易模块化的设计,自动显示故障内容,设备维护与故障排除永 远快人一步。 ●完善的服务售前早期培训与售后技术指导,买的放心,用的安心。 ●所见既所得菜单设置中面板模拟指示与路口实际情况对应,易学易用。 ●安全更多保障接线位置升高,防止因大雨路面积水漏电影响设备稳定。 ●傻瓜操作面板功能调整及设置常用功能无须看复杂的说明书即会操作。一 接线方式简单按照东西南北区域划分符合现场施工习惯。 ●超强保护功能漏电保护、防雷保护、输出短路保护、大电流冲击保护。 ●视频操作指南首家推出听、看、学三位一体教学方式,科学、实用、易懂。 ●智能绿冲突保护设置时自动检测绿冲突,自动提示、预防制止绿冲突发生。 ●智能化的管理前端控制系统和后端可以与电脑互相联网,联网方式为光纤 转232上位机通信,通信前端和后端软件同步协议。 ●升级方式:产品功能和通信方式可根据需要进行修改,不需修改硬件 二、功能与特点: 1、嵌入式中央控制系统,工作更加稳定可靠。 2、全天候室外机箱,装有避雷及电源过滤装置。 3、整部机器采用模块化设计, 便于维修和功能扩充。 4、22路、6组灯独立控制输出,典型工作电流10A。 5、可扩展RS-232、RS-485接口与上位机通讯。 6、可在线调整、检查和设置。 7、有2×7个工作时段,供平常日和节假日分别工作。 8、有21个工作模式,可在任意时段多次调用。 9、每个可编程菜单可编程99步,每步定时为1~255秒。 10、每个信号灯的闪烁状态可设,闪烁频率、闪烁时间可调、右转全天候黄闪可设、四面红、人生提前灭可设。 11、夜间黄闪时间/关机(无输出)可任意设置。 12、可随时进入紧急黄闪状态设置。 13、手动控制可在随机和指定菜单下实现单步运行。 14、自动掉电保护,工作参数可保存十年。 15、自动检测绿冲突。当绿冲突出现时,自动提示待解决后才允许进入下一步设置。 16、自动检测产品工作性能,当有冲突或设置错误是,信号控制系统降级为黄闪,产品出故障是,LCD自动提示,故障原因,这样的显示功能,维护时间将比传统的数码显示控制系统将节省95%以上的时间,让我的服务更便捷,让我们的客户更满意; 17、模拟路口显示,信号机面板上有一个模拟路口,模拟车道及人行道运行,设置更为便捷。
现代信号处理课程设计报告
中南大学 课程设计报告 题目现代信号处理 学生姓名任秋峥 指导教师张昊、张金焕 学院信息科学与工程学院 学号 0909090711 专业班级电子信息专业0901班 完成时间 2011年9月7号
目录 第一章、课程设计题目 (3) 1.1题目 (3) 1.2课程设计要求 (3) 第二章、设计思想概述 (4) 2.1离散时间L TI系统及其脉冲响应 (4) 2.1.1、离散时间L TI系统 (4) 2.1.2离散时间系统的脉冲响应 (5) 2.2、采样定理及连续时间信号的傅里叶变换 (6) 2.3序列FFT (7) 2.4滤波器的设计 (9) 2.4.1、IIRDF的设计 (9) 2.4.2 FIRDF的设计 (11) 第三章、程序设计及关键部分功能说明 (13) 3.1、差分方程的单位脉冲响应程序设计 (13) 3.1.1差分方程在各个点的单位脉冲响应设计和分析 (13) 3.2、验证采样定理 (14) 3.2.1、连续时间信号的傅里叶变换 (14) 3.2.2、采样定理 (16) 3.3、冲击序列和矩形序列的8点和16点FFT (17) 3.3.1冲击序列的FFT (17) 3.3.2矩形序列的fft (18) 3.4、滤波器的设计 (18) 3.4.1、IIRDF的设计 (18) 3.4.2、FIRDF的设计 (19) 第四章、程序实现 (21) 4.1、差分方程 (21) 4.2采样定理 (22) 4.3、FFT (25) 4.4滤波器的设计 (28) 4.4.1、IIRDF设计 (28) 4.4.2、FIR滤波器的设计 (29) 第五章、附录 (33) 5.1源程序代码 (33) 5.2参考文献 (39) 第六章、小结与体会 (39)
JK-B交通信号控制机使用说明书-12页word资料
使 用说明书 JK-B 交通信号控制机 一、概述 JK-B 型交通信号控制机,适用于各种十字、丁字等 交叉路口,控制机动灯红、黄、左转绿、直行绿及行人红、绿灯的通、禁行工作时间, 自动执行控制设置。可根据不同路口或同一路口不同时间段车流量的大小,设置相应的通、禁行时间。对维护交通秩序,改善路口通行率,避免路口交通事故起到举足轻重的作用。 控制系统采用自行开发设计的微处理器控制,可实现全天侯自动控制,或夜间自动关机的工作方式。本系统设计先进,具有多时段多方 案运行、自动和手动控制 转换、断电保护等功能,使路口间协调控制,不会因断电而丢失时间信息和控制参数。另外还采用了可控硅驱动电路,改善了无触点磨损,延长其使用寿命。 本机具有外型美观,结构简单合理,操作简便灵活,实用性强,稳定性好,可靠性高,功损耗小,使用寿命长等特点,是控制交通信号的高科技产品。 二、技术指标 1.工作电压:AC 220V ±10% 频率:50~60Hz 2.功耗:≤15W 3.每路输出负载:≤800W 4.工作环境温度:-40oC ~+50oC 5.相对湿度:≤95% (温度在25oC 时) 6.外形尺寸:460×340×180 (单位:mm ) 7.主机重量:7kg
8.使用寿命:>50000h 9.系统时钟:24小时制,日误差小于±1秒 10.系统可调:红、绿步0~99可调;黄、绿闪步0~9可调。 三、基本功能 (一)本机有四套不同的配时方案和两个特殊方案 1.四套不同的配时方案 根据一天内交通流量的规律性变化本机设定了四套不同的方案,即低峰、次低峰、次高峰、高峰。高峰期是在车流量最多的时候,适当加长配时方案周期,以便让更多的车辆通行;低峰期是在车流量最少的时候,适当减少配时方案周期,以免车辆在路口空等,浪费行车时间。 2.两个特殊方案 (1)黄灯方案:本机规定第5个方案为闪黄灯方案。当执行该方案时,将控制路口安装的黄灯均以1秒/次的速度不断的闪烁,其余的灯不亮,直到退出该方案为止。 (2)关机方案:本机规定第6个方案为关机方案。当执行该方案时,所有交通灯熄灭,但控制机仍通电工作。 (二) 本机把全天分为10个时段,在不同的时段里可以根据交通流量的规律性变化,选择执行四套配时方案和两个特殊方案中的其中一个,以适应不同路口的需要。 (三) 本机把每一个配时方案划分为20个工作步 即由第1个工作步到第20个工作步,按逐步递增的方式循环运行。各工作步伐,规定如下(具体分析请见附表2)。 1.可变步伐:第1、6、7、11、16、17六个工作步为可变步。一般情况下,改变周期的长短,只需改变第1、6、11、16四个工作步即可,变化范围为0~99秒,第7、17两个工作步的变化范围为0~9秒。 2.闪绿灯步伐:第2、3、8、12、13、18六个工作步为闪绿灯步。其中,第2、12两个工作步为行人灯绿闪;第3、8、13、18四个工作步为机动灯绿闪。其机器在出厂时,初始值均为3秒。一般情况下,可以直接使用,不需修改。如另有要求需作改变时,可通过相应的输入按钮重新设定,其变化范围是0~9秒。
用极大似然法进行参数估计
北京工商大学 《系统辨识》课程上机实验报告(2014年秋季学期) 专业名称:控制工程 上机题目:极大似然法进行参数估计专业班级: 2015年1 月
一 实验目的 通过实验掌握极大似然法在系统参数辨识中的原理和应用。 二 实验原理 1 极大似然原理 设有离散随机过程}{k V 与未知参数θ有关,假定已知概率分布密度)(θk V f 。如果我们得到n 个独立的观测值,21,V V …n V ,,则可得分布密度)(1θV f ,)(2θV f ,…,)(θn V f 。要求根据这些观测值来估计未知参数θ,估计的准则是观测值{}{k V }的出现概率为最大。为此,定义一个似然函数 ) ()()(),,,(2121θθθθn n V f V f V f V V V L = (1.1) 上式的右边是n 个概率密度函数的连乘,似然函数L 是θ的函数。如果L 达到极大值,}{k V 的出现概率为最大。因此,极大似然法的实质就是求出使L 达到极大值的θ的估值∧ θ。为了便于求∧ θ,对式(1.1)等号两边取对数,则把连乘变成连加,即 ∑== n i i V f L 1 )(ln ln θ (1.2) 由于对数函数是单调递增函数,当L 取极大值时,lnL 也同时取极大值。求式(1.2)对 θ的偏导数,令偏导数为0,可得 0ln =??θL (1.3) 解上式可得θ的极大似然估计ML ∧ θ。 2 系统参数的极大似然估计 Newton-Raphson 法实际上就是一种递推算法,可以用于在线辨识。不过它是一种依每L 次观测数据递推一次的算法,现在我们讨论的是每观测一次数据就递推计算一次参数估计值得算法。本质上说,它只是一种近似的极大似然法。 设系统的差分方程为
集成电路工程领域085209
集成电路工程领域(085209) 全日制攻读工程硕士专业学位研究生培养方案 一、培养目标 培养掌握集成电路工程专业领域坚实的基础理论和宽广的专业知识,具有较强的解决实际问题的能力,能够承担相应的专业技术或管理工作,特别是为大中型企业培养应用型、复合型高层次工程技术和工程管理人才。具体要求为:1.拥护党的基本路线和方针政策,热爱祖国,具有良好的职业道德和敬业精神,具有科学严谨、求真务实的学习态度和工作作风,身心健康。 2.掌握集成电路工程专业领域的基础理论和专业知识,掌握解决工程问题的先进技术方法和现代技术手段;具有独立承担专业技术或工程管理工作的能力和良好的职业素养。 3.掌握一门外国语。 二、研究方向 1. 集成电路系统设计技术 主要研究集成电路及各类信息系统的设计理论、方法与技术,包括软硬件协同设计,IC设计过程,系统级设计方法与工具,集成电路系统模型研究,系统级规范与建模语言,集成电路系统指标研究及噪声分析、集成电路测试与可测性设计以及模拟和混合信号测试等。 2. SOC与嵌入式系统技术方向 研究数字集成电路设计技术SOC设计方法、SoC设计的性能验证方法,微处理器结构设计、处理器建模与设计工具,嵌入式基础理论、嵌入式软件建模与设计,数字低功耗设计技术、具备嵌入式系统在移动数字通信、移动多媒体、网络技术、信息家电、工业控制等领域的软件与系统设计、开发能力。 3.MEMS建模、优化与控制技术 针对MEMS器件制造工艺不同于常规的机械加工,性能受到尺度效应影响以及具有小惯性和大耗散阻尼的特点,研究MEMS器件遵循的微观物理规律,在此基础上对其进行性能分析,并且设计出低成本的、易于实现单片集成的控制装置。 4.基于FPGA的SOPC嵌入式系统设计 基于FPGA的片上可编程系统设计、嵌入式系统编程和测试技术研究、模拟可编程电路设计、操作系统的移植和系统的编程和配置技术,集成验证技术等。
JK_B、JK_C、JK_C1、JK_C2道路交通信号控制机说明书
.word可编辑. 一、简介 JK-B、JK-C、JK-C1、JK-C2型多时段定时式智能多相位信号控制仪是由南昌金科交通科技股份有限公司开发研制的,符合GB/T25280-2010标准,该系列产品针对各种繁忙路口和复杂的交通流量下的车辆及行人进行通行控制,运用单片机及I2C总线技术进行控制,采用工业级CPU,软硬件看门狗技术使控制仪能在各种恶劣条件下正常工作。硬件设计将控制仪电源与输出负载电源分离,当负载回路发生短路故障时,能自动断开输出回路,并有指示灯指示。使用先进的软件设计思路,简便易行的操作方法,能方便实现对28路(JK-B)、44路(JK-C、JK-C1、JK-C2)输出控制。JK-B型信号机一般多用于机动四灯、五灯的控制上,JK-C、JK-C1、JK-C2型信号机较适用于多车道箭头灯控制上。 二、功能特点 ?保护功能。当外界电网波动引起电压、电流过大或信号输出严重短路故障,超出信号机 承受能力时,本机自动断开强电,使本身得到保护,而控制线路继续工作,同时,面板上保护指示灯亮,通知用户查明故障原因。 ?四种运行模式,分别为平日、双休、假日、临时,每种模式下最多可设置十个时段,每 个时段内最多可设置八个相位。 ?信号机停电后继续自动走时,并可保持设定好的数据在十年以内的时间不丢失。 ?如遇紧急情况,可以手动强制通行。 ?内设硬件、软件看门狗技术。 ?可设置夜间黄闪和信号灯全部关闭功能。 ?在信号灯转换时,可设置绿闪、红闪、红黄同亮三种转换模式。 ?面板模拟路口运行,车道及人行道显示,六位LED数码管构成友好人机对话界面。 ?十六个工作指示灯,显示控制器运行状态,十一个按键采用先进设计思想,操作灵活简 便,功能强大。 ?具有故障检测功能,可以检测红绿灯故障、是否有绿冲突。(JK-C2型) ?带有外接手控操作面板接口,方便手控操作。(JK-C1型) ?带有实时倒计时通讯接口,提高倒计时显示的准确性、及时性。(JK-C1型) ?全金属外壳,防尘、防电磁干扰、耐用、可靠性好。 ?抗冲击、震动,可经受路面工作环境的冲击、震动。可经受各种交通工具正常运输时所 产生的冲击及震动而不影响机器性能。 ?具有无线缆协调控制(绿波带)功能。
实验报告
上海对外经贸大学 Stata 实验报告 二〇一三年十二月
实验一 一、实验目的 1、研究问题:根据历史数据识别可能拖欠贷款的客户特征,进而预测潜在信贷客户拖欠贷款的可能性 数据文件及变量:bankloan.sav ?因变量:default(0,1) (1代表拖欠贷款,0代表正常) ?自变量:ed(文化程度);employ(现单位工作年数); debtinc(负债比率);address(现居住地居住年数); creddebt(信用卡负债数)… ?Age、employ、address、income、debtinc、creddebt、othdebt均为连续变量?教育水平分别用1、2、3、4、5表示高中以下、高中、大学、大专、研究生 2、统计分析问题:建立一个预测因变量取1概率的logistic回归模型,并对因变量的缺失值进行预测。 二、实验步骤 1、准备数据 由于“default”变量可能存在缺失值,所以要新建一个变量"validate",当default=0不为缺失值时,将validate=1,然后通过validate来判断将不缺失的值纳入回归分析:GET FILE='C:\Users\Administrator\Desktop\SPSS\bankloan.sav'. DATASET NAME 数据集1 WINDOW=FRONT. IF (missing(default)=0) Validata=1. EXECUTE. 2、统计分析 进行分析>>回归>>二元Logistic操作,进入如下对话框:
点击右上角“分类”按钮,进入如下的对话框: 该对话框用来设置自变量中的分类变量,左边的为刚才选入的协变量,必须将所有分类变量选入右边的“分类协变量框中”。本例中只有“Level of education [ed]”为分类变量,将它选入右边框中。点击“继续”按钮返回主界面。 回到主界面后点击“选项”按钮,进入对话框:
课程名称:现代信号处理-------高阶统计量及其谱分析(精)
课程名称:现代信号处理 -------高阶统计量及其谱分析 课程编号:0211007(博士生 0221024(硕士生学分:3 学时:46 授课对象:博士 /硕士研究生任课教师:姬红兵教授 联系电话:88204144 地点 :办公楼 424室 Email: 教材: 1. Higher-Order Spectral Analysis, C. L. Nikias and A. P. Petropulu, Prentice Hall, 1993. 参考资料: 1、“高阶统计量及其谱分析” ,张贤达,清华大学出版社。 2、“现代信号处理” ,张贤达,清华大学出版社。 3、期刊:IEEE Transactions on Signal Processing, Proceedings of IEEE, IEEE Signal Processing Magazine等。 6、 HOS 主页:. 先修课程:信号与系统,随机信号分析(处理 ,数字信号处理。 课程介绍:本课程主要介绍现代信号处理中的“高阶统计量及其谱分析”和“时频分析” 等内容。重点介绍随机信号和确定性信号的矩和累积量以及高阶谱的定义和基本性质; 高阶累积量和高阶谱的估计方法, 包括常规非参数估计法和基于 AR 、MA 和 ARMA 模型的参数估计法。并介绍高阶累积量及其谱在信号检测、系统辩识、非线性检测等方面的应用。
课程目的:通过本课程的学习,使学生对高阶统计量及其谱的性质和估计算法, 估计性能、计算复杂性, 以及这些算法在信号处理和相关研究领域的应用奠定一个坚实的基础。 考核方式及要求: 1、考核方式:笔试(硕士生+综述或研究报告 2、提交内容:文献专题综述(或翻译报告或研究报告 1篇。要求打印稿和电子版文件一同提交。电子版文件命名格式:“现代信号处理 07(博 /硕 -姓名”发至 hbji@https://www.360docs.net/doc/3c5298575.html,。 3、提交期限:于 2007年 6月 30日前; 更新日期:2007年 3月 1日 课程内容第一部分基本定义与性质 一 . 绪论 1.1 功率谱 1.2 信号处理中为什么用多谱? 1.3 应用 二 . 随机信号的累积量谱 2.1 引言 2.2 矩和累计量 2.3 累积量谱 2.4 非高斯线性过程的累计量谱
无模型自适应控制方法的应用研究
无模型自适应控制方法的应用研究 XXX (北京化工大学自动化系,北京100029) 摘要:概述了一种新型的控制方法无模型自适应控制。目的是对当前无模型自 适应控制有一个总体的认识, 它是一种无需建立过程模型的自适应控制方法。与传统的基于模型的控制方法相比,无模型控制既不是基于模型也不是基于规则,它是一种基于信息的控制方法。无模型控制器作为一种先进的控制策略,具有很强的参数自适应性和结构自适应性。基于以上背景,首先介绍了无模型自适应控制的性质及特征,结合对北京化工大学405仿真实验室三级液位控制系统的仿真研究,并将其与PID控制器的效果进行了对比。仿真表明, 无模型控制器具有良好的抗干扰能力、参数自适应性和结构自适应性。 关键字:无模型;自适应;控制; Model Free Adaptive Control Theory and its Applications XXX (Department of Automation, Beijing University of Chemical Technology Beijing 100029) Abstract: A new kind of control method model-free adaptive control is given. The purpose is to make MFA to be understood. Model free adaptive control(MFAC)theory is an adaptive control method which does not need to model the industrial process.Compared with traditional control methods based on modeling,MFAC is an advanced control strategy which based on information of Input/Output Data.It has parameter adaptability and structure adaptability.Based on the background,First the property and character of MFA are introduced, Then Combining 405 Simulation Laboratory of Beijing University of Chemical technology three- level control system simulation.The simulation results show that MFAC controller has excellent robustness,anti-jamming capability, parameter and structure adaptability.
交通信号灯自动控制系统说明书
交通信号灯自动控制系统说明书 课程设计2008-12-28 16:34:46 阅读1674 评论4 字号:大中小订阅 1 概述 1.1 设计目的 (1)掌握CPU与各芯片管脚连接方法,提高接口扩展硬件电路的连接能力; (2)通过对交通灯信号自动系统的模拟控制,进一部提高应用8255A并行接口技术,8253定时功能,8259A中断管理控制器的综合应用能力; (3)掌握基本汇编源程序编制方法,学会综合考虑各种设计方案的对比和论证。 1.2 设计要求 交通信号灯自动控制系统须满足下列要求和功能: (1)首先车行道亮绿灯45s,同时人行道亮红45s; (2)45s后,车行道黄灯闪烁3次,亮、灭各1s,此时人行道仍维持红灯; (3)6s后,转为人行道亮绿灯20s,车行道亮红灯20s; (4)20s后,再转到第(1)步,如此循环往复; (5)当有车闯红灯时,能实现报警信号持续3 s的扩展功能。 1.3 设计方法及步骤 1、设计系统硬件部分 (1)先进行方案论证,确定最终采取硬件定时还是软件定时,是查询方式还是中断方式; (2)在具体甄选设计过程中可能要设计的芯片,分析它们的功能特点,确定它们的工作模式; (3)按照各芯片的使用特点以及本系统的设计要求逐步连接,画出系统硬件连接图。 2、设计系统的软件部分 (1)先进行程序编制方式的方案论证,讨论分析,确定是采用宏程序调用还是子程序调用模式; (2)确定本系统设计可能涉及的源程序各个模块,明确各个模块的各自功能,分清它们相互之间的调用关系; (3)画出各个模块的程序流程图; (4)依据流程图,编制出交通信号灯自动控制系统的完整汇编源程序。 1.4 设计说明 (1)本设计采用共阳极的发光二极管模拟对应的交通信号灯的型式,参见后面“系统硬件部分设计”中“总体设计”这一节; (2)本设计关于有车闯红灯报警的扩展功能,是通过红外线接收装置实现的,具体分析见后面“可编程芯片说明及其地址范围确定”中“8254定时/计数器”这一节; (3)在本设计的最初方案中,本来是有电子眼拍摄闯红灯车牌号的这一很实用、很现实化的扩展功能的,但由于实现这种功能的电路芯片资料难以搜集,芯片电路连接复杂以及芯片工作模式,工作环境,工作特点的难以确定,最终被舍弃,只留下报警功能; (4)本设计在很多方面,比如译码器的选择,定时器选型,程序调用方式等等尽量做到不与本组其他成员雷同,程序编制力求简便清晰,硬件连接图在保证每根具体用到的管脚线都能被表示出来的同时,力求线路连接清晰明确,尽量不使线与线之间过于缠绕。 2 方案论证 2.1 软件定时与硬件定时 本任务要求交通信号灯能实现自行定时、延时、切换等功能,即能实现交通信号灯自动控制。一般计算机控制系统实现定时或延时有两种基本方法:利用软件定时 或使用可编程硬件芯片,即硬件定时。
用极大似然法进行参数估计
北京工商大学 《系统辨识》课程 上机实验报告 (2014年秋季学期) 专业名称:控制工程 上机题目:极大似然法进行参数估计 专业班级: 2015年1月 实验目的 通过实验掌握极大似然法在系统参数辨识中的原理和应用。
二实验原理 1极大似然原理 设有离散随机过程{V k }与未知参数二有关,假定已知概率分布密度 fMR 。如果我们 得到n 个独立的观测值 V 1 ,V 2,…,V n ,则可得分布密度 , f (V 20),…,f(V n 0)。 要求根据这些观测值来估计未知参数 二,估计的准则是观测值 {{V k } }的出现概率为最大。 为此,定义一个似然函数 LMM, f(Vn" 上式的右边是n 个概率密度函数的连乘, 似然函数L 是日的函数。如果L 达到极大值,{V k } 的出现概率为最大。 因此,极大似然法的实质就是求出使 L 达到极大值的二的估值二。为了 便于求d ,对式(1.1 )等号两边取对数,则把连乘变成连加,即 n 解上式可得二的极大似然估计"ML O 2系统参数的极大似然估计 Newton-Raphson 法实际上就是一种递推算法,可以用于在线辨识。不过它是一种依每 L 次观测数据 递推一次的算法,现在我们讨论的是每观测一次数据就递推计算一次参数估计值 得算法。本质上说,它只是一种近似的极大似然法。 设系统的差分方程为 a(z') y(k) =b(z°)u(k) + :(k) (2.1 ) 式中 a(z') =1 a 1z^ …a n z 」 b(z')二 b ° …dz" 因为(k)是相关随机向量,故(2.1 )可写成 a(z')y(k) =b(zju(k) +c(z')g(k) (2.2 ) 式中 c(z') ;(k)二(k) (2.3 ) c(z\ =1 C|Z ,亠 亠 (2.4 ) ;(k)是均值为 0的高斯分布白噪声序列。多项式 a(z=) , b(z*)和c(z^)中的系数 a i,..,a,b o ,…b n,G,…C n 和序列{^(k)}的均方差o ■ ln L =瓦 ln f (V i 日) 由于对数函数是单调递增函数,当 对二的偏导数,令偏导数为 0,可得 :: ln L cO i 4 L 取极大值时,lnL 也同时取极大值。求式 (1.2 ) 1.2 ) =0 (1.3 )
道路交通信号控制机使用说明手册
DJX-120W信号机使用手册 新中新*安畅DJX-120W智能交通信号机在充分消化和吸收国内外先进交通控制理论和技术的基础上、结合我国城市交通的复杂状况,开发出的具有自主知识产权的智能交通信号机。DJX-120W信号机既可实现城市路口交通信号的单点控制,也可多机联网实现主干道控制、区域控制,可适用于大、中、小城市的各种十字路口、丁字路口的交通信号控制,是现代城市交通信号控制的理想设备。 功能综述 DJX-120W型信号机是一款集中协调式信号机。全面采用ARM CORTEX 32技术,通过CAN总线连接智能节点的分布式架构,实现多机控制方案硬备份技术,实现独立硬黄闪技术。提供多种灵活有效的信号控制用户配置接口,使得同一套信号机在不同的用户要求下,只需要调整控制方案就可以满足。具备双时钟技术,使得特别依赖时钟进行运行的信号机更加可靠。这些技术提高了运行效率、可靠性,安全性,降低了维护成本。外部接口采用多串口、单网口技术,满足线控,面控,指挥中心控制全部要求。通过液晶、设置终端、指挥中心都可以实现完整的方案设置和状态监测。全兼容GB/T 20999-2007 通讯协议与指挥中心后台通讯。 控制方式:有缆线控、无缆线控、定时、感应、系统优化、单点优化、区域协调 最大时基调度数:40 个 最大时段表数:16 个 最大时段数:48 个 最大方案数:32个 最大阶段表数:16个 最大阶段数:16个 最大相位数:32个 最大通道数:32个 最大车检器数:32个 最大行人按钮数:16个
架构综述 本机采用分布式多模块架构,基本配置包括主灯控模块、液晶显示模块、综合控制模块、车检模块、3个辅灯控模块,各模块运算核心采用ARM芯片,主频72MHz。本地配置240×128点阵LCD终端显示信号机各项参数与状态, 配置4×6键盘输入设备,操控设置信号机。
实验六 参数估计与假设检验
实验六参数估计与假设检验 一、实验目的: 学习利用spss对数据进行参数估计与假设检验(参数估计,单样本、独立样本、配对样本T 检验)。 二、实验内容: 某助眠药物临床实验征集了20位被试,试验后得数据表包含被试的性别、身高、体重、用药前睡眠时长及用药后睡眠时长。试就该数据估计性别对未使用药物时睡眠时长的影响、检验被试总体身高与165差距是否显著、对不同性别的被试的身高和体重变量进行独立样本T 检验、并检验药物是否对被试有用。 三、实验步骤: 参数估计 1、定义变量并输入数据 2、选择菜单“分析→描述统计→探索”弹出“探索”对话框,将对话框左侧的变量框中“用药前睡眠时长”添加到因变量列表,“性别”添加到自变量列表 3、点击“统计量”,弹出“探索:统计量”对话框,勾选描述性并设置均值置信区间为95%,单击“继续” 4、单击“确定”按钮,得到输出结果,对结果进行分析解释。 单样本T检验 1、定义变量并输入数据 2、选择菜单“分析→比较均值→单样本T检验”,弹出“单样本T检验”对话框,将对话框左侧的变量框中的“身高”添加到右侧的“检验变量”框中,将检验值设为165; 3、点击“选项”,弹出“选项”对话框,将置信区间百分比设为95%,点击“继续” 4、单击“确定”按钮,得到输出结果,对结果进行分析解释。 独立样本T检验 1、定义变量并输入数据 2、选择菜单“分析→比较均值→独立样本T检验”,弹出“独立样本T检验”对话框,在对话框左侧的变量列表中选变量“身高”“体重”进入检验变量框,选变量“性别”进入控制列表框 3、点击定义组,在组1(1)中填写1,组2(2)中填写2,点击继续, 4、点击“确定”按钮,得到输出结果。对结果进行分析解释。 配对样本T检验 1.打开一份可用数据。 2.选择分析→比较平均值→配对样本T检验,选择一对配对样本“用药前睡眠时长”和“用 药后睡眠时长”,将“用药前睡眠时长”拖至“variable1”,“用药后睡眠时长”拖至“variable2”,单击“选项”设置置信区间为95%,点击“确定”查看自定义结果。
现代信号处理课设报告
中南大学 本科生课程设计报告 课程名称现代信号处理 指导教师赵亚湘 学院信息科学与工程学院专业班级通信工程班 姓名 学号
题目一语音信号去噪处理 一、设计要求 1)在windows系统下的录音机录制一段1s左右的语音信号作为原声信号,在 MATLAB软件平台下,利用函数wavread对语音信号进行采样,记住采样频率和采样点数; 2)画出语音信号的时域波形,对采样后的语音进行fft变换,得到信号的频谱特 性;对语音信号分别加入正弦噪声和白噪声,画出加噪信号的时域波形和频谱图; 3)根据对加噪语音信号谱分析结果,确定滤除噪声滤波器的技术指标,设计合适 的数字滤波器,并画出滤波器的频域响应; 4)用所设计的滤波器对加噪的信号进行滤波,在同一个窗口画出滤波前后信号的 时域图和频谱图,对滤波前后的信号进行对比,分析信号变化; 5)利用sound(x)回放语音信号,验证设计效果。 二、设计思想和系统功能分析 1、设计原理 对语音信号进行读取 加正弦/高斯白噪声 对比分析加噪声前后信号时域、频域图 设计滤波器 滤波,与原信号比较 2、本课题的研究基本步骤如下: ①确定已知声音信号的存储路径。
②在MATLAB平台上读入语音信号。 ③绘制频谱图并回放原始语音信号。 ④利用MATLAB编程加入一段正弦波噪音,设计滤波器去噪。 ⑤利用MATLAB编程加入一段随机噪音信号,设计FIR和IIR滤波器去噪,并分别绘制频谱图、回放语音信号。 ⑥通过仿真后的图像以及对语音信号的回放,对比两种去噪方式的优缺点。 三、设计中关键部分的理论分析与计算,关键模块的设计思路 1、语言的录入及处理 在MATLAB软件平台下,利用函数wavread()对语音信号采集,并记录采样频率和采样点数。将语音信号转换成计算机能够运算的有限长序列。用FFT(傅里叶变换)对其作谱分析。对信号添加噪声,然后通过窗函数法设计滤波器滤掉该语音信号的噪声,对比滤波前后的语音波形和频谱。 2、时域信号的FFT分析 FFT即为快速傅氏变换,是离散傅氏变换的快速算法,它是根据离散傅氏变换的奇、偶、虚、实等特性,对离散傅立叶变换的算法进行改进获得的。在MATLAB 的信号处理工具箱中函数FFT和IFFT用于快速傅立叶变换和逆变换。函数FFT 用于序列快速傅立叶变换,其调用格式为y=fft(x),其中,x是序列,y是序列的FFT,x可以为一向量或矩阵,若x为一向量,y是x的FFT且和x相同长度;若x为一矩阵,则y是对矩阵的每一列向量进行FFT。如果x长度是2的幂次方,函数fft执行高速基-2FFT算法,否则fft执行一种混合基的离散傅立叶变换算法,计算速度较慢。函数FFT的另一种调用格式为y=fft(x,N),式中,x,y意义同前,N为正整数。函数执行N点的FFT,若x为向量且长度小于N,则函数将x补零至长度N;若向量x的长度大于N,则函数截短x使之长度为N;若x 为矩阵,按相同方法对x进行处理。 3、滤波方法 将信号中特定波段频率滤除的操作称为滤波,它是抑制和防止干扰的一项重要
交通信号控制机
三安久冠交通信号控制机 产品简介 JG-ZK3型交通信号控制机是在吸收国内外同类产品技术优势的基础上,结合我国城市道路现状,采用最新嵌入式技术和先进交通工程管理理念研制而成的新一代联网交通信号控制机。产品可以灵活构造多种控制模式,具有功能先进、可靠性高、用途多样化、维护管理方便、可扩容性等优点,特别适合我国中小城市交通路口使用。 该型交通信号控制机具有如下特点: 1. 采用最流行的32位嵌入式ARM处理器,处理能力强、功耗低、运行稳定; 2. 系统采用开源的嵌入式Linux操作系统,确保工作可靠稳定;软、硬件采用结构化、模块式设计,便于进一步升级和扩展; 3. 附带软件提供图形操作界面,方便直观便于使用,参数配置可通过计算机操作和远程操作; 4. 采用FPGA(大规模可编程逻辑门阵列)电路设计,显著地简化电路,减少故障点。 主要功能: 1. 符合国家道路交通信号控制机GA47-2002标准,通过公安部交通安全产品质量监督检测中心检测; 2. 主控板采用嵌入式ARM芯片、32MB内存和4G的电子硬盘; 3. 操作系统为实时多任务操作系统(ucLinux),确保工作可靠稳定和兼容性; 4. 附带软件提供图形操作界面,方便直观便于使用,参数配置可通过现场计算机操作或远程操作; 5. 48个输出端子(可扩展),每个端子负载3A/220VAC; 6. 提供标准、特I、特II三种相序表 7. 可设达20个时间段表和20个周日时段和20个特殊日时段表; 8. 标准时间方案16个,特I、特II、特Ⅲ、特Ⅳ时间方案各16个共80个; 9. 可任意设置信号相位,满足各种复杂的控制; 10. 具备灭灯、全红等特殊控制; 11. 标准相位和特殊相位可根据设置自动转换; 12. 提供灯泡检测功能和绿冲突检测功能; 13. 带有自适应控制功能(6个相位以内); 14. 多时段、无电缆和联机系统协调控制功能,方便构成城市交通控制系统; 15. 支持CTC-I通信协议,构成联网控制; 16. 有闪光和手动控制功能,以适应异常情况; 17. 可连接32个车辆检测器; 18. 提供一个RJ-45通信接口; 19. 机器自检信息和故障状态自动记录和存储功能; 20. 机柜结构预留空间,满足扩展需要。 技术指标 1. 输出端子: 48个 2. 接口板输入端子:32个
开关电源(Buck电路)的小信号模型及环路设计
开关电源(Buck电路)的小信号模型及环路设计 万山明,吴芳 (华中科技大学电气与电子工程学院,湖北武汉430074) 摘要:建立了Buck电路在连续电流模式下的小信号数学模型,并根据稳定性原则分析了电压模式和电流模式控制下的环路设计问题。 关键词:开关电源;小信号模型;电压模式控制;电流模式控制 0 引言 设计一个具有良好动态和静态性能的开关电源时,控制环路的设计是很重要的一个部分。而环路的设计与主电路的拓扑和参数有极大关系。为了进行稳定性分析,有必要建立开关电源完整的小信号数学模型。在频域模型下,波特图提供了一种简单方便的工程分析方法,可用来进行环路增益的计算和稳定性分析。由于开关电源本质上是一个非线性的控制对象,因此,用解析的办法建模只能近似建立其在稳态时的小信号扰动模型,而用该模型来解释大范围的扰动(例如启动过程和负载剧烈变化过程)并不完全准确。好在开关电源一般工作在稳态,实践表明,依据小信号扰动模型设计出的控制电路,配合软启动电路、限流电路、钳位电路和其他辅助部分后,完全能使开关电源的性能满足要求。开关电源一般采用Buck电路,工作在定频PWM控制方式,本文以此为基础进行分析。采用其他拓扑的开关电源分析方法类似。 1 Buck电路电感电流连续时的小信号模型 图1为典型的Buck电路,为了简化分析,假定功率开关管S和D1为理想开关,滤波电感L为理想电感(电阻为0),电路工作在连续电流模式(CCM)下。R e为滤波电容C的等效串联电阻,R o为负载电阻。各状态变量的正方向定义如图1中所示。 图1 典型Buck电路
S 导通时,对电感列状态方程有 O U Uin dt dil L -= ⑴ S 断开,D 1续流导通时,状态方程变为 O U dt dil L -= (2) 占空比为D 时,一个开关周期过程中,式(1)及式(2)分别持续了DT s 和(1-D )T s 的时间(T s 为开关周期),因此,一个周期内电感的平均状态方程为 ())()(O in O O in U DU U D U U D dt dil L -=--+-=1 稳态时,dt dil =0,则DU in =U o 。这说明稳态时输出电压是一个常数,其大小与占空比D 和输入电压U in 成 正比。 由于电路各状态变量总是围绕稳态值波动,因此,由式(3)得 L =(D +d )(U in +)-(U o +) (4) 式(4)由式(3)的稳态值加小信号波动值形成。上标为波浪符的量为波动量,d 为D 的波动量。式(4)减式(3)并略去了两个波动量的乘积项得 L =D +dU in - (5) 由图1,又有 i L =C + (6) U o =U c +R e C (7)
2参数的区间估计实验报告
参数的区间估计实验报告 姓名: 班级: 学号(后3位): 2016年12 月06 日00:00至24:00提交到邮箱:longsheng63@https://www.360docs.net/doc/3c5298575.html, 一.实验名称:参数的区间估计 二.实验性质:综合性实验 三.实验目的及要求: 1.了解【活动表】的编制方法; 2.掌握【单个正态总体均值Z 估计活动表】的使用方法. 3.掌握【单个正态总体均值t 估计活动表】的使用方法. 4.掌握【单个正态总体方差卡方估计活动表】的使用方法. 5.掌握【两个正态总体均值Z 估计活动表】的使用方法. 6.掌握【两个正态总体均值t 估计活动表】的使用方法. 7.掌握【两个正态总体方差卡方估计活动表】的使用方法. 8.掌握单个正态总体和两个正态总体参数的区间估计方法. 四.实验内容、实验操作关键步骤及实验主要结果 1.某厂生产的化纤强度2~(,0.85)X N μ,现抽取一个容量为25n =的样本,测定其强度,得样本均值 2.25x =,试求这批化纤平均强度的置信水平为0.95的置信区间. 实验操作关键步骤及实验主要结果 由于应选用样本函数 TINV 、SQRT 求μ的置信区间,所以,要选用【 单个正态总体均值t 估计活动表】,得到如下表的实验结果.因此,这批化纤平均强度的置信水平为0.95的置信区间为 (1.899137245,2.600862755) . 单个正态总体均值t 估计活动表 置信水平 0.95 样本容量 25 样本均值 2.25 样本标准差 0.85
标准误差 0.17 t 分位数(单) 1.71088208 t 分位数(双) 2.063898562 单侧置信下限 1.959150046 单侧置信上限 2.540849954 区间估计 估计下限 1.899137245 估计上限 2.600862755 2.已知某种材料的抗压强度2~(,)X N μσ,现随机抽取10个试件进行抗压试验,测得数据如下:482,493,457,471,510,446,435,418,394,469. (1)求平均抗压强度μ的置信水平为0.95的置信区间. (2)求2 σ的置信水平为0.95的置信区间. 实验操作关键步骤及实验主要结果 (1)由于应选用样本函数 TINV 、SQRT 求μ的置信区间,所以,要选用【 单个正态总体均值t 估计活动表】,得到如下表的实验结果.因此,平均抗压强度μ的置信水平为0.95的置信区间为 (432.3068626,482.6931374) . 单个正态总体均值t 估计活动表 抗压强度 抗压强度 482 置信水平 0.95 493 平均 457.5 样本容量 10 457 标准差 35.21757768 样本均值 457.5 471 方差 1240.27777 样本标准差 35.21757768 510 446 标准误差 11.13677591 435 t 分位数(单) 1.833112933 418 t 分位数(双) 2.262157163 394 469 单侧置信下限 437.085032 单侧置信上限 477.914968 区间估计 估计下限 432.3068626 估计上限 482.6931374