微小型四旋翼无人直升机建模及控制方法研究_1_5(1)(3)
§3.4仿真结果与分析
与EPFL 的OS4 I 一样,我们的原型机采用了Draganflyer Ⅲ的旋翼。Draganflyer Ⅲ旋翼具有固定攻角,直径28cm ,重6g 。针对这样的微小型旋翼,目前还很难通过理论分析来获得其气动参数。根据§2.3.2的结论可知,能够通过实验方法获得旋翼的升力系数和反扭力矩系数。由于目前我们还不具备相关的实验条件,这里主要参考了文献[27],来获得Draganflyer Ⅲ旋翼的升力系数t k 、阻力矩系数d k 和转动惯量rotor J 。
对于本文§2.2中提到的原型样机,其主要参数如表3.1。
表3.1 原型机主要参数 项目
m l t k d k x I y I z I rotor J 单位
kg m 2s N 2ms N 2m kg 2m kg 2m kg 2m kg 量值 0.75 0.25 513.3?e 75.7?e 3688.19?e 3681.19?e 2938.3?e 56?e
下面将通过定点悬停、轨迹跟踪和鲁棒性检验三个仿真实验,来分析Backstepping 控制器的性能。
1、定点悬停
设置飞行器初始三维位置、速度、欧拉角和角速率分别为0)(m 、0.5)/(s m 、D 30和s /40D ;控制目标是让飞行器从原点飞至并悬停于())(111m T 位置,且要调整并保持航
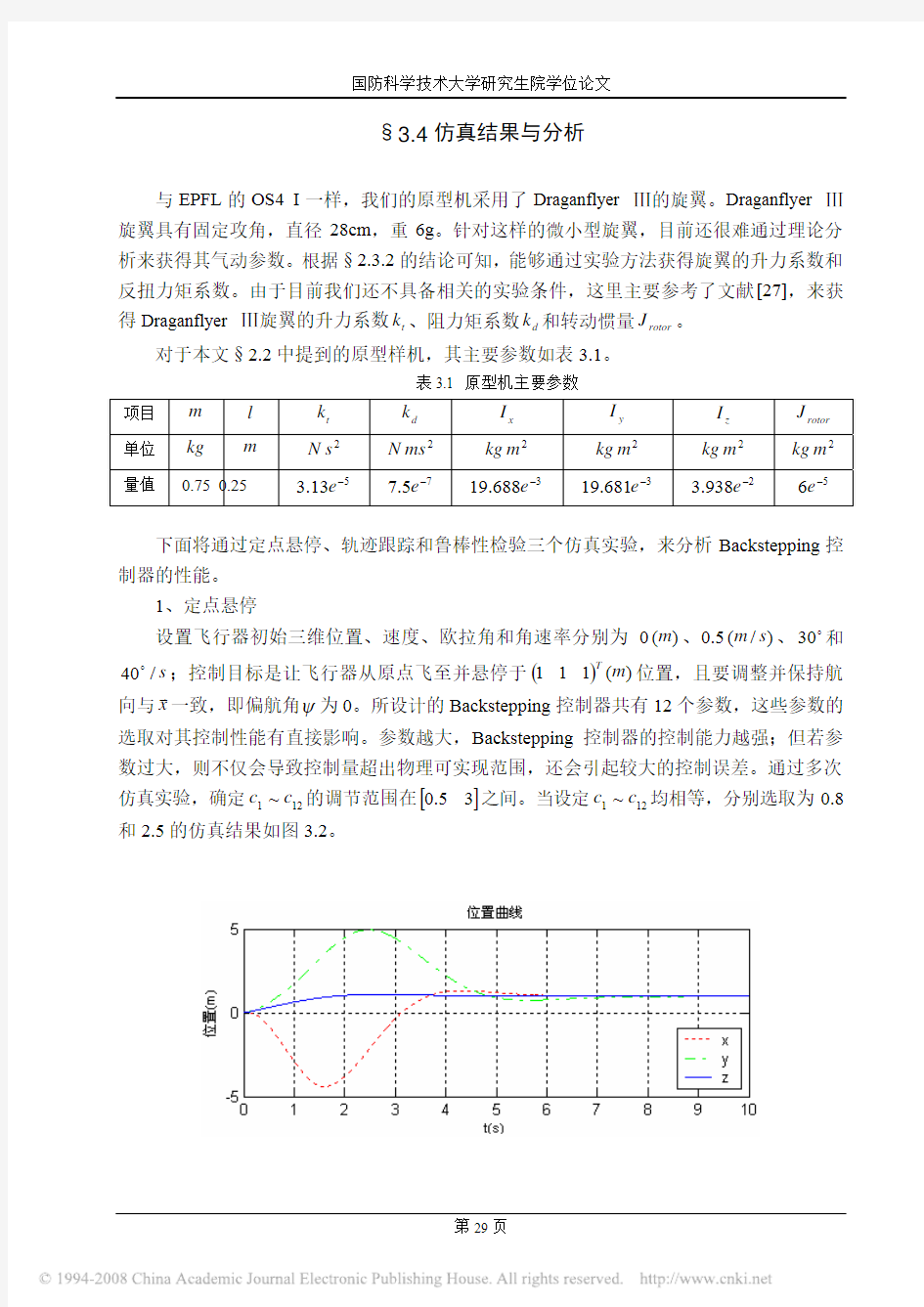
向与x K 一致,即偏航角ψ为0。所设计的Backstepping 控制器共有12个参数,这些参数的选取对其控制性能有直接影响。参数越大,Backstepping 控制器的控制能力越强;但若参数过大,则不仅会导致控制量超出物理可实现范围,还会引起较大的控制误差。通过多次仿真实验,确定121~c c 的调节范围在[]35.0之间。当设定121~c c 均相等,分别选取为0.8和2.5的仿真结果如图3.2。
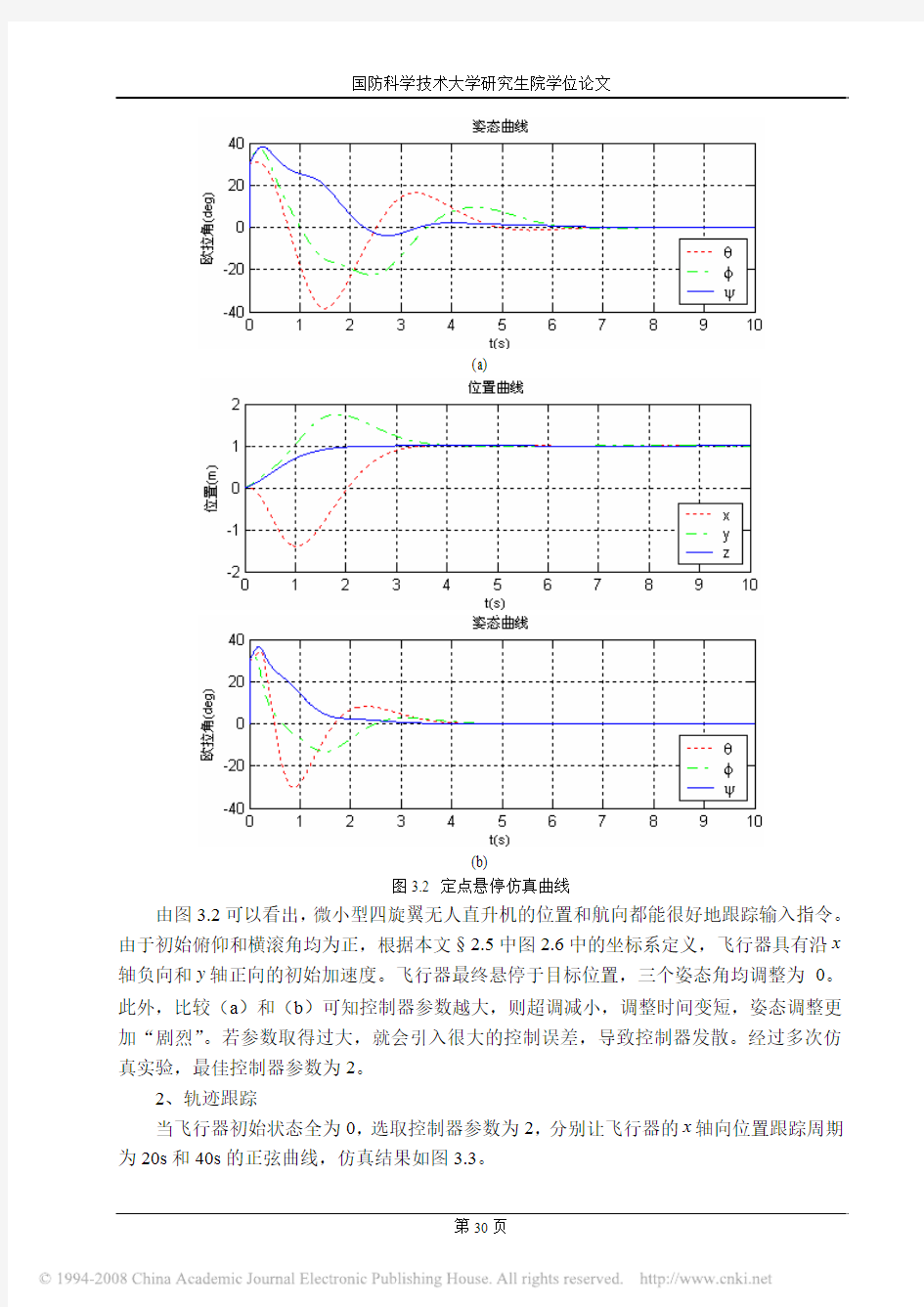
(a)
(b)
图3.2 定点悬停仿真曲线
由图3.2可以看出,微小型四旋翼无人直升机的位置和航向都能很好地跟踪输入指令。由于初始俯仰和横滚角均为正,根据本文§2.5中图2.6中的坐标系定义,飞行器具有沿x 轴负向和y轴正向的初始加速度。飞行器最终悬停于目标位置,三个姿态角均调整为0。此外,比较(a)和(b)可知控制器参数越大,则超调减小,调整时间变短,姿态调整更加“剧烈”。若参数取得过大,就会引入很大的控制误差,导致控制器发散。经过多次仿真实验,最佳控制器参数为2。
2、轨迹跟踪
当飞行器初始状态全为0,选取控制器参数为2,分别让飞行器的x轴向位置跟踪周期为20s和40s的正弦曲线,仿真结果如图3.3。
图3.3 x 轴正弦轨迹跟踪曲线
由图3.3可以看出,系统能够很好地跟踪周期为40s 的正弦曲线,基本无相位延迟和超调;而跟踪周期为20s 的正弦曲线时,出现了较小的延迟和超调。
3、鲁棒性检验
飞行器的初始状态和控制目标与定点悬停实验相同,选取控制器参数为2。为了检验控制器的鲁棒性,对所有状态反馈变量添加5%的高斯白噪声,并设定旋翼转速有min /5r ±的控制误差。此外,还考虑了飞行器三个姿态角分别在10s 、15s 和20s 时刻,发生突变的情形。这种情况是由于电磁干扰或其他原因导致电机控制信号中出现野值,使得某一电机的转速发生短时突变引起的。因为本文仅考虑微小型四旋翼无人直升机在无风条件下飞行的情况,所以这里没有进行阵风干扰实验。仿真结果如图3.4。
(a)
(b)
图3.4鲁棒性检验仿真曲线
由图3.4可以看出,添加噪声以后,微小型四旋翼飞行器仍然能够较好地跟踪输入指令。系统达到稳态后,飞行器的位置和姿态分别在10±cm 和D 5±的范围内波动。对应于姿态角的突变,相应的位置稍有改变,但由于控制器的作用,飞行器很快又恢复到悬停状态。
以上,通过仿真实验检验了微小型四旋翼无人直升机Backstepping 控制器的控制性能。通过调节控制器的参数,可以实现定点悬停控制,达到跟踪误差小、调节时间短的性能指标;轨迹跟踪实验结果说明控制器具有良好的跟踪性能;对于传感器噪声和旋翼转速短时突变的情形,仿真结果证明Backstepping 方法具有一定的鲁棒性,克服了传统控制方法中的闭环系统缺乏鲁棒性的缺点。
§3.5本章小结
本章讨论了微小型四旋翼无人直升机的Backstepping 非线性控制问题。基于简化的动力学模型,利用Backstepping 方法成功的设计出四个通道的控制器,并从理论上证明其收敛性。仿真结果表明,Backstepping 控制器可以较好地实现定点悬停和轨迹跟踪飞行控制,并具有一定的鲁棒性。
第四章基于ADRC的微小型四旋翼无人直升机控制
在上一章中,基于Backstepping实现了微小型四旋翼无人直升机的自主飞行控制。但是所设计的控制器不但结构非常复杂,而且对状态反馈量的要求也很高,其控制性能在很大程度上依赖于对象模型的精度。Backstepping的这些缺点,尤其是它对模型的依赖必将严重限制其实用化。本章将针对这一问题,基于ADRC这一不基于对象模型的控制方法设计微小型四旋翼无人直升机飞行控制器。
§4.1引言
自抗扰控制器(Actived Disturbance Rejection Controller)已经历了20多年的发展历程,如今在控制界已具有一定知名度,不少人被其独特的控制思想及卓越的控制品质所吸引,积极致力于其在尖端科技领域的应用[28]。
现代控制理论在分析控制系统的结构性质方面是非常成功的,提供了很好的分析工具,并发展出比较完备的设计方法。但是现代控制理论构造的控制器不仅结构复杂,并且遇到了不易克服的适应性、鲁棒性等难题。经典调节理论则摆脱了数学模型的束缚,基本上完全不考虑对象模型,仅依靠误差的PID反馈调节。但存在控制器局限于线性模型、动态性能差、微分反馈引入噪声大等问题,品质有待提高[29]。
ADRC则综合了现代控制理论与经典调节理论的优点,提出一种“观测+补偿”的方法,可有效处理系统中的非线性与不确定性问题,同时配合非线性的反馈方式,提高控制器的动态性能[30]。
本章首先详细介绍ADRC的基本原理,然后针对微小型四旋翼无人直升机设计ADRC 控制器,并给出控制器参数整定规则,最后是仿真实验结果。
§4.2 ADRC基本原理
PID的缺点包括[31-32]:直接取设定值与输出之间的误差有时不合理,因为要求让缓变的输出来跟踪跳变的设定值不合理;由误差e提取dt
de/的方法使得噪声很大;误差的现在、过去和变化趋势的“加权和”策略不一定最好;积分反馈有许多副作用。
针对PID的缺点,ADRC利用跟踪微分器(TD)合理提取微分,根据设定值和对象承受能力安排过渡过程解决了快速性和超调之间的矛盾;通过扩张状态观测器(ESO)把系统的未建模动态和未知外扰都归结为对系统的“总扰动”而进行估计并给予补偿,使得不用“积分”反馈也能实现无静差;非线性状态误差反馈(NLSEF)则将原来的“加权和”改成了“非线性组合”[31-32]。
永磁同步电机控制系统仿真模型的建立与实现资料
永磁同步电机控制系统仿真模型的建立与 实现
电机的控制 本文设计的电机效率特性如图 转矩(Nm) 转速(rpm) 异步电机效率特性 PMSM 电机效率特性 本文设计的电动汽车电机采用SVPWM 控制技术是一种先进的控制技术,它是以“磁链跟踪控制”为目标,能明显减少逆变器输出电流的谐波成份及电机的谐波损耗,能有效降低脉动转矩,适用于各种交流电动机调速,有替代传统SPWM 的趋势[2]。 基于上述原因,本文结合0=d i 和SVPWM 控制技术设计PMSM 双闭环PI 调速控制。其中,内环为电流环[3],外环为速度环,根据经典的PID 控制设计理论,将内环按典型Ⅰ系统,外环按典型Ⅱ系统设计PI 控制器参数[4]。 1. PMSM 控制系统总模型 首先给出PMSM 的交流伺服系统矢量控制框图。忽略粘性阻尼系数的影响, PMSM 的状态方程可表示为 ??????????-+????????????????????----=??????????J T L u L u i i P J P L R P P L R i i L q d m q d f n f n m n m n m q d ///002/30//ωψψωωω& && (1) 将0=d i 带入上式,有 ???? ??????-+??????????? ??? ??--=????? ?????J T L u L u i J P P L R P i i L q d m q f n f n m n m q d ///02/3/0ωψψωω& && (2) 转 矩 (N m )转速 (n /(m i n )) 效率 转速 (rpm) 转矩 (N m )
飞机操控系统
飞机操纵系统发展历程和典型飞机操纵系统分析 学生: 学号: 摘要 本文简要的叙述了飞机操纵系统的发展,主要阐述了几个典型飞机操纵系统的产生和具体结构。早期的简单机械系统即可达到飞行的要求,但随着飞机速度和机动性要求的不断提高,飞机操纵系统的性能也不断完善。飞机操纵系统经历了简单机械系统、控制增稳系统、电传操纵系统和光传操纵系统这几个阶段。最后飞机操作系统的每一次改变都是航空发展史上的伟大进步。 关键词:机械操纵系统、控制增稳系统、电传操纵系统、光传操纵系统 Aircraft control system development process and typical aircraft control system analysis Student: Liu He Student ID: 11031182 Abstract This article briefly describes the development of aircraft control systems, mainly on the production and the specific structure of several typical aircraft control systems. Early flight can be achieved by a simple mechanical system, but with the constant increase in air speed and maneuverability, performance aircraft control systems are constantly
飞行控制系统
飞行控制系统 为了使无人机飞行控制系统具有强大的数据处理能力、较低的功耗、较强的灵活性和更高的集成度,提出了一种以SmartFusion为核心的无人机飞行控制系统解决方案。为满足飞控系统实时性和稳定性的要求,系统采用了μC/OS-Ⅱ实时操作系统。与传统的无人机飞行控制系统相比,在具有很强的数据处理能力的同时拥有较小的体积和较低的功耗。多次飞行证明,各个模块设计合理,整个系统运行稳定,可以用作下一代无人机高性能应用平台。 关键词:无人机;飞行控制系统;SmartFusion芯片;μC/OS-Ⅱ 0 引言 飞行控制系统是无人机的重要组成部分,是飞行控制算法的运行平台,它的性能好坏直接关系着无人机能否安全可靠的飞行。随着航空技术的发展,无人机飞行控制系统正向着多功能、高精度、小型化、可复用的方向发展。高精度要求无人机控制系统的精度高,稳定性好,能够适应复杂的外界环境,因此控制算法比较复杂,计算速度快,精度高;小型化则对控制系统的重量和体积提出了更高的要求,要求控制系统的性能越高越好,体积越小越好。此外,无人机飞行控制系统还要具有实时、可靠、低成本和低功耗的特点。基于以上考虑,本文从实际工程应用出发,设计了一种基于SmartFusion的无人机飞行控制系统。 1 飞控系统总体设计
飞行控制系统在无人机上的功能主要有两个:一是飞行控制,即无人机在空中保持飞机姿态与航迹的稳定,以及按地面无线电遥控指令或者预先设定好的高度、航线、航向、姿态角等改变飞机姿态与航迹,保证飞机的稳定飞行,这就是通常所谓的自动驾驶;二是飞行管理,即完成飞行状态参数采集、导航计算、遥测数据传送、故障诊断处理、应急情况处理、任务设备的控制与管理等工作。 飞行控制系统主要完成3个功能任务,其层次构成为三层:最底层的任务是提高无人机运动和突风减缓的固有阻尼——三个轴方向的阻尼器功能;第2层的任务是稳定无人机的姿态角——基本驾驶仪的功能(主要进行角运动控制);第3层的任务是控制飞行高度、航迹和飞行速度,实现较高级自动驾驶功能。飞行控制系统原理框图见图1。 由上述分析易知,飞行控制系统主要由飞行控制器、传感器(或敏感元件)、舵机3部分组成。无人机飞行控制系统的基本架构如图2所示。
飞机操纵系统建模及降阶仿真研究
1 飞机操纵系统建模及降阶仿真研究 北京航空航天大学自动控制系 于黎明 王占林 裘丽华 摘 要本文通过对某型号飞机三轴纵向横向侧向操纵系统机械操纵系统增稳系统自动驾驶仪系统组成结构及功能分析 建立了完整的数学模型将系统分布 参数分段集中化处理 在Matlab 环境下以模块化方式进行系统仿真得到与实际系统静动态响应相吻合的仿真模型由于飞机操纵系统模型的高阶非线性采用最小二乘参数拟合法进行等效降阶处理得到低阶带延迟环节的简化模型这种以时域响应进行优化频域响应进行验证的降价方法得出的仿真结果符合实际系统静动态特性要求证明了等效低阶模型的有效性该模型成功地应用于某型飞行模拟器操纵负荷系统的研究关键词 仿真 操纵系统 等效系统1 前言 飞机操纵系统建模与仿真是飞行模拟器操纵负荷系统研究的一项基本内容操纵负荷系统是使由加载力系统产生的驾驶杆模拟载荷在静态和动态其特性均良好地逼近真实杆力的仿真结果并得到相应状态下舵偏角的响应过程1为此需先对飞机操纵系统进行建模 仿真研究 以得到仿真杆力和杆位移的关系曲线及驾驶杆输入和舵偏角输出的传递特性曲线2操纵系统数学模型 2.1操纵系统结构分析 某型飞机操纵系统由平尾操纵系统副翼操纵系统方向舵操纵系统和差动平尾操纵系统组成同时与自动驾驶仪系统交联平尾 副翼和方向舵操纵系统均是通过拉杆摇臂等硬式传动执行元件是不可逆式液压助力器平尾操纵系统及复合舵机 副翼方 向舵操纵系统驾驶员操纵驾驶杆或脚蹬使控制输入 操纵力或操纵位移通过传动杆 系 执行元件驱动舵面偏转改变飞机的飞行状态操纵系统的数学模型主要是指驾驶员 操纵力与操纵位移之间的数学关系在飞机的任何飞行状态及操纵系统的任何操纵模式下及舵面偏角与操纵位移之间的数学关系 在任何操纵模式下操纵力即杆力或脚蹬力是操纵系统杆系中的弹簧或液压载荷机构加载的还包括传动机构中的摩擦力阻尼力惯性力等同时有传动杆系的间隙 死区等非线性因素的影响舵偏角与操纵位移即杆位移或脚蹬位移之间具有更复杂的动态数学关系操纵位移信号经传动杆传动到控制舵面转角的液压舵机的液压阀上液压舵机根据这一位置信号去驱动舵 面使其偏转相应的角度 2 纵向 横向航向三轴操纵系统数学模型的建立原理基本相同本文以纵向为例 2.2 平尾操纵系统建模 平尾操纵系统用来实现飞机的人工和自动驾驶仪的俯仰控制并参与横滚控制人工俯 仰控制是由驾驶杆拉杆摇臂力臂自动调节器液压助力器弹簧载荷机构调整片效应机构完成自动驾驶仪控制是通过纵向舵机复合摇臂与平尾操纵系统交联实现横滚控制是通过差动平尾控制系统的差动平尾舵机与平尾操纵系统交联实现操纵系统结构 简图1 如下万方数据
基于Matlab永磁同步电机控制系统的仿真建模_李三东
第3卷第2期 2004年4月 江南大学学报(自然科学版) Journal of Southern Yangtze University(Natural Science Edition) Vol.3 No.2Apr. 2004 文章编号:1671-7147(2004)02-0115-06 收稿日期:2003-10-09; 修订日期:2003-11-06. 基金项目:教育部重点科技项目(03085)资助课题. 作者简介:李三东(1979-),男,安徽无为人,控制理论与控制工程专业硕士研究生. 纪志成(1959-),男,浙江杭州人,工学博士,教授,硕士生导师.主要从事电力电子与电气传动的研究. 基于Matlab 永磁同步电机控制系统的仿真建模 李三东, 薛花, 纪志成 (江南大学通信与控制工程学院,江苏无锡214036) 摘 要:在分析永磁同步电机(PMSM)数学模型的基础上,提出了PMSM 控制系统仿真建模的新方法.在Matlab/Simulink 中,建立独立的功能模块:P MSM 本体模块、矢量控制模块、电流滞环控制模块、速度控制模块等,同时进行功能模块的有机整合,搭建P MSM 控制系统的仿真模型.系统采用双闭环控制:速度环采用PI 控制,电流环采用滞环电流控制.仿真结果证明了该方法的有效性,同时该模型也适用于验证其他控制算法的合理性,为实际电机控制系统的设计和调试提供了新的思路. 关键词:永磁同步电机;仿真建模;Matlab;矢量控制中图分类号:TM 341 文献标识码:A Modeling and Simu lation of PMS M Control System Based on Matlab LI San -dong, XUE Hua, JI Zh-i cheng (School of Communication and Control Engineering,Southern Yangtze University ,Wuxi 214036,China) Abstract:Based on the mathema tical model of the permanen-t magnet synchronous -motor (PMSM),a novel method for modeling and simulation of PMSM syste m in Matlab had been proposed.In Matlab/Simulink,the independent functional blocks and such as PMSM bloc k,vector controller block,hysteresis current controller block and speed controller,ect.,had been modeled.By the organic combination of these blocks,the model of PMSM could be easily established.In the double loop of control system,a PI controller was adopted in the speed loop and a hysteresis current controller was adopted in the current loop.The reasonability and validity had been testified by the simulation results.The novel method offers a ne w platform for designing and debug -ging actual motors. Key words:permanen-t magnet synchronous -motor (PMSM);modeling and simulation;Matlab;vector c ontrol 随着电力电子技术、微电子技术、新型电机控制理论和稀土永磁材料的快速发展,永磁同步电机(PMSM)得以迅速推广应用.P MSM 以其体积小、性能好、结构简单、可靠性高、输出转矩大等特点,得到了越来越广泛的应用和重视[1~3].随着PMSM 应 用领域的不断拓宽,对电机控制系统的设计要求也越来越高,既要考虑成本低廉、控制算法合理,又需 兼顾控制性能好、开发周期短等特点.因此,如何建立有效的P MSM 控制系统的仿真模型成为电机控制算法设计人员迫切需要解决的关键问题[4~6].
【CN110135023A】民用飞机舱内压力控制系统建模方法【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910349006.2 (22)申请日 2019.04.28 (71)申请人 西北工业大学 地址 710072 陕西省西安市友谊西路127号 申请人 中国商用飞机有限责任公司上海飞 机设计研究院 (72)发明人 张安 李德林 詹超 康文文 毕文豪 (74)专利代理机构 西北工业大学专利中心 61204 代理人 金凤 (51)Int.Cl. G06F 17/50(2006.01) (54)发明名称 民用飞机舱内压力控制系统建模方法 (57)摘要 本发明提供了一种民用飞机舱内压力控制 系统建模方法,分别建立基于全景视角的系统需 求概要信息模型、基于能力视角的系统需求分析 模型、基于操作视角的系统功能分析模型和基于 系统视角SV的系统架构模型,将Harmony -SE方法 与DoDAF体系架构结合起来,在系统需求分析— 系统功能分析—系统架构设计的层次基础上使 用全景、能力、操作、系统四种视角刻画舱压控制 系统模型,通过各个阶段定义具体的子视图与模 型补充提供舱压控制系统模型的设计思路与概 念描述方法,同时在一定程度上表现了系统不同 视图之间的关联关系,改善和完整了设计人员的 设计思路与研制逻辑。权利要求书4页 说明书15页 附图7页CN 110135023 A 2019.08.16 C N 110135023 A
1.一种民用飞机舱内压力控制系统建模方法,其特征在于包括下述步骤: 步骤1:建立基于全景视角AV的系统需求概要信息模型 对民机舱压控制系统的构想、目的、范围、预计成果进行合并汇总,建立系统需求概要信息包模型Package,系统需求概要信息包模型中每个包视为民机舱压控制系统的一个层面的信息集合,在各个包中创建SysML语言定义的需求图,在需求图中撰写系统整体层面下的构想与期望,作为系统研制初期的方向指引与修改预案; 系统需求概要信息包模型∑AV 的关键概念定义如下: ∑AV =(I,P,R,Sc,So) (1) So=(So template ,So alphabet ,So type ) (2) 其中I指“项目信息包”模型;P指“目的”包模型;R指“范围”包模型;Sc指场景包模型;So 指“系统资源”包模型;So template 指需求模板信息;So alphabet 指需求术语表信息;So type 指以往型号设计资料; 系统需求概要信息包模型中包括项目信息I、目的P、范围R、场景Sc和系统资源So五部分,包模型的“项目信息”中,在需求图中撰写项目层面的参与设计研制的各部门、研制任务的分配、项目起始、成本投入方面的信息,“目的”包模型中提取利益相关方已形成的原始需求,从设计角度描述系统预期的功能以及对系统的可靠性、维护性、保障性非功能性要求,以及出现多种设计方案下的决策流程与决策方法;在“范围”包模型中指出系统预期的运行范围与功能执行范围,明确系统的运行概念与功能边界;在“场景”包模型中根据已定义的运行范围,结合民机及系统任务剖面,定义出民机舱压控制系统需要适应的各种场景以及场景状态信息;除此之外,应定义“系统资源”包模型,记录所有研制过程可能需要包括的研制资源,基本的系统资源包括需求模板So template 、需求术语表So alphabet 和以往型号设计资料So type ;构建的包模型与包中的需求信息即舱压控制系统的系统需求概要信息模型; 其中: 即通过对记录在“目的”包模型P中的舱压控制系统的初始需求进行解析,将其进一步拆解为“范围”包模型R与“场景”包模型Sc的中数据信息,其中功能性及非功能性需求分解为“范围”包模型的系统运行的性能指标与“场景”包模型中的既定运行条件和场景; 步骤2:建立基于能力视角CV的系统需求分析模型 选取DoDAF的能力视角CV下定义的CV -1能力愿景、CV -2能力分类、CV -4能力依赖关系三种子视图作为舱压控制系统需求分析描述的三个层次; 即: ∑CV =(C Vision ,C Taxonomy ,C Dependemciex ) (4) 其中C Vision 指CV -1能力愿景;C Taxonomy 指CV -2能力分类;C Dependencies 指CV - 4能力依赖关系;在舱压控制系统的研制过程中先定义CV -1能力愿景C Vision ,然后根据已定义的C Vision 分解出CV -2能力分类C Taxonomy 与CV -4能力依赖关系C Dependencies ,其中C Dependencies 是对C Taxonomy 的修饰,即在C Dependencies 中定义并表示C Taxonomy 中的子能力之间的相互关系; 权 利 要 求 书1/4页2CN 110135023 A
四旋翼飞行器建模与仿真Matlab
四轴飞行器的建模与仿真 摘要 四旋翼飞行器是一种能够垂直起降的多旋翼飞行器,它非常适合近地侦察、监视的任务,具有广泛的军事和民事应用前景。本文根据对四旋翼飞行器的机架结构和动力学特性做详尽的分析和研究,在此基础上建立四旋翼飞行器的动力学模型。四旋翼飞行器有各种的运行状态,比如:爬升、下降、悬停、滚转运动、俯仰运动、偏航运动等。本文采用动力学模型来描述四旋翼飞行器的飞行姿态。在上述研究和分析的基础上,进行飞行器的建模。动力学建模是通过对飞行器的飞行原理和各种运动状态下的受力关系以及参考牛顿-欧拉模型建立的仿真模型,模型建立后在Matlab/simulink软件中进行仿真。 关键字:四旋翼飞行器,动力学模型,Matlab/simulink Modeling and Simulating for a quad-rotor aircraft ABSTRACT The quad-rotor is a VTOL multi-rotor aircraft. It is very fit for the kind of reconnaissance mission and monitoring task of near-Earth, so it can be used in a wide range of military and civilian applications. In the dissertation, the detailed analysis and research on the rack structure and dynamic characteristics of the laboratory four-rotor aircraft is showed in the dissertation. The dynamic model of the four-rotor aircraft areestablished. It also studies on the force in the four-rotor aircraft flight principles and course of the campaign to make the research and analysis. The four-rotor aircraft has many operating status, such as climbing, downing, hovering and rolling movement, pitching movement and yawing movement. The dynamic model is used to describe the four-rotor aircraft in flight in the dissertation. On the basis of the above analysis, modeling of the aircraft can be made. Dynamics modeling is to build models under the principles of flight of the aircraft and a variety of state of motion, and Newton - Euler model with reference to the four-rotor aircraft.Then the simulation is done in the software of Matlab/simulink. Keywords: Quad-rotor,The dynamic mode, Matlab/simulink
电机系统建模与分析大作业.doc
本科上机大作业报告 课程名称:电机系统建模与分析姓名: 学号: 学院: 专业: 指导教师: 提交日期:年月日
目录 一、作业目的 (2) 二、作业要求 (3) 三、解题思路 (3) 1.数学模型的建立 (3) 2.滞环PWM的产生 (4) 3.电枢电压的确定 (4) 4.电枢电流为负值时的处理方法 (4) 5.R UNGLE-K UTTA法的基本算式 (5) 四、仿真程序 (5) 1.主程序 (5) 2.调用程序 (8) 五、仿真结果及其分析 (9) 1.仿真结果 (9) 2.分析计算结果 (11) 3.计算结果影响因素 (11) 步长的影响 (11) 转动惯量的影响 (12) 电感的影响 (13) 4.改进控制策略以获得更好的转速控制性能(PID) (14) 1.主程序 (16) 2.调用程序 (18) 六、收获与体会 (18) 一、作业目的 1.熟悉永磁直流电动机及其调速系统的建模与仿真; 2.熟悉滞环控制的原理与实现方法; 3.熟悉Rungle-Kutta方法在仿真中的应用。
二、作业要求 一台永磁直流电动机及其控制系统如下图。直流电源Udc=200V;电机永磁励磁 f=1Wb, 电枢绕组电阻Rq=0.5ohm、电感Lq=0.05H;转子转动惯量J=0.002kgm2 ;系统阻尼转矩系数B=0.1Nm/(rad/s) ,不带负载;用滞环控制的方法进行限流保护,电流上限Ih=15A、Il 下限=14A;功率管均为理想开关器件;电机在t=0时刻开始运行,并给定阶跃(方波)转速命令,即,在0~0.2s是80rad/s,在0.2~0.4s是120rad/s,在0.4~0.6s是80rad/s如此反复,用滞环控制的方法进行转速调节(滞环宽度+/-2rad/s)。用四阶龙格-库塔求解电机的电流与转速响应。 三、解题思路 1.数学模型的建立 按电动机原则取正方向 即:
飞机各个系统的组成及原理
一、外部机身机翼结构系统 二、液压系统 三、起落架系统 四、飞机飞行操纵系统 五、座舱环境控制系统 六、飞机燃油系统 七、飞机防火系统 一、外部机身机翼结构系统 1、外部机身机翼结构系统组成:机身机翼尾翼 2、它们各自的特点和工作原理 1)机身 机身主要用来装载人员、货物、燃油、武器和机载设备,并通过它将机翼、尾翼、起落架等部件连成一个整体。在轻型飞机和歼击机、强击机上,还常将发动机装在机身内。 2)机翼 机翼是飞机上用来产生升力的主要部件,一般分为左右两个面。 机翼通常有平直翼、后掠翼、三角翼等。机翼前后缘都保持基本平直的称平直翼,机翼前缘和后缘都向后掠称后掠翼,机翼平面形状成三角形的称三角翼,前一种适用于低速飞机,后两种适用于高速飞机。近来先进飞机还采用了边条机翼、前掠机翼等平面形状。
左右机翼后缘各设一个副翼,飞行员利用副翼进行滚转操纵。 即飞行员向左压杆时,左机翼上的副翼向上偏转,左机翼升力下降;右机翼上的副翼下偏,右机翼升力增加,在两个机翼升力差作用下飞机向左滚转。为了降低起飞离地速度和着陆接地速度,缩短起飞和着陆滑跑距离,左右机翼后缘还装有襟翼。襟翼平时处于收上位置,起飞着陆时放下。 3)尾翼 尾翼分垂直尾翼和水平尾翼两部分。 1.垂直尾翼 垂直尾翼垂直安装在机身尾部,主要功能为保持飞机的方向平衡和操纵。 通常垂直尾翼后缘设有方向舵。飞行员利用方向舵进行方向操纵。当飞行员右蹬舵时,方向舵右偏,相对气流吹在垂尾上,使垂尾产生一个向左的侧力,此侧力相对于飞机重心产生一个使飞机机头右偏的力矩,从而使机头右偏。同样,蹬左舵时,方向舵左偏,机头左偏。某些高速飞机,没有独立的方向舵,整个垂尾跟着脚蹬操纵而偏转,称为全动垂尾。 2.水平尾翼 水平尾翼水平安装在机身尾部,主要功能为保持俯仰平衡和俯仰操纵。低速飞机水平尾翼前段为水平安定面,是不可操纵的,其后缘设有升降舵,飞行员利用升降舵进行俯仰操纵。即飞行员拉杆时,升降舵上偏,相对气流吹向水平尾翼时,水平尾翼产生
飞机速度控制系统matlab仿真
2015届毕业设计说明书 模拟飞机速度控制系统的分析与仿真 院、系:电气与信息工程学院 学生姓名: 指导教师:职称 专业:自动化 班级: 完成时间:2015年6月
摘要 此次设计研究的内容主要是围绕模拟飞机控制系统,利用自动控制原理中的多种方法分析该控制系统的性能,比如系统的稳定性,动态性能,静态性能以及它们之间的相互关系,并且运用MATLAB软件对该控制系统进行仿真,直观的分析系统参数对系统动态特性和稳态特性的影响,来知道参数调节,让系统具备良好的控制效果。 首先从时域角度出发,根据系统中各个环节的物理或者化学规律,得到系统的微分方程,由微分方程经过拉普拉斯变化解得系统的开环传递函数或者闭环传递函数,然后求解闭环特征方程的特征方程和特征根,零极点的分布以及劳斯判据来分析判断该系统的稳定性。对于一个稳定的系统,又有上升时间、超调量、峰值时间、调节时间和稳态误差这些指标来对比系统的性能。 其次根据系统的传递函数,设计相应的控制器,提高系统的性能。由于被控对象组成的闭环系统存在着静态误差,并且系统的调节时间比较长,超调量也不满足要求,所以根据系统的情况设计了PID控制器。在Matlab软件中仿真之后,系统的性能指标得到提升,验证了PID控制器的有效性。另外根据系统参数对系统性能指标的影响,将系统的阻尼比调节到最佳阻尼比0.707,进一步提升了系统的性能。 最后,根据系统中存在着参数不确定的情况,传统控制方法很难设计控制器对于所有的参数都适用,所以设计了模糊控制器。由于模糊控制器不需要控制对象的精确模型,所以设计的模糊控制器对于所有的参数都实现了很好的效果,大幅度的提升了系统的性能。 在分析的过程中,使用了计算机技术的MATLAB软件,该软件可以比较方便地得到系统的根轨迹图、阶跃响应图和频域分析的曲线,并且可以高效的对比系统各个参数对系统时域特性和频域特型的影响,通过这些对比,能够加深对控制系统的认识和理解,对于系统的学习有着很大的帮助。 关键词:模拟飞机控制;稳定性;模糊控制;MATLAB软件
直流无刷电机控制系统的建模与仿真
直流无刷电机控制系统的建模与仿真 发表时间:2018-08-16T16:29:01.997Z 来源:《电力设备》2018年第13期作者:徐峰赵燕 [导读] 摘要:直流无刷电机是一种以电子换相装置取代机械换相装置的新型电机,其既具有直流电动机的调速性能,同时又具有交流电机结构简单、运行可靠、维护方便等优点。 (北京动力机械研究所北京 100074) 摘要:直流无刷电机是一种以电子换相装置取代机械换相装置的新型电机,其既具有直流电动机的调速性能,同时又具有交流电机结构简单、运行可靠、维护方便等优点。可在高空稀薄条件下工作,广泛应用在要求大功率重量比、响应速度快、可靠性高的随动系统中,因此非常有必要对其进一步加强研究。基于此本文对直流无刷电机控制系统进行了建模和仿真。 关键词:直流无刷电机;控制系统;建模与仿真 1、前言 随着全控型电力电子器件(如IGBT、IGCT等)的出现和普及,以及微控制器技术的不断进步,交流传动技术迅速普及,各种类型的变频装置被广泛应用于交流传动的场合。各种交流电力电子变换器的广泛应用,不仅使得各类生产设备的调速驱动、电气传动的性能要求得以满足,而且可以使越来越宝贵的电能得以节省,有效增加社会效益。 2、直流无刷电机的基本原理 直流无刷电机因其具有高效率、高功率密度、易于维护等优点在近年来得到了越来越广泛的应用,而将直流无刷电机与矩阵式变换器结合组成的电力传动装置则具有两者的优点。直流无刷电机与传统的电机在工作原理和结构构造方面均存在着差异,因此需要分析直流无刷电机的结构组成和工作原理。 本文讨论的直流无刷电机的转子为永磁材料制成的,可称为永磁直流无刷电机。永磁直流无刷电机按驱动电流方式可分为方波驱动和正弦波驱动,按照控制方式可分为有位置传感器控制和无位置传感器控制。本文探讨的是永磁方波型直流无刷电动机,并采用有位置传感器的方式进行控制。 永磁方波型直流无刷电机的组成可分为电机本体、转子位置传感器以及控制电机各相分别导通的功率电子开关线路。因为有转子位置传感器执行判断位置的功能,再加上开关线路根据转子位置选择适宜的导通相,所以可以将直流无刷电机的换相方式看作为电子式换相,取代了传统直流电机利用电刷装置完成的机械换相方式。相六管全桥逆变器目前被较为广泛的应用于驱动直流无刷电机。 电机定子的三相绕组有两种联结方式:△形(三角形)和Y形(星形)。一般绕组常采用Y形联结,在这种联结方式下,三相绕组的导通方式则可分为两两导通和三三导通两种。两两导通方式是指在直流无刷电机运转的每一时刻三相全桥的六个开关管中都有两个开关管同时导通,也就是说直流无刷电机在每一时刻都有两相绕组是通电的,另一相悬空;当通电的两相改变时,称为换相。每隔1/6周期(即60 电角度)发生一次换相,而每次换相只有一个开关管状态发生变化另一开关管状态保持不变,因此一个周期内每个开关管都导通120 的电角度。 3、基于Matlab/simulink直流无刷电机控制系统模型的建立 直流无刷电机的MATLAB仿真框图,如图1所示。 3.3反电动势模块 在建模过程中,求取反电动势是一项比较困难的工作,常用的方法有:分段线性法、有限元法和傅里叶变换法。分段线性法是将一个360°的运行周期分为6个阶段,每一个阶段为60°,根据转速和转子位置两个信号,确定电机所处的运行状态,并可以用直线方程来表示,通过直线方程即可求得反电动势波形,此种方法能够较好的满足建模仿真的设计要求。编写反电动势模块主要是利用S函数中的md-
(论文)模拟飞机速度控制系统matlab仿真毕业设计说明书[精选整理]
(论文)模拟飞机速度控制系统matlab仿真毕业设计说明书[精选整理]
2015届毕业设计说明书 模拟飞机速度控制系统的分析与仿真 院、系:电气与信息工程学院 学生姓名: 指导教师:职称 专业:自动化 班级: 完成时间:2015年6月
摘要 此次设计研究的内容主要是围绕模拟飞机控制系统,利用自动控制原理中的多种方法分析该控制系统的性能,比如系统的稳定性,动态性能,静态性能以及它们之间的相互关系,并且运用MATLAB软件对该控制系统进行仿真,直观的分析系统参数对系统动态特性和稳态特性的影响,来知道参数调节,让系统具备良好的控制效果。 首先从时域角度出发,根据系统中各个环节的物理或者化学规律,得到系统的微分方程,由微分方程经过拉普拉斯变化解得系统的开环传递函数或者闭环传递函数,然后求解闭环特征方程的特征方程和特征根,零极点的分布以及劳斯判据来分析判断该系统的稳定性。对于一个稳定的系统,又有上升时间、超调量、峰值时间、调节时间和稳态误差这些指标来对比系统的性能。 其次根据系统的传递函数,设计相应的控制器,提高系统的性能。由于被控对象组成的闭环系统存在着静态误差,并且系统的调节时间比较长,超调量也不满足要求,所以根据系统的情况设计了PID控制器。在Matlab软件中仿真之后,系统的性能指标得到提升,验证了PID控制器的有效性。另外根据系统参数对系统性能指标的影响,将系统的阻尼比调节到最佳阻尼比0.707,进一步提升了系统的性能。 最后,根据系统中存在着参数不确定的情况,传统控制方法很难设计控制器对于所有的参数都适用,所以设计了模糊控制器。由于模糊控制器不需要控制对象的精确模型,所以设计的模糊控制器对于所有的参数都实现了很好的效果,大幅度的提升了系统的性能。 在分析的过程中,使用了计算机技术的MATLAB软件,该软件可以比较方便地得到系统的根轨迹图、阶跃响应图和频域分析的曲线,并且可以高效的对比系统各个参数对系统时域特性和频域特型的影响,通过这些对比,能够加深对控制系统的认识和理解,对于系统的学习有着很大的帮助。 关键词:模拟飞机控制;稳定性;模糊控制;MATLAB软件
自动飞行控制系统电子讲稿第一部分
学习情景1 课程导论 1.飞行控制系统发展概述 自动飞行控制系统已有100多年的研制历史,早在有人驾驶飞机出现之前,自动飞行装置即已出现。 1.1方向稳定器 1873年,法国雷纳德(C.C.Renard)无人多翼滑翔机的方向稳定器。 1.2 电动陀螺稳定装置-姿态稳定 1914年,美国的爱莫尔·斯派雷(Eimer Sperry)研制成功第一台可以保持飞机稳定平飞的电动陀螺稳定装置,该装置利用陀螺的稳定性和进动性,建立一个测量基准,用来测量飞机的姿态,它和飞机的控制装置连在一起,一旦飞机偏离指定的状态,这个机构就通过飞机的控制装置操纵飞机的舵面偏转使飞机恢复到原来的状态。 1.3 自动驾驶仪 20世纪30年代出现了可以控制和保持飞机高度、速度和航迹的自动驾驶仪。 第二次世界大战促使自动驾驶仪等设备得到进一步发展,由过去气动-液压到全电动,由三个陀螺分别控制三个通道改用一个 或两个陀螺来操纵飞机,并可作机动、爬高及自动保持高度等。 二次大战期间,美国和原苏联相继研制出功能较完善的电气式自动驾驶仪C-1和其仿制品A∏-5; 德国在二战后期研制成功飞航式导弹V-1和弹道式导弹V-2,
更进一步促进了飞行自动控制装置的研制和发展。 20世纪50年代后,和导航系统、仪表着陆系统相联,自动驾驶装置实现了长距离自动飞行和自动着陆。 1.4 自动飞行控制系统 1947年成功突破音障后,飞机的飞行包线(飞行速度和高度的变化范围)扩大,越来越复杂的飞行任务对飞机性能的要求也越来越高,仅靠气动布局和发动机设计所获得的飞机性能已经很难满足复杂飞行任务的要求。因此,借助于自动控制技术来改善飞机稳定性的飞行自动控制装置(如增稳系统)相继问世,在此基础上,自动驾驶仪的功能得到进一步的扩展,发展成为自动飞行控制系统(AFCS)。 20世纪60年代,产生了随控布局飞行器(congtrol configured vehicle--CCV)的设计思想。 20世纪60年代前的以模拟电路或模拟计算机为主要计算装置的飞行控制系统,逐渐发展成为现在已普遍应用的数字式飞行控制系统,这也为新技术应用和更复杂更完善系统的综合提供了实现的可能性。例如: 主动控制技术(active control technology—ACT); 余度技术 容错控制技术 20世纪80年代得到迅速发展的火/推/飞综合控制系统等。 20世纪70年代中期,由于计算机的应用使自动驾驶仪和飞机的指引系统组成一个综合系统,使飞机的各种传感器数据、指
基于simulink异步电动机矢量控制系统的仿真
基于simulink异步电动机矢量控制系统的仿真 由于交流异步电动机属于一个高阶、非线性、多变量、强耦合系统。数学模型比较复杂,将其简化成单变量线性系统进行控制,达不到理想性能。为了实现高动态性能,提出了矢量控制的方法。所谓矢量控制就是采用坐标变换的方法,以产生相同的旋转磁势和变换后功率不变为准则,建立三相交流绕组、两相交流绕组和旋转的直流绕组三者之间的等效关系,从而求出异步电动机绕组等效的直流电机模型,以便按照对直流电机的控制方法对异步电动机进行控制。因此,它可以实现对电机电磁转矩的动态控制,优化调速系统的性能。 Matlab是一种面向工程计算的高级语言,其Simulink环境是一种优秀的系统仿真工具软件,使用它可以大大提高系统仿真的效率和可靠性。本文在此基础上构造了一个矢量控制的交流电机矢量控制调速系统,包含了给定、PI调节器、函数运算、二相/三相坐标变换、PWM脉冲发生器等环节,并给出了仿真结果。 1.异步电动机的动态数学模型 异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。在研究异步电动机的多变量非线性数学模型时,常作如下的假设: 1)忽略空间谐波,设三相绕组对称,在空间中互差120°电角度,所产生的磁动势沿气隙周围按正弦规律分布。 2)忽略励磁饱和,认为各绕组的自感和互感都是恒定的。 3)忽略铁心损耗。 4)不考虑频率变化和温度变化对绕组的影响。 无论电动机转子是绕线形还是笼形,都将它等效成三相绕线转子,并折算到定子侧,折算后的定子和转子绕组匝数都相等。这样,电机绕组就等效成图1所示的三相异步电动机的物理模型。图中,定子三相绕组轴线A、B、C在空间是固定的,以A轴为参考坐标轴;转子绕组轴线a、b、c随转子旋转,转子a轴和定子A轴间的电角度 为空间角位移变量。规定各绕组电压、电流、磁链的正方向符合电动机惯例和右手螺旋定则。这时,异步电动机的数学模型由下述电压方程、磁链方程、转矩方程和运动方程组成。 图1 三相异步电动机的物理模型 三相定子的电压方程可表示为:
电机系统建模与分析大作业
课程名称:电机系统建模与分析姓名: 学号: 学院: 专业: 指导教师: 提交日期:年月日
目录 一、作业目的 (2) 二、作业要求 (3) 三、解题思路 (3) 1.数学模型的建立 (3) 2.滞环PWM的产生 (4) 3.电枢电压的确定 (4) 4.电枢电流为负值时的处理方法 (4) 5.R UNGLE-K UTTA法的基本算式 (5) 四、仿真程序 (5) 1.主程序 (5) 2.调用程序 (8) 五、仿真结果及其分析 (9) 1.仿真结果 (9) 2.分析计算结果 (11) 3.计算结果影响因素 (11) 步长的影响 (11) 转动惯量的影响 (12) 电感的影响 (13) 4.改进控制策略以获得更好的转速控制性能(PID) (14) 1.主程序 (16) 2.调用程序 (18) 六、收获与体会 (18) 一、作业目的 1.熟悉永磁直流电动机及其调速系统的建模与仿真; 2.熟悉滞环控制的原理与实现方法; 3.熟悉Rungle-Kutta方法在仿真中的应用。
二、作业要求 一台永磁直流电动机及其控制系统如下图。直流电源Udc=200V;电机永磁励磁 f=1Wb, 电枢绕组电阻Rq=0.5ohm、电感Lq=0.05H;转子转动惯量J=0.002kgm2 ;系统阻尼转矩系数B=0.1Nm/(rad/s) ,不带负载;用滞环控制的方法进行限流保护,电流上限Ih=15A、Il 下限=14A;功率管均为理想开关器件;电机在t=0时刻开始运行,并给定阶跃(方波)转速命令,即,在0~0.2s是80rad/s,在0.2~0.4s是120rad/s,在0.4~0.6s是80rad/s如此反复,用滞环控制的方法进行转速调节(滞环宽度+/-2rad/s)。用四阶龙格-库塔求解电机的电流与转速响应。 三、解题思路 1.数学模型的建立 按电动机原则取正方向 即:
基于MATLAB_SIMULINK的电液伺服控制系统的建模与仿真研究
基于MATLAB /SIMULINK 的电液伺服控制 系统的建模与仿真研究 胡良谋,李景超,曹克强 (空军工程大学工程学院一系,陕西省西安市710038电话:(029)4397520) 摘要:利用MATLAB 软件中的动态仿真工具SIMULINK 建立了电液伺服控制系统仿真模型。通过实例对飞机上常用的电液位置伺服系统进行仿真,给出仿真结果,并详细地进行性能分析和研究。 关键词:电液伺服控制系统;舵机;电液位置伺服系统;仿真;MATLAB /SIMULINK 中图分类号:TP271+.31 文献标识码:A 文章编号:1001-3881(2003)3-230-2 !引言 电液伺服控制系统多数具有良好的控制性能,并 具有一定的鲁棒性,因此在现代飞机上得到了广泛的应用,例如,舵机、机轮刹车、进气道及尾喷管控制 等[5] 。利用计算机对其进行仿真,无论对其性能分析, 还是系统辅助设计,都有重要的意义。因此,电液伺服控制系统的仿真一直是我们研究的重点。文献[3]对液压系统的模拟、数字仿真作了详细的论述。本文利用MATLAB 软件中的动态仿真工具SIMULINK ,构造了电液伺服控制系统仿真模型,对其进行仿真。然后通过飞机上常用的用于舵面操纵及控制的电液位置伺服系统的实例进行仿真,并详细地对其进行系统性能分析。" 电液伺服控制系统的数学模型和方块图 ["][#][$] 电液伺服控制系统根据被控物理量(即输出量)分为电液位置伺服系统、电液速度伺服系统、电液力伺服控制系统三类。 本文主要介绍飞机上常用的用于舵面操纵及控制的电液位置伺服系统。典型的电液位置伺服系统方块图如图1所示:其中: U r -输入指令(V );F L -外负载力(N );!h -伺服系统的液压阻尼比,无因次; K f -反馈电位器增益(V /m );K a —伺服放大器增益 (A /V ); "a —线圈转折频率 (rad /S );K 1-电液伺服阀流量增益(m 3/A ?S ) ; 图1典型的电液位置伺服系统方块图 "1—电液伺服阀固有频率(rad /S );!1-电液伺服阀阻 尼比,无因次;A -液压缸油腔有效工作面积(m 2);"h -伺服系统的液压固有频率(rad /S ); K -油液的有效体积弹性模量(N /m 2);V t -液压缸油腔总容积(m 3); K ce -伺服系统的流量-压力系数(m 5/(W ?S ))。# 电液伺服控制系统的仿真模型 电液伺服控制系统的仿真模型可应用MATLAB 的 仿真工具箱SIMULINK 完成[4] 。由图1的典型的电液位置伺服系统的方块图,应用SIMULINK 建立的仿真模型如图2 所示。 图2典型的电液位置伺服系统SIMULINK 仿真模型 其中图2中的MATLAB 变量与图1中的数学模型 中参数对应关系如下: K a —K a ;wa —"a ;wV —"V ;ZV —!V ;A —A ;wh — w h ;Zh —!h ; KV —K V ;Kf —I f ;FL —F L ;Kce —K ce ;Vt —V t ;K —K 。 ? !"#?《机床与液压》2003.NO.3