空间重构描线法
时间序列相空间重构及其应用研究(精)
时间序列相空间重构及其应用研究 摘要时间序列的重构分析是从产生该序列的系统特性的角度提取该时间序列的特征量,在这种分析方法的应用过程中,关联积分和关联维的正确、快速计算是重要的第一步.本文对混沌时间序列相空间重构中最佳延迟时间间隔和嵌入维数的选取方法作了综述, 基于时间序列分析的方法,提出了一种神经网络时间序列预测及建模方法. 关键词时间序列 ,相空间重构,延迟时间间隔, 关联维,神经网络 1 引言 混沌是一种低阶确定性的非线性动力系统所表现出来的非常复杂的行为,它对现代科学具有广泛而深远的影响,几乎覆盖了一切学科领域,尤其是在物理学、天体力学、数学、生物学、经济学等方面得到了广泛的应用.在对混沌时间序列的各种分析中,如混沌预测(prediction of chaos)。动力学不变量(dynamical invariants)的估计。混沌信号的诊断(detection of chaos)等,所要进行的第一步工作是要对混沌信号进行相空间重构.1981年Takens提出了相空间重构的延时坐标法,奠定了相空间重构技术的基础,这种方法用单一的标量时间序列来重构相空间,包括吸引子、动态特性和相空间的拓扑结构.现已成为最主要、最基本的相空间重构方法[1]. 分形维是用来描述混沌信号的一个重要参数,目前主要流行是基于GP算法的关联维提取算法。 2 G.P算法的描述 自从人们发现延迟时间对重构相空间的重要之后,便开始了探索确定延迟时间的方法,并取了显著的成效,相空间重构理论认为,要保证相空间重构的正确性,所选用的延迟时间必须使重构相空间的各个分量保持相互独立,选择的延迟时间如果太大, 就混沌吸引子而言,由于蝴蝶效应的影响,时间序列的任意两个相邻延迟坐标点将毫不相关,不能反映整个系统的特性;而延迟时间选择过小的话,时间序列的任意两个相邻延迟坐标点又非常接近,不能相互独立,将会导致数据的冗余。.因此我们需要一种方法来选择恰当的 ,于是围绕这一条件便先后出现了用自相关函数和互信息来确定延迟时间的方法[3]。自相关函数能够提供信号自身与它的时延之间由冗余到不相关比较这种的度量,一般取自相关函数值首次出现零点时的时延为所要确定的时间延迟。现描述如下: 对于单变量时间序列x 1, x 2 , x 3 ,…, x n 取延迟时间为 ,则其自相关函数为: (9) 其中,n为时间序列点数, 为时间序列的平均值.延迟时间的选取原则是让时间序列内元素之间的相关性减弱,同时又要保证时间序列包含的原系统的信息不会丢失.研究表明,当关联函数C的值第一次为0(或近似为0)对应的延迟时间比较合适[4]. 4 关联维m的选取
城市群空间结构演化趋势与空间重构
城市群空间结构演化趋势与空间重构 ———以长株潭城市群为例 汤放华1,陈立立2,曾志伟1,易纯 1(1.湖南城市学院,湖南益阳, 413100;2.湖南师范大学资源与环境科学学院, 湖南长沙,410081)【摘要】随着全球化和区域经济一体化进程的不断推进,未来长株潭城市群区域空间将出现三个趋势:区域一体化、信息化与知识化、 生态文明趋势。在此三个趋势的影响下,长株潭城市群必然要进行空间重构,其进行空间重构的措施主要包括:构建区域一体的 “流动空间”体系,构建区域发展所需要的五个支撑网络;构建以生态基础设施为空间分割的组团式空间结构;实现区域等级空间结构的扁平网络化,实现要素流动的无阻隔。在上述三个趋势及措施的指引下,长株潭城市群将增强区域的综合竞争力已实现其作为中部重要增长极的历史重任。【关键词】空间结构;演化趋势;空间重构;长株潭【中图分类号】TU982.2 【文献标识码】A 基金项目:2009年湖南省自然科学基金项目[09JJ6060]“长株潭城市群空间结构优化研究”项目资助。 引言 经济全球化和区域经济一体化已成为一股不可阻挡的历史潮流,它在给世界带来巨大变化的同时,也给区域经济协调发展带来深远的影响。跨国公司推动了新国际地域劳动分工的形成,制造业的国际转移使得当今区域城镇空间的发展日益呈现出网络状的复杂联系,区域城镇发展的前途、层次与绝对的规模已非必然相关 [1][2] ,“城镇在网络中的地位比 空间区位、 工业综合程度等传统的特征来得更为重要”[3] 。“城市体系将不再是传统的行政区相连模式,而是构建在功能节点(中心城市)和发展轴上的商品流、 人流、资金流、信息流的流动。[4] ”区域城镇实体空间与影响空间越来越大的分离,世界城市、出口加工区、离岸银行中心等新战略地点的形成,对城镇来讲, 机遇与挑战并存;在区域内部一体化发展正逐步加强的同时,“核心-边缘”效应的范围已扩大到国家、 区域之间,在新的空间层次继续得到强化,并呈现迅速加大的趋势。 传统城镇体系的研究往往是将研究地域视作一 个相对闭合的自运行系统,着眼对于本系统内要素的均衡配置及良性运作的探讨,习惯于将城镇作为 点状的要素[ 5] ,仅仅注重城镇之间的关系,而忽视了对乡村、生态空间等地域的研究。 生态环境和人文物质环境的形成都需要漫长的历史积累,一旦破坏往往不可逆转。快速城市化必然带来城市空间的快速扩张, 不可避免的要将一部分既有人文物质、自然生态环境包入到城市空间之中,以往一味以牺牲人文物质环境和生态环境为代价来换取经济增长的做法已被证明不可持续。因此在新时代下,人文物质环境和生态环境的保护也必须要纳入到区域发展的主线中。 1 空间演化趋势 1.1 区域一体化趋势 在全球化和信息化发展的背景下,地域生产方 式和空间组织方式发生着激烈的变化, 日趋一体化发展的城市集团已成为区域经济发展和参与国际竞争的主要载体。各城市集团为增强区域竞争力,在内部以建立一体化的生产体系为前提,打破行政壁垒, 促进生产要素高效流动与优化配置;在外部以建立全球化的市场体系为目标,消除市场障碍,积极融入全球经济体系和城市体系。随着城市集团的发展壮大,将呈现出“区域一体化”的空间组织形态:一
相空间重构参数选择方法的研究
1 前言 混沌时间序列分析与预测的基础是Takens,Packard等提出的状态空间的重构 理论[1,2] ,即把具有混沌特性的时间序列重建为一种低阶非线性动力学系统。通过相空间重构,可以找出混沌吸引子在隐藏区的演化规律,使现有的数据纳入某种叫描述的框架之下,从而为时间序列的研究提供了种崭新的方法和思路[3]。相空间重构 相空间重构参数选择方法的研究 谢忠玉1,2 张 立2 1.哈尔滨工程大学自动化学院 150001; 2.黑龙江工程学院电子工程系 150050 是非线性时间序列分析的重要步骤,重构的质量将直接影响到模型的建立和预测。而重构相空间或者说构造一个非线性时间序列的嵌入,需要选择两个重要参数——嵌入维数m和延迟时间τ。对于无限长、无噪声数据序列,延迟时间τ的选取理论上没有限制,而嵌入维数m可以选择充分的大。实际中,由于数据长度有限并可能带噪,τ和m的选择对相空间的重构质量就尤其重要。关于嵌入维数m和延迟时间τ的选取,现在主要有两种观点。一种观点认为两者是互不相关的,如求时延的自相关法、互信息法,求嵌入维的G-P算法、FNN(flase nearest neighbors) 法等。另一种观点认为两者是相关的,如时间窗口法、C-C法和嵌入维、时间延迟自动算法等[4] 。多数研究人员认为,第2种观点在工程实践中更为实用、合理。有关嵌入维和延迟时间联合算法的研究是混沌时间序列分析的热点之一。 本文在国内外学者工作的基础上,结合时间窗法[5]和互信息法[6],提出一种新的确定嵌入维数和时间延迟的联合算法。在 仿真试验中用本方法确定的嵌入参数计算 Lorenz系统的混沌不变量(关联维数D), 算例表明本文提出的方法是有效的。 2时间窗口法及互信息法 提出联合算法以时间窗口法及互信息法为基础计算嵌入维和延迟时间,时间窗口法及互信息法的基本原理和存在的问题如下: 2.1 时间窗口法 1996年Kugiumtzis提出延迟时间τ的选取不应该独立于嵌入维数m,而应该依赖延迟时间窗口 τw=(m-1)τ (1) 具体算法为:首先根据原时间序列的波动求出平均轨道周期τp,在保证嵌入维数m大于序列本身关联维D的前提下,均匀τw值后依据式(1)变换m和τ的值,使用关联维作为验证指标,逐渐改变 τw的大小来确定最优的时间窗长度。经过多次试验发现,在一定时间窗长度下,大 致为τw≥τp,只要m和τ的值满足式(1),最后求出的关联维就保持不变。时间窗口法的优势是:能够同时确定m和τ,但时间窗口在确定m和τ的值时经过大量的试验,因此计算量较大。2.2 互信息法互信息法是估计重构相空间延迟时间的一种有效方法,它在相空间重构中有着 广泛的应用。考虑两个离散信息系统{s1,s2,…sn}和{q1,q2,…qn}构成的系统S和Q。根据信息论的知识,从两个系统测量中所获得的平均信息量,即信息熵分别为:在给定S的情况下,我们得到的关于 系统Q的信息,称为S和Q的互信息,用下 式表示: 其中Psq(si,qj)为事件si和事件qj的联合
相空间重构python
from operator import sub import numpy as np from sklearn import metrics from sklearn.neighbors import NearestNeighbors from toolz import curry def global_false_nearest_neighbors(x, lag, min_dims=1, max_dims=10, **cutoffs): """ Across a range of embedding dimensions $d$, embeds $x(t)$ with lag $\tau$, finds all nearest neighbors, and computes the percentage of neighbors that that remain neighbors when an additional dimension is unfolded. See [1] for more information. Parameters ---------- x : array-like Original signal $x(t). lag : int Time lag $\tau$ in units of the sampling time $h$ of $x(t)$. min_dims : int, optional The smallest embedding dimension $d$ to test. max_dims : int, optional The largest embedding dimension $d$ to test. relative_distance_cutoff : float, optional The cutoff for determining neighborliness, in distance increase relative to the original distance between neighboring points. The default, 15, is suggested in [1] (p. 41). relative_radius_cutoff : float, optional The cutoff for determining neighborliness, in distance increase relative to the radius of the attractor. The default, 2, is suggested in [1] (p. 42). Returns ------- dims : ndarray The tested dimensions $d$. gfnn : ndarray The percentage of nearest neighbors that are false neighbors at each dimension. See Also -------- reconstruct References ----------
城市空间发展 相关书目
专著: 1.段进;城市空间发展论;南京:江苏科学技术出版社;2006年12月 2.段进、比尔·希列尔等;空间研究3:空间句法与城市规划;南京:东南大学出版社;2007年1月 3.张勇强;空间研究(2城市空间发展自组织与城市规划);南京:东南大学出版社;2006年6月 4.张京祥罗震东何建颐;体制转型与中国城市空间重构;南京:东南大学出版社;2007年1月 5.杨冬辉;城市空间扩展与土地自然演进:城市发展的自然演进规划研究——中国城市规划·建筑学·园林景观博士文库;南京:东南大学出版社;2006年1月 6.陈泳;城市空间:形态、类型与意义——苏州古城结构形态演化研究;南京:东南大学出版社;006年10月 7.王兴中;中国城市生活空间结构研究;北京:科学出版社;1901年1月 8.周春山;城市空间结构与形态;北京:科学出版社;2007年1月 9.(美)刘易斯·芒福德编译者:宋俊岭倪文彦;城市发展史(起源演变和前景;北京:中国建筑工业出版社;2005年3月 10.王旭了;美国城市发展模式:从城市化到大都市区化;北京:清华大学出版社;2006年2月 11.何念如、吴煜;中国当代城市化理论研究;上海:上海人民出版社;2007年1月 学位论文: 1.王晓燕;银川市城市空间发展战略研究[D];武汉大学;2005年 2.毕凌岚;生态城市物质空间系统结构模式研究[D];重庆大学;2004年 3.沈磊;快速城市化时期浙江沿海城市空间发展若干问题研究[D];清华大学;2004年 熊国平;90年代以来中国城市形态演变研究[D];南京大学;2005年 黄大鹏;芜湖城市土地利用及空间形态演变研究[D];安徽师范大学;2003年 曹坤梓;城市化进程中山地城市空间形态演进与发展研究[D];重庆大学;2004年 王剑锋;城市空间形态量化分析研究[D];重庆大学;2004年 张愚;基于可见性的空间及其构形分析[D];东南大学;2004年 徐昊;我国中部地区城市化进程中城市群空间形态研究[D];华中科技大学;2004年 丁小兰;大城市周边地区小城镇整合研究[D];苏州科技学院;2007年 王国志;长春市城市化空间发展格局研究[D];东北师范大学;2007年 杜聪;济宁市城市空间形态演变及其分析[D];中国地质大学(北京);2010年 崔宁;重大城市事件对城市空间结构的影响[D];同济大学;2007年 严昕;厦门近代城市规划历史研究[D];武汉理工大学;2007年 范少言;城市地域系统演变的理论研究[D];东北师范大学;2004年 李世峰;大城市边缘区的形成演变机理及发展策略研究[D];中国农业大学;2005年 邹卓君;大城市居住空间扩展研究[D];浙江大学;2003年
大都市周边城镇空间重构
大都市周边城镇空间重构 摘要:江津作为重庆绕城高速经过的除主城区之外的唯一一个区县,在重庆主城区进入“二环时代”的发展背景下,其城市发展动力发生了较大改变,原来以几江片区为核心的城市空间发展结构受到了巨大冲击。文章梳理了江津中心城区空间发展的历程,探讨了重庆主城区空间发展趋势对江津中心城区的影响,探讨大都市周边城镇空间重构的特点。 关键词:绕城高速;发展动力;空间重构 abstract: jiangjin as the chongqing high-speed beltway passes in addition to the main city only a county, into the “ development background of second time” in the downtown area of chongqing city, great changes have taken place in the city development, city spatial development structure with a few original area as the core have been a tremendous impact. this paper combs the history of jiangjin space center city development, discusses the impact of the development trend of chongqing urban district of jiangjin space center city, discuss the characteristics of space surrounding towns in metropolitan reconstruction. key words: highway; development; space reconstruction 中图分类号: [f299.22]文献标识码:a 文章编号: 江津中心城区发展演变历程
基于改进的C-C方法的相空间重构参数选择
基于改进的C-C 方法的相空间重构参数选择* 陆振波 蔡志明 姜可宇 (海军工程大学电子工程学院, 武汉430033) 摘 要:针对混沌时间序列相空间重构C-C 方法的三点不足,提出了一种基于改进的C-C 方法的确定最优时延与嵌入窗的新算法。在关联积分计算过程中引入了权衡计算精度与速度的可调参数,合理选择该参数,能在不严重损失估计精度的前提下,大大加快计算速度。在理论分析的基础上,用所提出的算法对三种混沌序列进行相空间重构,仿真结果表明该算法对最优时延的选择更准确,对最优嵌入窗的选取更可靠。 关键词:混沌,时间序列分析,相空间重构,关联积分 Determination of embedding parameters for phase space reconstruction based on improved C-C method Lu Zhen-bo Cai Zhi-ming Jiang Ke-yu (Electronic Engineering College, Navy Engineering University, WuHan 430033, China) Abstract : A new algorithm to determine delay time and embedding window was presented based on the improved C-C method modified the classical C-C method in three aspects. Considering precision and rapidity of computation, an optimal parameter was introduced into the computation of correlation integral. On the foundation of theory study, phase space reconstruction of three kinds of chaotic time series is carried out, and the result of simulations verify that the algorithm is more applicable for determining appropriate delay time and embedding window. Key Words : chaos, time series analysis, phase space reconstruction, correlation integral 1 引言 近年来,混沌时间序列分析方法在很多科研和工程领域中得到广泛应用。相空间重构是混沌时间序列分析的基础,Takens [1]等人提出了用延迟坐标法对混沌时间序列},,2,1|{N i x x i ???==进行相空间重构 },,2,1,],,,,[|{)1(M i x x x X X X T t m i t i i i i ???=???==?++ (1) 其中m 为嵌入维,t 为时延,t m N M )1(??=为相空间中的点数。 Takens 定理证明了如果嵌入维m ≥12+d ,d 为系统动力学维数,则重构的动力系统与原动力系统在拓扑意义上等价。Takens 定理 *国家重点实验基金(批准号:514450801JB1101)和 国家重点实验基金(批准号:51444030105JB1101)资助的课题 联系人:E-mail: luzhenbo@https://www.360docs.net/doc/593249284.html,
《描点定位画图》教案教学设计及反思
《描点定位画图》教案教学设计及反思 这是一篇由网络搜集整理的关于《描点定位画图》教案教学设计及反思的文档,希望对你能有帮助。 1、认识坐标图,理解坐标轴和坐标的概念。 2、能正确标出任一点的坐标。 3、学习定位作图命令,并能用描点定位法画出较复杂的图形。 4、培养学生初步的平面解析几何思维能力。 教学重、难点: 1、能正确标出任一点的坐标。 2、学习定位作图命令,并能用描点定位法画出较复杂的图形。 教学方法: 教学法、演示法、练习法、讨论法 教具、学具: 电脑、演示图案、每个学生一张制定好的坐标纸 教学过程: 一、复习导入 1、引导学生复习前面学过的内容,画正三角形,画正五边形。主要是让学生计算小海龟在作图时的转向。 2、复习小海龟转向角度的计算。 二、新授 1、我们有一句祝福语叫“一帆风顺”,主要的赠送物品就是一条小船。当你
把你创作的作品赠送给朋友时,不但增加了你们的友谊,还让朋友分享到你的成果,这是一件多么有意义的事啊! 今天,我们大家一起来制作帆船。 2、观察教材53页图10.1,想一想,你准备怎么画? 分析:这是一些看似不规则的图形组合的。 给学生一点时间,让他们随便的画,作一种漫无目的的尝试,感觉到所画的线总是达不到自已希望的效果,而且角度也不好计算,步数(线长)也不能确定,在这种情况下,一定要思考用什么方法来解决。 3、认识坐标图 同学们都观察了以上的“帆船”图吧,也尝试节画图,那么你们觉得画这幅图有哪些困难呢? 转向角度不知道是多少,前进或后退的步数不知道是多少。这就需要要同学们去计算了。 我们今天就来学习一种新的画图方法,坐标作图。 先认识一下坐标图(教材54图10.2): (1)分组观察,讨论。说说你对坐标图的理解。教师提问,学生回答。 (2)讲解坐标图: 坐标图上的两条有箭头的粗线就是坐标轴,成十字交叉,交点用O表示,横向的一条为X坐标轴,纵向的一条为Y坐标轴。 组成坐标图的网络线(水平线和垂直线)之间的距离是相等的。 以O为起点,就是0,向上为正数,向下为负数;向右为正数,向左为负数。
基于Matlab的空间描点机器人建模与仿真报告
课程设计 课程名称机器人学 题目名称空间描点机器人建模仿真学生学院 专业班级 学号 学生姓名 指导教师
目录 1.课程设计要求 (1) 2.空间描点机器人的设计 (2) 2.1机器人构型及坐标 (2) 2.2D-H参数表 (4) 3.正运动学 (5) 3.1齐次变换矩阵 (5) 3.2 空间描点机器人工作空间 (6) 4.几何法求逆解 (7) 5.程序流程图 (8) 6.总结分析 (9) 7.Matlab程序附录 (10) 7.1 Mov_6DOF_Rob_Lnya.m (10) 7.2 DHfk6Dof_Lnya.m (12) 7.3 IK_6DOF_Rob_Lnya.m (13) 7.4 Build_6DOFRobot_Lnya.m (14) 7.5 Erzhihua.m (14) 7.6 draw_Workplace.m (15) 7.7 Matrix_DH_Ln.m (16) 7.8 Connect3D.m (17)
1. 课程设计要求 一,按照附件模板填写,要求有封面和目录,除签名处不能有手写。二,主要内容包括下面几个部分, 1,设计一款六自由度机器人,要求2,3,4,5关节中有一个是滑动关节,其余关节应为转动关节。试构想该机器人的功能,并根据功能设定机器人的介绍参数(杆件长度及关节极限) 2,建立机器人的正运动学模型,进行Matlab 运动仿真。(分析机器人的工作空间,制作机器人各个运动的动画。) 注意事项: 1)要求画出机器人的关节坐标系,列出DH 参数表,以及各个关节间的齐次变换矩阵。 2)Matlab仿真应画出工作空间的立体图和剖面图。采用机器人产品的同学应与实际说明书的工作空间做对比。自行设计的同学要做简单的分析讨论。 3)直接采用例程里面的三自由度机器人该部分得0 分。 3,实现逆运动学轨迹规划 注意事项: 1)这里特指机器人末端的轨迹规划,不是关节空间的轨迹规划。2)要实现控制机器人末端在空间中完成某种轨迹。(如直线,圆弧,心型,写字等) 3)可以采用求解逆运动的方程或者是利用微分运动。 4)写出详细的推导过程(公式)。 5)要求有仿真截图及动画。 6)只能使用matlab 及本课程提供的例程,不能使用工具箱。 7)仅仅使用3自由度例程的同学本部分分数会很低 4,自由发挥项(完成这一部分的同学才能够得到90分以上) 1)机器人完整逆解的求解方式(数值解); 2)寻找奇异点,分析奇异位型。 5,Matlab程序作为附录应添加在课程设计报告书的最后面。要求在第一页附上程序流程图,注明函数调用过程,此外,程序要排好版。
混沌时间序列处理之第一步:相空间重构方法综述
第1章 相空间重构 第1章相空间重构 (1) 1.1 引言 (2) 1.2 延迟时间τ的确定 (3) 1.1.1自相关函数法 (4) 1.1.2平均位移法 (4) 1.1.3复自相关法 (5) 1.1.4互信息法 (6) 1.2嵌入维数m的确定 (7) 1.2.1几何不变量法 (7) 1.2.2虚假最近邻点法 (8) 1.2.2伪最近邻点的改进方法-Cao方法 (9) 1.3同时确定嵌入维和延迟时间 (10) 1.3.1时间窗长度 (10) 1.3.2 C-C方法 (10) 1.3.3 改进的C-C方法 (12) 1.3.4微分熵比方法 (14) 1.4非线性建模与相空间重构 (14) 1.5海杂波的相空间重构 (15) 1.6本章小结 (16) 1.7 后记 (16) 参考文献 (17)
1.1 引言 一般时间序列主要是在时间域或变换域中进行研究,而在混沌时间序列处理中,无 论是混沌不变量的计算、混沌模型的建立和预测都是在相空间中进行,因此相空间重构 是混沌时间序列处理中非常重要的第一步。 为了从时间序列中提取更多有用信息,1980年Packard 等人提出了用时间序列重构 相空间的两种方法:导数重构法和坐标延迟重构法[1]。从原理上讲,导数重构和坐标延 迟重构都可以用来进行相空间重构,但就实际应用而言,由于我们通常不知道混沌时间 序列的任何先验信息,而且从数值计算的角度看,数值微分是一个对误差很敏感的计算 问题,因此混沌时间序列的相空间重构普遍采用坐标延迟的相空间重构方法[2]。坐标延 迟法的本质是通过一维时间序列{()}x n 的不同时间延迟来构造m 维相空间矢量: {(),(),,((1))}x i x i x i m ττ=++?x(i) (1.1) 1981年Takens 等提出嵌入定理:对于无限长、无噪声的d 维混沌吸引子的标量时 间序列{()}x n ,总可以在拓扑不变的意义上找到一个m 维的嵌入相空间,只要维数 21m d ≥+[3]。Takens 定理保证了我们可以从一维混沌时间序列中重构一个与原动力系 统在拓扑意义下等价的相空间,混沌时间序列的判定、分析与预测是在这个重构的相空 间中进行的,因此相空间的重构是混沌时间序列研究的关键[2]。 1985年Grassberger 和Procaccia 基于坐标延迟法,提出了关联积分的概念和计算公 式,该方法适合从实际时间序列来计算混沌吸引子的维数,被称作G-P 算法[4]。G-P 算 法是混沌时间序列研究中的一个重要突破,从此对混沌时间序列的研究不仅仅局限于已 知的混沌系统,而且也扩展到实测混沌时间序列,从而为混沌时间序列的研究进入实际 应用开辟了一条道路[2]。 坐标延迟相空间重构技术有两个关键参数:即嵌入维m 和时间延迟τ的确定。在 Takens 定理中,对于理想的无限长和无噪声的一维时间序列,嵌入维m 和时间延迟τ可 以取任意值,但实际应用最后等时间序列都是含有噪声的有限长序列,嵌入维数和时间 延迟是不能任意取值,否则会严重影响重构的相空间质量。 有关时间延迟与嵌入维的选取方法,目前主要有两种观点。一种观点认为两者是互
c-cmethod 相空间重构
School % 此程序用来测试CC_method % 2008-12-01 % zhangli clear all clear all %利用方程获得 % 产生Lorenz 时间序列 % dx/dt = sigma*(y-x) % dy/dt = r*x - y - x*z % dz/dt = -b*z + x*y sigma=16; % Lorenz 方程参数 b=4; r=45.92; y=[-1,0,1]; % 起始点(1 x 3 的行向量) h=0.01; % 积分时间步长 k1=10000; % 前面的迭代点数 k2=3000; % 后面的迭代点数 Z=LorenzData(y,h,k1+k2,sigma,r,b); X=Z(k1+1:end,1); max_d=200; % 最大延迟时间 % 调用C_CMethod_inf,求tau tic [Smean_inf,Sdeltmean_inf,Scor_inf,tau_inf,tw_inf]=C_CMethod_inf(X,max_d); toc tau_inf tw_inf % 相关作图 figure('name','CC法求时间延迟'); plot(1:max_d,Smean_inf,'-b');hold on; plot(1:max_d,Sdeltmean_inf,'-*c');hold on; plot(1:max_d,Scor_inf,'-m');hold on; plot(1:max_d,zeros(1,max_d),'r'); title('C_CMethod_inf');xlabel('Lag'); legend('S(t)平均值','ΔS(t)平均值','Scor_inf'); % 将数据保持下来 fid=fopen('Smean_inf.txt','w'); fprintf(fid,'%f\n',Smean_inf); fclose(fid); fid=fopen('Sdeltmean_inf.txt','w'); fprintf(fid,'%f\n',Sdeltmean_inf); fclose(fid); fid=fopen('Scor_inf.txt','w'); fprintf(fid,'%f\n',Scor_inf); fclose(fid);
描点法画函数图象的一般步骤
一.选择题 1.下列各点在函数2 y x -= 的图象上的是() A.(-2,1); B.(0,-2); C.(1,2); D.(2,-2) 答案:A 2.如图,下列四种表示方式中,能表示变量y 是x 的函数的有() A.1个; B.2个; C.3个; D.4个 答案:B 3.已知点A (2,3)在函数y=mx 2-x+1的图象上,则m 等于() A.1; B.-1; C.2; D.-2 答案:A 4.若点(m ,n )在函数y=2x+1的图象上,则2m-n 的值是() A.2; B.-2; C.1; D.-1 答案:D 5.如图,在平面直角坐标系中,四边形OABC 是菱形,点C 的坐标为(4,0),∠AOC=60°,垂直于x 轴的直线l 从y 轴出发,沿x 轴正方向以每秒1个单位长度的速度向右平移,设直线l 与菱形OABC 的两边分别交于点M ,N (点M 在点N 的上方),若△OMN 的面积为S ,直线l 的运动时间为t 秒(0≤t ≤4),则能大致反映S 与t 的函数关系的图象是()
答案:C 6.如图,在平面直角坐标系中,点B(1,1),半径为1、圆心角为90°的扇形外周有一动点P,沿A→B→C→A运动一圈,则点P的纵坐标y随点P走过的路程s之间的函数关系用图象表示大致是() 答案:C 7.甲、乙两人在一次赛跑中,路程s与时间t的关系如图所示(实线为甲的路程与时间的关系图象,虚线为乙的路程与时间的关系图象),小王根据图象得到如下四个信息,其中错误的是()
A.这是一次1500米赛跑; B.甲,乙两人中先到达终点的是乙; C.甲,乙同时起跑;D.甲在这次赛跑中的速度为5米/秒 答案:C 8.某电信部门为了鼓励固定电话消费,推出新的优惠套餐:月租费10元;每月拔打市内电话在120分钟内时,每分钟收费0.2元,超过120分钟的每分钟收费0.1元;不足1分钟时按1分钟计费.则某用户一个月的市内电话费用y(元)与拔打时间t(分钟)的函数关系用图象表示正确的是() 答案:B 9.三峡工程在6月1日至6月10日下闸蓄水期间,水库水位由106米升至135米,高峡平湖初现人间,假设水库水位匀速上升,那么下列图象中,能正确反映这10天水位h(米)随时间t(天)变化的是() 答案:B
立体图形推理描点法图解-国家公务员考试网(学宝教育)
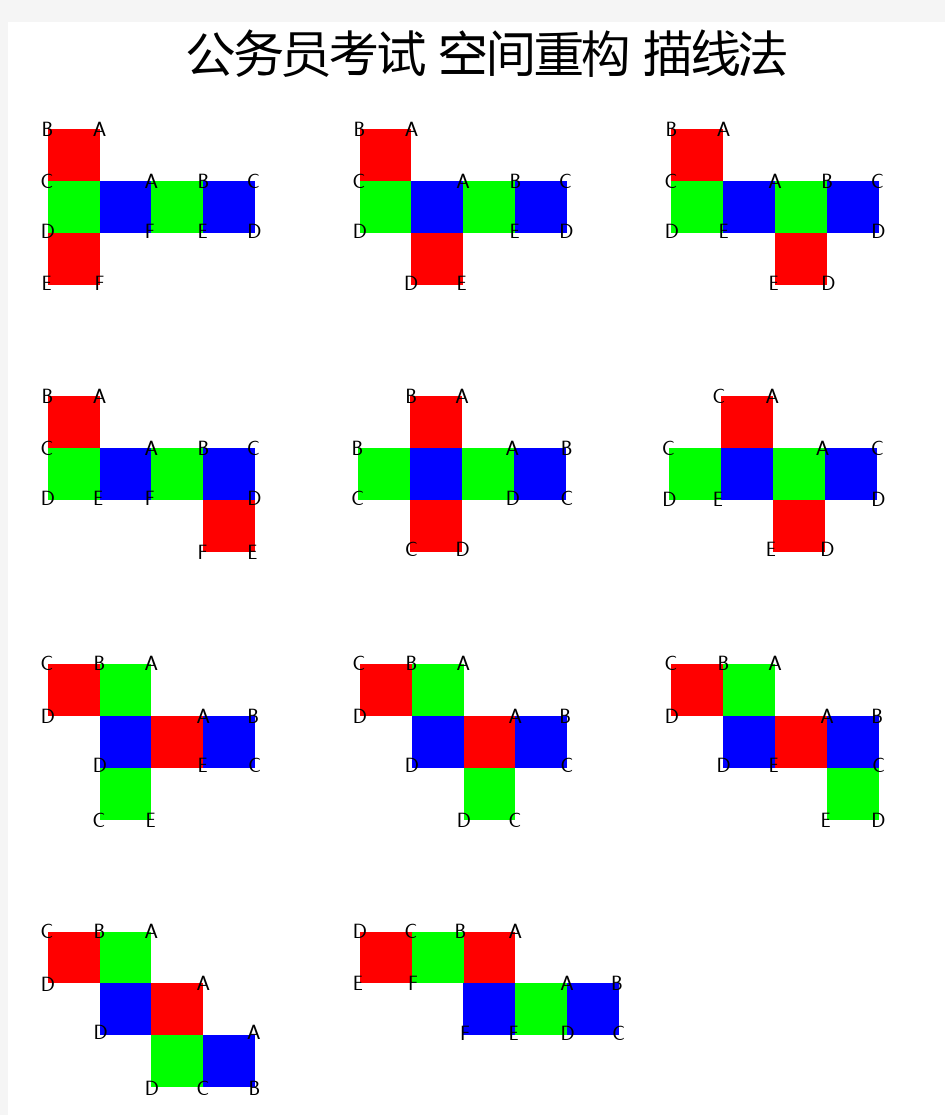
国家公务员考试行测图形推理模块有一类立体图形推理题--正四面体立体图形推理,通常用描点法秒杀这类立体图形推理更为快速简便。下面针对此类行测图形推理答题技巧进行图示方式的讲解。 【立体图形推理真题】 左边给定的是纸盒外表面的展开图,右边哪一项能由它折叠而成?请把它找出来。 【错误解析】 未见过正四面体的立体图形推理题,无从下手,没有解题思路。凭感觉B项好像正确,实际上错误。 对于空间立体图形题,直接放弃,想象不出。 【错解门诊】 出现上述这种情况,是因为对此类型题目没有思路,随便蒙了一个。其实这类题目,只要掌握一种简单的方法,就可以秒杀。 【正确解析】 A。我们可以将各选项图形可见的两个面展开在一个平面中,与左边给定图形进行对比,快速推出答案。经展开对比可知,B项右侧面上的线段应与公共边相交,排除。C项右侧面内应该是小三角形,排除。D项左侧面内应该是小三角形,排除。A项正确。 【指点迷津】 立体图形推理题主要考查考生的空间想象力,对于空间想象能力差的考生来讲,这无疑是痛苦的。下面讲解一下秒杀正四面体立体图形推理的方法,即描点法与公共边法相结合的方法。 描点法就是根据已知点确定由这个点出发的线条的情况,从而确定“纸盒”的形式。通过描点,可以直观发现立体图形展开图中相邻面的公共点与公共边。公共边法即在正四面体的立体图形视图中,两个面之间存在一条公共边。只需要判断这条公共边与展开图形中的边是否对应,即可判断该立体图形的正误。 在运用公共边法之前,我们首先需要运用描点法,对正四面体进行简单描点处理。 描点技巧:(1)只使用A~D四个字母,且同一个小三角形中三个字母不同;(2)若一条线上有三个点,相邻两点字母不同,首尾两点字母相同。 题干图形描点如下:
空间中线线角,线面角,面面角成法原理与求法思路
D B A C α 空间中的夹角 福建屏南一中 李家有 QQ52331550 空间中各种角包括:异面直线所成的角、直线与平面所成的角以及二面角。 1、异面直线所成的角 (1)异面直线所成的角的范围是2 , 0(π 。求两条异面直线所成的角的大小一般方法是通过平行移动 直线,把异面问题转化为共面问题来解决。 具体步骤如下: ①利用定义构造角,可固定一条,平移另一条,或两条同时平移到某个特殊的位置,顶点选择在特殊的位置上; ②证明作出的角即为所求的角; ③利用解三角形来求角。简称为“作,证,求” 2、线面夹角 直线与平面所成的角的范围是]2 , 0[π 。求直线和平面所成的角用的是射影转化法。 具体步骤如下:(若线面平行,线在面内,线面垂直,则不用此法,因为角度不用问你也知道) ①找过斜线上一点与平面垂直的直线; ②连结垂足和斜足,得出斜线在平面的射影,确定出所求的角; ③把该角置于三角形中计算。 也是简称为“作,证,求” 注:斜线和平面所成的角,是它和平面内任何一条直线所成的一切角中的最小角,即若θ为线面角,β为斜线与平面内任何一条直线所成的角, 则有θβ≤;(这个证明,需要用到正弦函数的单调性,请跳过。在右图的解释为 BAD CAD ∠>∠) ) 2.1确定点的射影位置有以下几种方法: ①斜线上任意一点在平面上的射影必在斜线在平面的射影上; ②如果一个角所在的平面外一点到角的两边距离相等,那么这一点在平面上的射影在这个角的平分线上; 已知:如图,BAC ∠在一个平面α内, ,,PN AC PM AB PN PM ⊥⊥且=(就是点P 到角 两边的距离相等)过P 作PO α⊥(说明点O 为P 点在面α内的射影) 求证:OAN OAM ∠∠= (OAN OAM ∠∠=,所以AO 为BAC ∠的角平分线,所以点O 会在BAC ∠的角平分线上) 证明: PA =PA ,PN =PM ,90PNA PMA ∠∠?== PNA PMA ∴???(斜边直角边定理) AN AM ∴= ①
描点法画函数图象的一般步骤
一.选择题 1.下列各点在函数 2 y x - =的图象上的是() A.(-2,1); B.(0,-2);C.(1,2); D.(2,-2)答案:A 2.如图,下列四种表示方式中,能表示变量y是x的函数的有() A.1个;B.2个;C.3个;D.4个 答案:B 3.已知点A(2,3)在函数y=mx2-x+1的图象上,则m等于() A.1; B.-1; C.2;D.-2 答案:A 4.若点(m,n)在函数y=2x+1的图象上,则2m-n的值是() A.2; B.-2;C.1; D.-1 答案:D 5.如图,在平面直角坐标系中,四边形OABC是菱形,点C的坐标为(4,0),∠AOC=60°,垂直于x轴的直线l从y轴出发,沿x轴正方向以每秒1个单位长度的速度向右平移,设直线l与菱形OABC的两边分别交于点M,N(点M在点N的上方),若△OMN的面积为S,直线l的运动时间为t秒(0≤t≤4),则能大致反映S与t的函数关系的图象是()
答案:C 6.如图,在平面直角坐标系中,点B(1,1),半径为1、圆心角为90°的扇形外周有一动点P,沿A→B→C→A运动一圈,则点P的纵坐标y随点P走过的路程s之间的函数关系用图象表示大致是() 答案:C 7.甲、乙两人在一次赛跑中,路程s与时间t的关系如图所示(实线为甲的路程与时间的关系图象,虚线为乙的路程与时间的关系图象),小王根据图象得到如下四个信息,其中错误的是()
A.这是一次1500米赛跑; B.甲,乙两人中先到达终点的是乙; C.甲,乙同时起跑; D.甲在这次赛跑中的速度为5米/秒 答案:C 8.某电信部门为了鼓励固定电话消费,推出新的优惠套餐:月租费10元;每月拔打市内电话在120分钟内时,每分钟收费0.2元,超过120分钟的每分钟收费0.1元;不足1分钟时按1分钟计费.则某用户一个月的市内电话费用y(元)与拔打时间t(分钟)的函数关系用图象表示正确的是() 答案:B 9.三峡工程在6月1日至6月10日下闸蓄水期间,水库水位由106米升至135米,高峡平湖初现人间,假设水库水位匀速上升,那么下列图象中,能正确反映这10天水位h(米)随时间t(天)变化的是() 答案:B 二.填空题 10.描点法画函数图象的一般步骤是: ; ;。 答案:列表;描点;连线 11.在画函数图象的过程中,若某个点不在函数图象上,则用圈表示它;若某个点在函数图象上,则用圈表示它。
描点法画函数图象的一般步骤
一.选择题 1.下列各点在函数 2 y x - =的图象上的是() A.(-2,1); B.(0,-2); C.(1,2); D.(2,-2) 答案:A 2.如图,下列四种表示方式中,能表示变量y是x的函数的有() A.1个; B.2个; C.3个; D.4个 答案:B 3.已知点A(2,3)在函数y=mx2-x+1的图象上,则m等于() A.1; B.-1; C.2; D.-2 答案:A 4.若点(m,n)在函数y=2x+1的图象上,则2m-n的值是() A.2; B.-2; C.1; D.-1 答案:D 5.如图,在平面直角坐标系中,四边形OABC是菱形,点C的坐标为(4,0),∠AOC=60°,垂直于x轴的直线l从y轴出发,沿x轴正方向以每秒1个单位长度的速度向右平移,设直线l与菱形OABC的两边分别交于点M,N(点M在点N的上方),若△OMN的面积为S,直线l的运动时间为t秒(0≤t≤4),则能大致反映S与t的函数关系的图象是() 答案:C 6.如图,在平面直角坐标系中,点B(1,1),半径为1、圆心角为90°的扇形外周有一动点P,沿A→B→C→A运动一圈,则点P的纵坐标y随点P走过的路程s之间的函数关系用图象表示大致是()
答案:C 7.甲、乙两人在一次赛跑中,路程s与时间t的关系如图所示(实线为甲的路程与时间的关系图象,虚线为乙的路程与时间的关系图象),小王根据图象得到如下四个信息,其中错误的是() A.这是一次1500米赛跑; B.甲,乙两人中先到达终点的是乙; C.甲,乙同时起跑;D.甲在这次赛跑中的速度为5米/秒 答案:C 8.某电信部门为了鼓励固定消费,推出新的优惠套餐:月租费10元;每月拔打市内在120分钟内时,每分钟收费0.2元,超过120分钟的每分钟收费0.1元;不足1分钟时按1分钟计费.则某用户一个月的市内费用y(元)与拔打时间t(分钟)的函数关系用图象表示正确的是() 答案:B 9.三峡工程在6月1日至6月10日下闸蓄水期间,水库水位由106米升至135米,高峡平湖初现人间,假设水库水位匀速上升,那么下列图象中,能正确反映这10XX位h(米)随时间t(天)变化的是()
用描点法比较溶质的质量分数
用描点法比较溶质的质量分数 摘要:将固体物质的溶解度曲线与溶解度的定义、饱和溶液与不饱和溶液的转化、溶质质量分数的变化与比较等知识综合起来进行命题, 成为近年中考的热点题型。这样的命题要求学生识别图像获取相关信息,理解与信息有关的化学知识,对化学知识进行分析推理, 从而解决与原化学知识相关的"新"问题。增加了知识的深度,提高了学生综合应用知识的能力。 关键词:溶解度曲线、饱和溶液、不饱和溶液、溶质质量分数、描点法 溶解度曲线是中学化学的重点,根据溶解度曲线进行溶质质量分数的比较更是学生学习的难点。教师要引导学生由溶解度的定义推导饱和溶液的溶质质量分数与同一温度下的溶解度的换算关系,根据溶解度曲线分析温度对溶解度的影响,比较同种溶质在不同温度下的饱和溶液中溶质的质量分数,学会用描点法比较不同种溶质在同一温度下的饱和溶液中溶质的质量分数,分析改变饱和溶液的温度后所得溶液中溶质的质量分数的变化,用描点法比较在相同温度范围内改变饱和溶液的温度后所得溶液中溶质的质量分数。让学生在不断深入的过程中,加深对溶解度曲线的理解,提高解决图像类题目的能力,发展他们的逻辑思维。 一、溶解度的定义 固体物质的溶解度:一定温度下,某固体物质在100g 溶剂里达到饱和状态时所溶解的质量。它有四个要素:①在一定温度下。 ②在100g 溶剂里。③达到饱和状态。④被溶解的溶质的质量,没有溶解的部分溶质不能计入。 二、由溶解度计算同一温度下饱和溶液中溶质的质量分数 在t ℃时,溶质A 在水中的溶解度为Sg ,该怎样计算t ℃时A 的饱和溶液中溶质的质量分数?根据溶解度的定义,在t ℃时,Sg 溶质A 完全溶解在100g 水中得到(100+S )g 溶液,可以得出: 结论1:%100100 ?+= s s 分数饱和溶液中溶质的质量 能使用该计算公式的前提条件是形成某一温度下的饱和溶液(比如图1中E 点对应的溶液)。未达到饱和状态时溶质的质量分数小于 %100100 ?+s s (比如图1