电脑风扇的结构和调速原理祥解

风扇是目前电脑中最常用的一种强制冷却设备。风扇由电机、轴承、叶片和壳体几个部分构成。电机是风扇的动力来源,风扇的转速高低、劲头大小都取决于电机的性能。普通风扇一般只几元钱一只,而一些高档风扇却卖几百元一只。价格上的巨大差异,并不因为轴承类型和扇叶形状、气流方向等方面,而主要因为风扇电机性能上的差异,一台好的风扇关键是有一台好的电机。例如,Tt出品的金星12型风扇转速可在2000~5500rpm之间进行无级变速。序列号为A1745的散热风扇,连同散热片及调速器一起售价高达480元人民币(如图1)。
图1 金星12型风扇套件
高档风扇的控制功能很强(如图2),电机的结构也较为复杂。由于风扇电机的技术含量越来越高,如果对其细节不甚了解,就难以正确地安装和使用。因此,本文重点对风扇中所使用的电机进行剖析。
图2 金星12型风扇的外观
一、直流电机的基本工作原理
根据供电方式的不同,电机有直流电机和交流电机两种类型。电脑中使用的风扇电机为直流电机,供电电压为+12V,转速在1000~10000转/分之间。
直流电机是将直流电能转换为机械能的旋转机械。它由定子、转子和换向器三个部分组成,如图3。
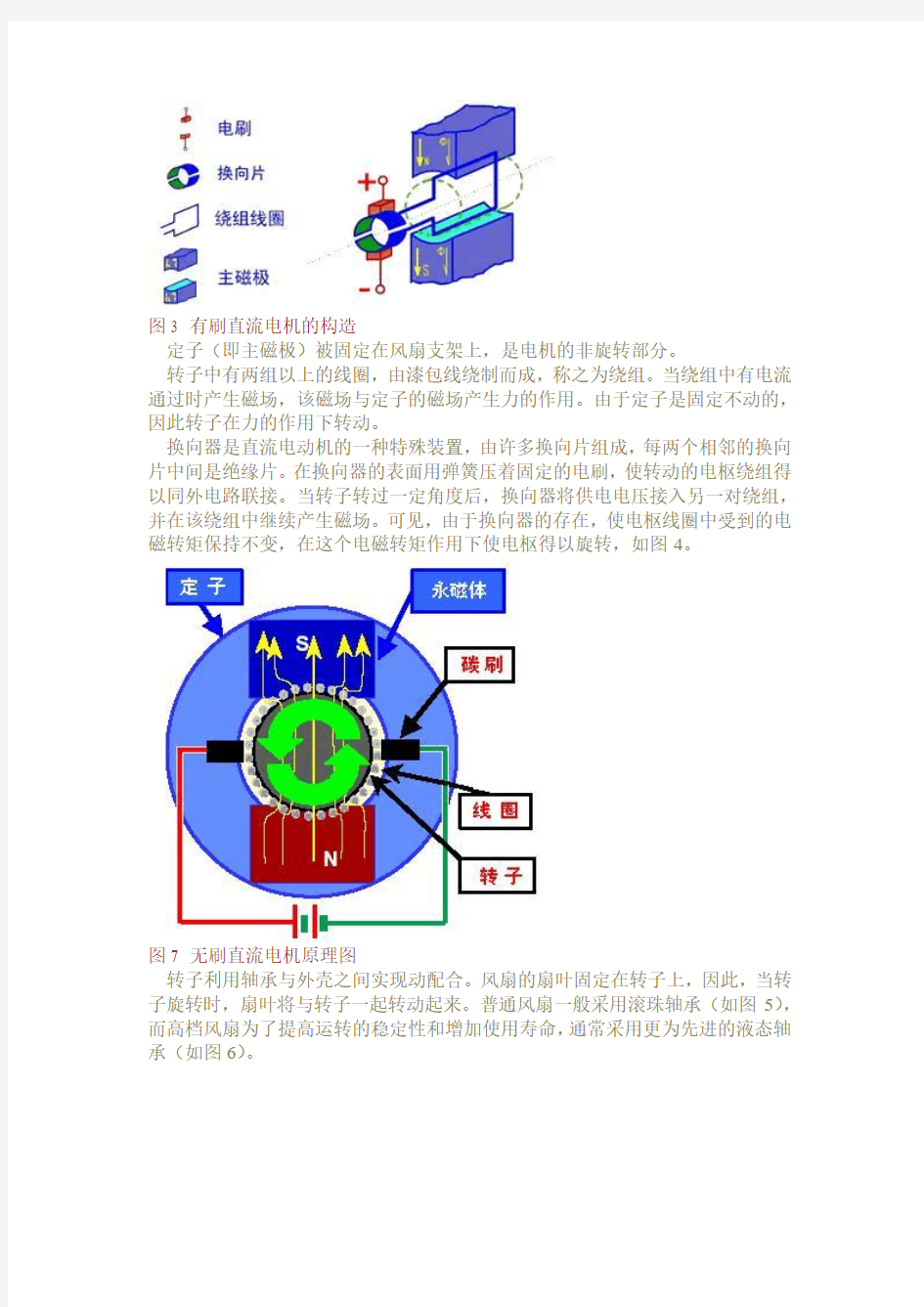
图3 有刷直流电机的构造
定子(即主磁极)被固定在风扇支架上,是电机的非旋转部分。
转子中有两组以上的线圈,由漆包线绕制而成,称之为绕组。当绕组中有电流通过时产生磁场,该磁场与定子的磁场产生力的作用。由于定子是固定不动的,因此转子在力的作用下转动。
换向器是直流电动机的一种特殊装置,由许多换向片组成,每两个相邻的换向片中间是绝缘片。在换向器的表面用弹簧压着固定的电刷,使转动的电枢绕组得以同外电路联接。当转子转过一定角度后,换向器将供电电压接入另一对绕组,并在该绕组中继续产生磁场。可见,由于换向器的存在,使电枢线圈中受到的电磁转矩保持不变,在这个电磁转矩作用下使电枢得以旋转,如图4。
图7 无刷直流电机原理图
转子利用轴承与外壳之间实现动配合。风扇的扇叶固定在转子上,因此,当转子旋转时,扇叶将与转子一起转动起来。普通风扇一般采用滚珠轴承(如图5),而高档风扇为了提高运转的稳定性和增加使用寿命,通常采用更为先进的液态轴承(如图6)。
图5 滚珠轴承
图6 液态轴承的结构
二、有刷电机与无刷电机
如前所述,直流电机是利用碳刷实现换向的。由于碳刷存在摩擦,使得电刷乃至电机的寿命减短。同时,电刷在高速运转过程中会产生火花,还会对周围的电子线路形成干扰。为此,人们发明了一种无需碳刷的直流电机,通常也称作无刷电机(brushless motor)。
无刷电机将绕组作为定子,而永久磁铁作为转子(如图7),结构上与有刷电机正好相反。无刷电机采用电子线路切换绕组的通电顺序,产生旋转磁场,推动转子做旋转运动。
图7 无刷直流电机原理图
无刷电机由于没有碳刷,无需维护寿命长,速度调节精度高。因此,无刷电机正在迅速取代传统的有刷电机,带变频技术的家用电器(如变频空调、变频电冰箱等)就是使用了无刷电机,目前散热风扇中几乎全部使用无刷电机。
三、变频电机工作原理
图8(a)是拆开的风扇电机的照片,风扇采用的是变频电机,这从线圈所在的位置就可以辨认出来。图8(b)是变频电机控制电路板,控制芯片将集DSP 功能与驱动器于一体,简化了电路结构。通过对控制芯片编程,可改变电机转速。
图8 直流电机的构造
变频电机具有直流电机特性、却采用交流电机的结构。也就是说,虽然外部接入的是直流电,却采用直流-交流变压变频器控制技术,电机本体完全按照交流电机的原理去工作的。因此,变频电机也叫“自控变频同步电机”,电动机的转速n取决于控制器的所设定的频率f。
图9是三相星形接法的变频电机控制电路,直流供电经MOS管组成的三相变流电路向电机的三个绕组分时供电。每一时刻,三对绕组中仅有一对绕组中有电流通过,产生一个磁场,接着停止向这对绕组供电,而给相邻的另一对绕组供电,
这样定子中的磁场轴线在空间转动了120°,转子受到磁力的作用跟随定子磁场作120°旋转。将电压依次加在A B-、A C-、B C-、B A-、C A-、C B-上,定子中便形成旋转磁场,于是电机连续转动。
图9 无刷直流电机工作原理
变频电机的驱动电路由主回路和控制回路两部分组成,现在已经将这两部分集成到同一个芯片中,这样只要使用一个器件便可实现变频电机的全部控制功能,简化了电路结构,常用的控制芯片有日本三洋公司的LB1964、美国MAXIM公司的MAX6625、和意法半导体公司的ST72141等。随着工业界对节能和噪声抑制的日益重视,许多工业产品都趋向采用无刷电机,对电机微控制器提出了更高要求。作为新一代电机控制DSP芯片,TI公司高性价比的TMS320C240 非常适合于完成这一任务。
四、变频电机的电路组成
为了对风扇电机的运行状况进行监控,需要从风扇电机向主板输出速度信号,实现风扇运行情况的监控。监控电路用来显示风扇转速,并可实现报警和电脑的自动停机,以防止因风扇停转而烧毁CPU或其它器件的情况出现。现在变频电机普遍采用集成功率器件来实现这一功能,使控制线路大为简化。
为了实现精确控制效果,必须向集成功率器件输入反映转子位置的信号,因此变频电机必须具有电机位置反馈机制。目前通常使用霍尔元件或和光电传感器两种手段进行位置和转速检测。
霍尔器件是一种基于霍尔效应的磁传感器,霍尔效应是美国科学家爱德文·霍尔于1879年发现的。目前,使用霍尔效应的磁传感器产品已得到广泛的应用。图10为霍尔效应原理图。在一块通电的半导体薄片上,加上和片子表面垂直的磁场B,在薄片的横向两侧会出现一个电压(图中的Vh称为霍尔电压)。
图10 霍尔效应
变频电机利用霍尔器件测量转子的相对位置,所获得的信号输入到控制芯片中,驱动电机旋转。同时,还可将该信号通过主板输出,作为测速信号使用,可谓一箭双雕。由于换向脉冲为方波信号,在主板上经过简单处理便可输送给主板进行显示和控制。由于电机的相数一般在2个以上,换向信号的频率为电机的转速的若干倍,因此,如果利用换向脉冲作为测速信号,必须经过除法运算才能得
到真实的电机转速。
图11为霍尔锁定型开关电路CS2018构成的无刷电机控制电路,CS2018内部集成了霍尔电压发生器、差分放大器、史密特触发器和集电极开路的输出级等,它可直接驱动小功率的电机绕组。
图11 用CS2018霍尔开关锁定电路直接驱动电机
有些风扇采用光电传感器来检测风扇的速度,具体做法是:在电动机转子上设置一个遮光板,这样电机每转过一圈,遮光板就会将发光二极管照射到光敏管上的光线阻断一次,光敏管的集电极上电压改变一次,这样便可得到反映电机转速的脉冲信号,如图12所示。
图12 光电传感器原理
从上面的介绍可以看出,利用霍尔传感器和光电传感器所得到的测速信号是有区别的。利用光电传感器测速,速度信号的频率与电机转速相同,而利用霍尔器件输出的换向信号作为测速信号时,两者相差若干倍:如果是两相电机,换向信号的频率为转速的2倍,三相电机中换向信号的频率则是转速的3倍。在这里,BIOS中显示的速度是不是真实的风扇转速,在使用中务必请大家注意!
五、转速调节方法
直流电机调速方式有两种:调压调速和调频调速。采用有刷电机的普通风扇可以通过调压方式改变转速,而采用变频电机的风扇,只能通过调频方式进行调速。对于有刷电机来说,改变供电电压,则是改变转子绕组中电流从而改变磁场强度和转矩,电机的转速随着转矩的增加而升高,随着转矩的减小而降低。这种电机在负载阻力增大时,电机的转速会随之下降。要想在荷载变化时维持转速不变,
必须采用闭环控制,通过速度负反馈来实现,因此控制电路比较复杂。
图13是一个实用的有刷电机控制方案,它是利用MIC501专用芯片为核心结合一些外围元件实现的。和图10所示的无刷电机控制电路进行一个简单的比较,便可发现两者电路结构的明显区别。
图13 调压调速电路
在有刷电机电路中,电机主回路中与功率晶体管VT串联,VT的作用相当于一个可变电阻,芯片7脚输出的信号通过基极电阻Rb与其基极相连,对VT的导通程度进行控制,电机转速随VT的导通程度的变化而变化。VT截止时,电机停转;VT饱和导通时,电机全速(Full Speed)旋转。图中T1为热敏电阻,接入控制芯片的第一个控制端VT1,实现转速-温度自动控制;从第二个控制输入端接入一个由可变电阻组成的偏置电路,可实现转速的手动控制。
由于有刷电机的转速受到荷载大小的影响,采用这种电机的风扇在使用过程中容易因为灰尘和润滑不良等因素造成转速下降甚至停转,对CPU等昂贵部件的安全构成威胁。在电脑故障中,因为风扇转速下降导致的电脑死机、蓝屏和重启动等故障经常发生,其中也有因风扇停转而导致芯片烧毁的案例。
变频电机则很少出现这些问题,因为其转速只与所设定的频率有关,而与载荷和供电电压无关,无需转速反馈控制,即可实现恒定转速,因此风扇运转的稳定性和可靠性大大增强。
读到此处,细心的读者也许要问,金星12型风扇配件中用来调速的旋钮是一个电位器(如图14),难道这款风扇采用了技术落后的有刷电机而不是变频电机吗?因为有刷电机通常通过调节串联电阻来调节供电电压,以实现转速调整,调节电阻阻值实际上就是调节供电电压。
图14 venus12型风扇调速器
其实不然,与有刷电机控制电路输出模拟信号不同,变频电机的转速控制完全基于DSP(数字信号处理)控制过程。电位器本身实现的直流电压调节,它从DSP芯片的模拟信号输入端接入,其参数经过A/D转换后,控制芯片的输出仍为数字信号。简言之,有刷电机的控制过程,从输入到输出是完全模拟的,而变频电机的控制电路输入模拟信号(如温度、电压或PWM信号),而输出数字信号。
一些高档风扇可根据被散热设备的温度变化自动调节转速,其过程是:利用温度传感器(热敏电阻等)测量被散热设备的温度,并将其数值反馈给风扇控制电路,控制电路根据所设定的温度-转速特性曲线(如图15)调节风扇转速。风扇的这种自适应功能既能有效地保护被散热设备,又能在温度较低时减少耗电和噪音。一些厂商之所以给他们的产品冠以“智能风扇”的美名(如曜越科技的SMART CASE FAN II风扇),正是因为具有这种功能。
图15 温度-转速曲线
六、风扇的监控与保护
尽管变频电机有很高的可靠性,但它仍然是机械器件,在长时间使用时,其速度可能会下降甚至停转,所以最好对风扇的运行状态进行实时监测,便于及时发现问题。
目前,对风扇自身的监控方式有报警传感器和速度传感器两种类型,利用报警传感器可在风扇速度低于某个门限值时给出报警信号,而速度信号输出则可实现风扇速度的实时监控。
从风扇电路输出的报警信号有“高电平”和“低电平”两种状态,两种电平所代表的意义一般按照正逻辑体制,高电平表示“故障”,“低电平”表示“正常”。
从风扇电路输出的转速信号通常为脉冲形式,每个波头表示风扇转过一圈,这样的信号可直接通过数据总线提供给主机进行显示。某些风扇输出的转速信号并不是风扇的真实转速,而是转速的倍数,譬如每转一圈产生2个、4个或6个脉冲,必须经过处理才能形成反映风扇的真实转速信号。如欲辨别风扇转速是真实转速还是某个倍数,可使用转速表测量实际转速,然后与显示的数据进行比较。风扇的测速信号一般从三引线插头输出,三根引线中黄色和黑色分别为+12V 电源和接地,另外一种颜色的线则是转速信号输出线。应该注意的是,某些三引线风扇的第三根引线并不是测速信号输出线,而是转速控制信号线,通过它向风扇电机输入调速控制信号。
七、高档风扇的接线
普通风扇只有一个电源插头,使用起来很简单。高档风扇有很多插头,必须弄清楚它们的功能并进行正确的设置和连接后,那些高级功能才能得以利用。
1、测温信号线的连接。温度信号一般采用热敏电阻作为温度传感器进行温度采样。以Tt金星12型风扇为例,其温度变化导致热敏电阻的阻值变化,因此输入信号是没有极性的。只要将热敏电阻置于CPU和散热片之间,然后拔去风扇上的黄色信号线的跳线,将风扇的黄色信号线插头,测温信号线的连接就完成了,如图16。
图16 传感器的连接方法
2、调速器信号线的连接。手动调速器实际上是一个可变电阻,阻值调至最小(或用跳线短接)时风扇的转速最低,阻值最大时(或拔去跳线)风扇全速运转。Tt金星12型风扇随机附件中有两个调速器,可根据情况选用其中之一。既可安装在主机箱前面板的3.5"软驱的位置,也可安装在主机箱背后的插槽位置。最后将插头连接到风扇的红线插座上即可。
直流调速器的工作原理
直流调速器的工作原理 The manuscript was revised on the evening of 2021
直流调速器的工作原理 直流调速器就是调节直流电动机速度的设备,上端和交流电源连接,下端和直流电动机连接,直流调速器将交流电转化成两路输出直流电源,一路输入给 直流电机砺磁(定子),一路输入给直流电机电枢(转子),直流调速器通过控制电枢直流电压来调节直流电动机转速。同时直流电动机给调速器一个反馈电流,调速器根据反馈电流来判断直流电机的转速情况,必要时修正电枢电压输出,以此来再次调节电机的转速。 直流电机的调速方案一般有下列3种方式: 1、改变电枢电压;(最长用的一种方案) 2、改变激磁绕组电压; 3、改变电枢回路电阻。 其实就是可控硅调压电路,电机拖动课本上非常清楚了 直流调速分为三种:转子串电阻调速,调压调速,弱磁调速。 转子串电阻一般用于低精度调速场合,串入电阻后由于机械特性曲线变软,一般在倒拉反转型负载中使用 调压调速,机械特性曲线很硬,能够在保证了输出转矩不变的情况下,调整转速,很容易实现高精度调速 弱磁调速,由于弱磁后,电机转速升高,因此一般情况下配合调压调速,与之共同应用。缺点调速范围小且只能增速不能减速,控制不当易发生飞车问题。 直流调速器 直流调速器是一种电机调速装置,包括电机直流调速器,脉宽直流调速器,可控硅直流调速器等.一般为模块式直流电机调速器,集电源、控制、驱动电路于一体,采用立体结构布局,控制电路采用微功耗元件,用光电耦合器实现电流、电压的隔离变换,电路的比例常数、积分常数和微分常数用PID适配器调整。该调速器体积小、重量轻,可单独使用也可直接安装在直流电机上构成一体化直流调速电机,可具有调速器所应有的一切功能。 直流调速器使用条件 ? 1.海拔高度不超过00米。(超过0米,额定输出值有所降低) 2.周围环境温度不高于℃不低于-10℃。
功率因数校正之基本原理
功率因数校正之基本原理 何谓工率因数? 功率因数(power factor;pf)定义为实功(real power;P)对视在功率(apparent power;S)之比,或代表电压与电流波形所形成之相角之余弦,如图1。功率因数值可由0至1之间变化,可为电感性(延迟的、指标向上)或电容性(领先的、指标向下)。为了降低电感性之延迟,可增加电容,直到pf为1。当电压与电流波形为同相时,工率因数等于1(cos(0o)=1)。所有努力使工率因数等于1是为了使电路为纯电阻化(实功等于视在功率)。 ▲图1: 功率因数之三角关系。 实功(瓦特)可提供实际工作,此为能量转换元素(例如电能到马达转动rpm)。虚功(reactive power)乃为使实功完成实际工作所产生之磁场(损耗)。而视在功率可想成电力公司提供之总功率,如图1所示。此总功率经由电力线提供产生所需之实功。 当电压与电流皆为正弦波时,如前述定义之功率因数(简称为功因)为电压与电流波形之对应相角,但大部份之电源供应器之输入电流乃非正弦波。当电压为正弦波而电流为非正弦波时,则功因包括两个因素:1)相角位移因素,2)波形失真因素。等式1表示相角位移与波形失真因素之于功因的关系。 ----------------------------------------------------(1)
Irms(1)为电流之主成份,Irms电流之均方根值。因此功率因数校正线路是为了使电流失真最小,且使电流与电压同相。 当功因不等于1时,电流波形没有跟随电压波形,不但有功率损耗,且其产生之谐波透过电力线干扰到连接同一电力线之其它装置。功因越接近1,几乎所有功率皆包含于主频率,其谐波越接近零。 ■了解规范 EN61000-3-2对交流输入电流至第40次谐波规范。而其class D对适用设备之发射有严格之限制(图2)。其class A要求则较宽松(图3)。 ▲图2:电压与电流波形同相且PF=1(Class D)。
直流电机调速器的工作原理
一、什么是直流调速器? 直流调速器就是调节直流电动机速度的设备, 由于直流电动机具有低转速大力矩的特点,是交流电动机无法取代的, 因此调节直流电动机速度的设备—直流调速器,具有广阔的应用天地。 二、什么场合下要选择使用直流调速器? 下列场合需要使用直流调速器: 1.需要较宽的调速范围。 2. 需要较快的动态响应过程。 3. 加、减速时需要自动平滑的过渡过程。 4. 需要低速运转时力矩大。 5. 需要较好的挖土机特性,能将过载电流自动限止在设定电流上。 以上五点也是直流调速器的应用特点。 三、直流调速器应用: 直流调速器在数控机床、造纸印刷、纺织印染、光缆线缆设备、包装机械、电工机械、食品加工机械、橡胶机械、生物设备、印制电路板设备、实验设备、焊接切割、轻工机械、物流输送设备、机车车辆、医设备、通讯设备、雷达设备、卫星地面接受系统等行业广泛应用。 四、直流调速器工作原理简单介绍: 直流调速器就是调节直流电动机速度的设备,上端和交流电源连接,下端和直流电动机连接,直流调速器将交流电转化成两路输出直流电源,一路输入给直流电机砺磁(定子),一路输入给直流电机电枢(转子),直流调速器通过控制电枢直流电压来调节直流电动机转速。同时直流电动机给调速器一个反馈电流,调速器根据反馈电流来判断直流电机的转速情况,必要时修正电枢电压输出,以此来再次调节电机的转速。 五、直流电机的调速方案一般有下列3种方式:1、改变电枢电压;2、改变激磁绕组电压;3、改变电枢回路电阻。 最常用的是调压调速系统,即1(改变电枢电压). 六、一种模块式直流电机调速器,集电源、控制、驱动电路于一体,采用立体结构布局,控制电路采用微功耗元件,用光电耦合器实现电流、电压的隔离变换,电路的比例常数、积分常数和微分常数用PID适配器调整。该调速器体积小、重量轻,可单独使用也可直接安装在直流电机上构成一体化直流调速电机,可具有调速器所应有的一切功能。
直流散热风扇工作原理及应用
直流散热风扇工作原理及应用 根据供电方式的不同,电机有直流电机和交流电机两种类型。电电脑中使用的风扇电机为直流电机,供电电压为+12V,转速在1000~10000转/分之间。 直流电机是将直流电能转换为机械能的旋转机械。它由定子、转子和换向器三个部分组成,如图3。 图3 有刷直流电机的构造 定子(即主磁极)被固定在风扇支架上,是电机的非旋转部分。 转子中有两组以上的线圈,由漆包线绕制而成,称之为绕组。当绕组中有电流通过时产生磁场,该磁场与定子的磁场产生力的作用。由于定子是固定不动的,因此转子在力的作用下转动。 换向器是直流电动机的一种特殊装置,由许多换向片组成,每两个相邻的换向片中间是绝缘片。在换向器的表面用弹簧压着固定的电刷,使转动的电枢绕组得以同外电路联接。当转子转过一定角度后,换向器将供电电压接入另一对绕组,并在该绕组中继续产生磁场。可见,由于换向器的存在,使电枢线圈中受到的电磁转矩保持不变,在这个电磁转矩作用下使电枢得以旋转,如图4。 图7 无刷直流电机原理图 转子利用轴承与外壳之间实现动配合。风扇的扇叶固定在转子上,因此,当转子旋转时,扇叶将与转子一起转动起来。普通风扇一般采用滚珠轴承(如图5),而高档风扇为了提高运转的稳定性和增加使用寿命,通常采用更为先进的液态轴承(如图6)。 图5 滚珠轴承 图6 液态轴承的结构 二、有刷电机与无刷电机 如前所述,直流电机是利用碳刷实现换向的。由于碳刷存在摩擦,使得电刷乃至电机的寿命减短。同时,电刷在高速运转过程中会产生火花,还会对周围的电子线路形成干扰。为此,人们发明了一种无需碳刷的直流电机,通常也称作无刷电机(brushless motor)。 无刷电机将绕组作为定子,而永久磁铁作为转子(如图7),结构上与有刷电机正好相反。无刷电机采用电子线路切换绕组的通电顺序,产生旋转磁场,推动转子做旋转运动。 图7 无刷直流电机原理图 无刷电机由于没有碳刷,无需维护寿命长,速度调节精度高。因此,无刷电机正在迅速取代传统的有刷电机,带变频技术的家用电器(如变频空调、变频电冰箱等)就是使用了无刷电机,目前散热风扇中几乎全部使用无刷电机。 三、变频电机工作原理
风机叶片原理和结构
风机叶片的原理、结构和运行维护 潘东浩 第一章风机叶片报涉及的原理 第一节风力机获得的能量 一.气流的动能 1 2 i 3 E= 2 mv =2 p Sv 式中m——气体的质量 S——风轮的扫风面积,单位为m2 v 气体的速度,单位是m/s p ------空气密度,单位是kg/m3 E 气体的动能,单位是W 风力机实际获得的轴功率 P=2 p sJc p 式中P----- 风力机实际获得的轴功率,单位为W; p ------空气密度,单位为kg/m3; S ----- 风轮的扫风面积,单位为m2; v ----- 上游风速,单位为m/s. C p ---------- 风能利用系数 三.风机从风能中获得的能量是有限的,风机的理论最大效率
n Q 0.593 即为贝兹(Betz)理论的极限值。 第二节叶片的受力分析 一.作用在桨叶上的气动力 上图是风轮叶片剖面叶素不考虑诱导速
度情况下的受力分析。在叶片局部剖面上,W是来流速度V和局部线速度U的矢量和。速度W在叶片局部剖面上产生升力dL和阻力dD,通过把dL和dD分解到平行和垂直风轮旋转平面上,即为风轮的轴向推力dFn和旋转切向力dFt。轴向推力作用在风力发电机组塔架上,旋转切向力产生有用的旋转力矩,驱动风轮转动。 上图中的几何关系式如下: W =V U ①=0 + a dFn=dDs in ① +dLcos ① dFt=dLs in ①-dDcos ① dM=rdFt=r(dLsin ①-dDcos①) 其中,①为相对速度W与局部线速度U (旋转平面)的夹角,称为倾斜角;0为弦线和局部 线速度U (旋转平面)的夹角,称为安装角或节距角; a为弦线和相对速度W的夹 角,称为攻角。 ?桨叶角度的调整(安装角)对功率的影响。(定桨距) 改变桨叶节距角的设定会影响额定功率的输出,根据定桨距风力机的特点,应当尽量提高低 风速时的功率系数和考虑高风速时的失速性能。定桨距风力发电机组 在额定风速以下运行时,在低风速区,不同的节距角所对应的功率曲线几乎是重合的。但在 高风速区,节距角的变化,对其最大输出功率(额定功率点)的影响是十分明显的。事实 上,调整桨叶的节距角,只是改变了桨叶对气流的失速点。根据实验结果,节距角越小,气 流对桨叶的失速点越高,其最大输出功率也越高。这就是定桨距风力机可以在不同的空气密 度下调整桨叶安装角的根据。 不同安装角的功率曲线如下图所示: 750KW国产桨叶各安装角实际功率Illi线对比图 ! --------- ——B ----------------! *pitchy—00 P itch=-3. 00 pitcta-L T5 pi 75 ―*—pitch=-Q. 00 * 1 -------- piteh=l.00——= ---------------- i
#直流电机调速系统分析与设计
第一部分并励直流电动机的工作原理 并励直流电机的励磁绕组和电枢绕组相并联,作为并励发电机来说,是电机本身发出来的端电压为励磁绕组供电;作为并励电动机来说,励磁绕组和电枢共用同一电源,从性能上讲和他励直流电动机相同。 导体受力的方向用左手定则确定。这一对电磁力形成了作用于电枢一个力矩,这个力矩在旋转电机里称为电磁转矩,转矩的方向是逆时针方向,企图使电枢逆时针方向转动。如果此电磁转矩能够克服电枢上的阻转矩(例如由摩擦引起的阻转矩以及其它负载转矩),电枢就能按逆时针方向旋转起来。 当电枢转了180°后,导体 cd转到 N极下,导体ab转到S极下时,由于直流电源供给的电流方向不变,仍从电刷 A流入,经导体cd 、ab 后,从电刷B流出。这时导体cd 受力方向变为从右向左,导体ab 受力方向是从左向右,产生的电磁转矩的方向仍为逆时针方向。 因此,电枢一经转动,由于换向器配合电刷对电流的换向作用,直流电流交替地由导体 ab和cd 流入,使线圈边只要处于N 极下,其中通过电流的方向总是由电刷A 流入的方向,而在S 极下时,总是从电刷 B流出的方向。这就保证了每个极下线圈边中的电流始终是一个方向,从而形成一种方向不变的转矩,使电动机能连续地旋转。这就是直流电动机的工作原理。 转速电流双闭环原理 转速、电流双闭环直流调速系统的组成,把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。 从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。 这就形成了转速、电流双闭环调速系统。 限幅的作用: 转速调节器ASR的输出限幅电压U*im --电流给定电压的最大值,即限制了最大电流; τ电流调节器ACR的输出限幅电压Ucm --Uc的最大值,即限制了电力电子变换器的最大输出电压Udm。 第二部分 PID算法的基本原理 PID调节器各校正环节的作用 1、比例环节:即时成比例地反应控制系统的偏差信号e(t),偏差一旦产生,调节 器立即产生控制作用以减小偏差。 2、积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分 时间常数TI,TI越大,积分作用越弱,反之则越强。 3、微分环节:能反应偏差信号的变化趋势(变化速率),并能在偏差信号的值变得太 大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减 小调节时间。 下面对控制点所采用的PID控制算法进行说明。
LLC 电路基本原理分析及公式推导
Simplified Analysis and Design of Series-resonant LLC Half-bridge Converters MLD GROUP INDUSTRIAL & POWER CONVERSION DIVISION Off-line SMPS BU Application Lab I&PC Div. - Off-line SMPS Appl. Lab
Presentation Outline ?LLC series-resonant Half-bridge: operation and significant waveforms ?Simplified model (FHA approach) ?300W design example I&PC Div. - Off-line SMPS Appl. Lab
Series-resonant LLC Half-Bridge Topology and features Q1 Cr Ls Vin Q2 Lp LLC tank circuit Preferably integrated into a single magnetic structure 3 reactive elements, 2 resonant frequencies 1 f r1 2?π?Ls?Cr f>f r1r2Center-tapped output with full- wave rectification (low voltage and high current) Vout Vout Single-ended output with bridge rectifiication (high voltage and low current) Multiresonant LLCtank circuit Variable frequency control Fixed50%duty cycle for Q1&Q2 Deadtime between LGandHGto allow MOSFET’s ZVS@turnon fsw≈fr,sinusoidal waveforms:low turnofflosses,low EMI Equal voltage¤t stressfor secondary rectifiers;ZCS,then no recovery losses Nooutputchoke;cost saving Integrated magnetics:both L’scan be realized with thetransformer. Highefficiency:>96%achievable
德国西门子直流调速装置的工作原理
德国西门子直流调速装置的工作原理 直流调速器的工作原理 直流调速器就是调节直流电动机速度的设备,上端和交流电源连接,下端和直流电动机连接,直流调速器将交流电转化成两路输出直流电源,一路输入给直流电机砺磁(定子),一路输入给直流电机电枢(转子),直流调速器通过控制电枢直流电压来调节直流电动机转速。同时直流电动机给调速器一个反馈电流,调速器根据反馈电流来判断直流电机的转速情况,必要时修正电枢电压输出,以此来再次调节电机的转速。 调速方案一般有下列3种方式 1、改变电枢电压;(最长用的一种方案) 2、改变激磁绕组电压; 3、改变电枢回路电阻。 直流调速分为三种:转子串电阻调速,调压调速,弱磁调速。 转子串电阻一般用于低精度调速场合,串入电阻后由于机械特性曲线变软,一般在倒拉反转型负载中使用 调压调速,机械特性曲线很硬,能够在保证了输出转矩不变的情况下,调整转速,很容易实现高精度调速 弱磁调速,由于弱磁后,电机转速升高,因此一般情况下配合调压调速,与之共同应用。缺点调速范围小且只能增速不能减速,控制不当易发生飞车问题。 直流调速器是一种电机调速装置,包括电机直流调速器,脉宽直流调速器,可控硅直流调速器等.一般为模块式直流电机调速器,集电源、控制、驱动电路于一体,采用立体结构布局,控制电路采用微功耗元件,用光电耦合器实现电流、电压的隔离变换,电路的比例常数、积分常数和微分常数用PID适配器调整。该调速器体积小、重量轻,可单独使用也可直接安装在直流电机上构成一体化直流调速电机,可具有调速器所应有的一切功能。 直流电动机的工作原理图。 (1)构成: 磁场:图中 N和 S是一对静止的磁极,用以产生磁场,其磁感应强度沿圆周为正弦分布。 励磁绕组;--; 容量较小的发电机是用磁铁做磁极的。容量较大的发电机的磁场是
直流调速器工作原理
直流调速器工作原理 直流调速器就是调节直流电动机速度的设备,上端和交流电源连接, 下端和直流 电动机连接, 直流调速器 将交流电转 化成两路输 出直流电源, 一路输入给 直流电机砺磁(定子),一路输入给直流电机电枢(转子),直流调速器通过控制电枢直流电压来调节直流电动机转速。同时直流电动机给调速器一个反馈电流,调速器根据反馈电流来判断直流电机的转速情况,必要时修正电枢电压输出,以此来再次调节电机的转速。 调速方案一般有下列3种方式 1、改变电枢电压;(最长用的一种方案) 2、改变激磁绕组电压; 3、改变电枢回路电阻。 直流调速分为三种:转子串电阻调速,调压调速,弱磁
调速。 转子串电阻一般用于低精度调速场合,串入电阻后由于机械特性曲线变软,一般在倒拉反转型负载中使用调压调速,机械特性曲线很硬,能够在保证了输出转矩不变的情况下,调整转速,很容易实现高精度调速弱磁调速,由于弱磁后,电机转速升高,因此一般情况下配合调压调速,与之共同应用。缺点调速范围小且只能增速不能减速,控制不当易发生飞车问题。 直流调速器是一种电机调速装置,包括电机直流调速器,脉宽直流调速器,可控硅直流调速器等.一般为模块式直流电机调速器,集电源、控制、驱动电路于一体,采用立体结构布局,控制电路采用微功耗元件,用光电耦合器实现电流、电压的隔离变换,电路的比例常数、积分常数和微分常数用PID适配器调整。该调速器体积小、重量轻,可单独使用也可直接安装在直流电机上构成一体化直流调速电机,可具有调速器所应有的一切功能。 直流调速器使用条件 1.海拔高度不超过1000米。(超过1000米,额定输出电流值有所降低) 2.周围环境温度不高于40℃不低于-10℃。 3.周围环境相对湿度不大于85[%],无水凝滴。 4.没有显着震动和颠簸的场合。
风机控制系统结构原理分解
风机控制系统结构
一、风力发电机组控制系统的概述 风力发电机组是实现由风能到机械能和由机械能到电能两个能量转换过程的装置,风轮系统实现了从风能到机械能的能量转换,发电机和控制系统则实现了从机械能到电能的能量转换过程,在考虑风力发电机组控制系统的控制目标时,应结合它们的运行方式重点实现以下控制目标: 1. 控制系统保持风力发电机组安全可靠运行,同时高质量地将不断变化的风能转化为频率、电压恒定的交流电送入电网。 2. 控制系统采用计算机控制技术实现对风力发电机组的运行参数、状态监控显示及故障处理,完成机组的最佳运行状态管理和控制。 3. 利用计算机智能控制实现机组的功率优化控制,定桨距恒速机组主要进行软切入、软切出及功率因数补偿控制,对变桨距风力发电机组主要进行最佳尖速比和额定风速以上的恒功率控制。 4. 大于开机风速并且转速达到并网转速的条件下,风力发电机组能软切入自动并网,保证电流冲击小于额定电流。对于恒速恒频的风机,当风速在4-7 m/s之间,切入小发电机组(小于300KW)并网运行,当风速在7-30 m/s之间,切人大发电机组(大于500KW)并网运行。 主要完成下列自动控制功能: 1)大风情况下,当风速达到停机风速时,风力发电机组应叶尖限速、脱网、抱液压机械闸停机,而且在脱网同时,风力发电机组偏航90°。停机后待风速降低到大风开机风速时,风力发电机组又可自动并入电网运行。 2)为了避免小风时发生频繁开、停机现象,在并网后10min内不能按风速自动停机。同样,在小风自动脱网停机后,5min内不能软切并网。 3)当风速小于停机风速时,为了避免风力发电机组长期逆功率运行,造成电网损耗,应自动脱网,使风力发电机组处于自由转动的待风状态。 4)当风速大于开机风速,要求风力发电机组的偏航机构始终能自动跟风,跟风精度范围 ±15°。 5)风力发电机组的液压机械闸在并网运行、开机和待风状态下,应该松开机械闸,其余状态下(大风停机、断电和故障等)均应抱闸。 6)风力发电机组的叶尖闸除非在脱网瞬间、超速和断电时释放,起平稳刹车作用。其余时间(运行期间、正常和故障停机期间)均处于归位状态。 7)在大风停机和超速停机的情况下,风力发电机组除了应该脱网、抱闸和甩叶尖闸停机外,
直流调速工作原理 2
第一部分直流电机的基本工作原理 一、直流电机的用途 直流电动机的优点: 1 调速范围广,易于平滑调节 2 过载、启动、制动转矩大 3 易于控制,可靠性高 4 调速时的能量损耗较小 缺点:换向困难,维修比较麻烦,制造成本高(与相 同功率的交流异步电机比较。 应用:机床方面的应用:龙门刨床、导轨磨床、龙门铣床等设备的工作驱动电机,导轨磨床、镗床、铣床等设备的主轴电机; 轧钢机、电车、电气铁道牵引、造纸、纺织拖动; 直流发电机:用作电解、电镀、电冶炼、充电、交流发电机励磁等的直流电源。 二、直流电机的工作原理 原理:任何电机的工作原理都是建立在电磁感应和电磁力这个基础上。 1、直流电机的工作原理 工作原理:导体在磁场中运动时,导体中会感应出电势e;e=B×l×v; B:磁密 L:导体长度; V:导体与磁场的相对速度。 正方向:用右手定则判断。电势e正方向表示电位升高的方向,与U相反。如果同一元件上e和U正方向相同时,e= -U。 理解:电磁感应原理的变形(变化的磁通产生感应电动势)
3、直流电动机的工作原理图。 (1)构成: 磁场:图中N和S是一对静止的磁极,用以产生磁场,其磁感应强度沿圆周为正弦分布。 励磁绕组——容量较小的发电机是用永久磁铁做磁极的。容量较大的发电机的磁场是由直流电流通过绕在磁极铁心上的绕组产生的。用来形成N极和S极的绕组称为励磁绕组,励磁绕组中的电流称为励磁电流If。 电枢绕组:在N极和S极之间,有一个能绕轴旋转的圆柱形铁心,其上紧绕着一个线圈称为电枢绕组(图中只画出一匝线圈),电枢绕组中的电流称为电枢电流Ia。 换向器:电枢绕组两端分别接在两个相互绝缘而和绕组同轴旋转的半圆形铜片——换向片上,组成一个换向器。换向器上压着固定不动的炭质电刷。 电枢:铁心、电枢绕组和换向器所组成的旋转部分称为电枢。 电动机向负载输出机械功率的同时,却向电动机输入电功率,电动机起着将电能转换为机械能的作用。 能量转换: 电能->电磁转矩->负载(机械能) 3、电机的结构要求: 1 电磁要求: 产生磁场,感应出电动势,通过电流,产生电磁转矩 2机械要求:传递转矩,保持坚固稳定,冷却的要求,检修,运行可靠。
准谐振SMPS控制器L6565功能原理及应用
准谐振SMPS控制器L6565功能原理及应用 准谐振SMPS控制器L6565功能原理及应用 1概述 ST公司在近期推出的L6565单片IC,是适用于准谐振(QR)零电压开关(ZVS)回扫变换器电流型初级控制器。QR操作依靠变压器退磁感测输入获得,变换器功率容量随主线电压变化通过线路前馈电压前馈补偿。在轻载时,L6565自动降低工作频率,但仍然尽可能保持接近ZVS 运行。 L6565的主要特点如下: QRZVS回扫拓扑电流型初级控制; 线路电压前馈控制保证交付恒定功率; 频率折弯(foldback)功能可获得最佳待机频率; 逐周脉冲与打嗝(hiccup)模式过电流保护(OCP); 超低起动电流(<70μA)和静态电流(<3.5mA); 堵塞功能(开/关控制); 25V±1%的内部基准电压; ±400mA的图腾驱动器,在欠电压闭锁(UVLO) 情况下,保持输出低电平。 L6565的主要应用包括TV/监视器开关型电源(SMPS)、AC/DC适配器/充电器、数字消费类产品、打印机、传真机和扫描设备等。 2功能与工作原理 21封装及引脚功能 L6565采用8脚DIP(L6565N)和8脚SO(L6565D)封装,引脚排列。 L6565的引脚功能分别为: 脚1(INV)误差放大器反相输入; 脚2(COMP)误差放大器输出; 脚3(VFF)线路电压前馈; 脚4(CS)电流感测输入; 脚5(ZCD)变压器退磁零电流检测输入; 脚6(GND)地; 脚7(GD)栅极驱动器输出; 脚8(VCC)电源电压。 22工作原理 图1L6565引脚排列 图2L6565电源电路 图3ZCD及相关电路 (1)电源 L6565的电源电路。IC脚VCC的导通门限电压典型值是135V,关闭门限电压典型值是9 5V。一旦VCC脚导通,IC内部栅极驱动器电压直接由VCC提供,其它内部所有电路的工作电压均由线性调节器产生的7V电压供给。一个内部25V±1%的精密电压,供给初级
肖特基二极管
肖特基二极管 肖特基二极管是以其发明人肖特基博士(Schottky)命名的,SBD是肖特基势垒二极管(SchottkyBarrierDiode,缩写成SBD)的简称。SBD不是利用P型半导体与N型半导体接触形成PN结原理制作的,而是利用金属与半导体接触形成的金属-半导体结原理制作的。因此,SBD也称为金属-半导体(接触)二极管或表面势垒二极管,它是一种热载流子二极管。 简介 肖特基二极管是以其发明人肖特基博士(Schottky)命名的,SBD是肖特基势垒二极管 肖特基二极管结构原理图 (SchottkyBarrierDiode,缩写成SBD)的简称。SBD不是利用P型半导体与N型半导体接触形成PN结原理制作的,而是利用金属与半导体接触形成的金属-半导体结原理制作的。因此,SBD也称为金属-半导体(接触)二极管或表面势垒二极管,它是一种热载流子二极管。是近年来问世的低功耗、大电流、超高速半导体器件。其反向恢复时间极短(可以小到几纳秒),正向导通压降仅0.4V左右,而整流电流却可达到几千毫安。这些优良特性是快恢复二极管所无法比拟的。中、小功率肖特基整流二极管大多采用封装形式。 原理 肖特基二极管是贵金属(金、银、铝、铂等)A为正极,以N型半导体B为负极,利用二者接触面上形成的势垒具有整流特性而制成的金属-半导体器件。因为N型半导体中存在着大量的电子,贵金属中仅有极少量的自由电子,所以电子便从浓度高的B中向浓度低的A中扩散。显然,金属A中没有空穴,也就不存在空穴自A向B的扩散运动。随着电子不断从B扩散到A,B表面电子浓度逐渐降低,表面电中性被破坏,于是就形成势垒,其电场方向为B→A。但在该电场作用之下,A中的电子也会产生从A→B的漂移运动,从而消弱了由于扩散运动而形成的电场。当建立起一定宽度的空间电荷区后,电场引起的电子漂移运动和浓度不同引起的电子扩散运动达到相对的平衡,便形成了肖特基势垒。
直流风扇电机的基本工作原理
直流风扇电机的基本工作原理 直流风扇电机的基本工作原理根据供电方式的不同,电机有直流电机和交流电机两种类型。电脑中使用的风扇电机为直流电机,供电电压为+12V 直流电机是将直流电能转换为机械能的旋转机械。它由定子、转子和换向器三个部分组成,如图3。 定子(即主磁极)被固定在风扇支架上,是电机的非旋转部分。 转子中有两组以上的线圈,由漆包线绕制而成,称之为绕组。当绕组中有电流通过时产生磁场,该磁场与定子的磁场产生力的作用。由于定子是固定不动的,因此转子在力的作用下转动。 换向器是直流电动机的一种特殊装置,由许多换向片组成,每两个相邻的换向片中间是绝缘片。在换向器的表面用弹簧压着固定的电刷,使转动的电枢绕组得以同外电路联接。当转子转过一定角度后,换向器将供电电压接入另一对绕组,并在该绕组中继续产生磁场。可见,由于换向器的存在,使电枢线圈中受到的电磁转矩保持不变,在这个电磁转矩作用下使电枢得以旋转,如图4。
液态轴承的结构转子利用轴承与外壳之间实现动配合。风扇的扇叶固定在转子上,因此,当转子旋转时,扇叶将与转子一起转动起来。普通风扇一般采用滚珠轴承(如图5),而高档风扇为了提高运转的稳定性和增加使用寿命,通常采用更为先进的液态轴承(如图6)。 图5 滚珠轴承
图6 液态轴承的结构 无刷直流电机原理图直流电机是利用碳刷实现换向的。由于碳刷存在摩擦,使得电刷乃至电机的寿命减短。同时,电刷在高速运转过程中会产生火花,还会对周围的电子线路形成干扰。为此,人们发明了一种无需碳刷的直流电机,通常也称作无刷电机(brushless motor)。 无刷电机将绕组作为定子,而永久磁铁作为转子(如图7),结构上与有刷电机正好相反。无刷电机采用电子线路切换绕组的通电顺序,产生旋转磁场,推动转子做旋转运动。 无刷电机由于没有碳刷,无需维护寿命长,速度调节精度高。因此,无刷电机正在迅速取代传统的有刷电机,带变频技术的家用电器(如变频空调、变频电冰箱等)就是使用了无刷电机,目前散热风扇中几乎全部使用无刷电机。
开关电源设计手册 SMPS design
开关电源设计手册
目录 1 隔离式电源设计 1.1 有源功率因数校正 1.2 反激式电源设计 1.3 正激式电源设计 2 非隔离式电源设计 2.1 非隔离式降压型电源设计
1.1 有源功率因数校正 APFC: Active Power Factor Correction 一, 功率因数校正的基本原理 理论上: P.F.= P/S=(REAL POWER)/(TOTAL APPARENT POWER)=Watts/V.A. =有功功率/视在功率 对于输入电压和电流都是理想的正弦波的情况, 如果把输入电压和输入电流的相位差定义为φ, 那么, P.F.=P/S=Cosφ. 相应的功率相量图如下: 对于非理想的正弦波, 假设输入电压为正弦波, 输入电流为周期性的非正弦波, 比如在实际的AC-DC线路中广泛应用的全波整流, 只有当输入电压大于电容的电压时, 才有市电电流给电容充电. 在这种情况下, 电压有效值Vrms=Vpeak/√2 周期性的非正弦波电流经过傅里叶变换为: (Io: 电流直流分量; I1RMS: 电流基波分量, 頻率与V 相同; I2RMS….I nRMS: 电流谐波分量, 频率为基波的 2….n 倍. ) 对于纯净的交流信号, Io=0; I1RMS基波分量有一个 同向成份I1RMSP和一个求积成份I1RMSQ. 于是电流有效值可以表达为: 有功功率P=V RMS*I1RMSP=V RMS*I1RMS*Cosφ1
(φ1: 输入电压和输入电流基波分量I1RMS的相位差) S=V RMS*IRMS total 于使功率因数Power Factor 可以表达为: P.F.=P/S= (I1RMS/I RMS total)* Cos φ1; 定义电流失真系数K= I1RMS/I RMS total = Cosθ; θ为失真角(Distortion angle); K 为与电流谐波(Harmonic) 分量有关的系数. 如果总的谐波分量为零, K 就为1. 最后, 可以表达为: P.F.=Cos φ1*Cos θ ; 功率向量图如下: φ1 是电压V与电流基波I1RMS之间的相量差; θ是电流失真角; 可见功率因数 (PF) 由电流失真系数 ( K ) 和基波电压、基波电流相移因数( Cos φ1) 决定。Cos φ1低,则表示用电电器设备的无功功率大,设备利用率低,导线、变压器绕组损耗大。同时,K值低,则表示输入电流谐波分量大,将造成输入电流波形畸变,对电网造成污染,严重时,对三相四线制供电,还会造成中线电位偏移,致使用电电器设备损坏。 由于常规整流装置常使用非线性器件(如可控硅、二极管),整流器件的导通角小于180o,从而产生大量谐波电流成份,而谐波电流成份不做功,只有基波电流成份做功。所以相移因数(Cos φ1)和电流失真系数(K)相比,输入电流失真系数(K)对供电线路功率因数 (PF) 的影响更大。 为了提高供电线路功率因数,保护用电设备,世界上许多国家和相关国际组织制定出相应的技术标准,以限制谐波电流含量。如:IEC555-2, IEC61000-3-2,EN 60555-2等标准,它们规定了允许产生的最大谐波电流。我国于1994年也颁布了《电能质量公用电网谐波》标准(GB/T14549-93)。
单闭环直流调速系统
第十七单元晶闸管直流调速系统 第二节单闭环直流调速系统 一、转速负反馈直流调速系统 转速负反馈直流调速系统得原理如图l7-40所示。 转速负反馈直流调速系统由转速给定、转速调节器ASR、触发器CF、晶闸管变流器U、测速发电机TG等组成。 直流测速发电机输出电压与电动机转速成正比。经分压器分压取出与转速n成正比得转速反馈电压Ufn。 转速给定电压Ugn与Ufn比较,其偏差电压ΔU=Ugn-Ufn送转速调节器ASR输入端。 ASR输出电压作为触发器移相控制电压Uc,从而控制晶闸管变流器输出电压Ud。 本闭环调速系统只有一个转速反馈环,故称为单闭环调速系统。 1.转速负反馈调速系统工作原理及其静特性 设系统在负载T L时,电动机以给定转速n1稳定运行,此时电枢电流为Id1,对应转速反馈电压为Ufn1,晶闸管变流器输出电压为Udl。 当电动机负载T L增加时,电枢电流Id也增加,电枢回路压降增加,电动机转速下降,则Ufn也相应下降, 而转速给定电压Ugn不变,ΔU=Ugn-Ufn增加。 转速调节器ASR输出电压Uc增加,使控制角α减小,晶闸管整流装置输出电压Ud增加,于就是电动机转速便相应自动回升,其调节过程可简述为: T L↑→Id↑→Id(R∑+Rd)↑→n↓→Ufn↓→△U↑→Uc↑→α↓→Ud↑→n↑。 图17-41所示为闭环系统静特性与开环机械特性得关系。
图中①②③④曲线就是不同Ud之下得开环机械特性。 假设当负载电流为Id1时,电动机运行在曲线①机械特性得A点上。 当负载电流增加为Id2时,在开环系统中由于Ugn不变,晶闸管变流器输出电压Ud也不会变,但由于电枢电流Id增加,电枢回路压降增加,电动机转速将由A点沿着曲线①机械特性下降至B’点,转速只能相应下降。 但在闭环系统中有转速反馈装置,转速稍有降落,转速反馈电压Ufn就相应减小,使偏差电压△U增加,通过转速调节器ASR自动调节,提高晶闸管变流器得输出电压Ud0由Ud01变为Ud02,使系统工作在随线②机械特性上,使电动机转速有所回升,最后稳定在曲线②机械特性得B点上。 同理随着负载电流增加为Id3,Id4,经过转速负反馈闭环系统自动调节作用,相应工作在曲线③④机械特性上,稳定在曲线③④机械特性得C,D点上。 将A,B,C,D点连接起来得ABCD直线就就是闭环系统得静特性。 由图可见,静特性得硬度比开环机械特性硬,转速降Δn要小。闭环系统静特性与开环机械特性虽然都表示电动机得转速-电流(或转矩)关系,但两者就是不同得, 闭环静特性就是表示闭环系统电动机转速与电流(或转矩)得静态关系,它只就是闭环系统调节作用得结果,就是在每条机械特性上取一个相应得工作点,只能表示静态关系,不能反映动态过程。 当负载突然增加时,如图所示由Idl突增到Id2时,转速n先从A点沿着①曲线开环机械特性下降,然后随着Ud01升高为Ud02,转速n再回升到B点稳定运行,整个动态过程不就是沿着静特性AB直线变化得。 2.转速负反馈有静差调速系统及其静特性分析 对调速系统来说,转速给定电压不变时,除了上面分析负载变化所引起得电动机转速变化外,还有其她许多扰动会引起电动机转速得变化,例如交流电源电压得变化、电动机励磁电流得变化等,所有这些扰动与负载变化一样都会影响到转速变化。对于转速负反馈调速系统来说,可以被转速检测装置检测出来,再通过闭环反馈控制减小它们对转速得影响。也就就是说在闭环系统中,对包围在系统前向通道中得各种扰动(如负载变化、交流电压波动、电动机励磁电流得变化等)对被调量(如转速)得影响都有强烈得抑制作用。但就是对于转速负反馈调速系统来说,转速给定电压Ugn得波动与测速发电机得励磁变化引起得转速反馈电压Ufn变化,闭环系统对这种给定量与检测装置得扰动将无能为力。为了使系统有较高得调速精度,必须提高转速给定电源与转速检测装置得精度。
散热风扇工作原理
散热风扇工作原理 散热器都需要通过风扇的强制对流来加快热量的散失,因此一款风扇的好坏,对整个散热效果起到了决定性的作用。配备一个性能优良的CPU风扇也是保证整部电脑顺利运转的关键因素之一。 DC风扇运转原理:根据安培右手定则,导体通过电流,周围会产生磁场,若将此导体置于另一固定磁场中,则将产生吸力或斥力,造成物体移动。在直流风扇的扇叶内部,附着一事先充有磁性之橡胶磁铁。环绕着硅钢片,轴心部份缠绕两组线圈,并使用霍尔感应组件作为同步侦测装置,控制一组电路,该电路使缠绕轴心的两组线圈轮流工作。硅钢片产生不同磁极,此磁极与橡胶磁铁产生吸斥力。当吸斥力大于虱扇的静摩擦力时,扇叶自然转动。由于霍尔感应组件提供同步信号,扇叶因此得以持续运转,至于其运转方向,可依佛莱明右手定则决定。 AC风扇运转原理:AC风扇与DC风扇的区别。前者电源为交流,电源电压会正负交变,不像DC风扇电源电压固定,必须依赖电路控制,使两组线圈轮流工作才能产生不同磁场。AC风扇因电源频率固定,所以硅钢片产生的磁极变化速度,由电源频率决定,频率愈高磁场切换速度愈快,理论上转速会愈快,就像直流风扇极数愈多转速愈快的原理一样。不过,频率也不能太快,太快将造成激活困难。我们电脑散热器上应用的都是DC风扇。而一般一款好的风扇主要考察风量、转速、噪音、使用寿命长短、采用何种扇叶轴承等。 风量是指风冷散热器风扇每分钟排出或纳入的空气总体积,如果按立方英尺来计算,单位就是CFM;如果按立方米来算,就是CMM。散热器产品经常使用的风量单位是CFM(约为0.028立方米/分钟)。50×50x10mm CPU风扇一般会达到10 CFM,60×60x25mm风扇通常能达到20-30的CFM。在散热片材质相同的情况下,风量是衡量风冷散热器散热能力的最重要的指标。显然,风量越大的散热器其散热能力也越高。这是因为空气的热容比率是一定的,更大的风量,也就是单位时间内更多的空气能带走更多的热量。当然,同样风量的情况下散热效果和风的流动方式有关。风量和风压风量和风压是两个相对的概念。一般来说,要设计风扇的风量大,就要牺牲一些风压。如果风扇可以带动大量的空气流动,但风压小,风就吹不到散热器的底部(这就是为什么一些风扇转速很高,风量很大,但就是散热效果不好的原因)。相反的,风压大、风量就小,没有足够的冷空气与散热片进行热交换,也会造成散热效果不好。一般铝质鳍片的散热片要求风扇的风压足够大,而铜质鳍片的散热片则要求风扇的风量足够大;鳍片较密的散热片相比鳍片较疏的散热片,需要更大风压的风扇,否则空气在鳍片间流动不畅,散热效果会大打折扣。所以说不同的散热器,厂商会根据需要配合适当风量、风压的风扇,而并不是单一追求大风量或者高风压的风扇。 风扇转速是指风扇扇叶每分钟旋转的次数,单位是rpm。风扇转速由电机内线圈的匝数、工作电压、风扇扇叶的数量、倾角、高度、直径和轴承系统共同决定。转速和风扇质量没有必然的联系。风扇的转速可以通过内部的转速信号进行测量,也可以通过外部进行测量(外部测量是用其它仪器看风扇转的有多快,内部测量则直接可以到BIOS里看,也可以通过软件看。内部测量相对来说误差大一些)。? 因为随着环境温度的变化,有时需要不同转速风扇来满足需求。一些厂商特意设计出可调节风扇转速的散热器,分手动和自动两种。手动的主要是让用户可以在冬天使用低转速获得低噪音,夏天时使用高转速获得好的散热效果。自动类调温散热器一般带有一个温控感应器,能够根据当前的工作温度(如散热片的温度)自动控制风扇的转速,温度高则提高转速,温度低则降低转速,以达到一个动态的平衡,从而让风噪与散热效果保持一个最佳的结合点。
肖特基二级管
肖特基二极管 目录 简介 原理 优点 结构 特点 应用 其它 [编辑本段] 简介 肖特基二极管是以其发明人肖特基博士(Schottky)命名的,SBD是肖特基势垒二极管(SchottkyBarrierDiode,缩写成SBD)的简称。SBD不是利用P型半导体与N型半导体接触形成PN结原理制作的,而是利用金属与半导体接触形成的金属-半导体结原理制作的。因此,SBD也称为金属-半导体(接触)二极管或表面势垒二极管,它是一种热载流子二极管。 是近年来问世的低功耗、大电流、超高速半导体器件。其反向恢复时间极短(可以小到几纳秒),正向导通压降仅0.4V左右,而整流电流却可达到几千安培。这些优良特性是快恢复二极管所无法比拟的。中、小功率肖特基整流二极管大多采用封装形式。 [编辑本段] 原理
肖特基二极管是贵金属(金、银、铝、铂等)A为正极,以N型半导体B为负极,利用二者接触面上形成的势垒具有整流特性而制成的金属-半导体器件。因为N 型半导体中存在着大量的电子,贵金属中仅有极少量的自由电子,所以电子便从浓度高的B中向浓度低的A中扩散。显然,金属A中没有空穴,也就不存在空穴自A向B的扩散运动。随着电子不断从B扩散到A,B表面电子浓度逐渐降低,表面电中性被破坏,于是就形成势垒,其电场方向为B→A。但在该电场作用之下,A中的电子也会产生从A→B的漂移运动,从而消弱了由于扩散运动而形成的电场。当建立起一定宽度的空间电荷区后,电场引起的电子漂移运动和浓度不同引起的电子扩散运动达到相对的平衡,便形成了肖特基势垒。 典型的肖特基整流管的内部电路结构是以N型半导体为基片,在上面形成用砷作掺杂剂的N-外延层。阳极使用钼或铝等材料制成阻档层。用二氧化硅(SiO2)来消除边缘区域的电场,提高管子的耐压值。N型基片具有很小的通态电阻,其掺杂浓度较H-层要高100%倍。在基片下边形成N+阴极层,其作用是减小阴极的接触电阻。通过调整结构参数,N型基片和阳极金属之间便形成肖特基势垒,如图所示。当在肖特基势垒两端加上正向偏压(阳极金属接电源正极,N型基片接电源负极)时,肖特基势垒层变窄,其内阻变小;反之,若在肖特基势垒两端加上反向偏压时,肖特基势垒层则变宽,其内阻变大。 综上所述,肖特基整流管的结构原理与PN结整流管有很大的区别通常将PN结整流管称作结整流管,而把金属-半导管整流管叫作肖特基整流管,近年来,采用硅平面工艺制造的铝硅肖特基二极管也已问世,这不仅可节省贵金属,大幅度降低成本,还改善了参数的一致性。 [编辑本段] 优点 SBD具有开关频率高和正向压降低等优点,但其反向击穿电压比较低,大多不高于60V,最高仅约100V,以致于限制了其应用范围。像在开关电源(SMPS)和功率因数校正(PFC)电路中功率开关器件的续流二极管、变压器次级用100V以上的高频整流二极管、RCD缓冲器电路中用600V~1.2kV的高速二极管以及PFC升压用600V二极管等,只有使用快速恢复外延二极管(FRED)和超快速恢复二极管(UFRD)。目前UFRD的反向恢复时间Trr也在20ns以上,根本不能满足像空间站等领域用1MHz~3MHz的SMPS需要。即使是硬开关为100kHz的SMPS,由于UFRD的导通损耗和开关损耗均较大,壳温很高,需用较大的散热器,从而使SMPS 体积和重量增加,不符合小型化和轻薄化的发展趋势。因此,发展100V以上的高压SBD,一直是人们研究的课题和关注的热点。近几年,SBD已取得了突破性的进展,150V和200V的高压SBD已经上市,使用新型材料制作的超过1kV的SBD也研制成功,从而为其应用注入了新的生机与活力。 [编辑本段]