FANUC变量对照表
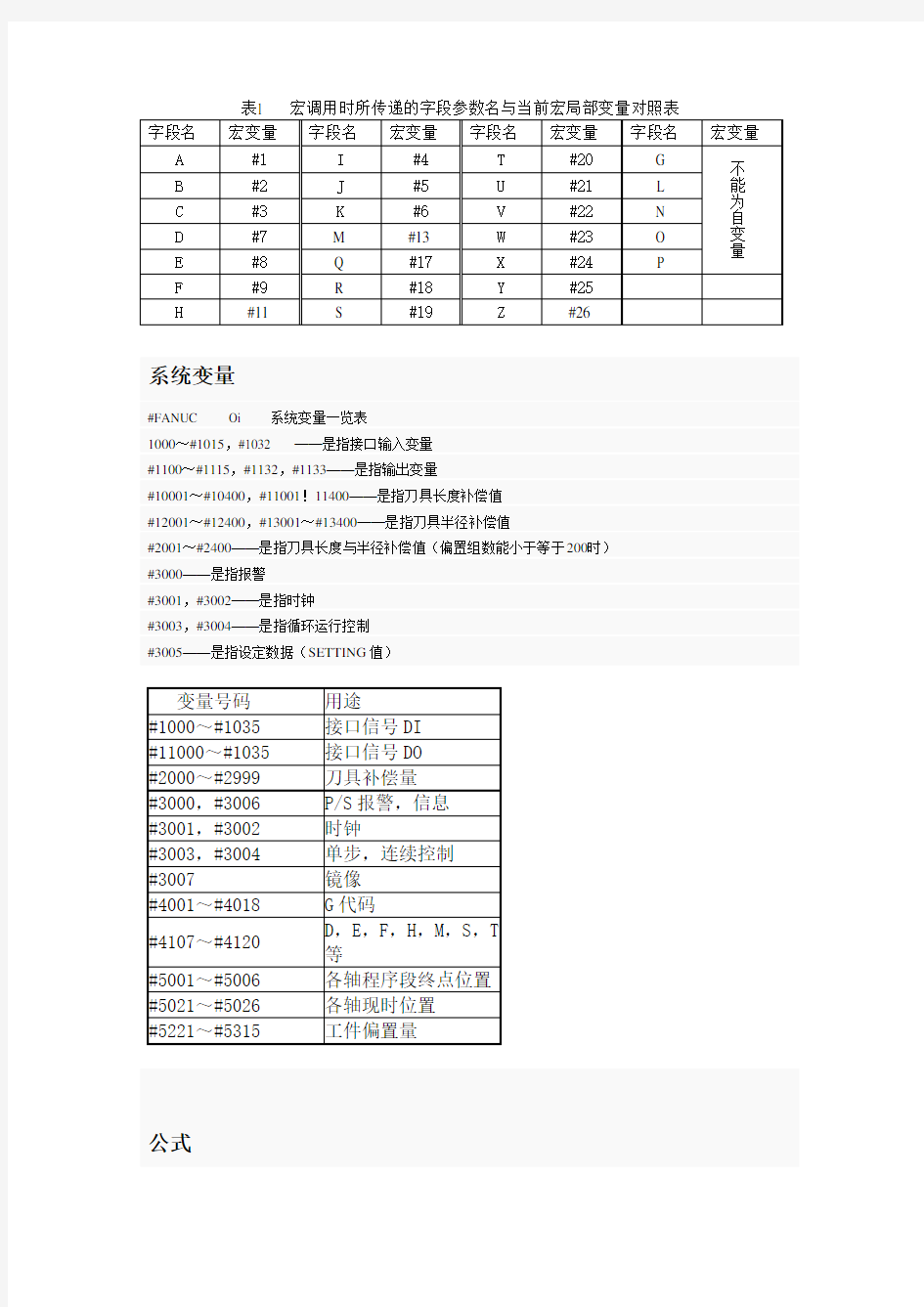
表1 宏调用时所传递的字段参数名与当前宏局部变量对照表
字段名
宏变量 字段名
宏变量 字段名
宏变量 字段名
宏变量
A #1 I #4 T #20 G 不能为自变量
B #2 J #5 U #21 L
C #3 K #6 V #22 N
D #7 M #13 W #23 O
E #8 Q #17 X #24 P
F #9 R #18 Y #25 H
#11
S
#19
Z
#26
系统变量
#FANUC Oi 系统变量一览表
1000~#1015,#1032 ——是指接口输入变量 #1100~#1115,#1132,#1133——是指输出变量
#10001~#10400,#11001!11400——是指刀具长度补偿值 #12001~#12400,#13001~#13400——是指刀具半径补偿值
#2001~#2400——是指刀具长度与半径补偿值(偏置组数能小于等于200时) #3000——是指报警 #3001,#3002——是指时钟 #3003,#3004——是指循环运行控制 #3005——是指设定数据(SETTING 值)
变量号码 用途
#1000~#1035 接口信号DI #11000~#1035 接口信号DO #2000~#2999 刀具补偿量 #3000,#3006 P/S 报警,信息 #3001,#3002 时钟
#3003,#3004 单步,连续控制 #3007
镜像 #4001~#4018 G 代码
#4107~#4120 D ,E ,F ,H ,M ,S ,T 等
#5001~#5006 各轴程序段终点位置 #5021~#5026 各轴现时位置 #5221~#5315
工件偏置量
公式
在数控铣削加工过程中通常采用参数方程式进行编程。
椭圆的参数方程:x=acosα,y=bsinα
双曲线的参数方程:x=asecα,y=btanα 7 p( E# {* k3 ]
抛物线参数方程的一种形式:x=2pt2,y=2pt 8 F. _5 }: S, c
圆的参数方程:x=rcosα,y=rsinα
直线的参数方程:x=x0+tcosα,y=y2+tsinα , h$ P6 v4 ^( }1 c5 H/ o; f( k+ V
根据笛卡尔右手定则,在数控铣床上平面主要是X0Y平面上加工工件,所以上述公式主要以X、Y、α、t作为变量,其中a、b、r是常数。- p5 t0 B$ T U% _& H* W
2 运算符与表达式
(1)算术运算符:+,-,*,/
(2)条件运算符:EQ(=),NE(≠),GT(>),GE(≥),LT(<=),LE(≤)
(3)逻辑运算符:AND,OR,NOT
(4)函数:SIN,COS,TAN,ATAN,A TAN2,ABS,INT,SIGN,SQRT,EXP
(5)表达式:用运算符连接起来的常数,宏变量构成表达式。
FANUC高速高精加工的参数调整图文稿
F A N U C高速高精加工 的参数调整 文件管理序列号:[K8UY-K9IO69-O6M243-OL889-F88688]
铣床、加工中心高速、高精加工的参数调整 (北京发那科机电有限公司王玉琪) 使用铣床或加工中心机床加工高精度零件(如模具)时,应根据实际机床的机械性能对CNC系统(包括伺服)进行调整。在FANUC的AC电机的参数说明书中叙述了一般调整方法。本文是参数说明书中相关部分的翻译稿,最后的“补充说明”叙述了一些实际调试经验和注意事项,仅供大家参考。 对于数控车床,可以参考此调整方法。但是车床CNC系统无G08和G05功能,故车床加工精度(如车螺纹等)不佳时,只能调整HRV参数和伺服参数。Cs控制时还可调整主轴的控制参数。 目录 ⑴概述 i系列CNC(15i/16i/18i)的伺服因为使用了HRV2和HRV3控制(21i为选择功能),改善了电流回路的响应,因此可使速度回路和位置回路设定较高而稳定的增益值。 图使用伺服HRV控制后的效果 速度回路和位置回路的高增益,可以改善伺服系统的响应和刚性。因此可以减小机床的加工形状误差,提高定位速度。 由于这一效果,使得伺服调整简化。HRV2控制可以改善整个系统的伺服性能。伺服用HRV2调整后,可以用HRV3改善高速电流控制,因此可进行高精度的机械加工。 “高速、高精加工的伺服参数调整”。 2
图伺服HRV控制的效果实例 ⑵适用的伺服软件系列号及版本号 90B0/A(01)及其以后的版本(用于15i,16i,18i和21i,但必须使用320C5410伺服卡)。 ⑶调整步骤概况 HRV2和HRV3控制的调整与设定大致用以下步骤: ①) 电流回路的周期从以前的250μs降为125μs。电流响应的改善是伺服性能改善的基础。 ②) 进行速度回路增益的调整时,对于速度回路的高速部分,应该使用速度环比例项的高速处理功能。 电流环控制周期时间的降低使电流响应得以改善,使用振荡抑制滤波器使可消除机械的谐振,这样可提高速度回路的振荡极限。 ③ 机床可在某个频率下产生谐振。此时,用消振滤波器消除某一频率下的振荡是非常有效的。 ④ 当伺服系统的响应较高时,可能会出现加工的形状误差取决于CNC指令的扰动周期的现象。这种现象可用精细加/减速功能消除。 速度环使用尽可能高的回路增益可以改善整个伺服系统的性能。 ⑤ 使用预读功能的前馈,可以消除伺服的时滞,从而可减小加工的形状误差。一般,前馈系数为97%—99%。 ⑥*6)
发那科参数大全
发那科系统参数总表[1] 系统参数不正确也会使系统报警。另外,工作中常常遇到工作台不能回到零点、位置显 示值不对或是用MDI键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC信号或连线无误,应检查有关参数。 一.16系统类参数 0:OFF 1:ON 1.SETTING 参数(与设定相关的参数) 参数号符号意义16-T 16-M 0000/0 TVC 代码竖向校验O:不进行1:进行 0000/1 ISO EIA/ISO代码O:EIA代码1:ISO代码0000/2 INI MDI方式公/英制O:米制1:英制 0000/5 SEQ 自动加顺序号O:不进行1:进行 0002/0 RDG 远程诊断O不进行1进行 0002/7 SJZ 手动参考位置返回0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。1只用减速挡块进行参考位置返回。 0012/0 MIRx 各轴镜像的设定0关闭1开启 0012/4 AIC 轴命令的移动距离0依照指定的地址1总为增量命令0012/7 RMVx 各轴的受控轴拆除设定0不拆除受控轴1拆除受控轴 3216 自动加程序段号时程序段号的间隔O 1 2.RS232C口参数 0020 此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。 0,1 RS-232-C串行端口1 2 RS-232-C串行接口2 3 遥控缓冲器接口 4 存储卡接口 5 数据服务器接口10 DNC1/DNC2接口,OSI因特网12 DNC1接口#2 0021 前台输入设备的设定 0022 后台输入设备的设定 0023 后台输出设备的设定(前台与后台同时使用不同的输入输出设备时,作为后台的设备可设定的数值只有0-3。如果使用了正在使用的输入输出设备,将发生报警P/S 233或BP/S233,同时,注意设定值0和1表示相同的输入输出设备。) 100/3 NCR 程序段结束的输出码O 1 100/5 ND3 DNC运行时:读一段/读至缓冲器满O 1 3.与存储卡接口相关的参数 0300/0 PCM 存储卡接口0:NC端接口1:电脑端接口 4.与FACTOLINK相关的参数(与面板操作相关的参数) 0801/0 SB2 停止位的个数0:一位1:2位
FANUC数控系统数据备份与恢复
FANUC 使用存储卡数据备份和恢复 1.关闭系统插存储卡 2.起动引导系统方法及画面如下(BOOT SYSTEM ): 5. 操作方法:用软件UP DOWN 进行选择处理。把光标移到要选择的功能上,按软件SELECT ,英文显示请确认?之后按软件YES 或NO 进行确认。正常结束时英文显示请按SELECT 键。最终选择END 结束引导系统BOOT SYSTEM ,起动CNC ,进入主画面。 6. 软菜单:[<1][SELECT 2][YES 3][NO 4][UP 5][DOWN 6][7>]使用软键起动时,数字显示部的数字不显示。用软键或数字键进行1-7操作说明如下表:
FANUC数控系统Compact flash card (CF存储卡)的选用和详细操作步骤 默认分类2007-12-11 12:45:06 阅读210 评论0 字号:大中小订阅 1.前言:Compact flash card (CF 卡) 可以当作FANUC控制器的数据服务器储存空间。而且,当插在FANUC控制器的PCMCIA 接口上可以当作备份数据用的记忆卡(IC 卡)。 2.组成:如果使用桌上型计算机请选配CF 卡、CF转接槽及USB型式的CF卡片阅读机。如果使用笔记型计算机请选配CF 卡、CF转接槽(但要确认你的笔记型计算机是否支持PCMCIA 接口)。 CF 卡、CF转接槽USB型式的CF卡片阅读机 3.兼容的控制器: 控制器厂商控制器型式数据服务器/网络接口 发那科0i-MB 数据服务器(ATA flash 型式) 21i-MB 数据服务器(ATA flash 型式) 18i-MB 数据服务器(ATA flash 型式) 4. 规格: 4.1使用TYPE II 接口。
FANUC常用系统参数说明
FANUC0 小括号()改为中括号【】将3204中的PAF由0改为1. 释放风扇报警(ALM701参数PRM8901#0(FAN) 08000-08999保密设置NE8(N0.3202#0). 09000-09999保密设置NE9(NO.3202#4). FANUC Series 0i-MD:在显 示器上修改梯图。 按SY STEM!,按右扩展键几次,直到显示器下面出现[PMCCNF时,按[PMCCNF软键,按[设定]软键,在出现的画面上将:编程允许(EDIT ENABLE)内置xx(PROGRAERNABLE)编辑后保存到(WRITETOF-ROM (EDIT) ), 这三项打开即可修改梯图. FANUC Series 0i-MC : 按SY STEM!,按[ > ]软键几次,当出现[PMCPRM软键时按此键,按[SETING ]软键,在出现的画面上将: EDIT ENABLE! 1 WRITE TO F-ROM (EDIT置1 PROGRAMMER ENA B LE 这三项打开即可修改梯图。 这三项只要能置为 1 ,就能进入梯图修改,xx 不了1,就是有参数封
住了,防止别人乱改梯图。对于有密码的,要输入密码才可以看到, 才可以修改。为使用梯形图编辑功能,应该 在“PARAMETERSFOR ONLINE MONITO R中把“ RS-232- C和“F-BUS选择为“ NOT USE , 以使在线监控功能无效。 自动插入顺序号:0000 #5 SEQ 自动插入顺序号增量值:3216 最大主轴转速:3772 加工中心乱刀XX System——参数-----PNMNET----- 数据----- 操作----- 缩放 寻找。 xx 系统D144,主轴25, D145 1POT(1).D146(2)…… 新版本系统D300主轴25, D301 1POT(1).D302 2POT(2)……
FANUC变量对照表
表1 宏调用时所传递的字段参数名与当前宏局部变量对照表 字段名 宏变量 字段名 宏变量 字段名 宏变量 字段名 宏变量 A #1 I #4 T #20 G 不能为自变量 B #2 J #5 U #21 L C #3 K #6 V #22 N D #7 M #13 W #23 O E #8 Q #17 X #24 P F #9 R #18 Y #25 H #11 S #19 Z #26 系统变量 #FANUC Oi 系统变量一览表 1000~#1015,#1032 ——是指接口输入变量 #1100~#1115,#1132,#1133——是指输出变量 #10001~#10400,#11001!11400——是指刀具长度补偿值 #12001~#12400,#13001~#13400——是指刀具半径补偿值 #2001~#2400——是指刀具长度与半径补偿值(偏置组数能小于等于200时) #3000——是指报警 #3001,#3002——是指时钟 #3003,#3004——是指循环运行控制 #3005——是指设定数据(SETTING 值) 变量号码 用途 #1000~#1035 接口信号DI #11000~#1035 接口信号DO #2000~#2999 刀具补偿量 #3000,#3006 P/S 报警,信息 #3001,#3002 时钟 #3003,#3004 单步,连续控制 #3007 镜像 #4001~#4018 G 代码 #4107~#4120 D ,E ,F ,H ,M ,S ,T 等 #5001~#5006 各轴程序段终点位置 #5021~#5026 各轴现时位置 #5221~#5315 工件偏置量 公式
FANUC数控系统故障诊断及参数的恢复调试-最新文档
FANUC数控系统故障诊断及参数的恢复调试 某厂生产的CK6150数控车床,采用FANUC 0i-mate数控系统,开机后出现报警信息:“970 NMI OCCURRED IN PMCLSI”,机床无法启动。查阅相关资料知,该报警的含义是:PMCLSI内部发生NMI(非屏蔽中断)或RAM出现奇偶错误,故笔者初步断定数控系统出现故障,需进行诊断与维修。 1 数控系统硬件故障的诊断维修 FANUC 0i-mate数控系统采用模块化结构,母板上安装有各种功能的子卡,如轴控制卡、显示卡、CPU卡、FROM/SRAM卡及模拟主轴模块等,系统由输出电压为直流24伏的电源单元供电。由于本单位有相同类型的数控系统,故维修诊断采用替换法进行。为确保替换上的板卡不出现意外,笔者对供电模块进行了检查,经测量,该模块供电电压稳定输出在直流24 V,工作正常,可以进行板卡的替换维修工作。首先替换母板,上电后系统依然报警,无法启动,考虑到系统的显示功能工作正常,接着分别更换了轴卡及CPU卡,上电后,系统终于可以正常启动了,由此确定系统的母板(型号为:A20B-8101-0285/02A)、轴卡(型号为:A20B-3300-0393/02A)、CPU卡(型号为:A20B-3300-029/04C)已损坏,需要更换。至此,数控系统硬件故障的诊断维修工作初步完成。 2 数控系统用户参数的恢复与调试
在更换了数控系统的母板、轴卡、CPU卡后,系统虽然能正常启动,但依然出现了“935”号报警,即用来存储参数和加工程序等数据的SRAM发生了ECC错误。我们知道,在FROM/SRAM 卡里,存储有CNC系统软件及机床厂家开发的用户程序(PMC梯形图)等,开机后,系统软件和用户软件只有正常登录到DRAM 模块和伺服卡上的RAM后,数控机床才能正常工作。一般情况下,FANUC系统自带的系统软件用户是无法删除的,出现错误的应是机床厂家开发的用户软件。 造成此错误的可能原因有三个:一是锂电池没电,导致FROM/SRAM卡内的数据丢失;二是FROM/SRAM卡内的数据被破坏,如进行了上电清零操作;三是FROM/SRAM卡本身损坏。前期进行硬件维修时,已对锂电池及FROM/SRAM卡进行了检查,硬件本身无故障,故确定FROM/SRAM卡内数据已破坏或丢失,需要恢复数据后机床才能正常工作。但由于单位维修人员多次更换,无法找到机床原始参数,联系机床厂家,该单位因各种原因已处于停产状态,也无法提供原始参数。另外,在笔者维修此故障前,前一维修人员在维修时对机床进行了清零操作,而在清零前又没有及时对数据进行备份,无奈之下,笔者只能依据FANUC公司提供的维修手册及机床说明书,同时结合本机床的实际情况,对主轴参数、伺服参数等进行恢复与调试。 2.1 伺服参数及主轴参数的初始化 参数的初始化主要有伺服参数的初始化及主轴参数的初始
发那科系统变量详解
第二节变量 普通的加工程序直接数字标注G代码和移动距离,例如G55和X55.0,用定制宏指令时,可以直接用数字或使用变量。当使用变量号时可通过程序或MDI 操作改变变量值,例如: 变量的表示:当标注一个变量时在符号(#)的后面标注变量号,例如:#1表达式可以用来当变量号,但表达式必须放在括号里,例如:#[#33-2+#4]。 变量的类型: 变量的取值范围:局部变量和公共变量可以取: 0、-1047到-10-29和+10-29到+1047范围内的任意值 如果计算无结果会P/S警报器报警。 小数点的使用:在程序中给变量进行赋值时,可以省略小数点。 例如:#1=100;意义就是;变量#1的实际值是100.000。 变量的使用:在程序中要使用一个变量值,在地址语句后面标注变量号即可,当用表达式标注变量时表达式要放在括号里,例如:G02 I[#1+#18]F#9;
在1/1000mm的增量系统中被使用的变量值的小数点后面第四位会被四舍五入。例如:#1=500.123678;那么当执行G00X#1时实际的命令会被翻译成 G00X500.124; 当使用了一个没有定义的变量时,该变量会被忽略。例如#1=0;#2的是空,那么当运行G00X#1Y#2;时其结果是G00X0; 未定义的变量:当没有给变量定义值时,该变量称为“空”变量。变量#0永远是空变量。它不能写,但能读。比如: 当使用了一个没有定义的变量时,该变量会被忽略。除非用<空>代替否则<空>等于0。 当用在条件表达式时:只在EQ和NE时<空>才不等同于0
变量不能不使用的情况:程序号、顺序号、选择快的跳跃不能使用变量。 例如:O#2;/#3G00Z300.0;N#9Y1000.0;这种情况都是不可以的使用变量的。 第三节系统变量 可以用系统变量读和写CNC内部的数据,如当前的工件坐标系中的位置和刀具偏置数据。有些系统变量只能读。系统变量对编写自动化程序和通用程序十分重要。 关于界面信号的变量:
CAD系统变量参数解析(最全最详细)
CAD系统变量参数详细解析 变量名称说明 ACADLSPASDOC 0 仅将加载到AutoCAD 任务打开的第一个图形中; 1 将加载到每一个打开的图形中 ACADPREFIX 存储由ACAD 环境变量指定的目录路径(如果有的话),如果需要则附加路径分隔符 ACADVER 存储AutoCAD 的版本号。这个变量与DXF 文件标题变量$ACADVER 不同,"$ACADVER" 包含图形数据库的级别号 ACISOUTVER 控制ACISOUT 命令创建的SAT 文件的ACIS 版本。ACISOUT 支持值15 到18、20、21、30、40、50、60 和70。 AFLAGS 设置ATTDEF 位码的属性标志:0无选定的属性模式:1.不可见2.固定4.验证.8.预置ANGBASE 类型:实数;保存位置:图形初始值:相对于当前UCS 将基准角设置为0 度。ANGDIR 设置正角度的方向初始值:0;从相对于当前UCS 方向的0 角度测量角度值。0 逆时针1 顺时针 APBOX 打开或关闭AutoSnap 靶框。当捕捉对象时,靶框显示在十字光标的中心。0 不显示靶框1 显示靶框 APERTURE 以像素为单位设置靶框显示尺寸。靶框是绘图命令中使用的选择工具。初始值:10 AREA AREA 既是命令又是系统变量。存储由AREA 计算的最后一个面积值。 ATTDIA 控制INSERT 命令是否使用对话框用于属性值的输入:0.给出命令行提示1.使用对话框中国热模网首发 ATTMODE 控制属性的显示:0 关,使所有属性不可见;1.普通,保持每个属性当前的可见性; 2.开,使全部属性可见 ATTREQ 确定INSERT 命令在插入块时默认属性设置。0.所有属性均采用各自的默认值;1.使用对话框获取属性值 AUDITCTL 控制AUDIT 命令是否创建核查报告(ADT) 文件:0.禁止写ADT 文件 1.写ADT 文件 AUNITS 设置角度单位:0.十进制度数1.度/分/秒2.百分度3.弧度4.勘测单位 AUPREC 设置所有只读角度单位(显示在状态行上)和可编辑角度单位(其精度小于或等于当前AUPREC 的值)的小数位数。 AUTOSNAP 0.关(自动捕捉);1.开2.开提示4.开磁吸8.开极轴追踪16 开捕捉追踪32 开极轴追踪和捕捉追踪提示 BACKZ 以绘图单位存储当前视口后向剪裁平面到目标平面的偏移值。VIEWMODE 系统变量中的后向剪裁位打开时才有效。 BINDTYPE 控制绑定或在位编辑外部参照时外部参照名称的处理方式:0.传统的绑定方式1.类似"插入"方式 BLIPMODE 控制点标记是否可见。BLIPMODE 既是命令又是系统变量。使用SETVAR 命令访问此变量:0.关闭1.打开 CDATE 设置日历的日期和时间,不被保存。 CECOLOR 设置新对象的颜色。有效值包括BYLAYER、BYBLOCK 以及从1 到255 的整数。
FANUC维修中常用参数
FANUC维修中常用参数 FANUC系统有很丰富的机床参数,为数控机床的安装调试及日常维护带来了方便条件。根据多年的实践,对常用的机床参数在维修中的应用做一介绍。 1. 手摇脉冲发生器损坏。一台FANUC 0TD数控车床,手摇脉冲发生器出现故障,使对刀不能进行微调,需要更换或修理故障件。当时没有合适的备件,可以先将参数900#3置“0;'暂时将 手摇脉冲发生器不用,改为用点动按钮单脉冲发生器操作来进行刀具微调工作。等手摇脉冲发生器修好后再将该参数置“伫 2. 当机床开机后返回参考点时出现超行程报警。上述机床在返回参考点过程中,出现510或511超程报警,处理方法有两种: (1) 若X轴在返回参考点过程中,出现510或就是511超程报警,可将参数0700LT1X1数值改为+99999999(或将0704LT1X2数值修改为-99999999)后,再一次返回参考点。若没有问题则将参数0700或0704数值改为原来数值。 (2) 同时按P与CAN键后开机,即可消除超程报警。 3. 一台FANUC 0i数控车床,开机后不久出现ALM701报警。从维修说明书解释内容为控制部上部的风扇过热,打开机床电气柜,检查风扇电机不动作,检查风扇电源正常,可判定风扇损坏,因一时购买不到同类型风扇,即先将参数RRM8901#0改为“1先释放ALM701报警,然后在强制冷风冷却,待风扇购到后,再将PRM8901改为W 4. 一台FANUC 0M数控系统加工中心,主轴在换刀过程中,当主轴与换刀臂接触的一瞬间发生接触碰撞异响故障。分析故障原因就是因为主轴定位不准,造成主轴头与换刀臂吻合不好,无疑会引起机械撞击声,两处均有明显的撞伤痕迹。经查,换刀臂与主轴头均无机械松动,且换刀臂定位动作准确,故采用修改N6577参数值解决,即将原数据1525改为1524后,故障排除。 5. 密级型参数0900?0939维修法。按FANUC 0MC操作说明书的方法进行参数传输时,密级型参数0900?0939必须用MDI方式输入很不方便。现介绍一种可以传输包含密级型参数0900?0939在内的传输方法,步骤如下: (1) 将方式开关设定在EDIT位置; (2) 按PARAM键,选择显示参数的画面; (3) 将外部接收设备设定在STAND BY (准备)状态; (4) 先按EOB键不放开,再按OUTPOT键即将全部参数输出。 6. 一台FANUC 0MC立式加工中心,由于绝对位置编码电池失效,导致X、Y、Z丢失参考点,必须重新设置参考点。 (1) 将PWE“ 0”改为“1,'更改参数NO、76、1=1,NO、22改为,此时CRT显示“ 300>警即X、Y、Z轴必须手动返回参考点。 (2) 关机再开机,利用手轮将X、Y移至参考点位置,改变参数NO、22为,则表示X、Y已建立了参考点。 (3) 将Z轴移至参考点附近,在主轴上安装一刀柄,然后手动机械手臂,使其完全夹紧刀柄。此时将参数NO、22改为,即Z轴建立参考点。将NO76、1设“00,'PWE改为0。
FANUC常用参数说明
包括运行速度,到位宽度,加减速时间常数,软限位,运行 关的参数等,参照如下常用参数表(表2)设定。 表2常用参数说明 参数含义 FS-OI MA/MB FS-OI-Mate-MB FS-16/18/21M FS-16I/18I/21IM FS-OI TA/TB FS-OI-Mate-TB FS-16/18/21T FS-16I/18I/21IT PM-O 备注 (一般设定值) 程序输出格式为 ISO 代码 数据传输波特率 103,113 I/O 通道 20 20 用存储卡 DNC 138#7 0000#1 0000#1 1 103,113 10 0为 232口,4为存储卡 138 1 可选 DNC 文件 直线轴 /旋转轴 1006#0 1006#0 旋转轴为 1 半径编程 /直径编程 1006#3 车床的 X 轴 参考点返回方向 1006#5 1006#5 0: +, 1: - 轴名称 1020 1020 88(X) , 89(Y) , 90(Z) , 65(A) , 66(B) , 67(C) 轴属性 1022 1022 1,2,3 轴连接顺序 1023 1023 1,2,3 存储行程限位正极限 1320 1320 调试为 99999999 存储行程限位负极限 1321 1321 调试为 -99999999 未回零执行自动运行 1005#0 1005#0 调试时为 1 未回零执行手动快速 1401#0 1401#0 调试为 1 空运行速度 1410 1410 1000 左右 各轴快移速度 1420 1420 8000 左右 最大切削进给速度 1422 1422 8000 左右 各轴手动速度 1423 1423 4000 左右 各轴手动快移速度 1424 1424 可为 0,同 1420 各轴返回参考点 FL 速度 1425 1425 300-400 快移时间常数 1620 1620 50-200 切削时间常数 1622 1622 50-200 JOG 时间常数 1624 1624 50-200 1815#1 1815#1 全闭环 1 /停止时的位置偏差,和显示有 电机绝对编码器 1815#5 1815#5 伺服带电池 1 各轴位置环增益 1825 1825 3000 各轴到位宽度 1826 1826 20-100 分离型位置检测器
FANUC常用系统参数说明
FANUC0 小括号()改为中括号【】将3204中的PAR由0改为1. 释放风扇报警(ALM701)参数PRM8901#0(FAN) O8000-O8999保密设置NE8(NO.3202#0). O9000-O9999保密设置NE9(NO.3202#4). FANUC Series Oi-MD: 在显示器上修改梯图。 按SYSTEM键,按右扩展键几次,直到显示器下面出现[PMCCNF]时,按[PMCCNF]软键,按[设定]软键,在出现的画面上将:编程允许(EDIT ENABLE),内置编程器许可(PROGRA MM ER ENABLE),编辑后保存到快闪存储器(WRITE TO F-ROM (EDIT)), 这三项打开即可修改梯图. FANUC Series Oi-MC : 按SYSTEM 键,按[ > ] 软键几次,当出现[PMCPRM]软键时按此键,按[SETING]软键,在出现的画面上将:EDIT ENABLE置1 WRITE TO F-ROM (EDIT)置1 PROGRAMMER ENABLE 置1 这三项打开即可修改梯图。
这三项只要能置为1 ,就能进入梯图修改,若置不了1,就是有参数封住了,防止别人乱改梯图。对于有密码的梯形图,要输入密码才可以看到,才可以修改。为使用梯形图编辑功能,应该在“PARAMETERS FOR ONLINE MONITOR”中把“RS-232-C”和“F-BUS”选择为“NOT USE”,以使在线监控功能无效。 自动插入顺序号:0000 #5 SEQ 自动插入顺序号增量值:3216 最大主轴转速:3772 加工中心乱刀修正 System------参数-----PNMNET-----数据-----操作-----缩放-----寻找。 旧版本系统D144,主轴25,D145 1POT(1).D146(2)……新版本系统D300主轴25,D301 1POT(1).D302 2POT(2)……
FANUC系统宏程式详解
宏程序的简单调用格式: 格式: G65 P 程序序号 L 重复次数变量分配 变量对照表 控制命令 1. If [ 条件表达式 ] GOTO n 2. While [ 条件表达式 ] DO m End m 运算符号相等:EQ 不等于: NE 大于:GT 小于:LT 大于等于: GE 小于等于: LE
FANUC系统宏程式 FANUC系统宏程序编程 一变量 普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0 。使用用户宏程序时,数值可以直接指定或 用变量指定。当用变量时,变量值可用程序或用MDI 面板上的操作改变。 #1=#2+100 G01 X#1 F300 说明: 变量的表示计算机允许使用变量名,用户宏程序不行。变量用变量符号(例如:#1 表达式可以用于指定变量号。此时,表达式必须封闭在括号中例如: #[#1+#2-12] 变量的类型变量根据变量号可以分成四种类型变量号变量类型功能 #0空变量该变量总是空, 没有值能赋给该变量. #1-#33局部变量 局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时, 局部变量被初始化为空. 调用宏程序时, 自变量对局部变量赋值, #100-#199 #500-#999公共变量公共变量在不同的宏程序中的意义相同.当断电时,变量#100-#199 初始化为空. 变量#500-#999 的数据保存, 即使断电也不丢失. #1000系统变量 系统变量用于读和写CNC运行时各种数据的变化,例如, 刀具的当前位置和补偿值. 变量值的范围 局部变量和公共变量可以有0 值或下面范围中的值: -1047 到-10-29 或-10-2 到-1047 如果计算结果超出有效范围,则发出 P/S 报警NO.111. 小数点的省略 当在程序中定义变量值时,小数点可以省略。 例:当定义#1=123 ;变量#1 的实际值是123.000 。 变量的引用为在程序中使用变量值,指定后跟变量号的地址。当用表达式指定变量时,要把表达式放在括号中。例如: G01X[#1+#2]F#3; 被引用变量的值根据地址的最小设定单位自动地舍入。 例如: 当G00X#/; 以1/1000mm 的单位执行时,CNC把123456 赋值给变量#1, 实际指令值为G00X12346. 改变引用变量的值的符号,要把负号(-)放在#的前面。 例如:G00X-#1 当引用未定义的变量时,变量及地址都被忽略。 #)和后面的变量号指定
FANUC 常用参数及分类
FANUC 常用参数及分类 参数在NC系统中用设定NC数控机床及辅助设备的规格和内容,及加工操作所必需的一些数据。机床厂家在制造机床、最终用户在使用过程中,通过参数的设定,来实现对伺服驱动、加工条件、机床坐标、操作功能、数据传输等方面的设定和调用。 机床厂商、用户在配备、使用FANUC系统时,根据具体的使用状况,有大量的参数需要调整和设置。在使用和调整这些参数是有必要搞清楚这些参数的用途和设置方法。在下文中介绍一些有关FANUC系统参数的常识和一些常用参数。 表3-2FANUC系统参数类型列表 数据形式 位型0或1 位轴型 字节型-128`127 0~256 有些参数中不使用符号 字节轴型 字型-32768~3276 0~65535 有些参数中不使用符号 字轴型 双字型-99999999~99999999 双字轴型 FANUC系统参数分类 按照数据形式参数可以分为下表所表示的类别: 1、对于位型和位轴型参数,每个数据号由8位组成,每一位有不同的意义。 2、轴型参数允许参数分别设定给每个控制轴。 3、每个数据类型有一个通用的有效范围,参数不同其数据范围也不同。 为了进一步说明这两类数据在数据设定方面的区别,特举如下两个例子:1、位型和位轴型参数举例 1000 # 7 # 6 # 5 # 4 #3 #2 #1 #0 数据号S E Q INI ISO TV C 数据 内容 通过该例可以知道位型和位轴型的数据格式,它们都是每一个数据号由0~7位数据组成。在描述这一类数据时可以用这样的格式来说明:数据号.位号。比如上例中的ISO参数就可以用这样的符号来表示:1000.1。1000.1=0时表示数据采用EIA码输出,1000.1=1时表示数据输出采用ISO码。位型和位轴型数据就是用这样的方式来设定不同的系统功能。 2、位型和位轴型以外的数据 1023 指定轴的伺服轴号 数据号数据内容
FANUC系统宏程式详解
宏程序的简单调用格式: 格式:G65 P程序序号 L重复次数变量分配 变量对照表 A #1 I #4 T #20 B #2 J #5 U #21 C #3 K #6 V #22 D #7 M #13 W #23 E #8 Q #17 X #24 F #9 R #18 Y #25 H #10 S #19 Z #26 控制命令 1.If [条件表达式] GOTO n 2.While [条件表达式] DO m End m 运算符号 相等:EQ 不等于: NE 大于:GT 小于:LT 大于等于:GE 小于等于:LE
FANUC系统宏程式 FANUC系统宏程序编程 一变量 普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0。使用用户宏程序时,数值可以直接指定或用变量指定。当用变量时,变量值可用程序或用MDI面板上的操作改变。 #1=#2+100 G01 X#1 F300 说明: 变量的表示 计算机允许使用变量名,用户宏程序不行。变量用变量符号(#)和后面的变量号指定。 例如:#1 表达式可以用于指定变量号。此时,表达式必须封闭在括号中。 例如:#[#1+#2-12] 变量的类型 变量根据变量号可以分成四种类型 变量号变量类型功能 #0 空变量该变量总是空,没有值能赋给该变量. #1-#33 局部变量局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时,局部变量被初 始化为空.调用宏程序时,自变量对局部变量赋值, #100-#199 #500-#999 公共变量公共变量在不同的宏程序中的意义相同.当断电时,变量#100-#199初始化为空. 变量#500-#999的数据保存,即使断电也不丢失. #1000 系统变量系统变量用于读和写CNC运行时各种数据的变化,例如,刀具的当前位置和补偿 值. 变量值的范围 局部变量和公共变量可以有0值或下面范围中的值: -1047到-10-29或-10-2到-1047 如果计算结果超出有效范围,则发出P/S报警NO.111. 小数点的省略 当在程序中定义变量值时,小数点可以省略。 例:当定义#1=123;变量#1的实际值是123.000。 变量的引用 为在程序中使用变量值,指定后跟变量号的地址。当用表达式指定变量时,要把表达式放在括号中。 例如:G01X[#1+#2]F#3; 被引用变量的值根据地址的最小设定单位自动地舍入。 例如: 当G00X#/;以1/1000mm的单位执行时,CNC把123456赋值给变量#1,实际指令值为G00X12346. 改变引用变量的值的符号,要把负号(-)放在#的前面。 例如:G00X-#1 当引用未定义的变量时,变量及地址都被忽略。 例如:当变量#1的值是0,并且变量#2的值是空时,G00X#1 Y#2的执行结果为G00X0。 双轨迹(双轨迹控制)的公共变量
FANUC-18i参数一览表(精)
FANUC-18i调试参数一览表 作者:流水似剑 2008-04-23 04:51:35 标签:教育 FANUC-18i调试参数一览表 调试参数一览表: 一、SV设定 SV设定(未接光栅) SV设定(接上光栅) X Y Z B X Y Z B 初始设定位 1010 1010 1010 1010 1010 1010 1010 1010 电机号 303 303 303 293 303 303 303 293 AMR 0 0 0 0 0 0 0 0 CMR 2 2 2 2 2 2 2 105 FEEDGEAR 1 1 1 3 1 1 1 1 N/M 200 100 100 2000 1 1 100 2 移动方向 111 -111 -111 -111 111 -111 -111 -111 速度环脉冲数 8192 8192 8192 8192 8192 8192 8192 8192 位置环脉冲数 12500 12500 12500 12500 5000 10000 12500 1500 参考计数器 5000 10000 10000 10000 50000 50000 10000 6000 注:光栅生效NO.1815.1=1 FSSB开放相应接口。 二、进给轴控制相关参数 1423 手动速度 1424 手动快进 1420 G00快速
1620 加减速时间 1320 软件限位 1326 三、回零相关参数 NO.1620 快进减速时间300ms NO.1420 快进速度 10m NO.1425 回零慢速 NO.1428 接近挡铁的速度 NO.1850 零点偏置 四、SP调整参数 NO.3701.1=1 屏蔽主轴 NO.4020 电机最大转速 NO.3741 主轴低档转速(最高转速) NO.3742 主轴高档转速(最高转速) NO.4019.7=1 自动设定SP参数(即主轴引导) NO.4133 主电机代码 NO.3111.6=1 显示主轴速度 NO.3111.5=1 显示负载监视器 NO.4001.4 主轴定位电压极性(定位时主轴转向) NO.3705.1=1 SOR用于换档 NO.3732=50 换档速度 NO.4076=33 定位速度
FANUC系统进入系统参数修改的步骤
FANUC系统进入系统参数修改的步骤 黑龙江省水利学校张立忠2018年06月19日 写在前面 有缘的百度朋友们,为着共同爱好的同行们,大家好!这个FANUC系统简单的系统参数修改步骤虽然简单,但是对于很多的初学者,特别是自学的初学者,要是进行熟练的操作也需要费很多周折,因为本人经历过,可能个人比较笨。为了有同感的朋友们使用方便,特将详细的操作步骤整理出来,供需要者参考使用。 数控机床有两个操作面板。一个是系统操作面板,一个是机床操作面板。(如下图) 左面部分就是系统操作面板,它是系统生产厂家生产系统时设计制作的。它是系统整体的一部分。使用系统操作面板可以进行程序的编制、参数的修改、梯形图的编辑等操作。 右面部分是机床操作面板部分。它是机床生产厂家根据机床的使用功能以及机床所使用的数控系统功能设计的,它有对数控系统操作的选择功能键(如MDI键,当修改系统参数时需要选择此键),有对机床部件的操作功能(如水泵的开关,刀架刀号位置的选择等等)。 FANUC数控系统有多种参数,如系统参数、K参数、D参数等等。如果要修改系统参数,就必须要打开系统参数修改开关。虽然这是一个简单的操作,但是对于新手来说有时候也不是很轻易的就能进入的。所以,在这里把这一操作详细的写出来,希望能帮助到需要的朋友们。 进入参数修改开关第一步,选择机床操作面板上的MDI键,使MDI指示灯点亮(如下图)。 第二步,选择系统操作面板上的OFS/SET键,系统显示器上出现如下画面。
按右下角箭头软键数次,出现如下画面,如下图。 然后,按[设定]下方正对应的软键,就会出现参数修改开关界面,如下图。
按系统操作面板上的数字键“1”,再按系统造作面板上的INPUT键(如下图), 就会出现如下画面(如图),参数写入变成1了,这是修改系统参数的必须条件。 接着在报警选项下会出现100号报警(如下图),经过这些步骤,就可以对FANUC系统的 系统参数进行修改了。
发那科系统变量详解
` 第二节变量 普通的加工程序直接数字标注G代码和移动距离,例如G55和X55.0,用定制宏指令时,可以直接用数字或使用变量。当使用变量号时可通过程序或MDI操作改变变量值,例如: #33=#1+10.5 G01 X#1 F500 变量的表示:当标注一个变量时在符号(#)的后面标注变量号,例如:#1表达式可以用来当变量号,但表达式必须放在括号里,例如:#[#33-2+#4]。变量的类型:
变量的取值围:局部变量和公共变量可以取: 47-29-2947范围内的任意值0、-10和+10到-10到+10 如果计算无结果会P/S警报器报警。 小数点的使用:在程序中给变量进行赋值时,可以省略小数点。例如:#1=100;意义就是;变量#1的实际值是100.000。
变量的使用:在程序中要使用一个变量值,在地址语句后面标注变量号即可,当用表达式标注变量时表达式要放在括号里,例如:G02 I[#1+#18]F#9; 文档Word ` 在1/1000mm的增量系统中被使用的变量值的小数点后面第四位会被四舍五入。例如:#1=500.123678;那么当执行G00X#1时实际的命令会被翻译成 G00X500.124; 当使用了一个没有定义的变量时,该变量会被忽略。例如#1=0;#2的是空,那么当运行G00X#1Y#2;时其结果是G00X0; 未定义的变量:当没有给变量定义值时,该变量称为“空”变量。变量#0永远是空变量。它不能写,但能读。比如: 当使用了一个没有定义的变量时,该变量会被忽略。除非用<空>代替否则 <空>等于0。
当用在条件表达式时:只在EQ和NE时<空>才不等同于0 当#1=<空>时当#1=0时
fanuc数控系统常用参数表
fanuc数控系统参数表 2010-07-16 14:01 FANUC系统有很丰富的机床参数,为数控机床的安装调试及日常维护带来了方便条件。根据多年的实践,对常用的机床参数在维修中的应用做一介绍。 1.手摇脉冲发生器损坏。一台FANUC 0TD数控车床,手摇脉冲发生器出现故障,使对刀不能进行微调,需要更换或修理故障件。当时没有合适的备件,可以先将参数900#3置“0”,暂时将手摇脉冲发生器不用,改为用点动按钮单脉冲发生器操作来进行刀具微调工作。等手摇脉冲发生器修好后再将该参数置“1”。 2.当机床开机后返回参考点时出现超行程报警。上述机床在返回参考点过程中,出现510或511超程报警,处理方法有两种:(1)若X轴在返回参考点过程中,出现510或是511超程报警,可将参数0700LT1X1数值改为+99999999(或将0704LT1X2数值修改为-99999999)后,再一次返回参考点。若没有问题,则将参数0700或0704数值改为原来数值。 (2)同时按P和CAN键后开机,即可消除超程报警。 3.一台FANUC 0i数控车床,开机后不久出现ALM701报警。从维修说明书解释内容为控制部上部的风扇过热,打开机床电气柜,检查风扇电机不动作,检查风扇电源正常,可判定风扇损坏,因一时购买不到
同类型风扇,即先将参数RRM8901#0改为“1”先释放ALM701报警,然后在强制冷风冷却,待风扇购到后,再将PRM8901改为“0”。 4.一台FANUC 0M数控系统加工中心,主轴在换刀过程中,当主轴与换刀臂接触的一瞬间,发生接触碰撞异响故障。分析故障原因是因为主轴定位不准,造成主轴头与换刀臂吻合不好,无疑会引起机械撞击声,两处均有明显的撞伤痕迹。经查,换刀臂与主轴头均无机械松动,且换刀臂定位动作准确,故采用修改N6577参数值解决,即将原数据1525改为1524后,故障排除。 5.密级型参数0900~0939维修法。按FANUC 0MC操作说明书的方法进行参数传输时,密级型参数0900~0939必须用MDI方式输入很不方便。现介绍一种可以传输包含密级型参数0900~0939在内的传输方法,步骤如下: (1)将方式开关设定在EDIT位置; (2)按PARAM键,选择显示参数的画面; (3)将外部接收设备设定在STAND BY(准备)状态; (4)先按EOB键不放开,再按OUTPOT键即将全部参数输出。 6.一台FANUC 0MC立式加工中心,由于绝对位置编码电池失效,导致X、Y、Z丢失参考点,必须重新设置参考点。
发那科参数大全
发那科系统参数总表[1] 系统参数不正确也会使系统报警。另外,工作中常常遇到工作台不能回到零点、位置显 示值不对或就是用MDI键盘不能输入刀偏量等数值,这些故障往往与参数值有关,因此维修时若确认PMC 信号或连线无误,应检查有关参数。 一.16系统类参数 0:OFF 1:ON 1。 SETTING参数(与设定相关得参数) 参数号符号意义16-T 16—M 0000/0 TVC 代码竖向校验O:不进行 1:进行 0000/1 ISO EIA/ISO代码 O:EIA代码 1:ISO代码 0000/2 INI MDI方式公/英制 O:米制 1:英制 0000/5 SEQ 自动加顺序号O:不进行 1:进行 0002/0RDG 远程诊断O不进行1进行 0002/7 SJZ 手动参考位置返回0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。 1只用减速挡块进行参考位置返回。 0012/0 MIRx 各轴镜像得设定 0关闭 1开启 0012/4 AIC 轴命令得移动距离 0依照指定得地址 1总为增量命令 0012/7 RMVx 各轴得受控轴拆除设定 0不拆除受控轴 1拆除受控轴 3216 自动加程序段号时程序段号得间隔 O 1 2.RS232C口参数 0020 此参数用于设定与连接在哪个接口上得输入输出设备之间进行数据得输入输出。0,1 RS-232—C串行端口1 2 RS-232—C串行接口2 3 遥控缓冲器接口4存储卡接口5数据服务器接口 10 DNC1/DNC2接口,OSI因特网 12 DNC1接口#2 0021 前台输入设备得设定 0022 后台输入设备得设定 0023 后台输出设备得设定(前台与后台同时使用不同得输入输出设备时,作为后台得设备可设定得数值只有0—3、如果使用了正在使用得输入输出设备,将发生报警P/S233或BP/S233,同时,注意设定值0与1表示相同得输入输出设备。) 100/3 NCR 程序段结束得输出码 O 1 100/5 ND3 DNC运行时:读一段/读至缓冲器满 O 1 3、与存储卡接口相关得参数 0300/0 PCM 存储卡接口 0:NC端接口 1:电脑端接口 4.与FACTOLINK相关得参数(与面板操作相关得参数) 0801/0 SB2停止位得个数0:一位 1:2位