多变量广义预测控制及一种简化算法
第32卷第5期
2005年北京化工大学学报
JOURNAL OF BEI J IN G UN IV ERSIT Y OF CHEMICAL TECHNOLO GY
Vol.32,No.5
2005
多变量广义预测控制及一种简化算法
靳其兵 程云娃 董 倩
(北京化工大学信息科学与技术学院,北京 100029)
摘 要:推导了多变量广义预测控制算法,该算法能有效地处理过程的不稳定性和非最小相位特性,并具有良好的解耦性能。同时提出一种处理纯滞后对象的新方法,即将近似法和广义预测控制相结合解决时滞的方案。这种方法可以解决通道之间时滞不同的对象,并且针对广义预测控制算法的复杂性对其简化算法(多变量单值广义预测控制算法)进行了研究。通过仿真研究表明,多变量单值广义预测控制算法在跟踪性、鲁棒性、抗干扰能力等方面都得到很好的控制效果。
关键词:广义预测控制;单值广义预测控制;时滞中图分类号:TP273
收稿日期:2004211208
基金项目:中国石化总公司资助项目(X503014);中国石油天然气集团公司资助项目(03E7042)第一作者:男,1971年生,副教授E 2mail :jinqb @https://www.360docs.net/doc/3f15045590.html,
引言
预测控制作为一种有效的控制算法,已被大量的仿真和实际应用所证实。以前学者们对单变量的
广义预测控制算法(GPC )作了大量的研究,比如:单变量的MAC 、DMC 和GPC 的算法[1],以及将单变量的广义预测控制应用到实际过程。工业过程通常为复杂的多输入多输出(M IMO )过程,近十年来,许多学者对于线性多变量广义预测控制进行了一些研究,并取得了一定的成果。如:关于基本的多变量单值广义预测控制算法的介绍[2],以及关于多变量广义预测控制和其解耦问题[324]。广义预测控制作为一种优化控制算法,其优点之一就是可以直接处理多变量过程的控制问题。
本文结合文献[2,526]推导出一种多变量广义预测控制(M GPC )算法,它特有的隐式解耦功能可以有效地克服传统分散控制、解耦控制的烦琐和缺陷,并根据这个基本的算法提出一种将近似处理时滞的方法纳入广义预测控制的机制,可实现对各个通道的不同滞后时间的处理。由于广义预测控制应用于实际工程时,其算法较复杂,需要调整的参数较多,且在线计算时间较长,增加实际工程应用的复杂度,也不易于满足诸如电气传动这类快速系统的控
制要求。针对这一情况,本文在文献[1,3]的基础上,在性能指标中加入了对控制量的限制,引入控制加权矩阵,推出了一种中间计算参数少、在线计算时间短的多变量单值广义预测控制算法,并与多变量广义预测控制算法进行了比较。
1 算法推导
111 多变量的广义预测控制
设被控对象有m 个输入和n 个输出,用CARI 2MA 模型表述为
A (q -1)y (t )=
B (q -1)u (t -1)+
C (q -1
)ξ(q -1)/D (q -1)(1)这里A (q -1),B (q -1)和C (q -1)分别为n ×n ,n ×
m ,n ×n 维多项式矩阵。y (t ),u (t )和ξ(q -1
)分别为n ×1维输出向量、m ×1维输入向量和n ×1维的零均值白噪声向量。D (q -1)是n ×n 维对角差分矩阵,即D (q -1)=diag {1-q -1}。
考虑下述Diophantine 方程
C ii (q -1)=E ik (q -1)A ii (q -1)(1-q -1)+q
-k
F ik (q
-1
)(2)1=M ik (q -1)C ii (q -1)+q -k N ik (q -1)
(3)
其中,E ik (q -1),F ik (q -1)是由A ii (q -1)和预测时域k 唯一确定的矩阵多项式。M ik (q -1),N ik (q -1)是由C ii (q -1)和预测时域k 唯一确定的多项式。如果过程存在时滞,设第j 个输入到第i 个输出的滞后为d ij ,d i 为第i 行中的最小时滞,则每一项的滞后大小为:d ij -d i ,为了消除滞后,本文将处理纯滞后的近似法引入此控制中,即先将上述离散系统
转化为传递函数形式,然后引入Taylor近似或者Pade近似来进行纯滞后处理。B″(q-1)为进行纯滞后转化后的参数。
令M ik(q-1)E ik(q-1)B″(q-1)=G ij(q-1)+ q-j G pij(q-1) G0(q-1)=M ik(q-1)F ik(q-1)+ N ij(q-1)
则预测输出为
y i(t+k+d i)=G i(q-1)u(t+k-1)+G pi (q-1)Δu(t-1)+G0(q-1)y i(t+d i)(4)令:f i(t+d i)=G pi(q-1)Δu(t-1)+G0 (q-1)y i(t+d i)
性能指标为J=‖y(t+d i)-y r(t+d i)‖2p+‖Δu(t)‖2Q(5)由预测模型(4),可求出使性能指标最优的全部控制增量
Δu
i
=D(y ri-f i)(6)其中,D=(GΤP G+Q)-1GΤP(P,Q为正的加权矩阵)
112 多变量的单值广义预测控制算法
单值预测控制的基本思想是:只用未来某一时刻的预测值y(t+j)来求解当前的控制作用,相当于在广义预测时域大于1而控制时域等于1的情况,因此计算量只是广义预测控制的几分之一,有利于实现实时控制。为简化算法这里假定C(q-1)= I,不加入滞后因子的前提下推导该算法。如上(4)式改写为
y i(t+k)=F p(q-1)Δu(t)+F j(q-1)y i(t)
(7)
单值M GPC的最优预测控制律引入加权二次型性能指标求得
Δu(t)=(F
p
(q-1)+P/(Q3G P,P-1))[y r(t+ p)-F j(q-1)y i(t)](8)将(7)式写成最小二乘形式,通过多变量的递推最小二乘估计在线得到参数F p(q-1)和F j(q-1),然后将所得参数代入(8)式,这样就可得到当前和预测控制量。这种算法不仅可以免去在线递推Dio2 phantine方程的繁琐,而且所用到的参数也仅仅是预测时域的第j步,控制时域也仅取了一步,因此,计算量比广义预测控制有很大的减少。
总结上面的计算过程,归纳为下面几步:
(1)选定有关过程和控制参数n A,n B,n C和j 设置参数辨识初值;
(2)采集过程测量值y(k)和给定值y r(k);
(3)组成观测数据矩阵并用递推最小二乘法辨识式(7)的参数得到F p(q-1),F j(q-1);
(4)组成观测数据矩阵求出预测y i(t+k);
(5)按式(8)计算当前控制作用u(t)并输出;
(6)返回(2)。
2 仿真实例
仿真被控对象的参数如下
A11=1-017319q-1-012518q-2
A22=1-110461q-1+010587q-2
B11=010357+010508q-1
B12=010056+010069q-1
B21=-010096+010001q-1
B22=010371+010228q-1
C11=1-015q-1
C22=1-017q-1
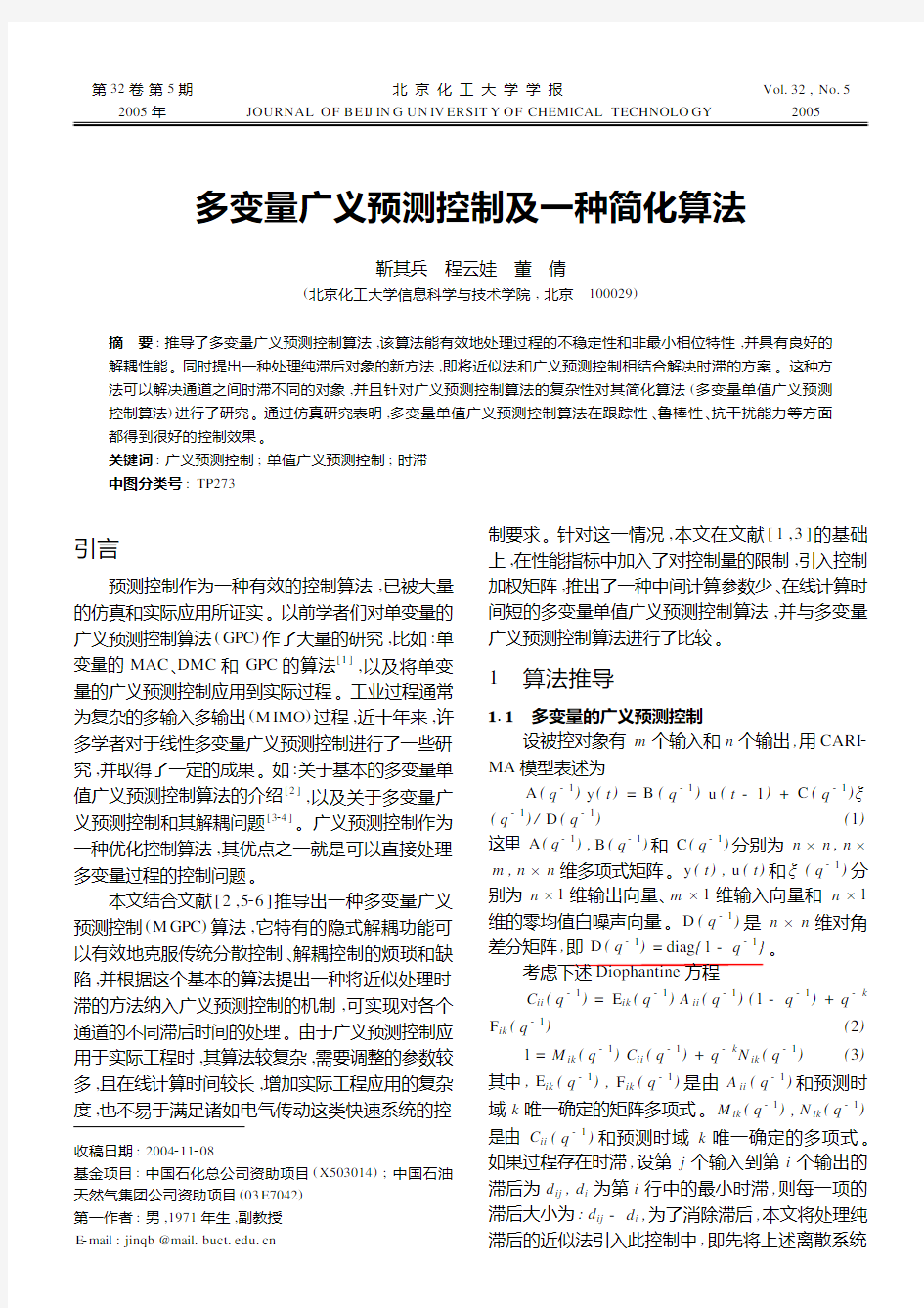
下面分别用多变量广义预测控制和多变量单值广义预测控制对该两输入和两输出的对象进行仿真,设定值y r1和y r2是幅值都为1的方波,u1和u2是输入控制量的变化率,预测加权矩阵和控制加权矩阵都取对角矩阵,大小为011。仿真结果如图1和2所示
。
图1 多变量广义预测控制的仿真结果
Fig.1 Simulation result of multivariable
generalized predictive control
3 结束语
通过对上面两种算法进行仿真可以得出:多变量广义预测控制算法能有效地处理过程的不稳定性和非最小相位特性,并且可实现自动解耦,其控制输
?
3
9
?
第5期 靳其兵等:多变量广义预测控制及一种简化算法
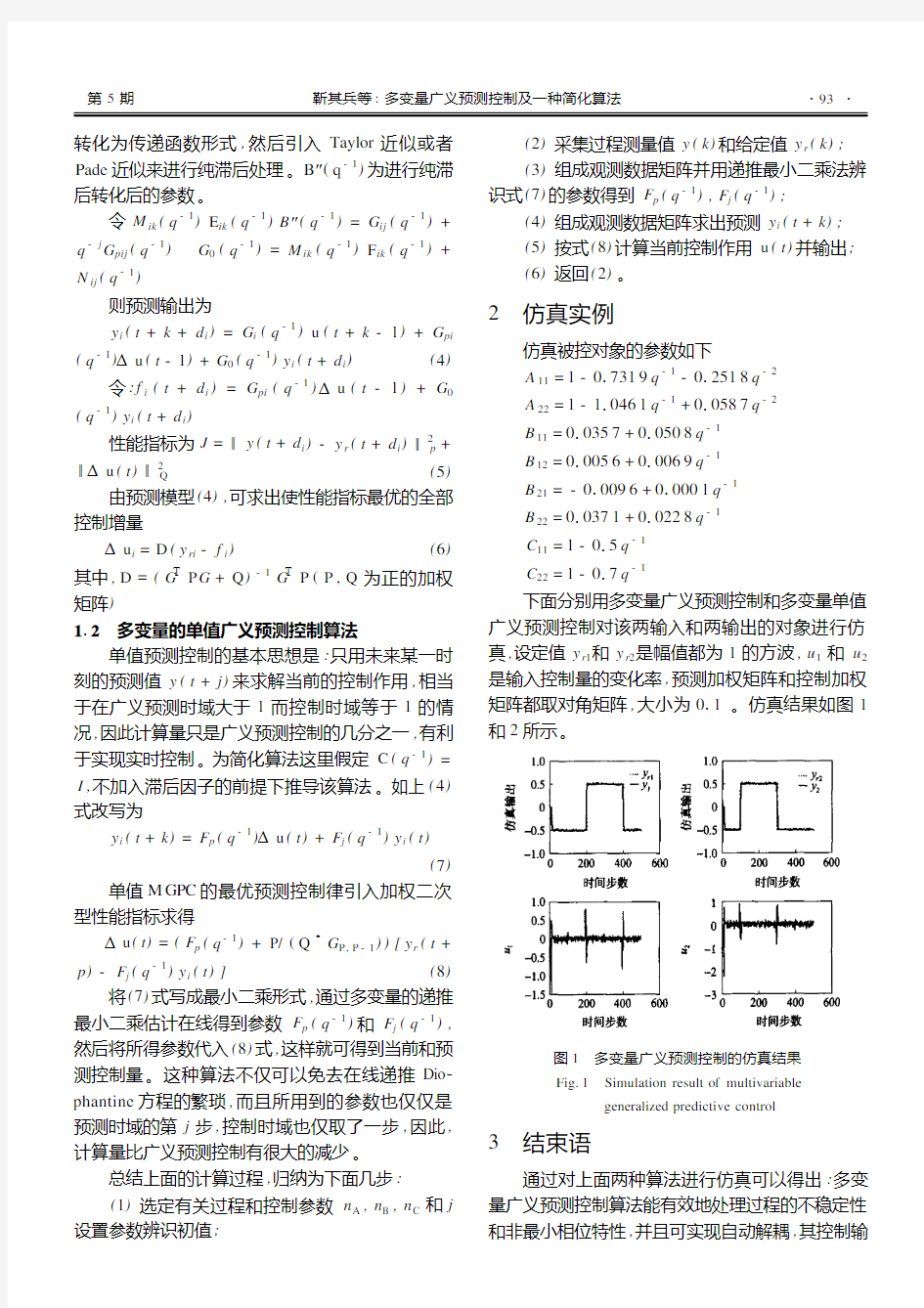
图2 多变量单值广义预测控制的仿真结果
Fig.2 Simulation result of multivariable single
generalized predictive control
出有很好的跟踪性能,而且经过大量仿真研究发现,
它的鲁棒性也非常好,对于不同对象都可得到很好的控制效果。作为其简化算法,多变量单值广义预测控制算法的仿真结果也非常好,从上图可以看出它在跟踪性、鲁棒性、抗干扰性等方面都具有良好的特性,而且该算法由于不必在线计算Diophantine 方程的参数,也不必对矩阵求逆,控制时域相当于只取1,预测时域取j ,所以计算量相比广义预测控制算法大大的减小了。但是由于只预测了一步,而且需
要在线辨识多变量系统的参数,所以控制效果没有
多变量广义预测算法控制的效果好。文章还提出一种新的解决时滞的办法,即将近似处理时滞与广义预测控制处理时滞的办法结合起来。该方法既能处理多变量系统中各通道的滞后时间相同的系统,同时也可以处理通道间滞后时间不同的系统,这对于解决大时滞多变量复杂对象有很大的帮助。
参考文献
[1] 舒迪前.预测控制系统及其应用[M ].北京:机械工业
出版社,1995
[2] 王伟.广义预测控制理论及应用[M ].北京:科学出版
社,1998
[3] 潘立登.先进控制理论与技术[M ].北京:化学工业出
版社,2003
[4] 王东风.多变量系统的广义预测控制解耦设计[J ].电
机与控制学报,2000,12(4):243-246
[5] G ao Jianping ,Rohit.Performance evaluation of two in 2
dustrial MPC controllers [J ].Control Engineering Prac 2tice ,2003(11):1371-1387
[6] Rodrigues J A D ,Toledo E C V.A tuned a pproach of
the predictive 2adaptive GPC controller applied to a fed 2batch bioreactor using complete factorial design[J ].Com 2puters and Chemical Engineering ,2002(26):1493-1500
Multivariable generalized predictive control and a reduced method
J IN Qi 2bing CHEN G Yun 2wa DON G Qian
(College of Information Science and Technology ,Beijing University of Chemical Technology ,Beijing 100029,China )
Abstract :Multivariable generalized predictive control (M GPC )algorithm was deduced in this paper.It can ef 2fectively handle the instability and the non 2minimum phase of the process.Furthermore ,it has good decoupling performance.A new method to handle the pure delay of a process by combining the approximation method with the generalized predictive control was proposed ,and the different time delay could be handled.A reduced method was presented i.e.multivariable single generalized predictive control algorithm to simplify the complexi 2ty of M GPC.Simulation shows that this algorithm achieves a good result in tracing property ,robustness ,anti 2interference etc.
K ey w ords :generalized predictive control ;single generalized predictive control ;time delay
(责任编辑 刘同帅)
?49?北京化工大学学报 2005年
广义预测控制
xx预测控制 (GPC)是一种鲁棒性强、能够有效地克服系统滞后、可应用于开环不稳定非最小相位系统的先进控制算法,但由于它需要Diophantine方程计算、矩阵求逆和最小二乘的递推求解,因此计算量很大,本文针对此缺陷提出四种不基于对象模型且实时性高的广义预测控制快速算法,为广义预测控制应用于实时性要求高的快速系统奠定了理论基础,具体研究工作如下。 (1)对参数未知单输入单输出线性系统提出一种参数自适应直接广义预测控制(DGPC)方法,该方法直接辨识广义预测控制器参数,即基于广义误差估计值对控制器参数和广义误差估计值中的未知向量进行自适应调整。然后利用中值定理将参数未知单输入单输出非线性系统线性化变为时变线性系统,在自适应辨识中对时变参数采用三次样条函数进行逼近,以此将单输入单输出线性系统直接广义预测控制方法推广到单输入单输出非线性系统。最后,将此方法推广到多输入多输出线性系统和非线性系统。 (2)对参数未知单输入单输出线性系统提出一种径向基函数(RBF)网络的直接广义预测控制方法,该方法利用RBF网络来逼近控制增量表达式,直接设计出广义预测控制器,并基于广义误差估计值对控制器参数即网络权值和广义误差估计值中的未知向量进行自适应调整。然后将单输入单输出线性系统RBF网络广义预测控制方法推广到单输入单输出非线性系统。最后,将此方法推广到多输入多输出线性系统和非线性系统。 (3)对参数未知单输入单输出线性系统提出一种模糊自适应的直接广义预测控制方法,该方法利用模糊逻辑来逼近控制增量表达式,直接设计出广义预测控制器,并基于广义误差估计值对控制器参数权值和广义误差估计值中的未知向量进行自适应调整。然后将单输入单输出线性系统模糊自适应广义预测控制方法推广到单输入单输出非线性系统。最后,将此方法推广到多输入多输出线性系统和非线性系统。 (4)提出一种基于灰色模型的多变量广义预测控制算法,该算法所需估计的参数少,而且多步情况下无需求解Diophantine方程,从而使计算量明显减少,极大的提高了实时性。上述四种方法都不需要被控对象数学模型,因此为更好
固定时间域可变采样间隔的统计控制图_张航
文章编号:1002—1566(2002)06—0045—04 固定时间域可变采样间隔的统计控制图Ξ 张 航, 阳宪惠 (清华大学自动化系,北京 100084) 摘 要:本文从提高统计控制图对过程波动检测能力和方便管理的角度出发,对可变采样间隔 (VSI)控制图进行改进,提出了针对连续过程质量控制应用需要的固定时间域可变采样间隔 (VSIFT)控制图。文章详细介绍了VSIFT均值极差控制图、VSIFT EWMA控制图的设计,并分别 评价了它们对过程异常状态的检测能力。 关键词:统计过程控制;统计控制图;异常状态检测;固定时间域可变采样间隔 中图分类号:O213.1文献标识码:A V ariable sampling interval control chart with sampling at f ixed times in continuous process ZHAN G Hang,YAN G Xian2hui (Tsinghua University,Beijing 100084,China) Abstract:This paper expands the Variable Sampling Interval(VSI)control charts and brings forward the Variable Sampling Interval at Fixed Times(VSIFT)control charts,from the perspective of improving the detecting ability on process drift and convenient for management.It describes in detail the design of VSIFT X control charts and the e2 valuation to the detecting ability of VSIFT X control charts to process drift.Then it introduces the designs of VSIFT EWMA control charts,and their abilities of detecting process abnormity. K ey w ords:Statistical process control(SPC);control chart,process drift detecting;variable sampling interval(VSI); variable sampling interval at fixed times(VSIFT) 1、引 言 自休哈特(Shewhart)博士在1931年绘制出世界上第一张控制图以来,统计过程控制SPC (Statistical Process Control)取得了许多重要的研究进展,如各种统计分析方法、多种形式的统计控制图、统计控制图中控制限的计算、多变量统计过程控制等,并得到了广泛应用。对采样频率的研究一直是该领域十分活跃的课题之一,如对固定采样间隔(Fixed Sampling Interval,简称FSI)下采样频率选择的研究,可变采样间隔(Variable Sampling Interval,简称VSI)的研究等。本文作者根据统计质量控制的应用需求,提出将固定时间域可变采样间隔VSIF T (Variable Sampling Interval with Fixed Time)的统计控制图方法应用于连续生产过程,进一步丰富了对控制图采样频率研究的内容,发展了VSIF T控制图的应用。 VSI统计控制图的基本思想是根据当前的样本确定下一次的采样时间,这个时间是可变的。因为采样的时间点不确定,采样所得的样本也无法和诸如班组交班、一个批次的加工时间这样的过程自然时间所对应。从管理的角度而言,这种在采样间隔上的可变性就显得不是那么方便。 本文提出的基于固定时间域可变采样间隔VSIF T对VSI进行了改进,使其更加吻合过Ξ收稿日期:2001-06-21, 修改稿日期:2001-09-10
自适应控制广义预测控制大作业
自适应控制作业 一、题目:受控对象的数学模型为 1p p K x x u T T ? =- + (T 、K 未知) 其中,p x 、u ——系统的状态和控制量 选定参考模型113 3 m m x x r ?=- + ,m x 、r ——参考模型的状态和系统的输 入。 选用模型参考自适应控制方法,求p y 、m y 、前馈增益和反馈增益的 波形。 解: 1、一阶模型参考自适应控制框图: 前馈增益:()0c t 参考模型输出:m y 反馈增益:()0d t 被控对象输出:p y 输出误差:0 p m e y y =- 控制信号:()()()()()00p u t c t r t d t y t =+ 2、一阶自适应控制系统结构图
对象和模型的时域描述如下: 1 ()()()()p p p p p K y a y t k u t y t u t T T ? =-+=- + 11 ()()()() 33 m m m m m y a y t k r t y t r t ? =-+=-+ 选择如下控制规律:()()()()()00p u t c t r t d t y t =+,其中()0c t 和()0d t 是时变反馈增益。闭环系统为 0000()()()()()() [()]()()() p p p p p p p p p p y t a y t k c t r t k d t y t a k d t y t k c t r t ? =-++=--+ 当*001()3m p p k c t c k k == = ,*0031()3p m p p p a a a d t d k k --== = 1()()()()11()()()() 3 3 p p p p p m m m m m K y a y t k u t y t u t T T y a y t y r t y t r t ? ? =-+=- + ==-+=-+ 若取 11/2 25 5/2 p p k s a s s = = +++,那么12 p k = , 52 p a = ,则*01233 p c k = = , * 311333 p p a d k -= = 3、SMULINK 框图
多变量广义预测控制
多变量广义预测控制(MGPC) 实验报告 1.GPC 原理介绍 1.1 预测模型 假设系统基于下面的离散时间CARIMA 模型: )1(/)()1()()()(11?ξk k u z B k Y z A +-=-- 其中,),(),(k u k y 和)(k ξ是系统的m 维输出、p 维输入和m 维噪声向量,并且 a a n n z A z A z A ---+++= 1111)(, b b n n z B z B B z B +++=-- 1101)(, i A 和i B 为m m ?和p m ?阶矩阵。 1.2 目标函数 )2() 1()()|(?1 1 2 2∑∑==-+++-+=N j N j I d u m j k u j k y k j k y J Λ ? 其中)|(?k j k y +是对)(k y 的向前第j 步预测,Λ为半正定阵,通常取),,(1p diag λλΛ =, 0≥i λ。 )}({j k y d +是设定值的柔化序列向量,由下式产生: ?? ?=-+-+=+=) 3(),,1() ()()1()()()(N j k y I j k y j k y k y k y r m d d αα 其中10) ,,(1<≤=i m diag αααα ,???? ? ? ??=m r r r y y k y 1)(为m 维设定值向量。 1.3 控制器求解 引入下面的矩阵丢番图方程组: ) 5(,,1)4(,,1N j H z G B E N j F z A E I j j j j j j j =+==+=--? 其中 )1()1(1)1()0(----+++=j j j z E z E E E , a a n n j j j j z F z F F F --+++=)(1) 1() 0( ,
广义预测控制
广义预测控制(G P C)GPC算法仿真 被控对象模型 动态矩阵控制算法的编程原理 (1)设置GPC参数,例如采样周期,预测时域,控制时域,截断步长等。 (2)建立系统阶跃响应模型 (3)设置初始时刻参数,例如系统的初始时刻值,柔化系数等。 (4)计算参考轨迹 (5)计算控制作用增量 (6)实施GPC控制 (7)输出结果,绘制曲线 GPC算法: 1.初选控制参数:Q、R、P、M、 ysp 、?、?(z-1) 2.采集输入、输出样本{?u(k),?y(k)} 3.用RLS算法估计参数 4.递推求解Diophantine方程,得到 5.计算F(k) 6.在线计算控制器参数d T 7.得到控制增量?u(k)和控制输入u(k) =u(k-1) +?u(k) +1 ?k,进入下一周期预测计算和滚动优化 GPC程序: %Clarke广义预测控制(C=1)(对象参数已知)
%N1=d、N、Nu取不同的值 clear all;close all; a=cell(1,2) ;b=cell(1,2) ;c=cell(1,1);d=cell(1,1);%对象参数syms k; k=length(k); if (0<=k<=150) a=[1 ]; b=[ ]; c=1; d=1; elseif (150 多元统计过程控制图表概述 1:介绍 在一份讨论文件,伍德尔和Montgomery1指出,多变量过程控制统计过程控制的发展最为迅速的领域之一,他们还强调,有必要审查文件,因为这些文件往往会引发新的研究思路,这个启发,我们提出了文献回顾多元过程控制图技术如今,在行业中,有许多情况,其中同时监测两个或多个相关的质量过程特性或控制是必要的。监视这些质量特性独立是非常误导的。问题在哪几个相关变量的影响过程监控统称为多变量统计过程控制。多变量统计过程控制的最有用的工具是质量控制图。 多变量过程控制技术是由霍特林在1947年他的开创性论文建立。Hotelling2应用多变量过程控制方法,以一个bombsights问题。 Jackson3表示,任何多变量过程控制程序应满足四个条件:(1)一个问题的答案“?是过程控制”必须是可用的; (2)该事件的总概率“诊断程序失控的错误状态'必须指定; (3)之间的变量 - 属性关系,应考虑在内;和(4)的答案“如果过程失控,是什么问题?”应该可用 本文是最近的事态发展在多元统计过程控制领域,使用控制图表,特别是扩展的文献回顾的结果。在第2节的多元休哈特型控制图的基本理论给出。第3节介绍了最显著的多变量累积和(CUSUM) - 和指数加权移动平均(EWMA)型控制图。在多变量统计过程控制领域使用主成分分析(PCA)和偏最小二乘(PLS),提出在第4节,而在第5节,发展就失去控制的信号的解释中给出。最后,一些结论性意见是在第6节课程。 2。多元休哈特控制图 在文献中,控制图表实践两个不同的阶段进行了讨论(Woodall4)。 第一阶段:图表是用于追溯测试过程是否在控制的时候,正在绘制的第一个亚组。在这个阶段,图表作为辅助的从业者,在使一个进程进入一个状态,它是统计学上的控制。这一步完成后,控制图是用来定义什么是一个过程是在统计控制的意思。这被称为追溯运用控制图。在一般情况下,有更大量的事情在这个阶段不是简单图表的一些数据。在这个阶段,医生正在研究过程中非常密集。在此阶段收集到的数据,然后在试图回答这个问题分析“是从一个在控制过程?收集这些数据”。据Duncan5,一期还包括建立过程是在统计控制。 第二阶段:控制图用于测试的过程中是否保持在控制权时,未来分组绘制。在这个阶段中,图被用作助医生在监视过程,用于从在控制状态的任何变化。在每个采样阶段,医生会询问的问题“已经改变了进程的状态?”。在这个阶段中,从业者正在监视过程不管这个过程中,μ0和0的参数是否是已知的或估计的。 药分分析方法缩略语集合 中文英文缩略语过程分析技术process analytical technology PAT 质量控制quality control QC 质量保证quality assurance QA 固相萃取技术solid-phase extraction SPE 固相微萃取技术solid-phase microextraction technique SPME 湍流色谱技术turbulent flow chromatography TFC 膜萃取技术membrane extraction techniques METs 微透析技术microdialysis MD 超临界流体萃取supercritical fluid extraction SFE 红外分光光度法infrared spectrometry IR 薄层色谱法thin-layer chromatography TLC 高效液相色谱法high performance liquid chromatography HPLC 气相色谱法gas chromatography GC 原料药active pharmaceutical ingredient API 热重分析法thermogravimetric analysis TGA 差热分析differential thermal analysis DTA 差示扫描量热法differential scanning calorimetry DSC 原子吸收分光光度法atomic absorption spectrophotometry AAS 近红外分光光度法near infrared spectrometry NIR 酶联免疫吸附测定enzyme-linked immunosorbent assay ELLSA 广义预测控制(GPC)是一种鲁棒性强、能够有效地克服系统滞后、可应用于开环不稳定非最小相位系统的先进控制算法,但由于它需要Diophantine方程计算、矩阵求逆和最小二乘的递推求解,因此计算量很大,本文针对此缺陷提出四种不基于对象模型且实时性高的广义预测控制快速算法,为广义预测控制应用于实时性要求高的快速系统奠定了理论基础,具体研究工作如下。(1)对参数未知单输入单输出线性系统提出一种参数自适应直接广义预测控制(DGPC)方法,该方法直接辨识广义预测控制器参数,即基于广义误差估计值对控制器参数和广义误差估计值中的未知向量进行自适应调整。然后利用中值定理将参数未知单输入单输出非线性系统线性化变为时变线性系统,在自适应辨识中对时变参数采用三次样条函数进行逼近,以此将单输入单输出线性系统直接广义预测控制方法推广到单输入单输出非线性系统。最后,将此方法推广到多输入多输出线性系统和非线性系统。(2)对参数未知单输入单输出线性系统提出一种径向基函数(RBF)网络的直接广义预测控制方法,该方法利用RBF网络来逼近控制增量表达式,直接设计出广义预测控制器,并基于广义误差估计值对控制器参数即网络权值和广义误差估计值中的未知向量进行自适应调整。然后将单输入单输出线性系统RBF网络广义预测控制方法推广到单输入单输出非线性系统。最后,将此方法推广到多输入多输出线性系统和非线性系统。(3)对参数未知单输入单输出线性系统提出一种模糊自适应的直接广义预测控制方法,该方法利用模糊逻辑来逼近控制增量表达式,直接设计出广义预测控制器,并基于广义误差估计值对控制器参数权值和广义误差估计值中的未知向量进行自适应调整。然后将单输入单输出线性系统模糊自适应广义预测控制方法推广到单输入单输出非线性系统。最后,将此方法推广到多输入多输出线性系统和非线性系统。(4)提出一种基于灰色模型的多变量广义预测控制算法,该算法所需估计的参数少,而且多步情况下无需求解Diophantine方程,从而使计算量明显减少,极大的提高了实时性。上述四种方法都不需要被控对象数学模型,因此为更好地解决含参数不确定性对象的广义预测控制问题提供了一种新思路,同时避免了Diophantine方程的在线求解及矩阵求逆。 广义预测控制需要实现四个功能:1、参数估计,可以用递推最小二乘法实现; 2、使用丢番图方程对模型分解,分解为当前状态和历史输入对模型未来输出值的作用公式,未来输入对模型未来输出值的作用公式;推导过程过于繁琐,可以直接套用公式计算。 3、参考轨迹生成,可以使用下面公式递推得到:r(n)=(1-k)*y(n-1)+k*(s-y(n-1)),其中k为时间常量,决定系统的调节速度,s为设定值。 4、最优值计算,可以直接套用公式。实现过程:首先辨识系统模型,然后使用丢番图方程对辨识得到的模型进行分解,计算参考轨迹,最后把参考估计和分解后的系统模型带入公式得到最优输出值(其实是次优解),如此反复即可实现预测控制。 经典PID计算:可以使用增量式的公式: y(n)=y(n-1)+Kp*[e(n)-e(n-1)]+Ki*e(n)+Kd*[e(n)+e(n-2)-2*e(n-1)] 需要说明广义预测控制和PID控制输出都需要设置输出值限幅。 工业实现:可以用c语言编写程序作为控制软件的控制代码,硬件平台可以是一台工控机或者PLC,另外也有这方面的软件包,不过很贵。 广义预测控制(GPC) GPC算法仿真 被控对象模型 动态矩阵控制算法的编程原理 (1)设置GPC参数,例如采样周期,预测时域,控制时域,截断步长等。 (2)建立系统阶跃响应模型 (3)设置初始时刻参数,例如系统的初始时刻值,柔化系数等。 (4)计算参考轨迹 (5)计算控制作用增量 (6)实施GPC控制 (7)输出结果,绘制曲线 GPC算法: 1.初选控制参数:Q、R、P、M、 ysp 、α、?(z-1) 2.采集输入、输出样本{?u(k),?y(k)} 3.用RLS算法估计参数 4.递推求解Diophantine方程,得到 5.计算F(k) 6.在线计算控制器参数d T 7.得到控制增量?u(k)和控制输入u(k) =u(k-1) +?u(k) 8.k+1 →k,进入下一周期预测计算和滚动优化 GPC程序: %Clarke广义预测控制(C=1)(对象参数已知) %N1=d、N、Nu取不同的值 clear all;close all; a=cell(1,2) ;b=cell(1,2) ;c=cell(1,1);d=cell(1,1);%对象参数syms k; k=length(k); if (0<=k<=150) a=[1 0.9234]; b=[7.2402 0.9485]; c=1; d=1; elseif (150 a=[1 0.8981]; b=[9.9901 0.14142]; c=1; d=1; elseif (300 《现代控制理论》实验报告 学校:西安邮电大学 班级:自动1101 姓名:(31) 学号:06111031 实验二 多变量系统的可控性、可观测性 和稳定性分析 一、实验目的 1. 学习多变量系统状态可控性及稳定性分析的定义及判别方法; 2. 学习多变量系统状态可观测性及稳定性分析的定义及判别方法; 3. 通过用MATLAB 编程、上机调试,掌握多变量系统可控性及稳定性判别方法。 二、实验要求 1.掌握系统的可控性分析方法。 2.掌握可观测性分析方法。 3.掌握稳定性分析方法。 三、实验设备 1.计算机1台 2.软件1套。 四、实验原理说明 1. 设系统的状态空间表达式 q p n R y R u R x D Cx y Bu Ax x ∈∈∈???+=+= (2-1) 系统的可控性分析是多变量系统设计的基础,包括可控性的定义和可控性的判别。 系统状态可控性的定义的核心是:对于线性连续定常系统(2-1),若存在一个分段连续的输入函数U (t ),在有限的时间(t 1-t 0)内,能把任一给定的初态x (t 0)转移至预期的终端x (t 1),则称此状态是可控的。若系统所有的状态都是可控的,则称该系统是状态完全可控的。 2. 系统输出可控性是指输入函数U (t )加入到系统,在有限的时间(t1-t0)内,能把任一给 定的初态x (t0)转移至预期的终态输出y (t1)。 可控性判别分为状态可控性判别和输出可控性判别。 状态可控性分为一般判别和直接判别法,后者是针对系统的系数阵A 是对角标准形或约当标准形的系统,状态可控性判别时不用计算,应用公式直接判断,是一种直接简易法;前者状态可控性分为一般判别是应用最广泛的一种判别法。 输出可控性判别式为: 广义预测控制理论 1 引言 预测控制思想主要是在70年代形成的,进人80年代后,随着模型算法控制(MAC)的问世,相继出现了动态矩阵控制(DMC)、扩展时域预测自适应控制(EPSAC)等结构各异的预测控制算法,这些算法分别基于有限脉冲响应和有限阶跃响应模型,算法简单,容易实现,1984年,Clarke 及其合作者在上述算法的基础上,提出了广义预测控制(GPC )思想及基本方法,GPC 基于参数模型,引入了不相等的预测水平和控制水平,使系统设计更灵活。由于广义预测控制具有预测模型、滚动优化和反馈校正三个基本特征,因而具有优良的控制性能和鲁棒性,被认为是具有代表性的预测控制算法之一并被广泛应用于过程工业中。近年来,广义预测控制吸引了众多学者对其进行研究国际上,各大控制会议和杂志对它也非常关注,近10年来的美国控制会议(ACC)、IEEE 决策与控制会议(CDC)和国际自动控制联合会(IFAC)世界大会几乎每年都有关于预侧控制的专题分组及以预侧控制为主题的工作讨论会,1995年在韩国又召开了关于预测控制的国际讨论会,在广义预测控制方面也发表了不少综述文献和著作。 2 广义预测控制 2.1 广义预测控制的基本算法 GPC 采用如下CARIMA 模型来描述系统 ?+-=---/)()z ()1()z ()()z (111t C t u B t y A ξ )1.1.2( 其中)z (),()(111---C z B z A ,分别是阶数位的c b a n n ,,n 的1z -的多项式, )z (1-A 和 )z (1-C 是首一多项式,}t {)}({)}({u )(,,ξt y t 分别表示系统的输入、输出和白噪声序列,1 z 1--=?。广义预测控制使用如下的二次目标函数 })]1([)]()([{12k 2 21∑∑==-+?++-+=M N k N N k t u k t k t y E J λω )2.1.2( 其中,21,N N 分别为最小、最大预测长度,M N 为控制长度,满足关系221,1N N N N M ≤<≤且当k>2N 时看,假定0)1(=-+?k t u ,λ为控制加权序列, 统计过程控制,诊断和调整 一引言 (2) 二统计过程控制(SPC) (3) 1 什么是SPC (3) 2 SPC发展简史 (4) 三控制图 (5) 1 什么是控制图 (5) 2 控制图原理 (5) 4.控制图是如何贯彻预防原则的 (7) 5.控制图的分类 (8) 6 .控制图的演化与发展 (10) T控制图 (14) 四二元自相关过程的残差2 1 2T统计量和2T控制图 (14) 2. 残差2T控制图 (15) 3 .残差2T控制图的控制效果 (17) 4 残差2T控制图的适用范围………………………. .19 5 .结论 (20) 五.SPC的未来发展方向为SPD (21) 六.SPA理论的发展 (24) 七.结语 (24) 一引言 我们知道,任何制造产品总是经过设计、制造与检验,才能将合格的产品提供给使用者。根据传统事后质量检验方法,总是通过抽样检验各工序结束后的产品或最终制品,从而发现设计与加工过程中的问题,然后再反馈给相关部门进行改进。然而这时不合格产品已经生产出来,造成了一定的损失。为了避免这种损失,一个比较好的措施就是进行预防。问题主要在于如何及时发现问题。假定在生产加工过程的每一道工序都建立了一个简单易行的控制系统,一旦出现质量问题就能及时发现、及时纠正,不使不合格的半成品流入下一道工序,这样就可以避免出现大量的不合格品,从而达到预防的目的。 统计过程控制(SPC)是就是这样一个控制系统,它是一种借助数理统计方法的过程控制工具,它对产品的生产过程进行分析评价,根据反馈信息及时发现工序偶然性因素出现的征兆,并采取措施消除其影响,使过程维持在仅受随机性因素影响的受控状态,以达到控制质量的目的。在产品的生产过程中,当仅受随机因素影响时,过程处于统计控制状态(简称受控状态);当存在偶然因素的影响时,过程处于统计失控状态(简称失控状态)。由于生产过程波动具有统计规律性,当生产过程受控时,过程特性一般服从稳定的随机分布;而失控时,过程分布将发生改变。SPC正是利用这一统计规律性对生产过程进行分析控制的。 1.1 引言 预测控制是一种基于模型的先进控制技术,它不是某一种统一理论的产物,而是源于工业实践,最大限度地结合了工业实际地要求,并且在实际中取得了许多成功应用的一类新型的计算机控制算法。由于它采用的是多步测试、滚动优化和反馈校正等控制策略,因而控制效果好,适用于控制不易建立精确数字模型且比较复杂的工业生产过程,所以它一出现就受到国内外工程界的重视,并已在石油、化工、电力、冶金、机械等工业部门的控制系统得到了成功的应用。工业生产的过程是复杂的,我们建立起来的模型也是不完善的。就是理论非常复杂的现代控制理论,其控制的效果也往往不尽人意,甚至在某些方面还不及传统的PID控制。70年代,人们除了加强对生产过程的建模、系统辨识、自适应控制等方面的研究外,开始打破传统的控制思想的观念,试图面向工业开发出一种对各种模型要求低、在线计算方便、控制综合效果好的新型算法。这样的背景下,预测控制的一种,也就是模型算法控制(MAC -Model Algorithmic Control)首先在法国的工业控制中得到应用。同时,计算机技术的发展也为算法的实现提供了物质基础。现在比较流行的算法包括有:模型算法控制(MAC)、动态矩阵控制(DMC )、广义预测控制(GPC)、广义预测极点(GPP)控制、内模控制(IMC)、推理控制(IC)等等。随着现代计算机技术的不断发展,人们希望有一个方便使用的软件包来代替复杂的理论分析和数学运算,而Matlab、C、C++等语言很好的满足了我们的要求。 1.2 预测控制的存在问题及发展前景 70年代以来,人们从工业过程的特点出发,寻找对模型精度要求不高,而同样能实现高质量控制性能的方法,以克服理论与应用之间的不协调。预测控制就是在这种背景下发展起来的一种新型控制算法。它最初由Richalet和Cutler等人提出了建立在脉冲响应基础上的模型预测启发控制(Model Predictive Heuristic Control,简称“MPHC”),或称模型算法控制(Model Algorithmic Control,简称“MAC”);Cutler等人提出了建立在阶跃响应基础上的动态矩阵控制(Dynamic Matrix Control,简称“DMC”),是以被控系统的输出时域响应(单位阶跃响应或单位冲激响应)为模型,控制律基于系统输出预测,控制系统性能有较强的鲁棒性,并且方法原理直观简单、易于计算机实现。它的产生并不是理论发展的需要,而是在工业实践过程中独立发展起来,即实践超前于理论它一经问世就在石油、电力和航空等领域中得到十分成功的应用。之后,又延伸到网络、冶金、轻工、机械等部门或系统。80年代初期,人们为了增强自适应控制系统的鲁棒性,在广义最小方差控制的基础上,吸取预测控制中的多步预测、滚动优化思想,以扩大反映过程未来变化趋势的动态信息量,提高自适应控制系统的实用性。这样就出现了便于辨识过程参数模型、带自校正机制、在线修改模型参数的预测控制算法,主要有Clarke等提出的广义预测控制(GPC) Do Keyser的扩展时域预测自适应控制(EPSAC),广义预测极点配置控制(GPP)。Brosilow于1978年提出推理机制(1C), Garcia. Norari 于1982年提出内部模型控制(简称内模控制,IMC ),从模型结构的角度对预测控制作了更深入的研究,分析出预测控制具有内模控制的结构。应用内模控制结构来分析预测控制系统,有利于理解预测控制的运行机理,分析预测控制系统的闭环动静态特性、稳定性和鲁棒性,找出各类预测控制算法的内在联系,导出它们的统一格式,有力推动了预测控制在算法研究、稳定性鲁棒性的理论分析和应用研究上的发展。但实际上,预测控制的理论还是落后于其实际应用的,因此在理论和应用方面,仍需得到进一步的研究和发展。 1.2.1 预测控制存在的问题就目前的研究现状来看,预测控制的研究中主要存在一下问题:(1) 理论分析难以深入。目前的许多理论分析工作都是针对广义预测控制算法进行的。其分析方法与一般的自适应控制的方法类似,都是把主要精力放在寻找一种在线估计方法,然后与预测控制策略相结合,得到的分析结果也与一般的自适应算法结果相似,完全看不出预测控制的特点。所以,要得到对预测控制深入的理论分析结果,首先必须摆脱自适应控制的束缚,针对预测控制本身的机理特点,寻找新的分析方法。另外,对多变量预测控制算法 杭州电子科技大学信息工程院毕业设计(论文)开题报告 题目多变量解耦预测算法研究 学院信息工程学院 专业自动化 姓名蔡东东 班级08092811 学号08928106 指导教师左燕 一、综述本课题国内外研究动态,说明选题的依据和意义 预测控制是源于工业过程控制的一类新型计算机控制算法。7 0年代后期,它已应用于美法等国的工业过程控制领域中。1978 年,理查勒特( Rchalet )等在文献【l】中首次详细阐述了这类算法产生的动因、机理及其在工业过程中的应用效果,从此,预测控制(P r e d i c t i v eC ont r o l )作为一种新型的计算机控制算法的统一名称,便开始出现在控制领域中。 预测控制算法的研究现状 1 鲁捧性问题 预测控制作为一种复杂系统的控制策略和方法,有着强烈的应用背景,它所具有的强鲁棒性已为大量的系统仿真和工业实践所证实。当对象参数未知时,通常采用参数自适应算法来估计对象参数,根据确定性等价原理,建立间接式的自适应广义预测控制。然而,当被控对象具有未建模动态、参数时变、非线性及有界干扰时,这样建立的自适应算法未必能使广义预测控制的强鲁棒性得到保持。为此,不少学者从不同的立足点出发,开展了提高算法鲁棒性的研究。 由于实际的生产过程大多是复杂的动态过程,精确建模具有特殊的困难,因而,描述对象的数学模型与实际对象特性之间不可避免地存在模型误差。尽管模型误差无法预知,但根据它的历史数据,仍有可能用某些方法对未来时刻的模型失配作出某种预报,由此提高输出预测的精度、改善算法的鲁棒性。文献【3】利用预测误差的历史数据建立误差预测模型,通过误差预测修正输出预测。文献【4】则是将人工智能方法引入预测控制,在对实际运行经验总结的基础上,选择对系统输出有重要影响却难以归并到数学模型中的状态特征作为特征量,由此建立系统状态特征与预测误差之间的定量或定性映射关系,实现对预测误差的智能补偿。 从反馈校正的实施方式出发,针对预测控制单一输出反馈的局限性,文献【5】通过分析过程的中间信息,综合利用模型预测和误差预测,针对工业串联系统提出一种多反馈的预测控制结构,及时地抑制了扰动和模型失配的影响,提高了系统的鲁棒性和抗干扰性。 此外,鉴于预测控制每一采样时刻只计算实施一个现时控制量,没有充分利用全部预测控制信号的作用,致使现时控制信号发生错误时系统性能将变差。为此,文献【6】采用加权控制律计算现时控制量,对因错误测量信号、暂时未建模动态、系统结构突变、参数估计失误及噪声影响等原因造成的错误控制信号进行有效抑制。 2 非线性系统的预测控制 非线性系统的控制一直是控制理论界的难点.对慢时变、弱非线性系统而言,基于线性动态模型的预测控制算法可取得较好的控制效果。然而,当其应用于强非线性系统时,为确保系统的鲁棒性,往往需要建立高阶线性近似模型或分段线性模型,这无疑会增加算法的复杂性。一个可行的方法是引入简单的、可辨识的非线性数学模型。例如采用Hammerstein模型作为预测模型,可实现对具有幂函数、死区、开关等非线性特性的工业过程的预测控制和采用广义卷积模型描述齐次非线性系统的输入输出关系,由此替代模型算法控制中的脉冲响应模型可获得齐次非线性系统的模型算法控制,进而可推广到更为一般的V ottera非线性系统的控制。 20l0年7月第17卷第4期 控制工程 ControlEnginee而ngofChina Jul.2O10 V01.17.No.4 文章编号:1671-7848(2010)04.0452科 融合闭环反馈机理的多变量预测控制策略 章苗根1,盖俊荣2,邹涛2,赵东亚3 (1.浙江省机械设备成套局,浙江杭州310006;2.浙江工业大学信息_[程学院,浙江杭州310023; 3.中国石油大学(华东)机电学院,山东东营257061) 摘要:针对在模型预测控制中模型失配较严重时,单独使用动态矩阵控制不能满足控 制需要的问题,提出了融合闭环反馈机理的多变量预测控制策略。讨论了多输入多输出系统 中输入和输出的配对问题,以及控制算法中的PID控制强度问题,在动态矩阵控制的基础上 引入PID反馈,利用动态矩阵控制算法的鲁棒性强及PID控制算法抗干扰性能好的优点,极 大地弥补了模型失配的影响。通过对一个经典两输入两输出控制问题的仿真,表明该控制策 略具有明显优于单独的DMC控制的性能。 关键词:动态矩阵控制;反馈控制;PID 中图分类号:TP27文献标识码:A MultiVariablePredictiveControlStrategyBasedon IntegrationofClosed—loopFeedback ZHANGMic∞一genl,GAIjun—ronf。zoUT叻z,zHAoDong一妒 (1.Zhejia“gMechanicajEquipmentBureau。Zhejiang310006,China; 2.coIIegeoffnfo邢ationEn崩nee“ng,zheJiang universityofTbrhnoJof;y,zhPjiarIg310023,China; 3.CoUegeofMechanicaIandElec呐nicEngineering,ChinaUniversityofPetmleum,D【,“科ing25706l,Chim) Abstract:Tbthepmblem0ftheunsatisf如toryconⅡDlrelquireⅡ七ntwhenthedynaIllic眦t而xcomml(DMC)ismerelyusedinthecaseoftheseriousmodel111ismatchinmodelp耐ictiVe咖州,amIlltiv蕊ablepredictivecontmlstrate纠basedonintegrationofclosed—100lpfbdbackispmpos蒯.r11le眦tchingproblem《theinputaJld叫tputisdiscussedforr11ulti—inputmulti-outputsyste鹏.11lePlDcontrols№Ilg【hintIle contmlalgo甜哪isanaJyzed.111ePID‰dbackisineorpomtedbased0ntheDMC.Usillgthes咖ngmbustnessoftheDMC觚d900d肌ti—j鲫|111ingpe面玎咖ce0ftllePIDa190ri岫,thein耳)actofrmdel111isH“chisgreatly珊幽.Acl舾sicaltwo-inputtwo-outputc叽trolpmblemissimulated.ThesimulationresultshowsthatthecontmlstmtegyisⅡmchbetterthant|lepe—’0nnallceofindividualDMCcontml. Keywords:dynamic啪trixcontrol;feedbackcontrol;PID l引言 工业对象通常是多输入、多输出的复杂关联系统,具有非线性、时变性、强耦合与不确定性等特点,因此,建模时难以得到精确的数学模型。针对理论发展和实际应用之间的不协调,20世纪70年代中期在美、法等国的工业过程控制领域内,出现了一类新型计算机控制算法一模型预测控制。其中的动态矩阵控制(DMC)由于具有易于建模、鲁棒性强的显著优点,更是在工业生产中得到广泛应用。该算法以对象的阶跃响应或脉冲响应直接作为模型,采用动态预测、滚动优化的策略,具有易于建模、鲁棒性强的显著优点。从而有效地抑制了算法对于模型参数变化的灵敏性¨圳。然而,如果模型失配超出一定范围,仅仅通过DMC控制往往无法取得令人满意的控制效果。 针对以上不足,本文在DMC控制的基础上,引入了PID控制进行补偿。通过给与被控量配对的控制量引入PID反馈来克服模型失配的影响,从而让系统达到稳定。 2多变量动态矩阵控制(DMC) DMC算法是一种基于对象阶跃响应系数模型的控制方法L5J。根据预测控制的基本原理,其预测过程可直接由单变量情形推广到多变量情形。为此,考虑在输入Mi作用下且只有一个增量△“,(I|})时,竹在未来Ⅳ个时刻的输出预测值: j,。.M(后)=奠,肿(|j})+nu△ui(I|})(1)羹朋(I|})=[Z.。(后+1I||})…Z.。(后+ⅣlJ|})]7 收稿日期:2010旬3-20:收修定稿日期:2010旬5JD7 基金项目:国家863计划资助项日(2(x,9AA042138);国家自然科学基金资助项目(60604017,60904040.60774021) 作者简介:章苗根(1963?),男,浙江渚暨人,高级工程师,主要从事f业过程控制与综合自动化等方面的工作。万方数据 %% 清空环境变量 clc clear %% 网络结构初始化 rate1=0.006;rate2=0.001; %学习率 k=0.3;K=3; y_1=zeros(3,1);y_2=y_1;y_3=y_2; %输出值 u_1=zeros(3,1);u_2=u_1;u_3=u_2; %控制率 h1i=zeros(3,1);h1i_1=h1i; %第一个控制量 h2i=zeros(3,1);h2i_1=h2i; %第二个控制量 h3i=zeros(3,1);h3i_1=h3i; %第三个空置量 x1i=zeros(3,1);x2i=x1i;x3i=x2i;x1i_1=x1i;x2i_1=x2i;x3i_1=x3i; %隐含层输出 %权值初始化 k0=0.03; %第一层权值 w11=k0*rand(3,2); w12=k0*rand(3,2); w13=k0*rand(3,2); %第二层权值 w21=k0*rand(1,9); w22=k0*rand(1,9); w23=k0*rand(1,9); %值限定 ynmax=1;ynmin=-1; %系统输出值限定 xpmax=1;xpmin=-1; %P节点输出限定 qimax=1;qimin=-1; %I节点输出限定 qdmax=1;qdmin=-1; %D节点输出限定 uhmax=1;uhmin=-1; %输出结果限定 %% 网络迭代优化 for k=1:1:200 %% 控制量输出计算 %--------------------------------网络前向计算-------------------------- %系统输出 y1(k)=(0.4*y_1(1)+u_1(1)/(1+u_1(1)^2)+0.2*u_1(1)^3+0.5*u_1(2))+0.3*y_1(2); y2(k)=(0.2*y_1(2)+u_1(2)/(1+u_1(2)^2)+0.4*u_1(2)^3+0.2*u_1(1))+0.3*y_1(3); y3(k)=(0.3*y_1(3)+u_1(3)/(1+u_1(3)^2)+0.4*u_1(3)^3+0.4*u_1(2))+0.3*y_1(1);外文翻译(李斌)
完全 药分分析方法缩略语集合
广义预测控制
广义预测控制 GPC
多变量系统的可控性、可观测性和稳定性分析
广义预测控制原理-江苏科技大学
关于统计过程控制_诊断和调整完整版
预测控制
预测控制 开题报告
融合闭环反馈机理的多变量预测控制策略
PID神经元网络解耦控制算法_多变量系统控制