《电机与控制应用》 电机电磁设计与三维CAD软件间的接口开发
电机设计方法
第2章电磁场有限元分析简介 电磁场的边值问题实际上是求解给定边界条件下的麦克斯韦(Maxwell)方程组及由方程组深化出的其他偏微分方程问题。从求解问题的技术手段上来说,它可以分为解析求解和数值求解两大类。对于简单模型,有时可以得到方程的解析解。若模型复杂度增加,则往往很难获得模型的解析解。随着计算工具,特别是高速大容量电子计算机的发展,电磁场数值分析已深入到工业生产各个领域,解决问题的面越来越广,分析的问题也日趋复杂。电磁场数值分析是一门综合性的学科,涉及电磁场理论、数值分析、计算方法、计算机基础知识及高级语言等多个方面,但在计算上存在着共性。有限元法是一种常用的数值方法,并有相应的电磁软件问世,其中ANSOFT公司的Maxwell 3D/2D就是非常优秀的电磁分析软件。 本章将对电磁场的基本理论、电磁场有限元的求解及ANSOFT公司的Maxwell 3D/2D 作简单的介绍。至于完整的电磁理论描述,读者可以参考许多教科书。如果读者已熟悉电磁理论,完全可以略过本章,直接从第2章开始学习如何使用Maxwell电磁软件。 1.1电磁场基本理论 1.1.1麦克斯韦方程组 在19世纪中叶,麦克斯韦在总结前人工作的基础上,提出了适用于所有宏观电磁现象的数学模型,称之为麦克期韦方程组。它是电磁场理论的基础,也是工程电磁场数值分析的出发点。 麦克斯韦方程组包括微分和积分两种形式,在此仅给出它们的微分形式,通过它们可以导出能用有限元处理电磁问题的微分方程。 麦克斯韦方程组为 法拉第电磁感应定律 麦克斯韦-安培定律 高斯电通定律 高斯磁通定律 电荷守恒定律
式中,E为电场强度,V/m;D为电通量密度,C/m;H为磁场强度,A/m;B为磁通量密度,T;J为电流密度,A/㎡;P为电荷密度C/m3。 上面5个方程中包含两个旋度方程式(1.1)、式(1.2)和3个散度方程式(1.3)、式(1.4)和式(1.5)。
直线电机电梯设计
小型载货电梯直线电机设计 黑龙江省松花江林业管理局锅炉压力容器检验所刘琪芸摘要:为满足人们生活、生产需要,电梯已成为多层建筑中不可缺少的运输工具。本文所研究的直线电机适用于小型载货电梯,在节省空间和控制噪音方面有很大的优势。 关键词载货电梯直线电机 1.直线电机的发展 直线电机也称线性电机,相比于曳引与强制驱动电梯先将电能转回为转动的机械能后利用曳引轮和曳引绳或卷筒与钢丝绳产生的摩擦力驱动电梯,直线电机驱动电梯利用直线电机可以直接将电能转化为直线运动的机械能,无需中间转换机构的传动装置。这样既可以减少如异物掉入曳引轮引发跳绳,曳引绳老化等风险,还省去机房,对重所占用的空间。而且由于传统电梯运动方向受钢丝绳控制只能沿垂直方向运动,直线电机驱动电梯更有噪声小,可水平运动灵活选择层站,同一井道可存在多部电梯等优势。 早在十九世纪至二十世纪初期,直线电机就经历了一个从想法到实验再到实验性应用的坎坷历程。一些发达国家研究人员在实验的基础上,试图将直线电机应用于导弹发射装置,电磁运动装置等。但由于当时社会生产水平牵制,直线电动机电气控制系统成本高;相对于传统旋转电机,直线电机电磁缝隙与极距比值过大导致激磁电流较大,由于铁芯两端断开,存在其特有结构导致的边缘效应。这些弊端都一度使人们对直线电机的发展应用失去信心。 二十世纪中期以来,随着控制技术提高,直线电机又被应用于如磁头定位驱动装置、空气压缩机、传送装置等。后期各国有出现了许多直线电机产品,如吊车、传送车、电动门、窗帘机、车辆运输系统等。同时线性电机不断发展,广泛应用于扫描式记录设备,自动绘图设备等新的领域。 近年来,微型直线电机,利用当代微型计算机和自动控制体系控制微型直线电机,具有反应灵敏、体积小、结构简单等特点。在直线电机基础上研制的超导直线电机,微步距直线电机,直线当量电机等。更有日本研制的压电驱动式直线电机及超声波直线电机等先进水平直线电机相继问世。 我国自二十世纪七十年代开始在直线电机应用也取得了可喜的成绩,例如直线电机冲床、窗帘机,直线电机驱动的自动门,西南交大的磁悬浮列车;但和国外相比应用推广还存在很大差距,例如德国研制的超导吸浮型磁悬浮列车和日本研制的超导斥浮型磁悬浮列车。 2 直线电机的结构与性能 直线电机是将传统的旋转型电机定转子沿轴向剖开拉直,就形成了平板式直线电机结构,再将初级次级卷绕在一根与磁场运动方向平行的轴上,结构演变过程如下图1所示: 图1 2.1直线电机的基础分类
刘亚敏1520310052--电机现代设计方法与优化作业
电机现代设计方法与优化作业 电气工程刘亚敏 1520310052 1、所用算法的寻优策略 本篇论文所采用的算法为蚁群算法,又称蚂蚁算法,其定义为:各个蚂蚁在没有事先告诉他们食物在什么地方的前提下开始寻找食物。当一只找到食物以后,它会向环境释放一种挥发性分泌物pheromone (信息素,该物质随着时间的推移会逐渐挥发消失,信息素浓度的大小表征路径的远近)来实现的,吸引其他的蚂蚁过来,这样越来越多的蚂蚁会找到食物。有些蚂蚁并没有像其它蚂蚁一样总重复同样的路,他们会另辟蹊径,如果另开辟的道路比原来的其他道路更短,那么,渐渐地,更多的蚂蚁被吸引到这条较短的路上来。最后,经过一段时间运行,可能会出现一条最短的路径被大多数蚂蚁重复着。 蚁群算法是一种新型的模拟进化算法,该算法通过模拟蚂蚁觅食的方式,使一定数量的蚂蚁在解空间内进行随机搜索,对路径上蚂蚁释放的信息素进行更新,按照转移概率决定前进的方向,最后收敛于全局最优解。蚁群算法具有较强的鲁棒性。相对于其它算法,蚁群算法对初始路线要求不高,即蚁群算法的求解结果不依赖子初始路线的选择,而且在搜索过程中不需要进行人工的调整。其次,蚁群算法的参数数目少,设置简单,易于蚁群算法应用到其它组合优化问题的求解。现在蚁群算法己经在电力网络优化、网络路中分配、函数优化和集成电路布线等领域得到应用。本文将蚁群算法进行了改进,将其用于永磁同步电机的优化设计中。
2、论文对算法的改进 算法与其它智能优化算法相比,存在搜索时间长的缺陷,该算法的复杂度可以反映这一点;而且该算法容易出现停滞现象,即搜索到一定程度后,所有个体发现的解完全一致,不能对解空间进行进一步的搜索,不利于发现更好的解。本文借鉴蚁群算法的进化思想,针对以上提及的两个问题,将算法的数学模型做了三方面的改进。 2.1转移规则的改进 对每只蚂蚁i ,定义其函数值为相应的目标函数值Zi ,并记蚂蚁i 与蚂蚁j 的目标函数值的差值为 蚂蚁j 到蚂蚁i 的转移概率为 式中:———蚂蚁j 邻域内的信息素数量; α和β———算法的权重因子,本文取α=β =1。 2.2信息素更新规则的改进 由于信息素强度Q 是表征蚂蚁所经轨迹数量的一个常数,它影响算法的全局收敛速度[ 5]。蚂蚁之间通过信息素进行交流,因此, 本文针对蚁群算法寻优过程易陷入局部最小的弊端,提出根据算法搜索的情况,动态修改需要增加的信息素的方法。即用时变函数Q(t)
直线电机资料20110302
直线电机基础 编辑本段直线电机也称线性电机,线性马达,直线马达 在实际工业应用中的稳定增长,证明直线电机可以放心的使用。下面简单介绍直线电机类型和他们与旋转电机的不同. 最常用的直线电机类型是平板式和U 型槽式,和管式。线圈的典型组成是三相,有霍尔元件实现无刷换相.图示直线电机用HALL换相的相序和相电流. 该图直线电机明确显示动子(forcer, rotor)的内部绕组.磁鉄和磁轨.动子是用环氧材料把线圈压成的。而且,磁轨是把磁铁固定在钢上。 直线电机在过去的10年,经实践上引人注目的增长和工业应用的显著受益才真正成熟。 直线电机经常简单描述为旋转电机被展平,而工作原理相同。动子(forcer, rotor) 是用环氧材料把线圈压缩在一起制成的.而且,磁轨是把磁铁(通常是高能量的稀土磁铁)固定在钢上.电机的动子包括线圈绕组,霍尔元件电路板,电热调节器(温度传感器监控温度)和电子接口。在旋转电机中,动子和定子需要旋转轴承支撑动子以保证相对运动部分的气隙(air gap)。同样的,直线电机需要直线导轨来保持动子在磁轨产生的磁场中的位置。和旋转伺服电机的编码器安装在轴上反馈位置一样,直线电机需要反馈直线位置的反馈装置--直线编码器,它可以直接测量负载的位置从而提高负载的位置精度。 直线电机的控制和旋转电机一样。象无刷旋转电机,动子和定子无机械连接(无刷),不象旋转电机的方面,动子旋转和定子位置保持固定,直线电机系统可以是磁轨动或推力线圈动(大部分定位系统应用是磁轨固定,推力线圈动)。用推力线圈运动的电机,推力线圈的重量和负载比很小。然而,需要高柔性线缆及其管理系统。用磁轨运动的电机,不仅要承受负载,还要承受磁轨质量,但无需线缆管理系统。 相似的机电原理用在直线和旋转电机上。相同的电磁力在旋转电机上产生力矩在直线电机产生直线推力作用。因此,直线电机使用和旋转电机相同的控制和可编程配置。直线电机的形状可以是平板式和U 型槽式,和管式.哪种构造最适合要看实际应用的规格要求和工作环境。 编辑本段圆柱形动磁体直线电机 圆柱形动磁体直线电机动子是圆柱形结构。沿固定着磁场的圆柱体运动。这种电机是最初发现的商业应用但是不能使用于要求节省空间的平板式和U 型槽式直线电机的场合。圆柱形动磁体直线电机的磁路与动磁执行器相似。区别在于线圈可以复制以增加行程。典型的线圈绕组是三相组成
玩具设计中马达的选用技巧和方法
玩具设计中马达的选用技巧和方法(总2页) -CAL-FENGHAI.-(YICAI)-Company One1 -CAL-本页仅作为文档封面,使用请直接删除
玩具设计中马达的选用技巧和方法 马达是玩具能够保持持续动力的主要动力源。设计人员在玩具生产中很少有机会设计一个马达,主要是选用。玩具马达的选用也有很多技巧和方法。 在玩具制造中常用的马达(电机),有万宝制(Mabuchi)、标准(Standard)等,这些马达生产厂家的产品都有马达性能的参照表,设计人员很少有机会设计一个马达,主要是选用,当然也可能因为某种原因而专门设计一个马达(很多马达厂的工程师都是从Mabuchi出来的,所以Mabuchi的标准基本可以用作玩具业的马达标准)。 用试验找出合适的转速比和扭矩 马达厂的标准是空载的转速,而转速比计算时,一般就是用空载转速的计算。行走类玩具的转速比在80~150之间,因玩具产品并非是一种精密的机械,所以可以通过调节齿轮的传动来得出实际需要的传动比。比如:齿轮传动中某一节的齿数比为20:8,实验发现转速太慢则可以试一下22:6,如果转速太快,又可以换18:10,这种办法非常方便。 马达产品都有一个最大载荷的数据,还有一个载荷与转速的关系。因为玩具产品一般不会很大而且是用电池驱动的较多,所以马达的载荷也不会很大。一般来说,载荷与扭矩越大,马达的体积也越大,所要的电池也越多,而且玩具的重量也越重,所以尽量选用合适的马达。一般保险起见,载荷与转速在曲线上升区的马达就管用。如果要节约成本,在找到一个大功率马达就可以起作用的情况下,换一个小功率的试一下。通过反复试验,找到一个功率较小又能满足要求的马达。 用收音机做干扰测试 马达的工作原理是不断地通过电刷来改变线圈中的电流,从而保证连续的转动。可以想像,马达里的磁铁越大,线圈越长,则扭矩会越大,而这种电流的改变会形成一个电磁波。电磁波的存在会对很多种家用电器造成干扰。如果一个小孩在等飞机的时候玩带有这种马达的玩具,还有可能影响飞机的起降。所以在实际工作中会增加一个抗干扰的垫圈(如DV WASHER , 0.5港币左右),但一般设计时都会在马达的两个电极上并联上一个陶瓷片电容或一个电阻(稳定电路的作用),一方面减少电刷与线圈转换时产生的电流影响,另一方面起稳定作用。实际工作中,用一个小收音机来做干扰测试器材,如不影响所有波段的电台就基本可以了。 马达转动轴一般是铁轴,而铁轴一般直接紧配一个6齿或8齿的0.5模数的齿轮(或一个小带轮或锅杆),当是齿轮或锅杆时,特别是锅杆时,会因为刚起动的瞬间,齿与齿之间会卡位,这时线圈中的电流会加大,而导致铁轴串动,串动就会解卡,所以在固定马达时千万不要把轴在轴的方向上固定死(致少要有0.5mm的余量)。
直线电机安装
直线电机的安装目录: 一、直线电机的安装设计 1.1直线电机结构设计,强度与刚度 1.2 直线电机走线 1.3 Z 轴(垂直轴)刹车 1.4 防撞设计 1.5 直线电机防护设 二、安装工艺 2.1 直线电机安装尺寸和公差 2.2 直线电机装配方法 2.3 装配其它注意事项 2.4 光栅尺安装位置及安装座要求 2.5 光栅尺安装精度要求 2.6 光栅尺的防护 2.7 冷却系统
一、直线电机的安装设计 1.1直线电机结构设计,强度与刚度 直线电机、磁板的安装位置,应当尽量设计靠近运动结构的重心位置,以平衡运动时的推力。 直线电机与磁板之间持续存在较大的磁吸力,工作台、鞍座等设计时,必须考虑有足够的强度和刚度。同时,为避免移动部件过于笨重,应尽量考虑采用高强度的材质,以及多筋板结构。其它结构上提高刚度的办法有: 1上拱结构 2导轨等支撑点尽量靠近直线电机线圈 3机床的固定部分刚性尽可能高、移动部分的重量尽可能轻,因为直线电机对刚性和移动部分重量比旋转电机更敏感 1.2 直线电机走线 直线电机相对于旋转伺服电机的系统而言,由于其推进动力在移动部件上,所以走线较旋转伺服电机复杂,许多线缆都需要通过拖链来连接。 主要需要通过拖链的线缆有:线圈的动力线、线圈的冷却管路、光栅尺读数头的数据线(如果读数头设计在移动部件上)、导轨润滑油管路。这些走线均需要通过拖链连接,请务必在设计时详尽考虑。 1.3 Z 轴(垂直轴)刹车 直线电机应用在 Z轴(垂直轴)上时,由于重力的作用,在未通电时,或直线电机无力矩输出时,会发生掉落事故。必须设计 Z轴的刹车装置。为增加安全性,建议设计Z轴平衡装置(如机械配重、氮气平衡缸等)。 1.4 防撞设计
三相电机设计
第一章绪论 中型三相异步电动机在机械制造、矿山、冶金、电力等行业,作为各设备的拖动工具应用的非常广泛,生产高压电机的企业也相当的多,产量也较大。异步电动机消耗的能源所占电力的比例最高。本文以一个机座号的一个极数简要地介绍在设计异步电动机的四个计算步骤,磁路计算、参数计算、损耗和运行性能的计算、起动性能计算。在这四个计算中,电磁感应定律贯穿整个全过程。 在中型高压电机的电磁设计过程中,现在的企业大多采用的电磁计算的核算程序,通过计算机进行计算,对于数据调整实际采用试探法。这就要求电机设计人员要对电机设计四个步骤的计算内容有很好的理论理解,要清楚参数之间的相互关系,以便在电磁计算过程中对于性能不合适的地方确定调整方向。 电机的电磁程序虽然各企业的编制都不一样,在大致的所使用方法还是基本相同,就计算机应用的电磁程序编制过程中经常用到的一些常用方法和一些原始的计算公式,尤其电机需迭代的四个参数饱和系数K T、电势系数K E、效率 、起动电流倍数 I st 在整个电磁计算过程中形成四个循环,但又互相影响,它们初值取的好坏以及控制的计算精度直接影响着计算的速度和计算的准确度。 三相异步电动机的设计中,在磁密取值即不能不饱和又不能过饱和,定转子电密高低直接影响着电机的温升、效率、电机使用铜铝材料等。电机在保证性能参数的方案可以为多铁方案(铁心长)也可以为多铜方案(多匝数,短铁心方案),在电机设计过程中要在保证电机力能指标,又要在温升允许的情况下,进行多方案比较,以节约原材料为优化方向,尽可能降低电机成本。
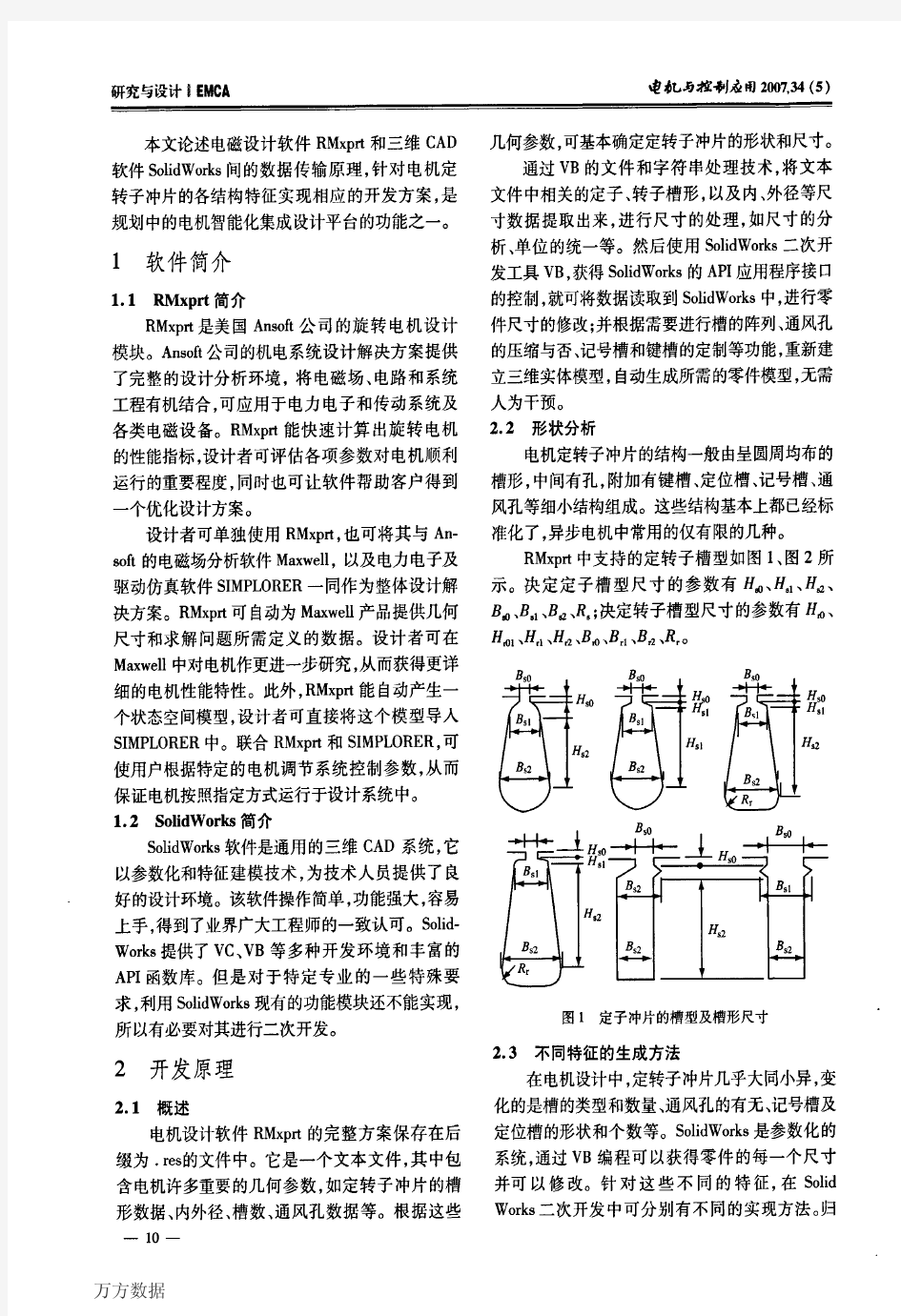
第二章 电机设计理论 本次的设计题目就是我公司下达的设计项目,本次设计它所依据的主要理论是三相异步电动机的原理及试验以及三相异步电动机的计算程序,将手算程序改编成计算机程序来进行本次设计项目Y560 IP23 6kV 10P 电机的三个规格、710kW 、800kW 、900kW 进行电磁计算,以确定参数,计算的目的是要保证电机的力能指标满足JB/T7593-94的标准规定,根据电磁计算结果来设计绘制出工作图满足生产需要。 2.1 电机设计的理论分析以及主要的计算公式 2.1.1 电机的磁路计算。 异步电机的磁路计算通常是从等效电路出发,求出电机的空载电流或其主要组成部分磁化电流、各种参数和损耗。磁路计算的主要目的是为了求出磁化电流,同时要校核电机磁路系统的尺寸,如电机的齿部和轭部的磁路不过分饱和以影响电机性能,又是电机的齿部和轭部太不饱和,造成电机的原材料的增加,以使电机的生产成本上升。电机的磁路计算还要给电机的性能计算提供数据。 由于电机的磁路计算是对称的,所以只计算一对磁极的磁路就可以了,又由于一对极的磁路对称于中心线,我们可以进行一个极的磁路计算,就是求出一个极磁路各段磁路所需磁势之和即: 2C 1C 2T 1T F F F F F F ++++=σ (2-1) σF -----空气隙所需磁势; 1T F -----定子齿所需磁势; 2T F -----转子齿所需磁势; 1C F ------定子轭所需磁势; 2C F -------转子轭所需磁势; 电机的磁路计算就是分别对上述磁路进行计算,以确定定转子冲片槽形尺寸是否合适,铁心的长度是否满足要求。计算采用的步骤如下: (1) 根据定子每相电势E 1,求出每极磁通φ; (2) 确定通过各段磁路的磁通φx ;
直线电机的PID控制器设计
基于MATLAB的直线电机PID控制器设计 摘要 随着现代工业的飞快发展,控制对象日益复杂,对其的性能控制要求也不断提高,致使人们寻找更好的控制方法,其中以改进PID控制最为典型。PID控制器具有结构简单、容易实现、控制效果好、鲁棒性强等特点,是目前最稳定的控制方法之一。它所涉及的参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。 直线电机是近年来国内外积极研究发展的新型电机之一,凭借自身的特性在以直线运动的工业控制中,有比旋转电机巨大的优越性。可广泛应用于交通运输、起重搬运、物流传输装置、国防及煤矿运输、车床进给等方面,发展前景十分广阔。 传统的比例积分微分( PID) 控制器参数往往因整定不良、性能欠佳,对运行状况的适应性很差。简单的控制又不能很好地适应对象系统特性变化时的最佳控制要求。因此,鉴于控制方法目前仍有广泛应用,对参数整定方法的研究将具有很好的应用价值。本文根据稳定边界法则及Ziegler-Nichol算法,以直线电机控制模型为例介绍如何在MATLAB 工具帮助下整定并验证PID 控制器参数,使参数的整定变得简单、易行,使整定效果更优化。 关键词:直线电机PID控制 MATLAB 控制系统参数整定系统仿真
Abstract: With the fast development of modern industry, more complicated control object, its performance control requirements improve continuously, cause people looking for better control method, which to improve PID control is the most typical example. The PID (Proportional-Integral-Derivative) control is one of the most common control methods at present. Its structure is simple and easy to implement, however, the control effect is perfect and it has a strong robust characteristics. The physical parameters is, meaning of ,theoretical analysis of system is integrity, and it is familiar by the engineering sector, which in the industrial process control has been widely used. Linear motor is one of the studied new motor. Because of its peculiarity, the linear motor performed better than rotary motor in the control systems when the moving route is linear. Its application range extends widely and widely. And it has been applied in many fields. However, the traditional parameter adaptability of proportion-integral-differential (PID) controller to the operating situation is very bad sometimes because the reduction and performance isn't good. Simple control and can't well adapt to changes in the system characteristics of the object of optimal control requirements. Therefore, in view of the control method is currently there are still widely used, to the study of the method of parameter setting will have a good application value. According to the stable boundary principle and Ziegler-Nichol algorithm, this paper introduces how to reduce and validate the PID controller parameter with the help of MATLAB tool taking the linear motor control model as an example. Making the parameters set becomes simple, easy to operate, and make the setting effect more optimization. Key words:Linear motor,PID control, Matlab, Control system, Parameters setting, System simulation
三相异步电动机设计分解
第三章:三相异步电动机设计 已 知:发电机输出功率:P N =6.1KW ,效率为90.9%, 电动机输出功率:P N =6.1/87%=7.01KW 根据已经设计的发电机,可选择Y132M-4作为它的原动机拖动发电。 Y132-M4异步电动机设计及磁路计算 已知数据: 输出功率 kw p 5.71= 额定电压 V U 3801= 相数 3=m 频率 HZ f 50= 极数 2=p B 级绝缘,连续运行 (一)额定数据和主要尺寸: 1. 额定功率:KW P n 5.7= 2. 额定电压:V U U N N 380==Φ (?接) 3. 功电流:A A mU P I N N kW 58.6380 3105.73 =??==Φ 4. 效率:87.0'=η 5. 功率因素:85.0cos '=? 6. 极对数:2=p 7. 定转子槽数 每相每极槽数取整数31=q 则363232211=???==mpq Z
322=Z 并采用斜肩平底槽 8. 定转子每极槽数 9436211=== p Z Z p 84 32222=== p Z Z p 9.确定电机电机主要尺寸 主要尺寸来确定l D i 和ef l 927 .0931.02013.05.7ln 0108.0931 .0013.0ln 0108.0'=+?-=+-=p P K N E 计算功率 KW P K P N E 4.98 5.087.0105.7927.0cos 3 ' '''=??? ==?η 初选68.0'=p a ,095.1'Nm K ,96.0'1=dp K 可取m A A 25600'=,取T B 67.0'=δ,假定min 1440'r n =。 3 3 ' ' ''' ''00324.01440 104.967.025600196.0095.168.01.611.61 m n p B A K K a V dp Nm p =??????=??=δ 取5.1=λ 则m m V p D il 141.000324.05.14 23 3 '=??=π λπ 按定子内外径比求出定子冲片外径
直线电机基本概念
直线电机基本概念 直线电机可以看作旋转电机结构上的一种演变,它可以看作将一台旋转电机沿径向剖开,然后将电机的圆周展开成直线。直线电机可分为:交流直线感应电动机(LIM),交流直线同步电动机(LSM)、直流直线电动机(LDM)、直线步进电动机(LPM)、混合式直线电动机(LHM)、微特直线电动机。其中交流直线同步电动机又分电磁式(EM)、永磁式(PM)、可变电阻(VR)、混合式(HB)、超导体(SC);直线直流电动机分为电磁式、永磁式、无刷;直线步进电动机分为可变电阻型和永磁型。 同步直线电动机的原理:直线同步电动机与直线异步电动机一样也是由旋转电机演化来的,其工作原理与旋转电机一样。直线同步电动机的磁极一般有直流励磁绕组励磁,或有永磁体励磁。在定子绕组产生的气隙行波磁场与磁极磁场的共同作用下,气隙磁场对磁极动子产生电磁推力。在这个电磁推力的作用下,如果初级是固定不动的,那么次级就沿着行波磁场的运动方向做直线运动。磁极运动的速度v就与行波磁场的移动速度一致,且v=2f t单位(m/s),t为极距。 同步直线电机与异步直线电机在性能、使用范畴上有何区别:直线异步电动机具有:成本低,相同容量的异步电动机的体积是同容量的同步电动机的6倍左右,常用变频器做速度控制,用于精度要求不是很高的场合。直线同步电动机具有更大的驱动力,其控制性能,位置精度更好,体积小,重量轻,且具有发电制动功能。永磁直线同步电动机可应用于各种精密加工设备上。但是成本相对较高。永磁体性能的提高和价格的下降,以及由永磁取代绕线式转子中的励磁绕组所带来的一系列优点:如转子无发热问题、控制系统简单、具有较高的运行效率和较高的运行速度等等。 动圈式直线电机与动磁式直线电机:永磁直线电动机可以做成动磁型,也可以做成动圈型。只要使永磁体产生的磁通由绕组通入直流电励磁产生,任何一种永磁式直线电动机都可以改为电磁式(动磁)直线电动机。动圈型结构具有体积小,成本低和效率高等优点。用于计算机硬盘驱动器的音圈电机(VCM)就是一种动圈型永磁直线直流电动机。动磁式直线电机没有线圈端部,电枢绕组得到完全利用;气隙均匀,消除电枢和磁极间的吸力。动圈式直线电机的动子惯量小,响应快;由于有导线连结,行程一般较小。动磁式与上述刚好相反。 圆筒型直线电机和平板型直线电机的本质区别:直线电机是从普通旋转电机演变来的,如果将普通旋转电机的圆筒型定子,转子剖开拉直,就成了平板型结构的直线电机,如果再把这种扁平的初级,次级卷绕在一根与磁场运动方向平行的轴上,即可得到一种与平板型直线电机完全不同的圆筒型直线电机。圆筒型直线电机的工作原理与直线电机的原理相似,当在初级绕组通入交流电源时,便在气隙中产生行波磁场,次级在行波磁场切割下,将感应电动势并产生电流,该电流与气隙中的磁场相互作用就产生电磁推力。如果初级固定,则次级在推力的作用下做直线运动。反之,则初级作直线运动。它把电能直接转变为直线运动的机械能而无中间变换装置。圆筒型直线电机也可分为同步式和感应式两类(也有步进式)。
两台三相交流异步电动机的设计
两台三相交流电动机配电柜的设计 毕 业 设 计 说 明 书 系部:机电工程系 专业:电气自动化 班级:08电气一班 姓名:张玉伟 指导老师:张勃老师第1页共26页
两台37KW三相交流异步电动机的动力配电柜的设计 第 2 页共26 页引言 本次设计对象为某乡工业用水水厂两台37kw三相交流电动机的动力配电柜,该配电柜是以交流50Hz,额定电压380v的低压电气柜。低压电气柜是集多个开关电器和相关的控制、测量、信号、保护、调节等单元于一体的一种电气设备。 本设计主要内容是两台37kw三相交流异步电动机的控制、低压控制电器的选择、低压控制电器的参数、指示灯、按钮、导线、母线排、接线端子的选择、三相交流笼型异步电动机主电路的设计、三相交流笼型异步电动机控制电路的设计、柜体的设计、电器布置图的设计、元件明细表、用Auto CAD完成控制电路接线图的绘制。 目前,国内实际使用的电控类和低压配电类电气柜的行业几乎包括了国民经济的全部行业。据有关资料显示,我国发电量及用电量以平均每年10%的速度增长,社会对高低压配电柜的需求量也逐渐加大,而本次设计的低压配电柜具有分断能力强、动热稳定性好、电气方案灵活、组合方便、实用性强、结构新颖等特点,使传统的高低压成套设备逐步向智能化、自动化方向发展。 编者 2011年3月
基本原理 该配电柜主要控制对象为工业用水水厂两台三相交流异步电动机,该柜是由柜体、母线、一二次元件、辅材等组成的完整设备,它在电网中起着接收和分配电能的作用,同时对电力设备起着控制和保护作用。其中母线板、刀开关、断路器、电流互感器、自耦变压器、交流接触器、热继电器组成的设备为一次设备。为了使一次系统能安全可靠、稳定地运行,随时监视一次系统运行状态,同时能随时控制一次系统所必须配备许多其他电器元件及设备,如:测量仪表(电流表)、控制信号元件(信号灯、按扭、转换开关等)、继电保护装置等。 首先该厂使用的是自扇冷式三相笼型异步电动机,其额定功率为37kw,额定电流为71.2A,额定工作电压为380v。对于电动机的起动,如果采用直接起动,起动电流将使电网电压发生较大的波动而影响其他电动机或电器的正常工作,所以,采用通过自耦变压器减压起动的方法。QS为刀开关,主要用于手动接通或分断开电流较小的电路。TA为电流互感器,它二次绕组的额定电流为5A,可以避免主电路的高压直接引入仪表、继电器,又可防止仪表、继电器的故障影响主电路,提高工作的安全性和可靠性。FR为热继电器,做电动机的过载保护。KM为交流接触器,是一种自动化的控制电器,主要用于频繁的接通和分断交直流电路,具有控制容量大,可远距离操作的优点。 第 3 页共26 页 3
直线电机概述120125145
河南机电高等专科学校 先进制造技术课程论文 论文题目:直线电机概述 系部:机械工程系 专业:起重运输机械设计与制造 班级:起机121 学生姓名:吴燚 学号:120125145 指导教师:安林超 2014年10月20日
绪论 直线电机也称线性电机,线性马达,直线马达,推杆马达在实际工业应用中的稳定增长,证明直线电机可以放心的使用。下面简单介绍直线电机类型和他们与旋转电机的不同。最常用的直线电机类型是平板式和U 型槽式,和管式。线圈的典型组成是三相,有霍尔元件实现无刷换相。 直线电机动子(forcer,rotor)是用环氧材料把线圈压成的。磁轨是把磁铁固定在钢上。 直线电机在过去的10年,经实践上引人注目的增长和工业应用的显著受益才真正成熟。 直线电机经常简单描述为旋转电机被展平,而工作原理相同。动子(forcer,rotor) 是用环氧材料把线圈压缩在一起制成的.而且,磁轨是把磁铁(通常是高能量的稀土磁铁)固定在钢上.电机的动子包括线圈绕组,霍尔元件电路板,电热调节器(温度传感器监控温度)和电子接口。在旋转电机中,动子和定子需要旋转轴承支撑动子以保证相对运动部分的气隙(air gap)。同样的,直线电机需要直线导轨来保持动子在磁轨产生的磁场中的位置。和旋转伺服电机的编码器安装在轴上反馈位置一样,直线电机需要反馈直线位置的反馈装置--直线编码器,它可以直接测量负载的位置从而提高负载的位置精度。 直线电机的控制和旋转电机一样。象无刷旋转电机,动子和定子无机械连接(无刷),不象旋转电机的方面,动子旋转和定子位置保持固定,直线电机系统可以是磁轨动或推力线圈动(大部分定位系统应用是磁轨固定,推力线圈动)。用推力线圈运动的电机,推力线圈的重量和负载比很小。然而,需要高柔性线缆及其管理系统。用磁轨运动的电机,不仅要承受负载,还要承受磁轨质量,但无需线缆管理系统。 相似的机电原理用在直线和旋转电机上。相同的电磁力在旋转电机上产生力矩在直线电机产生直线推力作用。因此,直线电机使用和旋转电机相同的控制和可编程配置。直线电机的形状可以是平板式和U 型槽式,和管式.哪种构造最适合要看实际应用的规格要求和工作环境。
直线电机应用机械设计指南+v3
直线电机应用机械设计指南
变更历史 序号日期工作人批准人变更描述 1 2011-1-05 王勇初始创建 2 2011-1-14 王勇内容补充 32011-8-4刘声发增加2个线圈安装方式 增加光栅尺安装精度要求
直线电机应用机械设计指南 (1) 1直线电机安装结构设计要求 (4) 1.1直线电机安装位置 (4) 1.2结构设计强度与刚度 (4) 1.3直线电机走线 (4) 1.4Z轴(垂直轴)刹车 (4) 1.5水平轴刹车 (5) 1.6安装尺寸精度 (6) 1.7防撞设计 (6) 2直线电机防护设计 (7) 2.1铁屑防护 (7) 2.2切削液防护 (7) 2.3其它运动部件的防护 (8) 3装配工艺 (9) 3.1装配的调整设计 (9) 3.2加工工艺结构设计 (9) 3.3装配的工装 (9) 3.4直线电机拆装顺序 (10) 3.5装配其它注意事项 (11) 3.6多个线圈并联安装方法 (11) 4光栅尺安装 (11) 4.1光栅尺安装位置及安装座要求 (12) 4.2光栅尺安装精度要求 (12) 4.3光栅尺的防护 (12) 5直线电机的冷却 (14) 5.1冷却功率 (14) 5.2回路设计 (14)
1直线电机安装结构设计要求 1.1直线电机安装位置 直线电机、磁板的安装位置,应当尽量设计靠近运动结构的重心位置,以平衡运动时的推力 1.2结构设计强度与刚度 直线电机与磁板之间持续存在较大的磁吸力,如 CE133A吸力为6480N,CE266A吸力为12960N; 工作台、鞍座等设计时,必须考虑有足够的强度和刚度。同时,为避免移动部件过于笨重,应尽量考虑采用高强度的材质,以及多筋板结构。 其它结构上提高刚度的办法有: z上拱结构 z导轨等支撑点尽量靠近直线电机线圈 z机床的固定部分刚性尽可能高、移动部分的重量尽可能轻,因为直线电机对刚性和移动部分重量比旋转电机更敏感 1.3直线电机走线 直线电机相对于旋转伺服电机的系统而言,由于其推进动力在移动部件上,而旋转伺服电机在固定部件上,所以走线较旋转伺服电机复杂,许多线缆都需要通过拖链来连接,主要需要通过拖链的线缆有: 线圈的动力线 线圈的冷却管路 光栅尺读数头的数据线(如果读数头设计在移动部件上) 导轨润滑油管路 这些走线均需要通过拖链连接,请务必在设计时详尽考虑。 1.4Z轴(垂直轴)刹车 直线电机应用在Z轴(垂直轴)上时,由于重力的作用,在未通电时,或直线电机无力矩输出时,会发生掉落事故。必须设计Z轴的刹车装置。
(整理)三相电机设计常用公式
电机设计计算常用公式 1.输出功率2P 2P 2.外施相电压1U 1U 3.功电流KW I 1 13 210U m P I KW ??= 4.效率η' η' 5.功率因数?'cos ?'cos 6.极数p p 7.定子槽数1Q 1Q 转子槽数2Q 2Q 8.定子每极槽数 p Q Q P 11= 转子每极槽数 p Q Q P 2 2= 9.定转子冲片尺寸见图 10.极距P τ p D i P 1 ?= πτ 11.定子齿距1t 1 1 1Q D t i ?= π 12.转子齿距2t 2 2 2Q D t ?= π 13.节距y y 14.转子斜槽宽SK B SK B
15.每槽导体数1Z 1Z 16.每相串联导体数1φZ 1 11 11a m Z Q Z ??= φ 式中: 1a = 17.绕组线规(估算) ?η' ?'= ' '??'=' ?' cos 11 1111KW I I a I S N 式中:导线并绕根数·截面积 '?'11S N 查表 取' ?'11S N 定子电流初步估算值 ?η' ?'= 'cos I I KW 1 定子电流密度' ?1 '?1 18.槽满率 (1)槽面积 2 2221R h h b R S S S S π+ ??? ??-'+= (2)槽绝缘占面积 ?? ? ??+++' =122S S i i b R R h C S π (3)槽有效面积 i S e S S S -= (4)槽满率 e f S d Z N S 2 11??= 绝缘厚度i C i C 导体绝缘后外径d d 槽契厚度h h 19.铁心长l 铁心有效长 无径向通风道 g l l eff 2+= 净铁心长 无径向通风道 l K l Fe Fe ?= 铁心压装系数Fe K Fe K 20.绕组系数 111p d dp K K K ?=
电机设计知识点总结
电机设计知识点总结 《电机设计》是XX年6月1日清华大学出版社出版的图书,作者是戴文进。以下是小编整理的电机设计知识点总结,欢迎阅读。 电机设计的任务是根据用户提出的产品规格、技术要求,结合技术经济方面国家的方针政策和生产实际情况,运用有关的理论和计算方法,正确处理设计是遇到的各种矛盾,从而设计出性能良好、体积小、结构简单、运行可靠、制造和使用维修方便的先进产品。 额定功率 额定电压 相数及相间连接方式 额定频率 额定转速或同步转速 额定功率因数 1、准备阶段 通常包括两个方面的内容:首先是熟悉相关打国家标准,手机相近电机的产品样本和技术资料,并听取生产和使用单位的意见和要求;其次是在国家标准及分析有过资料的基础上编制技术任务书或技术建议书。 2、电磁设计 本阶段的任务是根据技术任务书的规定,参照生产实践
经验,通过计算和方案比较来确定与所设计电机电磁性能有关的的尺寸和数据,选定有关材料,并和算其电磁性能。 3、结构设计 结构设计的任务是确定电机的机械结构、零部件尺寸、加工要求与材料的规格及性能要求,包括必要的机械计算及通风和温升计算。 结构设计通常在电磁设计之后进行,但有时也和电磁设计平行交叉的进行,以便相互调整。 一、负载的转矩特性:负载的转矩特性是指生产机械工作机构的负载转矩与转速之间的关系即:n=f___恒转矩负载特性恒转矩负载是指负载转矩为常数, 其大小与转速n无关,恒转矩负载分反抗性恒转矩负载和位能性恒转矩负载。反抗性恒转矩负载特性:恒值负载转矩Tf总是与转速nf的方向相反,即作用方向是阻碍运动的方向。当正转时nf为正, Tf与nf方向相反,应为正,即在第一象限,当反转时nf为负, Tf与nf方向相反,应为负,即在第三象限;当转速nf=0时外加转矩不足以使系统运动。位能性恒转矩负载特性特点:Tf的方向与nf的方向无关。 Tf具有固定不变的方向。例如:起重机的提升机构,不论是提升重物还是下放重物,重力的作用总是方向朝下的,即重力产生的负载转矩方向固定。当nf>0时, Tf>0,是阻碍运动的制动性转矩;当nf0,是帮助运动的拖动性转矩。故
直线电机参数
介绍直线电机参数和选型 1.最大电压( max. voltage ph-ph) ———最大供电线电压,主要与电机绝缘能力有关;《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 2.最大推力(Peak Force) ———电机的峰值推力,短时,秒级,取决于电机电磁结构的安全极限能力;《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 3.最大电流(Peak Current) ———最大工作电流,与最大推力想对应,低于电机的退磁电流; 4.最大连续消耗功率(Max. Continuous Power Loss) ———确定温升条件和散热条件下,电机可连续运行的上限发热损耗,反映电机的热设计水准; 5.最大速度(Maximum speed) ———在确定供电线电压下的最高运行速度,取决于电机的反电势线数,反映电机电磁设计的结果; 6.马达力常数(Motor Force Constant) ———电机的推力电流比,单位N/A或KN/A,反映电机电磁设计的结果,在某种意义上也可以反映电磁设计水平; 7.反向电动势(Back EMF) ———电机反电势(系数),单位Vs/m,反映电机电磁设计的结果,影响电机在确定供电电压下的最高运行速度; 8.马达常数(Motor Constant) ———电机推力与功耗的平方根的比值,单位N/√W,是电机电磁设计和热设计水平的综合体现; 9.磁极节距NN(Magnet Pitch) ————电机次级永磁体的磁极间隔距离,基本不反映电机设计水平,驱动器需据此由反馈系统分辨率解算矢量控制所需的电机电角度; 10.绕组电阻/每相(Resistance per phase)———电机的相电阻,下给出的往往是线电阻,即Ph -Ph,与电机发热关系较大,在意义下可以反映电磁设计水平; 11.绕组电感/每相(Induction per phase) ———电机的相电感,下给出的往往是线电感,即Ph -Ph,与电机反电势有关系,在意义下可以反映电磁设计水平; 12.电气时间常数(Electrical time constant) ———电机电感与电阻的比值,L/R; 13.热阻抗(Thermal Resistance) ———与电机的散热能力有关,反映电机的散热设计水平; 14.马达引力(Motor Attraction Force) ———平板式有铁心结构直线电机,尤其是永磁式电机,次极永磁体对初级铁心的法向吸引力,高于电机额定推力一个数量级,直接决定采用直线电机的直线运动轴的支撑导轨的承载能力和选型。《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 直线电机的选型首选推力速度,然后看连续消耗功率、热阻和散热方式和条件等,再次看供电电压和电流,对快速性有要求还要看电气时间常数。个人意见,最最反映直线电机性能水平的是推力平稳性、电机常数和热阻,不过推力平稳性指标多数厂家未必会直接给出。《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 电机的推力系数以出力电流比来标示,比如N/A,Nm/A《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》 反电势系数用电压速度比来标示,比如V/(m/s),V/(rpm)等《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。》