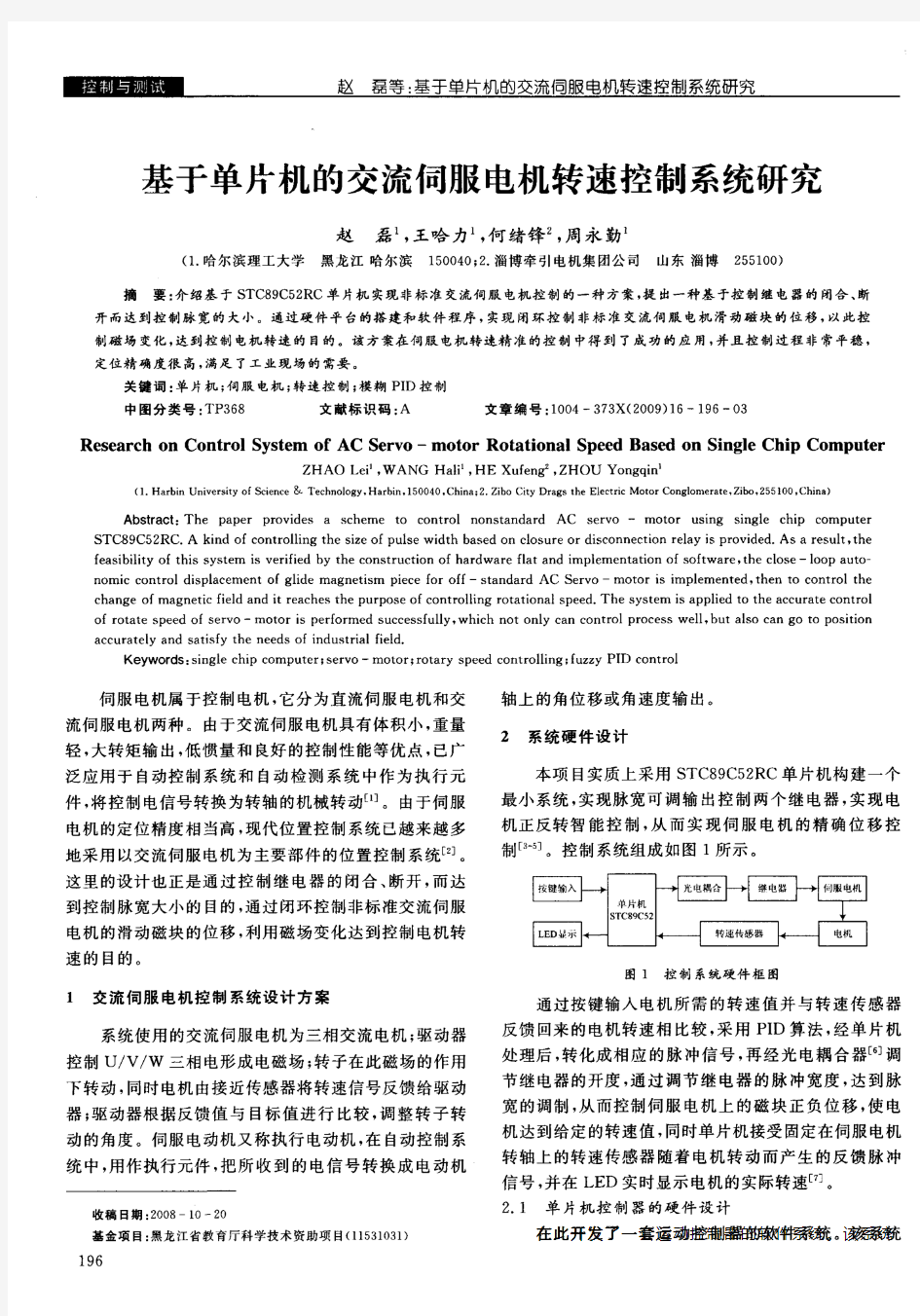
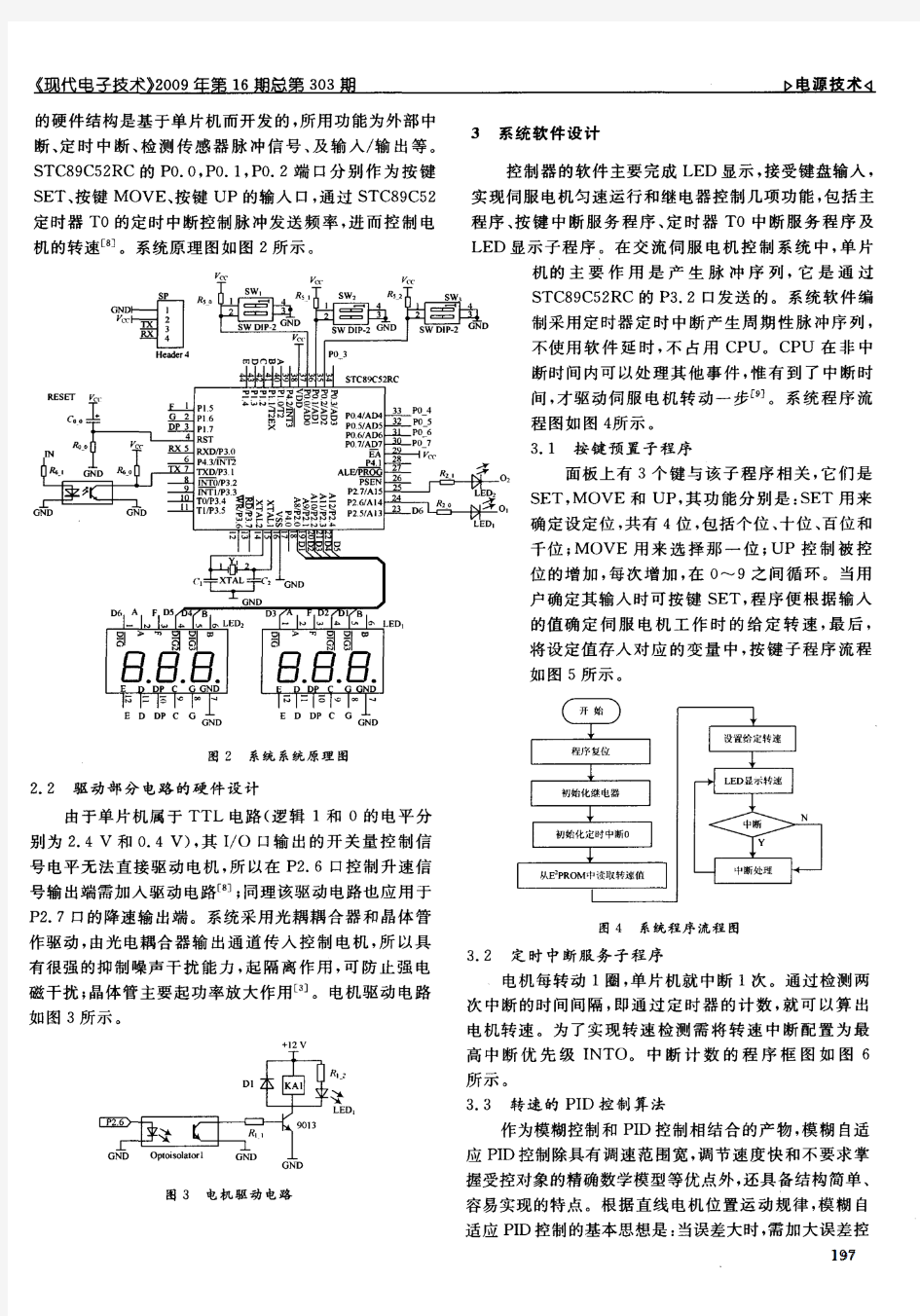
基于单片机的交流伺服电机转速控制系统研究
基于单片机的直流伺服电机转速控制课程设计
近年来,随着科技的飞速发展,单片机的应用正在不断地走向深入。在仪器仪表、家用电器和专用装备的智能化以及过程控制等方面,单片机都扮演着越来越重要的角色。作为高等工科院校,将单片机的应用引入实验教学必将对微电子控制技术的研究与实践注入强大活力。我们研制的直流伺服电机控制实验装置即以单片机作为核心部件,它可完成对直流伺服电机转速、方向、行程的闭环控制。本文重点论述该实验装置的硬件组成,软件设计以及控制方案的实施。 1 系统硬件组成 本系统由IBM-PC机、MCS-51单片机开发系统、模拟控制板、PWM脉宽 调制控制板以及带齿片和光电传感器的直流伺服电动机等组成。 1.1 以IBM-PC机作为本系统的辅助机 为了便于对单片机进行有效的开发,通过RS-232串行接口直接与IBM-PC机相连,使单片开发机能充分利用IBM-PC的CRT、磁盘、打印机和各种软硬件资源。可同时在IBM-PC机上进行编辑程序—交叉汇编—屏幕模拟调试,最后通过串行通讯软件将目标程序传输到单片开发机上,从而极大地方便了程序的调试。 1.2 MCS-51单片开发机 通过一条40芯仿真插头使该单片开发机与直流伺服电机控制板相连,系统在总线控制器的作用下,使8031在监控状态和用户状态之间切换。实验程序有单步断点、连续运行方式,包括INT0,INT1,T0,T1和串行口的中断服务程序。1.3 模拟控制板 该板由DAC0832数模转换器、译码电路、T1中断信号整形电路、运算放大器电路及三极管驱动电路组成。译码电路完成对DAC0832的片选,0832芯片完成数字量到模拟量的转换。四运放芯片F324,前两级运放构成双极性输出,其输出正、负由单片机输出的代码决定,即D7=0输出为正,D7=1输出为负,由此驱动电机正、反转。第三级运放为电压放大,将±5V放大到±12V,运放后面跟着两级功放,为射级跟随器输出形式。 1.4 PWM脉宽调制控制板 该板由T9224光电隔离、T1中断信号整形、电机转向控制以及功放驱动电路组成。采用脉宽调制控制电机的转速,首先要确定采样周期和定时脉冲周期以
直流伺服电机控制系统设计
电子信息与电气工程系课程设计报告 设计题目:直流伺服电机控制系统设计 系别:电子信息与电气工程系 年级专业: 学号: 学生姓名: 2006级自动化专业《计算机控制技术》课程设计任务书
摘要 随着集成电路技术的飞速发展,微控制器在伺服控制系统普遍应用,这种数字伺服系统的性能可以大大超过模拟伺服系统。数字伺服系统可以实现高精度的位置控制、速度跟踪,可以随意地改变控制方式。单片机和DSP在伺服电机控制中得到了广泛地应用,用单片机作为控制器的数字伺服控制系统,有体积小、可靠性高、经济性好等明显优点。。本设计研究的直流伺服电机控制系统即以单片机作为核心部件,主要是单片机为控制核心通过软硬件结合的方式对直流伺服电机转速实现开环控制。 对于伺服电机的闭环控制,采用PID控制,利用MATLAB软件对单位阶跃输入响应的PID 校正动态模拟仿真,研究PID控制作用以及PID各参数值对控制系统的影响,通过试凑法得到最佳PID参数。同时能更深度地掌握在自动控制领域应用极为广泛的MATLAB软件。 关键词:单片机直流伺服电机 PID MATLAB
目录 1.引言 ...................................................... 错误!未定义书签。2.单片机控制系统硬件组成.................................... 错误!未定义书签。 微控制器................................................ 错误!未定义书签。 DAC0808转换器.......................................... 错误!未定义书签。 运算放大器............................................... 错误!未定义书签。 按键输入和显示模块....................................... 错误!未定义书签。 按键输入............................................ 错误!未定义书签。 显示模块............................................ 错误!未定义书签。 直流伺服电动机.......................................... 错误!未定义书签。 3.单片机控制系统软件设计..................................... 错误!未定义书签。 主程序................................................... 错误!未定义书签。 键盘处理子程序........................................... 错误!未定义书签。 4.控制系统原理图及仿真....................................... 错误!未定义书签。 控制系统方框图........................................... 错误!未定义书签。 控制系统电路原理图....................................... 错误!未定义书签。 Proteus仿真结果........................................ 错误!未定义书签。组件对直流伺服控制系统的仿真................................. 错误!未定义书签。 MATLAB与Simulink简介.................................. 错误!未定义书签。 MATLAB简介......................................... 错误!未定义书签。 Simulink简介....................................... 错误!未定义书签。 直流伺服电机数学模型.................................... 错误!未定义书签。 系统Simulink模型及时域特性仿真......................... 错误!未定义书签。 开环系统Simulink模型及仿真......................... 错误!未定义书签。 单位负反馈系统Simulink模型及仿真................... 错误!未定义书签。 PID校正................................................ 错误!未定义书签。 PID参数的凑试法确定................................ 错误!未定义书签。 比例控制器校正...................................... 错误!未定义书签。 比例积分控制器校正.................................. 错误!未定义书签。 PID控制器校正...................................... 错误!未定义书签。6.小结...................................................... 错误!未定义书签。参考文献..................................................... 错误!未定义书签。附录 ........................................................ 错误!未定义书签。
伺服电机原理及选型.
什么是伺服电机? 伺服电机:是在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。伺服电机是可以连续旋转的电-机械转换器。作为液压阀控制器的伺服电机,属于功率很小的微特电机,以永磁式直流伺服电机和并激式直流伺服电机最为常用。 伺服电机的作用:伺服电机可使控制速度,位置精度非常准确。 伺服电机的分类:直流伺服电机和交流伺服电机。 直流伺服电机的输出转速与输入电压成正比,并能实现正反向速度控制。具有起动转矩大,调速范围宽,机械特性和调节特性的线性度好,控制方便等优点,但换向电刷的磨损和易产生火花会影响其使用寿命。近年来出现的无刷直流伺服电机避免了电刷摩擦和换向干扰,因此灵敏度高,死区小,噪声低,寿命长,对周围电子设备干扰小。 直流伺服电机的输出转速/输入电压的传递函数可近似视为一阶迟后环节,其机电时间常数一般大约在十几毫秒到几十毫秒之间。而某些低惯量直流伺服电机(如空心杯转子型、印刷绕组型、无槽型的时间常数仅为几毫秒到二十毫秒。 小功率规格的直流伺服电机的额定转速在3000r/min以上,甚至大于 10000r/min。因此作为液压阀的控制器需配用高速比的减速器。而直流力矩伺服电机(即低速直流伺服电机可在几十转/分的低速下,甚至在长期堵转的条件下工作,故可直接驱动被控件而不需减速 直流伺服电机分为有刷和无刷电机。 有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷,产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。 交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。大惯量,最高转动速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。 交流伺服电机的工作原理 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数。 交流伺服电机和无刷直流伺服电机在功能上有什么区别? 交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。 永磁交流伺服电动机 20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。永磁交流伺服电动机同直流伺服电动机比较,主要优点有: ⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。 ⑵定子绕组散热比较方便。
基于单片机的直流伺服电机PWM控制系统
成绩 运动控制系统 课程设计 题目: 基于单片机的直流伺服电机PWM控制系统 院系名称: 电气工程学院 专业班级: xxx 学生姓名: xxx 学号: xxxx 指导教师: 石庆生
摘要 单片机是应控制领域应用的要求而出现的,随着单片机的迅速发展,起应用领域越来越广。尽管目前已经发展众多种类的单片机,但是应用较广、也是最成熟的还是最早有Intel开发的MCS-51系列单片机(51系列单片机)。51系列单片机应用系统已经成为目前主流的单片机应用系统。 直流电机脉冲宽度调制(Pulse Width Modulation—简称PWM)调速产生于20世纪70年代中期,最早用于自动跟踪天文望远镜,自动记录仪表等的驱动,后来用于晶体管器件水平的提高及电路技术的发展,PWM技术得到了高速发展,各式各样的脉宽调速控制器,脉宽调速模块也应运而生,许多单片机也都有了PWM输出功能。而MCS—51系列单片机作为应用最广泛的单片机之一,却没有PWM 输出功能,本课设采用配合软件的方法实现了MCS—51单片机的PWM输出调速功能,这对精度要求不高的场合时非常实用的。
目录 1、前言 (1) 1.1单片机的发展史 (1) 1.2本设计任务 (1) 2、总体设计方案 (2) 3、硬件电路设计 (2) 3.1硬件组成 (2) 3.2主要器件功能介绍 (3) 3.2.1直流伺服电机简介 (3) 3.2.2 PWM简介及调速原理 (4) 3.2.3 传感器选择 (5) 3.3电路组成 (6) 3.3.1 晶振电路 (6) 3.3.2 复位电路 (6) 3.3.3 单相桥式整流电路 (7) 3.3.4 调制电路 (7) 4、系统软件设计 (8) 4.1系统简介及原理 (8) 4.2系统设计原理 (8) 4.3程序流程图 (10) 5、建模 (11) 5.1控制框图 (11) 5.2参数计算 (12) 5.3PWM变换器环节的数学模型 (14) 5.4仿真结果图 (14) 总结 (16) 参考文献 (17) 附件1:汇编设计 (18) 附件2: (20)
《伺服控制系统课程设计》
《伺服控制系统课程设计》 指导书 ?动化与电??程学院 ?零??年??
?、伺服控制系统课程设计的意义、?标和程序 (3) ?、伺服控制系统课程设计内容及要求 (5) 三、考核?式和报告要求 (11)
?、伺服控制系统课程设计的意义、?标和程序 (?)伺服控制系统程设计的意义 伺服控制系统课程设计是?动化专业?才培养计划的重要组成部分,是实现培养?标的重要教学环节,是?才培养质量的重要体现。通过伺服控制系统课程设计,可以培养考??所学基础课及专业课知识和相关技能,解决具体的?程问题的综合能?。本次课程设计要求考?在指导教师的指导下,独?地完成伺服控制系统的设计和仿真,解决与之相关的问题,熟悉伺服控制系统中控制器设计与整定、电机建模和仿真和其他检测装置的选型以及?程实践中常?的设计?法,具有实践性、综合性强的显著特点。因?对培养考?的综合素质、增强?程意识和创新能?具有?常重要的作?。 伺服控制系统课程设计是考?在课程学习结束后的实践性教学环节;是学习、深化、拓宽、综合所学知识的重要过程;是考?学习、研究与实践成果的全?总结;是考?综合素质与?程实践能?培养效果的全?检验;也是?向?程教育认证?作的重要评价内容。 (?)课程设计的?标 课程设计基本教学?标是培养考?综合运?所学知识和技能,分析与解决?程实际问题,在实践中实现知识与能?的深化与升华,同时培养考?严肃认真的科学态度和严谨求实的?作作风。使考?通过综合课程设计在具备?程师素质??更快地得到提?。对本次课程设计有以下???的要求: 1.主要任务 本次任务在教师指导下,独?完成给定的设计任务,考?在完成任务后应编写提交课程设计报告。 2.专业知识
交流伺服电机与运动控制卡的接口实验
交流伺服电机与运动控制卡的接口实验 一、实验目的 1.认知富士交流伺服电机及驱动器的硬件接口电路 2.认知MPC2810运动控制卡的硬件接口 3.掌握驱动器与MPC2810运动控制卡的硬件连接 二、实验器材 MPC2810运动控制卡、富士交流伺服电机及驱动器,数控实验台II,若干导线,万用表 三、实验内容及步骤 有关富士交流伺服电机及驱动器的详细信息参见《富士AC 伺服系统FALDIC-W 系列用户手册》,有关MPC2810运动控制卡的详细信息参见《MPC2810运动控制器用户手册》。 一)、MPC2810运动控制器相关简介 MPC2810运动控制器是乐创自动化技术有限公司自主研发生产的基于PC的运动控制器,单张卡可控制4轴的步进电机或数字式伺服电机。通过多卡共用可支持多于4轴的运动控制系统的开发。 MPC2810运动控制器以IBM-PC及其兼容机为主机,基于PCI总线的步进电机或数字式伺服电机的上位控制单元。它与PC机构成主从式控制结构:PC机负责人机交互界面的管理和控制系统的实时监控等方面的工作(例如键盘和鼠标的管理、系统状态的显示、控制指令的发送、外部信号的监控等等);运动控制器完成运动控制的所有细节(包括直线和圆弧插补、脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等等)。 MPC2810运动控制器配备了功能强大、内容丰富的Windows动态链接库,可方便地开发出各种运动控制系统。对当前流行的编程开发工具,如Visual Basic6.0,Visual C++6.0提供了开发用Lib库及头文件和模块声名文件,可方便地链接动态链接库,其他32位Windows开发工具如Delphi、C++Builder等也很容易使用MPC2810函数库。另外,支持标准Windows动态链接库调用的组态软件也可以使用MPC2810运动控制器。 MPC2810运动控制器广泛适用于:激光加工设备;数控机床、加工中心、机器人等;X-Y-Z控制台;绘图仪、雕刻机、印刷机械;送料装置、云台;打标机、绕线机;医疗设备;包装机械、纺织机
PLC控制伺服电机的方法
伺服电机的PLC控制方法 以松下Minas A4系列伺服驱动器为例,介绍PLC控制伺服电机的方法。伺服电机有三种控制模式:速度控制,位置控制,转矩控制{由伺服电机驱动器的Pr02参数与32(C-MODE)端子状态选择},本章简要介绍位置模式的控制方法 一、按照伺服电机驱动器说明书上的"位置
控制模式控制信号接线图"连接导线 3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC 的输出端子)。 5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。当此端子接收信号变化时,伺服电机的运转方向改变。实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。 7(com+)与外接24V直流电源的正极相连。 29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。 上面所述的六根线连接完毕(电源、编
码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。构成更完善的控制系统。 二、设置伺服电机驱动器的参数。 1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。 2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也
伺服驱动系统方案设计
伺服驱动系统设计方案 伺服电机的原理: 伺服的基本概念是准确、精确、快速定位。与普通电机一样,交流伺服电机也由定子和转子构成。定子上有两个绕组,即励磁绕组和控制绕组,两个绕组在空间相差90°电角度。伺服电机内部的转子是永磁铁,驱动控制的u/V/W三相电形成电磁场转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度{线数)。 伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降作用:伺服电机,可使控制速度,位置精度非常准确。 交流伺服电机的工作原理和单相感应电动机无本质上的差异。但是,交流伺服电机必须具备一个性能,就是能克服交流伺服电机的所谓“自转”现象,即无控制信号时,它不应转动,特别是当它已在转动时,如果控制信号消失,它应能立即停止转动。而普通的感应电动机转动起来以后,如控制信号消失,往往仍在继续转动。 交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点: 1、起动转矩大 由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。 图3 伺服电动机的转矩特性
交流伺服电机选型重点学习的手册范本.doc
ST 系列交流伺服电机型号编号说明 1:表示电机外径 , 单位 :mm。 2:表示电机是正弦波驱动的永磁同步交流伺服电机。 3:表示电机安装的反馈元件,M—光电编码器,X—旋转变压器。 4:表示电机零速转矩,其值为三位数×,单位:Nm。 5:表示电机额定转速,其值为二位数×100,单位: rpm。 6:表示电机适配的驱动器工作电压,L— AC220V, H— AC380V。 7:表示反馈元件的规格,F—复合式增量光电编码器(2500 C/T ), R— 1 对极旋转变压器。 8:表示电机类型,B—基本型。 9:表示电机安装了失电制动器。 SD系列交流伺服驱动器型号编号说明 1:表示采用空间矢量调制方式(SVPWM)的交流伺服驱动器 2:表示 IPM 模块的额定电流( 15/20/30/50/75A ) 3:表示功能代码( M:数字量与模拟量兼容) ●交流伺服电机与伺服驱动器适配表 ST系列电机ST系列电机ST 系列电机主要参数 适配驱动器 额定功率 电机型号额定转矩额定转速外形尺寸零售价 ( 元 ) 110ST-M02030 2 Nm 3000rpm 110×110×158 1500 110ST-M04030 4 Nm 3000rpm 110×110×185 1700 110ST-M05030 5 Nm 3000rpm 110×110×2001800 110ST-M06020 6 Nm 2000rpm SD15M 110×110×217 1900 SD20MN 110ST-M06030 6 Nm 3000rpm SD30MN 110×110×217 1900 SD50MN 130ST-M04025 4 Nm 2500rpm SD75MN 130×130×163 1800 130ST-M05025 5 Nm 2500rpm 130×130×171 2100 130ST-M06025 6 Nm 2500rpm 130×130×181 2400 130ST-M07720Nm2000rpm130×130×1952900
交流伺服电机的工作原理
交流伺服电机的工作原理 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 4. 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降, 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。 永磁交流伺服电动机 20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。永磁交流伺服电动机同直流伺服电动机比较,主要优点有: ⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。 ⑵定子绕组散热比较方便。 ⑶惯量小,易于提高系统的快速性。 ⑷适应于高速大力矩工作状态。 ⑸同功率下有较小的体积和重量。 自从德国MANNESMANN的Rexroth公司的Indramat分部在1978年汉诺威贸易博览会上正式推出MAC永磁交流伺服电动机和驱动系统,这标志着此种新一代交流伺服技术已进入实用化阶段。到20世纪80年代中后期,各公司都已有完整的系列产品。整个伺服装置市场都转向了交流系统。早期的模拟系统在诸如零漂、抗干扰、可靠性、精度和柔性等方面存在不足,尚不能完全满足运动控制的要求,近年来随着微处理器、新型数字信号处理器(DSP)的应用,出现了数字控制系统,控制部分可完全由软件进行,分别称为摪胧 只瘮或摶旌鲜綌、撊只瘮的永磁交流伺服系统。 到目前为止,高性能的电伺服系统大多采用永磁同步型交流伺服电动机,控制驱动器多采用快速、准确定位的全数字位置伺服系统。典型生产厂家如德国西门子、美国科尔摩根和日本松下及安川等公司。 日本安川电机制作所推出的小型交流伺服电动机和驱动器,其中D系列适用于数控机床(最高转速为1000 r/min,力矩为0.25~2.8N.m),R系列适用于机器人(最高转速为3000r/min,力矩为0.016~0.16N.m)。之后又推出M、F、S、H、C、G 六个系列。20世纪90年代先后推出了新的D系列和R系列。由旧系列矩形波驱动、8051单片机控制改为正弦波驱动、80C、154CPU和门阵列芯片控制,力矩波动由24%降低到7%,并提高了可靠性。这样,只用了几年时间形成了八个系列(功率范围为0.05~6kW)较完整的体系,满足
伺服控制系统(设计)
第一章伺服系统概述 伺服系统是以机械参数为控制对象的自动控制系统。在伺服系统中,输出量能够自动、快速、准确地跟随输入量的变化,因此又称之为随动系统或自动跟踪系统。机械参数主要包括位移、角度、力、转矩、速度和加速度。 近年来,随着微电子技术、电力电子技术、计算机技术、现代控制技术、材料技术的快速发展以及电机制造工艺水平的逐步提高,伺服技术已迎来了新的发展机遇,伺服系统由传统的步进伺服、直流伺服发展到以永磁同步电机、感应电机为伺服电机的新一代交流伺服系统。 目前,伺服控制系统不仅在工农业生产以及日常生活中得到了广泛的应用,而且在许多高科技领域,如激光加工、机器人、数控机床、大规模集成电路制造、办公自动化设备、卫星姿态控制、雷达和各种军用武器随动系统、柔性制造系统以及自动化生产线等领域中的应用也迅速发展。 1.1伺服系统的基本概念 1.1.1伺服系统的定义 “伺服系统”是指执行机构按照控制信号的要求而动作,即控制信号到来之前,被控对象时静止不动的;接收到控制信号后,被控对象则按要求动作;控制信号消失之后,被控对象应自行停止。 伺服系统的主要任务是按照控制命令要求,对信号进行变换、调控和功率放大等处理,使驱动装置输出的转矩、速度及位置都能灵活方便的控制。
1.1.2伺服系统的组成 伺服系统是具有反馈的闭环自动控制系统。它由检测部分、误差放大部分、部分及被控对象组成。 1.1.3伺服系统性能的基本要求 1)精度高。伺服系统的精度是指输出量能复现出输入量的精确程度。 2)稳定性好。稳定是指系统在给定输入或外界干扰的作用下,能在短暂的调节过程后,达到新的或者恢复到原来的平衡状态。 3)快速响应。响应速度是伺服系统动态品质的重要指标,它反映了系统的跟踪精度。 4)调速范围宽。调速范围是指生产机械要求电机能提供的最高转速和最低转速之比。 5)低速大转矩。在伺服控制系统中,通常要求在低速时为恒转矩控制,电机能够提供较大的输出转矩;在高速时为恒功率控制,具有足够大的输出功率。 6)能够频繁的启动、制动以及正反转切换。 1.1.4 伺服系统的种类 伺服系统按照伺服驱动机的不同可分为电气式、液压式和气动式三种;按照功能的不同可分为计量伺服和功率伺服系统,模拟伺服和功率伺服系统,位置
最新单片机控制伺服电机
单片机控制伺服电机
基于DSP的多伺服电机同步驱动系统设计 作者姓名:闫瑞 刘呈坤 戚龙欣 边俊霞 指导老师:马凤英
目录 摘要 (1) 第一章绪论 (2) 1.1 课题研究的目的和意义 (2) 1.2 国内现状与发展趋势 (2) 1.3伺服电机发展历史 (3) 2.2 伺服电机工作理 (4) 第二章伺服电机控制硬件设计 (5) 2.1 AT89C51单片机硬件结构 (5) 2.2 钟电路设计 (8) 2.3 复位电路设计 (8) 2.4 显示电路设计 (8) 2.5按键电路设计 (11) 2.6 控制伺服电机电路设计 (12) 第三章系统软件设计 (14) 3.1 总体设计思想 (14) 3.2 主程序设计 (15) 程序清单 (16) 参考文献 (18)
摘要 半个世纪来,直流伺服控制系统己经在精密数控机床、加工中心、机器人等领域得到了广泛的应用。随着伺服电动机技术、电力电子技术、计算机控制技术的发展,使得伺服控制系统朝着控制电路数字化和功率器件的模块化的方向发展。 本文介绍了微机直流伺服系统的硬件、软件设计方案。硬件设计主要包括:总体方案设计、单片机应用系统设计、驱动电路设计和测量电路设计。软件编制采用模块化的设计方式,主要包括主程序设计及数字控制算法程序的设计。 通过系统的整体设计,完成了系统的基本要求,系统可以稳定的运行。 关键词:伺服系统单片机 Abstract For a half of century,the DC servo control system has been widely used in the NC machine tool,machining center,and robot…,etc. With the technical development of servo motor,electronices power and computer control,the servo control system is making towards digitized and modular design. This paper introduces the hardware,software design plan of DC servo control system on microcomputer. The hardware designed includes mainly: the total project design,single-chip computer application system design,drive circuit design and measure circuit design. The software a dots modular design,includes primarily the main procedure design and increases the design of the deal type arithmetic figure PID calculation way procedure. Through the integral design of the system, the completion of the basic requirements of the system, the system can stable operation Keywords: servo system microcontroller
直流无刷伺服电机运动控制系统设计
直流无刷伺服电机运动控制系统设计 Motionchip是一种性能优异的专用运动控制芯片,扩展容易,使用方便。本文基于该芯片设计了一款可用于直流有刷/无刷伺服电机的智能伺服驱动器,并将该驱动器运用到加氢反应器超声检测成像系统中,上位机通过485总线分别控制直流有刷电机和无刷电机,取得了很好的控制效果,满足了该系统的高精度要求。 在传统的电机伺服控制装置中,一般采用一个或多个单片机作为伺服控制的核心处理器。由于这种伺服控制器外围电路复杂,计算速度慢,从而导致控制效果不理想。近年来,许多新的电机控制算法被研究并运用于电机控制系统中,如矢量控制、直接转矩控制等。随着这些控制算法的日益复杂,必须具备高速运算能力的处理器才能实现实时计算和控制。为了适应这种需要,国外许多公司开发了控制电机专用的高档单片机和数字信号处理器(DSP)。现在,通常使用的伺服控制器的控制核心部分大都由DSP和大规模可编程逻辑器件组成,这种方案可以根据不同需要,灵活的设计出性能很好的专用伺服控制器,但是一般研制周期都比较长。 MotionChip的特点 MotionChip是瑞士Technosoft公司开发的一种高性能且易于使用的电机运动控制芯片,它是基于TMS320C240的DSP,外围设置了许多电机伺服控制专用的可编程配置管脚。TMS320C240是美国TI公司推出的电机控制专用16位定点数字信号处理器,其具有高速的运算能力和专为电机控制设计的外围接口电路。MotionChip很好的利用了该DSP的优点,并集成多种电机控制算法于一身,以简化用户设计难度为目的,设计成为一种新颖的电机专用控制芯片。MotionChip有着集成全部必要的配置功能在一块芯片的优点,它是一种为各种电机类型进行快速和低投入设计全数字、智能驱动器的理想核心处理器。具有如下特点: ?可用于控制5种电机类型:直流有刷/无刷电机、交流永磁同步电机、交流感应电机和步进电机,且易于嵌入到用户的硬件结构中; ?可以选择独立或主从方式工作,并可根据需要,设置成通过网络接口进行多伺服控制器协同工作; ?全数字控制环的实现,包括电流/转矩控制环、速度控制环、位置控制环; ?可实现各种命令结构:开环、转矩、速度、位置或外环控制,步进电机的微步进控制,并可实现控制结构的配置,其中包括交流矢量控制; ?可以配置使用各种运动和保护传感器(位置、速度、电流、转矩、电压、温度等); ?使用各种通讯接口,可以实现RS232/RS485通讯、CAN总线通讯; ?基于Windows95/98/2000/ME/NT/XP平台,强大功能的IPM Motion Studio 高级图形编程调试软件:可通过RS232快速设置,调整各参数与编程运动控制程序。其功能强大的运动语言包括:34种运动模式、判决、函数调用,事件驱动运动控制、中断。因此便于开发和使用。 ?可以通过动态链接库TMLlib,利用VC/VB实现PC机控制;也可以与Labview和PLC无缝连接,通过动态链接库,用户可以在上层开发电机的控制程序,研究控制策略。 运动控制系统设计
伺服电机控制系统
伺服电机控制系统 对于数字化伺服电机控制系统,转矩环的性能直接影响着系统的控制效果,电流采样的精度和实时性很大程度上决定了系统的动、静态性能,精确的电流检测是提高系统控制精度、稳定性和快速性的重要环节,也是实现高性能闭环控制系统的关键。在伺服电机控制系统中,电流检测的方案有多种,常见的一种方案是使用霍耳传感器[1],将电流信号经过电磁转换,变换为直流电压信号输出,然后,通过运放和比较器构成的处理电路处理后,输入到处理器;另一种方案是,取采样电阻两端的电压,经线性光藕或者隔离放大器进行信号隔离,调理后接A/D转换器输入进行数字化,获取电流的采样值,而数字化的过程即可以利用处理器中的A/D转换通道实现[3] [4],也可以利用根据原理实现的模拟量直接转换为数字量的隔离调制芯片来实现[2]。本文通过对这三种方案分别进行电路设计和具体实验后所得结果的比较分析,对三种方案各自的特点有了清晰的认识,这有利于基于不同的条件选择合适的方案来提高伺服控制系统的整体性能。 2 伺服电机控制系统简介
本系统采用交直交电压型变频电路,主电路由整流电路、滤波电路及智能功率模块IPM逆变电路构成,控制部分以DSP 芯片TMS320LF2812为核心,CPLD作为辅助处理模块,构成功能齐全的全数字矢量控制系统,系统结构如图1所示,从图1可以看出,本系统是一个有电流、转速和位置负反馈的三闭环系统, DSP负责采样各相电流,计算电机的转速和位置,最后运用矢量控制算法,得到电压矢量PWM控制信号,经过光藕隔离电路后,驱动逆变器功率开关器件;同时DSP 还监控变频调速系统的运行状态,当系统出现短路、过流、过压、过热等故障时,DSP将封锁SVPWM信号,使电机停机,并通过LED显示。CPLD模块负责对光栅尺反馈的位置信息和上位机发送脉冲形式指令信息进行滤波和计数,并将数据以总线方式传送给DSP;同时处理键盘输入和显示输出,以及开关量的输入输出。 伺服电机控制系统中电流采样的作用就是检测交流同步 电动机的三相定子电流并转换成相应的信号输入到DSP中,再由DSP的AD模块转化成数字量进行处理。因为本文研究的是三相平衡系统Ia+Ib+Ic=0,因此只要检测其中的两路电流,就可以得到三相电流。
伺服电机驱动控制器
目录 一、伺服驱动概述 (1) 二、本产品特性 (2) 三、电路原理图及PCB版图 (4) 四、电路功能模块分析 (4) 五、焊接(附元件清单) (14) 六、编者设计体会 (16)
一.伺服驱动概述 1. 伺服电机的概念 伺服电机是在伺服系统中控制机械元件运转的发动机,作为一种执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出,是一种补助马达间接变速装置。伺服电机是可以连续旋转的电-机械转换器,直流伺服电机的输出转速与输入电压成正比,并能实现正反向速度控制。 2.伺服电机分类 普通直流伺服电动机 直流伺服电机 { 低惯量直流伺服电动机 直流力矩电动机 3. 控制系统对伺服电动机的基本要求 宽广的调速范围 机械特性和调节特性均为线性 无“自转”现象 快速响应 控制功率小、重量轻、体积小等。 4. 直流伺服电机的基本特性 (1)机械特性在输入的电枢电压Ua保持不变时,电机的转速n随电磁转矩M 变化而变化的规律,称直流电机的机械特性 (2)调节特性直流电机在一定的电磁转矩M(或负载转矩)下电机的稳态转速n随电枢的控制电压Ua变化而变化的规律,被称为直流电机的调节特性 (3)动态特性从原来的稳定状态到新的稳定状态,存在一个过渡过程,这就是直流电机的动态特性 5. 直流伺服电机的驱动原理 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm 直流伺服电机分为有刷和无刷电机。有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。无刷直流伺服电机电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护不存在碳刷损耗的情况,效率很高,运行温度低噪音小,电磁辐射很小,长寿命,可用于各种环境
基于单片机的松下A4交流伺服电机控制器设计
北方民族大学学士学位论文论文题目:基于单片机的松下A4交流伺服电机控制器设计 院(部)名称:电气信息工程学院 学生姓名:陈文攀 专业:电子信息工程学号: 20100336 指导教师姓名:王叔洋 论文提交时间: 2014年5月19日 论文答辩时间: 2014年5月25日 学位授予时间: 北方民族大学教务处制
摘要 在当代社会中,电动机是生产工业中不可或缺的机电能量转换装置,应用范围相当广泛,遍及各个领域。无论是在日常生活的家用电器和消费电子产品中,还是在工农业生产、国家安全防护、社会医疗、交通物流和办公设备中,都经常会和电动机打交道,工业地位十分明显。电动机调节速度的控制方法通常采用模拟法,平常的应用产品种,涉及到的电动机控制都比较简单。本文设计内容也主要是对电动机进行简单控制,也就是控制电机的启动与制动、加减速、正向与逆向转动。 本文的工作是模拟仿真一个松下A4系列的交流伺服电机的控制器,用于与松下A4系列交流伺服电机驱动器通信,并进行精确的位移控制、电机的启停、加减速、正向与逆向转动。设计中采用单片机at89c52与PC串行来实现通信的功能,采用的转换电平芯片为MAX232。 设计中采用变频的脉冲来控制电机的速度,精确控制脉冲的个数实现位移控制,单片机的IO口控制电机的启停、读取告警信息等。系统实现了在线调节速度、正向转动、逆向转动、加减速、制动,告警等多种功能,具有一定的实际应用价值。 关键词:伺服电机单片机
ABSTRACT In contemporary society , the motor is an integral part of the production of industrial electromechanical energy conversion device , a wide range of applications , covering various fields. Whether it is in everyday life home appliances and consumer electronics products , or in industrial and agricultural production , national security, social health , transport and logistics and office equipment , and electric motors are often dealing industry position is very clear . Adjust the speed of the motor control method commonly used simulation method , the usual kinds of applications involving motor control are relatively simple. In this paper, the content is mainly designed for simple motor control , motor control is starting and braking , acceleration and deceleration , the forward and reverse rotation . Work of this paper is a simulation Panasonic A4 series AC servo motor controller for communication with the Panasonic A4 series AC servo motor drives and precise shift control, motor start and stop , acceleration and deceleration , the forward and reverse rotation . Design using microcontroller at89c52 with PC serial communications functions to achieve the conversion level chip is MAX232. Pulse frequency used in the design to control the speed of the motor , the number of pulses to achieve precise control of displacement control , microcontroller IO port to control the motor start and stop, read alarm information. Online adjust the speed of the system to achieve a forward rotation , reverse rotation , acceleration, braking , alarm and other functions, has some practical value. Keywords : servo motor microcontroller