手把手教你打造3线制Jlink ARM-OB STM32

传统20脚JTAG底座个头大,占用PCB面积多,连接线复杂。基于STM32F103C8T的SW模式Jlink,只需要三根线即可与目标板实现通讯,可实现程序下载,单步调试等功能,除了不能检测目标板电压、不能给目标板供电、速度有所降低之外,与完整版JLink的功能是一样的。当然,成本也可以降低很多~
首先从PCB开始,该方案的最初设计是借鉴了IAR公司的开发板原理图,后又经网友XiaomaGee优化后,得到了目前的版本,如下图所示
原理图是用OrCad Capture CIS画的,感觉用起来比AD要舒服一些,外表没有AD花哨,但是用户体验做得很好。电源部分用的是RT9193,线性稳压,价格便宜,体积小,最大输出电流300mA,对于下载器来说已经足够了。左侧中间的接线端子用于给STM32烧写固件,其他部分没什么难度,照着画就行。
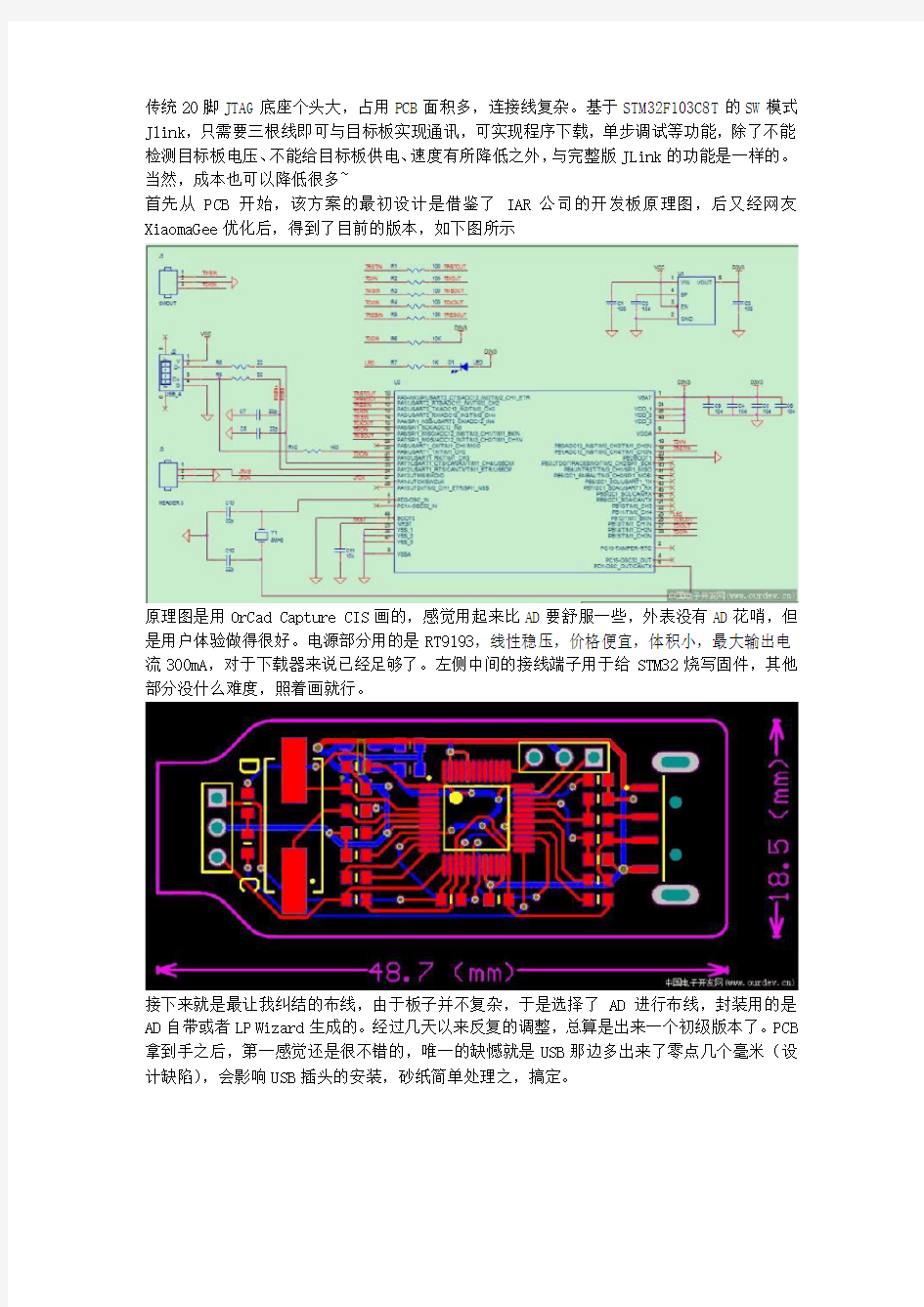
接下来就是最让我纠结的布线,由于板子并不复杂,于是选择了AD进行布线,封装用的是AD自带或者LP Wizard生成的。经过几天以来反复的调整,总算是出来一个初级版本了。PCB 拿到手之后,第一感觉还是很不错的,唯一的缺憾就是USB那边多出来了零点几个毫米(设计缺陷),会影响USB插头的安装,砂纸简单处理之,搞定。
接下来,到了展现本人焊工的时候了,经过反复折腾,看上去还是挺不错的,电容电阻全部选用0603封装,焊起来比较考验功夫,不过有松香就另当别论了。
硬件搞定后就是固件烧写了,烧写工作需要一个通用版的JLink,之后就可以鸡生蛋蛋生鸡了,为了节省板子空间,固件烧写接口仍采用SW模式,20针JTAG工作在SW模式下的引脚定义如下:
只需要SWD、SWC、GND三根线,即7号、9号及GND中的任意一根针,由于固件烧写一次后就不再使用(掉固件的可能性非常低),因此不需要再焊排针上去了,把杜邦排针插上去,斜方向给点力就能良好接触,如下图
连接顺序:插针,原始JLink上电,烧写器上电(USB)。断开时步骤相反,切不可颠倒!尤其不能在上电时断开上图中的连接,否则会烧坏器件!
打开J-Flash ARM
选择File-OpenProject,由于默认工程中没有C8T的选项,所以选择相近的STM32F103RB.jflash 并在Options-ProjectSettings里面,将目标元件改为C8T
选择File-OpenDataFile选择烧写器的固件,点击Target-Connect,会出现以下信息
表示检测并连接到目标芯片,但由于电压过低,断开连接。
对于全功能JLink,1号针的功能有两个:检测目标板电压;为内部的电平转换芯片提供输出端参考电压。也就是说,如果目标板电压为3.3V,那么这里也必须给1号针提供3.3V电压,才能保证正常输出。由上图可知,20针JTAG的2号针可以提供VCC供电,而当我打开J-Link Commander输入power on时,却发现2号针输出的是5V电压,如法通过直接短路1、2号针来解决问题。正当我手足无措的时候,发现JLink的主芯片烧写接口上,有一根线的宽度很可疑
左起第一根线的宽度,用作信号线的可能性很小,极有可能是起到供电的作用,于是拿起万用表,果然!
于是牺牲掉一根杜邦线,问题解决
最终接口连线如图
整体效果
再次Connect,错误消失
点击Target-Auto 自动下载固件,下载成功后出现如下提示
断开连接,重新插上烧写器,电脑提示找到JLink,至此,制作成功~ 进入MDK的JLink设置页,第一次进入会提示固件升级
之后选择SW模式
完成后就可以正常使用了,单步调试什么的都可以完美支持,不过速度会稍微慢一点(2M),毕竟只有3跟线
以下是制作所需资料:
1、原理图(pdf及OrCAD版本)
点击此处下载ourdev_713735AQW1O5.rar(文件大小:29K)
2、PCB(pdf格式,边框已修正)
点击此处下载ourdev_713746Q6KS3O.pdf(文件大小:19K)
3、HEX固件
点击此处下载ourdev_713743PK2H7A.rar(文件大小:27K)
4、XiaomaGee的原版资料(转自原帖),里面有MDK及IAR中的设置方法
点击此处下载ourdev_713739J78TOT.pdf(文件大小:9.28M)
5、IAR原版原理图
点击此处下载ourdev_713747GLWL08.pdf(文件大小:1.07M)
6、元件清单
IC:
STM32F103C8T * 1
RT9193 * 1
电阻(0603封装):
100R * 5
10K * 1
1K * 1
1K5 * 1
22R * 2
电容(0805封装):
105(1uF) * 2
104(0.1uF) * 6
22pF * 4
接插件:
杜邦排针(烧写用) * 3
3线XH2.54 * 1
USB_A插头 * 1
LED(0805 0603均可) * 1
8MHz晶振(贴片) * 1
编者注:本文与原文略有不同,删去了部分无关描述,并修改了一处错误。
基于STM32单片机的智能家居系统设计
单片机课程设计报告 基于STM32单片机的智能家居系统设计 姓名:sssssssssbbbbbbbb 班级:333334444 学号:xxxxxxxxxxxx xxxxxxxxxxxx xxxxxxxxxxxx xxxxxxxxxxxx 指导老师:yyyyyyyyy 日期:2012.05.27~2012.06.07 华南农业大学工程学院
摘要 目前市场上针对普通家庭的智能防盗、防火等产品很多,但基于远程报警系统的智能家居产品价格不菲。本次设计的基于STM32的智能家居报警系统实用性非常强,设计成本低廉,非常适合普通家庭使用,而且随时可以升级。本产品采用的是以意法半导体公司生产的单片机STM32F103RBT6作为主控芯片,AT24C02作为静态存储芯片,4*4 薄膜键盘和红外热式感应作为探测器,GSM和扬声器的家庭报警模块。 随着信息技术的发展,实现家居的信息化、网络化,是当前智能家居系统发展的新趋势。本设计将通信技术与防盗系统紧密结合,为一款便敏小巧,低成本,适合普通室内报警的智能报警系统。本系统通过传感器获取室内人员信息,并将信号发送到单片机微处理器。系统收到报警信息后通过辨认密码的方式确定目标身份,并通过蜂鸣器报警的方式警示入侵者。另外,系统配备具手机通信功能的GSM模块,能将室内安全状况第一时间发送至用户手机终端。不仅大大提高系统安全性及智能性,也方便用户的使用。 经测试,本系统稳定可靠,同时具有友好的人机界面,为用户提供安全服务的同时,实现系统智能化管理。 关键字:智能报警存储器传感器 GSM
目录 1 方案比较与选择 (1) 1.1 方案一:采用数字电路控制 (1) 1.2 方案二:采用双音多频电路与语音电路相结合的控制方案 (1) 1.3 方案三:采用以STM32单片机为核心的控制方案 (2) 2 主要元器件介绍 (3) 2.1 主芯片—STM32 (3) 2.2 显示屏--OLCD12864 (4) 2.3 外部存储芯片--AT24C02 (5) 3 模块分析 (7) 3.1 STM32控制模块 (7) 3.2 密码锁键盘输入及存储模块 (7) 3.3人体热释感应模块 (7) 3.4显示模块 (7) 3.5报警模块 (7) 4 硬件组成部分 (8) 4.1 硬件组成部分 (8) 4.2 仿真分析 (11) 5 电路板的制作,焊接,调试 (13) 5.1电路板制作 (13) 5.2电路板焊接 (14) 5.3电路板调试 (14) 6 讨论及进一步研究和建议 (15) 7 课程设计心得 (16) 附录 (17) 参考文献 (34)
STM32学习笔记
输入模式初始化GPIOE2,3,4 ①IO口初始化:GPIO_InitTypeDef GPIO_InitStructure; ②使能PORTA,PORTE时钟: RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE,ENABLE); ③PE.2.3.4端口配置:GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4; ④设置成(上拉)输入:GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; ⑤GPIO_Init(GPIOE, &GPIO_InitStructure); 输出模式初始化 ①IO口初始化:GPIO_InitTypeDef GPIO_InitStructure; ②使能PB,PE端口时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOE, ENABLE); ③3LED0-->PB.5 端口配置GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; ④设置(推挽)输出模式GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; ⑤设置IO口速度为50MHz GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; ⑥说明初始化哪个端口GPIO_Init(GPIOB, &GPIO_InitStructure); 在LED灯试验中初始为高电平灭GPIO_SetBits(GPIOB,GPIO_Pin_5); 再初始化相同发输出模式时③④⑤可省略例如(经实验初始化恰好为不同IO口相同IO序号③可省略,应该不规范吧) GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED1-->PE.5 端口配置, 推挽输出GPIO_Init(GPIOE, &GPIO_InitStructure); //推挽输出,IO口速度为50MHz GPIO_SetBits(GPIOE,GPIO_Pin_5); //PE.5 输出高 1,头文件可以定义所用的函数列表,方便查阅你可以调用的函数; 2,头文件可以定义很多宏定义,就是一些全局静态变量的定义,在这样的情况下,只要修改头文件的内容,程序就可以做相应的修改,不用亲自跑到繁琐的代码内去搜索。 3,头文件只是声明,不占内存空间,要知道其执行过程,要看你头文件所申明的函数是在哪个.c文件里定义的,才知道。 4,他并不是C自带的,可以不用。 5,调用了头文件,就等于赋予了调用某些函数的权限,如果你要算一个数的N次方,就要调用Pow()函数,而这个函数是定义在math.c里面的,要用这个函数,就必需调用math.h 这个头文件。
基于STM32F103ZET6最小系统设计
电路设计与PCB制板》 设计报告 题目:基于STM32F103ZET6最小系统 引言:Altium Designer基于一个软件集成平台,把为电子产品开发提供完整环境所需工具全部整合在一个应用软件中。 Altium Designer 包含所有设计任务所需工具:原理图和PCB设计、基于FPGA的嵌入式系统设计和开发。 目前我们使用到的功能特点主要有以下几点: 1、提供了丰富的原理图组件和PCB封装库并且为设计新 的器件提供了封装,简化了封装设计过程。 2、提供了层次原理图设计方法,支持“自上向下”的设 计思想,使大型电路设计的工作组开发方式称为可能。 3、提供了强大的查错功能,原理图中的ERC(电气规则 检查)工具和PCB 的DRC(设计规则检查)工具能帮助设计者更快的查出和改正错误。 4、全面兼容Protel系列以前的版本,并提供orcad格式文 件的转换。
一、课程设计目的 1、培养学生掌握、使用实用电子线路、计算机系统设计、制板的能力; 2.提高学生读图、分析线路和正确绘制设计线路、系统的能力; 3.了解原理图设计基础、了解设计环境设置、学习 Altium Designer 软件的功能及使用方法; 4.掌握绘制原理图的各种工具、利用软件绘制原理图; 5.掌握编辑元器件的方法构造原理图元件库; 6. 熟练掌握手工绘制电路版的方法,并掌握绘制编辑元件封装图的方法,自己构造印制板元件库; 7.了解电路板设计的一般规则、利用软件绘制原理图并自动生成印制板图。 二、设计过程规划 1、根据实物板设计方案; 2、制作原理图组件;
3、绘制原理图; 4、选择或绘制元器件的封装; 5、导入PCB图进行绘制及布线; 6、进入DRC检查; 三、原理图绘制 ?新建工程: 1.在菜单栏选择File → New → Project → PCB Project 2.Projects面板出现。 3.重新命名项目文件。 ?新建原理图纸 1. 单击File → New→ Schematic,或者在Files面板的New单元选择:Schematic Sheet。 2.通过选择File → Save As来将新原理图文件重命名(扩展名为M 3.SchDoc),和工程保存在同一文件目录下。
完整word版基于STM32的教室智能控制系统设计
: 基于STM32的教室智能控制系统设计 :本设计借鉴智能家居的智能管理技术,利用STM32F103C8要作为主控制摘 芯片对教室的电气设备进行控制。该系统采用多种传感器进行环境检测,并通过主控模块进行识别与智能判断,以及作出相应的控制动作。本控制系统还通过RS485,使主控模块与电脑进行信息交流,从而可以通过电脑对多个主控模块进行控制,进而实现电气设备的自动化控制及远程控制,从而达到减少电能浪费及自动管理的目的。经测试,该系统功能齐全,各项指标达到设计要求。且该系统成本低,适合应用于高校教室智能管理。 1 教室智能控制系统设计 1.1硬件设计 1.1.1系统硬件结构图 本控制系统主要对不同对象进行相应的数据采集进而对教室的灯、风扇、空调、窗帘、多媒体等电器进行智能控制,并把相应的采集数据和控制状态传输到电脑终端,可进一步通过电脑终端进行远程监控。 本系统采用的模块分别为:系统主控模块、电源模块、显示模块、电机控制模块、继电器模块、人体检测模块、温湿度检测模块、光检测模块等。 系统总体方案框图1 图硬件电路设计1.1.2 系统硬件总体框图如下: 系统硬件原理图如下: 控制模块等模块的具体电路设此原理图简化了各个传感器模块、显示模块、计。 1.1.3传感器模块原理及其作用)温湿度传感器:选取温湿度传感器时需要选取的是传感器的功耗、传感器(1还要考虑传感器的工作电压和信号调整电路的复杂程度等性能以及传感器成本,。数字温度传感器具有安装便捷、维等。经过筛
选,选取数字温度传感器SHT11护方便、可靠性高,而且具有数字式输出、测量精度高、体积小、感应速度免外围电路、免调试、免标定及全互换等优良特性和优点。相关图如下: )红外传感器模块:它是通过探测人体发射的红外信号而输出高低电平2(度左右,所以会人体都有恒定的体温,一般都在的。主要工作原理是: 37左右的红外线,被动式红外探头就是靠探测人体发射的发出特定波长为10um左右的红外线通左右的红外线并通过电路输出高低电平。人体发射的10um10um红外感应源通常采过菲泥尔滤光片后增强红外感应模块的探测距离和探测范围。这种元件会在接收到人体红外辐射温度发生变化时就会失去电荷用热释电元件,平衡和向外释放电荷,经电路处理后产生高低电平。 )光敏电阻模块:在黑暗的环境下,它的阻值很高;当受到光照并且光(3的光光导材料禁带中的电子受到能量大于其禁带宽度Δ辐射能量足够大时,Eg 电使其导带的电子和价带的空穴增加,由价带越过禁带而跃迁到导带,子激发,阻率变小。通过外围电路使其组合成一个模块。模块在环境光线亮度达不到设定阈值时,DO端输出高电平,当外界环境光线亮度超过设定阈值时,DO端输出低电平。 ,可以显的点阵 LCD 采用84x48 (4)显示模块:该模块具有以下特点:接口信号线数量大幅度减少,使用串行接口与主处理器进行通信, 4 行汉字,示传输速率高达条。支持多种串行通信协议,包括电源和地在内的信号线仅有 9 ,可全速写入显示数据,无等待时间。可通过导电胶连接模块与印制版,4Mbps 制板上,因而非常便于而不用连接电缆,用模块上的金属钩可将模块固定到印模块的体积很小。晶片上, LCD 控制器/驱动器芯片已绑定到 LCD 安装和更换。 200μA 以下,且具有掉电模式。采用低电压供电,正常显示时的工作电流在
STM32学习笔记_STM32F103ZET6
STM32F103 系列芯片的系统架构: 系统结构: 在每一次复位以后,所有除SRAM 和FLITF 以外的外设都被关闭,在使用一个外设之前,必须设置寄存器RCC_AHBENR 来打开该外设的时钟。
GPIO 输入输出,外部中断,定时器,串口。理解了这四个外设,基本就入门了一款MCU。 时钟控制RCC: -4~16M 的外部高速晶振 -内部8MHz 的高速RC 振荡器 -内部40KHz低速RC 振荡器,看门狗时钟 -内部锁相环(PLL,倍频),一般系统时钟都是外部或者内部高速时钟经过PLL 倍频后得到 - 外部低速32.768K 的晶振,主要做RTC 时钟源
ARM存储器映像: 数据字节以小端格式存放在存储器中。一个字里的最低地址字节被认为是该字的最低有效字节,而最高地址字节是最高有效字节。
存储器映像与寄存器映射: ARM 存储器映像 4GB 0X0000 00000X1FFF FFFF 0X2000 00000X3FFF FFFF 0X4000 00000X5FFF FFFF
寄存器说明: 寄存器名称 相对外设基地址的偏移值 编号 位表 读写权限 寄存器位 功能说明 使用C语言封装寄存器: 1、总线和外设基地址封装利用地址偏移 (1)定义外设基地址(Block2 首地址) (2)定义APB2总线基地址(相对外设基地址偏移固定) (3)定义GPIOX外设基地址(相对APB2总线基地址偏移固定)(4)定义GPIOX寄存器地址(相对GPIOX外设基地址偏移固定)(5)使用 C 语言指针操作寄存器进行读/写 //定义外设基地址 #define PERIPH_BASE ((unsigned int)0x40000000) 1) //定义APB2 总线基地址 #define APB2PERIPH_BASE (PERIPH_BASE + 0x00010000) 2) //定义GPIOC 外设基地址 #define GPIOC_BASE (AHB1PERIPH_BASE + 0x0800) 3) //定义寄存器基地址这里以GPIOC 为例 #define GPIOC_CRL *(unsigned int*)(GPIOC_BASE+0x00) 4) #define GPIOC_CRH *(unsigned int*)(GPIOC_BASE+0x04) #define GPIOC_IDR *(unsigned int*)(GPIOC_BASE+0x08) #define GPIOC_ODR *(unsigned int*)(GPIOC_BASE+0x0C) #define GPIOC_BSRR *(unsigned int*)(GPIOC_BASE+0x10) #define GPIOC_BRR *(unsigned int*)(GPIOC_BASE+0x14) #define GPIOC_LCKR *(unsigned int*)(GPIOC_BASE+0x18) //控制GPIOC 第0 管脚输出一个低电平5) GPIOC_BSRR = (0x01<<(16+0)); //控制GPIOC 第0 管脚输出一个高电平 GPIOC_BSRR = (0x01<<0);
基于STM32的经典项目设计实例
13个基于STM32的经典项目设计实例,全套资料STM32单片机现已火遍大江南北,各种教程资料也是遍布各大网站论坛,可谓一抓一大把,但大部分都差不多。今天总结了几篇电路城上关于STM32 的制作,不能说每篇都是经典,但都是在其他地方找不到的,很有学习参考意义的设计实例。尤其对于新手,是一个学习stm32单片机的“活生生”的范例。 1.开源硬件-基于STM32的自动刹车灯设计 自动刹车灯由电池供电并内置加速度传感器,因此无需额外连接其他线缆。使用两节5号电池时,设计待机时间为一年以上(待机功耗66微安),基本可以实现永不关机,即装即忘。 2.基于STM32F407的openmv项目设计资料 本项目是一个openmv,通过摄像头可以把图像实时传输给显示屏显示。MCU选择的是STM32F407(STM32F407数据手册),ARM Cortex-M4内核,最高频率可达180Mhz,包含一个单精度浮点DSP,一个DCMI(数字相机接口)。 3.STM32无线抢答器 无线抢答器采用STM32F302(STM32F302数据手册)芯片主控,同时用蓝牙,语音模块,数码管,七彩灯等部件构成,当主持人按下抢答键时,数码管进入倒记时,选手做好准备,当数码管从9变为0时,多名选手通过手机上虚拟按键进行抢答,同时语音播报抢答结果,显示屏上显示选手的抢答时间。 4.基于ARM-STM32的两轮自平衡小车 小车直立和方向控制任务都是直接通过控制小车两个电机完成的。假设小车电机可以虚拟地拆解成两个不同功能的驱动电机,它们同轴相连,分别控制小车的直立平衡、左右方向。 5.基于STM32F4高速频谱分析仪完整版(原创) 本系统是以STM32F407(STM32F407数据手册)进行加Blackman预处理,再做1024个点FFT进行频谱分析,最后将数据显示在LCD12864上,以便进行人机交互!该系统可实现任意波形信号的频谱显示,以及可以自动寻找各谐波分量的幅值,频率以及相位并进行8位有效数据显示。 6.基于STM32F4的信号分析仪设计(有视频,有代码) 这次基于discovery的板子做一个信号分析仪,就是练手,搞清楚STM32F4(STM32F4系列数据手册)中的USB固件编写,USB驱动的开发,上位机UI开发等一整套流程,过一把DIY的瘾。 7.基于STM32F4的解魔方机器人-stm32大赛二等奖(有视频) 本系统是基于Cortex-M4内核的STM32微控制器的解魔方机器人,在硬件方面主要有OV7670摄像头,LCD,舵机,在软件方面主要有OV7670的驱动,摄像头颜色识别算法,解魔方算法和舵机动作算法。整个设计过程包括电子系统的设计技术及调试技术,包括需求分析,原理图的绘制,制版,器件采购,安装,焊接,硬件调试,软件模块编写,软件模块测试,系统整体测试等整个开发调试过程。
基于STM32 智能抓物小车的设计 电子设计II课程报告
摘要 本实验主要分析把握对象的智能车基于STM32F103的设计。智能系统的组成主要包括STM32F103控制器、伺服驱动电路、红外检测电路、超声波避障电路。本试验采用STM32F103微处理器作为核心芯片,速度和转向的控制采用PWM技术,跟踪模块、检测、障碍物检测和避免功能避障模块等外围电路,实现系统的整体功能。 小车行驶时,避障程序跟踪程序,具有红外线跟踪功能的汽车检测电路。然后用颜色传感器识别物体的颜色和抓取。在硬件设计的基础上提出了实现伺服控制功能,简单的智能车跟踪和避障功能的软件设计和控制程序,在STM32集成开发环境IAR编译,并使用JLINK下载程序。 关键词:stm32;红外探测;超声波避障;颜色传感;舵机控制
ABSTRACT This experiment mainly analyzed the grasping object intelligent car based on STM32F103 design. The composition of the intelligent system mainly includes STM32F103 controller, servo drive circuit, infrared detection circuit, ultrasonic obstacle avoidance circuit. This test uses the STM32F103 microprocessor as the core chip, the speed and steering control using PWM technology, tracking module and detection, obstacle avoidance module for obstacle detection and avoidance function, other peripheral circuit to achieve the overall function of the system. The car is moving, obstacle avoidance procedures prior to tracking program, car tracking function with infrared detection circuit. Then use color sensor to recognize object color and grab. On the basis of the hardware design is proposed to realize the servo control function, simple intelligent car tracking and obstacle avoidance function of the software design, and the control program is compiled in the STM32 integrated development environment IAR, and download the program using Jlink. Key words: STM32; infrared detection; ultrasonic obstacle avoidance; color sensing; steering control
STM32的智能家居剖析
中北大学-仪器与电子学院基于STM32的智能家居监控系统 指导教师:洪应平 专业:电子科学与技术 班级: 13060241 小组成员:赵云璋(1306024122) 杨杰(1306024136) 章灿然(1306024141)
摘要 随着“互联网+”的概念进入公众视线,以及无线技术的发展和高速宽带网络的普及,利用互联网来掌控传统一切的做法已为人们广泛接受。现在人们的生活条件大大改善,人们的物质文化追求也逐渐提高。用户打开一款PC软件或手机APP,通过互联网接入到家庭的WIFI 网关,向其发送指令即可控制家中的一切,反之亦可查看家中(传感器)状态,以此来掌控家中的一切情况。 本文推出了一种基于WIFI的智能家居系统,主要提供安全舒适的居家环境,采用STM32F103ZET6作为主控芯片,通过WIFI无线网络技术将家中的监测设备连接到一起,提供火灾报警、有害气体监控、环境数据监测等。与传统的智能家居系统相比,无需布线,免去了安装过程中的布线繁多复杂,成本高,以及使用3G网络作为传输的高额流量费用。有利于提升家庭生活的安全性、便利性、舒适性等,改变了传统的呆板生活方式,帮助人们有效的安排时间,另外也为家庭能源开支节约资金。 关键词:智能家居 WIFI STM32 物联网 Abstract With the concept of "Internet +" into the public eye, and the development of wireless technology and the popularity of high-speed broadband network, use the Internet to control all traditional a pproach has been widely accepted for the people. Now people's living conditions greatly improve d, people's material and cultural pursuit also gradually improve. User opens a PC software or mob ile phone APP, through WIFI Internet access to home gateway, to send commands to control ever ything in the home, and can also view the home state (sensor), in order to control all home situat ion. This paper introduced a kind of smart home system based on WIFI, mainly to provide a safe and c omfortable environment that occupy the home, using STM32F103ZET6as the master control chip, through WIFI network technology will be part of the appliance in the home or monitoring equip ment together, provide the entrance guard system control, fan automatic control, security alarm, environmental data monitoring, etc. Compared with the traditional intelligent household system without wiring, removes the wiring installation process of complex, high cost, and the use of 3 g n etwork as a transport flow of high cost. Help enhance family life safety, convenience, comfort, etc ., has changed the traditional rigid lifestyle, helping people effectively arrange a time, while also s aving money for home energy costs. Keywords: Smart Home, WIFI , STM32, Internet of things
stm32学习 c语言笔记
这是前段时间做彩屏显示时候遇到的难题, *(__IO uint16_t *) (Bank1_LCD_C)这个就是将后面的数据转换为地址,然后对地址单元存放数据。可如下等效: __IO uint16_t *addr; addr = (__IO uint16_t *) Bank1_LCD_C; #ifdef和#elif连用,语法和if。。。else if语句一样 推挽输出增加驱动,可以驱动LED起来 static int count=0 count++ 这个语句中,count仅仅被初始化一次 以后加加一次期中的值就不会变化了 SysTick_CTRL(控制和状态寄存器) SysTick_LOAD(重装载寄存器) SysTick_VAL(当前值寄存器) SysTick_CALIB(校准值寄存器)
TFT经验:弄多大的相片,必须先把那个相片的尺寸改掉,再去取模,才可以,要不会有重影的嘿嘿嘿嘿 VBAT 是电池供电的引脚 VBAT和ADD同时都掉电时才能让备份区复位。 volatile一个变量的存储单元可以在定义该变量的程序之外的某处被引用。 volatile主要是程序员要告诉编译器不要对其定义的这个变量进行优化,防止其不能被引用,不能被改变。 VDDA>2.4V ADC才能工作 VDDA>2.7V USB才能工作 VDD(1.8-3.6v) VBAT=1.8-3.6v VSS VSSA VREF必须接到地线 没有外部电源供电时必须VBAT接上VDD 使用PLL时,VDDA必须供电
printf("abs(x)=%d\n",x<0?(-1)*x:x) 条件编译是问号前边为真则取冒号前边的值,为假的,则取后边的值。 所以说上边这条打印的语句是打印x的绝对值。 //stm32f10x_nvic.c stm32f10x_lib.c stm32f10x_gpio.c stm32f10x_flash.c stm32f10x_rcc.c TIM6 TIM7基本定时器 (只有这两个定时器不能产生PWM) TIM1 TIM8高级控制定时器 TIM2 TIM3 TIM4 TIM5为通用定时器 其中高级定时器TIM1和TIM8可以同时产生多达7路的PWM输出。而通用定时器也能同时产生多达4路的PWM输出,这样,STM32最多可以同时产生30路PWM输出! 修改和自己写代码时候
7个基于STM32单片机的精彩设计实例
7个基于STM32单片机的精彩设计实例,附原理图、代码等相关资料 STM32单片机现已火遍大江南北,各种教程资料也是遍布各大网站论坛,可谓一抓一大把,但大部分都差不多。今天总结了几篇电路城上关于STM32的制作,不能说每篇都是经典,但都是在其他地方找不到的,很有学习参考意义的设计实例。尤其对于新手,是一个学习stm32单片机的“活生生”的范例。 1、STM32与FPGA强强联合,实现完整版信号发生器 话说之前看过作者的另外一个作品,是STM32和FPGA实现的示波器,当然感觉不做。现在作者又推出了信号发生器。重点是TFT触屏来控制波形,相当于一个终端,STM32用来通信,起到了FPGA和TFT之间的纽带作用。最后波形输出作者使用了巴特沃斯滤波器,让输出的波形更加干净。虽然以高端的信号发生器无法比拟,但是用于平时信号输出使用时足够了。 2.采用STM32单片机基于uCOS II系统控制VS1053B语音芯片制作的MP3播放器 一看到uCOS II,就觉得是个高级货,绝对不是一般的小打小闹。该制作耗时半年能完成制作,不得不佩服作者的坚持。这个使用了VC1053B音频模块,TFT液晶显示,还是用了NRF24L01无线模块(暂时没明白这个无线如何使用的),最后作者还很细心的提供了理论指导,方便大家制作。 3.使用OV7670让STM32转身变成照相机(附原理图、代码源文件) 经常使用STM32的同学有没有做过照相机呢?虽说在智能手机遍布的时代,正经相机也要束之高阁了。但是能使用STM32做个相机,拿出去拍个照也是非常拉风的。这个相机使用了ST32F103C8T6(ST32F103C8T6数据手册),摄像头用的是OV7670,带SD卡和触摸屏2.4寸,整体尺寸和卡片机差不多。 4.基于STM32的手机WIFI 控制四轴飞行器设计 我们平时看到的四轴飞行器多是遥控手柄控制的,给你推荐的这个是手机通过wifi就可以控制了,重点在作者还提供了安卓版本的app,直接安装就可以控制飞行器了,当然前提是要根据作者提供的原理图、pcb、代码做出个飞行器了。对APP感兴趣的朋友不妨写写ios 版本的。 5、使用STM32F103RC实现数字万用表设计,具备常用功能 作为电子工程师,最经常用到的就是万用表,可以很少人知道万用表里面的结构、测电压的过程。现在就有人用STM32F103(STM32F103数据手册)做了个数字万用表,只有三个常用功能:测电压(0-50v),测电阻(1k-390k),短路档,使用了LCD5110显示数据,大家不妨动动手开发其他功能。 6、基于RFID技术、以STM32为终端的智能小区管理系统 话说现在高档小区越来越多,对小区的智能化管理也在日渐智能化。这个设计就使用了当下很火的wifi智能控制。系统由多个智能服务终端和系统服务器所组成。智能服务终端就是一个基于STM32的完备系统,涵盖了室内环境监测、高温火警GSM报警、A卡管理助手、天气助手、用户电子账单、万年历、小区意见反馈等功能。
基于STM32的智能小车摄像头循迹系统
分类号编号 烟台大学 毕业论文(设计) 基于STM32的智能小车 摄像头循迹系统 Intelligent Car Tracking System Based on STM 32 Camera 申请学位:工学学士 院系:光电信息科学技术学院 专业:电子信息工程 姓名:王坤 学号: 200813503229 指导老师:杨尚明(教授) 2012年5 月21 日 烟台大学EDA实验室
基于STM32的智能小车摄像头循迹系统 姓名:王坤 导师:杨尚明(教授) 2012年5 月21 日 烟台大学EDA实验室
烟台大学毕业论文(设计)任务书院(系):光电信息科学技术学院 姓名王坤学号200813503229 毕业届别2012 专业电子信息工程 毕业论文(设计) 基于STM32的智能小车摄像头循迹系统题目 指导教师杨尚明学历本科职称教授所学专业无线电技术 具体要求(主要内容、基本要求、主要参考资料等): 主要内容:设计一个抗干扰能力强的智能小车循迹系统。 基本要求:通过对本课程的设计,能够利用OV7670实现黑白线信息采集;并且能够达到一定的抗干扰效果;能够实现实时采集外界环境信息的效果。 主要参考资料: [1]陈启军.嵌入式系统及其应用:基于Cortex-M3内核和STM32F103系列微控制器的系统设计与开发. [M].北京: 同济大学出版社,2008. [2]谭浩强. C语言程序设计. [M].北京: 清华大学出版社,2010. [3]曾星星. 基于摄像头的路径识别智能车控制系统设计[J].湖北汽车工业学院学报, 2008(6): P76-80. 进度安排: 第一阶段:1~4周通过资料、网络、导师了解本设计所需要的知识、资料、相关软件及设计思路方案; 第二阶段:5~8周请教老师查阅资料按要求并由实际情况逐渐得出设计方案及方法;第三阶段:9~11周根据方案在老师的指导下完成相关的软硬件设计; 第四阶段:12~13周撰写论文(分初稿、定稿、审合、打印论文); 第五阶段:14周进行优化调试达到目标并进行论文答辩。 指导教师(签字): 年月日 院(系)意见: 教学院长(主任)(签字): 年月日 备注:
基于stm32的智能家居设计原理
为基础,完成控制台、手持设备及门禁密码锁之间的通信,实现对室内家居电器的远程控制。实验结果表明,该系统运行稳定,具有广泛的应用前景。 智能家居( 又称智能住宅) 是以住宅为平台,兼备建筑、网络通信、信息家电、设备自动化,集系统、结构、服务、管理为一体的高效、舒适、安全、便利、环保的居住环境,是融合了自动化控制系统、计算机网络系统和网络通信技术于一体的家居控制系统。近年来,随着人们生活水平的提高以及计算机技术、通信技术和网络技术的发展, 智能家居逐渐成为未来家居生活的发展方向。因此在实现智能控制的同时,研制一个成本低、实用性强的智能家居系统便显得非常有必要。本文以STM32 单片机为核心设计了一套智能家居控制系统。该系统以语音识别、GSM 通信等技术为基础,通过无线通信、串口通信对系统各部分进行串联,用户可通过门禁密码锁验证身份后进入智能家居系统,利用总控制台设定室内家居的状态,亦可借助触屏手持设备、GSM 手机等对室内家居进行手动或语音控制。 1 智能家居系统硬件平台
建立智能家居控制系统, 硬件是关键和基础,它对整个系统的稳定性、控制和反馈的准确性、节能性都有直接影响。本智能家居系统选用了以下硬件设备: (1) STM32F103VET6 微处理器及STC12-C5A60S2 微处理器 系统中手持设备的微处理器选用STM32F103VET6 ,总控制台及门禁 密码锁部分选用STC12C5A60S2。 STM32F103VET6 基于ARM Cortex M3 32 bit 的RISC内核, 工作频率最高可达72 MHz, 内置高速存储器(64 KB的闪存和20 KB 的SRAM), 丰富的增强I/O 端口和连接2 条APB 总线的外设。 STC12C5A60S2 是高速、低功耗、超强抗干扰的新一代8051 单片机,指令代码完全兼容传统8051 。内部集成MAX810 专用复位电路、2 路PWM、8 路高速10 位A/D转换。 (2) 语音识别芯片LD3320 LD3320 芯片是一款语音识别专用芯片。该芯片集成了语音识别处理 器和一些外部电路, 包括A/D、D/A转换器、麦克风接口、声音输出 接口等。可以实现语音识别、声控及人机对话功能,并且可以任意动态编辑、识别关键词语列表。 (3) GSM 模块TC35 TC35 是一款双频900 MHz 、1 800 MHz 高度集成的GSM 模块,具 有性能稳定,功耗低及易于集成的特点。 (4) 无线模块nRF24L01
基于stm32的智能小车设计毕业设计
海南大学 毕业论文(设计) 题目:基于stm32的智能小车设计学号:20112834320005 姓名:陈亚文 年级:2011级 学院:应用科技学院(儋州校区) 学部:工学部 专业:电子科学与技术 指导教师:张健 完成日期:2014 年12 月 1 日
摘要 本次试验主要分析了基于STM32F103微处理器的智能小车控制系统的系统设计过程。此智能系统的组成主要包括STM32F103控制器、电机驱动电路、红外探测电路、超声波避障电路。本次试验采用STM32F103微处理器为核心芯片,利用PWM技术对速度以及舵机转向进行控制,循迹模块进行黑白检测,避障模块进行障碍物检测并避障功能,其他外围扩展电路实现系统整体功能。小车在运动时,避障程序优先于循迹程序,用超声波避障电路进行测距并避障,在超声波模块下我们使用舵机来控制超声波的发射方向,用红外探测电路实现小车循迹功能。在硬件设计的基础上提出了实现电机控制功能、智能小车简单循迹和避障功能的软件设计方案,并在STM32集成开发环境Keil下编写了相应的控制程序,并使用mcuisp软件进行程序下载。 关键词:stm32;红外探测;超声波避障;PWM;电机控制
Abstract This experiment mainly analyzes the control system of smart car based on microprocessor STM32F103 system design process. The composition of the intelligent system mainly including STM32F103 controller, motor drive circuit, infrared detection circuit, circuit of ultrasonic obstacle avoidance. This experiment adopts STM32F103 microprocessor as the core chip, using PWM technique to control speed and steering gear steering, tracking module is used to detect the black and white, obstacle avoidance module for obstacle detection and obstacle avoidance function, other peripheral extended circuit to realize the whole system function. When the car is moving, obstacle avoidance program prior to tracking, using ultrasonic ranging and obstacle avoidance obstacle avoidance circuit, we use steering gear under ultrasonic module to control the emission direction of ultrasonic, infrared detection circuit is used to implement the car tracking function. On the basis of the hardware design is proposed for motor control function, simple intelligent car tracking and obstacle avoidance function of software design, and in the STM32 integrated development environment under the Keil. Write the corresponding control program, and use McUisp program download software. Keywords:STM32;Infrared detection;Ultrasonic obstacle avoidance;PWM;Motor control
STM32学习笔记
STM32学习笔记——时钟频率 ******************************** 本学习笔记基于STM32固件库V3.0 使用芯片型号:STM32F103 开发环境:MDK ******************************** 第一课时钟频率 STM32F103内部8M的内部震荡,经过倍频后最高可以达到72M。目前TI的M3系列芯片最高频率可以达到80M。 在stm32固件库3.0中对时钟频率的选择进行了大大的简化,原先的一大堆操作都在后台进行。系统给出的函数为SystemInit()。但在调用前还需要进行一些宏定义的设置,具体的设置在system_stm32f10x.c文件中。 文件开头就有一个这样的定义: //#define SYSCLK_FREQ_HSE HSE_Value //#define SYSCLK_FREQ_20MHz 20000000 //#define SYSCLK_FREQ_36MHz 36000000 //#define SYSCLK_FREQ_48MHz 48000000 //#define SYSCLK_FREQ_56MHz 56000000 #define SYSCLK_FREQ_72MHz 72000000 ST 官方推荐的外接晶振是8M,所以库函数的设置都是假定你的硬件已经接了8M 晶振来运算的.以上东西就是默认晶振8M 的时候,推荐的CPU 频率选择.在这里选择了: #define SYSCLK_FREQ_72MHz 72000000 也就是103系列能跑到的最大值72M 然后这个C文件继续往下看 #elif defined SYSCLK_FREQ_72MHz const uint32_t SystemFrequency = SYSCLK_FREQ_72MHz; const uint32_t SystemFrequency_SysClk = SYSCLK_FREQ_72MHz; const uint32_t SystemFrequency_AHBClk = SYSCLK_FREQ_72MHz; const uint32_t SystemFrequency_APB1Clk = (SYSCLK_FREQ_72MHz/2); const uint32_t SystemFrequency_APB2Clk = SYSCLK_FREQ_72MHz; 这就是在定义了CPU跑72M的时候,各个系统的速度了.他们分别是:硬件频率,系统时 钟,AHB总线频率,APB1总线频率,APB2总线频率.再往下看,看到这个了: #elif defined SYSCLK_FREQ_72MHz static void SetSysClockTo72(void); 这就是定义72M 的时候,设置时钟的函数.这个函数被SetSysClock ()函数调用,而SetSysClock ()函数则是被SystemInit()函数调用.最后SystemInit()函数,就是被你调用的了