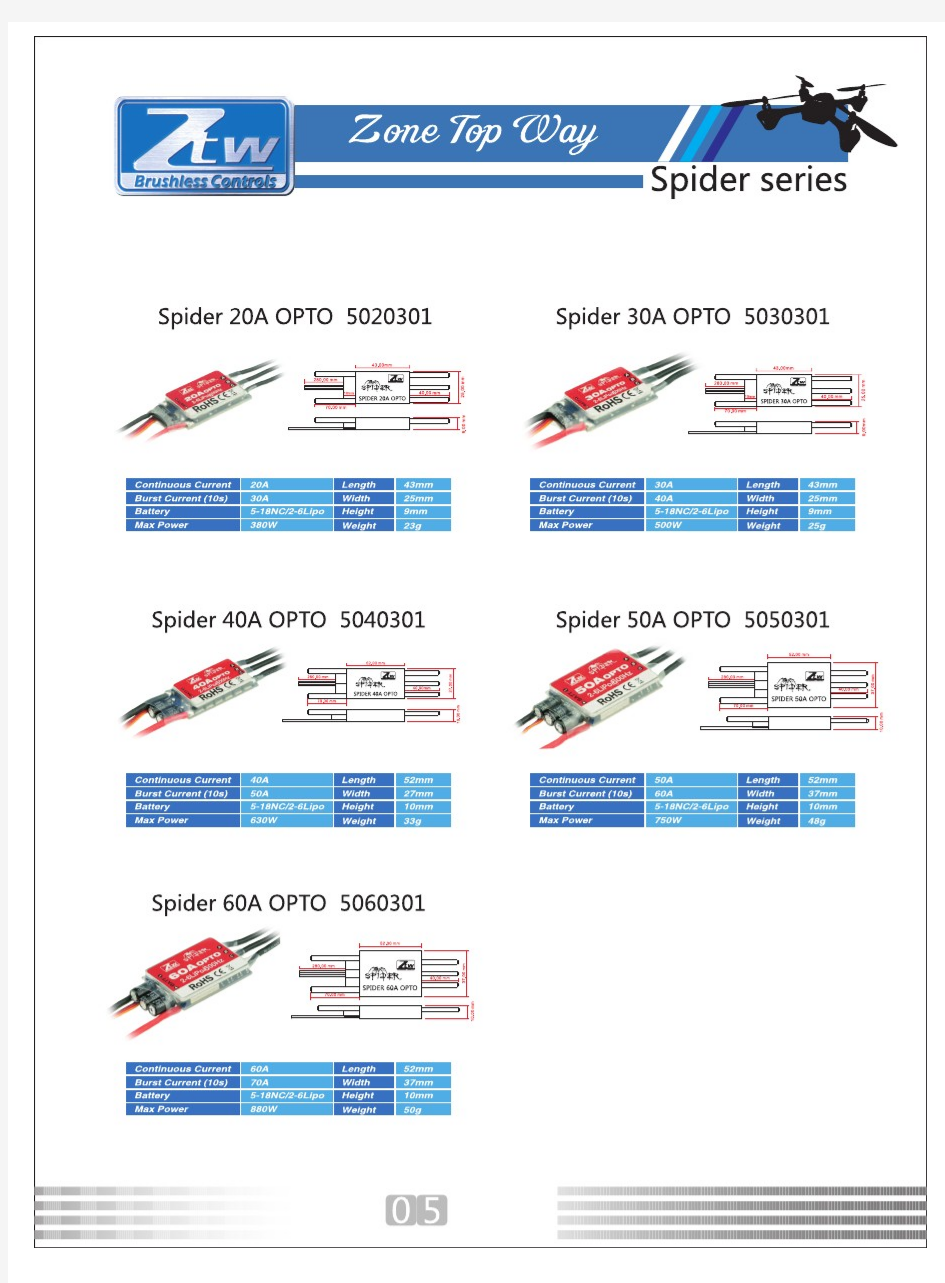
中特威最新多轴电调系列,“蜘蛛”(Spider)系列多轴电调

电调设定简法
电调设定简法 一、功能说明 1、油门中点自动识别; 2、刹车自动调节; 3、可以设置的参数有7个:进角、电池保护电压阀值、起动力、中点范围、运行模式、后退力、静止拖动力; 5、支持单方向和双向运行。单方向运行时,油门正向可以使电机从零速到最高速运行,油门反向刹车,不能反向运行。 双向运行分两种:双向带刹车、直接正反向运行。 双向带刹车时,油门正向可以使电机从零速到最高速运行,而正向运行时,油门切换到反向,电机刹车,直到停止,在油门没回归零(回
到中位点)前,保持刹车,油门归零后0.5S,电机可以反转倒车,反转运行时任何时候油门推到正向运行,则电机会马上正向运行。 直接正反向运行提供一次刹车,当油门归零后,无需等待,再推反向油门则立即反向运行。 二、参数设置说明 1、参数说明: 可以设置的参数有7个,这7个参数分别是: ◆进角; ◆电池保护电源阀值:统一按照锂电池处理,不增加额外的电池类型参数; ◆起动力:起动电机的最小油门大小,起动最大油门由软件自动限制; ◆中点范围:用于调整油门空行程的长短,范围越宽,油门空行程越大;
◆运行模式:单向、双向带刹车、直接正反向运行选择; ◆后退力:用于双向运行倒车时最大倒车速度的限制; ◆静止拖动力:用于静止带刹车的力道设置,最小可以为0。 2、设置说明 以遥控器为例,按照步骤解释如下: A、先接好遥控器接收机信号线,电调接好电池电源,遥控器油门推到正向运行最大值。 B、开电调开关,等待2秒左右,听到“BBBBBB”,表明电调已经捕捉到正向最大油门;2.5秒内将油门松开,油门回到中位点,听到“BB -BB”,表明电调已经捕捉到中位点;2.5秒内,将油门推到反向运行的最大值,听到“BB-BB”,表明电调捕捉到反向运行最大值;然后松开油门使其回到中位点,等待2.5S后进入参数设置状态。 C、每个参数设置采用“询问-应答”方式,电调会给出每个参数的参数项给用户选择,每个参数项给出后,用户如果选择此项,就把油门推到正向最大值,电调确认后,会给出确认提示,并跳到下个参数;
四轴PID调试心得
本人曾在大二,大三参加过第六,第七届飞思卡尔智能车比赛,之后在考研过后在飞思卡尔智能车为我打下的良好基础下开始制作四轴飞行器。在年中到现在陆续调试了两架四轴,一架十字,一架X。其中四轴的平衡是很重要的一环,其中涉及到的PID整定,因为听闻今年摄像头也要站起来了,个人认为PID整定过程都有可以互相借鉴之处,顾在此一贴,也顺便为我的ARM-ST校园比赛求支持。 PID调试心得 本人不是自动化出身,也没有受过专业训练,都是自己摸索,在这里浅述一下自己的PID参数整定心得。所言之物皆由实践及自己的理解得出,如有不当之处还请指正。 首先例举第一个例子,我调的第一台四轴飞行器,十字型四轴飞行器,讲下配置:网上一百多的650机架,好赢20A电调,新西达2212 1000kV,1045的桨,2200mah 电池。 采用位置式PID控制,位置式PID公式如下 PID的基本意义我在次就不作阐述了,我只讲我的设计,我以姿态角作为被控制对象,所以 e(k) = 期望-测量 = 给定值-测量姿态角 对于微分项D,我做了一点改变,标准PID的微分项D=kd*(e(k)-e(k-1)),我在实践过程中因为角度的微分就是角速度,而陀螺仪可以直接测出角速度,所以我没有将微分项作为偏差的差而是直接用D=kd*Gyro 实现代码如下 float pidUpdate(pidsuite* pid, const float measured,float expect,float
gyro) { float output; static float lastoutput=0; pid->desired=expect; //获取期望角度 pid->error = pid->desired - measured; //偏差:期望-测量值 pid->integ += pid->error * IMU_UPDATE_DT; //偏差积分 if (pid->integ > pid->iLimit) //作积分限制 { pid->integ = pid->iLimit; } else if (pid->integ < -pid->iLimit) { pid->integ = -pid->iLimit; } // pid->deriv = (pid->error - pid->prevError) / IMU_UPDATE_DT; //微分应该可用陀螺仪角速度代替 pid->deriv = -gyro; if(fabs(pid->error)>Piddeadband) //pid 死区 { pid->outP = pid->kp * pid->error; //方便独立观察 pid->outI = pid->ki * pid->integ; pid->outD = pid->kd * pid->deriv; output = (pid->kp * pid->error) + (pid->ki * pid->integ) + (pid->kd * pid->deriv); } else { output=lastoutput; } pid->prevError = pid->error; //更新前一次偏差 lastoutput=output;
电调操作说明
ICE系列ESC操作说明 技术参数 (ICE 45A- 150A)2-6S LiPo,6-18 NiMH (ICE HV60A,HV100A)4-12s LiPo, 12-36 NiMH (ICE HV120,HV180HV) 4-14s LiPo,5-15s(LiFePO4),12-42 NiMH, - SBEC :5.5V,6A(高压系列无BEC输出) - 低电压保护 - 光电耦合器 - 定速模式 - 软启动 - 激活惯性滑行(自动旋转), - 自动进角或者六段进角调节 - 持续可调整的F3A的刹车 - 3段可调节的电动势刹车 - 切换频率:8 to 16 kHz - 速度限制:240,000转(2极马达) - 温度和超载警告 - 消火花电路(防打火设计) - 可用于飞机与直升机 - 可用编程卡编程 初始化 接通电源打开遥控器时你将听到三声降调。然后是与之电池数量相关的蜂鸣声(4S时连续快速响4声,5S 与6S以此类推)。当连接7至14s的电池会产生两声高音两声低音;之后将会产生三声升调,这时ESC可以开始工作。 如果马达转动方向错误,请仅交换马达三根线的任意两根电线。 速度控制器有固定的油门曲线设置,这样确保所有的遥控器的停止点和全油门点是成线性连接。所有可编程遥控器,油门范围应设置为默认(± 100%),中心点设置为零和油门微调启用。然而,有些类型的遥控器油门范围需要进行校正。关于油门行程一定要设置2个末端点位,一个点位是油门杆在最低的位置时马达是停止的,还有一个点位置是全油门时马达是全功率的,LED指示灯熄灭表示全油门了。 在出厂时进角调节为18°,中等刹车,并且低电压保护值为3.1V的锂电池模式。如果在加速时出现了叫声或其他的不正常声音,那么进角要加大。如果进角增加到30°还不能改善,那么你的马达将是超负荷的,,此时使用一个较小的螺旋桨或降低电压,或更换一个性能更好的马达。如果当马达停止工作时你听到两声重复的蜂鸣声,表示电池的电压已低于设定值。可以调节每节电池的截止电压为2.9V或3.0V。如果还不能改善,那么可能是电池没电了或放电量不足。也可能是线太长了,太细了,或是连接器出故障了。 在刹车与马达启动点之间,油门遥杆要有小范围的摆动空间。你可以通过延伸这个油门遥杆点位置2个刻度凹痕或者向高处微调但是不足以加油启动。 如果没有设置成自动进角,可参照以下指南设置。 内转子 0 到12° 外转子 18 到30°
1天地飞遥控器支持国货性价比又高推荐我用的是天72电机XXD新西达或朗宇2212 KV1400KV
1.天地飞遥控器(支持国货,性价比又高,推荐。我用的是天7) 2.电机(XXD新西达或朗宇)2212 KV1400、KV2200、 KV2450均可(建议朗宇2212 KV1400,配皓业8060桨,动力足,速度慢,省电,这桨还便宜) 3.电池3S 1300mah、1500mah(建议格氏3S 1300mah电池,最好不用2200mah的,重了) 4.简易平衡充或B6 5.电调中特威30A或天行者40A或飞腾30A 6.舵机2个(银燕或辉胜) 7.舵角2套、魔术贴、电机木片座、热熔胶、碳杆、1mm钢丝等(我就不一一列举了、看图就知道了) 以上东西复制粘贴去淘宝买吧!!!买哪种看自己的预算去广告店打写真(图纸:帖子最后面有下 载,拷贝到U盘拿到打印店去,给店主说打翼展为72cm,他就会弄了),我们本地价格13元1平方,建议打翼展为70-75cm(电调、舵机的线只有那么短点),打印大了,也许就要用到延长线。一般写真打好也就15元。5mmKT板需要1平方多点(我们的KT 板是成批买的,单架飞机的KT板也就5元左右),告诉你价格,不用担心被宰。(写真背面有层膜,撕掉后可以粘贴在5MMKT板
上。亲,这个你知道吗) 以天地飞7通遥控器为例: MENU,高级设置,三角翼混控,混控(开),++--之类的自己调了试(数字大小新手不用调整),以达到以下效果(同一舵机有2个名字,一个舵机(插了1通道)的名字是:副翼1和升降2 那另外个舵机(插了2通道)名字就是:升降1和副翼2): 上面带下划线的字如果你看不明白,没关系。你就乱调整 ++--,以达到下面这效果就行了: 从屁股后面看 1.升降杆一拉,两个舵面都向上(飞行时尾向下受力,飞机向上飞) 2.升降杆一推,两个舵面都向下(飞行时尾向上受力,飞机向下飞) 3.副翼杆往左,左舵面向上,右舵面向下(飞机往左边倾斜,飞机左转弯) 4.副翼杆往右,左舵面向下,右舵面向上(飞机往右边倾斜,飞机右转弯) 解释:飞机在天上飞行时可以不需要方向舵的(玩模拟器就可看到),只需要副翼(飞机倾斜,再拉点升降,自然就转弯了)与升降就行了。 上面虚线框内有重要内容,要回复之后才能看得到,麻烦了!(^_^这样做的目的是把帖子顶起来,大家都看得到)
电赛四旋翼飞行器
2014年电子设计竞赛 四旋翼自主飞行器(G题) 2013年9月11日
目录 摘要关键词 (1) 一系统方案 (2) 1.1控制系统的选择 (2) 1.2飞行姿态控制的论证与选择 (2) 1.3电机的选择 (2) 1.4高度测量模块的论证与选择 (2) 1.5电机调速模块的选择 (2) 1.6循迹模块的方案选择 (2) 1.7薄铁片拾取的方案的论证与选择 (2) 1.8角速度与角加速度测量模块选择 (3) 二设计与论证 (3) 2.1控制方法设计 (3) 2.1.1降落及飞行轨迹控制设计 (3) 2.1.2飞行高度控制设计 (4) 2.1.3飞行姿态控制设计 (4) 2.1.4铁片拾取与投放控制设计 (4) 2.2参数计算 (5) 三理论分析与计算 (5) 3.1Pid控制算法分析..............................................................................................5. 3.2飞行姿态控制单元 (6) 四电路与程序设计 (7) 4.1系统组成 (7) 4.2 原理框图 (7) 4.3电路图 (8) 4.4系统软件与流程图 (9) 五测试方案与测试条件 (11) 5.1测试方案 (11) 5.2测试条件 (11) 六结论 (11) 附录 (12) 附一:元器件明细表 (12) 附二:仪器设备清单 (12)
附三:源程序 (12) 摘要:本系统由数据采集、数据信号处理和飞行姿态和航向控制部分组成。系统选用STC89C52单片机作为主控芯片,对从MPU-6050芯片读取到的一系列数据进行PID算法处理并给飞行器的电调给出相应指令从而达到对飞行器的飞行姿态的控制。采用MPU-6050芯片采集四旋翼飞行器的三轴角速度和三轴角加速度数据。用红外传感器来检测出黑色指示线,以保证飞行器不脱离指定飞行区域及达到指定圆形区域。利用超声波传感器来检测飞行器与地面的距离,以保证飞行器能越过一米示高线。利用电磁铁来吸取和投放铁片。 关键词:STC89C52单片机 MPU-6050模块激光传感器循迹电磁铁拾取铁片超声波测距定高 PID算法
仿德国无刷电调板制作说明
无刷电调板制作说明 参数: 驱动方法: A、ppm 信号驱动 B、I2C 信号驱动 功率: 55W 电压: 7.2-14.8V 电流: 8.0-20A w w w .o u r a v r .c o m 转载请注明出处
电路图 w w w .o u r a v r .c o m 转载请注明出处
元件位置图: 正面: 反面: w w w .o u r a v r .c o m 转载请注明出处
元件清单 数量 元件 描述 位号 1 ATMEGA8-16 单片机 IC1 1 78L05 三端稳压块 IC 2 3 IRFR1205 功率MOSFET NA-, NB-, NC- 3 IRFR5305 功率MOSFET NA+, NB+, NC+ 3 BC817 三极管 T1, T2, T3 1 10R 电阻(100) R32 3 100R 电阻(101) R17, R19, R25 3 470R ( 680R ) 电阻(471/681) R2, R5, R8 2 1k 电阻(102) R27, R33 15 4k7 电阻(472) R1,R3, R4, R6,R7, R9,R11, R12, R13,R15, R18,R20, R21, R22, R26 5 18k 电阻(183) R10, R14, R16, R23, R24 1 LED 绿LED LED1 1 LED 红LED LED2 17 100nF 电容(104) C1, C2, C3, C4, C5, C6, C7, C8, C10, C11, C13, C15, C16, C17, C18,C19, C20 1 1uF 电容(105) C14 1 10uF/50V 电容(106) C12 1 330uF/25V 电解电容 C9 w w w .o u r a v r .c o m 转载请注明出处
40A电调中文说明书
40A无刷电子调速器使用说明书 感谢您使用固朗公司无刷电子调速器,在使用之前请仔细阅读该使用说明书。 一、产品简介 1.科学的电路设计,全部采用进口器件制造 2.采用极低阻抗PCB(电路板),耐电流能力极强,完全能达到所标称的电流规格 3.控制电路和BEC电路采用独立的稳压电路供电,具有良好的抗干扰能力,有效的降低失控的可能性 4.控制电路和功率输出电路采用独立的PCB(电路板),有效防止功率管的温度影响控制电路,控制电路板和功率输出电路板留有2毫米的间隙,具有良好的散热环境5.具有温度保护电路 6.具有过压、欠压保护电路 7.具有细腻、优越的调速线性手感,使您感到速度平稳而有力的输出。 二、产品规格 CXM-40A-GL型 额定电流:40A 持续电流:40A 最大电流:50A(不低于10秒钟) BEC电流:最大2A(线性稳压器件) 重量: 三、产品功能 1.安全启动模式:调速器接通电源时,遥控器油门遥感无论在什么位置都不会使调速器启动,安全可靠。 2.欠压保护:输入电压低于设定值时,调速器自动降低或关闭功率输出,有效保护动力电池 3.过压保护:输入电压高于调速器的额定电压时,调速器提示音报警,此时调速器不工作,有效保护调速器的损坏
4.过温保护:当温度超出范围时自动关断功率输出,有效的保护电子调速器 5.电池类型选择:具有两种电池选择 6.启动模式:具有三项启动模式选择,适用于所有模型飞行器使用 7.遥控器兼容:可设定油门行程,兼容所有品牌遥控器 8.安全性:在正常使用时如果丢失遥控信号,调速器会自动关闭输出,有效的防止因失控造成的损失 四、油门行程设置说明 油门行程设置只用于第一次使用调速器或调速器搭配新遥控时使用,其它时候则不需设置此项 1.开启遥控器,将遥控器油门摇杆推到最高点,接通调速器电源 2.无刷电机发出一声“嘀···”接通电源的提示音 3.等待约2秒钟无刷电机发出“嘀···嘀···”油门最高点确定提示音 4.将遥控器油门摇杆拉到最低点 5.等待约1秒钟无刷电机发出“嘀···”油门最低点确定提示音 6.无刷电机发出“嘀······嘀···”准备就绪提示音 7.此时可以正常使用了! 五、正常使用过程说明 1.开启遥控器,将遥控器油门摇杆拉到最低点 2.无刷电机发出“嘀······嘀···”准备就绪提示音 3.此时可以正常使用了! 六、调速器编程设置 编程设置分为四个步骤 1.进入编程 2.选择设置项 3.选择设置项下的参数项 4.退出 (一)、进入编程模式
好盈电调,新西达HW电调中文使用说明书
感谢您购买本产品!无刷动力系统功率强大,错误的使用可能造成人身伤害和设备损坏。为此,我们强烈建议您在使用设备前仔细阅读本说明书,并严格遵守规定的操作程序。我们不承担因使用本产品而引起的任何责任,包括但不限于对附带损失或间接损失的赔偿责任;同时,我们不承担因擅自对产品进行修改所引起的任何责任。 我们有权在不经通知的情况下变更产品设计、外观、性能及使用要求。 产品特色: ü全球首创“锂电平衡放电保护”功能,实时监测每个锂电单体的放电情况,一旦单体达到保护电压阈值即采取相应保护措施,有效防止电池组损坏,降低玩家消费支出(备注:仅“守护神”系列无刷电调具有本功能) ü首创开机奏乐功能,炫出您的个性。(选配编程设定卡后,您可以从15首乐曲中任选一首写入电子调速器,也可以关闭奏乐功能)ü采用超低阻抗PCB(印刷线路板),具有极强的耐电流能力。 ü电源输入端采用日本名牌超低阻抗大容量电容,大大提升电源稳定性,同时对电池具有保护作用。 ü具备电压保护/过热保护/油门信号丢失保护等多重保护功能,有效延长电调使用寿命。 ü具有普通启动/柔和启动/超柔和启动三种启动模式,适用于固定翼飞机及直升机。 ü可设定油门行程,兼容市面上所有遥控器。具备平滑、细腻的调速手感,一流的调速线性。 ü微处理器采用独立的稳压IC 供电,而不是从BEC输出取电,具有更好的抗干扰能力,大大降低失控的可能性。 ü最高转速可以达到210000 RPM(2极马达)、70000 RPM(6极马达)、35000 RPM(12极马达) 。 ü具备完整的自主知识产权,产品可持续升级更新,用户更可以享受原厂软件升级服务。 ü配合小巧易携带的编程设定卡(注:选配件),具有简单直观的界面,使您随时随地修改各项编程参数。(详见设定卡说明书) 模型飞机用无刷电机电子调速器产品规格:
JIVE电调中文说明书
·由于译者水平有限,因此不能保证译文准确无误,不明确之处请在对照原文自行鉴别·欢迎大家自由使用、分发、转载,敬请保留译者署名 ·译者联系方式:QQ:15109082 5imx帐号:guyama ·欢迎以各种形式提出修改建议.最后修改时间2010-12-20
1 名词解释 ESC 电子调速器 APM 自动设置模式 JIVE JIVE电调 BEC 电池稳压电路 EMF 电子刹车 EMF刹车电子刹车 跳线本说明书封面电调照片中左侧那个小东西 LED 发光二极管 ProgCARD JIVE电调设置卡,分为卡1和卡2(有了本说明书,其实没必要买卡1) 信号表示: “哔哔哔”升调音 “哔哔哔”降调音 2 安全提示 !电调需要充分的散热,避免由温度升高带来的问题。 ·在电机运转时绝对不要把电池从JIVE ESC上拔下来。 ·不要用把ESC和电线捆在一起,否则可能会损坏。 ·当一个电池和电机与电调连接在一起,电机就有可能启动(比如:误操作或电子故障)·电机(特别是带着桨的)或者破损的零件可能会造成相当大的伤害。 ·ESC仅允许在排除了对物体的损坏以及对人体的伤害可能性的情况下使用。 ·在任何情况下使用损坏的ESC(比如:机械或者电子的影响,进水,等等),进一步使用将有可能导致ESC突发性的故障。 ·ESC仅支持镍镉,镍氢,锂聚合物电池或铅酸电池,不支持除此以外的供电单元。禁止与任何交流电网连接。当使用高性能电池时,必须保证充分的散热。 ·ESC只能在没有静电的环境下使用。 ·不要延长电机线或者电池线,否则我们承诺的性能将无法得到保证。延长线可能导致ESC 损坏。 ·测量电流时,请使用非串联式的仪器(例如钳流表),串联式测量的器件可能会损坏ESC。·当使用BEC时,必须并联上电量充足的接收电池,否则电线的破损、电池的损坏、插头的松动或者BEC部分的缺陷可能导致接收系统的失控。第一次起飞前必须在地面测试系统,确保BEC的能力足够正常使用。 3 JIVE ESC的技术数据 JIVE ESC 有一个模式设置选项。每个模式可以设置各自的需要的参数。不需要复杂的设置,还可以使用专用设置卡ProgCARD I (商品编号# 9305) 和ProgCARD II (商品编号# 9306) 来调整选项。 . 所有JIVE ESC的BEC的通用数据: BEC 电压:标准5.6V ,最小5V ,最大6V BEC 电流:持续电流5A,最大电流15A
四轴飞行器的基本相关知识
四轴飞行器的基本相关知识: 四轴,顾名思义就是有四根轴的飞行器,它可以垂直起降,但与直升机又大不相同,是这几年来迅速兴起的一种飞行器 本教程制作的是轴距550mm的1kg级别四轴飞行器,可以满足航拍(平民级别)等一系列需求,载重余量较大,扩展性也高。 组成部分: 无刷电机*4 无刷电调*4 飞控板*1 电池 遥控器 四轴机架 名词解释: 无刷电机: 指航模用的三相交流无刷电机,低端品牌有新西达,好一点的有朗宇等; 在这里我们选择2212级别kv850-1050之间的无刷电机 (想知道具体是什么样的电机?TB一下“2212 kv1000”)
很多人会问为什么不用直流电机? 第一马力不够;第二自重太大;第三寿命太短;第四转速太高;第五效率低下;第六实践证明直流电机不适合做四轴动力。 不要和我说空心杯,那是玩具四轴用的。 无刷电调: 即输出三相交变电流的电子调速器因为我们用电池供电,输出的是直流,需要经电子调速器(简称电调)转换成三相交流电。同时电子调速器可以接受遥控信号从而调整电机转速。 这里我们选用20A ~30A 的电调,同样也有低端电调比如新西达,建议入门的话采用好盈20A电调。(想了解更多有关电调?TB一下“无刷电调20A”) 继续刚才的名词解释: 飞控板:即飞行控制板,是飞行器的灵魂!! 飞控板的基本功能就是协调四个电机的转速,比如要悬停,它就不停修正各个电机转速达到悬停,此时你不需要手动修正就可以问问地悬停了(我们称为自稳模式);要前进,则四轴后方的电机转速增加,四轴被“顶”向前;后退,左移,右移同理;要旋转,则通过调整对角两个电机转速实现,这个以后再说。
电调天线基本步骤、指令
1、 LST RET 查询是否存在电调天线 若没有查到相应结果,无电调天线,不能电调。 2、若有单元动态信息且开工状态,可用;实际倾角有值,可直接调整: ⑴MOD RETSUBUNIT 设置下倾角; DSP RETSUBUNIT 查询默认20 ⑵MOD BFANT 设置权值;(与倾角值相同)(F频需要,D频不需要) 3、有单元动态信息开工状态不可用;实际倾角 NULL,则进行下一步,开启天线端口 (1)MOD ANTENNAPORT F频段: MOD ANTENNAPORT:CN=0,SRN=60,SN=0,PN=R0A,PWRSWITCH=ON,THRESHOLDTYPE=UER_SE LF_DEFINE,UOTHD=10,UCTHD=15,OOTHD=400,OCTHD=360; MOD ANTENNAPORT:CN=0,SRN=61,SN=0,PN=R0A,PWRSWITCH=ON,THRESHOLDTYPE=UER_SE LF_DEFINE,UOTHD=10,UCTHD=15,OOTHD=400,OCTHD=360; MOD ANTENNAPORT:CN=0,SRN=62,SN=0,PN=R0A,PWRSWITCH=ON,THRESHOLDTYPE=UER_SE LF_DEFINE,UOTHD=10,UCTHD=15,OOTHD=400,OCTHD=360; D频段: MOD ANTENNAPORT:CN=0,SRN=200,SN=0,PN=R0A,PWRSWITCH=ON,THRESHOLDTYPE=UER_S ELF_DEFINE,UOTHD=10,UCTHD=15,OOTHD=400,OCTHD=360; MOD ANTENNAPORT:CN=0,SRN=201,SN=0,PN=R0A,PWRSWITCH=ON,THRESHOLDTYPE=UER_S ELF_DEFINE,UOTHD=10,UCTHD=15,OOTHD=400,OCTHD=360; MOD ANTENNAPORT:CN=0,SRN=202,SN=0,PN=R0A,PWRSWITCH=ON,THRESHOLDTYPE=UER_S ELF_DEFINE,UOTHD=10,UCTHD=15,OOTHD=400,OCTHD=360; (2)查询 DSP ANTENNAPORT(若无电流,打不开,不能电调) (3)打开天线端口有电流:SCN ALD:扫描天线设备柜框槽序列号 (4)MOD RET 设备编号 0 1 2 添加天线1、2、3 单天线双极化级联安装 序列号:对应柜框槽m 单天线 D频段是y结尾 F频段是b结尾 设备编号与本地小区标识,必须一致 (若没加天线)ADD RET (5)CLB RET 校准天线按照子单元
DIY组装无人机电机+电调+电池+桨叶搭配技巧
一.怎么挑选电机,基本参数怎么看 电机KV值:电机的转速(空载)=KV值X电压;例如KV1000的电机在10V电压下它的转速(空载)就是 10000转/分钟。 23.KV值? 答:指加一伏电压,电机转速增加多少,KV2000即指电压在10伏的时候,电机每分钟空转转速是 20000转。这个参数的意义是:能够帮助你判断这个马达的特性, KV高马达就暴力,内阻小,电流大,功率高,转速快或者说相同电压下爆发出来的功率高拥有很好的极限转速,但是受到电机自身的设计与材料限制,会有一个功率上限,一般说KV高的配小的高速桨,KV低的配大的低速桨,这个与开车有点类似,车感觉劲道最足的时候往往转速比较低。 21..电动机的品牌? 答:常用的有,朗宇、新西达、亚拓、蝎子、浩马特、花牌、银燕;一般固定翼用朗宇较多,新西达(便宜)次之,直升机用亚拓、蝎子(太贵)次之 22.电机的型号? 答:电机型号,每个厂家都有自己的编号规则,主要有KV值,电机编码。以朗宇电机,常规如无刷电机的型号 2212 2217 2208 22指电机直径 12 17 08 指电机机身长度
体积 2216 2212 2216动力就强于2212,具体数值可参考朗宇官方数据 2212表示线圈外径22毫米,长度12毫米 二.关于航模中电机+电池+桨的动力选择 针对电机+电池+桨的推力综合如下: 1.2208 36g/27.8×23mm,2212 48g/27.8x27mm,重量只相差8g; 2.同一系列的电机,高KV+电池/桨的推力》低KV+电池/桨的推力 3.不同系列电机,2208高KV+2S+桨1 ~=~ 2212低KV+3s+桨2; 此时,因3S电池重于2S,导致2212方案重量大于2208方案; 4.电池的重量2S与3S的相差极大(使用某型号做参考) 1) 2S 20C 850mAh 45g 2) 3s 20C 1300mAh 111g 3) 3s 20C 2200mAh 175g 4) 3s 20C 2800mAh 206g 5) 2s 20C 1300mAh 85g (几乎是850mAh的一倍重量) 6)2s 20C 1800mAh 128g 5.飘飘机通常的机身空重在200g以内,单上翼300g以内(不含电机、电池,TDF6接收机5g左右、舵机9g*4=36g,电调20g以内) 6.航模来说,推比和翼载很重要。推比高,有动力的时候好飞,但同时对电池的要求大;翼载越小,飞机的滞空性越好,而飞机做好之后,机翼的面积已经确定,因此为滞空性好,空机之外的负载越小越好。
2017电赛设计报告(更改)
2017电赛设计报告(更改)
第一页是空白页
2017年全国大学生电子设计竞赛 四旋翼自主飞行器探测跟踪系统(C题) 【本科组】 2017年8月12日
摘要 本系统由数据信息采集、数据信号处理、飞行姿态稳定和航向控制部分组成。系统选用瑞萨RX23T MCU单片机作为主控芯片,以STM32F103VET6为核心的飞控完成飞机自稳,通过超声波传感器来检测飞行高度,再通过瑞萨芯片分析并向飞控传递信号来保持或改变飞行状态。利用无线信号发射接收装置来建立小车与飞行器之间的联系,完成配对后会有二极管和扬声器发出配对成功信号,再通过接收方位信号的改变来调整飞行姿态以完成跟随小车的目标。 关键词:瑞萨R5F523T5ADFM单片机 STM32F103VET6最小系统板 超声波测距 PID算法 无线收发模块
目录 1系统方案 0 1.1 控制系统的选择 0 1.2 飞行姿态控制的论证与选择 0 1.3 高度测量模块的论证与选择 0 1.4 电机及调速方案的论证与选择 (1) 1.5 无线信号发射与接收模块的论证与选 择 (1) 2系统理论分析与计算 (1) 2.1控制方案的设计与分析 (1) 2.1.1 飞行器起飞及悬停方案设计 (1) 2.1.2 飞行姿态控制设计 (2) 2.1.3 飞行高度控制 (2) 2.1.4 小车与飞行器联动设计 (2) 2.2 参数的计算 (2) 2.2.1 飞行稳定的PID计算 (2) 2.2.2 高度控制的PID计算 (2) 2.2.3 声光联动的参数设定 (2) 3电路与程序设计 (3) 3.1电路的设计 (3) 3.1.1系统总体框图设计 (3)
凤凰(卡斯特)电调设置
凤凰(卡斯特)电调设置 如何进入程序设定: 将油门拨杆推至全开的位置, 将电池接上,将油门拨杆推至中间位置,接着将油门拨杆推回至全开的位置,再一次将油门拨杆推至中间位置 以下带*的是工厂默认的设定 程序设定1:切断电压 设定推荐用电池 选项1: 4.0V切断 5节镍镉或镍氢电池组。 * 选项2: 5.0V切断 6-8节镍镉或镍氢或2节锂电池组。 选项3: 6.0V切断 7-10节镍镉或镍氢电池组。 选项4: 7.2V切断 9-12节镍镉或镍氢, 3节锂电池组。 选项5: 9.0V切断 12-14节镍镉,12-16节镍氢或4节锂电池组。 选项6: 12 V切断 16节镍镉或3节锂电池组。 程序设定2: 电流限制 注意:改变电流限制要自担风险,改变限制后引起电流太大损坏调速器不在保修之列,经验丰富的人才可以使用这个功能。电流限制是当测到过大电流时调速器的反应,共有5个选项: 选项1:非常灵敏(刚超过很小一点就立即切断) 选项2:灵敏(刚超过一点就很快切断) * 选项3:标准(超过一些,过一会儿切断) 选项4:不灵敏(超过很多时,过会儿切断) 选项5:超过很多都不切断(超高很多都测不到) 程序设定3:刹车类型 在刹车前可延缓4秒钟,软刹车是全刹车的50%的作用力,硬刹车是用100%的刹车作用力。只有电池在10节以下是才可以用硬刹车。 * 选项1:软、延迟刹车:飞机通用,带固定桨或折叠桨。 选项2:硬、延迟刹车:需要较大刹车力的直驱应用。 选项3:软刹车,无延迟:比赛中用,要求延迟很短 选项4:硬刹车,无延误:比赛中用,要求刹车快,延迟很短 选项5:无刹车,直升飞机用 程序设定4:油门类型 * 选项1:自动校准油门模式:推荐使用 选项2:固定油门模式:固定螺距直升飞机用
新西达电调设置和参数
新西达电调设置和参数 LiPo 聚合物锂离子电池 NIMH 镍氢电池 NICD 镍镉电池 BEC 给接收机供电的降压电路 电压范围:4V-16V 电池数量:4-12NIMH 2-3LIPO(4LIPO不允许使用BEC输出) BEC输出:5V 3A。2LIPO 4-5微型舵机3LIPO 3-4微型舵机 保护功能: 自动选择2-3LIPO 分别保护电压是6V/9V;自动选NIMH,每节保护电压是0.8V;安全启动,油门位置不对禁止启动;温度保护,110度表面温度停机;失控保护,无信号1秒以后停机。 性能描述:转速上限,2极内转高达300000转,12极外转50000转,14极外转42000转。8KHz PWM控制,使用转速控制曲线。自动油门适应,适合更多遥控设备。 使用BEC,MCU分离电源供应,工作更稳定。 设置方法: 1,打开发射机,把油门推到最高(FUTABA系列发射机需要把油门通道选择REV使用)。2,连接好接收机,马达。 3,接通电调电源,发射机正常的话,就是有以下声音:(如果这个声音结束以后是一声长的低的声音以后不再有声音,那么检查发射机油门通道反向设置。) B B 表示LIPO自动保护 BB BB 表示NIMH /NICD自动保护 BBB BBB 表示刹车选择 BBBB BBBB 表示工厂参数重新设定。(没有操作时,所有声音将连续循环下去,直到有操作请求。) 声音循环过程中有您要的设置,在听到提示声音的第一音节时,(比如选择LIPO自动保护,听到一声B 时,油门拉到最低位)把油门迅速拉到最低位置即可。同时马达会发出很尖锐的声音来确认。 此时,有另外的设置的话,迅速把油门推到最大,即可做下1个选项的选择。 如果说您要的设置完成了,那么等待2秒钟,马达再次发出合适的电池保护确定声音,并且确认油门位置以后就可以使用。 LIPO自动保护只有2个保护电压保护点,即6V 和9V ,电池可以不必要使用满电的电池。NIMH自动保护是按电池实际数量来计算的,每个电池设定为0.8V,为了准确的判断电池的电压,请把电池充满。如果不充满,电调将按照70%的电压估算保护电压。(使用4LIPO 时候也可以使用此功能) 刹车: 出厂设置是无。可以在实际使用过程中做一次刹车设置操作,这样就有马达在关闭油门以后利用反电动势进行刹车。 如果要解除这个刹车功能,可以再设置一次刹车操作,那么功能既被取消。 工厂参数重新设定功能,因为本系列电调有过热和误操作保护功能,如果发现你的电调加速,或者转向,或者是油门曲线等任何特性和新的时候有如何变化,那么可以做一次工厂
新西达A2212外转子无刷电机
新西达A2212外转子无刷电机 优惠价:60元 外形尺寸:27.8×27mm 重量:48克 输出轴径:3mm 目前可选KV:1000 1400 2200 测试数据: A2212,KV1000: GWS1047RS桨,11V 15.6A,6810转,推力886克。10V 14A,6530转,推力820克。 GWS1060HD桨,11V 13.1A,7630转,推力745克。10V 11.6A,7260转,推力675克。(450-550克的3D配置,3S 12-15C 1000-1500mAh) A2212,KV1400: GWS1047RS桨,8V 18A,6380转,推力775克。7V 15.1A,5860转,推力650克。(400-450克的3D配置,2S 12—15C 1200-1500mAh) GWS1060HD桨,8V 15.2A,7220转,推力670克,7V 12.7A,
6560转,推力553克。 GWS9050HD桨,11V 18.9A,9720转,推力903克,10V,15.4A,9240转,推力816克。 GWS8040HD桨,11V 12.6A,11800转,推力700克。10V 11A,11000转,推力606克。 GWS8060HD桨,11V 17.8A,10250转(破桨了),10V,15.4A,9660转。(600克级别的电动3A 普通固定翼的配置) A2212,KV2200: 本店5043桨,11V 21.1A,18800转,10V 19.1A,17600转。(400-650克级别,高速飞翼后推像真机用的配置。3S 15-20C 1500-2000mAh) GWS8040HD桨,8V 24A,12450转,7V 19.8A,11400转。 新西达无刷电机A2212具体参数: A2212 KV1000 新西达1060HD桨,11V 13.1A,7630转,推力780克。10V 11.6A,7260转,推力675克。(450-550克的3D配置, 3S 12-15C 1000-1500mAh)
mk电调说明书
mk电调说明书 篇一:电调设置选项说明书 电调设置选项说明书 45A/50A/60A/70A/80A/100A/125A/200A ·如何进入选项设置模式: 1. 把马达和电调,以及接收机相互之间的连线全部接好,不过注意先不要连接电池和电调的电源线。 2. 打开遥控器,并把油门杆位拨到最高(满油门)。(注意:大部分Futaba遥控器的油门杆位是反向的。) 3. 联接电调与电池的电源线,电调上电,并控制马达并发出一些带节奏的鸣叫。 ·如何操作选项设置: 进入选项设置模式后,马达会发出一些有特定规律的鸣叫:一个升调的短音乐之后接一个或多个短鸣响。这些声音是电调程序当前选项的提示音,每个提示音会重复3次之后变换为下一个主选项,在声音结束之前都可以进行命令(油门杆位拨动)的输入。主选项菜单是循环的,如果错过了,可以等提示音再次到达,只是要花一些时间而已。主选项提示声的含义如下表: 表1.1 提示音提示音含意 短音乐+ 1短高?—主选项一:电池类型及电池数量鸣
短音乐+ 2短高?——主选项二:油门相关设置鸣 主选项三:刹车(标准固定翼版短音乐+ 3短高?———本电调)鸣 /操作模式(电直版本电调) 短音乐+ 4短高?————主选项四:方向及保护模式鸣 ?————短音乐+ 5短高主选项五:PWM设置—鸣 第一步,选择主选项并进入子选项菜单。如表1.1,当听到需要设置的主选项提示音出现时,因为提示音是重复3次的,建议第一次听到则留意,第二次听到则复核并进行选择操作:拨动油门杆位到中间位置,此表示选择当前主选项并进入子选项菜单。 因为已经进入第二层菜单,现在马达发出的声音会有一些变化以区别主选项菜单,升调短音乐改为短高鸣提示当前为第几主选项,主选项的短高鸣改为长低鸣提示当前为第几子选项(提示主选项的一个或多个短高鸣+提示子选项的一个或多个长低鸣)。详细含义可以查第二页和第三页的子选项列表。每个子选项提示音也是重复3次然后变成下一子选项并循环。第二步,选择子选项并保存。当听到希望设置的子选项的提示音出现,因为提示音是重复3次的,建议第一次听到则留意,第二次听到则复核并进行选择操作:拨动油门杆位到顶部位置,此操作表示选择当前子选项并保存。
中特威车用电调CAR ESC中文说明书
中特威科技竞赛级车用无刷电子调速器说明书 尊敬的用户:感谢您使用中特威科技有限公司设计、制造的竞赛级车用无刷电子调速器。ZTW 车模用调速器专门针对竞赛级车模用而开发的有感,无感无刷马达专用电子调速器。我们强烈建议您在使用之前阅读本使用手册 中特威公司有权不经通知变更其产品,包括其外观和性能参数及使用要求;对其产品是否适合特定用途不作任何保证、申明或承诺。不承担因第三方产品相关修改所造成的任何责任,中特威科技有限公司亦不承担因应用或使用任何产品或电路而引起的任何责任,包括但不限于对附带损失或间接损失的赔偿责任。 一、车用无刷电子调速器主要特性: ● 快速的油门响应、强劲的加速度、比例式的刹车与优异的油门线性 ● 可用电脑编程菜单设置和软件升级,还有操作简单方便的编程卡 ● 可用电脑编程油门线性设置,根据油门曲线图,您可任意设置油门点状态 ● 可用电脑,编程盒编程前进与倒车输出功率大小 ● 可用电脑,编程盒编程刹车比 ● 多重保护功能:电池低压保护、温度保护、油门失控保护、马达堵转保护 ● 有感电调兼容NOV AK LRP ORION 等品牌的有感无刷马达 ● 按键设置功能;一键式复位功能 二、首次使用车用无刷电子调速器: 在使用全新的车用无刷电子调速器前请您仔细检查各个连接是否正确可靠。检查一切正常后,请按以下顺序启动您的电子调速器。(出厂没有接线或您需要配其它品牌马达,请按图示连接)连接有感马达时,请注意三根电调马达线颜色蓝色线( A )、 黄色线( B )、 橙色线( C )、一定要对应有感马达外壳标示A 、 B 、 C 连接。马达传感线要顺应插头位置连接。 图示: 集合有感与无感车用电调功能指示灯说明: 有感与无感车用电调功能转换 电调连接电源后,会自动检测马达类型,并通过LED 灯指示,不用人为设置。 当您电调使用有感功能时,马达传感线掉落后,电调会自动转换为无感工作模式运行。 SET 键 马达橙色线( C ) 马达黄色线( B ) 马达蓝色线( A ) 电池线( + ) 电池线( – ) 电调开关 连接接收机 马达传感线插座
四轴飞行器DIY入门 篇一
四轴飞行器DIY入门篇一:主要部件介绍及选购 为啥要玩四轴呢?第一是四轴DIY的门槛近些年一路走低,各式各样的飞控层出不穷(这里要感谢那些Do飞控的大神们!),不必花费太多就能拥有一架四轴飞行器;第二就是咱能飞的空间越来越萎缩,想方便的在市内去飞固定翼实在是难找地方,四轴无需太大的场地就能爽飞。 什么是四轴飞行器? 通俗点说就是拥有四个独立动力旋翼的飞行器,四轴飞行器是多轴飞行器其中的一种,常见的多轴飞行器有两轴,三轴,四轴,六轴,八轴。 四轴飞行原理 为什么四轴能飞起来?没有机翼,升降舵,方向舵,他怎么控制升降/方向? 飞行器的主要飞行动作有垂直(升降)运动,俯仰运动,前后运动,横滚运动,侧向运动,偏航运动: 垂直(升降)运动最好理解,就是油门控制,推油门上升,拉油门降低,所有升力来自旋翼。 仰俯运动,在固定翼中是靠推拉升降舵来实现,四轴则是通过控制其中2个(或4个)轴线上的电机转速来实现,如下图所示:1号电机提速,3号电机降速,四轴延X轴方向仰起。并且,仰俯运动的同时,四轴也会做前后运动,四轴发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反而已。
横滚运动,在固定翼中是靠控制副翼来实现,四轴则也是通过控制其中2个(或4个)轴线上的电机转速来实现,和仰俯运动控制方式一样,只是作用的电机不同而已,如下图所示:4号电机提速,2号电机降速,四轴延Y轴方向翻滚。并且,小幅度的横滚运动,会导致四轴做侧向运动。 偏航运动,在固定翼中是靠控制方向舵来实现,四轴则是通过反扭力来实现。旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭力,为了克服反扭力影响,四个旋翼,两个正转,两个反转,且对角线上的来自4各个旋翼转动方向相同;反扭力的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭力相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭力会引起四旋翼飞行器水平转动,从而实现偏航运动,入下图所示:1,3号电机转速提高,2,4号电机转速降低,四轴就会水平旋转起来,由于总体的升力不变,所以不会导致四轴上升/下降。 四轴飞行器的类型 根据电机分布的位置,常见的四轴飞行器类型有以下几种: