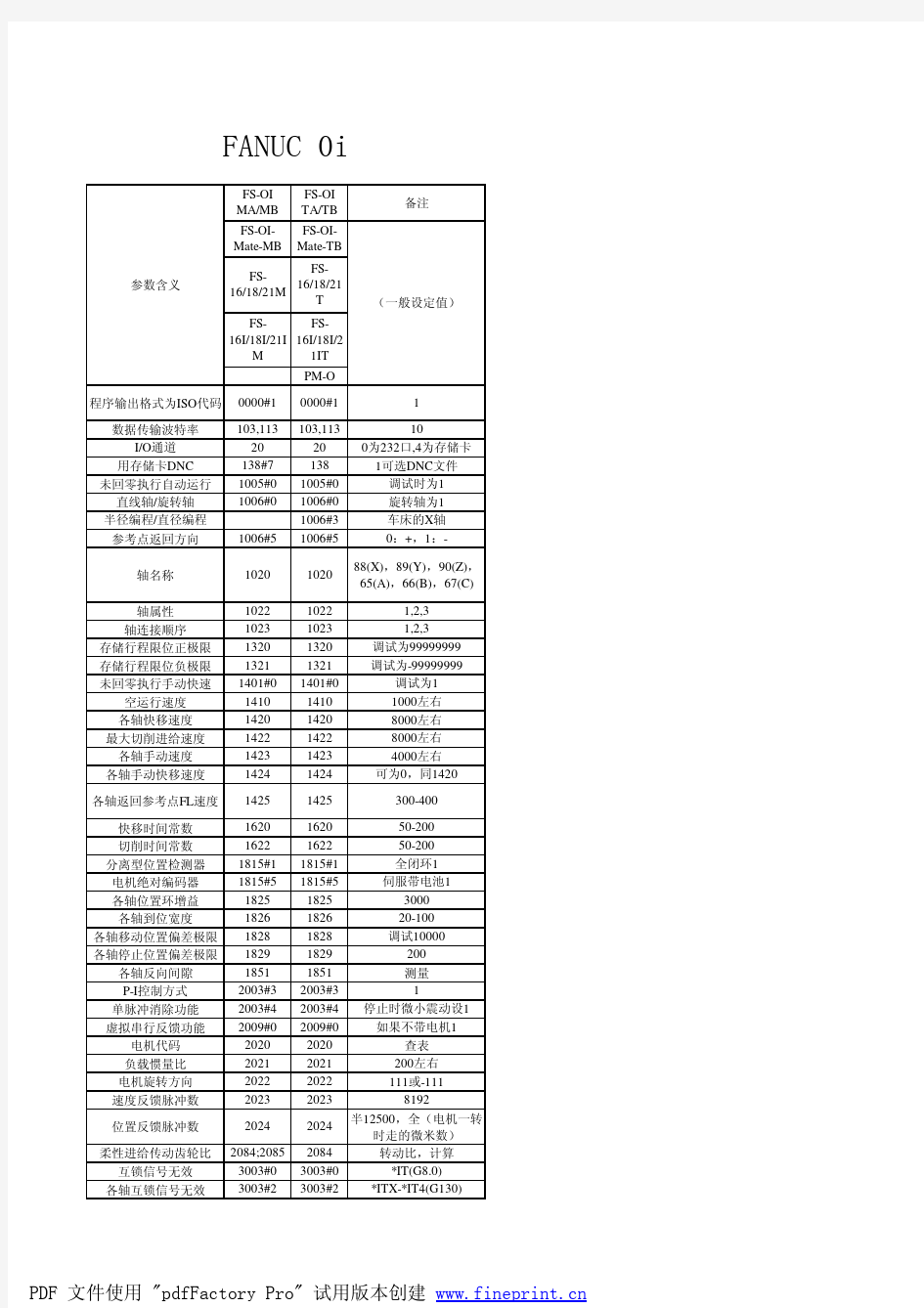
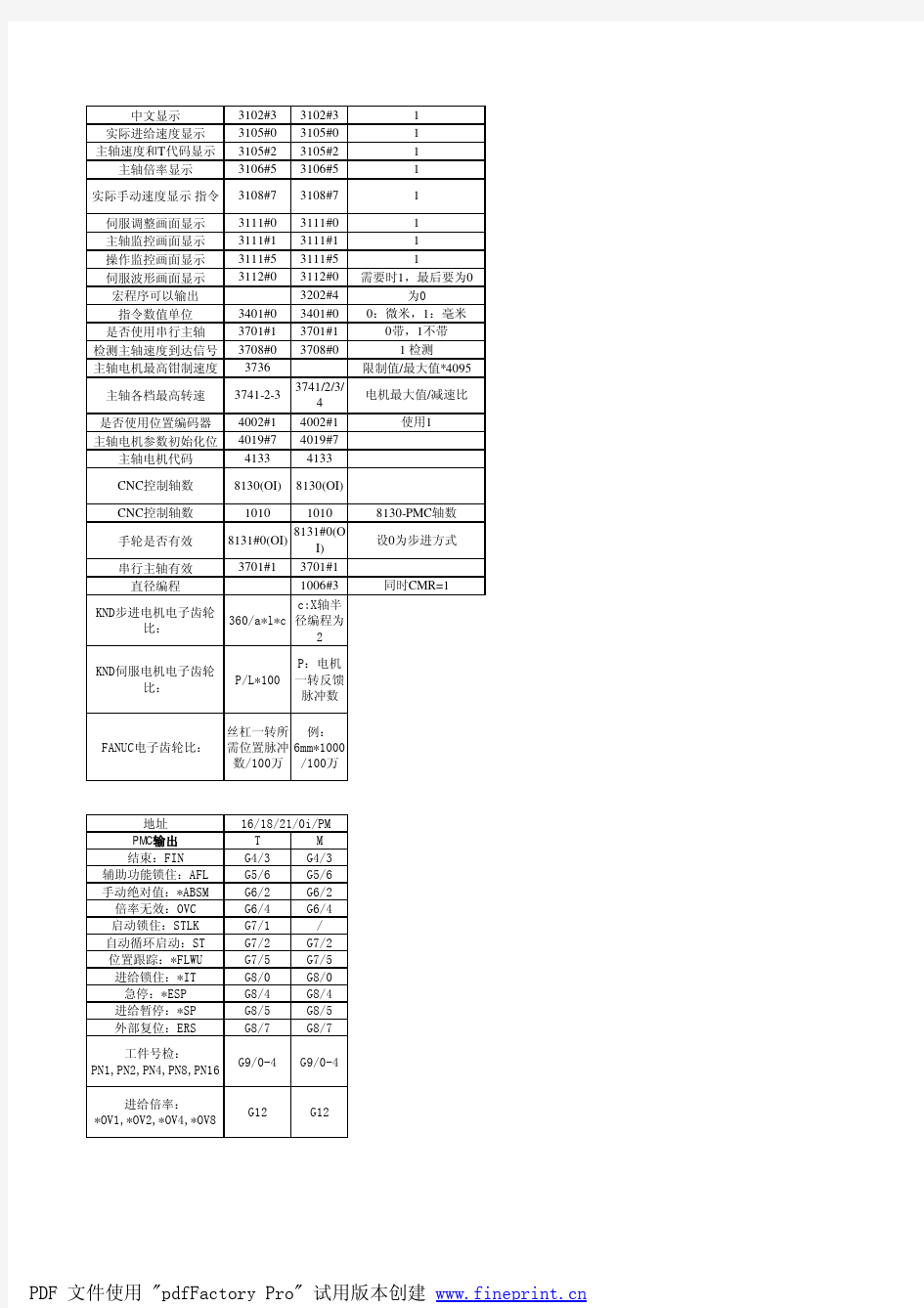
FANUC 0i常用参数及pmc诊断信号地址
贴片电容系列材质及规格
贴片电容材质及规格 贴片电容目前使用NPO、X7R、Z5U、Y5V等不同的材质规格,不同的规格有不同的用途。 NPO、X7R、Z5U和Y5V的主要区别是它们的填充介质不同。在相同的体积下由于填充介质不同所组成的电容器的容量就不同,随之带来的电容器的介质损耗、容量稳定性等也就不同。所以在使用电容器时应根据电容器在电路中作用不同来选用不同的电容器。 下面我们仅就常用的NPO、X7R、Z5U和Y5V来介绍一下它们的性能和应用以及采购中应注意的订货事项以引起大家的注意。不同的公司对于上述不同性能的电容器可能有不同的命名方法,这里我们引用的是敝司三巨电子公司的命名方法,其他公司的产品请参照该公司的产品手册。 一NPO电容器 NPO是一种最常用的具有温度补偿特性的单片陶瓷电容器。它的填充介质是由铷、钐和一些其它稀有氧化物组成的。 NPO电容器是电容量和介质损耗最稳定的电容器之一。在温度从-55℃到+125℃时容量变化为0±30ppm/℃,电容量随频率的变化小于±0.3ΔC。NPO电容的漂移或滞后小于±0.05%,相对大于±2%的薄膜电容来说是可以忽略不计的。其典型的容量相对使用寿命的变化小于±0.1%。NPO电容器随封装形式不同其电容量和介质损耗随频率变化的特性也不同,大封装尺寸的要比小封装尺寸的频率特性好。NPO电容器适合用于振荡器、谐振器的槽路电容,以及高频电路中的耦合电容。 二X7R电容器 X7R电容器被称为温度稳定型的陶瓷电容器。当温度在-55℃到+125℃时其容量变化为15%,需要注意的是此时电容器容量变化是非线性的。 X7R电容器的容量在不同的电压和频率条件下是不同的,它也随时间的变化而变化,大约每10年变化1%ΔC,表现为10年变化了约5%。 X7R电容器主要应用于要求不高的工业应用,而且当电压变化时其容量变化是可以接受的条件下。它的主要特点是在相同的体积下电容量可以做的比较大。 三Z5U电容器 Z5U电容器称为”通用”陶瓷单片电容器。这里首先需要考虑的是使用温度范围,对于Z5U电容器主要的是它的小尺寸和低成本。对于上述三种陶瓷单片电容起来说在相同的体积下Z5U电容器有最大的电容量。但它的电容量受环境和工作条件影响较大,它的老化率最大可达每10年下降5%。 尽管它的容量不稳定,由于它具有小体积、等效串联电感(ESL)和等效串联电阻(ESR)低、良好的频率响应,使其具有广泛的应用范围。尤其是在退耦电路的应用中。 Z5U电容器的其他技术指标如下: 工作温度范围+10℃--- +85℃ 温度特性+22% ---- -56% 介质损耗最大4%
FANUC 0i 系统参数
伺服参数: 1020:轴号(88 89 90 ) 1013#1=0,IS-B设定 1022 1023:轴名(1 2 3) 1006#0#1=0,直线轴 2020:电机号(代码) 1815#1=1:使用分离脉冲编码器 2021:负载惯量比3002#4=0,倍率相关得信号逻辑不变2165:放大器最大电流值1815#4=0得原因显示诊断310 311中2022:电机旋转方向(111 -111) 20=4,138=7:存储卡加工有效 2023: 速度脉冲数(8192)=快移速度/(60X增益) 2024: 位置脉冲数(12500 半闭环) 全闭环:丝杠螺距/光栅尺分辨率 2185:位置脉冲数转换系数(位置脉冲数>32767时) 2084:柔性进给齿轮比(分子) 2085:柔性进给齿轮比(分母 柔性齿轮比=电机旋转一周所需得位置脉冲/100万 1010:CNC控制轴数 8130:总控制轴数 1820:指令倍乘比=(指令到位/检测单位)X2 1821:参考计数器容量 1825:各轴伺服环增益 1826:各轴到位宽度 1827:各轴到位宽度(切削进给) 1801#4:CCI切削进给时得到位宽度0:使用1826 1:专用1827 1828:移动中最大偏差 1829:停止时最大偏差 1850:栅格偏移量或参考点偏移量 2000#0=1,使参数(2023 2024)得值增大10倍 #1=0,进行数字伺服参数得初始设定 1803#1,就是否在到位极限中进行停止/移动中误差过大得检查0:进行1:不进行 1804#4:在VRDY OFF忽略信号处于1得状态执行紧急停止时0:为0之前不会解除紧急停止1:解除 #5=0:在检测异常负载情况下使所有轴停止并报警 #6:当VRDY OFF报警忽略为1或各轴VRDY OFF为1时(0:伺服准备就绪信号SA为0 1:SA=1) 1311#0=1:刚通电后得存储行程限位检测有效 1300#6=0:进行手动回零前存储行程检测(1311#0=1时) 1301#6=0:超程信号不向PMC输入 #7:就是否进行移动前行程检测0:不进行1:进行 3111#0=1:显示伺服设定画面 3111#5=1:予以进行操作监视显示 #6=1:操作监视画面得速度表上就是主轴速度0:主轴电机速度 3160:MDI单元类别设定 3202#0 NE8=1,禁止8000-8999程序编辑#4=1 NE9 禁止9000-9999程序编辑#6使受到保护得程序得号检索0:无效1:有效 3290#7:存储器保护信号0:使用KEY1、2、3、4信号(G46、3-G46、6) 1:仅使用KEY1信号(G46、3)
各种贴片电容容值规格参数表
各种贴片电容容值表 X7R贴片电容简述 X7R贴片电容属于EIA规定的Class 2类材料的电容。它的容量相对稳定。X7R贴片电容特性 具有较高的电容量稳定性,在-55℃~125℃工作温度围,温度特性为±15%。层叠独石结构,具有高可靠性。 优良的焊接性和和耐焊性,适用于回流炉和波峰焊。 应用于隔直、耦合、旁路、鉴频等电路中。 X7R贴片电容容量围 厚度与符号对应表 0201~1206 X7R贴片电容选型表
1210~2225 X7R贴片电容选型表
NPO COG 贴片电容容量规格表 默认分类 2009-07-15 16:28 阅读354 评论1 字号:大大中中小小 NPO(COG)贴片电容属于Class 1温度补偿型电容。它的容量稳定,几乎不随温度、电压、时间的变化而变化。尤其适用于高频电子电路。 具有最高的电容量稳定性,在-55℃~125℃工作温度围,温度特性为:0±30ppm/℃(COG)、0±60ppm/℃(COH)。 层叠独石结构,具有高可靠性。 优良的焊接性和和耐焊性,适用于回流炉和波峰焊。 应用于各种高频电路,如:振荡、计时电路等。
我们把用来制造片式多层瓷介电容(MLCC)的瓷叫电容器瓷。这里所说的瓷介就是用电容器瓷制成的瓷介质。大家知道,瓷是一类质硬、性脆的无机烧结体。就其显微结构而论,大都具有多晶多相结构。其性能往往决定于其成份和结构。当配方确定之后,能否达到预期的效果,关键取决于制造瓷粉料的工艺。 按其用途可以分为三类:①高频热补偿电容器瓷(UJ、SL);②高频热稳定电容器瓷(NPO); ③低频高介电容器瓷(X7R、Y5V、Z5U)。 按温度系数分可以分为两类:①负温度系数电容器瓷(即高频热补偿电容器瓷);②正温度系数电容器瓷(即平时我们常说的COG、X7R、Y5V瓷料)。 按工作频率可以分为三类:低频、高频、微波介质。
FANUC 0i含车铣程序指令使用方法
Fanuc系统数控车床设置工件零点常用方法 1.直接用刀具试切对刀 1.用外园车刀先试车一外园,记住当前X坐标,测量外园直径后,用X坐标减外园直径,所的值输 入offset界面的几何形状X值里。 2.用外园车刀先试车一外园端面,记住当前Z坐标,输入offset界面的几何形状Z值里。 2.用G50设置工件零点 1.用外园车刀先试车一外园,测量外园直径后,把刀沿Z轴正方向退点,切端面到中心。 2.选择MDI方式,输入G50 X0 Z0,启动START键,把当前点设为零点。 3.选择MDI方式,输入G0 X150 Z150 ,使刀具离开工件进刀加工。 4.这时程序开头:G50 X150 Z150 …….。 5.注意:用G50 X150 Z150,你起点和终点必须一致即X150 Z150,这样才能保证重复加工不 乱刀。 6.如用第二参考点G30,即能保证重复加工不乱刀,这时程序开头G30 U0 W0 G50 X150 Z150 7.在FANUC系统里,第二参考点的位置在参数里设置,在Yhcnc软件里,按鼠标右键出现对话框, 按鼠标左键确认即可。 3.用工件移设置工件零点 1.在FANUC0-TD系统的Offset里,有一工件移界面,可输入零点偏移值。 2.用外园车刀先试切工件端面,这时Z坐标的位置如:Z200,直接输入到偏移值里。 3.选择“Ref”回参考点方式,按X、Z轴回参考点,这时工件零点坐标系即建立。 4.注意:这个零点一直保持,只有从新设置偏移值Z0,才清除。 4.用G54-G59设置工件零点 1.用外园车刀先试车一外园,测量外园直径后,把刀沿Z轴正方向退点,切端面到中心。 2.把当前的X和Z轴坐标直接输入到G54----G59里,程序直接调用如:G54X50Z50……。 3.注意:可用G53指令清除G54-----G59工件坐标系。 Fanuc系统数控车床常用固定循环G70-G80祥解 1.外园粗车固定循环(G71) 如果在下图用程序决定A至A’至B的精加工形状,用△d(切削深度)车掉指定的区域,留精加工预 留量△u/2及△w。 G71U(△d)R(e) G71P(ns)Q(nf)U(△u)W(△w)F(f)S(s)T(t)
传感器与信号处理电路习题答案
第1章 传感器与检测技术基础 1.某线性位移测量仪,当被测位移由4.5mm 变到5.0mm 时,位移测量仪的输出电压由3.5V 减至 2.5V ,求该仪器的灵敏度。 解:该仪器的灵敏度为 25 .40.55.35.2-=--=S V/mm 2.某测温系统由以下四个环节组成,各自的灵敏度如下: 铂电阻温度传感器: 0.45Ω/℃ 电桥: 0.02V/Ω 放大器: 100(放大倍数) 笔式记录仪: 0.2cm/V 求:(1)测温系统的总灵敏度; (2)记录仪笔尖位移4cm 时,所对应的温度变化值。 解: (1)测温系统的总灵敏度为 18.02.010002.045.0=???=S cm/℃ (2)记录仪笔尖位移4cm 时,所对应的温度变化值为 22.2218 .04==t ℃ 6.有三台测温仪表,量程均为0~800℃,精度等级分别为2.5级、2.0级和1.5级,现要测量500℃的温度,要求相对误差不超过2.5%,选那台仪表合理? 解:2.5级时的最大绝对误差值为20℃,测量500℃时的相对误差为4%;2.0级时的最大绝对误差值为16℃,测量500℃时的相对误差为3.2%;1.5级时的最大绝对误差值为12℃,测量500℃时的相对误差为2.4%。因此,应该选用1.5级的测温仪器。 10.试分析电压输出型直流电桥的输入与输出关系。 答:如图所示,电桥各臂的电阻分别为R 1、 R 2、 R 3、R 4。U 为电桥的直流电源电压。当四臂电阻R 1=R 2=R 3=R 4=R 时,称为等臂电桥;当R 1=R 2=R ,R 3=R 4=R ’(R ≠R ’)时,称为输出对称电桥;当R 1=R 4=R ,R 2=R 3 =R ’(R ≠R ’)时,称为电源对称电桥。 D 直流电桥电路 当电桥输出端接有放大器时,由于放大器的输入阻抗很高,所以可以认为电桥的负载电阻为无穷大,这时电桥
通信原理报告 数字基带信号HDB3码型编码转换实现
通信原理课程设计报告 题目:数字基带信号HDB3码型编码转换实现 专业班级: 姓名: 学号: 指导教师:
设计任务要求: 仿真实现数字基带通信系统信源输入24位二进制序列产生HDB3码,通过高斯白噪声信道,接收端滤波、解码的时域图及频谱图。以矩形波为例,要求实现输入24位二进制序列产生AMI码,HDB3码,接收端滤波、解码上述码型。
摘要 HDB3码全称三阶高密度双极性码(英语:High Density Bipolar of Order 3,简称:HDB3码)是一种适用于基带传输的编码方式,它是为了克服AMI码的缺点而出现的,具有能量分散,抗破坏性强等特点。HDB3码实行转换一般分为三个步骤,先将消息码转换AMI码然后加“V”,接着加“B”,这几部我们可以使用C语言进行编程实现。为了实现HDB3码的编码与转换,同时加深对通信系统工作原理的了解,我们采用了MATLAB软件进行编码仿真,同时学习掌握MATLAB软件的基础使用。 关键词:AMI码;HDB3码;编码;解码;MATLAB;仿真
目录 1. 设计原理 (4) 1.1 HDB3码的介绍 (4) 1.2 HDB3码的编码转换规则 (5) 1.3 HDB3码的解码转换规则 (5) 1.4 HDB3码的软件程序设计 (6) 2. MATLAB软件仿真结果及其分析 (10) 2.1 MATLAB软件的介绍 (10) 2.2 仿真结果图示 (12) 2.3 仿真结果分析 (15) 3. 设计总结及心得体会 (22) 4. 参考文献 (22) 5. 致谢 (23)
正文 1.设计原理 1.1 HDB3码的介绍 HDB3码即三阶高密度双极性码(英语:High Density Bipolar of Order 3,简称:HDB3码)是一种适用于基带传输的编码方式,“三阶”通俗讲就是最多3个连0码元,“高密度双极性”就是没有直流分量,不会连续出现+1或-1,它是为了克服AMI码的缺点而出现的,具有能量分散,抗破坏性强等特点。 三阶高密度双极性码用于所有层次的欧洲E-carrier系统,HDB3码将4个连续的"0"位元取代成"000V"或"B00V"。这个做法可以确保连续的相隔单数的一般B记号。 1.2 HDB3的编码转换规则 HDB3码的编码规则主要分为3步: 1 .先将消息代码变换成AMI码,若AMI码中连0的个数小于4,此时的AMI 码就是HDB3码; 2 .若AMI码中连0的个数大于等于4,则将每4个连0小段的第4个0变换成与前一个非0符号(+1或-1)同极性的符号,用表示(+V,-V);
FANUC数控系统故障诊断及参数的恢复调试-最新文档
FANUC数控系统故障诊断及参数的恢复调试 某厂生产的CK6150数控车床,采用FANUC 0i-mate数控系统,开机后出现报警信息:“970 NMI OCCURRED IN PMCLSI”,机床无法启动。查阅相关资料知,该报警的含义是:PMCLSI内部发生NMI(非屏蔽中断)或RAM出现奇偶错误,故笔者初步断定数控系统出现故障,需进行诊断与维修。 1 数控系统硬件故障的诊断维修 FANUC 0i-mate数控系统采用模块化结构,母板上安装有各种功能的子卡,如轴控制卡、显示卡、CPU卡、FROM/SRAM卡及模拟主轴模块等,系统由输出电压为直流24伏的电源单元供电。由于本单位有相同类型的数控系统,故维修诊断采用替换法进行。为确保替换上的板卡不出现意外,笔者对供电模块进行了检查,经测量,该模块供电电压稳定输出在直流24 V,工作正常,可以进行板卡的替换维修工作。首先替换母板,上电后系统依然报警,无法启动,考虑到系统的显示功能工作正常,接着分别更换了轴卡及CPU卡,上电后,系统终于可以正常启动了,由此确定系统的母板(型号为:A20B-8101-0285/02A)、轴卡(型号为:A20B-3300-0393/02A)、CPU卡(型号为:A20B-3300-029/04C)已损坏,需要更换。至此,数控系统硬件故障的诊断维修工作初步完成。 2 数控系统用户参数的恢复与调试
在更换了数控系统的母板、轴卡、CPU卡后,系统虽然能正常启动,但依然出现了“935”号报警,即用来存储参数和加工程序等数据的SRAM发生了ECC错误。我们知道,在FROM/SRAM 卡里,存储有CNC系统软件及机床厂家开发的用户程序(PMC梯形图)等,开机后,系统软件和用户软件只有正常登录到DRAM 模块和伺服卡上的RAM后,数控机床才能正常工作。一般情况下,FANUC系统自带的系统软件用户是无法删除的,出现错误的应是机床厂家开发的用户软件。 造成此错误的可能原因有三个:一是锂电池没电,导致FROM/SRAM卡内的数据丢失;二是FROM/SRAM卡内的数据被破坏,如进行了上电清零操作;三是FROM/SRAM卡本身损坏。前期进行硬件维修时,已对锂电池及FROM/SRAM卡进行了检查,硬件本身无故障,故确定FROM/SRAM卡内数据已破坏或丢失,需要恢复数据后机床才能正常工作。但由于单位维修人员多次更换,无法找到机床原始参数,联系机床厂家,该单位因各种原因已处于停产状态,也无法提供原始参数。另外,在笔者维修此故障前,前一维修人员在维修时对机床进行了清零操作,而在清零前又没有及时对数据进行备份,无奈之下,笔者只能依据FANUC公司提供的维修手册及机床说明书,同时结合本机床的实际情况,对主轴参数、伺服参数等进行恢复与调试。 2.1 伺服参数及主轴参数的初始化 参数的初始化主要有伺服参数的初始化及主轴参数的初始
几种常见传感器总结
几种常见传感器总结 1、红外对管: 红外对管是根据红外辐射式传感器原理制作的一种红外对射式传感器。与一般红外传感器一样,红外对管也由三部分构成:光学系统(发射管)、探测器(接收管)、信号调理及输出电路。红外探测器是利用红外辐射与物质相互作用所呈现的物理效应来探测红外辐射的。在此接收管通过对发射管所发出的红外线做出反应实现,实现信号的采集,再通过后续信号处理电路完成信号的采集和输出。 2、霍尔传感器: 霍尔传感器是基于霍尔效应的一种传感器。霍尔效应是指置于磁场中的静止载流导体, 当它的电流方向与磁场方向不一致时, 载流导体上平行于电流和磁场方向上的两个面之间产生电动势的现象。该电势称霍尔电势。霍尔传感器是利用霍尔效应实现磁电转换的一种传感器,它具有灵敏度高,线性度好,稳定性高、体积小和耐高温等特点。对测速装置的要求是分辨能力强、高精度和尽可能短的检测时间。目前市场上的霍尔传感器都是集成了外围的测量电路输出的是数字信号,即当传感器检测到磁场时将输出高低电平信号。传感器主要包括两部分,一为检测部分的霍尔元件,一为提供磁场的磁钢。霍尔电流传感器反应速度一般在7微妙,根本不用考虑单片机循环判断的时间. 3、光电开关: 光电开关是一种利用感光元件对变化的入射光加以接收, 并进行光电转换, 同时加以某种形式的放大和控制, 从而获得最终的控制输出“开”、“关”信号的器件。上图为典型的光电开关结构图。是一种反射式的光电开关,它的发光元件和接收元件的光轴在同一平面且以某一角度相交,交点一般即为待测物所在处。当有物体经过时, 接收元件将接收到从物体表面反射的光, 没有物体时则接收不到。透射式的光电开关, 它的发光元件和接收元件的光轴是重合的。当不透明的物体位于或经过它们之间时, 会阻断光路, 使接收元件接收不到来自发光元件的光, 这样起到检测作用。光电开关的特点是小型、高速、非接触, 而且与TTL、MOS等电路容易结合。此类传感器目前也多为开关量传感器,输出的为1,0开关量信号,可以和单片机直接连接使用。光电开关广泛应用于工业控制、自动化包装线及安全装置中作光控制和光探测装置。可在自控系统中用作物体检测,产品计数, 料位检测,尺寸控制,安全报警及计算机输入接口等用途。 4、超声波传感器: 利用超声波在超声场中的物理特性和各种效应而研制的装置可称为超声波换能器、探测器或传感器。超声波探头按其工作原理可分为压电式、磁致伸缩式、电磁式等, 而以压电式最为常用。压电式超声波探头常用的材料是压电晶体和压电陶瓷, 这种传感器统称为压电式超声波探头。它是利用压电材料的压电效应来工作的: 逆压电效应将高频电振动转换成高频机械振动, 从而产生超声波, 可作为发射探头; 而利用正压电效应, 将超声振动波转换成电信号, 可用为接收探头。超声波探头主要由压电晶片组成,既可以发射超声波,也可以接收超声
发那科0i mate-TC数控系统参数的设置方法
发那科0i mate-TC数控系统参数的设置方法 摘要:数控系统参数设置的正确与否直接影响数控机床的使用,本文介绍了发那科0i mate-TC数控系统参数设置的方法,通过对参数设置过程的描述,便于掌握此系统参数的设置方法和参数设置过程中的注意事项。 关键词:数控系统参数设置 无论哪个公司的数控系统都有大量的参数,有的一项参数又有八位,粗略计算起来一套CNC系统配置的数控机床就有近千个参数要设定。这些参数设置正确与否直接影响数控机床的使用和其性能的发挥。特别是用户能充分掌握和熟悉这些参数的设置,将使一台数控机床的使用和性能发挥上升到一个新的水平,也给数控机床的故障诊断和维修带来很大的方便,参数的修改还可以开发CNC系统某些在数控机床订购时没有表现出来的功能,对二次开发会有一定的帮助。 1.显示参数的操作 1)按MDI面板上的“SYSTEM”功能键数次,或者按“SYSTEM”功能键一次,再按[参数]软键,选择参数画面。 2)参数画面由多页组成,可以通过以下两种方法选择需要显示的参数所在的画面。 (1)用光标移动键或翻页键,显示需要的画面。 (2)由键盘输入要显示的参数号,然后按下[搜索]软健,这样可显示指定参数所在的页面,光标同时处于指定参数的位置。 2.用MDI设定参数 1)在操作面板上选择MDI方式或急停状态。 2)按下“OFS/SET”功能键,再按[设定]软键,可显示设定画面的第一页。 3)将光标移动到“参数写入”处,按[操作]软键,进入下一级画面。 4)按[NO:1]软键或输入1,再按[输入]软键,将“参数写入”设定为1;这样参数处于可写入状态,同时CNC发生100号报警。 5)按“SYSTEM”功能键,再按[参数]软键,进入参数画面,找到需要设定参数的画面,将光标置于需要设定的位置上。 6)输入参数,然后按“INPUT”键,输入的数据将被设定到光标指定的参数中;
各种传感器的分类、比较和应用
传感器的定义传感器是一种能把物理量或化学量转变成便于利用的电信号的器件。国际电工委员会(IEC:International Electrotechnical Committee)的定义为:“传感器是测量系统中的一种前置部件,它将输入变量转换成可供测量的信号”。按照Gopel等的说法是:“传感器是包括承载体和电路连接的敏感元件”,而“传感器系统则是组合有某种信息处理(模拟或数字)能力的系统”。传感器是传感系统的一个组成部分,它是被测量信号输入的第一道关口。 传感器把某种形式的能量转换成另一种形式的能量。有两类:有源的和无源的。有源传感器能将一种能量形式直接转变成另一种,不需要外接的能源或激励源。 无源传感器不能直接转换能量形式,但它能控制从另一输入端输入的能量或激励能,传感器承担将某个对象或过程的特定特性转换成数量的工作。其“对象”可以是固体、液体或气体,而它们的状态可以是静态的,也可以是动态(即过程)的。对象特性被转换量化后可以通过多种方式检测。对象的特性可以是物理性质的,也可以是化学性质的。按照其工作原理,它将对象特性或状态参数转换成可测定的电学量,然后将此电信号分离出来,送入传感器系统加以评测或标示。 传感器原理结构在一段特制的弹性轴上粘贴上专用的测扭应片并组成变桥,即为基础扭矩传感器;在轴上固定着:(1)能源环形变压器的次级线圈,(2)信号环形变压器初级线圈,(3)轴上印刷电路板,电路板上包含整流稳定电源、仪表放大电路、V/F变换电路及信号输出电路。在传感器的外壳上固定着: (1)激磁电路,(2)能源环形变压器的初级线圈(输入),(3) 信号环形变压器次级线圈(输出),(4)信号处理电路 工作过程 向传感器提供±15V电源,激磁电路中的晶体振荡器产生400Hz的方波,经过TDA2030功率放大器即产生交流激磁功率电源,通过能源环形变压器T1从静止的初级线圈传递至旋转的次级线圈,得到的交流电源通过轴上的整流滤波电路得到±5V的直流电源,该电源做运算放大器AD822的工作电源;由基准电源AD589与双运放AD822组成的高精度稳压电源产生±4.5V的精密直流电源,该电源既作为电桥电源,又作为放大器及V/F转换器的工作电源。当弹性轴受扭时,应变桥检测得到的mV级的应变信号通过仪表放大器AD620放大成 1.5v±1v的强信号,再通过V/F转换器LM131变换成频率信号,通过信号环形变压器T2 从旋转的初级线圈传递至静止次级线圈,再经过外壳上的信号处理电路滤波、整形即可得到与弹性轴承受的扭矩成正比的频率信号,该信号为TTL电平,既可提供给专用二次仪表或频率计显示也可直接送计算机处理。由于该旋转变压器动--静环之间只有零点几毫米的间隙,加之传感器轴上部分都密封在金属外壳之内,形成有效的屏蔽,因此具有很强的抗干扰能力。 传感器分类倾角传感器 倾角传感器在军事、航天航空、工业自动化、工程机械、铁路机车、消费电子、海洋船舶等领域得到广泛运用。辉格公司为国内用户提供全球最全面、最专业的产品方案和服务。提供超过500种规格的伺服型、电解质型、电容型、电感型、光纤型等原理的倾角传感器。 加速度传感器(线和角加速度)
通信原理报告数字基带信号HDB3码型编码转换实现
通信原理课程设计报告题目:数字基带信号HDB3码型编码转换实现 专业班级: 姓名: 学号:
指导教师: 设计任务要求: 仿真实现数字基带通信系统信源输入24位二进制序列产生HDB3码,通过高斯白噪声信道,接收端滤波、解码的时域图及频谱图。以矩形波为例,要现输入24位二进制序列产生AMI码,HDB3码,接收端滤波、解码上述码型。
摘要 HDB3码全称三阶高密度双极性码(英语:High Density Bipolar of Order 3,简称:HDB3码)是一种适用于基带传输的编
码方式,它是为了克服AMI码的缺点而出现的,具有能量分散,抗破坏性强等特点。HDB3码实行转换一般分为三个步骤,先将消息码转换AMI码然后加“V”,接着加“B”,这几部我们可以使用C语言进行编程实现。为了实现HDB3码的编码与转换,同时加深对通信系统工作原理的了解,我们采用了MATLAB软件进行编码仿真,同时学习掌握MATLAB软件的基础使用。 关键词:AMI码;HDB3码;编码;解码;MATLAB;仿真 目录 1. 设计原理 (4) 1.1 HDB3码的介绍 (4)
1.2 HDB3码的编码转换规则 (5) 1.3 HDB3码的解码转换规则 (5) 1.4 HDB3码的软件程序设计 (6) 2. MATLAB软件仿真结果及其分析 (10) 2.1 MATLAB软件的介绍 (10) 2.2 仿真结果图示 (12) 2.3 仿真结果分析 (15) 3. 设计总结及心得体会 (22) 4. 参考文献 (22) 5. 致 (23)
正文 1.设计原理 1.1 HDB3码的介绍 HDB3码即三阶高密度双极性码(英语:High Density Bipolar of Order 3,简称:HDB3码)是一种适用于基带传输的编码方式,“三阶”通俗讲就是最多3个连0码元,“高密度双极性”就是没有直流分量,不会连续出现+1或-1,它是为了克服AMI码的缺点而出现的,具有能量分散,抗破坏性强等特点。 三阶高密度双极性码用于所有层次的欧洲E-carrier系统,HDB3码将4个连续的"0"位元取代成"000V"或"B00V"。这个做法可以确保连续的相隔单数的一般B记号。 1.2 HDB3的编码转换规则 HDB3码的编码规则主要分为3步: 1 .先将消息代码变换成AMI码,若AMI码中连0的个数小于4,此时的AMI 码就是HDB3码;
基带信号常用码型转换
通信原理大作业 用matlab仿真 1.幅频失真 S(t)=sint+1/3sin3t, S’(t)=sint+sin3t; 相频失真 S(t)=sint+1/3sin3t, S’(t)=sin(t+2pi)+1/3sin(3t+3pi). 程序: x=0:pi/20:3*pi; y1=sin(x)+(sin(3*x))/3; y2=sin(x)+sin(3*x); y3=sin(x+2*pi)+(sin(3*x+3*pi))/3; figure(1) plot(x,y1); hold on plot(x,y2,'r-'); legend('S(t)=sint+1/3sin3t','S(t)=sint+sin3t') figure(2) plot(x,y1); hold on plot(x,y3,'r-'); legend('S(t)=sint+1/3sin3t','S(t)=sin(t+2*pi)+1/3sin(3t+3*pi)')
幅频失真 相频失真
2. 将输入的一串0,1编码 1) 转换成AMI 码 2) 转换成HDB3码 3) 转换成双相码 4) 转换成Miller 码 5) 转换成CMI 码 总流程 开始 输入数组 依次显示五种码形 结束 转换成AMI 码 转换成CMI 码 转换成 HDB3 码 转换成双相码 转换成Miller 码
转化成五种码具体流程 思路:数组xn 中0保持不变;并统计1个数,当为偶数1保持不变;当为奇数1变换为-1 1) 转换成AMI 码 no no no 得到数组xn Xn (i )是否=1 num=num+1 num 是否为偶数 得到数组xn 长度k i=1; num=0 yn(i)=xn(i) yn(i)=xn(i) yn(i)= -xn(i) i 是否=k 得到数组yn i=i+1
FANUC0系统全参数表资料全
FANUC 0系列参数100-9977 FANUC 0系列参数说明其余参数0100以后 ☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆ ☆ 请注意:以下参数在设定时均按十进制数输入!!! ☆ ☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆ 0100 CMRX 0101 CMRZ 0102 CMR3 0103 CMR4 CMRX 、CMRZ 、CMR3、CMR4分别为X 轴、Z 轴、第三轴、第四轴的指令的倍率, 见附表12。 附表12 X 轴、Z 轴、第三轴、第四轴 的指令的倍率 当一任意指令倍率(No.0035 ACMR=1)被用时,有两种设定方式: ①当一个指令倍率是1/2~1/27时; 预设定值= ②当一个指令倍率是2~48时;预设定值=2*(指令倍率) 0108 SPLOW SLOW :主轴速度以恒定速度旋转,或主轴变档速度(当参数No.003 GST=1) 设定码 倍率 1 0.5 2 1 4 2 10 5 20 10
设定值= 设定围0~255r/min 0109 THDCH 在G92螺纹切削循环的倒角宽度的设定。设定围0~127(0.1螺距) 0110 SCTTIM 检查主轴速度到达信号设定的延时时间,这时间的建立是从执行S码开始,主轴速度到达为止的时间,设定围0~255ms。 0111 MBUF1 0112 MBUF2 MBUF1、MBUF2:可最多设定两个其后的程序段不进行缓存处理的M代码。例如:设定了M03时,M03下面的程序段不进缓存区直接处理。 0113 PSORGX 0114 PSORGZ PSORGX、PSORGZ:分别为X、Z轴参考点上的栅格数(0~255)。 0117 OFCMP 0118 TLCMP 0119 OFMAX 0120 TLMAX 与简易刀具寿命管理功能相关的参数: OFCMP:偏置号补偿值,设定值为0~32。 TLCMP:刀具选择号补偿值,设定值为0~99。
实验3基带信号的常见码型变换
信息院 14电本 基带信号的常见码型变换实验 一、实验目的 1.熟悉RZ 、BNRZ 、BRZ 、CMI 、曼彻斯特、密勒、PST 码型变换原理及工作过程; 2.观察数字基带信号的码型变换测量点波形。 二、实验仪器 1.时钟与基带数据发生模块,位号:G 2.20M 双踪示波器1台 三、实验工作原理 在实际的基带传输系统中,传输码的结构应具有下列主要特性: 1) 相应的基带信号无直流分量,且低频分量少; 2) 便于从信号中提取定时信息; 3) 信号中高频分量尽量少,以节省传输频带并减少码间串扰; 4) 不受信息源统计特性的影响,即能适应于信息源的变化; 5) 编译码设备要尽可能简单 1.1 单极性不归零码(NRZ 码) 单极性不归零码中,二进制代码“1”用幅度为E 的正电平表示,“0”用零电平表示,单极性码中含有直流成分,而且不能直接提取同步信号。 0000 E +1111 图16-1 单极性不归零码 1.2 双极性不归零码(BNRZ 码) 二进制代码“1”、“0”分别用幅度相等的正负电平表示,当二进制代码“1”和“0”等概出现时无直流分量。 10111000E +E -0 图 16-2 双极性不归零码 1.3 单极性归零码(RZ 码) 单极性归零码与单极性不归零码的区别是码元宽度小于码元间隔,每个码元脉冲在下一个码元到来之前回到零电平。单极性码可以直接提取定时信息,仍然含有直流成分。
0000 1111E +0 图 16-3 单极性归零码 1.4 双极性归零码(BRZ 码) 它是双极性码的归零形式,每个码元脉冲在下一个码元到来之前回到零电平。 0000 1111E +0E - 图 16-4 双极性归零码 1.5 曼彻斯特码 曼彻斯特码又称为数字双相码,它用一个周期的正负对称方波表示“0”,而用其反相波形表示“1”。编码规则之一是:“0”码用“01”两位码表示,“1”码用“10”两位码表示。 例如: 消息代码: 1 1 0 0 1 0 1 1 0… 曼彻斯特码:10 10 01 01 10 01 10 10 01… 曼彻斯特码只有极性相反的两个电平,因为曼彻斯特码在每个码元中期的中心点都存在电平跳变,所以含有位定时信息,又因为正、负电平各一半,所以无直流分量。 0000 1111E +E -0 图 16-5 曼彻斯特编码 1.6 CMI 码 CMI 码是传号反转码的简称,与曼彻斯特码类似,也是一种双极性二电平码,其编码规则: “1”码交替的用“11“和”“00”两位码表示; “0”码固定的用“01”两位码表示。 例如: 消息代码:1 0 1 0 0 1 1 0… CMI 码: 11 01 00 01 01 11 00 01… 或: 00 01 11 01 01 00 11 01…
数字基带传输常用码型的MATLAB表示
数字基带传输常用码型的MATLA表示 在某些具有低通特性的有线信道中,特别是传输距离较近的情况下,数字基带信号不经调制可以直接传输,这种系统称为数字基带系统。而具有调制解调过程的数字系统称为数字带通传输系统。在第七章中,将列举数字带通传输系统仿真的例子,在本章中,我们重点讨论数字基带常用码型的产生,即数字基带信号的产生。教材中,我们以单极性不归零码和单极性不归零码的实现作为参考。 单极性不归零码MATLA程序如下: function y=snrz(x) % 本函数实现输入二进制码,输出编号的单极性非归零码 % 输入x 为二进制码,输出y 为单极性非归零码 num=200; % 单极性非归零码每一个码元包含的点 t=0:1/num:length(x); for i=1:length(x); if x(i)==1; for j=1:num; y((i-1)*num+j)=1; % 对应的点赋值为1 end else for j=1:num; y((i-1)*num+j)=0; % 对应的点赋值为0 end end end y=[y,x(i)]; % 为了绘制图形,注意要将y 序列加最后一位 plot(t,y); grid on; axis([0 i -0.2 1.2]); title(' 单极性非归零码1 0 0 1 0 1'); % 绘图 在MATLA命令行窗口中键入x的值,并调用函数snrz(x),就可以得到对应的单极性不归零码。如输入以下指令,将出现图 1 所示的结果。
单极性不归零码MATLA 程序如下: fun ctio n y=srz(x) %本函数实现输入二进制码,输出编号的单极性归零码 %输入x 为二进制码,输出y 为单极性归零码 plot(t,y); grid on; axis([0 i -0.2 1.2]); title(' 单极性非归零码 1 0 0 1 0 1'); num=200; %单极性非归零码每 t=0:1/num:le ngth(x); for i=1:le ngth(x); if x(i)==1; for j=1: nu m/2; y((i*2-2)* num/2+j)=1; % y((i*2-1)*num/2+j)=0; % end else for j=1: num; y((i-1)*num+j)=0; % end end end y=[y,x(i)]; % 个码元包含的点 对1而言,前半部分时间值为1 对1而言,后半部分时间值为0 对应的点赋值为0 为了绘制图形,注意要将 y 序列加最后一位 单极性非归零码1 0 0 1 0 1 图1单极性不归零码
贴片电阻、贴片电容规格、封装、尺寸
贴片电阻、贴片电容规格、封装、尺寸 贴片电阻常见封装有9种,用两种尺寸代码来表示。一种尺寸代码是由4位数字表示的EIA(美国电子工业协会)代码,前两位与后两位分别表示电阻的长与宽,以英寸为单位。我们常说的0603封装就是指英制代码。另一种是米制代码,也由4位数字表示,其单位为毫米。下表列出贴片电阻封装英制和公制的关系及详细的尺寸: 0402=1.0x0.5 0603=1.6x0.8 0805=2.0x1.2 1206=3.2x1.6 1210=3.2x2.5 1812=4.5x3.2 2225=5.6x6.5 国内贴片电阻的命名方法:
1、5%精度的命名:RS-05K102JT 2、1%精度的命名:RS-05K1002FT R -表示电阻 S -表示功率0402是1/16W、0603是1/10W、0805是1/8W、1206是1/4W、 1210是1/3W、1812是1/2W、2010是3/4W、2512是1W。 05 -表示尺寸(英寸):02表示0402、03表示0603、05表示0805、06表示1206、1210表示1210、1812表示1812、10表示1210、12表示2512。 K -表示温度系数为100PPM, 102-5%精度阻值表示法:前两位表示有效数字,第三位表示有多少个零,基本单位是Ω,102=10000Ω=1KΩ。1002是1%阻值表示法:前三位表示有效数字,第四位表示有多少个零,基本单位是Ω,1002=100000Ω=10KΩ。 J -表示精度为5%、F-表示精度为1%。 T -表示编带包装 贴片电阻各参数说明 贴片电阻的阻值表示与贴片电容容值表示 1、贴片电阻的阻值表示与贴片电容容值表示都是数字与“R”组合表示的。譬如:3ohm用3R0表示,10ohm用100表示,100ohm用101表示,也就是说“R”表示点“.”的意思,而101后面个位数的“1”表示的是带有1个0,例如102表示10000。 2、电阻上的数字和字母表示的就是阻值,R002就表示0.002ohm,180表示的就是18ohm. 3、怎样区分贴片的电阻与电容,由于电阻上面有白色的字体表示,所以除端角外背景颜色应该是黑色的,而电容上就没有字体表示,也不会有黑色的颜色,因为有黑色的话容易让人产生误会电容被氧化。 读出四块数据,乘给出数据,相加 贴片电阻的命名 贴片电阻阻值误差精度有±1%、±2%、±5%、±10%精度,常用的最多的是±1%和±5%,±5%精度的常规是用三位数来表示例例512,前面两位是有效数字,第三位数2表示有多少个零,基本单位是Ω,这样就是5100欧,1000Ω=1KΩ,1000000Ω=1MΩ 为了区分±5%,±1%的电阻,于是±1%的电阻常规多数用4位数来表示, 这样前三位是表示有效数字,第四位表示有多少个零4531也就是4530Ω,也就等于4.53KΩ
数字基带信号传输码型发生器设计
武汉理工大学《FPGA原理与应用》课程设计 课程设计任务书 学生姓名:蒋立豪专业班级:通信1303 指导教师:陈适工作单位:信息工程学院 题目: 数字基带信号传输码型发生器设计 初始条件: FPGA芯片(型号不限),ISE仿真软件。 要求完成的主要任务: (包括课程设计工作量及技术要求,以及说明书撰写 等具体要求) 要求每位选课同学提交一篇关于FPGA的应用设计报告,选择的FPGA芯片不限,选用的仿真工具不限。格式要求按照课程设计报告的标准格式完成,包括:常见的几种基带码: 1.单极性非归零码 2.双极性非归零码 3.单极性归零码 4.双极性归零码 5.差分码 6.交替极性码 7.分相码 8.编码信号反转码 指导教师签名:年月日 系主任(或责任教师)签名:年月日 武汉理工大学《FPGA原理与应用》课程设计
武汉理工大学《FPGA原理与应用》课程设计 摘要 数字通信是信息经编码变换处理后,以数字信号在信道上传输的,较之于模拟通信有很大的优点。数字通信有基带传输和频带传输两种方式,而基带传输系统在数字通信中有重要的代表性。在实际的基带传输系统中,并不是所有类型的基带电波形都能在信道中传输,因此,基带传输的传输码型变换是传输过程的重要环节,因此对于传输码型的设计有一定的要求。了解常用码型及存在的误码原因,对传输码型进行初步的研究。本文主要设计一个基于FPGA 的数字基带信号发生器,首先简要介绍了单极性非归零码、双极性非归零码、单极性归零码、双极性归零码、差分码、交替极性码、分相码、传号反转码等基带码的基本特点,然后根据码型转换原理设计发生器模块。由于EDA 技术可以简化电路,集成多块芯片,减小电路体积,所以程序采用VHDL 进行描述,并用ISE 软件仿真实现所有功能,最后将功能集成到FPGA 上,并设计电路,产生的基带码稳定、可靠,可满足不同数字基带系统传输需要。 关键词:数字通信,基带传输,EDA,VHDL,FPGA I 武汉理工大学《FPGA原理与应用》课程设计 Abstract Digital communication is information after processing, transform coding, to digital signal transmission in the channel. Compared with analog communication has great advantages. Digital communication baseband transmission and the transmission frequency band in two ways, and baseband transmission system in digital communication have an important representative. In the actual baseband transmission system, and not all types of baseband wave form can transmit in the channel, therefore, baseband transmission of the transmission code transformation is an