04-偏移算法的实现和结果分析

第4章偏移算法的实现和结果分析
通过前面内容的介绍,我们了解了波动方程法偏移的基本原理和复杂地表条件下的叠前深度偏移方法的基本原理。本章主要通过数值例子检验逆时偏移的效果,然后通过理论模型来检验前面研究的基于起伏地表的波动方程偏移的正确性和有效性,比较各种方法的成像效果,并对其成像结果进行分析。
4.1 逆时偏移数值分析
4.1.1 单点成像
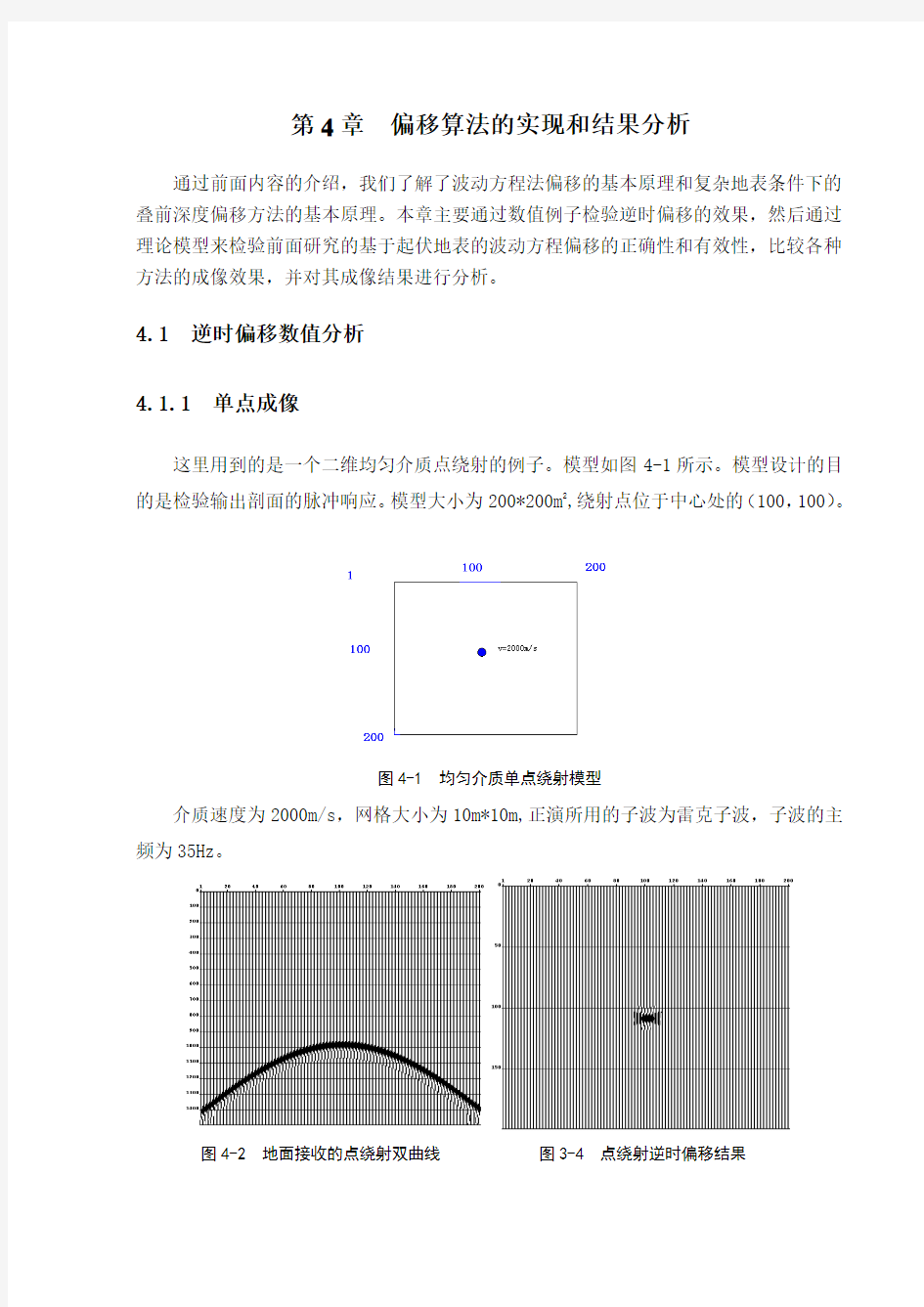
这里用到的是一个二维均匀介质点绕射的例子。模型如图4-1所示。模型设计的目的是检验输出剖面的脉冲响应。模型大小为200*200m2,绕射点位于中心处的(100,100)。
图4-1 均匀介质单点绕射模型
介质速度为2000m/s,网格大小为10m*10m,正演所用的子波为雷克子波,子波的主频为35Hz。
图4-2 地面接收的点绕射双曲线图3-4 点绕射逆时偏移结果
图4-2为其地面接收的绕射双曲线,图4-3为逆时偏移得到的成像结果。可见绕射曲线收敛很好,能量集中在绕射点附近。
虽然点绕射体似乎在实际地震勘探中不如反射界面那么常见,但是由于可以把反射界面或绕射体当作许多这样的点的集合,所以点绕射体的偏移具有一般性的意义。它的成像证明了这种逆时计算的合理性和可行性。
4.1.2 逆冲断层成像
这里选用了一个逆冲断层的例子。速度模型如图4-4所示,大小为800*500,网格大小为2*2m。速度参数大小为由上至下:1500m/s,1800m/s, 2200m/s, 3000m/s, 3500m/s, 4000m/s。模型中有断层,背斜,向斜等地质构造。
图4-4 逆冲断层模型
在合成的叠加记录(图4-5)上可以看到断点绕射波,斜界面的同相轴,以及多次波的存在,在逆时偏移剖面(图4-6)中可以看到同相轴位置与速度模型一致,多次波影响消除,但由于是隔一道采样做的偏移处理,由于网隔的加大,存在频散,导致分辨
率降低。从上述数值模拟例子可以知道此方法没有倾角限制,对陡倾角和复杂构造同样可以清晰地成像。
图4-5 逆冲断层的合成叠加剖面
图4-6 任意差分精细积分结果(隔一道采集做的偏移)
4.1.3 复杂构造成像
这里以如图4-7所示的模型分别用Kirchhoff深度偏移、相移法和有限差分深度偏移方法与逆时偏移对同一叠加剖面(图4-8)成像,比较了这些偏移方法的效果。
图4-7 模型示意
模型由一个断层和一个背斜构造构成,大小为1200*400m2,网格大小为1*1m,速度
由上至下分别为1700m/s,2500m/s,3000m/s。图4-8为其对应的叠加剖面。
图4-8 模型对应的叠加剖面(共1200道)
图4-9为Kirchhoff深度偏移的结果,图4-10为相移法偏移结果转换到深度域的剖
面,图4-11为显式有限差分深度偏移的结果。图4-12为逆时偏移的结果。
图4-9 Kirchhoff深度偏移剖面
在图4-9上可以看到主要的同相轴都成像很好,在速度发生横向变化的地方陡倾角断面以及下伏的背斜平界面都能清晰准确的成像。由于Kirchhoff自身方法的影响,在偏移剖面中可以看到有背景噪音存在。
图4-10 相移法偏移剖面
图4-10是相移法偏移结果经时深转换变换到深度域的结果,以便于和其他方法对比。由于相移法属于时间偏移范围,不能很好地处理速度的横向变化问题。因此可以看
到在上图中由于上伏断层引起的速度横向变化的影响使得下面的平界面不能很好得成像。与Kirchhoff深度偏移相比成像效果要差很多。与图4-6所示的显式有限差分深度偏移和任意差分精细积分逆时偏移相比也差很多。
图4-11 显式有限差分深度偏移剖面
在图4-11显式有限差分深度偏移的偏移剖面上可以看到偏移成像效果很好,只是边界有一些残余能量。陡倾角的断面成像很好,下伏地层的背斜和平界面也没有发生畸变。
图4-12 逆时偏移剖面
图4-12是逆时偏移的结果,可以看到同相轴归位很好,波形也没有发生畸变,无论是陡倾角还是下伏地层均成像很好。通过与上述三种偏移方法对应剖面的对比可以看出逆时偏移效果很好。在模型速度准确已知的情况下成像最准确,70°显式有限差分偏移的效果与之最接近,Kirchhoff深度偏移次之。相移法最差,值得一提的是逆时偏移计算算法复杂,计算量大所以计算也最费时。
4.2 marmousi模型
marmousi模型,它是一个比较复杂的2-D地质模型。模型上部主要有三大断裂组成;中部有一盐丘;深部两侧有高速体,中间在2400m以下有一低速目的层。其速度场如下图所示:
图4-13 marmousi模型速度场
所用炮记录来自于SEG/EAGE提供的声波模拟记录。该模型记录有240炮,每炮96道,750个采样点,4ms采样,最小偏移距为200m,道间距为25m;速度场为497*750,CDP间距为12.5m,深度采样为4m。单炮记录如图4-14所示。
4.2.1 几种波动方程叠前深度偏移算法的Marmousi模型偏移试验
下面是各种波动方程叠前深度偏移算法的Marmousi模型偏移结果,这里把它们放在一起,以方便对比。图4-3(a)、(b)和(c)依次为频率-空间域优化系数的单程波方程有限差分偏移、Fourier有限差分偏移和分步Fourier(相屏)偏移的结果。
图4-14 marmousi 模型单炮记录
(a) 频率-空间域有限差分法叠前深度偏移结果 (b) Fourier 有限差分法叠前深度偏移结果
图4-15 几种偏移方法Marmousi 模型的叠前深度偏移剖面
总体看来,几种偏移方法在构造成像方面都基本达到了预期的效果。频率-空间域有限差分法与Fourier 有限差分法偏移对振幅的保持做得较好。但有限差分偏移剖面的信噪比较其它剖面要低,这主要受制于旁轴近似方程的精度和差分频散等因素的影响。在数值试算中Fourier 有限差分偏移对复杂地质体的成像效果最好。
4.2.2 逆时偏移算法的Marmousi 模型偏移试验
图4-16 marmousi 逆时偏移成像结果图
(c) 分步Fourier 法叠前深度偏移结果
图4-17 marmousi逆时偏移成像结果精细处理成果图
从图4-16可以看出,逆时偏移方法具有较强的解决水平地表偏移的能力。虽然讨论的模型比较复杂,有断层和隆起构造,但总体来说比较简单。而图4-17是对图4-16进行精细处理之后的结果。可以看到其偏移结果更为细致、清晰,分辨率也明显提高了,特别是图中用椭圆圈出来的位置,连断裂过程中所拉出的褶皱也能清晰看出来。这正好说明了逆时偏移对复杂构造能精确成像(只要速度给得正确)。
以上我们分析的是水平地表情况下的marmousi模型,而当遇到起伏地表情况时,其偏移成像的结果也不错。起伏地表的marmousi模型速度场图4-18所示:
图4-18 起伏地表marmousi模型速度场
如图4-18所示,再对比图4-13,可以认为起伏地表marmousi模型是对水平地表marmousi模型的改进,它也是一个比较复杂的2-D地质模型。模型所示地表呈正余弦状起伏,其上部主要有三大断裂组成;中部有一盐丘;深部两侧有高速体,中间在2400m 以下有一低速目的层。
图4-19展示了理想状态下的单炮记录无随机噪声偏移结果。由上图可知:虽然没有随机噪声的干扰,对起伏地表下的复杂地质情况(marmousi模型)的偏移成像效果并不好。其中,地表呈正余弦状起伏还很明显,中部的盐丘依稀可见,而其上部主要的三个倾角较大的断裂已经不是很清楚,深部情况也非常模糊。
图4-19 单炮记录无随机噪声偏移结果
图4-20 逆时偏移成像结果图
前面已经证实逆时偏移是可以解决水平地表情况marmousi模型,现在对于更加复杂的起伏地表marmousi模型,分析其结果如下:
如上图4-20所示,逆时偏移对起伏地表下的复杂地质情况也是可以直接偏移成像的。从上图可以看到,地表呈正余弦状起伏很明显,中部的盐丘以及深部的情况也比较清楚,特别是其上部三个倾角较大的断裂成像非常清晰。因此,可以认为逆时偏移能复杂构造成像,而大倾角成像正是它的主要特色。基于起伏地表情况下的直接成像,逆时偏移方法效果较好。
4.3 SEG模型
以下采用的是国际上标准的SEG起伏地表模型(Amoco和BP公司设计的加拿大起伏地表逆掩断层模型)数据。我们使用在SEG帮助下,由Sam Gray和Gary MacLean合成的加拿大逆掩断层正演数据。该正演炮数据共有277炮,最大道数为480道,每道2000个采样点,4毫秒采样,道间距为15米,最大偏移距为3600米,最小偏移距为15米,炮间距为90米。速度模型为1668*1000,横向采样为15米,纵向采样为10米。地表形态起伏较大,最大起伏为1747米,地表既有高速层出露,也有低速体出露,横向速度变化剧烈,具体形态见图4-21。
图4-21 SEG模型地表形态图
从中我们可以看到该模型构造极其复杂,地表高速低速体同时出露,横向速度变化剧烈;地下地层扭曲严重,且有多个逆掩断层,此外整个模型深度达到10000米;可见该模型是验证起伏地表波动方程叠前深度偏移,以及波动方程叠前深度偏移算子有效性、适应性的良好模型。图4-22给出的是模型的速度场,图中的第一个起伏面为地表。单炮记录见下图4-23、图4-24:
图4-22 SEG模型速度场图4-23 SEG模型单炮记录
图4-24 单炮记录局部放大记录
以SEG起伏地表逆掩断层模型数据为测试数据,在理论模型速度和通过道集速度分析得到的速度两种条件下,分析对比常规叠后时间偏移、水平地表叠前时间偏移、起伏地表叠前时间偏移和起伏地表叠前深度偏移的结果来了解这些偏移方法对复杂构造的适应性。
图4-25 wxFD法起伏地表偏移结果
图4-26 偏移结果的局部放大
图4-27 FFD起伏地表偏移结果
在图4-25中,我们给出了频率空间域有限差分法起伏地表叠前深度偏移的结果,并在图4-26中显示了局部放大后的结果。对比图4-25与图4-26,我们可以看到5000米以上(见图4-24),使用该方法可以较好的成像,不论地表形态、浅层构造还是内部构造都比较清晰;但是噪音比较大。而在5000米以下,仅仅是6000米左右隐约可以看到构造形态,其余的地方都为噪音所淹没。
图4-27是FFD法起伏地表法叠前偏移对模型的成像效果。可以看出不论地表形态、浅层小构造、中深层逆掩断层以及深部高速顶部都得到了较好的成像。图4-28是Gray,S.H.与Marfurt,K.J.在1995年获得的Kirchhoff深度偏移结果。对比发现两个整体效果相当,但FFD法在断点成像方面较为清晰。
图4-28 Gray,S.H.与Marfurt,K.J.的结果
图4-29 逆时偏移成像结果
图4-29显示为本文研究的逆时偏移成像结果,可以看出逆时偏移法对起伏地表模型的成像效果很好,不论地表形态、浅层小构造、中深层逆掩断层以及深部高速顶都得到了很好的成像。其同相轴的连续性强,没有出现由于不能完全归位而出现的绕射现象,潜山两翼的构造成像明显,潜山下部的构造有一定程度的显示。测线左侧的断层以及右侧的凹陷都很好成像,波组对比明显。与图4-27的Gray,S.H.与Marfurt,K.J.的结果相比,整体效果相当,在局部上要优于他们的结果,特别是断点清晰。与图4-28中FFD法结果相比较可见,它的同相轴更为连续,绕射点点归位效果更好。但由于它是未经过任何处理的直接偏移成像,分辨率不如前者,特别是图形最上部出现了灰黑色阴影。分析阴影的形成可能是因为要作相关这一成像条件造成的,先天因素,只能通过改进成像方法才能消除噪音。
4.3 其它模型
在前面,主要介绍了逆时偏移的优势,下面再谈一下逆时偏移的不足之处。设计模型如下所示:
图4-30 简单模型的速度场
图4-18为所设计速度模型,图4-19为逆时偏移结果。在图4-18中,蓝色表示速度为800m/s的低速体;黄色表示速度为2000m/s的地质体;红色更强,表示速度为3000m/s 的地质体。由于3者速度差异较大,这就形成了强的反射界面,在成像结果中出现了大的阴影。那是由于低频噪声形成的,是逆时偏移方法本身原理的缺陷,自身不能消除,只能通过改进其成像方法消除。
图4-31 简单模型逆时偏移结果图
极值点偏移问题专题.(精选)
极值点偏移问题专题(0)——偏移新花样(拐点偏移) 例1已知函数()22ln f x x x x =++,若正实数1x ,2x 满足()()12+=4f x f x , 求证:122x x +≥。 证明:注意到()1=2f ,()()()12+=21f x f x f ()()()12+=21f x f x f ()2 =+210f x x x '+> ()22 =2f x x ''-+,()1=0f '',则(1,2)是()f x 图像的拐点,若拐点(1,2)也是()f x 的 对称中心,则有12=2x x +,证明122x x +≥则说明拐点发生了偏移,作图如下 想到了“极值点偏移”,想到了“对称化构造”,类似地,不妨将此问题命名为“拐点偏移”,仍可用“对称化构造”来处理. 不妨设1201x x <≤≤,要证 ()() 1221212 212x x x x f x f x +≥?≥-≥?≥- ()() ()() 11114242f x f x f x f x ?-≥-?≥+- ()()()2F x f x f x =+-,(]0,1x ∈,则 ()()()()222212212F x f x f x x x x x '''=--????=++-+-+ ? ?-????
() ( ) 1 4110 2 x x x ?? =--≥ ? ? - ?? , 得() F x在(]0,1上单增,有()()() 1214 F x F ≤=+=,得证。 2、极值点偏移PK拐点偏移常规套路 1、极值点偏移(()00 f x '=) 二次函数()() 12120 2 f x f x x x x =?+= 2、拐点偏移() () f x ''= ()()() 12 0120 22 f x f x f x x x x +=?+= 极值点偏移问题专题(1)——对称化构造(常规套路) 例1(2010 天津)已知函数()e x f x x- =. (1)求函数() f x的单调区间和极值; (2)已知函数() g x的图像与() f x的图像关于直线1 x=对称,证明:当1 x>时, ()() 12201 120 2 2 f x f x x x x x x x =?>- ?+> ()()() 120201 120 22 2 f x f x f x x x x x x x +=?>- ?+>
极值点偏移问题
极值点偏移问题总结 一、 判定方法 1、极值点偏移的定义 对于函数)(x f y =在区间),(b a 内只有一个极值点0x ,方程0)(=x f 的解分别为 21x x 、,且b x x a <<<21, (1)若 02 12x x x ≠+,则称函数)(x f y =在区间),(21x x 上极值点0x 偏移; (2) 若0212 x x x >+,则函数)(x f y =在区间),(21x x 上极值点0x 左偏,简称极值点0 x 左偏; (3)若02 12 x x x <+,则函数)(x f y =在区间),(21x x 上极值点0x 右偏,简称极值点0 x 右偏。 2、极值点偏移的判定定理 证明:(1)因为可导函数)(x f y =,在区间),(b a 上只有一个极大(小)值点0x ,则函数)(x f y =的单调递增(减)区间为),(0x a ,单调递减(增)区间为),(0b x ,又 b x x a <<<21,有 ),(221b a x x ∈+由于0)2('21>+x x f ,故),(2 02 1x a x x ∈+,所以02 1)(2 x x x ><+,即函数极大(小)值点0x 右(左)偏。
证明:(1)因为对于可导函数)(x f y =,在区间),(b a 上只有一个极大(小)值点0x ,则函数)(x f y =的单调递增(减)区间为),(0x a ,单调递减(增)区间为),(0b x ,又 b x x a <<<21,有01x x <,且0202x x x <-,又)2()(201x x f x f -<,故2012)(x x x -><,所以 02 1)(2 x x x ><+,即函数极大(小)值点0x 右(左)偏. 结论(2)证明略。 二、 运用判定定理判定极值点偏移的方法 1.方法概述: (1)求出函数()f x 的极值点; (2)构造一元差函数00()()()F x f x x f x x =+-- (3)确定函数()F x 的单调性; (4)结合(0)0F =,判断()F x 的符号,从而确定00(),()f x x f x x -+的大小关系。 2.抽化模型 答题模板:若已知函数()f x 满足12()()f x f x =,0x 为()f x 的极值点,求证:1202x x x +< (1)讨论函数()f x 的单调性并求出()f x 的极值点0x ; 假设此处()f x 在()0,x -∞上单调递减,在()0,x +∞ 上单调递增。 (2)构造00()()()F x f x x f x x =+--;
数字图像去噪典型算法仿真与分析
数字图像去噪典型算法仿真与分析 个人信息********* 摘要:图像去噪是数字图像处理中的重要环节和步骤。本文首先介绍了常见的图像噪声;然后,在介绍图像去噪的基本方法和原理的基础上,讨论了均值滤波、中值滤波和维纳滤波三种典型的图像去噪方法;最后,对包含有高斯噪声和椒盐等噪声的图像进行去噪,并对其去噪效果进行了仿真和分析比较,得出了三种方法各自的适用性特点。 关键词:图像去噪;均值滤波;中值滤波;维纳滤波 Simulation and Analysis of Image De-noising Methods in Digital Image Name:*** (个人信息****) Abstract: Image denoising is one of the most important parts and steps of image processing. Firstly, the paper introduces the common image noise. Then, based on the principle and methods of eliminating image noise, it discusses mean filtering, median filtering, and Wiener filtering which are typical image donoising. Finally, it uses these methods to eliminate image noise which contains Gaussian noise and salt&pepper noise. And through comparing and analyzing the effect of these methods, it concludes the applicability of each method in different application. Key words: image denoising; mean filtering; median filtering; Wiener filtering 0 引言 数字图像是现代人们获取信息的主要来源。由于成像系统、传输介质和记录设备等的不完善,数字图像在其形成、传输记录过程中往往会收到多种噪声的污染。一般来说,现实中的图像都是带噪图像。噪声使图像变得模糊,甚至淹没图
极值点偏移的判定方法
极值点偏移的判定方法和运用策略 一、判定方法 1、极值点偏移的定义 对于函数)(x f y =在区间),(b a 内只有一个极值点0x ,方程0)(=x f 的解分别为21x x 、,且b x x a <<<21,(1)若02 12 x x x ≠+,则称函数)(x f y =在区间),(21x x 上极值点0x 偏移;(2) 若 02 12 x x x >+,则函数)(x f y =在区间),(21x x 上极值点0x 左偏,简称极值点0x 左偏; (3)若02 1 2 x x x <+,则函数)(x f y =在区间),(21x x 上极值点0x 右偏,简称极值点0x 右偏。 2、极值点偏移的判定定理 判定定理1 对于可导函数)(x f y =,在区间),(b a 上只有一个极大(小)值点0x ,方程0)(=x f 的解分别为21x x 、,且b x x a <<<21,(1)若0)2 ( '2 1>+x x f ,则02 1)(2 x x x ><+,即函数)(x f y =在区间),(21x x 上极大(小)值点0x 右(左)偏;(2)0若0)2('21<+x x f ,则021)(2 x x x <>+,即函数)(x f y =在区间),(21x x 上极大(小)值点0x 左(右)偏。 证明:(1)因为可导函数)(x f y =,在区间),(b a 上只有一个极大(小)值点0x ,则函数)(x f y =的单调递增(减)区间为),(0x a ,单调递减(增)区间为),(0b x ,又 b x x a <<<21,有 ),(221b a x x ∈+由于0)2('21>+x x f ,故),(2 021x a x x ∈+,所以02 1)(2 x x x ><+,即函数极大(小)值点0x 右(左)偏。 结论(2)证明略。 判定定理2 对于可导函数)(x f y =,在区间),(b a 上只有一个极大(小)值点0x ,方程0)(=x f 的解分别为21x x 、,且b x x a <<<21,(1)若)2()(201x x f x f -<,则 02 1)(2x x x ><+, 即函数)(x f y =在区间),(21x x 上极大(小)值点0x 右(左)偏;(2)若)2()(201x x f x f ->,则 02 1)(2x x x <>+, 即函数)(x f y =在区间),(21x x 上极大(小)值
去噪算法的分析与实现
去噪算法的分析与实现 摘要为了进一步提高一些图像处理效果如边缘检测质量和适用性,也对噪声滤波处理进行了分析,实验结果标明,在去除椒盐噪声方面,中值滤波优于双边滤波;双边滤波对低频的噪声却有很好的效果;高斯滤波对高斯噪声有很好的处理效果;双边滤波用处理时间的代价换取了边缘磨平少的效果,而高斯滤波恰恰相反。 关键词噪声;滤波;图像处理 1 选题背景 图像的滤波重建是图像处理学的一个重要分支,早在20世纪40年代,N.Wiener就阐明了再平稳条件下的线性滤波理论,即Wiener滤波器理论,这些理论在控制领域得到了广泛的应用。但是Wiener要求储量大,计算的复杂度高,在后来的图像处理领域逐渐诞生了双边滤波,高斯滤波,中值滤波等算法。 优化边缘检测算法,加入了各种滤波算法,通过编写一些小的程序实现各种滤波的过程,这是优化图像的一种方式也是图像处理的一般步骤,滤波的目的是减少图像上噪声和失真,但是使用滤波算法或多或少都会减少边缘的强度,因而图像的增强和滤波之间是一个折衷的选择。滤波的图像效果会有些模糊,也称为模糊处理。 实现滤波的算法有很多种,CV_BLUR(简单滤波)、CV_BLUR_NO_SCALE (简单无缩放变换的滤波)、CV_MEDIAN(中值滤波)、CV_GAUSSIAN(高斯滤波)、CV_BILATERAL(双边滤波)。 2 主要滤波算法原理分析 2.1 高斯滤波 滤波算法中,周围局部领域的像素值决定了目标点的像素值。具体实现在2D高斯滤波中分别将不同的高斯权重值也就是加权平均之后得到的当前点的最后结果。然而此处的高斯权重因子是利用了两个像素之间的空间距离得出的。通过高速分布曲线我们可以看出,离目标像素越远的点对最终结果的贡献越小,反之则越大。 2.2 双边滤波 双边滤波是在高斯滤波中加入一部分权重来得到更好的处理效果,应用了卷积原理。先对其进行离散化,这个步骤是在处理前完成的。而且没有必要对每一个局部像素从整张图像上都用加权操作这个过程,从距离上,如果像素超了一定程度,其实实际上对目标像素的影响是非常非常小的,几乎可以忽略不计。
极值点偏移个人方法
方法一、指数对数不等式 适用范围:仅用于简单的对数与幂函数,指数与幂函数 优点:计算简单,一般几步就搞定 缺点:复杂的函数难以处理,一般不用此法,灵活性强,要注意加法与乘法之间的相互转换 常用结论: 2 21212121212 1212121212121212 21 12 2121212 ln 22)(ln ln 2 2 1)(2ln ln ) (ln ln ln ln ln ,ln 2ln ln e x x x x a a x x a x x a x x x x a x x a x x x x x x x x x x a x x ax x ax x e x x x x ax x a x x b a e e b a b a b a ab b a >?∴>∴=? >+=+∴>+∴+<=--∴+<--+=+==>?=>?--<+<--< 两式相加得 证:,证明:,有两个不同解例:则将乘法转化为加法 某常数技巧:若要证明 已知函数()()x f x xe x R -=∈ ,如果12x x ≠,且12()()f x f x = , 证明:12 2. x x +>
例2.已知函数x ae x x f -=)(有两个不同的零点12,x x ,求证:221>+x x . 3:设函数()x f x e ax a =-+ ()a R ∈,其图象与x 轴交于()()12,0,0A x B x 两点,且12x x <. 证明:0f ' < 【拓展提高】 4、已知函数()x f x e ax =-有两个零点12x x <,则下列说法错误的是( ) A. a e > B.122x x +>
图像去噪去噪算法研究 开题报告
图像去噪去噪算法研究论文开题报告 (1)选题的目的、意义 目的: 由于成像系统、传输介质和记录设备等的不完善,数字图像在其形成、传输记录过程中往往会受到多种噪声的污染,影响了图像的视觉效果,甚至妨碍了人们正常识别。另外,在图像处理的某些环节当输入的对象并不如预想时也会在结果图像中引入噪声。这些噪声在图像上常表现为—引起较强视觉效果的孤立象素点或象素块[1]。一般,噪声信号与要研究的对象不相关它以无用的信息形式出现,扰乱图像的可观测信息。要构造一种有效抑制噪声的滤波必须考虑两个基本问题能有效地去除目标和背景中的噪声;同时,也要能很好的保护图像目标的形状、大小及特定的几何和拓扑结构特征。 意义: 噪声的污染直接影响着对图像边缘检测、特征提取、图像分割、模式识别等处理,使人们不得不从各种角度进行探索以提高图像的质量[2] [3]。所以采用适当的方法尽量消除噪声是图像处理中一个非常重要的预处理步骤。现在图像处理技术已深入到科学研究、军事技术、工农业生产、医学、气象及天文学等领域。科学家利用人造卫星可以获得地球资源照片、气象情况;医生可以通过X射线或CT对人体各部位的断层图像进行分析。但在许多情况下图像信息会受到各种各样噪声的影响,严重时会影响图像中的有用信息,所以对图像的噪声处理就显得十分重要[4] [5]。图像去噪作为图像处理的一个重要环节,可以帮助人们更加准确地获得我们所需的图像特征,使其应用到各个研究领域,帮助解决医学、物理、航天、文字等具体问题。如何改进图像去噪算法,以有效地降低噪声对原始图像的干扰程度,并且增强视觉效果,提高图像质量,使图像更逼真,仍存在继续研究的重要意义。 (2)国内外对本课题涉及问题的研究现状 针对图像去噪的经典算法,科学工作者通过努力,提出了一些的改进算法,比如模拟退火法[6]。但是模拟退火法存在的问题是计算过程复杂,计算量大,即使使用计算机代替人工计算也会耗用大量时间。后来在众多研究者的努力下,产生了很多其他不同的方法。而现今已卓有成效的非线性滤波方法有正则化方法、最小能量泛函方法、各向异性扩散法[7] [8]。 目前常用的降噪方法有在空间域进行的,也有将图像数据经过傅里叶等变换以后转到频域中进行的[9]。其中频域里的滤波需要涉及复杂的域转换运算,相对而言硬件实现起来会耗费更多的资源和时间。在空间域进行的方法有均值或加权后均值滤波、中值或加权中值滤波、最小均方差值滤波和均值或中值的多次迭代等。实践证明,这些方法虽有一定的降噪效果,但都有其局限性。比如加权均值在细节损失上非常明显;而中值仅对脉冲干扰有效,对高斯噪声却无能为力[10] [11] [12] [13]。实上,图像噪声总是和有效数据交织在一起,若处理不当,就会使边界轮廓、线条等变得模糊不清,反而降低了图像质量。 对于去除椒盐噪声,主要使用中值滤波算法。中值滤波是在1970年由Tukey提出的一种一维滤波器。它主要是指用实心邻域范围内的所有值的中值代替所作用的点值,但是必须注意的是邻域内的点的个数是正奇数,这是为了保证取中值的便利性,若是偶数,则中值就会产生两个[14] [15]。中值滤波以一种简单的非线性平滑技术。它是以排序统计理论作为基础,有效抑制噪声的非线性处理数字信号技术。中值滤波对消除椒盐噪声非常有效。在图像处理中,常用中值滤波保护图像边缘信息,它是一种经典的去除图像噪声算法[16]。但是它在去除图像噪声过程中,往往会将图像的细节比如细线、棱角的地方破坏掉。后来
(完整版)极值点偏移问题专题.docx
极值点偏移问题专题(0 )——偏移新花样(拐点偏移) 例 1 已知函数f x2ln x x2x ,若正实数x1,x2满足 f x1 +f x2 =4 ,求证 : x1x2 2 。 证明:注意到 f1=2 , f x1 +f x2=2f 1 f x1 +f x2=2f1 f x =2 10 +2x x f x =2 2 , f 1 =0 ,则(1,2)是 f x 图像的拐点,若拐点(1,2)也是 f x 的x2 对称中心,则有x1x2 =2 ,证明 x1x2 2 则说明拐点发生了偏移,作图如下 想到了“极值点偏移”,想到了“对称化构造”,类似地,不妨将此问题命名为“拐点偏移”,仍可用“对称化构造”来处理. 不妨设 0 x11x2,要证 x1x22 x22x11 f x2f 2 x1 4f x1f2x1 4f x1f2x1 F x f x f2x, x0,1 ,则 F x f x f2x 2 2x12 2 2x 1 x2x
1 , 4 1 x 1 0 x 2x 得 F x 在 0,1上单增,有 F x F 1 2 1 4 ,得证。 2 、极值点偏移PK 拐点偏移常规套路 1 、极值点偏移( f x00 ) 二次函数 f x1 f x2x1x22x0f x 1 f x 2 x 2 2x x 1 x1x22x0 2 、拐点偏移 f x00 f x1 f x2 2 f x0 f x1 f x2 2 f x0x2 2x0 x1 x1 x2 2x0 x2 2x0 x1 极值点偏移问题专题( 1 )——对称化构造(常规套路) 例 1 ( 2010 天津)已知函数 f x xe x. (1)求函数f x的单调区间和极值; (2)已知函数g x的图像与f x的图像关于直线x 1对称,证明:当x 1时,
图像椒盐噪声与高斯噪声去噪方法研究
德州学院毕业论文开题报告书 2011年3月16日院(系)物理系专业电子信息工程 姓名田程程学号200700802041 论文题目图像椒盐噪声与高斯噪声去噪方法研究 一、选题目的和意义 图像去噪的最终目的是改善给定的图像,解决实际图像由于噪声干扰而导致图像质量下降的问题。通过去噪技术可以有效地提高图像质量,增大信噪比,更好的体现原来图像所携带的信息,作为一种重要的预处理手段,人们对图像去噪算法进行了广泛的研究。在现有的去噪算法中,有的去噪算法在低维信号图像处理中取得较好的效果,却不适用于高维信号图像处理;或者去噪效果较好,却丢失部分图像边缘信息,或者致力于研究检测图像边缘信息,保留图像细节。如何在抵制噪音和保留细节上找到一个较好的平衡点,成为近年来研究的重点。 二、本选题在国内外的研究现状和发展趋势 随着各种数字仪器和数码产品的普及,图像和视频已成为人类活动中最常用的信息载体,它们包含着物体的大量信息,成为人们获取外界原始信息的主要途径。然而在图像的获取、传输和存贮过程中常常会受到各种噪声的干扰和影响而使图像降质,并且图像预处理算法的好坏又直接关系到后续图像处理的效果,如图像分割、目标识别、边缘提取等,所以为了获取高质量数字图像,很有必要对图像进行降噪处理,尽可能的保持原始信息完整性(即主要特征)的同时,又能够去除信号中无用的信息。所以,降噪处理一直是图像处理和计算机视觉研究的热点。
三、课题设计方案 本设计为图像椒盐噪声与高斯噪声去噪方法研究 一、研究高斯噪声和椒盐噪声特性 二、研究去噪算法,提出适合去除高斯噪声和椒盐噪声的算法 三、计算机仿真 四、计划进度安排 第一周至第二周:根据寒假期间针对论文题目收集的有关资料,认真分析和整理资料,形成撰写论文的大体框架。对论文的撰写形成明确地认识,认真书写开题报告,完成开题报告并上交。 第三周至第五周:学习和研究图像椒盐噪声与高斯噪声去噪方法。 第六周至第十一周:对前期的关于图像椒盐噪声与高斯噪声去噪方法的研究进行总结。 第十二周:根据论文指导意见和建议对论文进行修改和完善后形成论文终稿。
极值点偏移定义及判定定理
极值点偏移定义及判定定理 所谓极值点偏移问题,是指对于单极值函数,由于函数极值点左右的增减速度不同,使得函数图像没有对称性。若函数在处取得极值,且函数与直线()f x 0x x =()y f x =y b =交于,两点,则的中点为,而往往.如下图1(,)A x b 2(,)B x b AB 12( ,)2x x M b +1202 x x x +≠所示. 极值点没有偏移 一、极值点偏移判定方法 1、极值点偏移的定义 对于函数在区间内只有一个极值点,方程的解分别为)(x f y =),(b a 0x 0)(=x f ,且,(1)若 ,则称函数在区间上极21x x 、b x x a <<<210212x x x ≠+)(x f y =),(21x x 值点偏移;(2) 若,则函数在区间上极值点左偏,简0x 0212 x x x >+)(x f y =),(21x x 0x 称极值点左偏; (3)若,则函数在区间上极值点右0x 0212 x x x <+)(x f y =),(21x x 0x 偏,简称极值点右偏。 0x 2、极值点偏移的判定定理 判定定理: 对于可导函数,在区间上只有一个极大(小)值点 )(x f y =),(b a ,方程的解分别为,且,(1)若,则0x 0)(=x f 21x x 、b x x a <<<210)2('21>+x x f ,即函数在区间上极大(小)值点右(左)偏;(2)0021)(2 x x x ><+)(x f y =),(21x x 0x 若,则,即函数在区间上极大(小)值点0)2('21<+x x f 021)(2 x x x <>+)(x f y =),(21x x 左(右)偏。 0x
matlab图像去噪算法设计(精)只是分享
数字图像去噪典型算法及matlab实现 希望得到大家的指点和帮助 图像去噪是数字图像处理中的重要环节和步骤。去噪效果的好坏直接影响到后续的图像处理工作如图像分割、边缘检测等。图像信号在产生、传输过程中都可能会受到噪声的污染,一般数字图像系统中的常见噪声主要有:高斯噪声(主要由阻性元器件内部产生)、椒盐噪声(主要是图像切割引起的黑图像上的白点噪声或光电转换过程中产生的泊松噪声)等; 目前比较经典的图像去噪算法主要有以下三种: 均值滤波算法:也称线性滤波,主要思想为邻域平均法,即用几个像素灰度的平均值来代替每个像素的灰度。有效抑制加性噪声,但容易引起图像模糊,可以对其进行改进,主要避开对景物边缘的平滑处理。 中值滤波:基于排序统计理论的一种能有效抑制噪声的非线性平滑滤波信号处理技术。中值滤波的特点即是首先确定一个以某个像素为中心点的邻域,一般为方形邻域,也可以为圆形、十字形等等,然后将邻域中各像素的灰度值排序,取其中间值作为中心像素灰度的新值,这里领域被称为窗口,当窗口移动时,利用中值滤波可以对图像进行平滑处理。其算法简单,时间复杂度低,但其对点、线和尖顶多的图像不宜采用中值滤波。很容易自适应化。 Wiener维纳滤波:使原始图像和其恢复图像之间的均方误差最小的复原方法,是一种自适应滤波器,根据局部方差来调整滤波器效果。对于去除高斯噪声效果明显。实验一:均值滤波对高斯噪声的效果 I=imread('C:\Documents and Settings\Administrator\桌面\1.gif');%读取图像 J=imnoise(I,'gaussian',0,0.005);%加入均值为0,方差为0.005的高斯噪声 subplot(2,3,1);imshow(I); title('原始图像'); subplot(2,3,2); imshow(J); title('加入高斯噪声之后的图像'); %采用MATLAB中的函数filter2对受噪声干扰的图像进行均值滤波 K1=filter2(fspecial('average',3),J)/255; %模板尺寸为3 K2=filter2(fspecial('average',5),J)/255;% 模板尺寸为5 K3=filter2(fspecial('average',7),J)/255; %模板尺寸为7 K4= filter2(fspecial('average',9),J)/255; %模板尺寸为9 subplot(2,3,3);imshow(K1); title('改进后的图像1'); subplot(2,3,4); imshow(K2); title('改进后的图像2');
(完整版)极值点偏移问题的两种常见解法之比较
极值点偏移问题的两种常见解法之比较 浅谈部分导数压轴题的解法 在高考导数压轴题中,不断出现极值点偏移问题,那么,什么是极值点偏移问题?参考陈宽宏、邢友宝、赖淑明等老师的文章,极值点偏移问题的表述是:已知函数()y f x =是连续函数,在区间12(,)x x 内有且只有一个极值点0x ,且 12()()f x f x =,若极值点左右的“增减速度”相同,常常有极值点12 02 x x x += ,我们称这种状态为极值点不偏移;若极值点左右的“增减速度”不同,函数的图象不具有对称性,常常有极值点12 02 x x x +≠ 的情况,我们称这种状态为“极值点偏移”. 极值点偏移问题常用两种方法证明:一是函数的单调性,若函数()f x 在区间(,)a b 内单调递增,则对区间(,)a b 内的任意两个变量12x x 、, 1212()()f x f x x x . 二是利用“对数平均不等式”证明,什么是“对数平均”?什么又是“对数平均不等式”? 两个正数a 和b 的对数平均数定义:,,(,)ln ln ,,a b a b L a b a b a a b -?≠? =-??=? 对数平均数与算术平均数、 (,)2 a b L a b +≤≤,(此式记为对数平均不等式) 下面给出对数平均不等式的证明: i )当0a b =>时,显然等号成立 ii )当0a b ≠>时,不妨设0a b >>, ① ln ln a b a b -< -, ln ln a b a b --, 只须证:ln a b <, 1x =>,只须证:1 2ln ,1x x x x ≤-> 设1 ()2ln ,1f x x x x x =-+>,则222 21(1)()10x f x x x x -'=--=-<,所以()f x
极值点偏移定义及判定定理
1极值点偏移定义及判定定理 所谓极值点偏移问题,是指对于单极值函数,由于函数极值点左右的增减速 度不同,使得函数图像没有对称性。若函数()f x 在0x x =处取得极值,且函数 ()y f x =与直线y b =交于1(,)A x b ,2(,)B x b 两点,则AB 的中点为12(,)2 x x M b +,而往往1202 x x x +≠.如下图所示. 极值点没有偏移 一、极值点偏移判定方法 1、极值点偏移的定义 对于函数)(x f y =在区间),(b a 内只有一个极值点0x ,方程0)(=x f 的解分别为21x x 、,且b x x a <<<21,(1)若 0212x x x ≠+,则称函数)(x f y =在区间),(21x x 上极值点0x 偏移;(2) 若0212 x x x >+,则函数)(x f y =在区间),(21x x 上极值点0x 左偏,简称极值点0x 左偏; (3)若0212 x x x <+,则函数)(x f y =在区间),(21x x 上极值点0x 右偏,简称极值点0x 右偏。 2、极值点偏移的判定定理 判定定理,对于可导函数)(x f y =,在区间),(b a 上只有一个极大(小)值点0x ,方程0)(=x f 的解分别为21x x 、,且b x x a <<<21,(1)若0)2( '21>+x x f ,则021)(2 x x x ><+,即函数)(x f y =在区间),(21x x 上极大(小)值点0x 右(左)偏;(2)0若0)2('21<+x x f ,则021)(2 x x x <>+,即函数)(x f y =在区间),(21x x 上极大(小)值点0x 左(右)偏。
心音去噪的研究与实现
心音去噪的研究与实现 心音是最重要的信号之一。然而,许多外界因素会影响心音信号的采集。心音是弱电气信号以至很弱的外部噪声就能导致信号中的病理和生理信息的错误判断,从而导致疾病的错诊。因此对心音信号去噪的研究非常重要。 本文提出了一种基于matlab的更系统的心音去噪的研究与分析。基于matlab的心音去噪的研究首先应用matlab的强大的图像处理功能将含噪心音信号变换到小波域,用小波变换在母粒的层次上对其进行分解,并采用软阈值函数的小波变换阈值法去噪,得到小波分解系数,采用这样的方法信号的去噪效果显著改善了。根据小波分解得到的各段分解系数,利用小波变换合成重构信号。最后,本文是使用陷波滤波器消除50HZ的工频和35HZ的机电干扰信号。 引言 心音信号是用于检测心脏性能,获取生理和病理信息的重要信号之一。然而,在心音信号的采集过程中不可避免的会受到周围噪音的影响,比如电磁干扰,工频噪声,由人本身的呼吸、肺音产生的电干扰等。因此,我们采集到的是混合信号。有时噪声信号会严重干扰有效信号,造成有效信号的丢失,这对于提取相应的病理信息是及其不利的。为了减少有用信息的缺失,去噪是采集信号中的至关重要的过程。心音信号去噪旨在消除干扰信号保留有效信号。 1.1研究的背景 国外稍早于国内开始研究心音信号的去噪。Liang H,Lukkarinens,Hartimo I在1997年提出了基于信号包络图的心音分段算法,采用了小波的分解与重构,使用shannon平均能量包络计算,选定阈值,找出峰值点位置,利用小波变换识别S1和S2。Hebden等主要运用统计学原理和神经网络识别S1和S2。由于识别过程不需要同时记录心音图作为参考信号,不仅节省了存储空间,也免于了隔离设备的限制,更重要的是,在某种程度上节约了费用。另外,从2005年起如何提取第三心音S3成为了研究热点。由于低振幅、低频率、持续时间短,提取S3成了个难题。提取S1和S2的方法可以获得准确的结果但计算比较复杂且不适用于S3。Kumar等首先采用小波阈值变换过滤从含噪心音中分离出S1,S2,和S3,然后使用高频标记和识别S3。 在中国,心音分析仍处于初级阶段,时间频率分析已应用于心音信号的处理。现阶段已经完成了信号的线性分析(短时傅里叶变换,小波变换和Garbo expanding)非线性时频分析(winger-Ville分布, 科恩分布和时频分布级数),提出了心音信号处理的应用和研究。然而,心音信号去噪仍停留在硬件去噪水平。 1.2研究的价值 心音信号包含了心脏各部分的心理病理信息.更重要的是心音信号易被心血管疾病影响,心音信号检测是心血管疾病无创性检测的重要方法。 在采集心音信号的过程中,心音信号易受外界噪声的干扰(人本身呼吸的声音,皮肤摩擦的声音,工频噪声(50HZ),机电干扰(35HZ)和外部环境的高斯白噪声)。这样的情况下部分有用的心音信号就丢失了,导致诊断疾病的准确性和精度降低了。传统的去噪方法仅使用硬件去噪,但去噪效果不尽人意。更糟糕的是,硬件去噪中频率干扰很容易被引入。本文提出matlab编程去噪算法,最小化有效信息的损失,以便更有效地消除噪声。 2.心音数据库的建设 研究基于matlab的心音去噪,去噪需采用不同类型的心音信号。我们数据库里,心音去噪包括正常心音和非正常心音数据库。前者包括正常心音信号,快速的心跳声音,心底和心尖部正常心音。后者则包括第二心音的重叠率的分裂、减弱、增强,第一心音的分裂、减
常用图像去噪方法比较及其性能分析
常用图像去噪方法比较及其性能分析 发表时间:2019-03-15T15:13:24.833Z 来源:《信息技术时代》2018年6期作者:孟靖童王靖元[导读] 本文介绍了噪声的分类模型,之后又分别介绍了空间域去噪、傅里叶去噪算法以及小波去噪中的部分算法,并分别对相似算法进行了分析比较。 (国际关系学院,北京 100091) 摘要:本文介绍了噪声的分类模型,之后又分别介绍了空间域去噪、傅里叶去噪算法以及小波去噪中的部分算法,并分别对相似算法进行了分析比较。同时为了更好的比较出各算法之间的去噪差别针对其中部分去噪算法进行了用matlab的实现,比较了去噪的效果。关键词:数字图像;噪声;滤波 一、引言 随着当今社会数字化的普及,人们传递图像信息的方式已经从之前单纯的实物传递变为当今的数字图像的传递。然而由于各种原因会导致数字图像真实性减弱。针对这种问题,数字图像处理技术应运而生。数字图像处理技术的产生,不仅满足了人们的视觉,同时经过处理的图像还可以更好的应用于图像加密,图像识别等领域。 二、空间域去噪算法 (一)均值滤波去噪 通过计算某一滤波目标区域内的算数平均值来替代目标区域中心所对应的像素值的方法来达到去除噪声的目的。而加权均值滤波则是在原有均值滤波的基础上,通过对某些更趋进于真实像素的点进行加权的方法来达到更好的去噪效果,使最终区域中心像素更加趋近于真实像素。 利用均值滤波可以很好的去除由高斯噪声带来的对于图像的影响,然而对于由于椒盐噪声带来的对于图像的影响,均值滤波去除的效果并不很好。同时,由于均值滤波的算法是通过取目标范围内一小区域中点灰度值的平均值,来决定区域中心点灰度值的,所以不可避免的造成图像经过均值滤波后会导致图像部分原始真实细节被滤掉,造成视觉上细节不清楚的情况。并且所取范围越大,图像中细节部分越不清晰,图像越平滑。 (二)中值滤波去噪 通过求区域中心点及其周围点灰度值的中值,来代替该中心点的灰度值。因此利用中值去噪的方法可以较好的弥补均值滤波对于图像边缘不清晰处理的缺点。然而由于中值滤波对于所选滤波区域的选择要求较高,因此对于滤波区域大小形状的选择需要根据具体图像来确定。此外,与均值滤波相比,中值滤波对于椒盐噪声的处理比对于高斯噪声的处理更好。(三)维纳滤波去噪 维纳滤波通过寻找一个滤波模型使得被过滤后图像与原图像的均方差最小。因此维纳滤波的去噪效果随局部方差的增大而减弱。与邻域均值滤波法相比,维纳滤波可以更好的处理高斯噪声带来的对于图片的影响。同时,由于维纳滤波法是一种自适应的滤波器,所以较邻域滤波可以更好的处理图像边缘的细节。然而维纳滤波却无法很好的处理信噪比较低的图像信号。实验中发现,维纳滤波在处理完运动模糊图像后会出现较严重类似于高斯噪声的影响,加入中值去噪得到更清晰图像,同时可以与最后一张仅添加中值去噪图片做对比。 三、基于傅里叶变换图像去噪 傅里叶变换图像去噪利用了图像与噪声主要分布频段不同的特点,即图像信息大多分布在低频段及中频段,而噪声则是分布在高频段。通过衰减信号的高频段来减弱噪声对于图像的影响。 其算法可表示为: G(μ,v)=H(μ,v)F(μ,v) 其中F(μ,v)为f(μ,v)经傅里叶变换得到,通过函数H(μ,v)衰减高频分量后的F(μ,v)得到输出G(μ,v),之后只需对其进行傅里叶逆变换即可得到去早后图像g(x,y)。 此算法可简单表述为: (1)把原图像通过傅里叶变换从空间域变到频域; (2)对变换到频域的图像进行一定程度的衰减,具体衰减方法根据原图像实际情况而定;(3)对处理后图像从频率域经傅里叶逆变换得到去噪后图像。 经由傅里叶变换去噪可得出低通滤波器及巴特沃斯低通滤波器。 (一)理想低通滤波器 理想低通滤波器仅允许低频信号通过,因此大部分高频噪声被截止,从而达到去噪的效果。理想低通滤波器设计原理简单,且去噪效果理想,然而由于理想低通滤波器的原理是完全滤掉高频信息,因此导致经处理后图像边缘模糊,同时会出现较严重的振铃现象。(二)巴特沃斯低通滤波 相比于理想低通滤波器,巴特沃斯低通滤波器对于信号选择通过和不通过的频率之间并没有明显的不连续界限,因此可以缓解理想低通滤波器图像边缘模糊的缺点。 同时巴特沃斯低通滤波器的振铃现象会随其公式阶数的增加而明显增强。 四、基于小波变换的图像去噪方法 (一)小波系数收缩法 小波系数收缩法可分为小波阈值收缩法和小波比例收缩法两类。
(完整版)导数压轴题分类(2)---极值点偏移问题(含答案)
导数压轴题分类(2)---极值点偏移问题 极值点偏移问题常见的处理方法有⑴构造一元差函数()()()x x f x f F --=02x 或者 ()()()x x f x x f x F --+=00。其中0x 为函数()x f y =的极值点。⑵利用对数平均不等式。 2 ln ln ab b a b a b a +< --< 。⑶变换主元等方法。 任务一、完成下面问题,总结极值点偏移问题的解决方法。 1.设函数2 2 ()ln ()f x a x x ax a R =-+-∈ (1)试讨论函数()f x 的单调性; (2)()f x m =有两解12,x x (12x x <),求证:122x x a +>. 解析:(1)由2 2 ()ln f x a x x ax =-+-可知 2222(2)()()2a x ax a x a x a f x x a x x x --+-'=-+-== 因为函数()f x 的定义域为(0,)+∞,所以 ① 若0a >时,当(0,)x a ∈时,()0f x '<,函数()f x 单调递减, 当(,)x a ∈+∞时,()0f x '>,函数()f x 单调递增; ② 若0a =时,当()20f x x '=>在(0,)x ∈+∞内恒成立,函数()f x 单调递增; ③ 若0a <时,当(0,)2 a x ∈-时,()0f x '<,函数()f x 单调递减, 当(,)2 a x ∈- +∞时,()0f x '>,函数()f x 单调递增; (2)要证122x x a +>,只需证12 2 x x a +>, (x)g =22 2(x)2,g (x)20(x)(x)a a f x a g f x x '''=-+-=+>∴=则为增函数。 只需证:12 x x ( )()02 f f a +''>=,即证()2121221212221+0+0a x x a x x a x x x x a -+->?-+->++(*) 又2222 111222ln ,ln ,a x x ax m a x x ax m -+-=-+-=两式相减整理得:
极值点偏移 极值点偏移定理
极值点偏移1-2---极值点偏移判定定理 一、极值点偏移的判定定理 对于可导函数)(x f y =,在区间),(b a 上只有一个极大(小)值点0x ,方程0)(=x f 的解分别为21,x x ,且b x x a <<<21, (1)若)2()(201x x f x f -<,则021)(2x x x ><+,即函数)(x f y =在区间),(21x x 上极(小)大值点0x 右(左)偏; (2)若)2()(201x x f x f ->,则 021)(2x x x <>+,即函数)(x f y =在区间),(21x x 上极(小)大值点0x 右(左)偏. 证明:(1)因为对于可导函数)(x f y =,在区间),(b a 上只有一个极大(小)值点0x ,则函数)(x f 的单调递增(减)区间为),(0x a ,单调递减(增)区间为),(0b x ,由于b x x a <<<21,有01x x <,且0202x x x <-,又)2()(201x x f x f -<,故2012)(x x x -><,所以 021)(2 x x x ><+,即函数极(小)大值点0x 右(左)偏; (2)证明略. 左快右慢(极值点左偏221x x m +?)
左快右慢(极值点左偏221x x m +?) 二、运用判定定理判定极值点偏移的方法 1、方法概述: (1)求出函数)(x f 的极值点0x ; (2)构造一元差函数)()()(00x x f x x f x F --+=; (3)确定函数)(x F 的单调性; (4)结合0)0(=F ,判断)(x F 的符号,从而确定)(0x x f +、)(0x x f -的大小关系. 口诀:极值偏离对称轴,构造函数觅行踪;四个步骤环相扣,两次单调紧跟随. 2、抽化模型 答题模板:若已知函数)(x f 满足)()(21x f x f =,0x 为函数)(x f 的极值点,求证:0212x x x <+. (1)讨论函数)(x f 的单调性并求出)(x f 的极值点0x ; 假设此处)(x f 在),(0x -∞上单调递减,在),(0+∞x 上单调递增. (2)构造)()()(00x x f x x f x F --+=; 注:此处根据题意需要还可以构造成)2()()(0x x f x f x F --=的形式. (3)通过求导)('x F 讨论)(x F 的单调性,判断出)(x F 在某段区间上的正负,并得出)(0x x f +与)(0x x f -的大小关系; 假设此处)(x F 在),0(+∞上单调递增,那么我们便可得出0)()()()(000=-=>x f x f x F x F ,从而得到:0x x >时,)()(00x x f x x f ->+. (4)不妨设201x x x <<,通过)(x f 的单调性,)()(21x f x f =,)(0x x f +与)(0x x f -的大小关系得出结论;
高考数学压轴题归纳总结及解题方法专题讲解3---不含参数的极值点偏移问题
高考数学压轴题归纳总结及解题方法专题讲解 函数的极值点偏移问题,其实是导数应用问题,呈现的形式往往非常简洁,涉及函数的双零点,是一个多元数学问题,不管待证的是两个变量的不等式,还是导函数的值的不等式,解题的策略都是把双变量的等式或不等式转化为一元变量问题求解,途径都是构造一元函数. 例.(2010天津理)已知函数()()x f x xe x R ?=∈ ,如果12x x ≠,且12()()f x f x =. 证明:12 2.x x +> 构造函数()(1)(1),(0,1]F x f x f x x =+??∈, 则0)1()1(')1(')('21>?=??+=+x x e e x x f x f x F , 所以()F x 在(0,1]x ∈上单调递增,()(0)0F x F >=, 也即(1)(1)f x f x +>?对(0,1]x ∈恒成立.
由1201x x <<<,则11(0,1]x ?∈, 所以11112(1(1))(2)(1(1))()()f x f x f x f x f x +?=?>??==, 即12(2)()f x f x ?>,又因为122,(1,)x x ?∈+∞,且()f x 在(1,)+∞上单调递减, 所以122x x ?<,即证12 2.x x +> 法三:由12()()f x f x =,得1212x x x e x e ??=,化简得2121x x x e x ?=… , 不妨设21x x >,由法一知,1201x x <<<. 令21t x x =?,则210,t x t x >=+,代入 式,得11 t t x e x += , 反解出11t t x e =?,