KUKA KRC2机器人备份路径设置
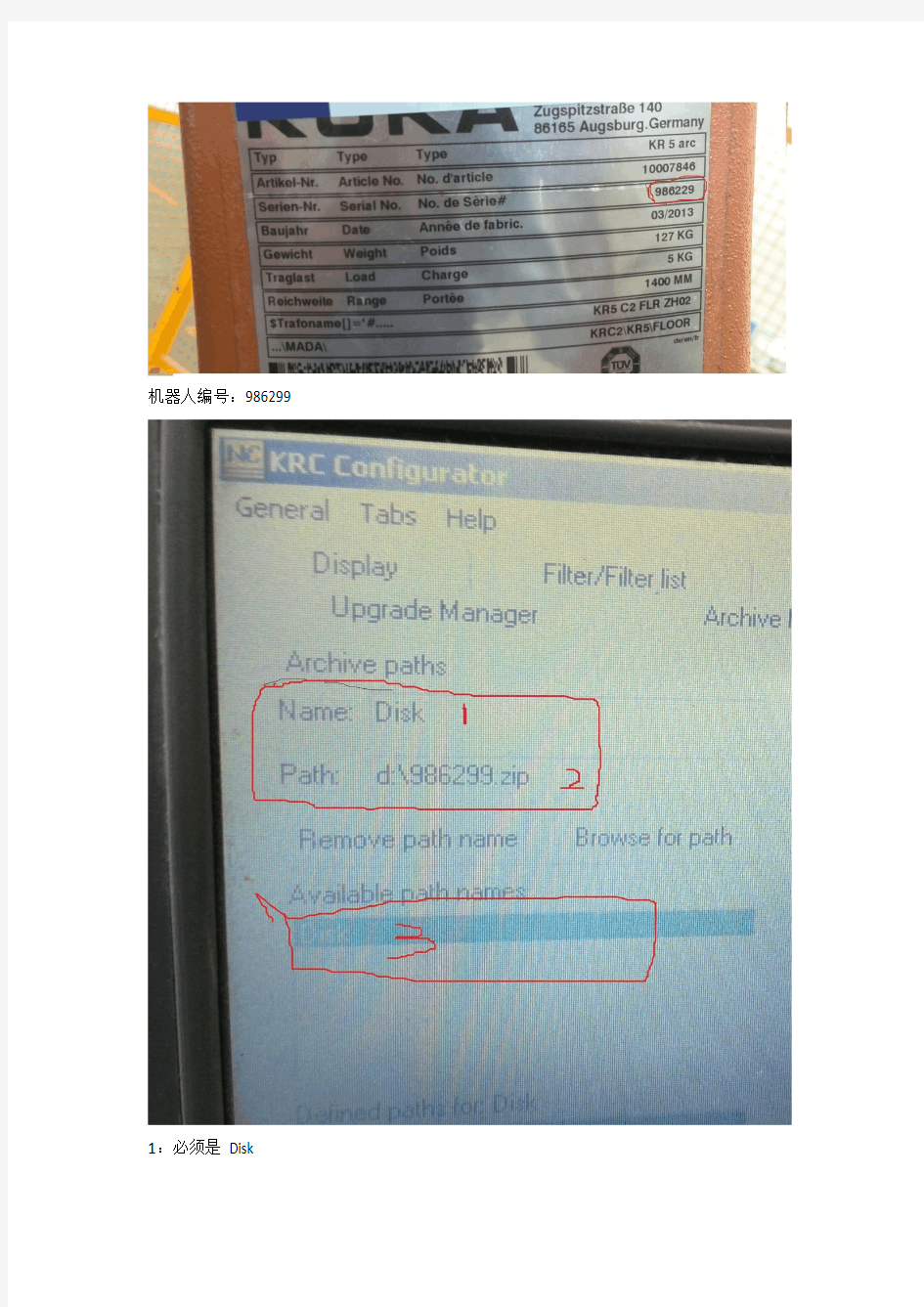
机器人编号:986299
1:必须是Disk
2:一般设置为D:\机器人编号.ZIP
3:只要“Disk”多的删除掉
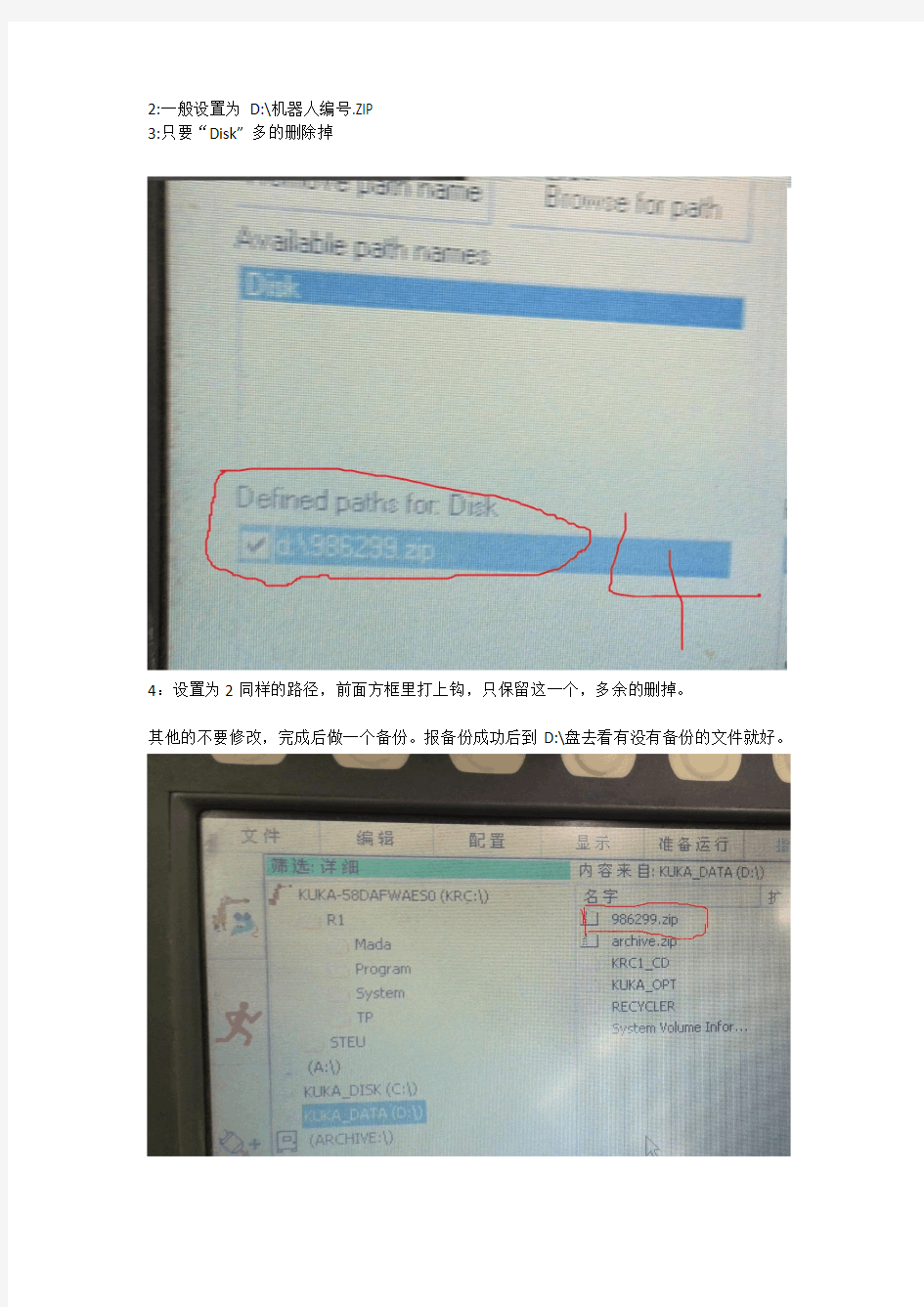
4:设置为2同样的路径,前面方框里打上钩,只保留这一个,多余的删掉。
其他的不要修改,完成后做一个备份。报备份成功后到D:\盘去看有没有备份的文件就好。
KUKA机器人使用经验总结
1.机器人如何在一个平面内运动 解决办法:设置工具坐标、基座标,然后在调用PTP、LIN、CIRC指令时设置所用坐标为基座标即可 2.如何让机器人走相对位置 解决方式:通过查资料及试验发现,展开所用命令LIN P1,所走的P1点的坐标存在XP1中,XP1是E6POS类型,可直接对XP1.X,XP1.Y,XP1.Z,XP1.A,XP1.B,XP1.C这六个坐标参数赋值,赋完值后,再执行LIN XP1,机器人就会走到赋值的坐标点,如此便可进行相对赋值,如P2点需要在P1点X轴方向再前进200mm,则可设为XP2.X=XP1.X+200;将当前机器人坐标值赋给指定的P3点方法为XP3=$POS_ACT 3.如何与机器人建立通讯 解决方法:当机器人为客户端时,写一个外部电脑的服务器程序,设置外部电脑IP,开启服务器监听程序,机器人端按照所给示例设置对应的XML配置文件,写相应的运行代码,解析通讯数据并做相应的回应,然后运行,通讯时外部电脑关掉防火墙,否则通讯不上。机器人做服务器也是同理,区别只在于:机器人方面,XML配置文件中要改一下设置,外部电脑要改成客户端程序。 4.机器人外部IO如何使用 解决方法:机器人外部IO由机器人自身供电,接线方式如下:
判断机器人的指定输入端1是否有信号指令为WAIT FOR $IN[01],当端口1有信号,程序将会往下进行,否则一直等待。设置输出端6的指令为$OUT[06]=TRUE,有几个输出信号为固定的安全类信号,不能设置,如OUT[01]默认为控制器就绪,OUT[02]默认为紧急关断闭合,OUT[08]默认为内部紧急关断等。输入输出信号可在示教器的显示→输入/输出端→数字输入/输出端界面实时查看; 5.如何通过外部传坐标点运行机器人 解决方法:在机器人程序的XML通讯配置文档中的接收项里增加FRAME参数和S、T 两个参数(FRAME参数是保存机器人XYZABC坐标值,两个int型参数保存S、T的值,FRAME 参数决定机器人的目标点位,S、T决定机器人的路径),然后在机器人程序中写读取指令,当机器人与外部电脑通讯时,收到这几个参数,再将参数值赋值给目标点位即可。 6.机器人在执行LIN指令过程中,有时候会报轴超速 解决方法:一般出现该问题,很可能是执行LIN指令的路径会让机器人过奇点,奇点的概念是:即便在给定状态和步骤瞬息的情况下,也无法通过逆向运算得出唯一的数值时,即可认为是一个奇点。六轴机器人有3个奇点,分别是置顶奇点(腕点垂直于机器人的A1轴)、延展位置奇点(腕点位于A2和A3的延长线上)和手轴奇点(轴A4和A6彼此平行,并且A5处于±0.01812°的范围内),在规划机器人的路径时,需尽量避开这三个奇点,可通过调整机器人的姿态避开。
库卡工业机器人运动指令入门知识 学员必备
库卡工业机器人运动指令的入门知识 问?学完了的运动指令后,可以了解到哪些? 答(1)通过对机器人几种基本运动指令的学习,能够熟练掌握机器人各种轨迹运动的相关编程操作 (2)通过学习PTP运动指令的添加方法,能够掌握机器人的简单编程 机器人的运动方式: 机器人在程序控制下的运动要求编制一个运动指令,有不同的运动方式供运动指令的编辑使用,通过制定的运动方式和运动指令,机器人才会知道如何进行运动,机器人的运动方式有以下几种: (1)按轴坐标的运动(PTP:Point-toPoint,即点到点) (2)沿轨迹的运动:LIN直线运动和CIRC圆周运动 (3)样条运动:SPLINE运动 点到点运动
PTP运动是机器人沿最快的轨道将TCP从起始点引至目标点,这个移动路线不一定是直线,因为机器人轴进行回转运动,所以曲线轨道比直线轨道运动更快。此轨迹无法精确预知,所以在调试及试运行时,应该在阻挡物体附近降低速度来测试机器人的移动特性。 线性运动
线性运动是机器人沿一条直线以定义的速度将TCP引至目标点。在线性移动过程中,机器人转轴之间进行配合,是工具或工件参照点沿着一条通往目标点的直线移动,在这个过程中,工具本身的取向按照程序设定的取向变化。 圆周运动 圆周运动是机器人沿圆形轨道以定义的速度将TCP移动至目标点。圆形轨道是通过起点、辅助点和目标点定义的,起始点是上一条运动指令以精确定位方式抵达的目标点,辅助点是圆周所经历的中间点。在机器人移动过程中,工具尖端取向的变化顺应与持续的移动轨迹。 样条运动
样条运动是一种尤其适用于复杂曲线轨迹的运动方式,这种轨迹原则上也可以通过LIN运动和CIRC运动生成,但是相比下样条运动更具有优势。 创建以优化节拍时间的运动(轴运动) 1?PTP运动 PTP运动方式是时间最快,也是最优化的移动方式。在KPL程序中,机器人的第一个指令必须是PTP或SPTP,因为机器人控制系统仅在PTP或SPTP运动时才会考虑编程设置的状态和转角方向值,以便定义一个唯一的起始位置。 2?轨迹逼近 为了加速运动过程,控制器可以CONT标示的运动指令进行轨迹逼近,轨迹逼近意味着将不精确到达点坐标,只是逼近点坐标,事先便离开精确保持轮廓的轨迹。 PTP运动的轨迹逼近是不可预见的,相比较点的精确暂停,轨迹逼近具有如下的优势: (1)由于这些点之间不再需要制动和加速,所以运动系统受到的磨损减少。(2)节拍时间得以优化,程序可以更快的运行。 创建PTP运动的操作步骤 (1)创建PTP运动的前提条件是机器人的运动方式已经设置为T1运行方式,并且已经选定机器人程序。
KUKA简单操作说明书
KUKA简单操作说明书 一、KUKA控制面板介绍 1、示教背面 在示教盒的背面有三个白色和一个绿色的按钮。三个白色按钮是使能开关(伺服上电),用在T1和T2模式下。不按或者按死此开关,伺服下电,机器人不能动作;按在中间档时,伺服上电,机器人可以运动。绿色按钮是启动按钮。 Space Mouse为空间鼠标又称6D鼠标。 2、示教盒正面 急停按钮: 这个按钮用于紧急情况时停止机器人。一旦这个按钮被按下,机器人的伺服电下,机器人立即停止。 需要运动机器人时,首先要解除急停状态,旋转此按钮可以抬起它并解除急停状态,然后按功能键“确认(Ackn.)”,确认掉急停的报警信息才能运动机器人。 伺服上电: 这个按钮给机器人伺服上电。此按钮必须在没有急停报警、安全门关闭、机器人处于自动模式(本地自动、外部自动)的情况下才有用。 伺服下电: 这个按钮给机器人伺服上电。
模式选择开关: T1模式:手动运行机器人或机器人程序。在手动运行机器人或机器人程序时,最大速度都为250mm/s。 T2模式:手动运行机器人或机器人程序。在手动运行机器人时,最大速度为250mm/s。在手动运行机器人程序时,最大速度为程序中设定的速度。 本地自动:通过示教盒上的启动按钮可以使程序自动运行。 外部自动:必须通过外部给启动信号才能自动执行程序。 退出键: 可以退出状态窗口、菜单等。 窗口转换键: 可以在程序窗口、状态窗口、信息窗口之间进行焦点转换。当某窗口背景呈蓝色时,表示此窗口被选中,可以对这个窗口进行操作,屏幕下方的功能菜单也相应改变。 暂停键: 暂停正在运行的程序。按“向前运行”或“向后运行”重新启动程序。 向前运行键: 向前运行程序。在T1和T2模式,抬起此键程序停止运行,机器人停止。 向后运行键: 向后运行程序。仅在T1和T2模式时有用。 回车键: 确认输入或确认指令示教完成。 箭头键: 移动光标。 菜单键: 用菜单键打开相应菜单,通过箭头键选择子菜单,回车键使选中的菜单被应用。用退出键退出打开的菜单。 状态键: 选择机器人的操作状态。
kuka机器人KRC系统操作与编程手册
1.1责任错误!未指定书签。 1.2选用错误!未指定书签。 1.3安全标示错误!未指定书签。 1.4一般安全规定错误!未指定书签。 1.5关于营运者和操作者的特别安全措施错误!未指定书签。 1.6六轴机器人的死点错误!未指定书签。 1.7机器人系统的安全要素:工作空间的限制错误!未指定书签。 1.8机器人系统的安全要素:温度监控错误!未指定书签。 1.9机器人系统的安全要素:试运行模式错误!未指定书签。 1.10机器人的安全要素:使能按键错误!未指定书签。 1.11机器人轴的松开装置错误!未指定书签。 1.12规划和结构:安全和工作空间错误!未指定书签。 1.13安装与操作错误!未指定书签。 1.14安装与操作:安装的安全错误!未指定书签。 1.15安全标记错误!未指定书签。 1.16KUKA培训的安全指导错误!未指定书签。 1.17受静电威胁的组件的处理错误!未指定书签。 二、用户控制&导航 .................................................................... 错误!未指定书签。 2.1系统概述错误!未指定书签。 的技术数据错误!未指定书签。 的PC主机箱错误!未指定书签。 接口错误!未指定书签。 2.1.4机器人上的序列号错误!未指定书签。 2.1.5控制柜上的序列号错误!未指定书签。 2.1.6软件错误!未指定书签。 2.1.7用户组错误!未指定书签。 2.2基本术语错误!未指定书签。 机器人系统的构成错误!未指定书签。 示教器(KCP)错误!未指定书签。 2.2.3机器人类型命名错误!未指定书签。 机器人的机械结构错误!未指定书签。 机器人轴的命名错误!未指定书签。 机器人的工作范围(侧视图)错误!未指定书签。 机器人的工作范围(俯视图)错误!未指定书签。 机器人的载荷分配错误!未指定书签。 机器人上的负载(标准系列)错误!未指定书签。 的有效载荷表错误!未指定书签。 2.3示教器错误!未指定书签。 示教器(KCP)错误!未指定书签。 2.3.2模式选择开关错误!未指定书签。 2.3.3模式列表错误!未指定书签。
KUKA机器人编程手册
发布日期: 13.10.2011 版本: COL P1KSS8 Roboterprogrammierung 1 V1 zh
机器人编程 1 ? 版权 2011 KUKA Roboter GmbH Zugspitzstra?e 140 D-86165 Augsburg 德国 此文献或节选只有在征得库卡机器人集团公司明确同意的情况下才允许复制或对第三方开放。 除了本文献中说明的功能外,控制系统还可能具有其他功能。 但是在新供货或进行维修时,无权要 求库卡公司提供这些功能。 我们已就印刷品的内容与描述的硬件和软件内容是否一致进行了校对。 但是不排除有不一致的情况, 我们对此不承担责任。 但是我们定期校对印刷品的内容,并在之后的版本中作必要的更改。 我们保留在不影响功能的情况下进行技术更改的权利。 原版文件的翻译 KIM-PS5-DOC Publication:Pub COLLEGE P1KSS8 Roboterprogrammierung 1 zh Bookstructure:P1KSS8 Roboterprogrammierung 1 V4.2 版本:COL P1KSS8 Roboterprogrammierung 1 V1 zh 2 / 165发布日期: 13.10.2011 版本: COL P1KSS8 Roboterprogrammierung 1 V1 zh
目录 目录 1KUKA 机器人系统的结构和功能 (5) 1.1机器人技术入门 (5) 1.2库卡机器人的机械系统 (5) 1.3机器人控制系统 (V)KR C4 (8) 1.4KUKA smartPAD (9) 1.5smartPAD 概览 (10) 1.6机器人编程 (11) 1.7机器人安全性 (12) 2机器人运动 (15) 2.1读取并解释机器人控制系统的信息提示 (15) 2.2选择并设置运行方式 (16) 2.3单独运动机器人的各轴 (18) 2.4与机器人相关的坐标系 (21) 2.5机器人在世界坐标系中运动 (23) 2.6在工具坐标系中移动机器人 (27) 2.7在基坐标系中移动机器人 (31) 2.8练习: 操作及手动移动 (35) 2.9用一个固定工具进行手动移动 (37) 2.10练习: 用固定的工具练习手动移动 (38) 3机器人的投入运行 (39) 3.1零点标定的原理 (39) 3.2给机器人标定零点 (41) 3.3练习: 机器人零点标定 (45) 3.4机器人上的负载 (47) 3.4.1工具负载数据 (47) 3.4.2机器人上的附加负载 (48) 3.5工具测量 (49) 3.6练习: 尖触头的工具测量 (58) 3.7练习: 抓爪工具测量,2 点法 (61) 3.8测量基坐标 (63) 3.9查询当前机器人位置 (66) 3.10练习: 工作台的基坐标测量,3 点法 (68) 3.11固定工具测量 (70) 3.12测量由机器人引导的工件 (71) 3.13练习: 测量外部工具和机器人引导的工件 (73) 3.14拔出 smartPAD (77) 4执行机器人程序 (81) 4.1执行初始化运行 (81) 4.2选择和启动机器人程序 (82) 4.3练习: 执行机器人程序 (86) 5程序文件的使用 (89) 5.1创建程序模块 (89) 5.2编辑程序模块 (90) 5.3存档和还原机器人程序 (91) 发布日期: 13.10.2011 版本: COL P1KSS8 Roboterprogrammierung 1 V1 zh 3 / 165
kuka机器人KRC系统操作与编程手册
1.1责任 1.2选用 1.3安全标示 1.4 一般安全规定 1.5关于营运者和操作者的特别安全措施 1.6六轴机器人的死点 1.7机器人系统的安全要素:工作空间的限制 1.8机器人系统的安全要素:温度监控 1.9机器人系统的安全要素:试运行模式 1.10机器人的安全要素:使能按键 1.11机器人轴的松开装置 1.12规划和结构:安全和工作空间 1.13安装与操作 1.14安装与操作:安装的安全 1.15安全标记 1.16KUKA培训的安全指导 1.17受静电威胁的组件的处理 二、用户控制&导航 (14) 2.1系统概述 的技术数据 的PC主机箱14 接口 2.1.4机器人上的序列号 2.1.5控制柜上的序列号 2.1.6软件 2.1.7用户组 2.2基本术语 机器人系统的构成 示教器(KCP) 2.2.3机器人类型命名 机器人的机械结构 机器人轴的命名 机器人的工作范围(侧视图) 机器人的工作范围(俯视图) 机器人的载荷分配 机器人上的负载(标准系列) 的有效载荷表 2.3示教器 示教器(KCP)
2.3.2模式选择开关 2.3.3模式列表 2.3.4示教器窗口操作 235窗口显示 236窗口选择键 237软按键 238状态窗口 239消息窗口消息类型示教器运行程序23 数字小键盘字母键盘光标/回车24 菜单键状态键状态栏状态栏 2.4用户模式导航 2.4.1导航 2.4.2导航中的图表 243用键盘导航 2.4.4新建程序 2.4.5编程状态27 2.4.6存档 2.4.7存档所有 2.4.8存档单个程序 2.4.9恢复所有恢复单个程序 2.5专家模式导航 2.5.1导航(专家) 2.5.2导航中的附加图标(专家) 2.5.3创建一个新模块(专家)2.5.4错误显示 2.5.5错误列表 三、校零.................................... 3.1为什么要校零 3.2校零装置 3.3量具筒横截面 3.4控制运行过程示意 3.5重新校零的原因 3.6用EMT进行轴的校正 3.7为EMT校正做准备 四、坐标系.................................. 4.1轴的精确移动 4.1.1手动使轴精确运动4.1.2用空间鼠标使轴精确运动4.2全局坐标系 4.2.1全局坐标系 4.2.2直角坐标系中旋转角的分配 423右手法则(坐标系方向) 424右手法则(坐标系方向) 425用空间鼠标控制的笛卡儿(直角)坐标系中的运动4.3工具坐标系 4.4基坐标系 五、TCP工具中心点)标定............................ 5.1TCP标定 5.2TCP标定的一般程序 5.3TCP(工具中心点)标定方法36 定标法 5.3.2方位定标法 5.3.4激活工具
kuka机器人KRC系统操作与编程手册
责任 选用 安全标示 一般安全规定 关于营运者和操作者的特别安全措施 六轴机器人的死点 机器人系统的安全要素:工作空间的限制 机器人系统的安全要素:温度监控 机器人系统的安全要素:试运行模式 机器人的安全要素:使能按键 机器人轴的松开装置 规划和结构:安全和工作空间 安装与操作 安装与操作:安装的安全 安全标记 培训的安全指导 受静电威胁的组件的处理 二、用户控制&导航 (14) 系统概述 的技术数据 的PC主机箱14 接口 机器人上的序列号 控制柜上的序列号 软件 用户组 基本术语 机器人系统的构成 示教器(KCP) 机器人类型命名 机器人的机械结构 机器人轴的命名 机器人的工作范围(侧视图) 机器人的工作范围(俯视图) 机器人的载荷分配 机器人上的负载(标准系列) 的有效载荷表 示教器 示教器(KCP) 模式选择开关 模式列表 示教器窗口操作
窗口显示 窗口选择键 软按键 状态窗口 消息窗口 消息类型 示教器运行程序23 数字小键盘 字母键盘 光标/回车24 菜单键 状态键 状态栏 状态栏 用户模式导航 导航 导航中的图表 用键盘导航 新建程序 编程状态27 存档 存档所有 存档单个程序 恢复所有 恢复单个程序 专家模式导航 导航(专家) 导航中的附加图标(专家) 创建一个新模块(专家) 错误显示 错误列表 三、校零............................................................ 为什么要校零 校零装置 量具筒横截面 控制运行过程示意 重新校零的原因 用EMT进行轴的校正 为EMT校正做准备 四、坐标系.......................................................... 轴的精确移动 手动使轴精确运动 用空间鼠标使轴精确运动 全局坐标系 全局坐标系 直角坐标系中旋转角的分配
KUKA机器人安全操作规程
K U K A机器人安全操作规 程 The latest revision on November 22, 2020
焊接机器人安全操作规程 1.机器人动作速度较快,存在危险性,操作人员应负责维护工作站正常运转秩 序,严禁非工作人员进入工作区域。 2.吊离时必须松开所有压紧机构,并确认其不妨碍工件吊离 3.吊装工件应将工件缓慢落在变位机上,尽量避免冲击。 4.调整夹紧机构夹紧工件。注意夹紧机构的位置要始终与编程时的位置一致,并 确认工件的夹紧情况。 5.工作人员在编程示教时,应将机器人调整到T1测试模式(最快运行速度250 mm/s)以确保安全。 6.机器人开机工作中,需要有人员看守。操作人员暂时离开前,先确认系统和电 弧工作正常,并且离开时间不能超过10min。 7.任何情况下更换枪缆、导丝管必须检查水循环是否正常。 8.工件应在变位机上装夹牢固,防止工件在翻转时滑落,造成伤害。 9.装夹工具用完后必须收回,旋转妥当,严禁留在变位机或工件上或随手乱放。 10.机器人工作状态下,变位机翻转区域内严禁人员进入或放置物品。
11.清枪剪丝时机器人动作较快,操作人员应避免停留在清枪剪丝位置附近。经常 查看清枪剪丝效果,如果焊枪在清枪过程中与绞刀位置发生偏移或剪丝效果不好,必须及时检查程序和校正焊枪。 12.示教器和线缆不能放置在变位机上,应随手携带或挂在操作位置,线缆不能严 重绕曲成麻花状和与硬物摩擦,以防内部线芯折断或裸漏。 13.如需要手动控制机器人时,应确保机器人动作范围内无任何人员或障碍物,将 速度由慢到快逐渐调整,避免速度突变造成伤害或损失。 14.机器人各臂载荷能力有限,禁止任何人对机器人施加较大外力。 15.机器人运行过程中必须注意机器人与变位机,机器人与工件的相对位置,确保 安全。操作者自身也应与机器人保持安全距离,以确保自身安全。 16.工作站在非工作状态时,机器人和变位机需置于安全位置。