第三章 多自由度系统振动6.19
第三章 多自由度系统振动
多自由度系统和单自由度系统的振动特性是有区别的。单自由度系统受初始扰动后,按系统的固有频率作简谐振动。多自由度系统有多个固有频率,当系统按某一个固有频率作自由振动时,各独立坐标在振动过程中相互关系是固定的,这个关系叫振幅比,也叫作主振型或模态。主振型是多自由度系统以及弹性体振动的重要特征。
多自由度系统的振动方程是多个二阶微分方程组,这些方程一般是耦合的。多自由度振动的求解有两种方法:直接积分法和振型叠加法。直接积分法可直接根据微分方程求出响应,涉及的概念不多且有应用软件,本章不做介绍。振形叠加法要先求出系统的固有频率和振型,在此基础用叠加法求响应,物理概念清楚、并且是模态分析与参数识别的理论基础。因此本章将先用较多的篇幅介绍多自由度系统的固有振动特性、振型叠加法和传递函数。
3.1 振动微分方程
虽然一些多自由度系统数目较多,有些相当复杂,但建立多自由度系统振动微分方程并没有新理论和方法,都是动力学基本理论和方法,本节只通过例题介绍多自由度系统振动微分方程基本形式。
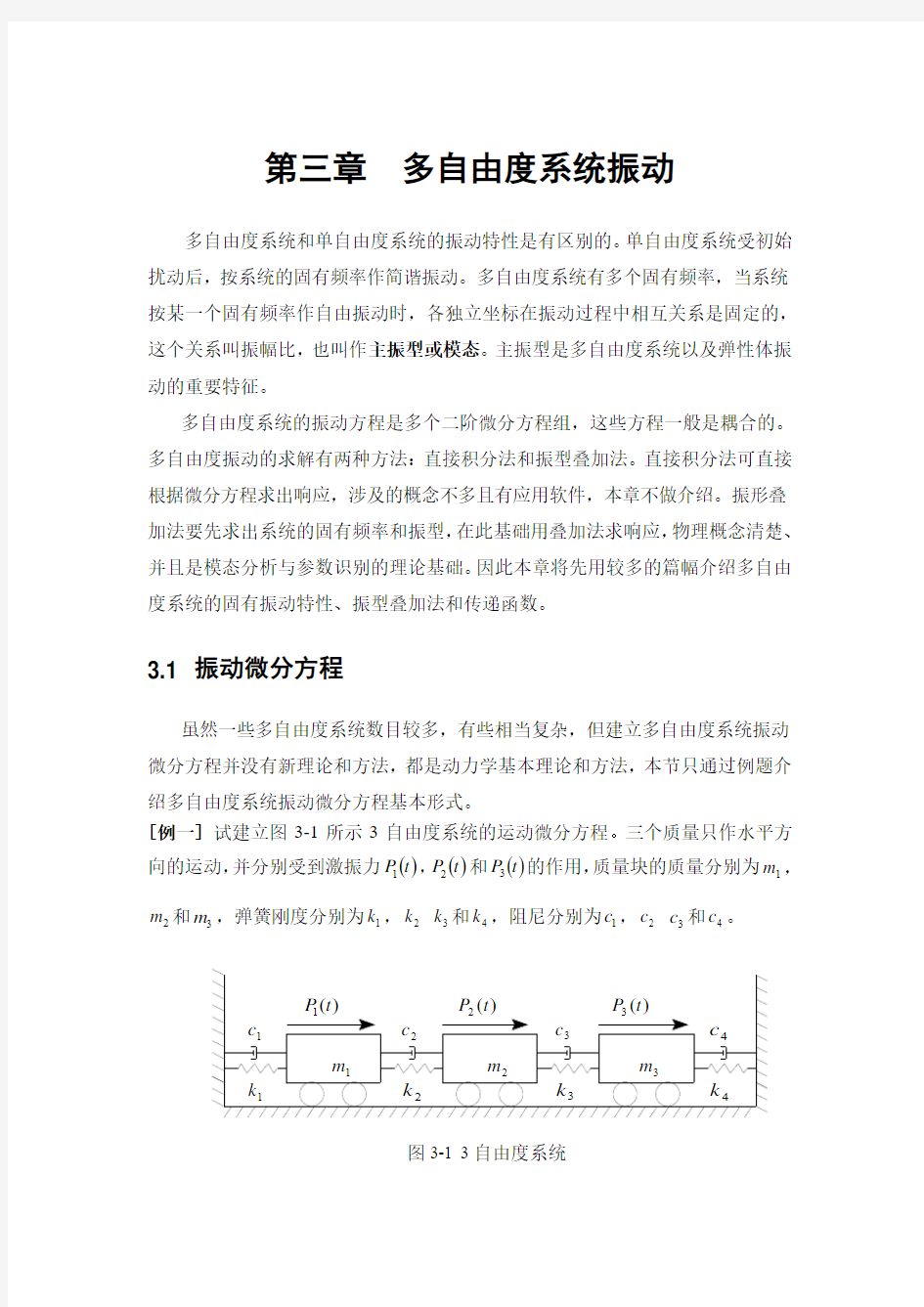
[例一] 试建立图3-1所示3自由度系统的运动微分方程。三个质量只作水平方
向的运动,并分别受到激振力()t P 1,()t P 2和()t P 3的作用,质量块的质量分别为1m ,2m 和3m ,弹簧刚度分别为1k ,2k 3k 和4k ,阻尼分别为1c ,2c 3c 和4c 。
图3-1 3自由度系统
)
(1t P 3
m )
(2t P 1
m 2
m )
(3t P 1
k 1
c 2
c 3
c 2k 3
k 4
k 4
c
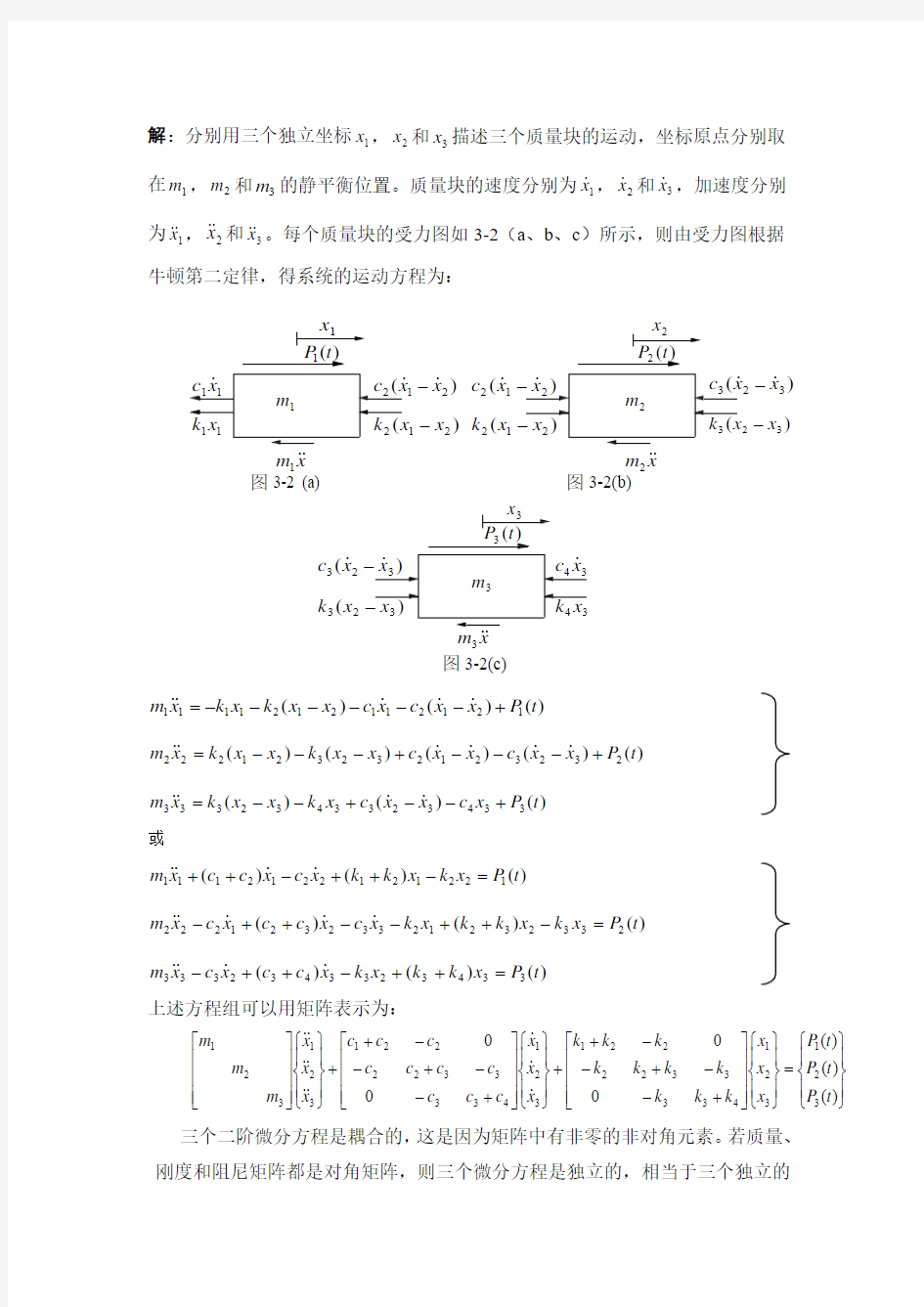
解:分别用三个独立坐标1x ,2x 和3x 描述三个质量块的运动,坐标原点分别取
在1m ,2m 和3m 的静平衡位置。质量块的速度分别为1x
,2x 和3x ,加速度分别为1x
,2x 和3x 。每个质量块的受力图如3-2(a 、b 、c )所示,则由受力图根据牛顿第二定律,得系统的运动方程为:
图3-2 (a) 图3-2(b)
图3-2(c)
)()()(1212112121111t P x x c x c x x k x k x
m +------= )()()()()(232321232321222t P x x c x x c x x k x x k x m +---+---= )()()(3343233432333t P x c x x c x k x x k x
m +--+--= 或
)()()(1221212212111t P x k x k k x c x c c x
m =-++-++ )()()(23323212332321222t P x k x k k x k x c x c c x c x m =-++--++- )()()(3343233432333t P x k k x k x c c x c x
m =++-++- 上述方程组可以用矩阵表示为:
??
????????=????????????????????+--+--++????????????????????+--+--++????????????????????)()()(000032132143333222213214333322221321321t P t P t P x x x k k k k k k k k k k x x x c c c c c c c c c c x x x m m m
三个二阶微分方程是耦合的,这是因为矩阵中有非零的非对角元素。若质量、
刚度和阻尼矩阵都是对角矩阵,则三个微分方程是独立的,相当于三个独立的
)(1t P 1
x 11x c 1
1x k )(212x x
c -)(212x x k -x m 1)
(2t P 2x )(323x x
c -)
(323x x k -x
m 2)
(212x x k -)
(3t P 34x c 3
4x k x
m 33x )(323x x c -)
(323x x k -1
m 3
m 2
m )(212x x c -
单自由度系统,其求解变为三个单自由度系统求解。
质量矩阵中出现耦合项称为惯性耦合,刚度矩阵中出现耦合项称为弹性耦合。此例中没有惯性耦合,因为质量矩是对角的。但一般情况下质量矩阵并不是对角的,所以一般情况下多自由度系统既有弹性耦合、也有惯性耦合。下面我们通过一个例子来说明质量矩阵不是对角的情况。 [例二] 写出图3-3所示系统振动微分方程
系统中均质刚性杆AB 的质量为m ,转动惯量为c J ,前后两端分别用刚度为
1k 和2k 的两个弹簧由承于地面上,杆全为长l 。
图3-3
若用杆两端的竖向位移1x 、2x 来描述刚杆的运动状态,则受力图如图3.4所示,
图3.4
显然、质心处的加速度为
()2
21x x +,根据牛顿第二定律,在竖直方向有:
221121)2
(
x k x k x
x m --=+ 杆的转动加速度为(顺时针为正)
()l
x x 21 -,对C 点应用动力矩定理:
1x 2
x A B
'A ,
B
C
1
1x k 2
2x k
2
2)(112221l x k l x k l x x J C -=-
整理并写成矩阵形式有:
???
???=?????????
?????-+??????????
?
?????0022222221
2121
21x x l k l k k k x x l J l J m m
C C
质量矩阵并不是对角的。当然,此例中若选质心的平动及绕质心的转动来描述运动,质量矩阵将是对角的。
一般地,对n 自由度系统,振动微分方程为:
??
?
???
?
???????=??????????????????????????+??????????????????????????+??????????????????????????432143212
1
222
21
1121143212
1
222
21
1121143212
1
2222111211...............................................................F F F F x x x x k k k k k k k k k x x x x
c c c c c c c c c x x x x
m m m m m m m m m nn n n n n nn n n n n nn n n n n 写成矩阵形式有:
[]{}[]{}[]{}{}F x K x C x
=++ M (3.1) 根据分析力学,具有定常约束的系统的动能T 与势能U 可写为下列二次型
{}[]{}x M x
T T 21=
{}[]{}x K x U T
2
1= (3.2) 对于稳定平衡的振动系统,系统的动能T 总是大于零的(除非系统是静止的),所以质量矩阵一般是正定的。同样,系统的势能U 也总大于零,所以刚度矩阵也是正定的。此外,系统的动能和势能不会因为表达形式不同而改变,对式(3.2)转置,比较可知,刚度矩阵和质量矩阵必须是对称矩阵,因而有:
[][]K K T = [][]M M T = (3.3)
3.2无阻尼自由振动
一、固有频率和振形
本节主要目的是通过无阻尼自由振动系统来介绍多自由系统的固有频率和振型,它们是多自由振动系统的重要特征。
在无阻尼情况下,系统的自由振动微分方程可以表达为:
[]{}[]{}0M =+x K x
(3.4) 在单自由度系统中,我们得到无阻尼自由振动解为正弦函数或余弦函数,不失一般性。对于多自由度系统振动解可设为:
{}{}t i e A x ω= (3.5)
列向量}{A 和ω均为待定复常数。若系统是振动的,则解ω必为实数。将式(3.5)代入(3.4),得到下列代数齐次方程组:
[][](){}02
=-A M K ω (3.6)
上面的方程组存在非零解{}A 的充分必要条件是系数行列式为零,即: [][]02=-M K ω (3.7) 式(3.7)为系统的特征方程,具体写出为:
2221111
121211222212122222222211
22
n n n n n n n n nn nn
k m k m k m k m k m k m k m k m k m ωωωωωωωωω---------=0 (3.8)
上式左端的行列式展开后是关于2ω的n 次代数多项式:
22(1)2(2)21210n n n n n b b b b ωωωω---+++?++= (3.9)
称为特征多项式,由式(3.8)或(3.9)可解出n 个2ω称为特征值或特征根,将其按升序排列为:
222
12n 0<≤≤≤ωωω…
显然特征值仅取决于系统本身的刚度和质量参数。这n 个特征值在大多数情况下互不相等且不为零,重根的零根说明系统有刚体运动。有零根和情况本书不再讨论,有兴趣的读者可参考相关的线性代数和振动理论书籍。
在求得特征值后.把某一个2
j ω代回式(3.6),可求对应的列向量}{j A 。由于式(3.6)的系数矩阵不满秩,在没有重根和零根情况下只有(n-1)个是独立的,故只能求出列向量}{j A 中各元素j a 1、j a 2、j a 3…nj a 的比例关系。
我们去掉其中不独立的某一式(例如最后一式),并将剩下的n-1个方程式中某一相同的项(如n A 项)移到等式右边,可得代数方程组:
()()()()()()()()()()()2222
11111121221,11,11,11222221
211222222,12,11,222221,1
1,111,21,221,11,1+++j j j j n j n n j n j n nj j j j j n j n n j n j n nj
n n j n j n j n n j n n n k m a k m a k m a k m a k m a k m a k m a k m a k
m a k m a k m a ωωωωωωωωωωω----------------+-+-=---+-+-=---+-+-…………
…()21,1,1,j n n j n n nj
k m a ω--=--
(3.10)
解上面的方程,可得到用nj a 表达的解1j a 、j a 2…j n a ,1-,显然都与nj a 的值成
比例。我们可将这些比例常数用121,,,...,j j n j φφφ-表示,并补充1nj φ=,可得列向量
{}{}12,,...,T
j
j
j nj φφ
φφ=,则有:
{}{}A j
nj
j
A φ= (3.11)
列向量{}j φ是确定的常数,反映列向量{}j A 中各数的比例关系,叫作特征向量。同比例放大或减小特征向量并不改变其比例关系,所以应用时常根据需要来放大或减小特征向量。不失一般性,我们可在式(3.11)中用待定复常数j r 取代
nj A ,式(3.11)可写为:
{}{}A j
j
j
r φ= (3.12)
这样,当{}
j φ成比例变化时,j r 有相应的变化,对应不同的特征值,可得到
不同的特征向量。对应于n 个特征值2j ω可得n 个特征向量{}1φ{}2φ…{}n φ ,且每一个特征向量都满足式(3.6)。
对于一个振动系统,特征值就是系统的固有频率,特征值相对应的特征向量就是系统的振形。显然,对应于n 个固有频率j ω可得n 个振形{}1φ{}2φ…{}n φ。
我们将在后面论述。
二、无阻尼自由振动的解
显然,将j ω及{}j A 代入式(3.5),可得n 组满足方程(3.4)的解,将这些解相
加,可得多自由度系统自由振动的一般解为:
{}{}∑==n
j t i j j j
e x 1
r ωφ (3.13)
其中2n 个待定常数j j j ib a r +=由系统运动的初始位移和初始速度确定。 如果系统在某一特殊的初始条件下,使得待定常数中只有k r ≠0,则式(3.13)所表示的系统运动方程只保留第k 项:
{}{}t
i k k k
e x ωφr =
(3.14)
参见前一章,多自由度系统振动一般解的方程可表达为:
????
???+=+=+=)sin(......)sin()sin(2211k k nk k n k k k k k k k k t r x t r x t r x ?ωφ?ωφ?ωφ (3.15)
这时整个系统按圆频率k ω、振幅比{
}k φ作同步简谐运动。振幅分别为{}k k φr ,振幅之间都保持固定不变的比值错误!未找到引用源。。因此特征向量
{}k φ完全确定了系统按固有频率k ω错误!未找到引用源。振动时的形态,所以
特征向量{
}k φ就是按相应固有频率振动时的振型向量,对应k ω错误!未找到引用源。的特征向量{
}k φ称为它的第k 阶主振型或主模态,相应的振动叫主振动。在振动过程中,一般还会产生其它阶主振动。
对于一个n 自由度系统,一般可以找到n 个固有频率,以及相应的n 个主振型。我们把各阶主振型组成的矩阵叫做振型矩阵:
[]{}{}{}[]n φφφφ...21= (3.16)
[例三]在图3-5所示的三自度系统中,设k k k 341==,k k k ==32,
m m m 231==,m m =2,求系统的固有频率、振型。
图3-5
解:分别用3个独立坐标1x 、2x 和3x 描述三个质量块的水平运动,可写出系统的质量矩阵[M ]和刚度矩阵[K ]。
[]m
m m
20
00002M =
;[]k
k
k k k
k k 40
20
4K ----= (1) 系统自由振动微分方程为:
+??
??????????????????32120000002x x x m m m 040
204321=??
???
???????????????----x x x k k
k k k k k
(2)
令
{}{}t i e A x ω= 代入上式整理可得特征值方程为:
2
2
2
42020
42k m k k
k m k k
k m ωωω-----=--
(3)
展开整理后,有:
222(2)(3)()0k m k m k m ωωω---=
(4)
可求得2ω的三个根为:
22212323,,k k k
m m m ωωω=
==
所以系统的固有频率分别为:
m k =
1ω s rad / m k 22=ωs rad / m k
33=ω
s rad /
不妨设j ω所对应的列向量为{}
j A
,且{j A }=?????
?????312111a a a
1
m 2
m 3
m 1
k 2
k 3
k 4
k 1
x 2x 3
x
那么解特征向量的代数方程为:
将21ω=m k /代人(上)式中①、②二式有,且21ω:对应的列向量为{1A }=???
?
??????312111a a a
021211=-a a 0131211=-+-a a a
解得:
2
,212131211a
a a a ==
}1,2,1{}{12T 1a A =
一阶振型,见图3.6(a )
T }1,2,1{}{1=φ
同理,将2
2ω=m k /2代人(上)式中第①、②式有:
022=-a 02321=--a a
解得:
0,222321=-=a a a
}1,0,1{}{212-=a A T
二阶振型,见图3.6(b )
T }1,0,1{}{2-=φ
②①③
)24(212=--j j ka a m k ω0
)2(3221=--+-j j j ka a m k ka ω0
)24(322=-+-j j a m k ka ω
将23
ω=m k /3代人(上)式中①、②二式有: 023231=--a a
0333231=---a a a
解得: 31322a a -=3133a a =
}1,2,1{}{31T 3-=a A
三阶振型,见图3.6(c )
T }1,2,1{}{3-=φ
其各阶阵形如图所示:
图3.6(a )
图3.6(b )
图3.6(c )
3.3振型的正交性
在前面我们分析了无阻尼系统自由振动的一般性质,指出一个n 自由度的系统具有n 个固有频率j ω及n 个主振型{}j φ (j=1,2,错误!未找到引用源。,n),本节主要讨论主振型之间关于质量矩阵和刚度矩阵的正交性。
1
2
1
1
2
-1
1
二阶振型
三阶振型一阶振型
1
-
设{}i φ、{}j φ分别是相应于固有频率i ω、j ω的主振型,由式(3.6)有:
}]{[}]{[2i i i φφωK =M (3.17)
同理可得:
}]{[}]{[2j j j K φφω=M (3.18)
将式(3.17)和式(3.18)分别左乘{}T j φ和{
}T
i φ得: }]{[}{}]{[}{2i i T j i T j φφφφωK =M (3.19) }]{[}{}]{[}{2j j T i j T i φφφφωK =M (3.20)
将式(3.19)转置,考虑到质量和刚度矩阵的对称性有:
}]{[}{}]{[}{2i j T i j T i φφφφωK =M (3.21)
将式(3.21)减去式(3.20)得:
0}]{[}){(2j 2i =M -j T i φφωω (3.22)
当i 不等于j 时,若无重根,0)(2j 2i ≠-ωω,则有:
0}]{[}{=M j T i φφ (i ≠j ) (3.23)
将式(3.23)回代到式 (3.20)得到:
0}]{[}{=K j T i φφ (i ≠j ) (3.24)
上两式(3.23)、式(3.24)表示固有频率不相等的两个振型之间,存在着对质量矩阵][M 和和刚度矩阵][K 的正交性。
当i 等于j 时,可记为:
i i T i M =M }]{[}{φφ (3.25) i i T i K =K }]{[}{φφ (3.26)
i M 和i K 分别叫作第i 阶振动的主质量和主刚度,都是正实数,显然:
i
i
M K =2i ω (3.27)
推广到整个振型矩阵有:
[]M =M }]{[}{φφT []K =K }]{[}{φφT
错误!未找到引用源。 (3.28)
其中[]M 为对角阵,称为主质量矩阵,即:
[]????
?????
???=M 43210
00000
000M M M M (3.29)
[]K 也是对角阵,称为主刚度矩阵,即:
[]????
?????
???=K 43210
00000
000K K K K (3.30)
在近似计算或实验分析时,给出相应的振型函数后,就可得到系统固有频率的近似值,其精度与振型函数的选取有关。
如果主质量为1,则主刚度就是固有频率的平方(式3.27),使表达式更简洁。使主质量等于1的振型叫正则振型。由于主振型列阵只表示系统作主振动时各幅值的比例关系,同除主质量平方根并不影响这个比例关系。各主振型正则化的过程就是求出主振型后,再求出主质量,然后将主振型除以主质量的平方根。
若记}{i φ为正则振型,要使主质量为1,只需令i
i i M =}{}{φφ。显然,振形正
则化后的主质量矩阵是单位矩阵。
【例四】求例三所示系统的主刚度矩阵、主质量矩阵、正则振型矩阵以及振形正则化后的主刚度矩阵、主质量矩阵。
解:例三中已得出质量矩阵、刚度矩阵和各阶振型,振形矩阵为:
111202111φ-??
??=-??
????
从而主质量矩阵
[]1212m 001112001010m 02024010121002111002T
M M m m φφ-??????????????????????==--=??????????????????????-????????
主刚度矩阵
[]121401*********k 20280101210
4111003T
k k K k k k k
k φφ--????????
?????????????K?==----=??????????????
????????--????????
由i
i i M =
}{}{φφ可得各正则振型列阵如下
11112{}228411m m
φ????
????
==????????????
211{}021m φ-????
=??
????
31112{}228411m m
φ????
????
=-=-????????????
于是得正则振型矩阵
12122
024121m φ??
-?
???=-???????
?
主刚度矩阵
[]1
21401212220222
024412104121100020003T
K k k
k k k m m k
k k m φφ?????K?=??????
????
--??
?
?????=----???????
?????--??????
????=??????
3.4振型的叠加法
在无阻尼自由振动中,我们得到:
{}{}∑==n
j t
i j j j
e x 1
r ωφ
(3.31)
从式中看出,每一个独立坐标的振动量是各阶振型的叠加,这启发我们用各阶主振动来描述系统的振动,这种方法叫振型叠加法。振型叠加法求解多自由度系统就是将按独立坐标振动的问题转变为按主振型振动的问题。
用独立坐标j x (n j ...3.2.1=)来描述多自由度系统的一般振动微分方程为:
}{}]{[}]{[}]{[F x K x C x
M =++ {}T n F F F ...}{1= (3.32) 在求得系统主振型后,设描述各阶主振型的振动量的独立坐标为
)(t q j )...,3,2,1(n j =,则各独立坐标的振动是各主阶振动量的叠加,可设:
{}{}[]{}q t q x n
j j φφ==∑=j 1
)(
(3.33)
错误!未找到引用源。)(t q j 为按第j 主振型振动的坐标,叫作主坐标。在数学上,这相当于做了一个变换。经过这个变换后,相应的初始条件为:
错误!未找到引用源。 {}[]{})0()0(q x φ= (3.34)
错误!未找到引用源。 {}[]{})0()0(q x
φ= (3.35) 将其式(3.33)代入式(3.32),并前乘振型矩阵的转置{}T
φ得:错误!未找到引
用源。 错误!未找到引用源。
[][][]{}[][][]{}[][][]{}[]{}F q k q C q
M T T T T φφφφφφφ=++ (3.36) 将式(3.25),(3.26)代入上式(3.31),并记,
{}[]{}F F T
φ= (3.37a)
[]{}[]{}φφC C T
= (3.37b)
可得:
[]{}[]{}[]{}{}F q K q C q
M =++ (3.38) 虽然主质量矩阵[]M 与主刚度矩阵错误!未找到引用源。是对角阵,矩阵[]C 一般并非对角阵,所以式(3.38) 是一组通过速度项相互耦合的微分方程。如果[]C 也是一个对角矩阵,则式(3.38)是不耦合的,是n 个独立的二阶微分方程,相当于n 个单自由度系统,使求解大为简化。
当阻尼较小,略去[]C 的非对角线元素组成的各阻尼项,即令[]C 的非对角线元素的值为零可使方程解耦;另外一种方法是假设阻尼矩阵[]C 是质量矩阵[]M 和刚度矩阵[]K 的线性组合的情况,使阻尼矩阵[]C 对角化。
即:
错误!未找到引用源。 [][][]K M C βα+=
(3.39)
解耦后式(3.38)为:
错误!未找到引用源。 []{}[]{}[]{}[]j j j J j j F q K q C q
M =++ )...,3,2,1(n j = (3.40)
转化为n 个单自由度系统,可根据初始条件求解,得j q )...,3,2,1(n j =。 最后,将方程错误!未找到引用源。代入坐标变换式(3.33),即可得到广义坐标下的响应,即
{}()
1{}n
j j j x q t ?==∑
)...,3,2,1(n j = (3.41)
对于大阻尼情况,引入复模态理论可使方程解耦,本书不做讨论。 [例五]:用振型叠加法求解上例题[例三]初始速度及初始位移为
{}{}T
T
x
x 000,022== 下系统的响应。 解:由上例可知:
无阻尼自由振动微分方程为:
[]{}[]{}{}0=+x k x
m (1)
振型函数为:
[]????
?
?????--=111202111φ (2)
主质量矩阵:
(3)
主刚度矩阵:
(4)
将{}[])}({t q x φ=代入(1),并左乘[]T
φ可知:错误!未找到引用源。
{}030001000182000100024321321=??
???
???????????????+????????????????????q q q k q q q m (5) 展开得到:
1122338804808240mq kq mq kq mq kq +=?
?
+=??+=? (6)
解(6)式得到:
t A t A q 12111sin cos ωω+= t B t B q 22212sin cos ωω+= t C t C q 32313sin cos ωω+= (7)
其中:m
k m k
m k
3,2,321===
ωωω [][][][]??
??
??????=??????????--????????????????????--==200010002411120211120000002121101121m m m m M M T φφ[][][][]??
??
?
?????=??????????--???????
???----??????????--==30001000181112021114020412110112
1k k k
k k k k k K K T φφ①
②
③
根据初始条件{}[]{})0()0(q x φ=,{}{}T
T
x
x 000,022== ,由{}[])}({t q x φ=可知,主坐标就满足的初始条件[]{}x t q 1)(-=φ,[]{}x t q
1)(-=φ。对振形矩阵求逆得:
[]111112024111φ-??
??=-????-??
从而{}[]12111211(0)2202214011100q φ-????????
????????==-=????????????????-????????
, {}[]10111001(0)0202004011100q φ-????????
????????==-=????????????????-????????
对①式进行求导得到:
t A t A q
1211111sin sin ωωωω+-= 将初始条件0,111==q
q ,代入式①和⑤,得到待定系数21A A 和的解: 0121==A A ,
同理,得到:0121==B B ,0121==C C , 代入式①②③,得到:
代入{}[]
)}({t q x φ=中,得到: ⑥
⑧
33cos
k q t m
=22cos
k q t m =1cos k
q t m =⑤
{}11232133123111cos cos cos cos 202cos 2cos 2cos 111cos cos cos cos t t t t x t t t t t t t ωωωωωωωωωωω++??????
??????=-=-?
???????????--+?????
? 3.5多自由度传递函数
多自由度振动微分方程为:
错误!未找到引用源。 []{}[]{}[]{}{}F x K x C x M =++
(3.42)
这是多输入多输出问题,按传递函数的定义,每一个输入对每一个输出都有一个传递关系,若输入i t j F e ω=,其余均为零,则可得j 点输入时对各输出点的传递函数
{}12(),(),...
()j
j nj H
H H ωωω,对全部输入可得传递函数矩阵
[]?
?
???
???????=nn n n n n H H H H H H H H H H (2)
1
22221
112
11 (3.43) 事实上对于复数形式激励错误!未找到引用源。{}{}t i e P F ω0=,设系统的稳态响应的复数形式{}{}t i e B x ω=错误!未找到引用源。 ,代入微分方程 (3.42)得:
{}[][][]
[]{}020
)(P H C i M K P B ωωω=+-=
(3.44)
其中,错误!未找到引用源。()ωH 为传递函数,
nn
nn nn n n n n n n n n n n c i m k c i m k c i m k c i m k c i m k c i m k c i m k c i m k c i m k H
ωωωωωωωωωωωωωωωωωω+-+-+-+-+-+-+-+-+-=
-22
222
11
11212222222222221212211121121221211
112111
......
......
...
......
(3.45)
显然,由于系统参数是对称矩阵,传递函数矩阵也是对称的。
若输入j F 为单位脉冲,其余均为零,则可得j 点输入时对各输出点的单位脉
冲响应
{}12(),(),...
()j
j nj h
t h t h t ,对全部单位脉冲激励可得单位脉冲响应矩阵
[]111212122
212
.....................n n n n nn h h h h h h h h h h ??????=??
?
???
(3.46)错误!未找到引用源。
利用上式作傅氏变换,可得到传递函数矩阵。
为了更好的分析传递函数的性质,设{}[]{}q x φ=,代入式(3.38)解耦后得到:
[]{}[]{}[]{}[]{}F q K q C q M T
φ=++ (3.47)错误!未
找到引用源。
当激励为{}F 时,主坐标{}q 的稳态响应解为:
{}{}t i e D q ω= (3.48)
激励错误!未找到引用源。{}{}0
i t
F P e ω=,代入上式(3.28)得到: {}[]{}
02
(T
P D K M i C φωω=
??????-+??????
(3.49)
激励{}F 对主坐标{}q 的传递函数)(ωqf H 为:
[]2111
2222
2
10
...
1
0...0............
100
...T qf n n n k m i c
k m i c H k m i c ωωωωφωω?
???-+???
?
??-+??=???
?????
????-+?
?
(3.50)
若变换中振型矩阵式为正则振型矩阵,则上式为:
22111
22222
22
10
...
21
0...02............
100
...2T qf n n n i i H i ωωωζω
ωωωζωφωωωζω?
???-+???
?
????-+??=?????
?????
????-+?
? (3.51)
1121
1
2222
2211111111112222
2
22222222222222122222
22,,...,222...222............
...
222n n n n nn
n n n n n n
n n n i i i i i i i i i φφφωωωζωωωωζωωωωζωφφφωωωζωωωωζωωωωζωφφφωωωζωωωωζωωωωζω????-+-+-+??
????
=-+-+-+??????????
-+-+-+??
因为{}[]{}x q φ=,所以
[]qf H H φ???
?=???? 1121
1
2222
221
11111
1111112
112222
2122
22222
2222222222212
122,,...,222.........222........................
...
2n n n n n n nn n n i i i i i i i φφφωωωζωωωωζωωωωζωφφφφφφφφφωωωζωωωωζωωωωζωφφφφωωωζ-+-+-+???
???=-+-+-+????????-+222
22...
22n nn
n n n n n
n n n i i φφωωωωζωωωωζω??????
????
??????????
-+-+??
代入得每一项
22
12n
ks js
kj s s s s
h i φφωωωζω=?=-+∑
(3.51) kj h 下标表示第j 点激励,第k 点响应之间的传递关系。显然,jk kj h h =,传递函数矩阵是对称的,kj h 是n 项多项式的和,其中每一项相都当于一个单自由度系统的传递函数。上式分离后可得实频和虚频关系Re()kj h 和Im()kj h ,从而其幅频和相频分别如下:
幅值:22Re()Im()kj kj A h h =+ (3.52)
多自由度系统振动分析典型教案
第2章多自由度系统的振动 基本要点: ①建立系统微分方程的几种方法; ②固有频率、固有振型的概念以及固有振型关于质量和刚度矩阵的加权正交性; ③多自由度系统运动的解耦—模态坐标变换及运用模态叠加法求解振动系统的响应。 引言 多自由度振动系统的几个工程实例;多自由度系统振动分析的特点;多自由度系统振动分析与单自由度系统的区别与联系。 §2.1多自由度系统的振动方程 ●方程的一般形式:质量矩阵、阻尼矩阵、刚度矩阵和激振力 §2.2建立系统微分方程的方法 ●影响系数:刚度影响系数、柔度影响系数 ●刚度矩阵法、柔度矩阵法及这两种方法的特点;Lagrange方程法 §2.3无阻尼系统的自由振动 ●二自由度系统的固有振动:固有频率、固有振型。 ●二自由度系统的自由振动 ●二自由度系统的运动耦合与解耦 弹性耦合,惯性耦合; 振动系统的耦合取决于坐标系的选择; ●多自由度系统的固有振动 固有振动的形式及条件:特征值、特征向量、模态质量、模态刚度; 固有振型的性质:关于质量矩阵和刚度矩阵的加权正交性; 刚体模态; ●运动的解耦:模态坐标变换(主坐标变换)。 ●多自由度系统的自由振动 §2.4无阻尼系统的受迫振动 ●频域分析:动刚度矩阵和频响函数矩阵,频响函数矩阵的振型展开式,系统反 共振问题。 ●时域分析:单位脉冲响应矩阵,任意激励下的响应,模态截断问题,模态加速 度法。 §2.5比例阻尼系统的振动 ●多自由度系统的阻尼:Rayleigh比例阻尼。 ●自由振动 ●受迫振动:频响函数矩阵,单位脉冲响应矩阵,任意激励下的响应。 §2.6一般粘性阻尼系统的振动
●自由振动:物理空间描述,状态空间描述。 ●受迫振动:脉冲响应矩阵,频响函数矩阵,任意激励下的响应。 思考题: ①刚度矩阵和柔度矩阵在什么条件下是互逆的两个矩阵?从物理上和数学两方面加以解 释? ②为什么说模态质量、模态刚度的数值大小没有直接意义? ③证明固有振型关于质量矩阵和刚度矩阵的加权正交性,并讨论其物理意义。 ④在实际的多自由度系统振动分析中,为什么要进行模态截断? 参考书目 1.胡海岩,机械振动与冲击,航空工业出版社,2002 2.故海岩,机械振动基础,北京航空航天大学出版社,2005 3.季文美,机械振动,科学出版社,1985。(图书馆索引号:TH113.1/1010) 4.郑兆昌主编, 机械振动上册,机械工业出版社,1980。(图书馆索引号: TH113.1/1003-A) 5.Singiresu S R, Mechanical vibrations,Longman Prentice Hall, 2004(图书馆索引 号:TH113.1/WR32)
第4章多自由度系统的振动题解
习 题 4-1 在题3-10中,设m 1=m 2=m ,l 1=l 2=l ,k 1=k 2=0,求系统的固有频率和主振型。 解:由题3-10的结果 22121111)(l g m l g m m k k +++ =,2 221l g m k -=,2212l g m k - =,2 2222l g m k k += 代入m m m ==21,021==k k ,l l l ==21 可求出刚度矩阵K 和质量矩阵M ??? ???=m m M 00;?? ?? ??????- - =l mg l mg l mg l mg K 3 由频率方程02=-M p K ,得 0322 =????? ??? ? ?-- - -=mp l mg l mg l mg mp l mg B 0242 2 2224 2 =+-∴l g m p l g m p m l g p ) 22(1-=∴ ,l g p )22(2+= 为求系统主振型,先求出adjB 的第一列 ???? ? ? ?? ??-=l mg mp l mg adjB 2 分别将频率值21p p 和代入,得系统的主振型矩阵为 ??????-=112) 1(A ?? ????+=112)2(A 题4-1图
4-2 题4-2图所示的均匀刚性杆质量为m 1,求系统的频率方程。 解:设杆的转角θ和物块位移x 为广义坐标。利用刚度影响系数法求刚度矩阵k 。 设0,1==x θ,画出受力图,并施加物体力偶与力 2111,k k ,由平衡条件得到, 222111a k b k k +=, a k k 221-= 设1,0==x θ,画出受力图,并施加物体力偶与力2212,k k ,由平衡条件得到, 12k a k 2-=, a k k 222= 得作用力方程为 ?? ? ???=??????????? ?--++????????????? ?00003122222 2122 1x a k a k a k a k b k x m a m θθ 由频率方程02=-M K p ,得 031 2 22222 212221=----+p m a k a k a k p a m a k b k 4-3 题4-3图所示的系统中,两根长度为l 的均匀刚性杆的质量为m 1及m 2,求系统的刚度矩阵和柔度矩阵,并求出当m 1=m 2=m 和 k 1=k 2=k 时系统的固有频率。 解:如图取21,θθ为广义坐标,分别画受力图。由动量矩定理得到, l l k l l k I 4 34343432 11111θθθ+-= 2 2434343432 2211122l l k l l k l l k I θθθθ--= 题4-3图 题4-2图
07210第四章--多自由度系统振动(讲1)
第3次作业题: 1、如图所示起重机小车,其质量为m 1=2220kg,在质心A 处用绳悬挂一重物B ,其质量为m 2=2040kg 。绳长l=14m,左侧弹簧是缓冲器,刚度系数k=852.6kN/m 。设绳和弹簧质量均忽略不计,当车连同重物B 以匀速v 0=1m/s 碰上缓冲器后,求小车和重物的运动。 2、两个质量块m 1和m 2用一弹簧k 相连,m 1的上端用绳子拴住,放在一个与水平面成а角的光滑斜面上,如习题下图所示。若t=0时突然割断绳子,两质量块将沿斜面下滑。试求瞬时t 两质量块的位置。 答案: α ωsin ]) (cos 2)([21222 221221g m m k t m t m m k m x +-++= αωsin ]) (cos 2)([21222 221222g m m k t m t m m k m x ++++= 3.如图,已知m 2=2×m 1=m ,k 3=2k 1=2k 2=2k ,x 10=1.2,x 20=10x =20x =0,试求系统的固有频率,主振型以及相应。 答案:利用程序,易得 固有频率: ωn 1=3.162277rad/s ,ωn 2=5 rad/s 主振型: m 1 m 2 k 3 k 2 k 1
系统相应: t x 5cos 8.03.1622777t cos 4.01+= t x 5cos 4.03.1622777t cos 4.02-= 4.已知:?? ? ???=11009][m ,[c ]= ??????--11.01.01,][k =??????--905050110,)}({t f =? ?? ???21,激振力频率 ω=3rad/s,试求系统的稳态响应。 答案:利用给定程序,输入给定数据,即获得系统的稳态响应。 第四章 多自由度系统振动 §4-1 多自由度系统运动方程的建立 (引言:问题的提出。)工程中的机械振动问题,有一些可以简化成一个或两个自由度系统的振动问题,因此可以用前面几章中介绍的方法进行分析计算。但是也有很多问题不能采用这种过于简化的力学模型来进行分析。一般来说,各种机器及其零部件的质量和刚度都具有分布的性质,因此理论上都是无限多自由度系统,即为弹性体。但由于机器的结构比较复杂,若都按无限多自由度来处理,在数学上有很大的,甚至目前还无法解决的困难。因此,只好将系统的结构用一些离散的结构来理想化。这样就把弹性体变成数目有限个的离散单元组成的有限多自由度系统。 如前所述,振动系统有多少个自由度就有多少个固有频率和主振型,也就有多少阶主振动,因此弹性体就有无穷多阶主振动。但有意