集成电路原理第四章作业
第四章习题
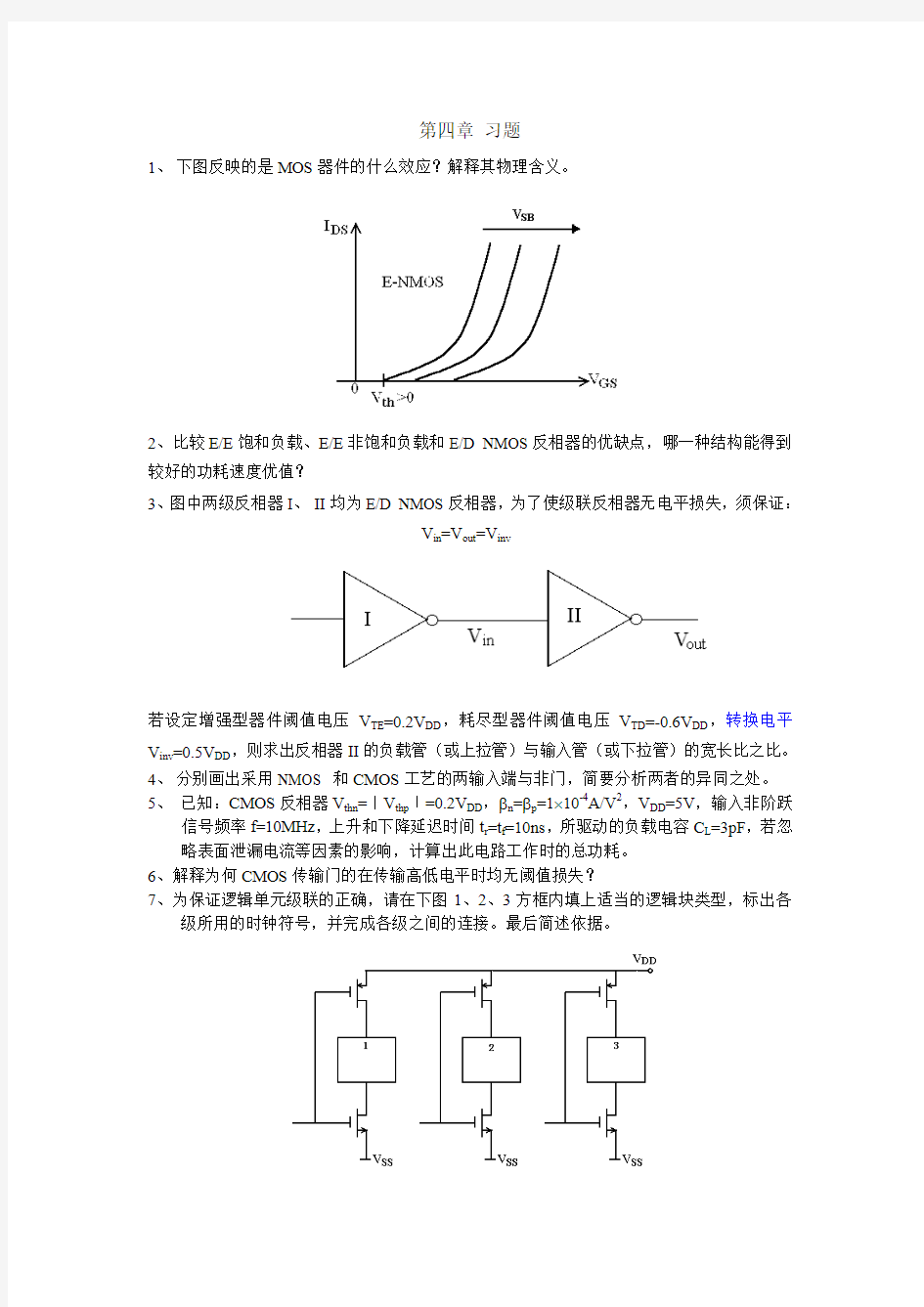
1、下图反映的是MOS器件的什么效应?解释其物理含义。
2、比较E/E饱和负载、E/E非饱和负载和E/D NMOS反相器的优缺点,哪一种结构能得到较好的功耗速度优值?
3、图中两级反相器I、II均为E/D NMOS反相器,为了使级联反相器无电平损失,须保证:
V in=V out=V inv
若设定增强型器件阈值电压V TE=0.2V DD,耗尽型器件阈值电压V TD=-0.6V DD,转换电平V inv=0.5V DD,则求出反相器II的负载管(或上拉管)与输入管(或下拉管)的宽长比之比。
4、分别画出采用NMOS 和CMOS工艺的两输入端与非门,简要分析两者的异同之处。
5、已知:CMOS反相器V thn=|V thp∣=0.2V DD,βn=βp=1?10-4A/V2,V DD=5V,输入非阶跃
信号频率f=10MHz,上升和下降延迟时间t r=t f=10ns,所驱动的负载电容C L=3pF,若忽略表面泄漏电流等因素的影响,计算出此电路工作时的总功耗。
6、解释为何CMOS传输门的在传输高低电平时均无阈值损失?
7、为保证逻辑单元级联的正确,请在下图1、2、3方框内填上适当的逻辑块类型,标出各
级所用的时钟符号,并完成各级之间的连接。最后简述依据。
计算机组成原理第四章作业答案
第四章作业答案 解释概念:主存、辅存,Cache, RAM, SRAM, DRAM, ROM, PROM ,EPROM ,EEPROM CDROM, Flash Memory. 解:1主存:主存又称为内存,直接与CPU交换信息。 2辅存:辅存可作为主存的后备存储器,不直接与CPU交换信息,容量比主存大,速度比主存慢。 3 Cache: Cache缓存是为了解决主存和CPU的速度匹配、提高访存速度的一种存储器。它设在主存和CPU之间,速度比主存快,容量比主存小,存放CPU最近期要用的信息。 4 RAM; RAM是随机存取存储器,在程序的执行过程中既可读出信息又可写入信息。 5 SRAM: 是静态RAM,属于随机存取存储器,在程序的执行过程中既可读出信息又可写入信息。靠触发器原理存储信息,只要不掉电,信息就不会丢失。 6 DRAM 是动态RAM,属于随机存取存储器,在程序的执行过程中既可读出信息又可写入信息。靠电容存储电荷原理存储信息,即使电源不掉电,由于电容要放电,信息就会丢失,故需再生。 7 ROM: 是只读存储器,在程序执行过程中只能读出信息,不能写入信息。 8 PROM: 是可一次性编程的只读存储器。 9 EPROM 是可擦洗的只读存储器,可多次编程。 10 EEPROM: 即电可改写型只读存储器,可多次编程。 11 CDROM 即只读型光盘存储器。 12 Flash Memory 即可擦写、非易失性的存储器。 存储器的层次结构主要体现在什么地方?为什么要分这些层次?计算机如何管理这些层次? 答:存储器的层次结构主要体现在Cache—主存和主存—辅存这两个存储层次上。 Cache—主存层次在存储系统中主要对CPU访存起加速作用,即从整体运行的效果分析,CPU访存速度加快,接近于Cache的速度,而寻址空间和位价却接近于主存。 主存—辅存层次在存储系统中主要起扩容作用,即从程序员的角度看,他所使用的存储器其容量和位价接近于辅存,而速度接近于主存。 综合上述两个存储层次的作用,从整个存储系统来看,就达到了速度快、容量大、位价低的优化效果。 主存与Cache之间的信息调度功能全部由硬件自动完成。而主存—辅存层次的调度目前广泛采用虚拟存储技术实现,即将主存与辅存的一部份通过软硬结合的技术组成虚拟存储器,程序员可使用这个比主存实际空间(物理地址空间)大得多的虚拟地址空间(逻辑地址空间)编程,当程序运行时,再由软、硬件自动配合完成虚拟地址空间与主存实际物理空间的转换。因此,这两个层次上的调度或转换操作对于程序员来说都是透明的。
《电路原理》作业及答案
第一章“电路模型和电路定律”练习题 1-1说明题1-1图(a)、(b)中:(1)u、i的参考方向是否关联?(2)ui乘积表示什么功率? (3)如果在图(a)中u>0、i<0;图(b)中u>0、i>0,元件实际发出还是吸收功率? i u- + 元件 i u- + 元件 (a)(b) 题1-1图 1-4 在指定的电压u和电流i的参考方向下,写出题1-4图所示各元件的u和i的约束方程(即VCR)。 i u- + 10kΩi u- + 10Ωi u- + 10V - + (a)(b)(c) i u- + 5V + -i u- + 10mA i u- + 10mA (d)(e)(f) 题1-4图 1-5 试求题1-5图中各电路中电压源、电流源及电阻的功率(须说明是吸收还是发出)。
15V + - 5Ω 2A 15V +-5Ω 2A 15V + - 5Ω2A (a ) (b ) (c ) 题1-5图 1-16 电路如题1-16图所示,试求每个元件发出或吸收的功率。 0.5A 2U +- 2ΩU + - I 2Ω1 2V + - 2I 1 1Ω (a ) (b ) 题1-16图 A I 2
1-20 试求题1-20图所示电路中控制量u 1及电压u 。 ++2V - u 1 - +- u u 1 + - 题1-20图
第二章“电阻电路的等效变换”练习题 2-1电路如题2-1图所示,已知u S=100V,R1=2kΩ,R2=8kΩ。试求以下3种情况下的电压 u 2 和电流 i2、i3:(1)R3=8kΩ;(2)R3=∞(R3处开路);(3)R3=0(R3处短路)。 u S + - R 2 R 3 R 1 i 2 i 3 u 2 + - 题2-1图
计算机组成原理第五版 白中英(详细)第4章习题参考答案
第4章习题参考答案 1.ASCII码是7位,如果设计主存单元字长为32位,指令字长为12位,是否合理?为什么? 答:不合理。指令最好半字长或单字长,设16位比较合适。一个字符的ASCII 是7位,如果设计主存单元字长为32位,则一个单元可以放四个字符,这也是可以的,只是在存取单个字符时,要多花些时间而已,不过,一条指令至少占一个单元,但只占一个单元的12位,而另20位就浪费了,这样看来就不合理,因为通常单字长指令很多,浪费也就很大了。 2.假设某计算机指令长度为32位,具有双操作数、单操作数、无操作数三类指令形式,指令系统共有70条指令,请设计满足要求的指令格式。 答:字长32位,指令系统共有70条指令,所以其操作码至少需要7位。 双操作数指令 单操作数指令 无操作数指令 3.指令格式结构如下所示,试分析指令格式及寻址方式特点。 答:该指令格式及寻址方式特点如下: (1) 单字长二地址指令。 (2) 操作码字段OP可以指定26=64种操作。 (3) 源和目标都是通用寄存器(可分指向16个寄存器)所以是RR型指令,即两个操作数均在寄存器中。 (4) 这种指令结构常用于RR之间的数据传送及算术逻辑运算类指令。 4.指令格式结构如下所示,试分析指令格式及寻址方式特点。 15 10 9 8 7 4 3 0 答:该指令格式及寻址方式特点如下: (1)双字长二地址指令,用于访问存储器。 (2)操作码字段OP可以指定26=64种操作。 (3)RS型指令,一个操作数在通用寄存器(选择16个之一),另一个操作数 在主存中。有效地址可通过变址寻址求得,即有效地址等于变址寄存器(选择16个之一)内容加上位移量。
电路理论基础第四版 孙立山 陈希有主编 第4章习题答案详解
教材习题4答案部分(p126) 答案4.1 解:将和改写为余弦函数的标准形式,即 2 3 4c o s (190)A 4c o s (190180)A 4c o s (10)A 5s i n (10)A 5c o s (1090)A 5c o s (80)A i t t t i t t t ωωωωωω =-+?=+?-?=+?=+?=+?-?=-? 电压、电流的有效值为 123100270.7V , 1.414A 22 452.828A , 3.54A 22 U I I I ======== 初相位 1 2 3 10,100,10,80u i i i ψψψψ====- 相位差 1 1 1010090u i ?ψψ=-=-=- 1 1 u i u i 与正交,滞后于; 2 2 10100u i ?ψψ=-=?-?= u 与同相; 3 3 10(80)90u i ?ψψ=-=?--?= u 与正交,u 超前于 答案4.2 ()()()(). 2222a 10c o s (10)V -8 b 610a r c t g 10233.1V ,102c o s (233.1)V -6 -20.8c 0.220.8a r c t g 20.889.4A ,20.8c o s (89.4)A 0.2 d 30180A ,302c o s (180)A m u t U u t I i t I i t ωωωω= -?=+∠=∠?=+?=+∠=∠-?=-?=∠?=+? 答案6.3 解:(a)利用正弦量的相量表示法的线性性质得: 1 122 1,U I n U I n ==- (b)磁通相量通常用最大值表示,利用正弦量的相量表示法的微分性质得: m j m U N ω=Φ (c) 利用正弦量的相量表示法的线性性质与微分性质得:
集成电路工艺原理(期末复习资料)
第一章 1、何为集成电路:通过一系列特定的加工工艺,将晶体管、二极管等有源器件和电阻、 电容等无源器件,按照一定的电路互连,“集成”在一块半导体单晶片(如Si、GaAs)上,封装在一个内,执行特定电路或系统功能。 关键尺寸:集成电路中半导体器件能够加工的最小尺寸。 2、它是衡量集成电路设计和制造水平的重要尺度,越小,芯片的集成度越高,速度越 快,性能越好 3、摩尔定律:、芯片上所集成的晶体管的数目,每隔18个月就翻一番。 4、High-K材料:高介电常数,取代SiO2作栅介质,降低漏电。 Low-K 材料:低介电常数,减少铜互连导线间的电容,提高信号速度 5、功能多样化的“More Than Moore”指的是用各种方法给最终用户提供附加价值,不 一定要缩小特征尺寸,如从系统组件级向3D集成或精确的封装级(SiP)或芯片级(SoC)转移。 6、IC企业的分类:通用电路生产厂;集成器件制造;Foundry厂;Fabless:IC 设计公 司;Chipless;Fablite 第二章:硅和硅片的制备 7、单晶硅结构:晶胞重复的单晶结构能够制作工艺和器件特性所要求的电学和机械性 能 8、CZ法生长单晶硅把熔化的半导体级硅液体变成有正确晶向并且被掺杂成n或p型 的固体硅锭; 9、直拉法目的:实现均匀掺杂和复制籽晶结构,得到合适的硅锭直径,限制杂质引入; 关键参数:拉伸速率和晶体旋转速度 10、CMOS (100)电阻率:10~50Ω?cm BJT(111)原因是什么? 11、区熔法?纯度高,含氧低;晶圆直径小。 第三章集成电路制造工艺概况 12、亚微米CMOS IC 制造厂典型的硅片流程模型 第四章氧化;氧化物 12、热生长:在高温环境里,通过外部供给高纯氧气使之与硅衬底反应,得到一层热生长的SiO2 。 13、淀积:通过外部供给的氧气和硅源,使它们在腔体中方应,从而在硅片表面形成一层薄膜。 14、干氧:Si(固)+O2(气)-> SiO2(固):氧化速度慢,氧化层干燥、致密,均匀性、重复性好,与光刻胶的粘附性好. 水汽氧化:Si (固)+H2O (水汽)->SiO2(固)+ H2 (气):氧化速度快,氧化层疏松,均匀性差,与光刻胶的粘附性差。 湿氧:氧气携带水汽,故既有Si与氧气反应,又有与水汽反应。氧化速度氧化质量介于以上两种方法之间。
《机械原理》(于靖军版)第4章习题答案
《机械原理》(于靖军版)第4章习题答案
讨论题与习题 习题 4-1 试求出题图4-1所示的各机构的全部瞬心。 1 2 3 4 (a)正切机构 (b)凸轮机构 1 2 3 题图4-1 解: 4-2 在题图4-2所示的凸轮机构中,若已知凸轮2以等角速度顺时针转动,试求从动件上点B 的速度。假设构件3在2上作纯滚动,求点B'的速度。 1 2 1 B' 3 4 B O O 2 题图4-2 解:
B O 2 P 13 P 12 P 24B' O 1 3 ω1 ω1 3 2 由13 113213 l l 31P O P O P V ?=?=ωω B O B V 1l 3?=ω 可得: B O P O P O B V 113113 2l l l 1??=ω 12 2412 212 l l 21P P P O P V ?=?=ωω ' 24' l 2B P B V ?=ω 可得:12 2412 2' 24' l l l 1P P P O B P B V ?? =ω 4-3 在题图4-3所示的机构中,已知曲柄1顺时针方向匀速转动,角速度ω1=100rad/s ,试求在图示位置导杆3的角速度ω3的大小和方向。 3 B 4C 12A 题图4-3 解: 因已知曲柄2的运动,而所求构件4的运动,所以要求取构件2和4的瞬心24 P 。根据瞬心的性质,得14 244 12 242 24 P P P P P ωωω==
所以14 2412242 4P P P P ωω= 方向顺时针运动。 4-4 在题图4-4所示的机构中,已知:图示机构的尺寸,原动件1以匀角速度ω1沿逆时针方向转动。试确定:(1)在图上标出机构的全部瞬心;(2)用瞬心法确定点M 的速度v M ,需写出表达式,并标出速度的方向。 1 2 3 4 M ω1 题图4-4 解: 1 2 1 ω P 12 P 14 P 24 P 34 M P 23 P 13 ∞ 3 121412 2412 l l 12P P P P P V ?=?=ωω M P P P P P M P M V 2412 24121424l l l l 12??=?=ωω 4-5 在题图4-5所示的机构中,已知:图示机构的尺寸,原动件1以匀角速度ω1沿顺时针方向转
电子科技大学集成电路原理实验CMOS模拟集成电路设计与仿真王向展
实验报告 课程名称:集成电路原理 实验名称: CMOS模拟集成电路设计与仿真 小组成员: 实验地点:科技实验大楼606 实验时间: 2017年6月12日 2017年6月12日 微电子与固体电子学院
一、实验名称:CMOS模拟集成电路设计与仿真 二、实验学时:4 三、实验原理 1、转换速率(SR):也称压摆率,单位是V/μs。运放接成闭环条件下,将一个阶跃信号输入到运放的输入端,从运放的输出端测得运放的输出上升速率。 2、开环增益:当放大器中没有加入负反馈电路时的放大增益称为开环增益。 3、增益带宽积:放大器带宽和带宽增益的乘积,即运放增益下降为1时所对应的频率。 4、相位裕度:使得增益降为1时对应的频率点的相位与-180相位的差值。 5、输入共模范围:在差分放大电路中,二个输入端所加的是大小相等,极性相同的输入信号叫共模信号,此信号的范围叫共模输入信号范围。 6、输出电压摆幅:一般指输出电压最大值和最小值的差。 图 1两级共源CMOS运放电路图 实验所用原理图如图1所示。图中有多个电流镜结构,M1、M2构成源耦合对,做差分输入;M3、M4构成电流镜做M1、M2的有源负载;M5、M8构成电流镜提供恒流源;M8、M9为偏置电路提供偏置。M6、M7为二级放大电路,Cc为引入的米勒补偿电容。 其中主要技术指标与电路的电气参数及几何尺寸的关系:
转换速率:SR=I5 I I 第一级增益:I I1=?I I2 I II2+I II4=?2I I1 I5(I2+I3) 第二级增益:I I2=?I I6 I II6+I II7=?2I I6 I6(I6+I7) 单位增益带宽:GB=I I2 I I 输出级极点:I2=?I I6 I I 零点:I1=I I6 I I 正CMR:I II,III=I II?√5 I3 ?|I II3|(III)+I II1,III 负CMR:I II,III=√I5 I1+I II5,饱和 +I II1,III+I II 饱和电压:I II,饱和=√2I II I 功耗:I IIII=(I8+I5+I7)(I II+I II) 四、实验目的 本实验是基于微电子技术应用背景和《集成电路原理与设计》课程设置及其特点而设置,为IC设计性实验。其目的在于: 根据实验任务要求,综合运用课程所学知识自主完成相应的模拟集成电路设计,掌握基本的IC设计技巧。 学习并掌握国际流行的EDA仿真软件Cadence的使用方法,并进行电路的模拟仿真。 五、实验内容 1、根据设计指标要求,针对CMOS两级共源运放结构,分析计算各器件尺寸。 2、电路的仿真与分析,重点进行直流工作点、交流AC和瞬态Trans分析,能熟练掌握各种分析的参数设置方法与仿真结果的查看方法。 3、电路性能的优化与器件参数调试,要求达到预定的技术指标。
组成原理作业答案
第一章计算机系统概论 5. 冯?诺依曼计算机的特点是什么? 解:冯?诺依曼计算机的特点是:P8 ●计算机由运算器、控制器、存储器、输入设备、输出设备五大部件组成; ●指令和数据以同同等地位存放于存储器内,并可以按地址访问; ●指令和数据均用二进制表示; ●指令由操作码、地址码两大部分组成,操作码用来表示操作的性质,地址码用来表 示操作数在存储器中的位置; ●指令在存储器中顺序存放,通常自动顺序取出执行; ●机器以运算器为中心(原始冯?诺依曼机)。 7. 解释下列概念: 主机、CPU、主存、存储单元、存储元件、存储基元、存储元、存储字、存储字长、存储容量、机器字长、指令字长。 解:P9-10 主机:是计算机硬件的主体部分,由CPU和主存储器MM合成为主机。 CPU:中央处理器,是计算机硬件的核心部件,由运算器和控制器组成;(早期的运算器和控制器不在同一芯片上,现在的CPU内除含有运算器和控制器外还集成了CACHE)。 主存:计算机中存放正在运行的程序和数据的存储器,为计算机的主要工作存储器,可随机存取;由存储体、各种逻辑部件及控制电路组成。 存储单元:可存放一个机器字并具有特定存储地址的存储单位。 存储元件:存储一位二进制信息的物理元件,是存储器中最小的存储单位,又叫存储基元或存储元,不能单独存取。 存储字:一个存储单元所存二进制代码的逻辑单位。 存储字长:一个存储单元所存二进制代码的位数。 存储容量:存储器中可存二进制代码的总量;(通常主、辅存容量分开描述)。 机器字长:指CPU一次能处理的二进制数据的位数,通常与CPU的寄存器位数有关。 指令字长:一条指令的二进制代码位数。 8. 解释下列英文缩写的中文含义: CPU、PC、IR、CU、ALU、ACC、MQ、X、MAR、MDR、I/O、MIPS、CPI、FLOPS 解:全面的回答应分英文全称、中文名、功能三部分。 CPU:Central Processing Unit,中央处理机(器),是计算机硬件的核心部件,主要由运算器和控制器组成。 PC:Program Counter,程序计数器,其功能是存放当前欲执行指令的地址,并可自动计数形成下一条指令地址。 IR:Instruction Register,指令寄存器,其功能是存放当前正在执行的指令。 CU:Control Unit,控制单元(部件),为控制器的核心部件,其功能是产生微操作命令序列。 ALU:Arithmetic Logic Unit,算术逻辑运算单元,为运算器的核心部件,其功能是进行算术、逻辑运算。 ACC:Accumulator,累加器,是运算器中既能存放运算前的操作数,又能存放运算结
机械原理课后答案第章
第2章 2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的? 答:参考教材5~7页。 2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征? 答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,而且也可用来进行动力分析。 2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况? 答:参考教材12~13页。 2-4 何谓最小阻力定律?试举出在机械工程中应用最小阻力定律的1、2个实例。 2-5 在计算平面机构的自由度时,应注意哪些事项? 答:参考教材15~17页。 2-6 在图2-20所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么? 答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。 2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。 2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么? 答:参考教材20~21页。 2-9 任选三个你身边已有的或能观察到的下列常用装置(或其他装置),试画出其机构运动简图,并计算其自由度。1)折叠桌或折叠椅;2)酒瓶软木塞开盖器;3)衣柜上的弹簧合页;4)可调臂台灯机构;5)剥线钳;6)磁带式录放音机功能键操纵机构;7)洗衣机定时器机构;8)轿车挡风玻璃雨刷机构;9)公共汽车自动开闭门机构;10)挖掘机机械臂机构;…。 2-10 请说出你自己身上腿部的髋关节、膝关节和踝关节分别可视为何种运动副?试画出仿腿部机构的机构运动简图,并计算其自由度。 2-11图示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮j输入,使轴A连续回转;而固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。 1)取比例尺绘制机构运动简图 2)分析是否能实现设计意图 解: 332410 f=?-?-=不合理∵0 f=,可改为 2-12图示机构为一凸轮齿轮连杆组合机构,试绘制其机构示意简图并计算自由度。 解: 2-16试计算图示凸轮-连杆组合机构的自由度 (a) 解: 342511 f=?-?-= A为复合铰链 (b) 解:(1)图示机构在D处的结构与图2-1所示者一致,经分析知该机构共有7个活动构件,8个低副(注意移动副F与F’,E与E’均只算作一个移动副),2个高副;因有两个滚子2、4,所以有两个局部自由度,没有虚约束,故机构的自由度为 F=3n- (2p l+p h- p’)- F’=3ⅹ7- (2ⅹ8+2-0)- 2=1 (2)如将D处结构改为如图b所示形式,即仅由两个移动副组成。注意,此时在该处将带来一个虚约束。因为构件3、6和构件5、6均组成移动副,均要限制构件6在图纸平面内转动,这两者是重复的,故其中有一个为虚约束。经分析知这时机构的活动构件数为6,低副数为7,高副数和局部自由度数均为2,虚约束数为1,故机构的自由度为 F=3n- (2p l+p h- p’)- F’ =3×6- (2ⅹ7+2-1)- 2=1 上述两种结构的机构虽然自由度均为一,但在性能上却各有千秋:前者的结构较复杂,但没有虚约
《集成电路原理及应用》课后答案..
集成电路原理及应用(第2版)谭博学苗汇静主编 课后习题答案 第二章 模拟集成电路的线性应用 对 A 2 :由"虚断”和"虚短”得 i 3=i 4, v 2_=v 2 - =u i2, 代入 U o1 得U 。哙呱…), 2.11 求图3所示电路的增益A f ,并说明该电路完成什么功能 则 u i1 = U 01 R 1 R 2 R 2 R 1 ,即 u o-(1 K )u i1 , 则 U 。1 -U i2 R 3 U i2 -U o R 4 R 3 因两个输入信号均从同相端输入, 所以输入阻抗比较高。该电路为高输入阻抗的差动放 2.9 试分析图1所示电路是什么电路,有何特点?图中设 解:第一级运放为同相放大器。对 A 1 :由"虚断”和"虚短”得 i 1 =i 2, v^=v 1. =u , 1)U i2 - U o1
解:该电路由两个集成运放构成, A1为主放大器接成反相运算放大器, A2为辅助放大器, A2也接成反相放大器,利用 A2对A1构成正反馈,是整个电路向信号源索取的电流极少。 主放大器A 1 :由“虚断”和“虚短”得 R i U i I i u i 01 u 。 R 2 R i R 2 u i u i 辅助放大器A2的电压放大倍数: o2 u o2 2R 1 该电路为自举电路, U i U i U i R i I i I i - I R 2 R 2 U i U i u i2 u 。 R 2 目的是提高电路的输入电阻。 2R 得 U^2U i RR
当 R = R 1 时,R t 2.12 求图4所示电路输出电压与输入电压的表达式,并说明该电路完成什么 功能 i1 -u o1 ,即u o1 =-u i1 。A 1为倒相器 解:对A 1 :由
模拟电路第四章课后习题测验答案
第四章 习题与思考题 ◆◆ 习题 4-1 在图P4-1所示互补对称电路中,已知V CC 为6V ,R L 为8Ω,假设三极管的饱和管压降U CES =1V , ① 试估算电路的最大输出功率P om ; ② 估算电路中直流电源消耗的功率P V 和效率η。 解:① W W R U V P L cem CC om 563.18 2)16(2)(2 2≈?-=-= 如忽略U CES ,则 W W R V P L CC om 25.28 2622 2=?=≈ ② W W R V P L CC V 865.28 6222 2≈??=≈ππ %55.54865 .2563.1≈==V om P P η 如忽略U CES ,则%53.78865.225.2≈== V om P P η 此题的意图是理解OCL 互补对称放大电路的P om 和P V 的估算方法。 ◆◆ 习题 4-2 在图P4-1所示的电路中: ① 三极管的最大功耗等于多少? ② 流过三极管的最大集电极电流等于多少? ③ 三极管集电极和发射极之间承受的最大电压等于多少? ④ 为了在负载上得到最大输出功率P om ,输入端应加上的正弦电压有效值大约等于多少? 解:① W W P P om CM 45.025.22.02.0=?=> ② A A R V I L CC CM 75.08 6==> ③ V V V U CC CEO BR 12622)(=?=> ④ 因为互补对称电路中无论哪个三极管导电,电路均工作在射极跟随器状态,1≈u A ,而略小于1,故V V V U U CC cem i 24.426 22≈=≈≈。 本题的意图是了解OCL 互补对称电路中功率三极管极限参数的估算方法。
计算机组成原理第四章作业答案(终板)
第四章作业答案 4.1 解释概念:主存、辅存,Cache, RAM, SRAM, DRAM, ROM, PROM ,EPROM ,EEPROM CDROM, Flash Memory. 解:1主存:主存又称为存,直接与CPU交换信息。 2辅存:辅存可作为主存的后备存储器,不直接与CPU交换信息,容量比主存大,速度比主存慢。 3 Cache: Cache缓存是为了解决主存和CPU的速度匹配、提高访存速度的一种存储器。它设在主存和CPU之间,速度比主存快,容量比主存小,存放CPU最近期要用的信息。 4 RAM; RAM是随机存取存储器,在程序的执行过程中既可读出信息又可写入信息。 5 SRAM: 是静态RAM,属于随机存取存储器,在程序的执行过程中既可读出信息又可写入信息。靠触发器原理存储信息,只要不掉电,信息就不会丢失。 6 DRAM 是动态RAM,属于随机存取存储器,在程序的执行过程中既可读出信息又可写入信息。靠电容存储电荷原理存储信息,即使电源不掉电,由于电容要放电,信息就会丢失,故需再生。 7 ROM: 是只读存储器,在程序执行过程中只能读出信息,不能写入信息。 8 PROM: 是可一次性编程的只读存储器。 9 EPROM 是可擦洗的只读存储器,可多次编程。 10 EEPROM: 即电可改写型只读存储器,可多次编程。 11 CDROM 即只读型光盘存储器。 12 Flash Memory 即可擦写、非易失性的存储器。 4.3 存储器的层次结构主要体现在什么地方?为什么要分这些层次?计算机如何管理这些层次? 答:存储器的层次结构主要体现在Cache—主存和主存—辅存这两个存储层次上。 Cache—主存层次在存储系统中主要对CPU访存起加速作用,即从整体运行的效果分析,CPU访存速度加快,接近于Cache的速度,而寻址空间和位价却接近于主存。 主存—辅存层次在存储系统中主要起扩容作用,即从程序员的角度看,他所使用的存储器其容量和位价接近于辅存,而速度接近于主存。 综合上述两个存储层次的作用,从整个存储系统来看,就达到了速度快、容量大、位价低的优化效果。 主存与Cache之间的信息调度功能全部由硬件自动完成。而主存—辅存层次的调度目前广泛采用虚拟存储技术实现,即将主存与辅存的一部份通过软硬结合的技术组成虚拟存储器,程序员可使用这个比主存实际空间(物理地址空间)大得多的虚拟地址空间(逻辑地址空间)编程,当程序运行时,再由软、硬件自动配合完成虚拟地址空间与主存实际物理空间的转换。因此,这两个层次上的调度或转换操作对于程序员来说都是透明的。
机械原理第4章习题答案
讨论题与习题 习题 4-1试求出题图4-1 所示的各机构的全部瞬心。 解: 4-2在题图4-2所示的凸轮机构中,若已知凸轮2以等角速度顺时针转动,试求从动件上点B的速度。假设构件3在2上作纯滚动,求点B'的速度。 4-3在题图4-3所示的机构中,已知曲柄1顺时针方向匀速转动,角速度1=100rad/s,试求在图示位置导杆3的角速度3的大小和方向。 解: 由 V p ◎12 3 l qP i3 V B3 l qB 可得:V B 1 l O2P13 l O1P13 l qB 2吩12 V B' 2 l p24B 可得:V B I P24B占 l P P
解: 因已知曲柄2的运动,而所求构件4的运动,所以要求取构件2和4的瞬心P24。根据瞬心的性 4-4所示的机构中,已 知:图示机构的尺寸, 1 )在图上标出机构 的全部瞬心; 原动件1以匀角速度i沿逆时针 (2 )用瞬心法确定点M的速度VM,需质,得P24 2 P24P12 4 P24P14 所以4 P24 R2 2 P24 R4 方向顺时针运 动。 解: 题图4-4 P4 P24 4-4在题图 方向转动。试确定:写出表达 式,并标出速度的方向。 题图4-3
P4M 1"P4P2 l B4P2 G M 4-5在题图4-5所示的机构中,已知: 方向转动。试确定:(1 )在图上标出机构的全部瞬心; 的角速度3,需写出表达式,并标出速度的方向。 图示机构的尺寸,原动件1以匀角速度1沿顺时针 2 )用瞬心法确定在此位置时构件 3 解:相应的瞬心和求解过程可以参考4—4,只需要利用V P13列出等式即可求解。 4-8在题图4-8所示是铰链四杆机构中,各杆件长度分别为 l AD=72mm 若取 min。 AD为机架,作图求该机构的极位夹角e,杆 l AB=28mm l Bc=70mm l cD=50mm CD的最大摆角和最小传动角 解: (1 )取比例尺 示。由图上量得 (2)由于I AB 题图4-8 i,画出机构的极限位置及传动角的极值位置图, 分别如图( 玄)和(b)所 13 71。 l AD l BC l CD,故存在曲柄。 又由于AB为最短杆,故机构演化为双曲柄机构, ( 另外,本题也可以利用三角形的边角关系求解具体数值。 C, D都是摆转 副。>但在计算 min的时候,要注意: . o min min min ,180 max max max max ,180 4-9已知一偏置曲柄滑块机构,如题图4-9所示。其中,曲柄长度偏距 e=10mm (1)画出滑块的两个极限位置;(2)标出极位夹角程速比系数 K; (4)标出并计算最小传动角min 。 min l AB=15mm 连杆l Bc=50mm 及行程H; (3)计算行
计算机组成原理第四章作业答案(终板)学习资料
计算机组成原理第四章作业答案(终板)
第四章作业答案 4.1 解释概念:主存、辅存,Cache, RAM, SRAM, DRAM, ROM, PROM ,EPROM ,EEPROM CDROM, Flash Memory. 解:1主存:主存又称为内存,直接与CPU交换信息。 2辅存:辅存可作为主存的后备存储器,不直接与CPU交换信息,容量比主存大,速度比主存慢。 3 Cache: Cache缓存是为了解决主存和CPU的速度匹配、提高访存速度的一种存储器。它设在主存和CPU之间,速度比主存快,容量比主存小,存放CPU最近期要用的信息。 4 RAM; RAM是随机存取存储器,在程序的执行过程中既可读出信息又可 写入信息。 5 SRAM: 是静态RAM,属于随机存取存储器,在程序的执行过程中既可读出信息又可写入信息。靠触发器原理存储信息,只要不掉电,信息就不会丢失。 6 DRAM 是动态RAM,属于随机存取存储器,在程序的执行过程中既可读出信息又可写入信息。靠电容存储电荷原理存储信息,即使电源不掉电,由于电容要放电,信息就会丢失,故需再生。 7 ROM: 是只读存储器,在程序执行过程中只能读出信息,不能写入信息。 8 PROM: 是可一次性编程的只读存储器。 9 EPROM 是可擦洗的只读存储器,可多次编程。 10 EEPROM: 即电可改写型只读存储器,可多次编程。 11 CDROM 即只读型光盘存储器。 12 Flash Memory 即可擦写、非易失性的存储器。
4.3 存储器的层次结构主要体现在什么地方?为什么要分这些层次?计算机如何管理这些层次? 答:存储器的层次结构主要体现在Cache—主存和主存—辅存这两个存储层次上。 Cache—主存层次在存储系统中主要对CPU访存起加速作用,即从整体运行的效果分析,CPU访存速度加快,接近于Cache的速度,而寻址空间和位价却接近于主存。 主存—辅存层次在存储系统中主要起扩容作用,即从程序员的角度看,他所使用的存储器其容量和位价接近于辅存,而速度接近于主存。 综合上述两个存储层次的作用,从整个存储系统来看,就达到了速度快、容量大、位价低的优化效果。 主存与Cache之间的信息调度功能全部由硬件自动完成。而主存—辅存层次的调度目前广泛采用虚拟存储技术实现,即将主存与辅存的一部份通过软硬结合的技术组成虚拟存储器,程序员可使用这个比主存实际空间(物理地址空间)大得多的虚拟地址空间(逻辑地址空间)编程,当程序运行时,再由软、硬件自动配合完成虚拟地址空间与主存实际物理空间的转换。因此,这两个层次上的调度或转换操作对于程序员来说都是透明的。
计算机组成原理作业讲解1-4章 答案
1.1 概述数字计算机的发展经过了哪几个代?各代的基本特征是什么? 略。 1.2 你学习计算机知识后,准备做哪方面的应用? 略。 1.3 试举一个你所熟悉的计算机应用例子。 略。 1.4 计算机通常有哪些分类方法?你比较了解的有哪些类型的计算机? 略。 1.5 计算机硬件系统的主要指标有哪些? 答:机器字长、存储容量、运算速度、可配置外设等。 答:计算机硬件系统的主要指标有:机器字长、存储容量、运算速度等。 1.6 什么是机器字长?它对计算机性能有哪些影响? 答:指CPU一次能处理的数据位数。它影响着计算机的运算速度,硬件成本、指令系统功能,数据处理精度等。 1.7 什么是存储容量?什么是主存?什么是辅存? 答:存储容量指的是存储器可以存放数据的数量(如字节数)。它包括主存容量和辅存容量。 主存指的是CPU能够通过地址线直接访问的存储器。如内存等。 辅存指的是CPU不能直接访问,必须通过I/O接口和地址变换等方法才能访问的存储器,如硬盘,u盘等。 1.8 根据下列题目的描述,找出最匹配的词或短语,每个词或短语只能使用一次。(1)为个人使用而设计的计算机,通常有图形显示器、键盘和鼠标。 (2)计算机中的核心部件,它执行程序中的指令。它具有加法、测试和控制其他部件的功能。 (3)计算机的一个组成部分,运行态的程序和相关数据置于其中。 (4)处理器中根据程序的指令指示运算器、存储器和I/O设备做什么的部件。 (5)嵌入在其他设备中的计算机,运行设计好的应用程序实现相应功能。 (6)在一个芯片中集成几十万到上百万个晶体管的工艺。 (7)管理计算机中的资源以便程序在其中运行的程序。 (8)将高级语言翻译成机器语言的程序。 (9)将指令从助记符号的形式翻译成二进制码的程序。 (10)计算机硬件与其底层软件的特定连接纽带。 供选择的词或短语: 1、汇编器 2、嵌入式系统 3、中央处理器(CPU) 4、编译器 5、操作系统 6、控制器 7、机器指令 8、台式机或个人计算机 9、主存储器10、VLSI 答:(1)8,(2)3,(3)9,(4)6,(5)2, (6)10,(7)5,(8)4,(9)1,(10)7 计算机系统有哪些部分组成?硬件由哪些构成? 答:计算机系统硬件系统和软件系统组成。 硬件由控制器、存储器、运算器、输入设备和输出设备五大部件构成 1.9 冯·诺伊曼V on Neumann计算机的主要设计思想是什么? 略。 1.10 计算机硬件有哪些部件,各部件的作用是什么?
第四章 正弦交流电路习题参考答案
t ω A i /A 2220 3 2πt ωA i /A 203 2π 6 π A 102 i 1 i 第四章 正弦交流电路 [练习与思考] 4-1-1 在某电路中,() A t i 60 314sin 2220-= ⑴指出它的幅值、有效值、周期、频率、角频率及初相位,并画出波形图。 ⑵如果i 的参考方向选的相反,写出它的三角函数式,画出波形图,并问⑴中各项有无改变? 解:⑴ 幅值 A I m 2220 有效值 A I 220= 频率 314 5022f Hz ωππ === 周期 1 0.02T s f = = 角频率 314/rad s ω= 题解图4.01 初相位 s rad /3 π ψ- = 波形图如题解图4.01所示 (2) 如果i 的参考方向选的相反, 则 A t i ?? ? ?? +=32 314sin 2220π,初相位改变了, s rad /3 2π ψ= 其他项不变。波形图如题解图 4.02所示。 题解图4.02 4-1-2 已知A )120314sin(101 -=t i ,A )30314sin(202 +=t i ⑴它们的相位差等于多少? ⑵画出1i 和2i 的波形。并在相位上比较1i 和2i 谁超前,谁滞后。 解:⑴ 二者频率相同,它们的相位差 ?-=?-?-=-=150301202 1 i i ψψ? (2)在相位上2i 超前,1i 滞后。波形图如题解图4.03所示。 题解图4.03
+1 +j 1 m I ? 2 m I ? m I ? ?60? 30?1.234-2-1 写出下列正弦电压的相量 V )45(sin 2201 -=t u ω,)V 45314(sin 1002 +=t u 解:V U ?-∠=?4521101 V U ?∠=? 452502 4-2-2 已知正弦电流)A 60(sin 81 +=t i ω和)A 30(sin 62 -=t i ω,试用复数计算电流 21i i i +=,并画出相量图。 解:由题目得到 A j j j j I I I m m m ?∠=+=-++=?-?+?+?=? -∠+?∠=+=? ??1.231093.32.9)32.5()93.64()30sin 630cos 6()60sin 860cos 8(30660821 所以正弦电流为 )A 1.23(sin 101 +=t i ω 题解图4.04 相量图如题解图4.04所示。 4-2-3 指出下列各式的错误。 A I 3010∠=, )V 45sin 100 +=t ( U ω A e I j 3010=, A )20314sin 10 +=t (I 解:A I 3010∠= 应改为 A I ?∠=? 3010 )V 45sin 100 +=t ( U ω 应该为 )V 45sin 100 +=t ( u ω A e I j 30 10= 应该为 A e I j ? ? =3010 A )20314sin 10 +=t (I 应该为 A )20314sin 10 +=t (i 4-3-1 已知H 1=L 的电感接在400Hz/100V 的正弦电源上,u 的初相位为200 ,求电流并画 出电流、电压的相量图。 解:已知 V U ?∠=? 20100
西北工业大学机械原理课后答案第4章
第四章 平面机构的力分析 题4-7 机械效益Δ是衡量机构力放大程度的一个重要指标,其定义为在不考虑摩擦的条件下机构的输出力(力矩)与输入力(力矩)之比值,即Δ=d r d r F F M M //=。试求图示各机构在图示位置时的机械效益。图a 所示为一铆钉机,图b 为一小型压力机,图c 为一剪刀。计算所需各尺寸从图中量取。 (a ) (b) (c) 解:(a)作铆钉机的机构运动简图及受力 见下图(a ) 由构件3的力平衡条件有:02343=++R R r F F F 由构件1的力平衡条件有:04121 =++d R R 按上面两式作力的多边形见图(b )得 θcot ==?d r F F (b )作压力机的机构运动简图及受力图见(c ) 由滑块5的力平衡条件有:04565=++R R F F G 由构件2的力平衡条件有:0123242 =++R R R 其中 5442R R = 按上面两式作力的多边形见图(d ),得t F G = ? (c) 对A 点取矩时有 b F a F d r ?=? a b =? 其中a 、b 为F r 、F d 两力距离A 点的力臂。t F G = ?
(d) (a)(b) d r R41 F R43 F d G 题4-8 在图示的曲柄滑块机构中,设已知l AB=0.1m,l BC=0.33m,n1=1500r/min(为常数),活塞及其附件的重量G3=21N,连杆质量G2=25N,J S2=0.0425kg·m2,连杆质心S2至曲柄销B的距离l BS2=l BC/3。试确定在图示位置时活塞的惯性力以及连杆的总惯性力。 解:1) 选定比例尺, mm m l 005 .0 = μ绘制机构运动简图。(图(a) ) 2)运动分析:以比例尺vμ作速度多边形,如图(b) 以比例尺 a μ作加速度多边形如图4-1 (c) 2 44 . 23 s m c p a a C ='' =μ2 2 2 2100 s m s p a a S = '' =μ 2 2 2 1 5150 s BC c n l a l a BC t B C= '' = = μ μ α 3) 确定惯性力 活塞3:) ( 3767 3 3 3 3 N a g G a m F C S I = - = - =方向与c p''相反。 连杆2:) ( 5357 2 2 2 2 32 N a g G a m F S S I = - = - =方向与 2 s p'相反。 ) (8. 218 2 2 2 m N J M S I ? = - =α(顺时针) 总惯性力:) ( 5357 2 2 N F F I I = = ') ( 04 .0 2 2 2 m F M l I I h = =(图(a) )
集成电路原理及应用课后复习资料
集成电路原理及应用(第2版) 谭博学 苗汇静 主编 课后习题答案 第二章 模拟集成电路的线性应用 2.9 试分析图1所示电路是什么电路,有何特点?图中设 3 4 21R R R R = 。 (图1) 解:第一级运放为同相放大器。对A 1:由“虚断”和“虚短”得 i 1=i 2,v -1=v +1=u 1i , 则u 1i = 1211R R R u o +,即11 21)1(i o u R R u +=, 对A 2:由“虚断”和“虚短”得 i 3=i 4,v -2=v +2=u 2i , 则 4 2321R u u R u u o i i o -= -,即134234)1(o i o u R R u R R u -+= 代入u 1o 得))(1( 123 4 i i o u u R R u -+=, 因两个输入信号均从同相端输入,所以输入阻抗比较高。该电路为高输入阻抗的差动放大器。 2.11 求图3所示电路的增益A f ,并说明该电路完成什么功能。
解:该电路由两个集成运放构成,A1为主放大器接成反相运算放大器,A2为辅助放大器,A2也接成反相放大器,利用A2对A1构成正反馈,是整个电路向信号源索取的电流极少。 主放大器A 1:由“虚断”和“虚短”得 2 1R u R u o i -= ,则A f = 121o o i i u u R u u R ===- 辅助放大器A2的电压放大倍数:221222 2o o VF i o u u R A u u R = ==- 该电路为自举电路,目的是提高电路的输入电阻。 由1i i i i U U R I I I = =- 由 12i o U U R R =-和321 2o U U R R =-得32i U U = 所以 1i i i U U I R R = - 因此1 1 i i i U RR R I R R = =- 当1R R =时,i R →∞,1I I = 2.12 求图4所示电路输出电压与输入电压的表达式,并说明该电路完成什么功能。 解:对A 1:由“虚断”和“虚短”得 R u R u o i 1 1-=,即u 1o =-u 1i 。A 1为倒相器 对A 2:由“虚断”和“虚短”得