大型机械臂被碰撞检测装置
通用机械臂设计说明书
题目: 通用机械臂机构设计
目录 1.绪论 (1) 1.1 选题背景 (1) 1.2 国内外研究现状和趋势 (1) 1.3机械臂的组成 (2) 1.4 设计目的 (3) 1.5研究内容 (4) 2.机械臂的总体设计方案 (4) 2.1 机械臂总体结构的类型 (4) 2.2机械臂主要部件及其运动 (5) 2.3驱动机构选择 (6) 2.4机械臂技术参数 (6) 3.机械臂手部计算 (7) 3.1手部设计基本要求 (7) 3.2典型手部结构 (7) 3.3机械臂手爪的设计计算 (7) 4.腕部的设计计算 (12) 4.1腕部设计基本要求 (12) 4.2腕部结构 (13) 4.3腕部的设计计算 (13) 5.臂部设计以及有关计算 (17) 5.1臂部设计的基本要求 (18) 5.2手臂的典型机构及其选择 (19) 6机座设计 (24) 结论 (24) 参考文献 (25)
1.绪论 1.1 选题背景 机械臂是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械臂的发展,使得机械臂能更好地实现与机械化和自动化的有机结合。机械臂能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。机械臂越来越广泛的得到了应用,在机械行业中它可用于零部件组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。目前,机械臂已发展成为柔性制造系统FMS 和柔性制造单元FMC中一个重要组成部分。把机床设备和机械臂共同构成一个柔性加工系统或柔性制造单元,它适应于中、小批量生产,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。当工件变更时,柔性生产系统很容易改变,有利于企业不断更新适销对路的品种,提高产品质量,更好地适应市场竞争的需要。而目前我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械臂的研究和开发直接影响到我国自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械臂的研究设计是非常有意义的。 1.2 国内外研究现状和趋势 目前,在国内外各种机器人和机械臂的研究成为科研的热点,其研究的现状和大体趋势如下: A.机械结构向模块化、可重构化发展。例如关节模块中的伺服电机、减速机、检测系统三位一体化;由关节模块、连杆模块用重组方式构造机器人整机。 B.工业机器人控制系统向基于PC机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构;大大提高了系统的可靠性、易操作性和可维修性。
基于单片机的机械臂控制系统设计与制作
基于单片机的机械臂控制系统设计与制作 电子信息科学与技术专业 学号: 姓名: 班级:电科081 日期:2011.10.26
目录课程设计题目及要求 第一章绪论 1.1 设计题目及要求 1.2 设计内容 第二章硬件设计 2.1 硬件结构图 2.2 各模块工作原理及设计 2.2.1 控制模块 2.2.2 显示模块 2.2.3 按键模块 2.2.4 舵机模块 2.3 软件程序设计 第三章硬件制作以及程序的下载调试 3.1 电路板的制作 3.2 元器件的焊接 3.3 程序的下载与调试 第四章总结 4.1 课程设计体会 4.2 奇瑞参观感受
课程设计题目及要求 题目:基于单片机的机械臂控制系统设计与制作 实习内容: 1,完成基于单片机的机械臂控制系统原理图和PCB的绘制,在基本要求的基础上自己可以作一定的扩展; 2,利用热转印纸、三氯化铁腐蚀液等完成PCB板的制作; 3,完成相应电路的焊接和调试; 4,完成相应软件程序的编写; 5,完成软、硬件的联调; 6,交付实习报告。 实习要求: 1,两人一组,自由搭配,但要遵循能力强弱搭配、男女搭配、考研和不考研的搭配; 2,充分发挥主观能动性,遇到问题尽量自己解决,在基本要求基础上可自由发挥; 3,第一次制作电路,电路不可追求复杂; 4,注意安全!熨斗、烙铁。
第一章绪论 单片机自20世纪70年代问世以来,以其极高的性价比,受到人们的重视和关注,应用广泛,发展迅速。单片机集体积小、重量轻、抗干扰能力强、环境要求低、价格低廉、可靠性高、灵活性好、开发较为容易等众多优点,以广泛用于工业自动化控制、自动检测、智能仪器仪表、家用电器、电力电子、机电一体化设备等各个方面,无论在民间、商业、及军事领域单片机都发挥着十分重要的作用二十一世纪,随着机械化、自动化水平的不断提高,不仅减轻了劳动强度、提高生产率,而且把人类活动从危险、恶劣环境中替换出来。而其中机器人技术,显示出极大的优越性;在宇宙探索、海洋开发以及军事应用上具有重要的实用价值。大力发展机器人技术,一方面能让社会从劳动苦力型转换到福利休闲型,另一方面能极大的提高民众的幸福感。在新时期的世界各国,随着应用日益广泛,机器人技术将不断发展并走向成熟。 本次课程设以单片机作为控制器实现对机械手臂的简单控制。在单片机最小系统的基础上扩展按键接口和舵机接口以及LED显示器,构成最简单的机械臂控制系统。
机械手臂结构
现在很多的工厂都在陆陆续续的采用机械臂来替代人工了,这也是工厂现代化生产的必然趋势,毕竟机械手的工作效率高、工作质量稳定,便于管理,支出较少是令所有的工厂老板所没有办法拒绝的。可是机械臂的结构是怎么样的,相信很多人还是不太了解的,所以下面就来和大家分享一下。 机械手臂根据结构形式的不同分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等。右图为常见的六自由度机械手臂。他有X移动,Y移动,Z移动,X转动,Y转动,Z转动六个自由度组成。这是比较常见的构造形式之一,对于工业应用来说,有时并不需要机械手臂具有完整的六个自由度,而只需其中的一个或几个自由度。直角坐标系机械手臂可以由单轴机械手臂组合而成。单轴机械手臂作为一个组件在工业中应用广泛。下图为单轴机械手臂。单轴机械手臂的组件化大大降低了工业设计的成本,因专业制造商拥有良好的质量保证和批量生产的优势,使用组件比自行设计机械手臂更具优势。常见的直交机械手组合有悬臂式,龙门式,直立式,横立式等样式。 机械手臂一般有3个运动:伸缩、旋转和升降。实现旋转、升降运动是由横臂和产柱去完成。手臂的基本作用是将手爪移动到所需位置和承受爪抓取工件的最大重量,以及手臂本身的重量等。
机械手臂由以下几部分组成: (1)运动元件。如油缸、气缸、齿条、凸轮等是驱动手臂运动的部件。 (2)导向装置。是保证手臂的正确方向及承受由于工件的重量所产生的弯曲和扭转的力矩。 (3)手臂。起着连接和承受外力的作用。手臂上的零部件,如油缸、导向杆、控制件等都安装在手臂上。 此外,根据机械手运动和工作的要求,如管路、冷却装置、行程定位装置和自动检测装置等,一般也都装在手臂上。所以手臂的结构、工作范围、承载能力和动作精度都直接影响机械手的工作性能。 芜湖大正百恒智能装备有限公司是一家专业研发生产销售机械手的智能科技公司,其生产的各类机械手(双臂回斜式机械手、回斜式机械手、双截单臂回斜式机械手、立式注塑机专用机械手、单臂回斜式机械手、中型一轴伺服横走式机械手、中型两轴伺服横走式机械手、悬挂式全伺服机械手、开放式全伺服机械手、中型三轴牛头式伺服机械手、重型三轴牛头式机械手、重型三轴牛头式伺服机械手),类型丰富,控制精度高,性能优异,价格实惠,是您减省工人、提高效率、降低成本、提高产品品质、提升工厂形象的好选择。
机械臂控制系统的设计
机械臂控制系统的设计 1 引言 近年来,随着制造业在我国的高速发展,工业机器人技术也得到了迅速的发展。根据负载的大小可以将机械臂分为大型、中型、小型三类。大型机械臂主要用于搬运、码垛、装配等负载较重的场合;中小型机械臂主要用于焊接、喷漆、检测等负载较小的场合。随着国外工业机器人技术的不断发展,尤其是一些中小型机器人,它们具有体积小、质量轻、精度高、控制可靠的特点,甚至研发出更为轻巧的控制箱,可以在工作区域随时移动,这样大大方便了工作人员的操作。在工业机器人的应用中最常见的是六自由度的机械臂。它是由6个独立的旋转关节串联形成的一种工业机器人,每个关节都有各自独立的控制系统。 2机械臂硬件系统设计 2.1 机械臂构型的选择 要使机器臂的抓持器能够以准确的位置和姿态移动到给定点,这就要求机器人具有一定数量的自由度。机器臂的自由度是设计的关键参数,其数目应该与所要完成的任务相匹配。为了使安装在双轮自平衡机器人上的机械臂能够具有完善的功能,能够完成复杂的任务,将其自由度数目定为6个,这样抓持器就可以达到空间中的任意位姿,并且不会出现冗余问题。在确定自由度后,就可以合理的布置各关节来分配这些自由度了。 由于计算数值解远比封闭解费时,数值解很难用于实时控制,这样,后3个关节就确定了末端执行器的姿态,而前3个关节确定腕关节原点的位置。采用这种方法设计的机械臂可以认为是由定位结构及其后面串联的定向结构或手腕组成的。这样设计出来的机器人都具有封闭解。另外,定位结构都采用简单结构连杆转角为0或90°的形式,连杆长度可以不同,但是连杆偏距都为0,这样的结构会使推倒逆解时计算简单。 定位机构是涉及形式主要有以下几种:SCARA型机械臂,直角坐标型机械臂,圆柱坐标型机械臂,极坐标型机械臂,关节坐标型机械臂等。 SCARA机械臂是平面关节型,不能满足本文对机械臂周边3维空间任意抓取的要求;直角坐标型机械臂投影面积较大,工作空间小;极坐标方式需要线性移
【CN110053043A】一种工业机器人碰撞检测方法、装置、电子设备及介质【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910163469.X (22)申请日 2019.03.05 (71)申请人 华南理工大学 地址 510640 广东省广州市天河区五山路 381号 (72)发明人 张铁 洪景东 (74)专利代理机构 广州粤高专利商标代理有限 公司 44102 代理人 何淑珍 黄海波 (51)Int.Cl. B25J 9/16(2006.01) (54)发明名称 一种工业机器人碰撞检测方法、装置、电子 设备及介质 (57)摘要 本发明公开了一种基于包络线的工业机器 人碰撞检测方法、装置、设备及介质,所述方法包 括步骤:S1、当机器人处于稳定运动状态时,得到 各关节的力矩误差曲线L;S2、设置针对各力矩误 差曲线L的类包络曲线;S3、实时更新每个离散时 间点各关节的上包络曲线L up 和下包络曲线L down , 并计算每个离散时间点各关节的上包络曲线L up 和下包络曲线L down 的差值;S4、当各关节上包络 曲线L up 和下包络曲线L down 的差值都大于所述碰 撞检测阈值L thr 时,则判定机器人存在碰撞并执 行步骤S5;S5、暂停机器人的运动,显示发生碰撞 的关节并报警。本发明不需要额外的设备和复杂 的算法,具有低成本和较高的实用性,可广泛适 用于工业机器人的生产工作过程中。权利要求书2页 说明书7页 附图1页CN 110053043 A 2019.07.26 C N 110053043 A
1.一种基于包络线的工业机器人碰撞检测方法,其特征在于,包括步骤: S1、当机器人处于稳定运动状态时,比较各关节的实时计算力矩与实际力矩得到各关节的力矩误差曲线L; S2、设置针对各力矩误差曲线L的类包络曲线,所述类包络曲线位于各力矩误差曲线L 两侧,包括上包络曲线L up 和下包络曲线L down ,并满足L down (k)≤L(k)和L up (k)≥L(k),其中,k 为时间点,L(k)为k时间点力矩误差曲线L对应的值,L up (k)为k时间点上包络曲线对应的值,L down (k)为k时间点下包络曲线对应的值; S3、实时更新每个离散时间点各关节的上包络曲线L up 和下包络曲线L down ,并计算每个离散时间点各关节的上包络曲线L up 和下包络曲线L down 的差值; S4、当各关节的各关节的上包络曲线L up 和下包络曲线L down 的差值都小于等于设定的碰撞检测阈值L thr >0时,判定机器人没有碰撞发生,机器人保持预设的稳定运行状态并返回步骤S1;当各关节上包络曲线L up 和下包络曲线L down 的差值都大于所述碰撞检测阈值L thr 时,则判定机器人存在碰撞并执行步骤S5; S5、暂停机器人的运动,显示发生碰撞的关节并报警。 2.根据权利要求1所述的基于包络线的工业机器人碰撞检测方法,其特征在于,所述的步骤S1中具体包括: 当机器人处于稳定运动状态时,通过机器人的动力学模型,结合机器人的运动状态实时计算机器人运动过程中各关节力矩得到计算力矩;将所述计算力矩与关节的实时实际力矩进行比较,得到各关节的力矩误差曲线L。 3.根据权利要求1所述的基于包络线的工业机器人碰撞检测方法,其特征在于,所述的步骤S3中,每个离散时间点各关节的上包络曲线L up 和下包络曲线L down 的的更新过程包括步骤: S31、计算类包络线的k时间点的均值线L mid 的值: L mid (k)=L up (k)/2+L down (k)/2 其中,L mid 为类包络线的均值线,L mid (k)为k时间点均值线L mid 对应的值; S32、根据k时间点力矩误差曲线L对应的值L(k)与所述类包络线的k时间点的均值线L mid 的值的大小关系计算k+1时间点上包络曲线L up 和下包络曲线L down 的值: 其中,α为预设的类包络线增大和减小的变化速率,其值大于所述力矩误差曲线L的平均斜率; S33、调整k+1时间点上包络曲线L up 和下包络曲线的值: 若L up (k+1)
(机械制造行业)工业机械手设计说明书
第一章引言 1.1 液压机械手概述 液压传动机械手是以压缩液体的压力来驱动执行机构运动的机械手。其主要特点是:介质源极为方便,输出力小,液压动作迅速,结构简单,成本低。但是,由于空气具有可压缩的特性,工作速度的稳定性较差,冲击大,而且气源压力较低,抓重一般在30公斤以下,在同样抓重条件下它比液压机械手的结构大,所以适用于高速、轻载、高温和粉尘大的环境中进行工作。 液压技术有以下优点: (1)体积小、重量轻,因此惯性力较小,当突然过载或停车时,不会发生大的冲击; (2)能在给定范围内平稳的自动调节牵引速度,并可实现无极调速; (3)换向容易,在不改变电机旋转方向的情况下,可以较方便地实现工作机构旋转和直线往复运动的转换; (4)液压泵和液压马达之间用油管连接,在空间布置上彼此不受严格限制; (5)由于采用油液为工作介质,元件相对运动表面间能自行润滑,磨损小,使用寿命长;(6)操纵控制简便,自动化程度高; (7)容易实现过载保护。 1.2 液压机械手的设计要求 1.2.2 课题的设计要求 本课题将要完成的主要任务如下: (1)机械手为通用机械手,因此相对于专用机械手来说,它的适用面相对较广。 (2)选取机械手的座标型式和自由度。 (3)设计出机械手的各执行机构,包括:手部、手腕、手臂等部件的设计。为了使通用性更强,手部设计成可更换结构,不仅可以应用于夹持式手指来抓取棒料工件,在工业需要的时候还可以用气流负压式吸盘来吸取板料工件。 (4)液压传动系统的设计 本课题将设计出机械手的液压传动系统,包括液压元器件的选取,液压回路的设计,并绘出液压原理图。 (5)机械手的控制系统的设计 本机械手拟采用可编程序控制器(PLC)对机械手进行控制,本课题将要选取PLC型号,根
三关节机械臂设计
南京工业大学学士学位论文 三关节机械臂及其控制系统设计 摘要 随着科技的不断进步,机械臂特别是仿人型机械臂的发展非常迅速。其在人们的日常生活,生产中开始扮演着不可或缺的角色。本文呈现的是一种仿人型机械臂,其主要特点在与多样化,简单化,直觉化的人机交互方式。将以往复杂的主从式操作,诸如摇杆控制等,转化为简单的触摸屏操作,同时辅佐以双目机器视觉,还可以实现通过人的手势来控制机械臂动作,实现了直觉化的控制。 为了能高效稳定地控制机械臂,本设计使用了双控制系统协同作业:下位控制系统使用嵌入式系统—ARM 微处理器(S3C2440 芯片)—实现机械臂的基本动作的控制封装,包括定位算法以及运动控制等;上位控制系统是在PC 上实现的,控制软件使用VC++ 6.0 编写,主要实现机器视觉的相关运算,并将运算结果通过串口通信,传递给下位系统—ARM 微处理器,并最终转换成机械臂的动作。 整个设计过程包含了底层的驱动硬件设计:舵机的选型与控制;机械结构设计:结构设计,负载校核;控制系统电路设计;上位,下位软件的编写:舵机的控制方式—PWM 脉宽调制,点定位算法,轨迹控制算法,机器视觉算法;还编写了3 维软件进行仿真:三维的投影算法,及贴面,光照,面的排序算法;并最终制作成实物进行演示,在末端装上笔之后,能够进行简单的书写。 关键字:触摸屏机器视觉嵌入式系统运动控制
Abstract Three joint mechanical arm and its control system design Abstract As technology advances, mechanical arm especially humanoid type of mechanical arm is developing fast. This paper presents a humanoid type of mechanical arm.Its main characteristics is multiple ,simple, intuitive man-machine interactive way.Touch screen control and machine version are introduced covering for complex operation ,such as joystick control. Mechanical arm is control by daily gestures which makes it much easier to use a mechanical arm. In order to control the mechanical arm stabily, this design uses the dual control system under coordinated assignments: one control system uses embedded system – ARM microprocessor (S3C2440 chip) - realizing the basic mechanical arm movement control encapsulation, including localization algorithm and motion control, etc.;Upper control system is on the PC platform, using vc + + 6.0 for software, realizing machine vision calculation, and will transmit results through serial communication, to lower level system -the ARM microprocessor, leading to mechanical arm movements The whole design process contains rock-bottom drive hardware design: steering gear selection and control; Mechanica l structure design structure design, load checking; Control system circuit design; Superior position software: steering gear -- PWM pulse width modulation, point positioning algorithm, trajectory control algorithm, machine vision algorithms; And finally make physical for demonstration realizing writing with pen loaded. Key words: Touch screen;Machine version;embedded systems
机械臂结构设计
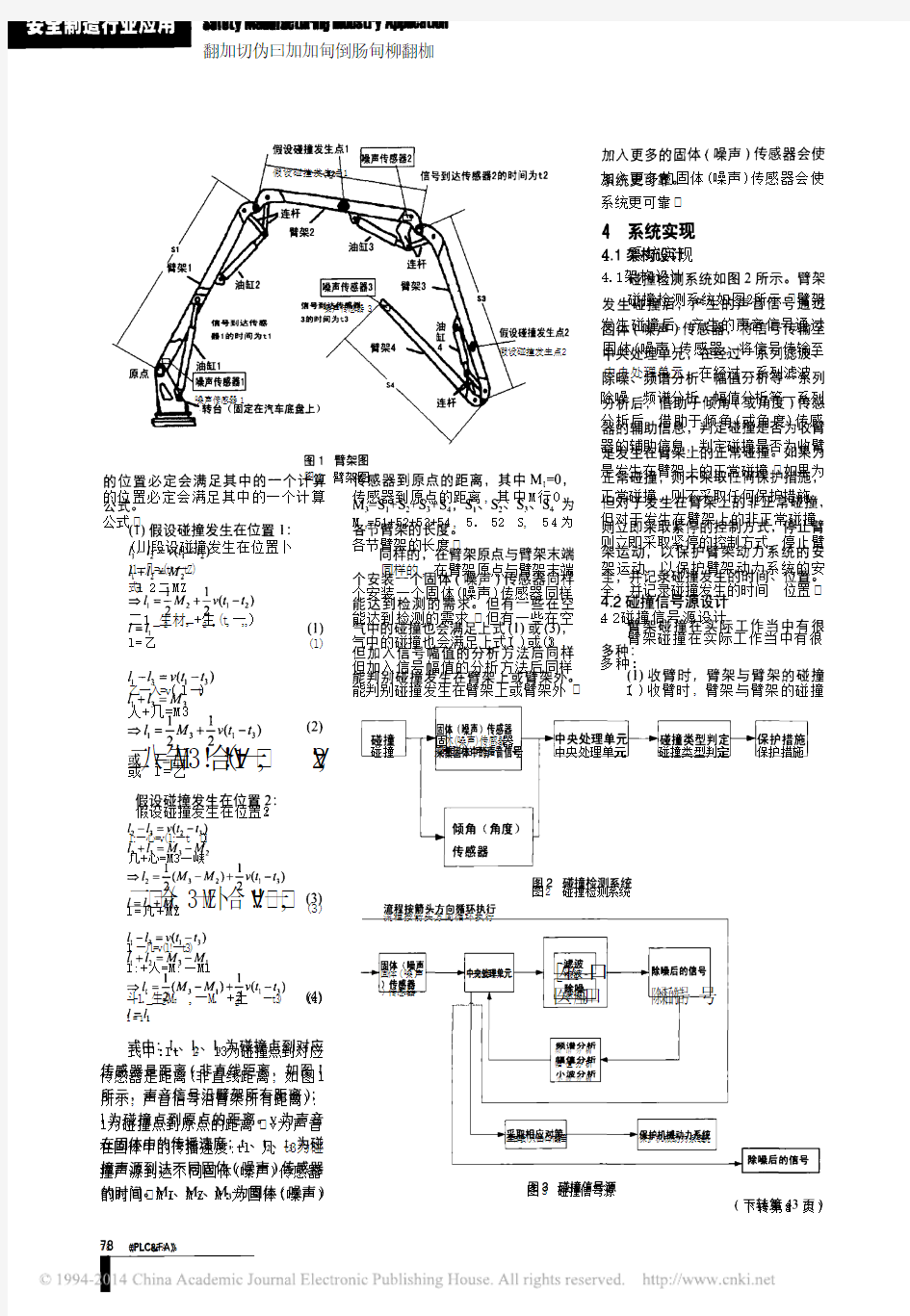
工业机械臂结构设计 1)连杆 设计步骤如下: 1.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
2.点选拉伸特征图标, 在属性管理器中输入:终止条件:两侧对称,拉伸高度值15mm,确定,完成实体造型1。 3.选择“右视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
4.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值61mm,确定,完成实体造型2。 5.选择图示边线,点选圆角特征按钮,添加半径为5mm的圆角。完成连杆实体造型如图所示。 2)连接件1 1.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
2.点选拉伸特征图标, 在属性管理器中输入:终止条件:两侧对称,拉伸高度值4mm,确定,完成实体造型。 3)连接件2 1.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。 2.点选拉伸特征图标,在属性管理器中输入终止条件:两侧对称,拉伸高度值15mm,确定,完成实体造型。 3.选择“上视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
4.点选切除-拉伸特征图标, 在属性管理器中输入终止条件:给定深度,拉伸高度值12mm,确定,完成实体造型2。 5.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。 6.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值40mm,确定,完成实体造型3。7.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。 8.点选拉伸特征图标,在属性管理器中输入终止条件:两侧对称,拉伸高度值12mm,确定,完成实体造型。 9.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
关节型机器人机械臂结构设计
本科毕业论文 关节型机器人 机械臂结构设计 姓名 学院机械工程学院 专业机械设计制造及其自动化指导教师 完成日期2012年5月
全日制本科生毕业设计(论文)承诺书 本人郑重承诺:所呈交的毕业设计(论文)关节型机器人机械臂结构设计是在导师的指导下,严格按照学校和学院的有关规定由本人独立完成。文中所引用的观点和参考资料均已标注并加以注释。论文研究过程中不存在抄袭他人研究成果和伪造相关数据等行为。如若出现任何侵犯他人知识产权等问题,本人愿意承担相关法律责任。 承诺人(签名): 日期:
关节型机器人机械臂结构设计 摘要 随着现代科学技术的发展,机器人技术越来越受到广泛关注,在工业生产日益现代化的今天,机器人的使用变得越来越普及。因此,对于机器人技术的研究也变得越来越迫切,尤其是工业机器人方面。本论文针对工业机器人的工作领域特点,设计了一款拥有6个自由度的机械人,尤其针对机器人机械臂进行详细的设计,确定了其传动结构图,选择合适的电机,齿轮,液压缸,等各零部件。以及对各关节传动轴的设计和进行齿轮计算和校核完成其设计,该机器人具有刚性好,位置精度高、运行平稳的特点。 关键词:关节型机器人,6自由度,传动设计,零件计算校核
ARTICULATED ROBOT MANIPULATOR STRUCTURE DESIGN ABSTRACT With the development of modern science and technology, robotics, more and more attention in an increasingly modernized industrial production, the use of robots becoming more and more popular. Therefore, robotics has become increasingly urgent, especially industrial robots. For this area, the authors designed a robot with 6 degrees of freedom,especially for the detailed design of the robot arm,determine the transmission chart,thus select the appropriate motor,gear,hydraulic cylinder,and so on.And the design of the joint drive shaft and gear calculation and verification of completion of its design,the robot has a good rigidity,high positional accuracy and smooth run characteristics. KEYWORDS:articulated robot; 6 degrees of freedom; transmission design; parts calculation checking
一种多关节智能机械手臂控制系统设计
一种多关节智能机械手臂控制系统设计 摘要:在制造业飞速发展的今天,工厂和企业为了提高自己生产上的绩效,而且也可以在一定程度上提高产品质量,还可以提高企业整体机械自动化的程度。工业机器人和工业自动化的水平关系到一个国家整体制造业发展的水准,所以国家的制造业要想得以快速发展,就必须要意识到工业机器人和工业自动化建设的重要性。因此,本文首先概述了机械手臂的组成和工作模式;其次,根据机械手臂以上的基本理论和原理的基础上,设计一种多关节智能机械手臂控制系统,进而使得机械手臂的工作效率大大提高,智能性也逐步增强。 关键词:机械手臂;智能;控制系统;设计 前言 由于机械手臂是近现代制造业发展中出现的新型的技术形式,它的逐步发展使得企业整体的生产水平得以进一步提高,因此在这种条件下开发研制一种多关节智能机械手臂,但是这种机械手臂所要涉猎学科广泛,包括机械学、力学和计算机信息技术等,这就使得机械手臂在控制上常常出现一些不足,因此本文主要基于机械手臂的工作原理和构成,采用CAN总线对于机械手臂进行智能控制,可以使得机械手臂的控制能力大大提高。 1.概述机械手臂的组成和工作模式 1.1机械手臂的组成 机械手臂主要是由控制系统和驱动装置、执行装置组成。首先,执行装置主要由手掌和腕部、手臂等组成,主要的用来抓取一些部件和工具,而且它可以根据不同抓取物的大小和形状变换不同的方式抓取;驱动装置主要是使得手臂变换不同的形态对于抓取物进行灵活抓取;控制系统主要是利用网络和多媒体信息技术对于整个机械手臂的自由度进行控制,进而使得机械手臂的自由度进一步提升,相对于以前的点动和连续性控制效率大大提高。由于现在大多的工厂采用伺服电动和计算机信息技术进行机械手臂控制的[1]。 1.2机械手臂的工作模式 机械手臂的伺服驱动装置,主要是通过关节的驱动对于机械手的基本动作进行控制,目前机械手臂主要是采用闭环控制的原理进行控制。伺服电机的基本原理是计算主机给出的关节应该操作的位置和计算机探测到的关节应该操作之间出现的误差,该误差通过数据模型的转换和功放之后,这样可以使得机械手臂和关节操作更加精准。各种伺服电机是现在经常使用的驱动装置,由于一般伺服电机输出的速率较高,输出转矩小,但是关节带动的力度和转速不足,但是力矩却较大。因此,在电机与负载间需要一种优质的驱动装置,使得转矩和转速在一定意义上达成一致。
机械手设计汇总
第一章( 第二章绪论 课题研究的目的及意义 随着工业自动化程度的提高,工业现场的很多易燃、易爆等高危及重体力劳动场合必将由机器人所代替。这一方面可以减轻工人的劳动强度,另一方面可以大大提高劳动生产率。例如,目前在我国的许多中小型汽车生产以及轻工业生产中,往往冲压成型这一工序还需要人工上下料,既费时费力,又影响效率。为此,我们把上下料机械手作为我们研究的课题。 工业机械手是工业物流自动化中上网重要装置之一,是当今世界新技术革命的一个重要标志。工业机械手是典型的机电一体化产品。 工业机械手的产生和推广是社会生产和发展的需要,也是现代生产和科技发展的新技术产品。工业机械手已经在工业生产、资源开发、社会服务、排险救灾以及军事技术等方面发挥着愈来愈大的应用。 工业机械手的应用和推广已经并将获得极大的效益。例如在机械制造工业、汽车工业等生产中采用电焊、弧焊、喷漆等机械手,可以大大提高劳动生产率,保证产品质量,改善劳动条件。又如在微电子、医药等生产部门,采用机械手操作,可以消除人对产品的污染、确保产品质量。 机械手可以在有毒、噪音、高温、易燃、易爆等危险有害的环境中代替人长期稳定的工作,从根本上解决了操作者的安全保障问题。因而在这方面应用和推广机器人技术是十分迫切和必要的。 近代工业机械手的原型可以从本世纪40代算起。当时适应核技术的发展需要开发了处理放射性材料的主从机械手。50年代初美国提出了“通用重复操作机器人”的方案,59年研制出第一工业机械手原型。由于历史条件和技术水平关系,在60年代机械手发展较慢。进入70年代后,焊接、喷漆机械手相继在工业中应用和推广。随着计算机技术、控制技术、人工智能的发展、机械手技术得到迅速发展,出现了更为先进的可配视觉、触觉的机器人所应用的机械手。如美国Unimation公司PUMA系列工业机器人相关的机械手,即使由直流伺服驱动、关节式结构、多cpu微机控制、采用专用语言编程的技术先进的机械手。到了80、90年代机器人及相关的机械手开始在工业上普及应用。据统计1980年全世界约有两万台机器人在工业上应用,而到今年增长更快。今年已近开发出
三关节机械臂设计
三关节机械臂及其控制系统设计 摘要 随着科技的不断进步,机械臂特别是仿人型机械臂的发展非常迅速。其在人们的日常生活,生产中开始扮演着不可或缺的角色。本文呈现的是一种仿人型机械臂,其主要特点在与多样化,简单化,直觉化的人机交互方式。将以往复杂的主从式操作,诸如摇杆控制等,转化为简单的触摸屏操作,同时辅佐以双目机器视觉,还可以实现通过人的手势来控制机械臂动作,实现了直觉化的控制。 为了能高效稳定地控制机械臂,本设计使用了双控制系统协同作业:下位控制系统使用嵌入式系统—ARM 微处理器(S3C2440 芯片)—实现机械臂的基本动作的控制封装,包括定位算法以及运动控制等;上位控制系统是在PC 上实现的,控制软件使用VC++ 6.0 编写,主要实现机器视觉的相关运算,并将运算结果通过串口通信,传递给下位系统—ARM 微处理器,并最终转换成机械臂的动作。 整个设计过程包含了底层的驱动硬件设计:舵机的选型与控制;机械结构设计:结构设计,负载校核;控制系统电路设计;上位,下位软件的编写:舵机的控制方式—PWM 脉宽调制,点定位算法,轨迹控制算法,机器视觉算法;还编写了3 维软件进行仿真:三维的投影算法,及贴面,光照,面的排序算法;并最终制作成实物进行演示,在末端装上笔之后,能够进行简单的书写。 关键字:触摸屏机器视觉嵌入式系统运动控制
. Three joint mechanical arm and its control system design Abstract As technology advances, mechanical arm especially humanoid type of mechanical arm is developing fast. This paper presents a humanoid type of mechanical arm.Its main characteristics is multiple ,simple, intuitive man-machine interactive way.Touch screen control and machine version are introduced covering for complex operation ,such as joystick control. Mechanical arm is control by daily gestures which makes it much easier to use a mechanical arm. In order to control the mechanical arm stabily, this design uses the dual control system under coordinated assignments: one control system uses embedded system – ARM microprocessor (S3C2440 chip) - realizing the basic mechanical arm movement control encapsulation, including localization algorithm and motion control, etc.;Upper control system is on the PC platform, using vc + + 6.0 for software, realizing machine vision calculation, and will transmit results through serial communication, to lower level system -the ARM microprocessor, leading to mechanical arm movements The whole design process contains rock-bottom drive hardware design: steering gear selection and control; Mechanica l structure design structure design, load checking; Control system circuit design; Superior position software: steering gear -- PWM pulse width modulation, point positioning algorithm, trajectory control algorithm, machine vision algorithms; And finally make physical for demonstration realizing writing with pen loaded. Key words: Touch screen;Machine version;embedded systems
多关节机械臂运动控制中的重力因素分析
1 双关节旋转空间机械臂动力学模型 γ 均表示作用在机械臂关节处的控制力矩; 2 均表示机械臂两连杆转动时经过的角度; 示机械臂两连杆的质量;l和l均表示机械臂两连杆的长度。 空间机械臂的运动控制设计 空间机械臂的动力学设计。结合图 间机械臂的动力学模型,得出空间机械臂两连杆的质心向量表达式为: 轴上的单位向量。设定空间其中,(i=1,2)表示X i i T,由此可以推断机械臂相邻两连杆的旋转变换矩阵为 i+1 出位于连杆i上的力平衡方程式如下: i F =i f i-i+1i T i+1f i+1 i 由于该空间机械臂系统的机械手末端不受外力作用,
96 Computer CD Software and Applications M (θ)表示惯性矩阵;V (θ, 哥氏力及离心力矩阵;G (θ)表示重力载荷向量矩阵;(θ, 个关节的重力载荷向量矩阵的表达式为:结合上述机械臂动力学模型来看,当我们对机械臂的轨迹跟踪进行控制时,若θ为常值,那么轨迹跟踪控制的 e=θd -θ其中, (θ)表示重力载荷向量矩阵的估算值。此时应分地面装调阶段和空间应用阶段两种情况讨论:参考文献: [1]郝峰.空间机械臂回转臂式微重力模拟装置研究[D].哈尔滨工业大学,2010,06,01. [2]陈钢,张龙,贾庆轩,孙汉旭.基于主任务零空间的空间机械臂重复运动规划[J].宇航学报,2013,08(01). 作者简介:孙承志(1975-),男,江苏赣榆人,讲师,硕士,主要研究方向:智能检测、目标识别与跟踪、运动控制等。作者单位:三江学院电气与自动化工程学院,南京 210012 , , 另外,在期望位置方面,θ 图a 1号关节的控制输入 图b 2号关节的控制输入图2 空间机械臂各关节的控制力矩仿真曲线图图a 1号关节位置跟踪输出 图b 2号关节的位置跟踪输出 图3 空间机械臂各关节跟踪输出仿真曲线图
机械手课程设计书
课程设计说明书 2015 年 6 月9 日
目录 摘要 (2) 第1章概述 (3) 1.1设计目的 (3) 1.2课题的内容和要求 (4) 1.3进度安排 (4) 1.4设计进度安排 (4) 1.5基本要求 (5) 第2章课程设计的总体方案 (6) 2.1总体方案的确定 (6) 2.2 机械结构的设计 (6) 2.3 软件设计 (6) 第3章机械部分设计 (7) 3.1 元器件选型 (7) 3.2 机械结构构件及说明 (7) 3.3 工作台外形尺寸及重量初步估算 (8) 3.4 滚珠选择 (8) 3.5滑块导轨的选择与校核 (8) 3.6 弯曲应力σm的计算 (9) 3.7选择联轴器的考虑因素 (10) 3.8 轴承的选用与校核 (11) 第4章控制系统的设计 (14) 4.1 控制系统硬件电路的设计 (14) 4.2控制系统软件编程设计 (16) 参考资料 (18) 附录一:cad图纸 (19) 附录二:proe图 (20) 附录三:程序 (22)
摘要 机械手技术涉及到电子、机械学、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。随着工业自动化发展的需要,机械手在工业应用中越来越重要。文章主要叙述了机械手的设计过程,文章中介绍了机械手的设计理论与方法。 本课题以52单片机为核心设计,通过AutoCAD,proe技术对机械手进行结构设计,实现所需要的功能。 关键词:机械手、52单片机、AutoCAD、Proe
第1章概述 机械化、自动化已成在现代工业中突出的主题。化工等连续性生产过程的自动化已基本得到解决。但在机械工业中,加工、装配等生产是不连续的,机器人的出现并得到应用,为这些作业的机械化奠定了良好的基础。 机械手,多数是指程序可变(编)的独立的自动抓取、搬运工件、操作工具的装置(国内称作工业机械手或通用机械手)。 机械手是一种具有人体上肢的部分功能,工作程序固定的自动化装置。机械手具有结构简单、成本低廉、维修容易的优势,但功能较少,适应性较差。目前我国常把具有上述特点的机械手称为专用机械手,而把工业机械手称为通用机械手。 简而言之,机械手就是用机器代替人手,把工件由某个地方移向指定的工作位置,或按照工作要求以操纵工件进行加工。 机械手一般分为三类。第一类是不需要人工操作的通用机械手,也即本文所研究的对象。它是一种独立的、不附属于某一主机的装置,可以根据任务的需要编制程序,以完成各项规定操作。它是除具备普通机械的物理性能之外,还具备通用机械、记忆智能的三元机械。第二类是需要人工操作的,称为操作机。工业中采用的锻造操作机也属于这一范畴。第三类是专业机械手,主要附属于自动机床或自动生产线上,用以解决机床上下料和工件传送。这种机械手在国外通常被称之为“Mechanical Hand”,它是为主机服务的,由主机驱动。除少数外,工作程序一般是固定的,因此是专用的。 机械手按照结构形式的不同又可分为多种类型,其中关节型机械手以其结构紧凑,所占空间体积小,相对工作空间最大,甚至能绕过基座周围的一些障碍物等这样一些特点,成为机械手中使用最多的一种结构形式。 要机械手像人一样拿取东西,最简单的基本条件是要有一套类似于指、腕、臂、关节等部分组成的抓取和移动机构——执行机构;像肌肉那样使手臂运动的驱动-传动系统;像大脑那样指挥手动作的控制系统。这些系统的性能就决定了机械手的性能。一般而言,机械手通常就是由执行机构、驱动-传动系统和控制系统这三部分组成 1.1设计目的 《单片机原理及接口技术课程设计》是机械电子工程专业的学生在完成《单片机原理及接口技术》等专业课程的学习之后,进行综合性设计训练的实践性教学环节。目的是在老师的指导下,使学生通过课程设计,对所学课程理论知识进行一次系统的回顾检查、复习和提
基于PLC的机械手臂控制系统设计
基于PLC机械手控制系统设计 摘要 随着现代工业技术的发展,工业自动化技术越来越高,生产工况也有趋于恶劣的态势,这对一线工人的操作技能也提出了更高的要求,同时操作工人的工作安全也受到了相应的威胁。工人工作环境和工作内容也要求理想化简单化,对于一些往复的工作由机械手远程控制或自动完成显得非常重要。这样可以避免一些人不能接触的物质对人体造成伤害,如冶金、化工、医药、航空航天等。 在机械制造业中,机械手应用较多,发展较快。目前主要应用于机床、模锻压力机的上下料以及焊接、喷漆等作业,它可以按照事先制定的作业程序完成规定的操作,有些还具备有传感反馈能力,能应付外界的变化。应用机械手,有利于提高材料的传送、工件的装卸、刀具的更换以及机器的装配等的自动化程度,从而可以提高劳动生产率,降低生产成本,加快实现工业生产机械化和自动化的步伐。 本文主要论述了基于PLC设计的机械手控制系统。首先,对可能用到的可编程控制器进行了相关的介绍,再选择设计所用到的PLC型号。然后,通过对机械手的控制方式及各功能的实现方式进行研究,确定各功能的实现方案和设计控制系统所用到的器材。最后,对PLC控制系统的软件程序和硬件结构进行设计。 关键词:工业自动化;可编程控制器;机械手;远程控制;传感反馈
Abstract With the development of modern industrial technology, industrial automation technology is more and more high, the production conditions also tended to bad situation, the front-line workers skills also put forward higher requirements, and the operation safety of workers has also been a corresponding threat. The workers work environment and work content also requires ideal for some simple, reciprocating work by robot remote control or automatic completion is very important This can avoid some people can not contact with the human body damage, such as metallurgy, chemical, pharmaceutical, aerospace, etc.. In the mechanical manufacturing industry, the application of mechanical hand more, the development of faster. At present, it is mainly used in machine tools, forging press under the material and welding, painting and other operations, it can be in accordance with pre established operating procedures to complete the prescribed operation, and some also have with sensor feedback ability, can cope with external changes. Application of the manipulator, to improve the material transfer, workpiece loading and unloading, tool replacement and machine assembly automation, which can improve labor productivity, reduce production costs, accelerate the pace of industrial production mechanization and automation. This paper mainly discusses the design of manipulator control system based on PLC. First, the possible use of the programmable controller is related to the introduction, and then choose the design of the PLC model. Then, through the control mode of the manipulator and the realization way of each function, the realization scheme of each function and the equipment used in the design control system are determined. Finally, the software program and hardware structure of PLC control system are designed. Keywords: industrial; automation programmable controller ; manipulator; Remote control;sensor feedback