新型全自动抓斗卸船系统
800t桥式抓斗卸船机技术规格书
目录 1、总则 2、投标项目名称及内容 3、使用地点、使用概况 4、卸船机主要技术参数 5、作业现场的设计条件和自然条件 6、标准和规范 7、卸船机工作级别、整体稳定性 8、材料工艺 9、主机架金属结构件 10、机构 11、润滑 12、材料预处理及涂装油漆技术 13、电气设备 14、广播、通讯、监控、消防 15、司机室 16、现场操作设备 17、外购配套件和外协件 18、供货范围(附设备、工具、各件清单) 19、主要机电配套件厂商 20、设计交底和交货时资料的交付 21、设备的监理 22、安全生产 23、设备的安装调试(详细描述请见安装施工组织设计书) 24、设备验收:人员培训、备品备件、质保期
概述 投标方完全按照本技术规范书的要求为业主方提供2台绳索牵引桥式卸船机, 卸船机为四卷筒差动小车型式的桥式抓斗卸船机,可沿码头固定的轨道运行,用于5000~10000DWT吨级散货船的红土镍矿炭接卸作业。 卸船机由抓斗从船上抓取物料卸至卸船机漏斗给汽车,卸船设计额定起重量为20吨,额定卸载红土镍矿炭能力为800t/h。 卸船机动力电源由地面高压接线箱提供,供电电源为10KV、3相50HZ,经接线箱、卸船机电缆卷筒送至主开关柜分别输送给主变压器和辅助变压器,再进入设在机房内的主驱动和辅助开关柜。 主要机构:抓斗支持(起升和下降)和开闭、小车(牵引)驱动机构的减速器为四卷筒差动形式,安装在机房内。 起升、开闭、小车牵引可单独或联动动作,为确保卸船机的安全可靠的工作,各机构均安装各种安全和保护装置。 在卸船机江侧处,安装散料回收挡板,用于将洒落的物料回流到船舱,减少货损和污染。 夹轨器、锚定装置和防风系缆装置可保证在任何情况下卸船机的稳定,应保证风速在20米/秒以下设备可正常作业,25米/秒时大车可逆风行进到锚定位置,35米/秒风速时,在夹轮器锚定装置,防风系缆装置作业下,卸船机保持稳定状态。 卸船机采用先进的控制技术,同时还应配有自动化辅助控制系统和通讯网络系统,使卸船机在卸船作业时安全靠泊。自动化程度高,与码头中央控制室有控制联锁信号。 对800t/h卸船机的设计、制造应充分考虑整机的稳定性和轮压限制条件,最大限度地提高卸船机的装卸范围。 本机供电方式为码头陆侧供电,并在机下布置有皮带机系统,应充分考虑本机吊装清仓机械的便捷方式和安全。 1.总则 1.1它提出了设备的功能、性能、结构等设计、制造安装和试验等方面的技术要求。 1.2 本投标技术规格书中提出的是最低限度的技术要求,并未对所有的技术细节
自动配料系统的比较
几种常用自动配料系统的比较与改进 济钢集团总公司计量管理处王庆河邵亚男 摘要:本文对现代自动配料系统进行了概述,并对不同的系统结构、计量仪表等进行了介绍与比较。 关键词:自动配料系统静态配料模式动态配料模式 1.钢铁自动化配料的应用现状 钢铁行业现在越来越重视配料,提出了“精料方针”,从原料进厂开始要求全过程控制。“精料方针”的重要性是显而易见,但真要落实确存在一定的难度,首先,要提高配料系统的自动水平和配料精度;第二,要从生产管理上下功夫,制定配料计划;第三,要加强原料及成品化验,提高化验的准确性、抽样及化验的频度等。自动化配料是其中的重要一环,它是配料计划正确执行的根本保证,如果没有高水平的自动化配料系统,精料方针根本无从谈起。 自80年代末期,钢铁企业陆续对配料系统进行改造,逐步实现了自动化配料,随着技术的发展形成了几种不同模式,包括静态计量、电子皮带秤计量、核子秤计量等,各种模式分别适用于不同的应用现场。本文将针对这几种配料模式进行比较并提出一些必要改进措施。 2.几种自动配料模式的原理与优缺点 2.1.静态配料模式 静态配料模式适用于无连续配料要求的现场,这些现场对配料的时间要求不高,可按批次进行配料,批间允许存在一定的时间间隔,如高炉槽下上料前后两批间时间间隔为3~5分钟,每批料由多种物料组成,物料所占比率根据工艺要求在一段时间内相对固定,对单批料的组成比例要求并不严格,只要在较多批中物料组成比例能达到工艺要求即可。 静态配料模式下,各种物料分别贮放在不同料仓,料仓给料一般采用电振给料、螺旋给料或星形给料等形式,计量一般采用计量仓,并配装有压式或拉式重力传感器进行力电转换,信号经二次仪表放大处理后接入PLC或DCS等来完成计量。在一些对时间要求宽的应用场合,可以采用一个计量小车进行统一计量,计量小车沿轨道运行,依次定位到各料仓下按比例进行物料配加,各种物料的配加量采用减差法计算出来。亦有采用单一固定计量仓方式的,各料仓以环状分布在一个计量仓周围,各物料的计量亦采用减差法,物料自溜槽或皮带输送机依次按比例配加到计量仓。 分别计量和减差法计量之间各有优缺点,分别计量可以根据每次所加料的重量、体积来设计合适的计量仓和计量仪表,可以提高计量的准确性,尤其是对小比例物料,但计量仓与计量设备成倍增加,成本较高。减差法计量采用一个计量仓或计量小车,计量设备投资少,同时由于采用同一计量设备,无论计量误差如何,但都可以保证物料按比例配加,但对于小比例物料配加往难以保证其准确性。 计量后的物料经过集中后一般形成层状或段状分布的一批料通过输送设备(如皮带或小车)输送到受料口,进入下一工序,即完成一批料的配加。由于物料计量、输送、加入等环节在时间上可以重叠在,在控制流程可以采用并行方式,
卸船机的发展与应用
卸船机的应用和发展情况 [摘要]随着经济全球化的发展,特别是矿石及煤炭等散货的海运量不断增长。我国各大港口的吞吐量也呈不断上升的趋势。为了提高港口企业的核心竞争力,适应港口散货装卸设备专业化、大型化、高效化的发展趋势,世界各国都在大力研究并应用信息化、自动化和智能化技术来建设和改造散货码头,研制新型散货装卸与输送设备。本文主要介绍了卸船机的应用和发展情况。 [关键词] 卸船机类型性能特点发展趋势 1卸船机的基本结构 卸船机是利用连续输送机械制成能提升散粒物料的机头,或兼有自行取料能力,或配以取料、喂料装置,将散粒物料连续不断地提出船舱,然后卸载到臂架或机架并能运至岸边主输的地方送机系统去的专用机械。使用卸船机可大大提高卸货效率,保持环境清洁减小粉尘污染,使货物卸载过程高效环保。卸船机的种类比较多,其中可分为连续卸船机和非连续卸船机,在非连续卸船机中主要有抓斗门式起重机、转斗岸桥等设备。在连续卸船机中包括链斗式卸船机、螺旋式卸船机、斗轮式卸船机、夹带式卸船机等[1]。 1.1链斗式卸船机 链斗式卸船机是近几年迅速发展起来的一种连续卸船设备。目前、德国、中国都在研制生产这种类型的产品。链斗式卸船机主要由以下部分所组成:链斗取料提升机构、斗式提升机头、旋转机构、受料机构、臂架旋转机构、臂架俯仰机构、行走机构及带式输送机系统等。卸船作业时,链斗从船舱内将物料挖起,通过提升卸入受料机构,在转入臂架中的带式输送机,最后通过中心漏斗、出料带式输送机进入码头上的带式输送机系统[2]。我国已经研制的链斗式卸船机有两种形式,一是悬链式,适用于甲板驳。该卸船机的链斗在取料段没有刚性支架,是悬垂的,落在舱面上作业的料斗在船舶颠簸时,可以随着舱面上下浮动,所以料斗可以紧贴舱面工作,有清仓能力。另一种是L形链斗卸船机,链斗把物料挖出,并提升到顶上,通过螺旋漏斗卸料器,将物料卸臂架带式输送机上运送到后方。L形的取料头可以旋转,臂架可以俯仰及旋转[3]。 1.2螺旋式卸船机 螺旋式卸船机是以螺旋机取料并利用垂直螺旋输送机提升的卸船机。螺旋卸船机主要由垂直臂、水平臂,旋转塔、末端螺旋输送机和门架等构件组成,垂直臂包括有箱型罩和垂直螺旋输送机。垂直螺旋输送机由内螺旋、机壳外螺旋组成,内螺旋用于垂直提升物料,外螺旋用于物料松散及供料。水平臂包括有箱型臂架和水平螺旋输送机两部分。卸船时,先把反面螺旋喂料装置降入待卸物料中,物料在喂料装置中的正向螺旋的作用下向下推送,继而由取料螺旋向中心提升反向螺旋处挤送,反向螺旋则将物料输送到螺旋提升管中,接着内螺旋便把物料垂直提升上,然后通过水平输送机把物料输送到预定的接料处[4]。 1.3斗轮式卸船机 斗轮式卸船机取料装置采用低速旋转的斗轮,由于刚性斗轮具有巨大的挖掘能力,它几乎可用来卸载任何散粒物料,如易结块的或磨削性大的散盐、煤炭和铁矿石等。斗轮式卸船机机构构成如下:具有沿码头前沿轨道移动的大车运行机构;使机身绕中心旋转的旋转机构;使水平臂作上下俯仰的液压油缸驱动装置;使斗轮和波纹挡边带式提升机绕臂架端部旋转的旋转机构;斗轮驱动机构;波纹挡边带式提升机驱动机构;臂架端部转载漏斗;臂架带式输送机和门架中心缓冲仓及伸缩式带式输送机等[5]。斗轮式卸船机作业时装设于垂直臂下端的斗轮对船舱中的料堆进行挖掘取料,充满物料的轮斗回转到顶部时将物料倒入垂直输送机受料段的栅格上。垂直臂头部有固定的圆形接料槽和漏斗,故在垂直臂作回转运行时,垂直提
桥式抓斗卸船机技术操作规程
桥式抓斗卸船机技术操作规程 1.主题内容与选用范围 本规程规定了桥式抓斗卸船机在作业前、作业中、作业后的安全技术操作要求和无船作业时的精检及防台风、防突发性阵风和雷电强对流天气的技术措施。 本规程适用于减载平台桥式抓斗卸船机。 2.基本守则 2.1 司机须经过技术培训并取得操作合格证书方可上机操作,在操作该机前,须仔细阅读说明书,熟悉各项机械性能。 2.2 使用单位应建立交接班记录卡,记录卸船机运行状况。 3.作业前 3.1 司机必须按交接班的要求与上一班司机交好班,全面了解上一班作业 机况,并按《桥式抓斗卸船机日常点检卡》的要求对桥式抓斗卸机进 行检查和保养。 3.2 检查电缆、电缆卷筒和防撞装置是否正常、完好;确认或解除大车、 小车和司机室与各自锚定装置以及系紧防风系缆装置及防爬锲铁。 3.3 卸船机启动前,先检查各就地控制箱的操作位置是否与司机室一致; 在按下“起重机开”按钮前,各机械操作手柄和旋钮必须处于“0” 位。查看大机状态信息,确认无故障、无出错,机况正常。 3.4 放下卸船机前臂架,确认安全钩、俯仰前臂架拉杆的动作正常和各机 械制动器、各限位装置及指示器等装置安全、有效。 3.5 检查起升、开闭、托绳小车、俯仰机构及接料板、挡风升降板等钢丝 绳的完好程度、接头处的牢固情况,对松动的钢丝绳夹头进行紧固。 采用卡板尺(定做)检查C型环及梨形绳套、抓斗链环。C型环达到 报废标准须立即更换。钢丝绳及梨形头达到报废标准的,须上报中控 室。钢丝绳的磨损、断丝及非正常情况,要在交接班薄详细记录。 3.6 检查起升开闭钢丝绳在极限工作位置时,其卷筒上至少保留三圈以 上。 3.7 用起升开闭机构的起升、下降和小车运行机构的前进、后退等动作进 行空载试验,确认各机械制动器、各限位装置(包括起升、下降的同 步限位器)及指示器等装置安全、有效,并且做好卸船机操作的预设
自动上料配料系统方案.(DOC)
自动配料灌装生产线计量系统方案 一、企业现有生产过程情况概述 目前企业的生产过程基本为:粉料采用人工称料用行车或叉车人工运料、手工填料的方式,液料采用称重计量,人工泵送料,反应釜一般采用手动变频启动方式、水计量采用就地显示流量计,需要人工看数手动控制开关,从以上看出企业目前基本没有自动计量及传输控制设备。 1、现存问题 (1)、人工上料,劳动强度大,速度慢; (2)、液体原料采用桶装称重计量或流量计显示,桶内残留和流量计显示误差,造成计量精度差。 (3)、整个产品生产过程采用人工手动控制,劳动强度大,差错率高,废品率高,致使产品质量控制困难大、生产效率低。 (4)、为了适应产品规模化、高质量生产的需要,系统的布局、控制模式、管理软件系统均需要有重新设计、实施。 2、用户需求分析 (1)、产品规模生产要求系统具有更大的产能、更高的稳定性; (2)、降低人工上料劳动强度、提高计量精度; (3)、固体及液体物料均应自动上料、自动计量; (4)、每次生产的不同配方(原料配比)均可在电脑上进行操作; (5)、生产过程实现自动化控制。 二、本方案自动上料配料系统组成 生产线配料主要完成水和4中液料的配料混合。计量罐单独设置,液体原料分开计量加料,现场3排搅拌釜分别为1排3个搅拌罐、2 排3个搅拌罐、3排5个搅拌罐。 1、原料罐四个,分别盛放四种不同的液体原料;水料罐1个,用于暂存水,预留用水 量。现场分别在3排搅拌罐的上部设置5T原料计量罐1台,15T水计量罐1台; 2、每个原料罐底部都安装有送料管道(管道口径DN65),分别由自动阀门和手动阀门 控制开关,每种液料的自动阀门安装在靠近管道出口位置,由送料泵负责将料通过
桥式抓斗卸船机安全技术操作规程(标准版)
( 操作规程 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 桥式抓斗卸船机安全技术操作 规程(标准版) Safety operating procedures refer to documents describing all aspects of work steps and operating procedures that comply with production safety laws and regulations.
桥式抓斗卸船机安全技术操作规程(标准 版) 1.范围 在《安全技术操作规程通则》有关规定的基础上,本规程还规定了桥式抓斗卸船机在作业前、作业中、作业后的安全技术操作要求和无船作业时的精检及防台风、防突发性阵风和雷电强对流天气的技术措施。 2.作业前 2.1司机必须按交接班的要求与上一班司机交好班,全面了解上一班作业机况,并按卸船机例保的要求对卸机进行检查和保养。 2.2检查电缆、电缆卷筒和防撞装置是否正常、完好;确认或解除大车、小车和司机室与各自锚定装置以及系紧防风系缆装置及防爬锲铁。
2.3卸船机启动前,先检查各就地控制箱的操作位置是否与司机室一致;在按下主控制按钮前,各机械操作手柄和旋钮必须处于“0”位。查看整机状态信息,确认无故障、无出错,机况正常。 2.4放下卸船机前臂架,确认安全钩、俯仰前臂架拉杆的动作正常和各机械制动器、各限位装置及指示器等装置安全、有效。 2.5检查起升、开闭、俯仰机构及接料板、挡风升降板等钢丝绳的完好程度、接头处的牢固情况,对松动的钢丝绳夹头进行紧固。检查梨形绳套、抓斗链环、钢丝绳的磨损、断丝及非正常情况,要在交接班薄详细记录。 2.6检查起升、开闭钢丝绳在极限工作位置时,其在钢丝绳卷筒上的缠绕至少保留三圈以上。 2.7用起升开闭机构的起升、下降和小车运行机构的前进、后退等动作进行空载试验,确认各机械制动器、各限位装置及指示器等装置安全、有效,并且做好卸船机操作的预设定工作。 2.8仔细察看周围作业环境,检查高压电缆槽、大车轨道上以及工作区域内有无障碍物。
桥式抓斗卸船机和链斗式连续卸船机的特点及对比
桥式抓斗卸船机和链斗式连续卸船机的特点及对比 大连华锐重工集团股份有限公司张爽 摘要:介绍了桥式抓斗卸船机与链斗式连续卸船机的结构及工作特点,将二者在适用性、卸船效率、能耗、环保及布置方案等方面进行了对比,为设备选型提供参考。 关键词:桥式抓斗卸船机;链斗式连续卸船机;对比 1 概述 随着世界经济的飞速发展,沿海地区煤炭、矿石及粮食等散货的运输需求量不断增大,港口散货码头建设也呈快速发展的趋势。为提高船舶卸货效率,加快港口码头靠泊船舶的周转速度,科学合理地选择合适的散货卸船设备显得尤为重要。 目前,国内外散货卸船机主要有两种:桥式抓斗卸船机和链斗式连续卸船机,两者的特点和性能截然不同。 2 桥式抓斗卸船机的结构及工作特点 桥式抓斗卸船机主要由抓斗、起升/开闭机构、小车运行机构、接料给料系统、大车运行机构、臂架俯仰机构及金属结构等部分组成。其工作原理是通过抓斗从船舱中抓取物料,由主小车转运至料斗上方卸料,经料斗、振动给料器或带式给料机、中继皮带机输出至码头带式输送机,实现码头散货卸船作业。桥式抓斗卸船机垂直于码头布置,通过大车运行机构实现对船舱的覆盖作业。其结构形式见图1: 图1. 桥式抓斗卸船机总体结构图1-抓斗2-主小车3-臂架4-料斗5-给料设备 6-码头带式输送机7-大车运行机构 3 链斗式连续卸船机的结构和工作特点 链斗式连续卸船机主要由取料装置、链斗提升机(Bucket Elevator,简称BE)、盘式给料器、臂架带式输送机、BE 回转机构、臂架回转机构、臂架俯仰机构、大车运行机构及金属结构等部分组成。其工作原理是由取料装置-链斗将船舱内物料逐层刮取,依靠链斗提升机将物料提升至盘式给料器,盘式给料器连续旋转给料至臂架带式输送机,最后经给料机构输出至码头带式输送机。链斗式连续卸船机的臂架可在液压俯仰机构的作用下变换角度,在设计允许范围内
智能化抓斗卸船机若干关键技术分析
智能化抓斗卸船机若干关键技术分析 我国的海运码头如今正在不断地增加,而海运码头每天所运输的货物量更是与日剧增。货物量的增加使得更多的海运从事者将目光聚焦在了海运货物卸船方式上面,如何采用更加适应潮流的货物卸船方式从而提高卸船效率和搬运质量就成为了一个普遍被关注的话题。 标签:智能化;抓斗卸船机;关键技术 我国的海上丝绸之路计划使得我国的海运得到了极大的发展,而海运本身也是需要很多技术支持的,除了在海上运输的过程中需要极高的航海技术,在船只到达码头后对船上货物进行卸货也同样需要技术支持。在货物卸船中难度最大的货物卸船应当是散货卸船,散货卸船所指的是在海运中运载煤炭、化肥、蔗糖、谷物、矿石等运载船只的卸船工作,散货运载船目前的运载量是仅次于集装箱运载量的第二大海运运载船。而对于散货运载船的卸货而言其远比集装箱卸货要困难的多,于是针对这样的情况桥式智能化抓斗卸船机就应运而生了,利用这种卸船机进行散货卸船工作可以在最大程度上提高卸船的效率并且保证卸船的质量。 1 桥式智能化抓斗卸船机的控制方式 桥式智能化抓斗卸船机有着不同的运行方式,通过对人工依赖程度的不同,我们将之分为手动、半自动、全自动三种。在当今智能化控制技术快速发展的情况下桥式抓斗卸船机也同样走上了智能化的道路。桥式抓斗卸船机的智能化方面主要是表现在其防摆自动控制系统方面,这种自动控制系统在国内的应用已经非常广泛但是这种技术只是一种缓解司机工作中连续作业过于疲劳的一种途径,其并不能真正实现桥式抓都卸船机的真正自动化工作,充其量也仅仅是一种半自动化的系统。在桥式抓斗卸船机的工作过程中其主要操作者和决策者依然还是桥式抓斗机的司机而非智能化程序,并且在对料点进行抓取时还是需要人工的帮助因此这种智能化抓斗卸船机如果真正想脱离人工还需要走一段很长的路,尤其是在人工智能对智能化抓斗卸船机的控制方面和对于货物堆料点的检测及图像分析方面都还需要有更大的进步。下面就来介绍一下目前的几种桥式抓都卸船机的控制方式。 1.1 传统抓斗卸船机 手动卸船方式是对司机要求最高的一种卸船方式,司机在操作工程中必须高度集中精力,不能有丝毫差池,因此对手动卸船方式时,其操作难度也是最大的。司机用操作联动台上的手柄对车的行走和抓斗的速度及抓斗的开合进行控制。这个过程中需要司机具有极多的桥式抓斗卸船机的操作经验,对抓料点的控制与对抓斗摆动的控制都是一种相对主观的工作起最考验司机的操作水平。并且就算司机的经验老道但对于这些复杂的工作也依旧可能会在体力与脑力消耗过度的情况下出现失误。
自动配料系统控制
CHANGZHOU INSTITUTE OF TECHNOLOGY 《电器与可编程控制》课程设计说明书题目:自动配料系统控制 二级学院(直属学部):延陵学院 专业:电气工程及其自动化班级:09电Y3 学生姓名:学号:09121115 指导教师姓名:俞霖职称:讲师 2011年12月26日
电器与可编程控制课程设计任务书 二级学院延陵学院专业:电气工程及其自动化班级:09电Y3 学生姓名指导老师俞霖职称讲师课题名称课题:电器与可编程控制 指标及要求达到设计课题的控制要求,上机调试PLC控制程序,打印PLC 序,计算机绘图。 课题工作内容工作内容:1、熟悉课题工作原理。 2、设计方案论证,系统建立,电气原理控制设计。 3、元器件选择,梯形图设计(控制分析)。 4、完成设计图纸,完成设计任务书。 5、设计测评。 进程安排第一天:下达任务,收集资料,设计准备,方案确定。第二天:电气原理控制设计,元器件选择。 第三至九天:梯形图设计(控制分析),上机调试。第十天:完成设计图纸,完成设计任务书,设计测评。 主要参考文献《可编程控制原理与应用》北京理工大学出版社范次猛《可编程控制应用技术实训指导》化学工业出版社李俊秀《电气控制与PLC应用》北京机械工业出版社余雷生方宗达《电气控制与可编程控制器技术》化学工业出版社史国生 地点秋白楼B511教室起止日期2011.12.26—2012.1.6 指导教师:俞霖 2011年12月26日
目录 电器与可编程控制课程设计任务书 (2) 一绪论 (4) 二自动配料系统控制的介绍 (6) 2.1自动配料系统的特点 (6) 2.2自动配料系统的组成 (7) 2.3配料技术的最新进展 (7) 三设计内容及要求 (8) 3.1.控制要求 (8) 3.2.设计要求 (8) 3.3.控制原理 (8) 3.4.控制方案 (9) 四硬件设计 (10) 4.1.元器件选择 (10) 4.2.元器件的清单 (10) 4.3.硬件控制原理图 (12) 五软件设计 (13) 5.1.设计理想及流程图 (13) 5.2.I/O表 (15) 5.3.程序及说明 (15) 5.4.PLC外部接线图 (18) 六运行调试 (20) 七小结 (21) .参考文献 (22) 附录 (23) 1.主电路图 (23) 2.控制电路图 (23) 3.程序(梯形图) (25)
桥式抓斗卸船机简介
桥式抓斗卸船机 设备简介 二00六年五月 一.系统介绍 抓斗卸船机就是用来将大量固态货物从船舱运至码头上得煤料传送带上得机器。卸船得方法就是先用钢丝绳控制得机械抓斗掘起货物,卸入煤斗,再放于码头得煤料传送带上。 卸船机可单由一个司机操作。在驾驶室可进行所有必要得控制与显示。 驾驶室位于后桥架下,能完全观测整个操作过程。 卸船机也可以自动得进行重复得挖料、行走与放料操作。因此司机可以不用时刻手抓操纵杆控制而可以自由监视卸船过程。 二.卸船机在电厂输煤系统中得作用 电厂内输煤系统主要完成卸煤、储存、分配、筛选、破碎、输送等工作,卸船机主要功能就就是将来煤从船仓里抓起散煤,放入带给料器得煤斗,经分流导板落在电厂得系统皮带上,运至下游设备。 三.卸船机机构组成 卸船机主要由以下几大部分组成: 1.大车行走机构,包括夹轮器、暴风锚定装置及防风系缆。 2.机器房,包括起升开闭机构、小车横移机构、变幅机构。 3.钢丝绳系统,抓斗,主小车与副小车。 4.臂架俯仰机构,配有安装在机械房内得钢丝绳绞车。 5.移动式司机室。 6.带有过载保护得料斗。 7.转载、卸载皮带机。 8.带有缓冲托架得双通道卸料溜槽。 9.撒料挡板。 10.喷水除尘系统。
11.进出通道,电梯。 12.辅助维修起重机。 13.电气室与电气设备。 14.液压动力装置。 四.卸船机各个主要机构得作用 1. 起升、开闭机构该机构主要就是对抓斗进行操作,抓取物料,吊清仓机等; 2. 俯仰机构该机构主要就是在船舶停泊与不停泊得时候,当卸船机从一个船舱 移动到另一个船舱时,或者卸船机在脱离操作得位置时,为了防止臂架碰到船舶上部结构,又或者遇到台风时,必须收起臂架; 3. 大车机构该机构主要就是在码头轨道上移动整个卸船机; 4. 小车机构该机构主要就是牵动抓斗,达到抓料、卸料得目得; 5. 司机室行走该机构主要就是使司机室在臂架上前后移动,始终就是司机能观 察到抓斗得状态。 五.卸船机各个机构得操作要点 1. 起升、开闭机构 本机构操作模式有以下几种; a、支持模式:支持电机单动模式 b、开闭模式:开闭电机单动模式(抓斗初始化需要) c、起升+开闭模式:手动抓斗工作模式 d、抓斗模式:正常自动/半自动作业模式 e、推耙机模式:起吊清仓机得专用模式 抓斗初始化 每次PLC上电或起升编码器故障后,“闭斗初始化”与“开斗初始化”指示灯闪烁,抓斗必须重新进行处始化。 初始化操作流程:选择起升+开闭模式→将抓斗上升到上停止位置,完成起始初始化→选择开闭单机模式→闭合抓斗→按”闭斗初始化”按钮;”闭斗初始化”指示灯亮,闭斗初始化完成→打开抓斗→按“开斗初始化”按钮,“开斗初始化” 指示灯亮,开斗初始化完成→抓斗初始化完成,可以进行抓斗模式作业。 A.起升初始化
桥式卸船机
500T/h 桥式卸船机电气控制系统《方案说明书》 2006年11月
1 总则 (3) 2 标准规范 (3) 3 电气系统设计原则 (3) 3.1 高效安全的自动运行功能设计 (3) 3.2 可靠的测量与保护手段 (4) 3.3 控制系统的基本功能 (4) 4 电气系统主要控制功能描述 (5) 4.1操作站功能与选择 (5) 4.2操作模式 (6) 4.3运行机构的通用逻辑控制功能 (6) 4.4支持、开闭电机的起停顺序 (7) 4.4.1支持、开闭电机的起停顺序 (7) 4.4.2检测元件 (8) 4.5小车机构运行控制 (8) 4.6变幅机构运行控制 (9) 4.7大车电机运行控制 (9) 4.7.1检测元件 (9) 4.8自动抓斗控制 (10) 4.8.1抓斗初始化 (10) 4.8.2自动开闭斗 (10) 4.8.3位置同步 (10) 4.8.4负载平衡 (11) 4.8.5最大抓取量控制(深挖) (11) 4.9半自动工作流程 (11) 4.10急停操作 (12) 4.11超速保护与超速复位按钮 (12) 4.12故障蜂鸣器(位于联动台上) (12) 4.13故障确认/故障复位/故障指示灯 (12) 4.14位置编码器校正 (13)
1 总则 本方案适用于桥式卸船机电气设备技术要求,符合原《技术规格书》,原则上不改动电控系统的硬件结构,尽最大的可能满足业主的要求。 2 标准规范 卸船机的设计、制造、安装和调试全部符合中华人民共和国国家标准及有关国际标准。提供的图纸和文件均采用中文书写。 IEC 国际电工委员会标准; GBJ232 电气装置安装工程施工及验收规范; GB1497 低压电器基本标准; 3 电气系统设计原则 3.1 高效安全的自动运行功能设计 系统基于国际先进且成熟可靠的系统设计,提供如下高效安全的自动运行功能: ?抓斗自动开闭斗控制,实现软开斗及闭斗,消除手动开闭斗对电机和机械的冲击 ?抓斗自动深挖控制,实现最大抓取量控制,提高每次抓取物料的效率 ?最优半自动运行控制,自动实时构造半自动运行曲线,安全,高效 ?静态卸料和甩斗卸料方式选择,满足高效装卸不同状态物料的要求,提高卸料效率 ?位置同步控制,保证起升、开闭机构同步升降 ?负载力矩平衡控制,保证起升、开闭机构出力均衡,并有效防止洒料 ?精确定位控制,卸料不撒出料斗 ?自动防摇控制,根据随动控制理论和动力学分析建模,精确控制抓斗摇摆,保证机械安全及精确定位 ?变幅及其挂钩全自动联动,效率高,避免人工误操作可能产生的危害
自动配料系统
摘要 可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。它采用可编程序的存贮器,用来在其内部存贮执行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令,并通过数字的、模拟的输入和输出,控制各种类型的机械或生产过程。 PLC具有通信联网的功能,它使PLC与PLC 之间、PLC与上位计算机以及其他智能设备之间能够交换信息,形成一个统一的整体,实现分散集中控制。 原始配料过程中工人工作繁重,出错率高,称重的重量无监测,生产数据无纪录等不能保证企业的生产工艺?文中以PC机编程,可编程逻辑控制器(PLC),现场总线技术等现代工控技术为基础,开发了以PC机为上位机, 以PLC作为下位机的自动配料系统?在整个生产过程中,一旦生产计划制定完成,计算机将按照计划对每种原料进行称重,不再需要人工来干预?在这个过程中工人只是进行取料,由计算机通过电子称发来的数据校核重量,减轻了工人的工作负担,提高了工作效率? 关键词:通信,配料,PLC Abstract
Programmable controller is a digital computing operation of electronic systems, specially designed for application in industrial environment. It USES a programmable memory, used in its internal storage implementation logic operation, sequence control, timing, counting and arithmetic operation instruction, and through digital and analog input and output, control various types of machinery or production process. PLC has the function of communication network, it makes the PLC and between PLC and between PLC and upper computer, and other intelligent device can exchange information, form a unified whole, realize the centralized control. Raw ingredients in the process of workers to work hard, error rate is high, the weight of the weighing no monitoring, production data, no records cannot guarantee companies such as production process. In this paper to the PC programming, programmable logic controller (PLC), field bus technology and other modern industrial control technology as the foundation, developed with PC to PC, PLC as lower machine of automatic batching system. In the whole process, once finish production plan, the computer will be carried out in accordance with the plan of each raw material weighing, no longer require human intervention. In this process is to take material, data from all parts of the computer through the electronic said check weight, reduce the workload of workers, improve work efficiency. Key words: communication, ingredients, PLC 第一章、绪论
自动配料控制系统文献综述
自动配料控制系统文献综述 1 前言 自动配料系统在轻工、纺织、塑料、食品、制药、化工等行业得到了广泛应用, 并具有很好的发展前景。通过许多关于自动配料控制系统的文献,设计出自动配料系统具有通用性强、自动化程度高、工作可靠性高、人机界面友好、可进行远距离控制、成本低廉等特点。 当前针对某一行业, 配料仪器所用传感器种类、量程基本固定,配料的种类数基本固定, 因此, 目前的配料仪器产品使用场合单一, 针对不同行业, 要设计出不同的配料仪器, 使大批量生产难于实现, 这就使得资源的利用率不高, 产品生产成本过高。因此, 能够开发出可适配多种不同类型的传感器, 具有智能去皮、精确配料、配料种类数由操作人员选择的新型配料仪, 具有广泛的应用价值。本设计就是以基于单片机为核心, 设计出能适配不同种类传感器和应用于不同行业的通用型自动配料仪。 2 国内外现状 近年来我国的配料工业发展迅速,小型配料系统的设备性能有了很大提高。自动配料装置的核心设备是配料秤,配料秤性能好坏,将直接影响配料质量的优劣。用微机代替控制仪表进行称量配料,可以对称量误差进行自动补偿,保证配料的准确性,通过微机的键盘和显示器方便进行人机对话,还科研调用管理完成参数设置,
检查和修改工艺设定值,并监视称量配料的生产过程,发现故障及时报警,通过打印机及时打印生产报表,自动完成统计工作。这样,可以降低原料消耗,提高产品质量,实现生产过程的实时动态监视,配料精度低主要原因是电子秤系统的动态X 围小,而可靠性主要是中间继电器和过程控制的微机控制系统的可靠性低所致,针对实际问题,采用可编程控制器来代替中间的继电器和过程控制的微型机,为了实现生产过程的动态监视,使用微型机与PLC通信,在屏幕上显示出动态生产数据。可靠性是重要的质量指标,由于机械工艺,电子元件等基础,工业发展的滞后,国内电脑配料系统可靠性与国外产品相比尚有一定差距。 主要面临的问题是: ( 1)不同行业使用的传感器不同, 输出的电信号不同, 这就给信号的初期放大处理和程序设计带来困难。 ( 2)不同行业配料种类数不同, 控制信号数不同, 这就给控制电路和处理程序的设计带来困难。
大型桥式抓斗卸船机托绳小车系统(1)
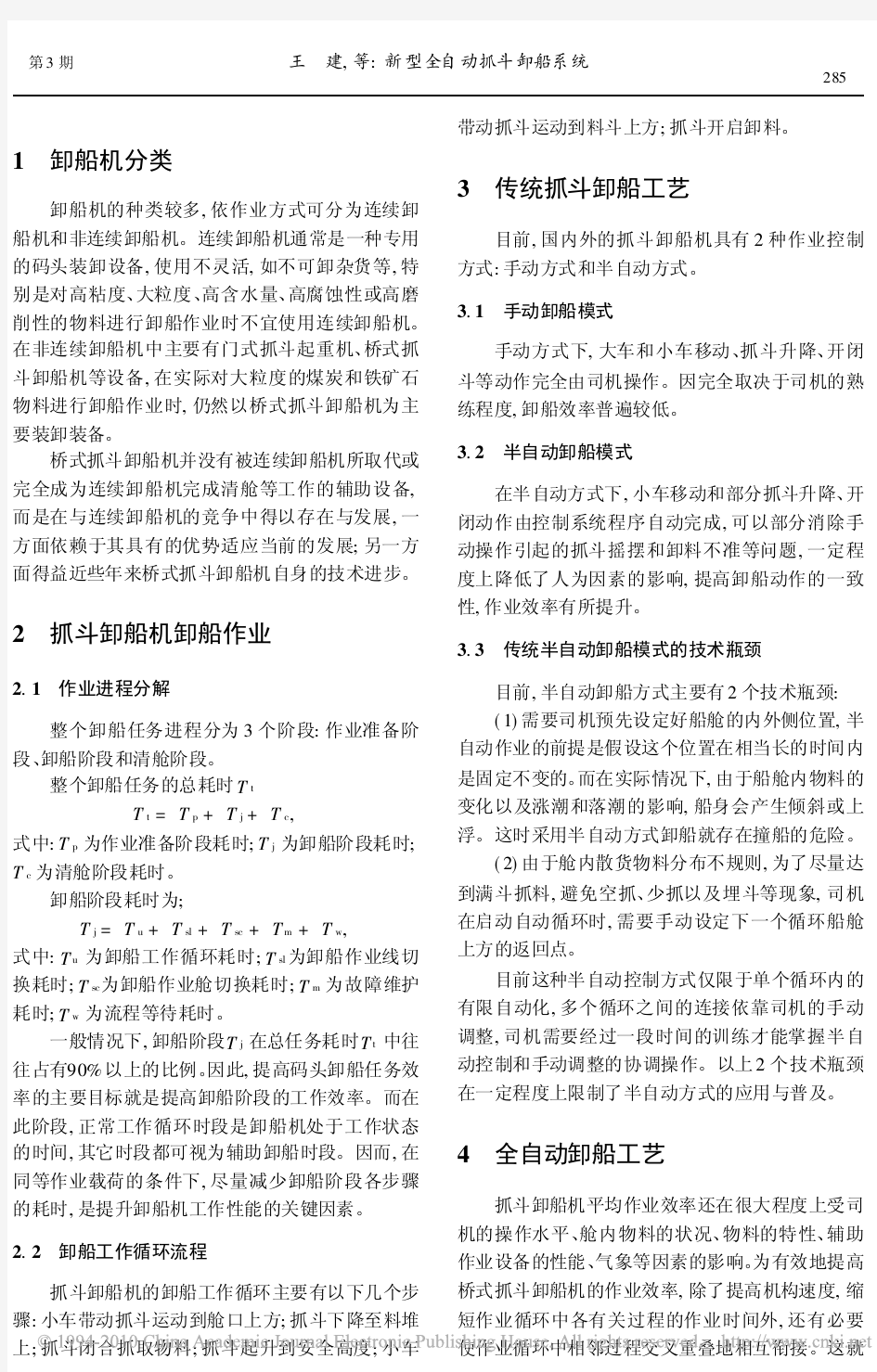
大型桥式抓斗卸船机托绳小车系统 上海海运学院 沈 莹 王悦民 摘 要:青岛2500t/h 矿石抓斗卸船机创造性地在大型抓斗卸船机中采用了抓斗起升、开闭与小车运行“三合一”的四卷筒差动补偿方式,其关键技术之一是首创研制出的四托绳小车系统。本文介绍了采用此系统的主要原因及此系统的主要特点。 关键词:桥式抓斗卸船机;四托绳小车系统;特点;计算 Abstract :As one of large grab ship unloaders ,the Qingdao 2500t/h ore grab ship unloader firstly adopts grab lift 2 ing ,opening ,closing and trolley traveling “Triune ”four -drum differential compensating mode 1This paper presents fea 2tures of four rope -supporting trolley system ,which is critical to realize the compensating mode mentioned above ,and explains why to use it in the Qingdao ship unloader 1 K eyw ords :grab ship unloader ;four rope -supporting trolley system ;feature ;calculation 青岛2500t/h (起重量62t )矿石抓斗卸船机 是目前生产率位居全球第2、亚洲首位的大型抓斗卸船机。它创造性地采用了抓斗起升、开闭与小车运行“三合一”的四卷筒差动补偿方式,从而解决了传统抓斗卸船机或小车自重过大或钢丝绳过多、使用寿命短等一系列问题。这项全新的研究填补了我国大型抓斗卸船机主要依靠进口的空白,也为我国自行设计、制造同类型设备,走向国际市场迈出了坚实的一步。其关键技术之一是首创研制出的四托绳小车系统 。 图1 2500t/h 抓斗卸船机主小车绕绳系统原理图 1、4、61开闭滑轮 2、5、71支持滑轮 31主小车 81卷筒 91支持钢丝绳 101开闭钢丝绳 1 问题的提出 四卷筒差动补偿式抓斗卸船机的工作原理(见图1)是利用行星齿轮差动减速箱控制4个卷筒按一定的传动比旋转,从而实现小车的运行及抓斗的升降与开闭。长期以来,国际上一直在中、小型抓 斗卸船机中采用,在大型卸船机中从未使用过。主要原因是其主小车牵引绳与抓斗工作绳合二为一,工作载荷的增加必将引起钢丝绳直径的加大。而在大型卸船机中,主小车运行距离长,钢丝绳自重将引起钢丝绳下垂度增加,因而不能保证抓斗在任何位置都能顺利打开。如北仑2100t/h 主、副小车补偿式抓斗卸船机在小车接近最大前伸距时,就曾出现过抓斗打不开的问题。其二,在抓斗工作过程中,开闭绳和支持绳都将经历从松弛到张紧的快速转换过程(最大速度达到180m/min )。在此过程中,钢丝绳将产生剧烈抖动。由于钢丝绳跨距及自重引起的下垂度增加必将使这一抖动更为严重,不仅易使钢丝绳产生跳槽、断丝,同时也对结构、机构产生冲击。其三,作为挠性构件,钢丝绳垂度过大也易产生钢丝绳之间的相互干涉或勾挂其他部件,从而影响设备的正常工作。因此,根据本机钢丝绳行程长(当主小车在最大前伸距时,后大梁尾 部改向滑轮至主小车滑轮的距离为L max =871798 m )、主钢丝绳直径大(<53mm )的实际情况,并经过大量调查研究及论证,决定在主小车前后各设置2辆托绳小车,共4辆,组成四托绳小车系统。 此系统的基本原理(见图2)是利用5组钢丝绳缠绕系统把所有小车串连在一起,使它们各自的运动符合一定的规律。当贯串钢丝绳的抽绳量为S 时,前牵引钢丝绳2的抽绳量为S 2=2S ,前牵引钢丝绳1的抽绳量为S 1=3S 2。则前托绳小车2的行程L 2=S ,前托绳小车1的行程L 1=S 2=2S ,
(完整版)基于PLC的自动配料系统毕业设计
毕业设计(论文)任务书 专业电气自动化 一、课题名称:基于PLC的自动配料系统设计 二、主要技术指标:系统配料精度:±1%,首尾滚筒距: 2~6m,常用带速: 0.01-0.05m/s 物料密度0.75~2.0t/h,灵敏度:2mv/v 准确度等级:c3级综合误差:±0.02%最大 称量最大安全负荷: 150%最大称量极限过负荷:200%最大称量,称重传感器输入信 号范围 0~30mv,速度传感器输入信号范围: 0~20Hz, RS485串行通讯接口。 4、操作界面要求显示每种物料的下料设定值、实际下料值;通过界面上设置的启动、停车 按钮实现整个系统的开停。 [2]章皓,王先忧,应力刚.可编程控制器在配料自动控制系统中的应用[J].机电工程 [3]秦益霖,MPS课程项目 [4]段梅,李新,PLC在混料控料系统的应用[J]。1997,23(10):30—32,41 [5]张本举,自动配料系统的设计,中国铝业中州分公司计控室,2000年 学生(签名)2010 年 5 月7 日 指导教师(签名)2010 年5 月10 日 教研室主任(签名)2010 年5 月10 日
系主任(签名)2010 年 5 月12 日
毕业设计(论文)开题报告
基于PLC的自动配料系统设计目录 摘要 Abstract 第1章课题来源背景 (1) 1.1.1 课题来源……………………………………………………………………1.1.2 研究的目的和意义…………………………………………………………1.2 设计任务与总体方案的确定………………………………………………. 1.2.1 设计任务……………………………………………………………………… 1.2.2 总体设计方案的确定……………………………………………………… 第2章PLC概述 (1) 2.1 PLC的发展历史................................................. (3) 2.2 PLC的硬件和软件 (4) 2.3 PLC的通讯联网…………………………………………………………… 2.4 PLC的注意事项.....................................................................第3章配料系统简介. (5) 3.1 自动配料系统的特点及优点 (6) 3.2 自动配料系统的组成 (8) 3.3 配料技术的最新进展 (11) 第4章自动配料系统设计 (14) 4.1 称重方式选择 (14) 4.2 给料方式选择…………………………………………..……….. ………….1 5. 4.3 生产线结构 (16) 4.4 配料系统的组成……………….………………………..…………………... 4.5 输送装置的设计………………………………..…………………………….. 4.6 计量系统的设计........................................................................ 第5章控制系统的硬件设计. (19) 5.1 PLC的选配 (19) 5.2 S7—200的特征 (20) 5.3 S7—200的主要组成部件 (23) 第6章系统的软硬件设计 (30) 第7章系统的监控组态 (43) 第8章结束语 (58) 参考文献
桥式抓斗卸船机安全技术操作规程标准版本
文件编号:RHD-QB-K9714 (操作规程范本系列) 编辑:XXXXXX 查核:XXXXXX 时间:XXXXXX 桥式抓斗卸船机安全技术操作规程标准版本
桥式抓斗卸船机安全技术操作规程 标准版本 操作指导:该操作规程文件为日常单位或公司为保证的工作、生产能够安全稳定地有效运转而制定的,并由相关人员在办理业务或操作时必须遵循的程序或步骤。,其中条款可根据自己现实基础上调整,请仔细浏览后进行编辑与保存。 1. 范围 在《安全技术操作规程通则》有关规定的基础上,本规程还规定了桥式抓斗卸船机在作业前、作业中、作业后的安全技术操作要求和无船作业时的精检及防台风、防突发性阵风和雷电强对流天气的技术措施。 2. 作业前 2.1 司机必须按交接班的要求与上一班司机交好班,全面了解上一班作业机况,并按卸船机例保的要求对卸机进行检查和保养。
2.2 检查电缆、电缆卷筒和防撞装置是否正常、完好;确认或解除大车、小车和司机室与各自锚定装置以及系紧防风系缆装置及防爬锲铁。 2.3 卸船机启动前,先检查各就地控制箱的操作位置是否与司机室一致;在按下主控制按钮前,各机械操作手柄和旋钮必须处于“0”位。查看整机状态信息,确认无故障、无出错,机况正常。 2.4 放下卸船机前臂架,确认安全钩、俯仰前臂架拉杆的动作正常和各机械制动器、各限位装置及指示器等装置安全、有效。 2.5 检查起升、开闭、俯仰机构及接料板、挡风升降板等钢丝绳的完好程度、接头处的牢固情况,对松动的钢丝绳夹头进行紧固。检查梨形绳套、抓斗链环、钢丝绳的磨损、断丝及非正常情况,要在交接班薄详细记录。
2.6 检查起升、开闭钢丝绳在极限工作位置时,其在钢丝绳卷筒上的缠绕至少保留三圈以上。 2.7 用起升开闭机构的起升、下降和小车运行机构的前进、后退等动作进行空载试验,确认各机械制动器、各限位装置及指示器等装置安全、有效,并且做好卸船机操作的预设定工作。 2.8 仔细察看周围作业环境,检查高压电缆槽、大车轨道上以及工作区域内有无障碍物。 2.9 检查漏斗的积料情况,检查斗门开度,斗门应在关闭位置。确认安装了与接卸煤炭容重相匹配的抓斗。 2.10 减载船舶靠离泊时,应听从指挥及时移动卸船机至安全位置,避免与船舶碰撞。 2.11 检查电气房空调运行情况。 3. 作业中