河海大学e龙-Ⅳ足球机器人系统技术文档
河海大学e龙-Ⅳ足球机器人系统技术文档
视觉子系统
传统的足球机器人视觉系统的硬件由模拟摄像头,镜头,数据传输线和图像采集卡组成。随着足球机器人技术的发展,对摄像头的要求越来越高,摄像头的选择逐渐有模拟转向了数字。同时,摄像头的变化,对镜头的要求也趋提高。在本系统中,使用了德国BASLER A312fc 数字摄像头及相配套的镜头,数据传输线和1394适配卡。
1.系统结构
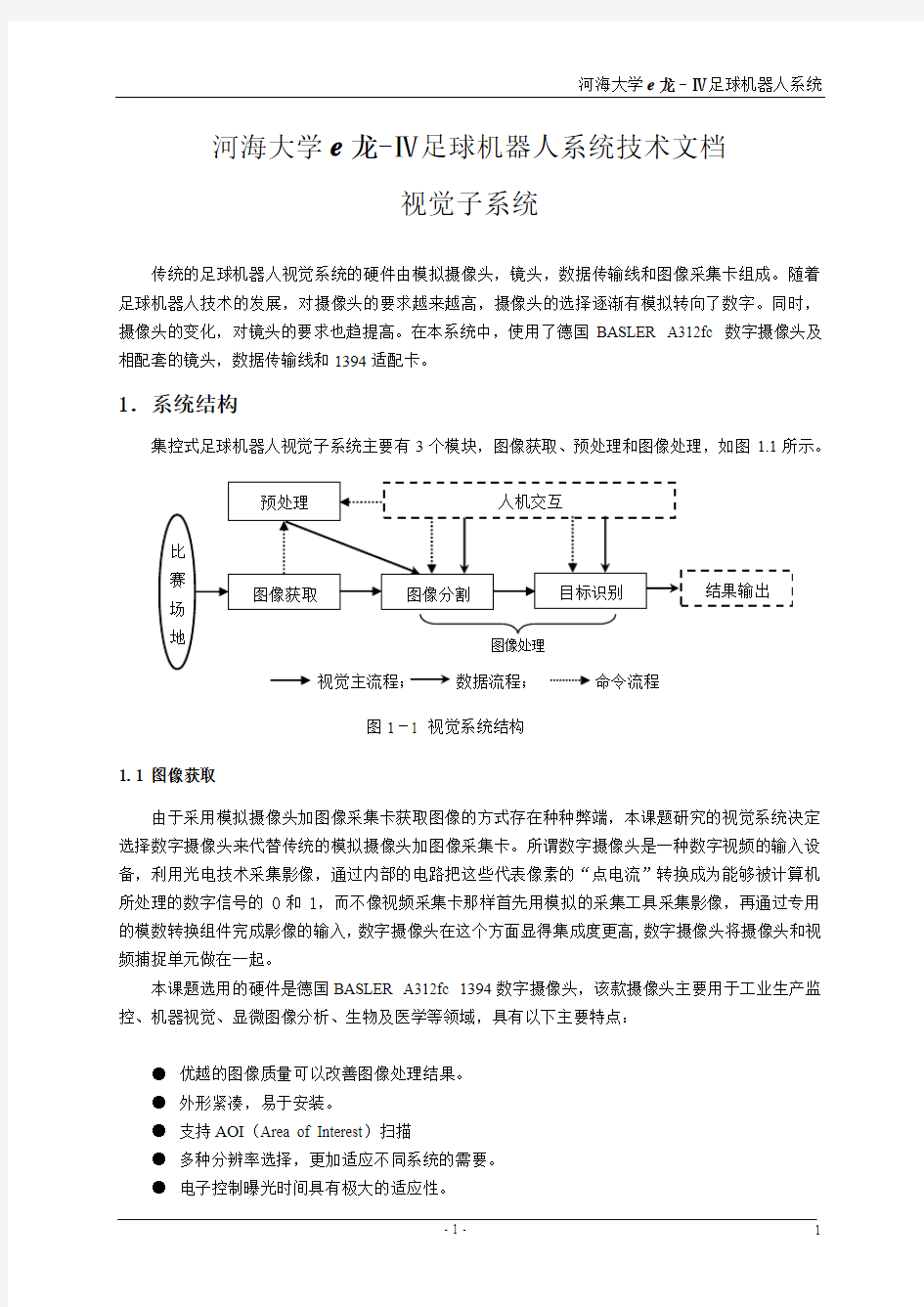
集控式足球机器人视觉子系统主要有3个模块,图像获取、预处理和图像处理,如图1.1所示。
视觉主流程;数据流程;命令流程
图1-1 视觉系统结构
1.1 图像获取
由于采用模拟摄像头加图像采集卡获取图像的方式存在种种弊端,本课题研究的视觉系统决定选择数字摄像头来代替传统的模拟摄像头加图像采集卡。所谓数字摄像头是一种数字视频的输入设备,利用光电技术采集影像,通过内部的电路把这些代表像素的“点电流”转换成为能够被计算机所处理的数字信号的0和1,而不像视频采集卡那样首先用模拟的采集工具采集影像,再通过专用的模数转换组件完成影像的输入,数字摄像头在这个方面显得集成度更高,数字摄像头将摄像头和视频捕捉单元做在一起。
本课题选用的硬件是德国BASLER A312fc 1394数字摄像头,该款摄像头主要用于工业生产监控、机器视觉、显微图像分析、生物及医学等领域,具有以下主要特点:
●优越的图像质量可以改善图像处理结果。
●外形紧凑,易于安装。
●支持AOI(Area of Interest)扫描
●多种分辨率选择,更加适应不同系统的需要。
●电子控制曝光时间具有极大的适应性。
●图像传输采用1394总线传输
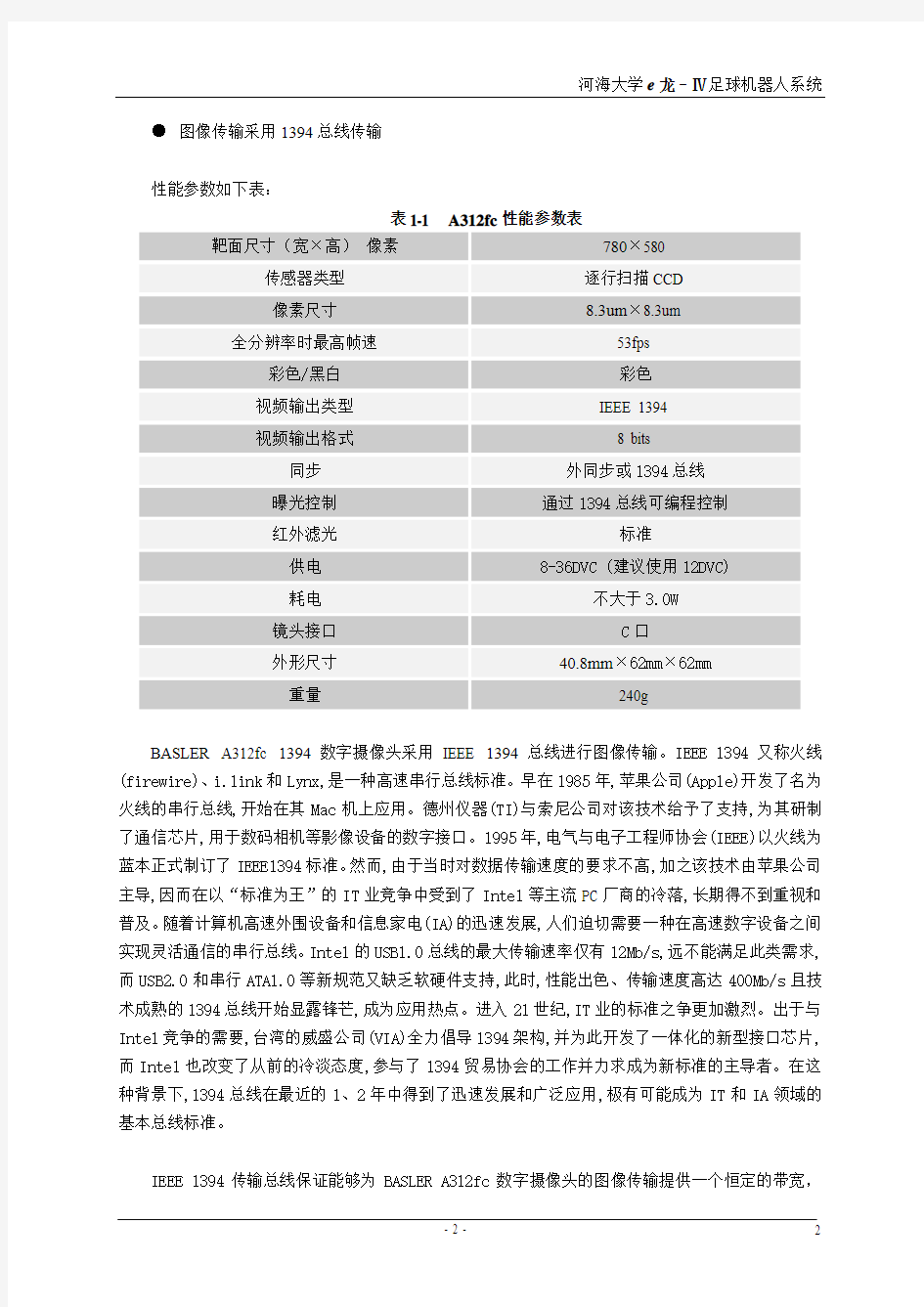
性能参数如下表:
表1-1 A312fc性能参数表
靶面尺寸(宽×高)像素780×580
传感器类型逐行扫描CCD
像素尺寸8.3um×8.3um
全分辨率时最高帧速53fps
彩色/黑白彩色
视频输出类型IEEE 1394
视频输出格式8 bits
同步外同步或1394总线
曝光控制通过1394总线可编程控制
红外滤光标准
供电8-36DVC (建议使用12DVC)
耗电不大于3.0W
镜头接口C口
外形尺寸40.8mm×62mm×62mm
重量240g
BASLER A312fc 1394数字摄像头采用IEEE 1394总线进行图像传输。IEEE 1394又称火线(firewire)、i.link和Lynx,是一种高速串行总线标准。早在1985年,苹果公司(Apple)开发了名为火线的串行总线,开始在其Mac机上应用。德州仪器(TI)与索尼公司对该技术给予了支持,为其研制了通信芯片,用于数码相机等影像设备的数字接口。1995年,电气与电子工程师协会(IEEE)以火线为蓝本正式制订了IEEE1394标准。然而,由于当时对数据传输速度的要求不高,加之该技术由苹果公司主导,因而在以“标准为王”的IT业竞争中受到了Intel等主流PC厂商的冷落,长期得不到重视和普及。随着计算机高速外围设备和信息家电(IA)的迅速发展,人们迫切需要一种在高速数字设备之间实现灵活通信的串行总线。Intel的USB1.0总线的最大传输速率仅有12Mb/s,远不能满足此类需求,而USB2.0和串行ATA1.0等新规范又缺乏软硬件支持,此时,性能出色、传输速度高达400Mb/s且技术成熟的1394总线开始显露锋芒,成为应用热点。进入21世纪,IT业的标准之争更加激烈。出于与Intel竞争的需要,台湾的威盛公司(VIA)全力倡导1394架构,并为此开发了一体化的新型接口芯片,而Intel也改变了从前的冷淡态度,参与了1394贸易协会的工作并力求成为新标准的主导者。在这种背景下,1394总线在最近的1、2年中得到了迅速发展和广泛应用,极有可能成为IT和IA领域的基本总线标准。
IEEE 1394传输总线保证能够为BASLER A312fc数字摄像头的图像传输提供一个恒定的带宽,
在传输速度上完全能够满足需要,同时支持热插拔和即插即用,使得设备在使用和移除时十分方便。
为了配合1394数字摄像头的使用,还需选择一块1394数字接口卡用来传输数字视频流。
此外,在机器视觉系统中,光学镜头相当于人眼的晶状体。好的光学镜头具有良好的均匀度,无论是望远还是摄近,镜头中心的聚焦跟边缘的聚焦基本相同。而品质不好的产品,可以清楚看到聚焦后,边缘不实感非常明显,这将严重影响使用效果.而且如果所选择的镜头品质级别不够,图像轮廓就会产生梯形失真。因此光学镜头的选择也很重要。
1.2 图像预处理
在视觉系统工作的全过程中,特征提取、图像分割和图像辨识是核心工作,为了能使这些工作迅速有效地进行,可以利用系统中图像设备的特有功能,对摄取的图像容量和质量等进行适当调整,这一过程属于图像的预处理。
机器人足球视觉系统预处理主要包括:图像增强、图像恢复、场地标定,还可以适当的进行一定的图像压缩。
图像增强是根据所处环境的光照条件和所选择的颜色模型,对视觉系统所用到的有关颜色的参数进行优化。例如,调整图像的色度、亮度、饱和度、对比度和分辨率,使得图像的效果达到清晰和颜色分明。
图像恢复指是的光学镜头几何形变的矫正,补偿由于光学镜头所带来的图像形变。本文将在第3部分中详细介绍其算法。
场地标定的任务是标定场地的边界。在采集的图像中除了比赛场地以外,还包含场地以外的一些信息。通过场地的标定,在实时辨识的时候,就可以只处理边界以内的信息。这样不但可以减少图像处理信息量,还可以避免引入不必要的干扰。
1.3 图像处理
图像处理包括图像分割和目标识别,它是整个视觉系统的核心工作。
为了使目标从图像背景中分离出来,寻找目标与非目标的差异的过程称为目标识别。而根据所识别的不同目标之间的某些特征差异对图像进行区域划分则称为图像分割。对目标进行辨识,首先需要对图像中的目标进行分割。通过图像分割,可以获得二值化图像,即将图像中的所有像素划分成目标和非目标两类,对应目标像素的点置1,而其它像素点置0。在二值化的图像中,我们可以找到所要辨识的目标。
足球机器人视觉系统寻找的目标是不同颜色的色标,也就是说,要根据颜色来区别目标与非目标,这样首先就应对不同目标进行颜色识别。这一过程主要包括:目标采样、颜色分析、颜色分割等步骤。
颜色采样是在图像中截取目标的部分图像作为研究对象的过程。
颜色分析是对目标的样本图像中目标像素颜色的R、G、B值进行分析和研究,寻找其在RGB 空间的分布特征。
根据目标的颜色特征,在RGB颜色空间中确定相应区域,在同一区域的颜色空间的点归属于同一颜色,也就是通过颜色空间分区来定义不同颜色,即所谓“颜色分割”。
在颜色分割的基础上,对图像进行分割,可以获得多个二值化图像结果,这些二值化图像实际
上是从同一幅图像中获得的。因此,对于多目标图像处理需要获得多重二值化图像结果。
本文将在第5部分中对辨识算法进行详细介绍。
2.初始人机交互
图2-1 Mirosot 3对3 和5对5的初始人机交互界面
图2-2 Mirosot 11对11的初始人机交互界面
在Mirosot 11对11的人机交互界面中,只能够看到有半场的图像。通过在程序中设置左右摄像头,就可实现左右半场图像的切换。在比赛过程中,要对左右半场的两幅图像进行拼接处理,从而得到场地上完整的信息。
初始人机交互操作过程主要完成图像预处理、图像分割和目标识别过程中一些参数选择或参数传递。如:通过人机界面修改图像的色度、亮度的参数,可以改变图像的采集效果等。在视觉交互界面中有摄像头所采集图像的实时显示窗口,在此窗口中可以使用鼠标在图像中画定目标图像的
区域以进行目标颜色的采集。
3.几何矫正
由于场地空间的限制,通常采用广角镜头才能在有限的高度内摄取到整个场地的信息。使用这种镜头只要摄像头高度在一定范围内,通过调整焦距,就可以获得所需的场景图像。但是,相对固定焦距的镜头而言,使用这种镜头图像失真明显,场地边界呈弧形。如果选用固定焦距镜头,要获得固定大小的场景,则需要将镜头固定在某一确定的高度上。既在系统运行前精确调整镜头高度,这会浪费许多时间。因此,从视觉系统快速调整的需要出发,应该选用焦距可变的镜头。另外,无论何种镜头,当镜头位置不能处于场地的正中间上方或者镜头所处的平面不平行于场地平面,都会造成图像的非线性失真。这些非线性失真必然影响视觉辨识的精度,因此对图像进行校正是必需的。
图像矫正的方法有很多种,如分段线性矫正、3阶多项式误差最小矫正、Tsai 模型矫正等。 本视觉系统采用一种新的矫正方法,通过镜头几何畸变的数学模型来实现对失真的矫正。镜头几何畸变的数学模型如下:
???++=++=)
()
(20200012020001y x Ey My y y x Ex Mx x
(1) 式中X 0、Y 0为畸变以前的原始坐标,X 1、Y 1为畸变后的坐标,图像采集卡所采集到的图像是畸变以后的图像,所以我们获得的是X 1、Y 1,要求的是X 0、Y 0。对于式(1)中的参数M 、E 可以由一些先验点(例如门区和四角)的对应关系,通过最小二乘或求平均值的方法得到。对于由式(1)组成的方程组,可以采用牛顿迭代的方法来求解。求解结果如下:
)()1(3)()1()()()1(3
021211
302121000k x x y E M x k x x y E k Mx k x k x ++-++-=+ (2)
2,1,0 )1()1(1100 =+=+k x y k x k y (3)
校正结果比较如图3.2所示:
图 3-1 畸变图像
图 3-2 矫正图像
下表给出了图像校正前后一些特殊点的坐标对应关系,从表中可以看出虽不能完全消除误差,但经校正后,明显降低了和理想坐标之间的误差。在图像变形比较小的地方,如场地中圈附近,由于对称中心附近几乎没有畸变,所以校正效果不是很好,甚至会引起误差,但从整幅图像来看,校正还是可以明显改善图像的变形,使坐标趋近于理想值,这些都可以进一步提高视觉系统目标辨识的精度。为了更加适合足球机器人视觉系统的图像畸变校正,可以考虑在对称中心附近畸变很小的地方不进行校正,而只是在远离对称中心畸变较大的地方进行校正,具体如何划分畸变区域,还需进一步通过实验测定。
表3-1 校正前后一些点的坐标对比
4.颜色模型的选择与颜色信息库的建立
建立特征目标的颜色信息库是视觉系统的主要任务之一,信息库的好坏是影响辨识精度的最关键因素。信息库不完全会导致分割结果不稳定,甚至出现分割结果过小而导致目标丢失。信息库覆盖范围过大又会引入很多不必要的干扰,甚至出现混色现象。另外,一个良好的信息库的结构应该具有好的可维护性,易于调整。
建立颜色信息库首要的任务是选择颜色模型,颜色模型是抽象表示和描述颜色的方法。为了有效区分不同的目标颜色,要求颜色模型要含有足够多的颜色信息;为了提高视觉系统的执行速度,要求颜色含有尽量少的数据量。足球机器人系统常用的颜色模型有RGB模型、HSI模型和YUV模型等。颜色模型的选择与建立颜色信息库的方法是紧密联系的。如果通过阈值进行颜色分割,应选用分布均匀的HSI或YUV模型;如果建立离散的颜色查找表,通常选择RGB颜色模型。
图像处理中最常用、最基本的是RGB颜色空间,它是基于笛卡儿坐标系下的颜色模型,原点对应黑色,(1,1,1)点对应白色,从原点到(1,1,1)点对应的是灰度值分布。RGB模型的缺点是不直观、不均匀、不正交,其各分量之间有高度的相关性。对于RGB颜色模型,通常以颜色查找表(CLUT)的方法建立颜色信息库。这种方法的优点是实时性高,建立方便。而且图像采集卡都可以直接提供RGB颜色模型的图像。但是由于存储矩阵尺寸的限制,我们将24位真彩色表压缩成15位,必然影响分色性能。由于查找表不具有模糊性,而同一色标在场地内的颜色信息的变化范围极其广泛,生成一个完全的表格需要长时间的反复采集填充,且很难真正得到可以覆盖所有的信息的颜色库,所以辨识结果常有空洞。而且这种查找表对于环境的影响抗干扰性较差,一旦环境发生变化,需要长时间的重新采样,无法适应快速调整的需要。
HSI(色度、饱和度、亮度)颜色空间模型是基于柱坐标系的、与人类视觉心理相符合的颜色模型。该模型的特点就是同一种颜色在该空间中的分布是连续的,也就是说所要辨识的目标颜色,在HSI 空间是连续分布的,而且是相互独立的。所谓不同的目标颜色,是在H(例如黄色和蓝色)轴向、S (例如亮黄和土黄)轴向和I(例如黑色和白色)轴向有区别的颜色空间区域的集合。建立在HSI 空间中的颜色信息库,该信息库只记录某一色标的H、S、I值的覆盖范围,也就是H、S、I每一信息的最大值和最小值。信息库的建立也很简单,只需要将色标置于场地内,最有特征的几个区域,例如:门区,中圈,四角。在这些区域进行采样,去定三个信息量的取值范围即可。同时由于该信息库是连续的,因此,我们可以通过手工的方式进行修改。这种颜色信息库易于调整,易于维护。但是由于环境光照变化的影响,如何准确的确定H、S、I阈值也是一个较困难的问题。阈值范围过大会引入大量的干扰信息,阈值范围过小则容易造成目标的丢失。并且,大多数的图像采集卡提供的都是RGB和YUV两种颜色模型。因此要使用HSI颜色模型就要进行从RGB颜色空间到HIS颜色空间的转换。通常的方法是在内存中生成从RGB到HSI的变换表,实时辨识的时候,对于每一个像素点,将它的RGB信息直接输入到变换表中,得到该象素的HSI信息,以判断该象素是否为所要搜索的特征点。但是RGB到HIS的变换表是一个256×256×256×3的矩阵(48M),在一些低性能的计算机上执行效率较低。当然可以根据场地的特征,采用一定的方法减少运算量,但是从RGB到HIS的转换仍占用一定的时间,对系统的实时性有很大的影响。
YUV颜色模型的各分量分布均匀、近似正交,色彩空间分布难于直观表示。它本身是一种压缩格式,所以YUV模型的图像要比RGB和HSI模型的数据量小。但将YUV模型应用于足球机器人
的视觉系统时,YUV各值的调整很不直观。韩国的Soty5和Powersupply就是采用YUV模型阈值法建立颜色信息库的。他们的颜色信息库是在赛前经过大量实验得来的。如果在比赛现场与对方颜色混淆,很难做到临时调整阈值以达到理想的效果。对他们来说如需临时更换颜色几乎是不可能的。
通过比较上述三种颜色模型,每种颜色模型都有自己的优点和不足之处。本课题选用RGB颜色空间模型,主要基于以下考虑:
(1)使用RGB模型不需要再进行颜色空间的转换,减少计算量,提高实时性。
(2)由于本系统采用的1394数字摄像头,图像质量好,可以在一定程度上弥补RGB空间的不足。
(3)足球机器人比赛环境光照充足均匀,并且数字摄像头成像亮度跳变不大,图像光强基本均匀。
(4)采用RGB颜色模型,在场地光照变化的地方多次采样,可弥补RGB模型对光照变化敏感的不足。
因此,本系统采用RGB颜色空间模型,并在此基础上进行数字图像处理。实验证明,采用RGB 模型,可以很好的地实现对数字摄像头获取图像的分割、识别。
5.色标设计与辨识算法
5.1色标设计
目前各参赛队伍使用的色标多种多样,下面列举具有代表性的一部分,如图4-1,并加以分析。
图 5-1 几种色标设计
图5-1(a)、(b)、(d)三种色标设计都是关于机器人小车中心对称的,每种色标均有队标和队员
标志两个色块组成,实时辨识时首先找出队标和队员标志两色块的中心点,那么小车的中心位置就是两色标中心点连线的中点,对于(a)、(d)两种色标,小车的正方向是由队标指向队员标志的射线逆时针旋转45°所指的方向,对于色标(b),小车的正方向即为队标中心指向队员标志中心的射线。上述三种色标设计简单直观,且辨识算法简单,系统实时性高,但也有自身的缺点。由于不同的颜色受环境的影响不同,色块向周围扩散的程度不同,两个色标块交界的区域有混色现象,这些因素都会导致很多的干扰和问题,如色标挑选难,色块重心不稳,位置角度有偏差,而且两个色标是一种对称分布,当两个机器人小车紧挨在一起的时候容易出现粘连现象。
图5-1(c)是直接通过辨识队标的中心及形状来确定机器人的中心和角度,由于该设计中没有队员标志,故而各队标的形状或大小各不相同,以区分车号。小车的中心位于队标的中心,小车的朝向和车号可以通过辨识队标的形状的正方向来确定。这种设计的特点是只通过一种颜色来获取辨识结果。由于环境在同一区域对同一颜色的影响是相同的,因此带来的干扰是均匀的,而由于通道造成的干扰也是均匀分布的,所以色块的中心是稳定的。由于比赛规则规定,对方不允许选用我方队标的颜色作为队标或者是队员标志的颜色,所以不存在对方的干扰问题。然而,由于环境的影响和通道噪声的干扰,会造成色块边界的模糊及扩散,从而影响对色块形状特征的提取。另外由于尺寸的限制,而且色块还必须具有表征方向信息的特殊形状,所以色块之间的形状差异并不是很大,从而对角度的辨识算法提出了很高的要求,比较难以实现。而且当两个我方的小车碰撞到一起的时候,由于边界的模糊,必然导致两个色块的粘连,虽然我们可以通过开启算法将它们分开,可是由于运算量很大,必然影响系统的实时性。
图5-1(e)小车的中心位于队标的中心,由于队标的设计具有明显的方向性,通过一定的辨识算法我们可以得到队标所指向的一条矢量线,然后通过队员标志来辅助决定小车的正方向和车号。由于这种设计也是完全由单一色标来获取辨识结果的,所以它具有图5-1 (c)色标设计的全部优点。另外它采用队员标志来辅助决定正方向和车号,而不需要通过形状来决定,从而也避免了图5-1 (c)色标设计中复杂的形状辨识。但是这种色标设计也存在粘连问题,虽然可以通过一定的算法解决粘连,但仍会影响系统的实时性。另外,采用这种色标求取小车角度信息算法较为复杂,算法的基本思想是利用队标的中心对称特点,从中心点出发沿x轴或y轴分成两个对称的部分,分别求取两个部分的中心,则两个中心点的连线所指的方向即为对标所指角度的近似值,由于队标的位置在比赛过程是随时变化的,因此得到的角度值的误差也是变化的,所以必须利用当前获得的近似角度的法线进一步分割区域,然后再重新计算出一个角度,那么通过补偿算法所获得的角度是更为接近准确值。因此,这种色标设计在计算角度时存在较大的计算量,如果进一步进行角度补偿,对系统的实时性将会产生很大的影响。
以上几种色标设计除了图5-1 (c)仅采用队标获取所有信息外,其余色标均是由队标和队员标志两种色块组成,小车的位置、角度信息和车号需要同时依靠两个色块确定。对于Mirosot 的比赛,每方最多可有11个队员,则除去队标颜色,还需要11种辅助颜色,显然颜色种类越多,越容易造成队员之间相互干扰,选择颜色困难,误识别等诸多问题。
基于以上考虑,本课题的色标设计如图5-2所示:
在本系统的色标设计中,中间矩形块A部分为队标部分,且其长度比色标整体长度缩短1cm,即两端各缩短0.5cm,防止机器人互相接触时可能会出现的粘连现象。根据Mirosot的比赛规则,队标颜色只能为黄色或蓝色。矩形块B和矩形块C为色标的辅助色块,其颜色为除黄色和蓝色以外的
其他颜色,并给出了相应各部分的尺寸大小。可以通过改变矩形块B和矩形块C的颜色,以及调换B和C
图 5-2 本系统的色标设计
的位置来达到改变车号的目的,通过这种方式,11个车号的编码也就只需要3种颜色,大大减少了颜色的使用种类,降低了颜色间相互干扰的可能性。11个机器人的具体编码如下:
表5-1 机器人的具体编码方式
其中:T—队标颜色,即黄色或者蓝色;0—色标的背景色,即黑色;1—辅助颜色1;2—辅助颜色2,3—辅助颜色3。
色标和车号的具体对应关系如下:
5.2 辨识算法的设计 5.2.1 辨识算法的原理
根据色标设计,视觉系统应该能够获取机器人小车在场地中的位置、角度和车号信息,其中位置和角度统称位姿信息。
(1)位置信息获取
由图5-2 的色标设计可以看出,小车的中心位置根据队标中心位置而定,队标的中心主要采用重心法获得,令队标中心点坐标为),(T T y x ,则
???
????==∑∑==N
i i T N
i i T N y y N x x 11
// (5-1) 式(5-1)中,i x 代表符合队标特征颜色的像素点的横坐标,i y 代表符合队标特征颜色的像素点的纵坐标,N 代表符合队标特征颜色的像素点的数量。
(2)角度信息获取
根据色标的设计,机器人正方向和队标的长轴方向相同或相差180度,如图5-4所示。队标长轴的方向可以通过最小二乘法拟合得到,从而得到长轴和x轴所成的夹角,该角度与机器人正方向和x轴夹角相等或相差180度。通过色标,我们发现B部分和C部分的颜色是随着机器人的ID(机器人车号)不同发生变化的,但D部分始终是与背景色相同,即为黑色,且顺着机器人的正方向看过去,D部分始终处在队标A的左侧,因此,先利用最小二乘法拟合出队标长轴和x轴所成的角度,再判断D部分的位置,即可确定机器人正方向与x轴所成的角度。
图5-4 机器人正方向
对D部分位置的判断,我们采取特征点判断法,取色标上的四个特征点,其具体排列见图5-5,H、I、J、K是我们取得四个特征点,并给出相互间的尺寸关系。由于色标设计的特点,只能是H点所在区域和I点所在区域组合为背景黑色,或J点所在区域和K点所在区域组合为背景黑色,而不
图5-5 特征点的分布
可能是其他组合方式。理论上来说,根据队标的质心坐标和长轴的方向角,就可得到H、I、J、K四个点的位置坐标,判断各个区域是否是黑色,只要判断各个区域的特征点是否是黑色即可,但事实由于图像系统的噪声和光线的变化以及场地不同位置的几何变形,使得从队标质心按固定长度和角度得到的颜色极不稳定,即使采用与周围颜色加权平均或中值滤波等方法,识别效果依然不理想。因此我们采用特征区域判断来代替孤立的特征点判断,如图5-5所示,以每个特征点为中心确定的3×3窗口即为特征区域,当特征区域9个像素点中至少有5个像素点为黑色,则认为该区域为背景黑色。依次判断四个区域,若H、I所在的区域为黑色,则队标长轴的方向角和机器人的方向角相等,若J、K所在的区域为黑色,则机器人的方向角等于长轴的方向角加上180度。例如图5-6所示:图5-6 是队标长轴方向角相同时机器人的两种位姿,(a)中H和I所在的区域为黑色,即图5-4
中的D部分在队标的左侧,所以机器人方向角和长轴的方向角相等,(b)中J和K所在的区域为黑色,由于顺着机器人的正方向看,图5-4中的D部分应该始终在队标的左侧,所以机器人的方向角应该为θ+180°,其正方向如图中所示。
(3)机器人的车号判断
在判断找出黑色部分后,只需要判断出另外两个区域的颜色,根据表5-1中车号的编码方式,就可得到车号。与判断黑色区域的原理相同,由于图像系统的噪声和光线的变化以及场地不同位置的几何变形,使得从队标质心按固定长度和角度得到的颜色极不稳定,所以我们也要有特征窗口来代替特征点进行判断。由于判定车号的两个区域至少存在一个区域的颜色为辅助颜色,考虑到颜色之间可能存在的干扰,故把特征窗口放大为5×5窗口,如图5-6所示,当25个像素中至少有15个为辅助颜色时,就判定该区域为辅助颜色区,并给出辅助颜色的代号(1或2或3),若对3种辅助颜色均不满足,则判定该区域为黑色,其颜色代号为0。判断区域颜色时,由于机器人的正方向已经得到,因此,先判断机器人右上方区域的颜色,后判断机器人右下方区域的颜色,根据表5-1中的编码方式和两个区域的颜色代码组合即可得到机器人的车号。
图5-6 用于车号判断的特征搜索区域
5.2.2 辨识算法的软件流程
辨识算法的流程与Mirosot比赛的类型而不同,对于Mirosot 3对3和5对5的比赛,只需使用一个摄像头即可拍全整个场地,因此在视觉处理过程,每个周期也只需处理一幅图像,其算法流程
对于Mirosot 11对11的比赛,由于其场地尺寸较大,要用两个摄像头分别拍摄左右两个半场,才能拍全整个场地,因此在场地设置、图像处理时要分别对两幅图像进行处理,最后进行数据融合,得到全部信息,其流程如下:
辨识算法进行目标搜索时,可采用两种不同的方式:区域方式和全局方式。区域方式就是采用动态窗口,只在运动目标及其周围有限区域内进行搜索,对这些区域以外的图像信息不处理。这种方式可以大大减少像素扫描量,提高辨识速度,但一旦目标丢失,在下几个视觉周期内,很难再找回来。以全局方式搜索,目标丢失后可以重新找到,但处理数据量大。在Mirosot3对3和5对5比赛中,由于场地尺寸较小,图像数据量和目标体较少,因此可以不用局部搜索,避免某帧图像中目标体丢失后的复杂处理,而在Mirosot11对11比赛中,图像数据量大,目标体多,因此必须用局部搜索来减少处理的数据量,但可能由于某种原因,使得在局部图像范围之内无法搜索到目标体,这时来采用全局搜索来获得目标体的位置,以便为后续的局部搜索确定范围。
河海大学e龙–Ⅳ足球机器人系统技术文档
决策子系统
1.工作原理
机器人足球比赛决策系统是一个复杂的智能控制系统,它广泛采用了PID控制,模糊控制,神经网络,专家系统及最优控制,并能实现系统的自我调节和自适应功能。决策子系统的主要任务是:根据视觉子系统得到并处理后的信息,包括我方机器人信息、对方机器人信息、球的信息等,分析判断比赛场地上敌我双方的攻防形态,经过任务分解、角色分配等一系列处理,做出相应当决策,得到机器人的轮速,通过通信系统发送给场地上的机器人,从而实现比赛中的各种任务。
2、系统设计
MiroSot系统采用的是集中控制方式,即用一个全局控制器,对各个机器人进行统一控制。而决策子系统的设计通常使用的是分层递阶控制的方法。一般来说,决策的思路是先确定机器人之间的协作关系,然后根据配合的要求确定每个机器人的运动方式,再确定各自需要完成的基本动作。分层的具体方式可以有一些不同,这里把决策子系统的层次结构分为协调层、运动规划层、基本动作层,如图1所示。
图1 整个决策类层
协调层的任务是完成机器人之间的协调组织,通过从整体上分析比赛的形势得出群体的协作意图,如同人类足球比赛中教练的临场指挥。协作意图得到后,将其传送到运动规划层。运动规划层将意图分解为各个机器人的目标,并将目标的研究与设计进一步细化,进而形成机器人运动的具体方式,如同每个运动员针对教练的指挥明确自己的动作任务。运动规划层将产生的目标动作传送到基本动作层,基本动作层完成从目标到动作指令的转换,即产生机器人的控制指令,如同运动员下意识地做出的跑动或踢球的动作。
3、协调层实现
协调层要根据比赛场地上的实际情况来部署球员,同时也根据不同的对手及其队形,确定不同的队形。如图2所示MiroSot5:5比赛的标准场地图:
MiroSot
图2 MiroSot5:5场地图
作为决策系统最上层的协调层,首先要考虑各种状态下的开球模式。开球的好坏直接影响到比赛的正常进行和比赛开始后场地上敌我双方的力量对比。
●正常开球
●球门球
●点球
●争球
●任意球
在正常开球的时候,作为开球的一方,必须将球首先踢回本方半场,才能向对方半场推进,这个实际的足球比赛相似。然而作为机器人来说,明显没有人那样智能,能将球准确地传给下一个球员,所以在策略设计的时候,一定要主意在球回踢后,本方机器人有合理的方向和动作以达到准确控球的目的,不然,球很容易会被对方迅速踢到后场,直接对球门构成威胁。对球门球、争球和任意球来说,重要的是如何在比赛开始后使本方的球员迅速填补空缺,占据有利位置,对点球来说,就是要靠机器人的防守能力和射门能力了。不管是那一种开球模式,开球方都明显的占据优势,所以除了在上下半场的开始,双方都有开球机会外,应该避免违反规则而让对方得到开球机会,特别是点球的机会。比赛的规则将会附在其他文件中,同时也可以到FIRA官方网站上下载:https://www.360docs.net/doc/5d1826287.html,.
协调层通过对视觉信息的处理,确定比赛的队形和角色的分配,相关的函数如下:
●函数名:preProcess()(在“用户手册”已有介绍)
传入参数:无
传出参数:无
函数描述:记录前七个周期球的信息,并将它们存储在一个数组里,便要对球的位置和运动轨迹进行预测;备份上一个周期机器人的信息;以完成对视觉信息的预处理。
●函数名:GetAreaNo()(在“用户手册”已有介绍)
传入参数:BallInformation ball
返回参数:int number
函数功能:根据球的位置,综合场地信息,将整个比赛场地划分为32个区域。对每个区域来说,都对应了一个特定的队形,这个队形应该能够确保在这个区域内各个机器人的动作能
够实现策略所预定的任务。
●函数名:formInterpret()
传入参数:int formNo
int bfNo
返回参数:无
函数功能:针对每个区域,给出除守门员外的其余四名机器人应完成的任务。如图3所示,当球在图示位置时,离球距离最近且角度最后的机器人,即球后最近的机器人担当射门的
角色,后面的一个机器人协助带球,再后面一个担当后场防守的角色,在前场接近门
区的机器人充当接应当角色,我方门区的机器人则是守门员。每一个队形的安排都要
根据一定的策略原则布置,争取到达最佳的比赛效果,以上的例子只是一个演示,还
有许多不同比队形安排可供选择。
图3 队形示意图
在角色的分配上,对一个特定的角色,比如说射门角色,要判断用那一个机器人去执行,有许多判别的方法,在国内的论文中都可以找得到。最基本的两种是:基于最短距离优先和最佳角度优先两种方法。前一种方法,在判断时计算出机器人与目标点的距离,然后进行比较,距离目标点距离最短的机器人去执行相应角色;后一种方法则是判断机器人执行角色时的角度是否最好,若机器人的角度与目标角度的差值最小则执行相应当角色。在本系统中,基本上是用基于距离的方法判别执行认为优先级的,但在一些重要的角色中,比如说射门,边线推球等角色中,综合角度与距离的方法进行判别,是执行任务的机器人更优。
相关函数如下:
●函数名:charperformance()
传入参数:int charNo
RobotInford* pRobot
返回参数:float result
函数功能:根据球在不同的区域和机器人所在的不同位置,算出机器人与目标点的距离值。
●函数名:GetBestRobot()
传入参数:double Performance[12]
int charNo
返回参数:int BestRobotNo
函数功能:根据charperformance()得到的结果,找出执行某一角色的最佳机器人。
●函数名:GetCharPerformance ()
传入参数:int no
RobotInford myRobot
dbPOINT ball
dbPOINT dpt
返回参数:float result
函数功能:当机器人要完成的任务类似于射门角色时,以球到目标点距离与机器人到球角度之差为辅助指标,得出结果。
4、运动规划层的实现
在运动规划层里,最主要的动作就是射门和守门的规划,同时还有扫球,边线推球等一些动作的规划,它们是在基本的动作函数的基础上,依据一定的算法来实现的
射门算法
足球机器人射门的基本射门算法可描述如下:(如图4所示)
步骤(1) :计算机器人R 的射门点A ,其公式为
θ= arctan
YG - YB
XG - XB,
XA = XB - K ×cosθ,
河海大学2012年硕士研究生招生参考书目
河海大学2012年硕士研究生招生主要参考书目 007 中国文化概 论 《中国文化概论》宋开芝主编,河海大学出版社 008 社会保障基 金管理 《社会保障基金管理新论》殷俊、赵伟著,武汉 大学出版社,2006年。 011 西方政治制 度 《当代西方国家政治制度》(修订版)唐晓、王为、 王春英等编,世界知识出版社,2005年。 012 社会调查原 理与方法 《社会学研究方法》(第二版)风笑天主编,中国人 民大学出版社,2005年。 013 儿童心理学《儿童发展心理学》刘金花主编,华东师范大学出版社。 050 地球科学概 论 《地球科学导论》刘本培等编,高等教育出版社, 2000 051 大陆岩石圈 动力学 《中国及其邻区区域大地构造学》车自成,科学 出版社,2002 243 日语(二外) 《标准日本语》(初级上、下册,中级上册)人民教育出版社和光村图书株式会社 244 德语请参考相应的本科专业通用教材 245 法语(二外) 《法语》第一、二、三册的前八课马晓宏等编(92年版),外语教学与研究出版社。 246 法语请参考相应的本科专业通用教材 610 法学综合 (1)(含法 理学、行政 法学,不含 行政诉讼法 学) 《法理学》(面向21世纪课程教材)张文显主编, 北京大学出版社、高等教育出版社出版,最新版。 《行政法学》(21世纪法学规划教材)胡建淼 著,法律出版社,最新版。 611 马克思主义 哲学原理 《马克思主义哲学教程》赵家祥主编,北京大 学出版社,2003年 834 社会学理论《社会学教程》(第二版),王思斌主编,北京大学出版社,2003年; 《社会思想名家》,刘易斯·A .科塞(美),石人译,上海人民出版
足球机器人设计【文献综述】
文献综述 机械设计制造及其自动化 足球机器人设计 一、前言 足球运动是大家都非常喜爱的运动。让机器人来踢足球呢?听起来是天方夜谭,可是他确实存在,足球机器人诞生于20世纪末,是高科技与体育运动结合的产物,其目标是到2050年前后,在“可比”的条件下,一支智能足球机器人比赛队伍要能战胜当时的人类世界足球冠军队。这是从事智能足球机器人事业的科技工作者所面临的十分艰巨的挑战。智能足球机器人涉及计算机、自动控制、传感与感知融合、无线通讯、精密机械和仿生材料等众多学科的前沿研究与技术融合,包括动态不确定环境中的多主体合作、实时推理~规划~决策、机器人学习和策略获取等当前人工智能的热点问题。智能足球机器人系统的研究和开发是培养信息自动化科技人才的重要手段,也是展现高科技发展的生动窗口和促进科技成果实用化的一个途径。]1[ 二、国内外足球机器人发展的现状 在人工智能与机器人学历史上,1997年将作为一个转折点被记住。在1997年5月,IBM 的“深蓝”击败了人类国际象棋世界冠军,人工智能界40年的挑战终于取得了成功。在1997年7月4日,NASA的“探路者”在火星成功登陆,第一个自治机器人系统Sojourner释放在火星的表面上。与此同时,RoboCup也朝着开发能够战胜人类世界杯冠军队的智能足球机器人队走出了第一步。 足球机器人的最初想法是由加拿大不列颠哥伦比亚大学的艾伦·马克沃斯(Alan Mackworth)教授于1992年提出的。日本学者迅速对这一想法进行了系统的调研和可行性分析。1993年6月,包括浅田埝( Minoru Asada)、Yasuo Kuniyoshi和北野宏明(Hiroaki Kitano)在内的一些研究工作者决定创办一项机器人比赛,暂时命名为RoboCup J联赛。然而在一个月之内,他们就接到绝大部分是日本以外的研究工作者的反应,要求将比赛扩展成一个国际性的联合项目。由此他们就将这个项目改名为机器人世界杯赛(Robot World Cup Soccer Games,简称RoboCup)。 与此同时,一些研究人员开始将机器人足球作为研究课题。隶属于日本政府的电子技术
水土资源规划课设
河海大学 课程设计计算书 课程设计名称:皂河灌区水土资源综合规划 学生姓名:冯远周 学号:03 专业班级:07农水2班 所在学院:水利水电学院 2011年1月12 日
目录 灌区基本情况 (1) 灌区水资源评价 (5) 确定灌区种植比 (12) 水土资源综合规划成果 (14)
一、灌区基本情况 1、地理、地形情况 皂河提水灌区位于江苏省宿豫县境内,东临宿城区,西邻睢宁县,北接邳州市,灌区1970年基本建成,收益范围七个乡镇,总控制面积为339平方公里(万亩),其中耕地面积万亩,占总面积的69%,土地开发利用程度高,农业较为发达,是全国商品粮生产基地。 2、水文气象情况 灌区属温带季风气候区,气候温和,四季分明,年平均气温14℃,多年平均降雨量,多年平均蒸发量,多年平均无霜期211天,多日平均日照2271小时。灌区降雨量主要集中在作物生长期,多年平均汛期(6-9月)降雨量为,占全年的%,汛期暴雨、大暴雨较为频繁,尤以7-8月最高,而天然植被多遭破坏,废黄河两岸有大面积的黄泛冲积土壤,许多地方存在水土流失。灌区不同季节降雨量差别较大,春秋两季雨水教少,占全年降雨量的%,冬季降雨仅占全年降雨量的%,夏季降雨占全年降雨量的%,春旱、夏涝,秋冬两季干旱时本灌区气候的特点,对农业生产威胁较大,农业生产低而不稳。 3、水资源及水利工程 灌区由皂河电灌站提引京杭大运河灌溉大片农田,总灌溉面积万亩,受益人口万人(2004)。 4、土壤资料
灌区地貌属黄河决口扇形平原,土地平整,坡度小于5%,地表物质为黄泛堆积物,土壤为沙壤土,透水性强,保水性较小。土层厚度在60-100cm之间,耕层厚度平均,容重为cm3,犁层厚度为,容重为cm3,耕层较浅,犁底层较厚,土壤养分含量较低,耕层有机质含量为25g/kg,全氮kg,速效磷,速效钾97ppm,不利于作物高产。耕层孔隙度为%,犁底层孔隙度为%,土壤通气性较好,有利于提高土壤肥力。近年来,为了改善土体结构,灌区做了大量工作,增施有机肥,进行秸秆还田等,抢时间耕翻晒垄,冻垄熟化土壤,促进土壤团粒结构的形成,逐步加深耕层,促进土壤上下层水肥的运行。灌区土壤多为黄泛沉积物,含有一定数量的可溶性盐类,使地下水矿物度增大,干旱季节盐随毛管水作用上升到地表,长期聚集在地表,形成盐碱性潮土,表土PH值大多都为左右,现在多以稻麦轮作,注意养用结合,培养地力。 5、灌区及农业情况 灌区多为人工栽培为主,栽培作物有冬小麦、水稻、夏玉米、棉花、果树、经济作物等,还有自然生长的草木植被、灌木植被、经济木本植被等,林木覆盖率逐年上升,且生长良好。 灌区灌排工程配套,能灌能排,京杭大运河是灌区的主要水源河,水源条件稳定,但特枯年水量感到不足。灌区地势由南向北缓斜,西沙河、西便民河、皮黄河成“川”字型贯穿全区,均可排除内涝。宿豫县地处沂、沭、泗水系下游,素有“洪水走廊”之称,但上游大量来水与当地汛期同步,绝大部分均穿境而过,不能得到很好的利用。
足球机器人智能决策系统设计实现
足球机器人智能决策系统 设计实现 This manuscript was revised on November 28, 2020
本文由liuchentc贡献 pdf文档可能在WAP端浏览体验不佳。建议您优先选择TXT,或下载源文件到本机查看。 第17卷 第4期 北京机械工业学院学报 Juom ̄oeintueocieyfinIsitfMahnrBjgt V0.7NO.114De.02c20 2002年12月 文章编号:08—15(020106820)4—0400—04 足球机器人智能决策系统设计实现 南建辉,贾永乐 (京机械工业学院北计算机及自动化系.北京1o8)oo5 摘 要:球机器人系统为人工智能特别是多智能体的研究提供了一个标足 准的试验平台。系统的核心是“”决策系统;分层递阶决策的基础上,取模块脑即在采
化设计;细介绍了决策系统各个模块包括视觉模块、策模块和控制模块等,提详决并 出了一系列新的实现方法。 关 键 词:球机器人;能决策;块足智模文献标识码:A中图分类号:P1T8 机器人足球比赛兴起于90年代。是自动化及机器人领域最具有前瞻性的研究之一。足它 球机器人系统是一个典型的多智能体系统和分布式人工智能系统,及机器人学、算机视觉涉计和模式识别、智能体系统、工神经网络等领域。而且它为人工智能理论研究及多种技术的多人集成应用提供了良好的实验平台【l。12】由于上述特征。足球机器人研究受到国内外广泛关注。目前比较有影响的足球机器人比赛组织有Rou(器人足球世界杯)FRA(eeainonetnlbtocrslP机mC和IFdrtftmaiaRoo—Sce.oIoA sctn。oii)分别由日本和韩国的学者发起。RbCp的比赛。aooou目前分为4组:真组、10、仿F8组F00组和有腿S20ONY机器人组…3。 近年来,于足球机器人的研究在国内发展较快,其是
2014年中国第一届机器人旅游大赛
2014年中国第一届机器人旅游大赛 “越野游”竞赛规则(室内地毯跑道1.0版) 一、竞赛类别 §1.1竞赛级别类型设置 二、机器人及报名要求 1、机器人由其教练操作启动和停止。 2、尺寸形状,要适应赛场地,不得伤害人,不得损坏场地与环境。 3、允许机器人在比赛中,为了降低重心等目的自动变形,但不得抛洒任何物体。 4、越野过程中,机器人可能会发生碰撞,要有相应的对策,但不允许恶意竞争。 5、参赛对象:在校学生为主研制的机器人。 三、场地、路线、环境 1、场地 室内地毯跑道运动场。地毯与探险寻宝场地相同。 路途中摆放由密度板、塑料、布料、金属、沙、水等制成的特殊障碍设施。 不抢道比赛时,机器人沿白色引导线跑。引导线宽度约23-26mm,两条引导线间距为500mm。2、赛道/跑道 红色中心分隔线和场地边框线,线宽约23-26mm;也可以是200-600mm高宣传布,但底部和顶部各有一条30mm以上的肯定是红色。 机器人从起点出发后,沿赛道前行,然后围绕中心分隔线逆时针前进, 第2圈开始可抢跑道。 四、障碍
模仿野外环境,障碍的制作也不求精细,表现为尺寸有误差。用普通密度板制作,表面为密度板原色。 1、双驼峰 为连续两个等腰三角条(峰高100mm,底边总长1200mm,宽度覆盖3个赛道)。 2、悬崖 高坡道,长600mm×高150mm;低坡道,长500mm×高125mm;悬崖间距30mm,底边总长1200mm(以后将适度增加高低差及间距),宽度覆盖3个赛道。 3、梯形山峰 四层梯形:第一层(底层),宽度覆盖3个赛道1500,,长1200mm; 第二层,宽度覆盖2.5个赛道,长1250mm; 第三层,宽度覆盖2.5个赛道,长750mm; 第四层,宽度覆盖0.5个赛道,长250mm。 各层厚度均为9mm。 4、波浪板 与探险寻宝游相同,此略。 五、竞赛程序、计时、排序 分组竞赛,每组1-3名机器人。采用秒表计时。 1、初赛:各小组成绩混合排序,得出名次。前50%机器人进入复赛。 2、复赛:各小组成绩混合排序,得出名次。前9个机器人进入决赛。 3、决赛:各小组成绩混合排序,得出名次。如时间相同,根据上一轮比赛成绩决定次序。 根据报名情况及赛场条件,实际赛场以报名后发布的为准。 六、其他 1、计划采用9mm 的中密度板制作(不包括波浪板)。 2、如与组委会规章不一致的,以组委会规章为准。
河海大学水资源规划及利用复习知识点
河海大学水资源规划与利用复习资料 一、 水资源特点:流动性,可再生性,多用途性,公共性,利与害的两重性 水资源的综合利用:同时满足几个部门的需要,并且将除水害和兴水利结合起来统筹解决,这种开发水资源的方式,称为水资源的综合利用 防洪与兴利矛盾:疏浚河道有利于防洪、航运等,但降低了河水位,可能不利于自流灌溉引水;若筑堰抬高水位引水灌溉,又可能不利于泄洪,但却降低了水电站的水头,使所发电能减少。 二 1水资源评价的涵义与任务 水资源评价是对某一地区或流域水资源的数量、质量、时空分布特征、开发利用条件、开发利用现状和供需发展趋势作出的分析估价。它是合理开发利用和保护管理水资源的基础工作,为水利规划提供依据 依据:《中华人民国水法》《水资源评价导则》(SL/T238-1999) 水资源评价的容: 水资源评价的背景与基础水资源数量评价水资源质量评价 水资源开发利用及其影响评价水资源综合评价 2、中国水资源评价分区 10个一级区——按流域水系划分,以松花江、辽河、海河、黄河、淮河、长江、东南诸河、珠江、西南诸河和西北诸河 80个二级区——一级区以下划分二级区,基本保持河流水系完整性; 3、水平年、典型年和系列法 ●水平年 基准年:为现状情况,又称现状水平年,是指进行水资源评价工作的现状情况,以某一年为标准——力求准确地反映实际情况 近期水平年:为近期情况,一般为基准年以后的5~10年——要求有一定的精度——供需分析时应进行平衡的调整 中期水平年:为远景情况,一般为基准年以后的15~20年——精度要差一些——供需分析时也可不作调整平衡 远期水平年:一般为基准年以后的30~50年——精度将会更差一些——仅侧重于区域水资源承载能力的宏观分析 ●典型年法 典型年法又称代表年法 首先根据对已有水文气象资料进行频率分析的成果,确定平水年和枯水年等不同典型年的雨情和水情,然后在此基础上对各水平年的水资源供需情况进行分析 我国规定,平水年保证率P=50%,枯水年保证率P=75%,特枯水年保证率P=90%(或95%) 典型年选择 一般选水利年或水文年,合理确定年总水量和年分配 同一年各分区的保证频率不同时——上、中、下游或各分区的协调 降雨和径流的频率不同时——根据实际情况分析确定:供水主要靠河川径流、而且有较强水库调蓄能力的情况,也应按径流系列选择;河川径流供水相对较少且调节能力差的区域,应按降雨系列选择 ●系列法
集控式足球机器人决策与控制系统设计与开发
文章编号:100220446(2005)0520431205 集控式足球机器人决策与控制系统设计与开发3 薛方正1,徐心和2,冯挺2 (1.重庆大学自动化学院,重庆 400044; 2.东北大学人工智能与机器人研究所,辽宁沈阳 110004) 摘 要:构建了由视觉子系统、决策子系统、无线通信子系统、机器人小车子系统和总控子系统组成的集控式足球机器人系统.总结了具有集中视觉、决策与控制的集控式足球机器人系统的控制问题.设计了基于分层递阶控制结构的足球机器人决策子系统.小车控制器构成“无脑”的执行器,运动控制器中集成了各种各样的动作函数,组织层则融合了不同的决策方案.长期的开发实践和实战成绩都表明,该系统具有良好的结构和优异的性能. 关键词:机器人足球;决策;分层递阶控制;推理模型;反应式策略 中图分类号: TP24 文献标识码: B D esi gn and D evelopm en t of the D ec isi on2mak i n g and Con trol Syste m of Cen tra li zed Soccer Robot XUE Fang2zheng1,XU Xin2he2,FENG Ting2 (1.School of Auto m ation,Chongqing U niversity,Chongqing400044,China; 2.Institute of A I&Robotics,N ortheastern U niversity,Shenyang110004,China) Abstract:A centralized s occer r obot syste m composed of such subsyste m s as visi on,decisi on2making,wireless communi2 cati on,r obot car and cons ole is constructed.This paper su mmarizes the contr ol p r oble m s of the centralized s occer r obot sys2 te m with central visi on,decisi on2making and contr ol syste m,and designs a s occer r obot decisi on2making subsyste m based on the hierarchical contr ol structure.The r obot car contr oller is a“brainless”execut or,the moti on contr oller includes all kinds of acti on functi ons,and different decisi on sche mes are collected in the organizing level.Longti m e devel opment p rac2 tices and competiti on achieve ments p r ove that the system has good structure and high perf or mance. Keywords:r obot s occer;decisi on2making;multilevel hierarchical contr ol;reas oning model;reactive strategy 1 引言(I n troducti on) 集控式足球机器人[1]是指具有集中视觉和统一决策的足球机器人系统,如F I RA的M ir oSot和N ir o2 Sot比赛,RoboCup的小型组(F2180)比赛.每个球队有3~11个机器人不等(因比赛项目而异),但是作为机器人的眼睛(视觉),全队只有一个,高挂在球场上方,通常由CCD摄像头采集图像,并由主计算机统一进行图像处理和识别.每当识别出本队(或双方)球员和球的位置与朝向之后,或将检测信息发送给本方球员(F2180),或交给主机上的决策子系统进行决策(M ir oSot,N ir oSot,F2180).由于视觉功能的统一实现,也由于视觉获得信息比较完整(如果视觉系统设计与临场调试得当),给统一决策带来极大的方便.尽管每个球队都有多个机器人小车,但将此类系统称之为多机器人系统或多智能体系统(multi2agent syste m)却比较勉强,因为它们只具有同一个眼睛和大脑.很显然,此类机器人足球系统相对于其它类型,比如自主机器人(F I RA:RoboSot,RoboCup:F2 2000每个机器人都有自己的眼睛和大脑)与人形机器人(F I RA:Hur oSot,RoboCup:Humanoid既要直立行走,又要独立感知),结构简单,容易开发.所以集控式机器人足球开展得最为普及. 集控式足球机器人一般由5个子系统组成,即视觉子系统、决策子系统、无线通信子系统、机器人小车子系统和总控子系统,如图1所示.许多文献 第27卷第5期 2005年9月机器人 ROBO T Vol.27,No.5 Sep t.,2005 3基金项目:国家863计划资助项目(2001AA422270). 收稿日期:2004-09-16
智能足球实验报告
智能足球实验报告 篇一:实验报告 实验报告 这周,我们去西部自动化楼的自主机器人实验室参观了学校的自主机器人。以前看变形金刚认为机器人的无所不能太虚拟,自己对这方面也不太了解。但通过这次参观后,我对机器人有了初步了解。还记得当时看功夫足球时最后一场比赛人与机器人比赛太虚拟,但当老师给我们放RoboCup中型足球机器人比赛时,自己才感觉到原来机器人踢球也很好玩,机器人踢球也并不虚拟。这次参观并近距离接触后,才知道机器人是怎样踢球的。我看到机器人内部有各种传感器、控制器,机器人就靠这些传感器构成了其里面的各个系统,比如视觉系统,通讯系统等等,它们靠着这些系统在无外界人为信息输入和控制的条件下,独立完成踢球的任务。而且通过老师播放的视频,足球机器人比赛的精彩程度不亚于真实的比赛。随着机器人的不断发展,我想人机大战将很快会实现。?另外,我们还参观了服务机器人,听老师介绍,这是上大自强队比赛用过的机器人。看着它的那支“手”,自己不禁感觉现代社会的科技发展确实迅猛啊!想想原来要让机器人干家务活几乎是天方夜谭,这几乎是不可能办到的事,但现在,一切皆有可能呀!不禁让人感慨啊!而且听老师讲服务机器人的应用范围很广,不仅仅做家务还
可从事维护保养、修理、运输、清洗、保安、救援、监护等工作。他可以是护士的助手,可以是智能轮椅,还可以······而且看了几段上大服务机器人的比赛,对他们能识别不同的环境大为吃惊,不仅仅是主人,物品,甚至连房间的路径也能识别,确实很棒。我想,随着社会的发展,机器人将无处不在,在社会的各个领域都会出现他的身影。 尽管家庭机器人尚未完全产业化,但我想今天的机器人就像20年前的微型计算机一样,作为计算机技术及现代IT综合技术的一个必然延伸,家庭机器人技术将以前所未有的速度实现突破和发展。在不久的将来,社会会因机器人发展而发展,人们的生活也会因机器人的改变而改变。 或许我们现在也会因机自主器人这门课而改变些什么吧!拭目以待吧! 智能自主足球机器人系统的关键技术有机器人控制系统的体系结构、移动机器人自定位、实时视觉、多机器人传感器融合、多机器人协作、机器人的学习等多项关键技术。全自主机器人足球比赛的特点是每个机器人完全自治,即每个机器人必须自带各种传感器、控制器、驱动器、电源等设备。比赛中,各机器人队不允许使用全局视觉,也不允许人为的干预。 ? 篇二:智能足球机器人论文
2013年中国机器人大赛机器人探险游、寻宝游、设计创新比赛规则
中国机器人大赛(合肥) “机器人旅游”竞赛规则 一、竞赛类别、目的、机器人及报名要求 二、场地、路线与环境三、旅游景点四、比赛程序 五、赛前准备工作六、计时计分七、其他 附件一、景点分值表附件二、本次旅游比赛路线图 一、竞赛类别、目的、机器人及报名要求 §1.1竞赛级别类型设置 本次比赛共设置10个竞赛项目,探险类5个,寻宝类5个。 2、寻宝游 §1.2 竞赛目的 探险类旅游竞赛,要求机器人在规定假期时间内,游历尽量多的景点,获得尽量多的得分,并在假期结束前回到出发地。 寻宝类旅游竞赛,要求机器人在规定假期时间内,去随机指定的宝物所在景点寻宝,同时游历尽量多的景点,获得尽量多的得分,并在假期结束前回到出发地。 本类机器人竞赛的目的是引导参赛队研究、设计并制作具有优秀硬件与软件系统的移动机器人,逐步提高机器人多方面的能力与智能,如: a、系统规划与优化能力:在预定的假期时间内游历尽量多的景点,完成计划中的旅游活动,
并回到出发地点。是一种最优规划活动;有一定的系统规划与优化能力。想得高分,就要游历尽量多的景点和难度高的景点,但存在来不及在规定的假期内回家的危险。 每一轮比赛中走两次,使得第一次旅游探路,其后进行自动路径优化成为可能。 b、应变能力:旅游路线可能在比赛开始前很短的时间内正式公布;有些可移动景点与路障的摆放数量与位置,在机器人放进出发区后,随机确定。这在一定程度上可控制竞赛的难度,并使旅游路线有一定的不确定性。 c、视力:考验机器人辨别数字、文字、形状和色彩的能力,引导机器人视觉能力的提高。 d、爬坡能力:对于Ⅱ型和Ⅲ型机器人难度更大。 e、跨越门槛的能力:这对三类机器人都是重大考验。 f、快速性与稳定性。机器人在的整个旅游过程中,始终要在快速性与稳定性中间求得平衡,否则,难以取得好的成绩。 §1.3 机器人 机器人应该有便于操作的启动与停止按钮。 机器人尺寸形状要适应旅游场地与景点,不得伤害人,不得损坏场地、景点与环境。 允许机器人在比赛中,为了降低重心等目的,自动变形。 Ⅰ型机器人:外观,无具体限制,通常为轮式,像一辆汽车。 Ⅱ型机器人:外观,像一个人站在汽车上检阅巡游,肩膀转动轴心到地面的高度不小于机器人承重轮前后最大轴距的2倍;有可以分别独立运动的左右手臂;有可以独立运动的头。 Ⅲ型机器人:外观,像一个人脚上穿着旱冰鞋,鞋上的轮子数量不限;除双腿上端处之外,双腿双足之间不得连接;双腿上端连接处到地面的高度,不小于机器人脚上旱冰鞋承重 轮前后最大轴距;有可以分别独立运动的左右手臂,有可以独立运动的头。 传感器:在不违反规则和规范的情况下,对机器人传感器的类型和数量没有限制。 动力:请在每组比赛点名前为机器人充足电力。点名检录后,不得充电。 §1.4 报名要求 参赛对象:1、高校研制的机器人(主要研制人为在校学生); 2、企业研制的机器人,可参加比赛、不参与评奖排名。 机器人姓名: 要求给每台机器人取一个姓名,用于报名、登记、标示、识别。如:陈李小龙、红魔佐罗、赛德穆桂英、玛利亚安娜、Robot汤姆、打虎武松、飞毛腿AK47、内蒙张飞、齐天大圣1、国美牛魔王等等。 姓名长度不超过5个汉字,2个字母/数字算一个汉字。 参赛队名称: 一个独立法人单位报名参加本项目比赛的所有机器人及相关的老师学生为一个参赛队,队名均为:“××大学/学院机器人旅游队”,不必另起参赛队名称。 二级院/系名称不出现在队名中。 报名机器人数量:
机器人足球赛简介
机器人足球赛简介 RoboCup是一个通过提供足球比赛这样一个标准问题来促进人工智能、机器人以及相关领域的研究而建立的国际组织。 1997年,是人工智能和智能机器人研究史上重要的一年,同年5月,IBM的深蓝机器人击败了人类国际象棋冠军,人工智能领域四十多年的挑战终于成为现实;7月4日,NASA 的“火星探路者”飞行器及其配置的自主移动机器人系统,Sojourner,成功地在火星表面登陆;也就在这一年,首届RoboCup比赛及会议在日本的名古屋举行,为实现机器人足球队击败人类足球世界冠军的梦想迈出了坚实的第一步。 加拿大不列颠哥伦比亚大学的教授Alan Mackworth在1992年的论文《On Seeing Robots》(新加坡世界科学出版社:《计算机视觉:系统、理论与应用》)中提出训练机器人进行足球比赛的设想。1992年10月,在日本东京举行的《关于人工智能领域重大挑战的研讨会》上,与会的研究人员对制造和训练机器人进行足球比赛以促进相关领域研究进行了探讨。1996年,RoboCup国际联合会成立,并在日本举行了表演赛,以后每年举办一届。RoboCup 的使命是促进分布式人工智能与智能机器人技术的研究与教育。通过提供一个标准任务,使得研究人员利用各种技术,获得更好的解决方案,从而有效促进相关领域的发展。他的最终目标是经过五十年左右的研究,使机器人足球队能战胜人类足球冠军队。 RoboCup机器人足球的研究融入了计算机、自动控制、传感与感知融合、无线通讯、精密机械和仿生材料等众多学科的前沿研究与综合集成,其研究领域包括智能机器人系统,多智能体系统,实时模式识别与行为系统,智能体结构设计,实时规划和推理,基于网络的三维图形交互,传感器技术。其技术特点有:动态实时系统、分布式合作与协调、带噪声的,非全信息的环境模型、非符号化的环境信息、受限的通讯带宽等,它的设计主要分成以下模块:机械系统、电子系统、视觉系统、决策系统和通讯系统和车载系统等系统的设计。 l、RoboCup足球机器人仿真组(2D、3D) 仿真组比赛是RoboCup 的组成部分。RoboCup 仿真比赛是一个能为多智能体系统和模拟智能进行研究与教育的工具。比赛是在一个标准的计算机环境中进行的,提供了一个完全分布式控制,实时异步多智能体环境。通过这个平台,测试各种理论,算法和Agent 体系结构。在实时异步,有噪声的对抗环境中,研究多智能体的合作对抗问题。当然,仿真组的比赛使用的机器人并非是真的机器人。一个机器人是Agent, 拥有自己的大脑,是一个独立的"主体"。而一个球队实际是程序组成的。服务器的工作就是计算并更新球场上所有物体的位置和运动,发送视觉和听觉信息给球员,接收球员的命令。
河海大学水文院研究生培养方案(2010版)
城市水务(081521) (Urban Water Affairs) 学科门类:工学(08)一级学科:水利工程(0815)城市水务隶属于水利工程一级学科,河海大学是全国第一个设置城市水务学科硕士和博士点的大学,从2004年开始招生。目前有博士生导师3人。本学科依托河海大学在水利、土木、环境等学科的综合优势,主要涉及城市化地区水文规律分析、水环境及生态保护、水务工程规划、城市水灾害防治、城市水务管理等基本理论研究和技术开发,为城市水利、水务、市政、环境部门以及流域机构培养高层次学术人才。河海大学已有水文水资源与水利工程科学国家重点实验室,水资源高效利用与工程安全国家工程研究中心,建设有上海市等水务科研实践基地,为培养城市水务博士研究生提供了有力的支撑。我校开展城市水务研究已有近三十年的历史,承担了数百项有关城市水务方面的国家攻关项目、国家自然科学基金和部、省级重点科研项目,取得了多项有重要学术价值的科研成果。 一、培养要求 培养面向现代化,品行端正,身心健康,具有强烈的事业心和良好的学术道德,在城市水务科学方面掌握坚实宽广的基础理论和系统深入的专门知识,具备独立从事科学研究和专门技术工作的能力并做出创新性成果,适应我国社会主义建设需要的德智体美全面发展的高层次学术型人才。 二、主要研究方向 1.城市水循环机理(Urban Water Cycle Mechanism) 2.城市水务规划与管理(Urban water Engineering Planning and Management) 3.城市水环境(Urban Water Environment) 三、学分要求 课程总学分为18学分,其中学位课程12学分,非学位课程6学分,教学环节3学分。 四、课程设置
河海大学(已有09试题)
河海大学 水资源环境学院 地理信息系统2005——2006,2008 地理信息系统与遥感2004 自然地理学2004——2005,2007——2008 水文学原理2000,2002——2008 水力学2000,2002——2009 水文地质学2004——2005 水文统计2005 工程水文学2005 有机化学2000——2008 生态学2005 地下水水文学2005——2006 地下水动力学2008 硅酸盐物理化学2000 城市规划原理2006 水利水电工程学院 水力学2000,2002——2009 材料力学2000——2003,2005——2009 理论力学2000——2005 流体力学2001——2008 水文学原理2000,2002——2008 工程水文学2005 交通学院、海洋学院 水力学2000,2002——2009 材料力学2000——2003,2005——2009 流体力学2001——2008 普通化学2005 普通物理2000——2001,2003——2004(其中2000——2001年称“物理”)理论力学2000——2005 硅酸盐物理化学2000 道路交通工程系统分析方法2006,2008 交通工程基本理论2004 交通工程基础理论2005 交通流理论2006——2008 数理方程2007 土木工程学院 材料力学2000——2003,2005——2009 理论力学2000——2005
结构力学2000,2002,2004——2008 水力学2000,2002——2009 测量平差2002——2008 高级语言程序设计2007 C程序设计语言2000——2001 FORTRAN语言程序设计2000 PASCAL语言程序设计2001 计算机原理2002 地下水水文学2005——2006 地下水动力学2008 工程物探2008 钢结构2000,2002 钢筋混凝土结构2000,2002 工程地质学2004 构造地质学2007——2008 土力学2002 岩石力学2002 岩土工程、防灾减灾及防护工程专业复试(含土力学、岩石力学)2004——2005 环境科学与工程学院 水力学2000,2002——2009 有机化学2000——2008 环境微生物学2005 硅酸盐物理化学2000 电气工程学院 电路2000,2002——2009 数字电路与模拟电路2000,2004——2007 自动控制原理2000,2002,2005——2007 微机原理及应用2000,2002 计算机及信息工程学院 电路2000,2002——2009 数据结构1998,2000——2001 数据结构及程序设计2002——2007 C程序设计语言2001 FORTRAN语言程序设计2000 PASCAL语言程序设计2001 计算机原理2002 通信原理2000,2002,2004——2005,2008 信号与线性系统2000,2002 离散数学2000,2004——2007 商学院
机器人足球使用器材
一、机器人足球使用器材 足球运动作为一项体育竞技项目,完美地体现着人类追求配合、协作、体能、竞争……揭示着人类对于美的追求。正是因为它独特的魅力,才能如此长久地鼓舞人们的热情,让你哭、让你笑,让你激动,让你为之疯狂,让你欲罢不能……机器人足球是以足球为载体的前沿高科技研究和高技术对抗,它广泛涉及人工智能、计算机视觉、自动控制、精密仪器、传感和信息等一系列学科的创新研究,其研究成果可广泛应用于工业、农业、军事、信息技术等实际领域,集中反映出一个国家的高科技水平和综合国力。 目前教育部, 中国科协,关心下一代委员会等多个政府部门开展的机器人活动都包括机器人足球项目。但是,比赛机会少。为了能让更多的学生参与这项有意义的活动。西觅亚公司作为世界青少年机器人足球杯(ROBOCUP JUNIOR)的中国代表, 希望提供给大家一个交流的机会,让机器人足球可以普及,从2004年3月开始进行机器人足球邀请赛,并且全国比赛选出的优胜队将会代表中国参加2004年在葡萄牙举办的ROBOCUP JUNIOR 总决赛。 1、机器人控制核心——RCX 我们如何控制机器人的运行?乐高课堂里的机器人主要由微电脑——RCX来控制。RCX有3路输入、3路输出可以连接各种传感器和马达等输入、输出设备。RCX可以保存5个独立的应用程序,通常,其中3个是供用户使用的。需要时,可以将5个独立程序都给用户使用,这需要在“Administrator”中通过点击“RCX Settings”,将RCX的1、2程序解锁。RCX的操作系统是面向事件(event-oriented)的,可以并行处理10个任务。 事实上,我们不仅可以用RoboLab软件来为RCX编写程序,还可以做其他选择,例如NQC(Not Quiet C )。利用ActiveX控件,你可以使用Visual Basic ,Visual C++,Delphi等多达30多种正式、非正式语言为RCX编写程序。更不可思议的是,你甚至可以不用Lego提供的固件,而改用其他的固件,如LegOS。 2、机器人感觉器官——传感器 乐高提供了4种基本的传感器: 光电传感器触动传感器角度传感器温度传感器 其他足球专用传感器: 高级光电传感器
河海大学水土资源规划
《水土资源规划》硕士课程考核备选题目 一、问答题(第7题必选,另任选5题) 1、水作为特殊商品具有哪些经济学属性?可持续发展的水价如何体现这些属性? 2、水资源统一管理的内涵包括哪些方面? 3、简述分布式水文模型的适用条件及其原因。 4、我国如何对土地资源利用进行分类?说明我国耕地的基本国情及其保护目标。 5、阐述土地利用总体规划的原则,编制土地利用总体规划的基本内容包括哪些方面? 6、农用地整理的目标包括哪些方面?农用地整理一般包括哪些单项工程? 7、简述我国水土资源的特征和面临的问题,你认为应从哪些方面推进我国水土资源可持续利 用? 二、课程论文 1、综述水土资源综合规划的理论与方法,包括国内外研究进展、发展趋势及热点问题(字数:5000~6000字)。 说明: 1、可选做问答题或课程论文; 2、请在答卷(或论文)上注明你的姓名、专业及学号; 3、成果一律用A4 纸打印。 2017年12月
《水土资源规划》 问答题 专业 学号 姓名 指导教师张展羽陈菁 2018年1月
1.水作为特殊商品具有哪些经济学属性?可持续发展的水价如何体现这些属性? ①水的经济学属性 (1)水资源价值的多维度性。水资源不仅具有使用价值,如生产和生态功能,也具有非使用价值,如未来选择价值、存在价值和遗产价值。不仅不同水资源在用于不同用途时应被视为不同的经济物品,而且同一水体在同一时间段内由于同时兼有不同的功能,也被视为具有多维价值,这一现象导致了水资源价值研究的复杂性。如水资源按其用途可以被分为消耗性用水(如农田灌溉)和非消耗性用水(如水力发电、航运)。通常状况下,如果消耗性用水量不达到一定的极限是不会影响到消耗性用水的价值。但随着人类水资源开发程度趋近极限,消耗性用水的价值和非消耗性用水的价值是会相互影响的。因此在研究水资源价值时,不仅要研究其单一使用方式的价值,还要研究同一水体不同价值之间的替代关系,以及用水量是如何影响价值之间替代比例的。 (2)水资源价值的空间属性。由于水资源可获得性难易程度不一,势必造成水资源利用成本不同,在这个意义上,水资源价值存在空间差异。如在同一河段左右两岸,由于河道两岸所受水力不同,会导致两岸水资源的利用方式和可利用程度不同,形成微观尺度的价值空间分布差异。另外,水资源作为一种经济要素时是流动的,而且是一种不完全流动,即使其符合可利用的要求也往往需要人们付出劳动、时间与精力,这就是空间经济学意义上的水资源不完全流动性。由于水资源的不完全流动性,地区与地区之间在水资源利用上的比较优势明显不同,水资源利用成本区际差异显著。 (3)水资源价值的时间属性。水资源价值的时间属性表现在两个方面。一方面,水资源中有一部分是不可再生资源(如深层地下水),人们在利用这部分水资源的一个重要原则就是实现其现值的最大化,换而言之,就是实现水资源在时间序列配置上的最优化。另一方面,水资源的另一部分为可再生资源,而不同时间上的相同水量边际价值变化幅度较大,甚至有可能为负值。因此,该部分水资源的利用原则是充分利用边际价值高时的水资源。 ②可持续发展的水价如何体现这些属性 可持续发展水价的理论内涵就是水价所决定的水供求不能超出水资源的承载能力和水环境承载能力;水价所决定的收支水平必须保证供水工程能持续运行和用水户有支付能力。换句话说,可持续发展水价的制定必须能保证水资源的可持续开发与利用,使水资源再生、循环的环境和基础不受破坏,同时兼顾供水工程承受能力和用水户承受能力。因此,可持续发展水价所决定的水供求关系,要以水资源承载能力、水环境承载能力、供水工程的承受能力作为定价的核心内容,以用水户承受能力作为边界条件。
机器人发展现状及趋势分析
机器人发展现状及趋势分析 一、机器人创新发展概述 机器人是集机械、电子、控制、传感、人工智能等多学科先进技术于一体的自动化装备。自1956年机器人产业诞生后,经过近60年发展,机器人已经被广泛应用在装备制造、新材料、生物医药、智慧新能源等高新产业。机器人与人工智能技术、先进制造技术和移动互联网技术的融合发展,推动了人类社会生活方式的变革。 当前,我国机器人市场进入高速增长期,工业机器人连续五年成为全球第一大应用市场,服务机器人需求潜力巨大,核心零部件国产化进程不断加快,创新型企业大量涌现,部分技术已可形成规模化产品,并在某些领域具有明显优势。下面一起随着云里物里科技来看下。 (一)机器人创新发展进程 图1机器人创新发展进程 第一阶段,发展萌芽期。1954年,第一台可编程的机器人在美国诞生。1958年,美国发明家恩格尔伯格建立了Unimation公司,并于1959年研制出了世界上第一台工业机器人。这一阶段,随着机构理论和伺服理论的发展,机器人进入了实用阶段。 第二阶段,产业孕育期。1962年,美国AMF公司生产出第一台圆柱坐标型机器人。1969年,日本研发出第一台以双臂走路的机器人。同时日本、德国等国家面临劳动力短缺等问题,因而投入巨资研发机器人,技术迅速发展,成为机器人强国。这一阶段,随着计算机技术、现代控制技术、传感技术、人工智能技术的发展,机器人也得到了迅速的发展。这一时期的机器人属于“示教再现”(Teach-in/Playback)型机器人,只具有记忆、存储能力,按相应程序重复作业,对周围环境基本没有感知与反馈控制能力。
第三阶段,快速发展期。1984年,美国推出医疗服务机器人Help Mate,可在医院里为病人送饭、送药、送邮件。1999年,日本索尼公司推出大型机器人爱宝(AIBO)。这一阶段,随着传感技术,包括视觉传感器、非视觉传感器(力觉、触觉、接近觉等)以及信息处理技术的发展,出现了有感觉的机器人。焊接、喷涂、搬运等机器人被广泛应用于工业行业。2002年,丹麦iRobot公司推出了吸尘器机器人,是目前世界上销量最大的家用机器人。2006年起,机器人模块化、平台统一化的趋势越来越明显。近五年来,全球工业机器人销量年均增速超过17%,与此同时,服务机器人发展迅速,应用范围日趋广泛,以手术机器人为代表的医疗康复机器人形成了较大产业规模,空间机器人、仿生机器人和反恐防暴机器人等特种作业机器人实现了应用。 第四阶段,智能应用期。这一阶段,随着感知、计算、控制等技术的迭代升级和图像识别、自然语音处理、深度认知学习等人工智能技术在机器人领域的深入应用,机器人领域的服务化趋势日益明显,逐渐渗透到社会生产生活的每一个角落。 (二)机器人产业规模加速增长 根据IDC预测,在全球机器人区域分布中,亚太市场处于绝对领先地位,预计其2020年支出将达1330亿美元,全球占比达71%;欧洲、中东和非洲为第二大区域;美洲是第三大市场。 图22020年全球机器人市场占比 近年来,中国各地发展机器人积极性较高,行业应用得到快速推广,市场规模增速明显。2017年,我国机器人市场规模达到62.8亿美元,2020年,预计超过100亿美元。
河海大学2021专业课参考书目
2021年硕士研究生入学考试自命题科目参考范围 说明:按照教育部规定,学校不提供考试科目参考书,以下书籍仅供参考。 科目代码科目名称参考范围 初试科目: 211翻译硕士英语请参考相应的本科专业通用教材。 243日语(二外)新版《标准日本语》(初级上、下册)人民教育出版社和光村图书株式会社。 245法语(二外)《法语》第一、二、三册的前八课马晓宏等编(92年版),外语教学与研究出版社。 251英语(单)请参考相应的本科专业通用教材及国家考试大纲。 331社会工作原理全国MSW考试专业课考试大纲的基础上,参考下列书籍: 《社会工作概论》(第二版),李迎生,中国人民大学出版社,2010年; 《社会工作理论》(第二版),何雪松,格致出版社&上海人民出版社,2017年;《社会学教程》(第四版),王思斌,北京大学出版社,2016年。 334新闻与传播专业综合能力《新闻采访与写作》编写组:《新闻采访与写作》(马工程重点教材),高等教育出版社2019年。 337工业设计工程《工业设计史》(第4版),何人可,高等教育出版社,2010年;《世界现代设计史》,王受之,中国青年出版社,2002。 357英语翻译基础请参考相应的本科专业通用教材。 431金融学综合请参考相应的本科专业通用教材,《财务管理》《货币银行学》《商业银行经营与管理》《证券投资》。432统计学《统计学》(第五版),贾俊平,中国人民大学出版社,2014年。 434国际商务专业基础《国际商务专业基础复习指南》,科兴教育经济学教学研究中心著,中国石化出版社,每年的最新版;《国际贸易实务(第三版)》,冷柏军、段秀芳,北京大学出版社,2017年1月; 《国际经济学》(第四版),李坤望,高等教育出版社,2017年02月。 436资产评估专业基础《资产评估基础》,中国资产评估协会,中国财政经济出版社,每年的最新版;《西方经济学简明教程》,尹伯承,格致出版社,上海人民出版社,2018年;《财务管理学》,荆新,中国人民大学出版社,2018年。