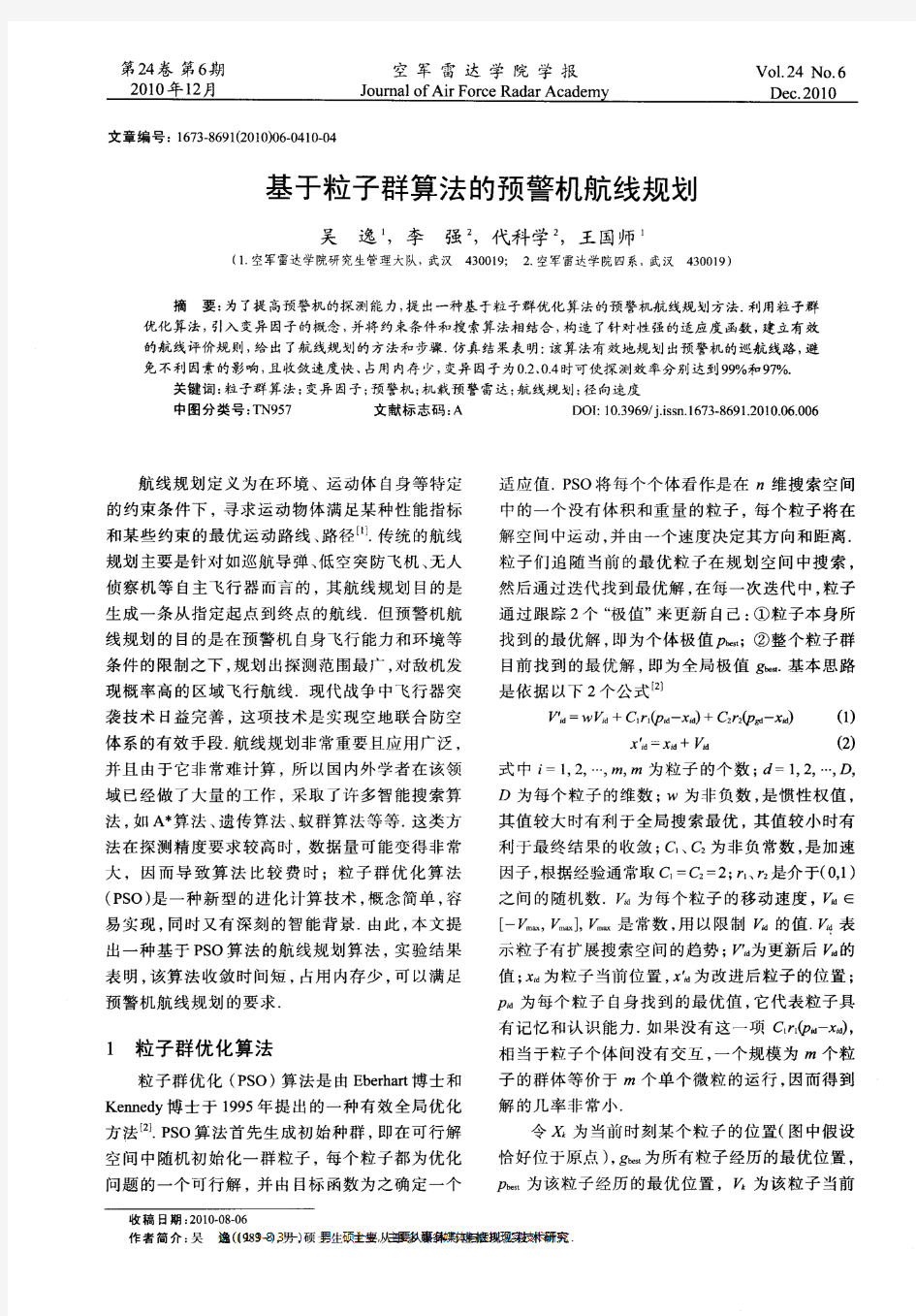
基于粒子群算法的预警机航线规划
(完整word版)基本粒子群算法的原理和matlab程序
基本粒子群算法的原理和matlab程序 作者——niewei120(nuaa) 一、粒子群算法的基本原理 粒子群优化算法源自对鸟群捕食行为的研究,最初由Kennedy和Eberhart提出,是一种通用的启发式搜索技术。一群鸟在区域中随机搜索食物,所有鸟知道自己当前位置离食物多远,那么搜索的最简单有效的策略就是搜寻目前离食物最近的鸟的周围区域。PSO 算法利用这种模型得到启示并应用于解决优化问题。PSO 算法中,每个优化问题的解都是粒子在搜索 空间中的位置,所有的粒子都有一个被优化的目标函数所决定的适应值,粒子还有一个速度值决定它们飞翔的方向和距离,然后粒子群就追随当前的最优粒子在解空间中搜索。 PSO 算法首先在给定的解空间中随机初始化粒子群,待优化问题的变量数决定了解空间的维数。每个粒子有了初始位置与初始速度。然后通过迭代寻优。在每一次迭代中,每个粒子通过跟踪两个“极值”来更新自己在解空间中的空间位置与飞翔速度。第一个极值就是单个粒子本身在迭代过程中找到的最优解粒子,这个粒子叫做个体极值。另一个极值是种群所有粒子在迭代过程中所找到的最优解粒子,这个粒子是全局极值。上述的方法叫全局粒子群算法。如果不用种群所有粒子而只用其中一部分作为该粒子的邻居粒子,那么在所有邻居粒子中的极值就是局部极值,该方法称为局部PSO 算法。 速度、位置的更新方程表示为: 每个粒子自身搜索到的历史最优值p i ,p i=(p i1,p i2,....,p iQ),i=1,2,3,....,n。所有粒子搜索到的最优值p g,p g=(p g1,p g2,....,p gQ),注意这里的p g只有一个。 是保持原来速度的系数,所以叫做惯性权重。 是粒子跟踪自己历史最优值的权重系数,它表示粒子自身的认识,所以叫“认知”。通常设置为2。 是粒子跟踪群体最优值的权重系数,它表示粒子对整个群体知识的认识,所以叫做“社会知识”,经常叫做“社会”。通常设置为2。 是[0,1]区间内均匀分布的随机数。 是对位置更新的时候,在速度前面加的一个系数,这个系数我们叫做约束因子。通常设 置为1 。
粒子群算法综述
粒子群算法综述 【摘要】:粒子群算法(pso)是一种新兴的基于群体智能的启发式全局搜索算法,具有易理解、易实现、全局搜索能力强等特点,倍受科学与工程领域的广泛关注,已得到广泛研究和应用。为了进一步推广应用粒子群算法并为深入研究该算法提供相关资料,本文对目前国内外研究现状进行了全面分析,在论述粒子群算法基本思想的基础上,围绕pso的运算过程、特点、改进方式与应用等方面进行了全面综述,并给出了未来的研究方向展望。 【关键词】:粒子群算法优化综述 优化理论的研究一直是一个非常活跃的研究领域。它所研究的问题是在多方案中寻求最优方案。人们关于优化问题的研究工作,随着历史的发展不断深入,对人类的发展起到了重要的推动作用。但是,任何科学的进步都受到历史条件的限制,直到二十世纪中期,由于高速数字计算机日益广泛应用,使优化技术不仅成为迫切需要,而且有了求解的有力工具。因此,优化理论和算法迅速发展起来,形成一门新的学科。至今已出现线性规划、整数规划、非线性规划、几何规划、动态规划、随机规划、网络流等许多分支。这些优化技术在诸多工程领域得到了迅速推广和应用,如系统控制、人工智能、生产调度等。随着人类生存空间的扩大,以及认识世界和改造世界范围的拓宽,常规优化法如牛顿法、车辆梯度法、模式搜索法、单纯形法等已经无法处理人们所面的复杂问题,因此高效的
优化算法成为科学工作者的研究目标之一。 1.粒子群算法的背景 粒子群算法(particle swarm optimization,pso)是一种新兴的演化算法。该算法是由j.kennedy和r.c.eberhart于1995年提出的一种基于群智能的随机优化算法。这类算法的仿生基点是:群集动物(如蚂蚁、鸟、鱼等)通过群聚而有效的觅食和逃避追捕。在这类群体的动物中,每个个体的行为是建立在群体行为的基础之上的,即在整个群体中信息是共享的,而且在个体之间存在着信息的交换与协作。如在蚁群中,当每个个体发现食物之后,它将通过接触或化学信号来招募同伴,使整个群落找到食源;在鸟群的飞行中,每只鸟在初始状态下处于随机位置,且朝各个方向随机飞行,但随着时间推移,这些初始处于随机状态的鸟通过相互学习(相互跟踪)组织的聚集成一个个小的群落,并以相同的速度朝着相同的方向飞行,最终整个群落聚集在同一位置──食源。这些群集动物所表现的智能常称为“群体智能”,它可表述为:一组相互之间可以进行直接通讯或间接通讯(通过改变局部环境)的主体,能够通过合作对问题进行分布求解。换言之,一组无智能的主体通过合作表现出智能行为特征。粒子群算法就是以模拟鸟的群集智能为特征,以求解连续变量优化问题为背景的一种优化算法。因其概念简单、参数较少、易于实现等特点,自提出以来已经受到国内外研究者的高度重视并被广泛应用于许多领域。
多机器人路径规划研究方法
多机器人路径规划研究方法 张亚鸣雷小宇杨胜跃樊晓平瞿志华贾占朝 摘要:在查阅大量文献的基础上对多机器人路径规划的主要研究内容和研究现状进行了分析和总结,讨论了多机器人路径规划方法的评判标准,并阐述了研究遇到的瓶颈问题,展望了多机器人路径规划方法的发展趋势。 关键词:多机器人;路径规划;强化学习;评判准则 Abstract:This paper analyzed and concluded the main method and current research of the path planning research for multi robot.Then discussed the criterion of path planning research for multi robot based large of literature.Meanwhile,it expounded the bottleneck of the path planning research for multi robot,forecasted the future development of multi robot path planning. Key words:multi robot;path planning;reinforcement learning;evaluating criteria 近年来,分布式人工智能(DAI)成为人工智能研究的一个重要分支。DAI研究大致可以分为DPS(distributed problem solving)和MAS(multi agent system)两个方面。一些从事机器人学的研究人员受多智能体系统研究的启发,将智能体概念应用于多机器人系统的研究中,将单个机器人视做一个能独立执行特定任务的智能体,并把这种多机器人系统称为多智能体机器人系统(MARS)。因此,本文中多机器人系统等同于多智能体机器人系统。目前,多机器人系统已经成为学术界研究的热点,而路径规划研究又是其核心部分。 机器人路径规划问题可以建模为一个带约束的优化问题,其包括地理环境信息建模、路径规划、定位和避障等任务,它是移动机器人导航与控制的基础。单个移动机器人路径规划研究一直是机器人研究的重点,且已经有许多成果[1~3],例如在静态环境中常见的有连接图法、可视图法、切线图法、Voronoi图法、自由空间法、栅格法、拓扑法、链接图法、Dempster Shafer 证据理论建图等;动态环境中常见的有粒子群算法、免疫算法、遗传算法、神经网络、蚁群算法、模拟退火算法、人工势场法等。然而,多机器人路径规划
基本粒子群算法的matlab源程序
主函数源程序(main.m) %------基本粒子群优化算法(Particle Swarm Optimization)-----------%------名称:基本粒子群优化算法(PSO) %------作用:求解优化问题 %------说明:全局性,并行性,高效的群体智能算法 %------初始格式化--------------------------------------------------clear all; clc; format long; %------给定初始化条件---------------------------------------------- c1=1.4962;%学习因子1 c2=1.4962;%学习因子2 w=0.7298;%惯性权重 MaxDT=1000;%最大迭代次数 D=10;%搜索空间维数(未知数个数) N=40;%初始化群体个体数目 eps=10^(-6);%设置精度(在已知最小值时候用) %------初始化种群的个体(可以在这里限定位置和速度的范围)------------for i=1:N for j=1:D x(i,j)=randn;%随机初始化位置 v(i,j)=randn;%随机初始化速度 end end %------先计算各个粒子的适应度,并初始化Pi和Pg----------------------for i=1:N p(i)=fitness(x(i,:),D); y(i,:)=x(i,:); end pg=x(1,:);%Pg为全局最优 for i=2:N if fitness(x(i,:),D)
粒子群优化算法及其应用研究
摘要 在智能领域,大部分问题都可以归结为优化问题。常用的经典优化算法都对问题有一定的约束条件,如要求优化函数可微等,仿生算法是一种模拟生物智能行为的优化算法,由于其几乎不存在对问题的约束,因此,粒子群优化算法在各种优化问题中得到广泛应用。 本文首先描述了基本粒子群优化算法及其改进算法的基本原理,对比分析粒子群优化算法与其他优化算法的优缺点,并对基本粒子群优化算法参数进行了简要分析。根据分析结果,研究了一种基于量子的粒子群优化算法。在标准测试函数的优化上粒子群优化算法与改进算法进行了比较,实验结果表明改进的算法在优化性能明显要优于其它算法。本文算法应用于支持向量机参数选择的优化问题上也获得了较好的性能。最后,对本文进行了简单的总结和展望。 关键词:粒子群优化算法最小二乘支持向量机参数优化适应度
目录 摘要...................................................................... I 目录....................................................................... II 1.概述. (1) 1.1引言 (1) 1.2研究背景 (1) 1.2.1人工生命计算 (1) 1.2.2 群集智能理论 (2) 1.3算法比较 (2) 1.3.1粒子群算法与遗传算法(GA)比较 (2) 1.3.2粒子群算法与蚁群算法(ACO)比较 (3) 1.4粒子群优化算法的研究现状 (4) 1.4.1理论研究现状 (4) 1.4.2应用研究现状 (5) 1.5粒子群优化算法的应用 (5) 1.5.1神经网络训练 (6) 1.5.2函数优化 (6) 1.5.3其他应用 (6) 1.5.4粒子群优化算法的工程应用概述 (6) 2.粒子群优化算法 (8) 2.1基本粒子群优化算法 (8) 2.1.1基本理论 (8) 2.1.2算法流程 (9) 2.2标准粒子群优化算法 (10) 2.2.1惯性权重 (10) 2.2.2压缩因子 (11) 2.3算法分析 (12) 2.3.1参数分析 (12) 2.3.2粒子群优化算法的特点 (14) 3.粒子群优化算法的改进 (15) 3.1粒子群优化算法存在的问题 (15) 3.2粒子群优化算法的改进分析 (15) 3.3基于量子粒子群优化(QPSO)算法 (17) 3.3.1 QPSO算法的优点 (17) 3.3.2 基于MATLAB的仿真 (18) 3.4 PSO仿真 (19) 3.4.1 标准测试函数 (19) 3.4.2 试验参数设置 (20) 3.5试验结果与分析 (21) 4.粒子群优化算法在支持向量机的参数优化中的应用 (22) 4.1支持向量机 (22) 4.2最小二乘支持向量机原理 (22)
用粒子群算法求解多目标优化问题的Pareto解
粒子群算法程序 tic D=10;%粒子群中粒子的个数 %w=0.729;%w为惯性因子 wmin=1.2; wmax=1.4; c1=1.49445;%正常数,成为加速因子 c2=1.49445;%正常数,成为加速因子 Loop_max=50;%最大迭代次数 %初始化粒子群 for i=1:D X(i)=rand(1)*(-5-7)+7; V(i)=1; f1(i)=X(i)^2; f2(i)=(X(i)-2)^2; end Loop=1;%迭代计数器 while Loop<=Loop_max%循环终止条件 %对粒子群中的每个粒子进行评价 for i=1:D k1=find(1==Xv(i,:));%找出第一辆车配送的城市编号 nb1=size(k1,2);%计算第一辆车配送城市的个数 if nb1>0%判断第一辆车配送城市个数是否大于0,如果大于0则 a1=[Xr(i,k1(:))];%找出第一辆车配送城市顺序号 b1=sort(a1);%对找出第一辆车的顺序号进行排序 G1(i)=0;%初始化第一辆车的配送量 k51=[]; am=[]; for j1=1:nb1 am=find(b1(j1)==Xr(i,:)); k51(j1)=intersect(k1,am);%计算第一辆车配送城市的顺序号 G1(i)=G1(i)+g(k51(j1)+1);%计算第一辆车的配送量 end k61=[]; k61=[0,k51,0];%定义第一辆车的配送路径 L1(i)=0;%初始化第一辆车的配送路径长度 for k11=1:nb1+1 L1(i)=L1(i)+Distance(k61(k11)+1,k61(k11+1)+1);%计算第一辆车的配送路径长度end else%如果第一辆车配送的城市个数不大于0则 G1(i)=0;%第一辆车的配送量设为0 L1(i)=0;%第一辆车的配送路径长度设为0 end
(完整word版)基本粒子群算法的原理和matlab程序.doc
基本粒子群算法的原理和matlab 程序 作者—— niewei120 (nuaa) 一、粒子群算法的基本原理 粒子群优化算法源自对鸟群捕食行为的研究,最初由Kennedy 和 Eberhart 提出,是一种通 用的启发式搜索技术。一群鸟在区域中随机搜索食物,所有鸟知道自己当前位置离食物多远, 那么搜索的最简单有效的策略就是搜寻目前离食物最近的鸟的周围区域。PSO 算法利用这种模型得到启示并应用于解决优化问题。PSO 算法中,每个优化问题的解都是粒子在搜索 空间中的位置,所有的粒子都有一个被优化的目标函数所决定的适应值,粒子还有一个速度值决定它们飞翔的方向和距离,然后粒子群就追随当前的最优粒子在解空间中搜索。 PSO 算法首先在给定的解空间中随机初始化粒子群,待优化问题的变量数决定了解空间的维数。每个粒子有了初始位置与初始速度。然后通过迭代寻优。在每一次迭代中,每个粒子通过跟踪两个“极值”来更新自己在解空间中的空间位置与飞翔速度。第一个极值就是单个粒子本身在迭代过程中找到的最优解粒子,这个粒子叫做个体极值。另一个极值是种群所有粒子在迭代过程中所找到的最优解粒子,这个粒子是全局极值。上述的方法叫全局粒子群算法。如果不用种群所有粒子而只用其中一部分作为该粒子的邻居粒子,那么在所有邻居粒子中的极值就是局部极值,该方法称为局部PSO 算法。 速度、位置的更新方程表示为: 每个粒子自身搜索到的历史最优值p i,p i=(p i1 ,p i2 ,....,p iQ ), i=1,2,3,....,n 。所有粒子搜索到的最优值p g, p g=(p g1 ,p g2,....,p gQ ),注意这里的p g只有一个。 是保持原来速度的系数,所以叫做惯性权重。 是粒子跟踪自己历史最优值的权重系数,它表示粒子自身的认识,所以叫“认知”。通常设置为 2 。 是粒子跟踪群体最优值的权重系数,它表示粒子对整个群体知识的认识,所以叫做“社会知识”,经常叫做“社会”。通常设置为2。 是[0,1] 区间内均匀分布的随机数。 是对位置更新的时候,在速度前面加的一个系数,这个系数我们叫做约束因子。通常设 置为 1 。
粒子群优化算法介绍及matlab程序
粒子群优化算法(1)—粒子群优化算法简介 PSO算法就是模拟一群鸟寻找食物的过程,每个鸟就是PSO中的粒子,也就是我们需要求解问题的可能解,这些鸟在寻找食物的过程中,不停改变自己在空中飞行的位置与速度。大家也可以观察一下,鸟群在寻找食物的过程中,开始鸟群比较分散,逐渐这些鸟就会聚成一群,这个群忽高忽低、忽左忽右,直到最后找到食物。这个过程我们转化为一个数学问题。寻找函数y=1-cos(3*x)*exp(-x)的在[0,4]最大值。该函数的图形如下: 当x=0.9350-0.9450,达到最大值y=1.3706。为了得到该函数的最大值,我们在[0, 4]之间随机的洒一些点,为了演示,我们放置两个点,并且计算这两个点的函数值,同时给这两个点设置在[0, 4]之间的一个速度。下面这些点就会按照一定的公式更改自己的位置,到达新位置后,再计算这两个点的值,然后再按照一定的公式更新自己的位置。直到最后在y=1.3706这个点停止自己的更新。这个过程与粒子群算法作为对照如下: 这两个点就是粒子群算法中的粒子。 该函数的最大值就是鸟群中的食物。 计算两个点函数值就是粒子群算法中的适应值,计算用的函数就是粒子群算法中的适应度函数。 更新自己位置的公式就是粒子群算法中的位置速度更新公式。 下面演示一下这个算法运行一次的大概过程: 第一次初始化 第一次更新位置
第二次更新位置 第21次更新 最后的结果(30次迭代) 最后所有的点都集中在最大值的地方。
粒子群优化算法(2)—标准粒子群优化算法 在上一节的叙述中,唯一没有给大家介绍的就是函数的这些随机的点(粒子)是如何运动的,只是说按照一定的公式更新。这个公式就是粒子群算法中的位置速度更新公式。下面就介绍这个公式是什么。在上一节中我们求取函数y=1-cos(3*x)*exp(-x)的在[0, 4]最大值。并在[0,4]之间放置了两个随机的点,这些点的坐标假设为x1=1.5,x2=2.5;这里的点是一个标量,但是我们经常遇到的问题可能是更一般的情况—x 为一个矢量的情况,比如二维z=2*x1+3*x22的情况。这个时候我们的每个粒子均为二维,记粒子P1=(x11,x12),P2=(x21,x22),P3=(x31,x32),......Pn=(xn1,xn2)。这里n 为粒子群群体的规模,也就是这个群中粒子的个数,每个粒子的维数为2。更一般的是粒子的维数为q ,这样在这个种群中有n 个粒子,每个粒子为q 维。 由n 个粒子组成的群体对Q 维(就是每个粒子的维数)空间进行搜索。每个粒子表示为:x i =(x i1,x i2,x i3,...,x iQ ),每个粒子对应的速度可以表示为v i =(v i1,v i2,v i3,....,v iQ ),每个粒子在搜索时要考虑两个因素: 1. 自己搜索到的历史最优值 p i ,p i =(p i1,p i2,....,p iQ ),i=1,2,3,....,n ; 2. 全部粒子搜索到的最优值p g ,p g =(p g1,p g2,....,p gQ ),注意这里的p g 只有一个。 下面给出粒子群算法的位置速度更新公式: 112()()()()k k k k i i i i v v c rand pbest x c rand gbest x ω+=+??-+??-, 11k k k i i i x x av ++=+. 这里有几个重要的参数需要大家记忆,因为在以后的讲解中将会经常用到,它们是: ω是保持原来速度的系数,所以叫做惯性权重。1c 是粒子跟踪自己历史最优值的权重系数,它表示粒子自身的认识,所以叫“认知”。通常设置为2。2c 是粒子跟踪群体最优值的权重系数,它表示粒子对整个群体知识的认识,所以叫做“社会知识”,经常叫做“社会”。通常设置为2。()rand 是[0,1]区间内均匀分布的随机数。a 是对位置更新的时候,在速度前面加的一个系数,这个系数我们叫做约束因子。通常设置为1。这样一个标准的粒子群算法就介绍结束了。下图是对整个基本的粒子群的过程给一个简单的图形表示。 判断终止条件可是设置适应值到达一定的数值或者循环一定的次数。 注意:这里的粒子是同时跟踪自己的历史最优值与全局(群体)最优值来改变自己的位置预速度的,所以又叫做全局版本的标准粒子群优化算法。
粒子群算法基本原理
4.1粒子群算法基本原理 粒子群优化算法[45]最原始的工作可以追溯到1987年Reynolds 对鸟群社会系统Boids (Reynolds 对其仿真鸟群系统的命名)的仿真研究 。通常,群体的行为可以由几条简单的规则进行建模,虽然每个个体具有简单的行为规则,但是却群体的行为却是非常的复杂,所以他们在鸟类仿真中,即Boids 系统中采取了下面的三条简单的规则: (1)飞离最近的个体(鸟),避免与其发生碰撞冲突; (2)尽量使自己与周围的鸟保持速度一致; (3)尽量试图向自己认为的群体中心靠近。 虽然只有三条规则,但Boids 系统已经表现出非常逼真的群体聚集行为。但Reynolds 仅仅实现了该仿真,并无实用价值。 1995年Kennedy [46-48]和Eberhart 在Reynolds 等人的研究基础上创造性地提出了粒子群优化算法,应用于连续空间的优化计算中 。Kennedy 和Eberhart 在boids 中加入了一个特定点,定义为食物,每只鸟根据周围鸟的觅食行为来搜寻食物。Kennedy 和Eberhart 的初衷是希望模拟研究鸟群觅食行为,但试验结果却显示这个仿真模型蕴含着很强的优化能力,尤其是在多维空间中的寻优。最初仿真的时候,每只鸟在计算机屏幕上显示为一个点,而“点”在数学领域具有多种意义,于是作者用“粒子(particle )”来称呼每个个体,这样就产生了基本的粒子群优化算法[49]。 假设在一个D 维搜索空间中,有m 个粒子组成一粒子群,其中第i 个粒子的空间位置为123(,,,...,)1,2,...,i i i i iD X x x x x i m ==,它是优化问题的一个潜在
可制定的路线规划
可定制的路线规划 第一部分:对《Customizable Route Planningshortestpath》进行总结分析: 过去的十年里,在道路网络上找到最短路径的方法已经有很多了。实际算法主要包括:预处理需要几分钟,然后产生线性的数据用于实时查询。然而现实世界对交通路线的规划提出了更高的要求,需要支持其他的自然量度,例如最短距离,步行,骑行等。 可定制的路线规划能够在支持这种个性化的出行方式,类似于我们日常生活中的百度地图,高德地图一样,我们可以实时选择最为合适的出行方式。这种系统能够支持流量的更新和动态场景的改变。为了制定这样的系统,需要一种快速查询的算法,这种算法还需有一定的稳健性。 为了实现这种目标,我们区分了道路的两个特征,运用拓扑的方法描述道路的物理特性,比如物理长度,转弯类型,速度限制等;道路的度量指标来表示实际的道路情况,在算法中运用在函数里。这里假设道路的物理特性是很少发生变化的,而实际的指标经常发生变化。 为了实现这种分离,有三个阶段,第一个阶段将独立的指标预处理相对较慢,仅作为拓扑方法的输入指标,第二个阶段,指标的定制必须很快,第三个阶段查询使用的是前两个阶段的输出,并且实时的查询要很快。在点到点的算法属性中,该论文主要阐述了三类方法:CH,SHARC,这类的层次结构度量,PCD,ALT基于目标方向的技术和基于图形分离的技术,在对比后选择了基于图形分离技术。 本文作者的思路是先建立一个基本的算法,然后再考虑几个技术的结合使它更实用。 基本算法:以分离器为基础的算法 其他技术:稀疏化:边缘收缩,并做出了一个轻量级的收缩计划 目标方向化:PCD技术,但是是在定制和查询期间使用 ALT技术,ALT预处理运行Dijkstra算法 多层次的叠加图表 流水线操作:快于基于邻接集的操作,有效取决于度量,使用了MLD伴 随原始2级CALT操作 以上的所有内容都是在考虑道路网络的简化,但是没有考虑到转弯的成本,作者进一步处理了转向问题,最后对路径解压完成了可定制化的路线规划。 第二部分:对于我们项目的启发: 我们需要建立一个合适的数学模型来实时模拟可定制的路径规划问题,对实时的数据进行清洗和处理。路径规划的数学模型在现代的科学技术中已经比较成熟了,我们只需要选取合适的模型来解决问题就行了。在下一阶段中我们将建立基本的算法和采集数据。通过查
c语言实现的粒子群算法代码及解释
//粒子群PSO算法 #include 粒子群算法(1)----粒子群算法简介 二、粒子群算法的具体表述 上面罗嗦了半天,那些都是科研工作者写论文的语气,不过,PSO的历史就像上面说的那样。下面通俗的解释PSO算法。 PSO算法就是模拟一群鸟寻找食物的过程,每个鸟就是PSO.中的粒子,也就是我们需要求解问题的可能解,这些鸟在寻找食物的过程中,不停改变自己在空中飞行的位置与速度。大家也可以观察一下,鸟群在寻找食物的过程中,开始鸟群比较分散,逐渐这些鸟就会聚成一群,这个群忽高忽低、忽左忽右,直到最后找到食物。这个过程我们转化为一个数学问题。寻找函数y=1-cos(3*x)*exp(-x)的在[0,4]最大值。该函数的图形如下: 当x=0.9350-0.9450,达到最大值y=1.3706。为了得到该函数的最大值,我们在[0,4]之间随机的洒一些点,为了演示,我们放置两个点,并且计算这两个点的函数值,同时给这两个点设置在[0,4]之间的一个速度。下面这些点就会按照一定的公式更改自己的位置,到达新位置后,再计算这两个点的值,然后再按照一定的公式更新自己的位置。直到最后在y=1.3706这个点停止自己的更新。这个过程与粒子群算法作为对照如下: 这两个点就是粒子群算法中的粒子。 该函数的最大值就是鸟群中的食物 计算两个点函数值就是粒子群算法中的适应值,计算用的函数就是粒子群算法中的适应度函数。 更新自己位置的一定公式就是粒子群算法中的位置速度更新公式。 下面演示一下这个算法运行一次的大概过程: 第一次初始化 第一次更新位置 第二次更新位置 第21次更新 最后的结果(30次迭代) 最后所有的点都集中在最大值的地方。 程序1 当22111==c c ,5.12212==c c ,2.1=w 。 a)%主函数源程序(main.m ) %------基本粒子群算法 (particle swarm optimization ) %------名称: 基本粒子群算法 %------初始格式化 clear all ; %清除所有变量 clc; %清屏 format long ; %将数据显示为长整形科学计数 %------给定初始条条件------------------ N=40; %3初始化群体个数 D=10; %初始化群体维数 T=100; %初始化群体最迭代次数 c11=2; %学习因子1 c21=2; %学习因子2 c12=1.5; c22=1.5; w=1.2; %惯性权重 eps=10^(-6); %设置精度(在已知最小值的时候用) %------初始化种群个体(限定位置和速度)------------ x=zeros(N,D); v=zeros(N,D); for i=1:N for j=1:D x(i,j)=randn; %随机初始化位置 v(i,j)=randn; %随机初始化速度 end end %------显示群位置---------------------- figure(1) for j=1:D if (rem(D,2)>0) subplot((D+1)/2,2,j) else subplot(D/2,2,j) end plot(x(:,j),'b*');grid on xlabel('粒子') ylabel('初始位置') tInfo=strcat('第',char(j+48),'维'); if(j>9) tInfo=strcat('第',char(floor(j/10)+48),char(rem(j,10)+48),'维'); end title(tInfo) end %------显示种群速度 figure(2) for j=1:D if(rem(D,2)>0) subplot((D+1)/2,2,j) else subplot(D/2,2,j) end plot(x(:,j),'b*');grid on xlabel('粒子') ylabel('初始速度') tInfo=strcat('第,char(j+48),'维'); if(j>9) tInfo=strcat('第',char(floor(j/10)+48), char(rem(j,10)+48),'维); end title(tInfo) end figure(3) %第一个图 subplot(1,2,1) 粒子群算法介绍 优化问题是工业设计中经常遇到的问题,许多问题最后都可以归结为优化问题. 为了解决各种各样的优化问题,人们提出了许多优化算法,比较著名的有爬山法、遗传算法等.优化问题有两个主要问题:一是要求寻找全局最小点,二是要求有较高的收敛速度. 爬山法精度较高,但是易于陷入局部极小. 遗传算法属于进化算法( Evolutionary Algorithms) 的一种,它通过模仿自然界的选择与遗传的机理来寻找最优解. 遗传算法有三个基本算子:选择、交叉和变异. 但是遗传算法的编程实现比较复杂,首先需要对问题进行编码,找到最优解之后还需要对问题进行解码,另外三个算子的实现也有许多参数,如交叉率和变异率,并且这些参数的选择严重 影响解的品质,而目前这些参数的选择大部分是依靠经验.1995 年Eberhart博士和kennedy博士提出了一种新的算法;粒子群优化(Particle Swarm Optimization -PSO) 算法. 这种算法以 其实现容易、精度高、收敛快等优点引起了学术界的重视,并且在解决实际问题中展示了其优越性。 粒子群优化(Particle Swarm Optimization - PSO) 算法是近年来发展起来的一种新的进化算法( Evolutionary Algorithm - EA) .PSO 算法属于进化算法的一种,和遗传算法相似,它也是从随机解出发,通过迭代寻找最优解,它也是通过适应度来评价解的品质. 但是它比遗传算法规则更为简单,它没有遗传算法的“交叉”(Crossover) 和“变异”(Mutation) 操作. 它通过追随 当前搜索到的最优值来寻找全局最优。 1. 引言 粒子群优化算法(PSO)是一种进化计算技术(evolutionary computation),由Eberhart博士和kennedy博士提出。源于对鸟群捕食的行为研究。 PSO同遗传算法类似,是一种基于迭代的优化算法。系统初始化为一组随机解,通过迭代搜寻最优值。但是它没有遗传算法用的交叉(crossover)以及变异(mutation),而是粒子在解空间追随最优的粒子进行搜索。同遗传算法比较,PSO的优势在于简单容易实现并且没有许多参数需要调整。目前已广泛应用于函数优化,神经网络训练,模糊系统控制以及其他遗传算法的应用领域 2. 背景: 人工生命 "人工生命"是来研究具有某些生命基本特征的人工系统。人工生命包括两方面的内容: 1. 研究如何利用计算技术研究生物现象 2. 研究如何利用生物技术研究计算问题 我们现在关注的是第二部分的内容. 现在已经有很多源于生物现象的计算技巧. 例如, 人工神经网络是简化的大脑模型. 遗传算法是模拟基因进化过程的. 现在我们讨论另一种生物系统- 社会系统. 更确切的是, 在由简单个体组成的群落与环境以及个体之间的互动行为. 也可称做"群智能"(swarm intelligence). 这些模拟系统利用局 部信息从而可能产生不可预测的群体行为 例如floys和boids, 他们都用来模拟鱼群和鸟群的运动规律, 主要用于计算机视觉和计算机辅助设计. 在计算智能(computational intelligence)领域有两种基于群智能的算法. 蚁群算法(ant colony optimization)和粒子群算法(particle swarm optimization). 前者是对蚂蚁群落食物采集过程的模拟. 已经成功运用在很多离散优化问题上. 粒子群优化算法(PSO) 也是起源对简单社会系统的模拟. 最初设想是模拟鸟群觅食的 过程. 但后来发现PSO是一种很好的优化工具. 路径规划的分类: 一、按路径维数 根据医学影像设备的不同,穿刺手术可以分二维和三维影像导航手术。所以根据应用场合的不同,路径规划也可分为二维路径规划和三维路径规划。 二维路径规划主要应用在超声、CT、X 射线等设备的导航手术中,三维路径规划则主要应用在三维超声、MRI 等设备的导航手术中。 二、按路径形式 根据穿刺路径特点,路径规划又可按照路径形式的不同分为: R 型、S 型、H 型和混合型,即整个路径包含两种以上不同路径形式组合。 三、按规划方向 由路径形式可以看出路径是可逆的,即理论上针可以从目标靶点沿原路返回穿刺至入针点。所以根据路径规划方向可分为正向规划和逆向规划。正向规划即从入针点到目标靶点的穿刺规划,逆向规划是利用针路的可逆性,从目标靶点出发穿刺可以选择的入针区域,来优化入针位姿和整个路径。 四、按规划算法 路径规划按算法大体可分为数值法、搜索法和反解法三大类。 五、算法概述 (一)数值法是通过数值计算的方法来优化路径,通常是利用目标函数的最大或最小值来得到最优路径的方 法。 1)概率法是考虑路径误差的随机性,利用数学概率原理计算穿刺成功率最大的路径。 2)目标函数法是考虑一些优化的指标(如路径最短,绕开障碍物等),建立目标函数,通过计算目 标函数得到最优解。 (二)搜索法是根据路径形式特点,利用计算机的人工智能搜索算法来搜索可行性路径。 1)路线图法主要思想是将自由空间转换成为一维线段所组成的网络,所要找的路径被局限在这个 网络之中,即将路径规划问题转化成图的搜索问题。 i.可视图法是由麻省理工学院的Tomás Lozano-Pérez和IBM研究院的MichaelA.Wesley 于1979年提出的。其最大特点是将障碍物用多边形包围盒来表达。图1表示某一环境 空间,s、g分别称为起始点和目标点。O1和O2表示两个障碍物。图2是构造出的对 应图1的可视图。利用搜索算法规划出从起始点至目标点的最优路径。 粒子群算法原理及其在函数优化中的应用 1粒子群优化(PSO)算法基本原理 1.1标准粒子群算法 假设在一个D 维的目标搜索空间中,有 m 个代表问题潜在解的粒子组成一 个种群x [X i ,X 2,...,X m ],第i 个粒子的信息可用D 维向量表示为 X i [X ii , X i2,..., X iD ]T ,其速度为V i [V ii ,V i2,...,V iD ]T 。算法首先初始化m 个随机粒 子,然后通过迭代找到最优解。每一次迭代中,粒子通过跟踪2个极值进行信息 交流,一个是第i 个粒子本身找到的最优解,称之为个体极值,即 P i [P il , P i2,...,厢]丁 ;另一个是所有粒子目前找到的最优解,称之为群体极值, 即P g [P gi ,P g2,..., P gD 「。粒子在更新上述2个极值后,根据式(1)和式(2)更新自 己的速度和位置。 t 1 t t t t t\ V i WV i C 1「1(P i X i ) C 2「2(P g X i ) 式中,t 代表当前迭代次数,「1,「2是在[0,1]之间服从均匀分布的随机数,C 1,C 2 称为学习因子,分别调节粒子向个体极值和群体极值方向飞行的步长, w 为惯性 权重,一般在0.1~0.9之间取值。在标准的PSO 算法中,惯性权重w 被设为常数, 通常取w 0.5。在实际应用中,x 需保证在一定的范围内,即x 的每一维的变化 范围均为[X min ,X max ],这在函数优化问题中相当丁自变量的定义域 1.2算法实现步骤 步骤1:表示出PSO 算法中的适应度函数fitness(x);(编程时最好以函数的 形式保存,便丁多次调用。) 步骤2:初始化PSO 算法中各个参数(如粒子个数,惯性权重,学习因子, 最大迭代次数等),在自变量x 定义域内随机初始化x ,代入fitness(x)求得适应 度值,通过比较确定起始个体极值P i 和全局极值P g 。 步骤3:通过循环迭代更新x 、p i 和p g : ① 确定惯性权重w 的取值(当w 不是常数时)。 ② 根据式(1)更新粒子的速度V :1,若速度中的某一维超过了 V max ,则取为 V max - ③ 根据式(2)更新自变量x ,若x 的取值超过其定义域,则在其定义域内重新 初t 1 X i t t 1 X i V i 1 绪论 最优化问题是在满足一定约束条件下,寻找一组参数值,以使某些最优性度量得到满足,即使系统的某些性能指标达到最大或者最小。它广泛存在于农业、国防、工程、交通、金融、化工、能源、通信、材料等许多领域。最优化技术在上述领域的应用已经产生了巨大的经济效益和社会效益。国内外的实践表明,在同样条件下,经过优化技术的处理,对系统效率的提高、能耗的降低、资源的合理利用及经济效益提高均有显著的效果,而且随着处理对象规模的增大,这种效果也更加显著。传统的优化方法根据问题的性质不同,通常将问题划分为线性规划问题、非线性规划问题、整数规划问题和多目标规划问题。相应的有一些成熟的常规算法,如应用于线性规划问题的单纯形法,应用于非线性规划的牛顿法、共轭梯度法等,应用于整数规划的分枝定界法、动态规划法等。 目前,基于严格机理模型的开放式方程建模与优化已成为国际上公认的主流技术方向。许多工程公司和各大科研机构纷纷投入大量的人力物力对系统的建模与优化进行深入细致的研究,希望取得突破性的进展。然而,基于严格机理模型所得到的优化命题往往具有方程数多、变量维数高、非线性强等特点,这使得相关变量的存储、计算及求解都相当困难。在国民经济的各个领域中都存在着相当多的涉及因素多、规模大、难度高和影响广的优化命题,如流程工业系统优化、运输中的最优调度、生产流程的最优排产、资源的最优分配、农作物的合理布局、工程的最优设计以及国土的最优开发等等,所有这些问题的解决也必须有一个强有力的优化工具来进行求解。而前述传统的优化算法面对这样的大型问题已无能为力,无论是在计算速度、收敛性、初值敏感性等方面都远不能满足要求。 人们从生命现象中得到启示,发明了许多智能的优化方法来解决上述复杂优化问题。例如遗传算法(Genetic Algorithm)参考了生物种群通过遗传和自然选择不断进化的功能、人工免疫系统(Artificail Immune Systems)模拟了生物免疫系统的学习和认知功能、蚁群优化(Ant colony Optimization)算法模仿了蚂蚁群体在路径选择和信息传递方面的行为,粒子群优化(Particle swarm optimization)算法模拟了鸟群和鱼群觅食迁徙中个体与群体协调一致的机理,群落选址算法(colony Location Algorithm)模拟了植物群落的形成机制等,这类借鉴模拟了生命系统的行为、功能和特性的科学计算 % 优化函数以m文件的形式放在fitness.m里面,对不同的优化函数只要修改fitness.m 就可 %------基本粒子群优化算法(Particle Swarm Optimization, PSO)----------- %------初始格式化-------------------------------------------------- clear all; clc; format long; %------给定初始化条件---------------------------------------------- c1=1.4962; %学习因子1 c2=1.4962; %学习因子2 w=0.7298; %惯性权重 MaxDT=1000; %最大迭代次数 D=4; %搜索空间维数(未知数个数) N=10; %初始化群体个体数目 eps=10^(-6); %设置精度(在已知最小值时候用) %------初始化种群的个体(可以在这里限定位置和速度的范围)------------ x=0:0.1:1,y=[-.447,1.978,3.11,5.25,5.02,4.66,4.01,4.58,3.45,5.35,9.22] %------先计算各个粒子的适应度,并初始化Pi和Pg---------------------- for i=1:N p(i)=fitness(x(i,:),D); y(i,:)=x(i,:); end pg=x(1,:); %Pg为全局最优 for i=2:N if fitness(x(i,:),D)粒子群算法(1)----粒子群算法简介
6种粒子群算法程序
粒子群算法与遗传算法的比较
轨迹规划分类及算法
粒子群算法原理及在函数优化中的应用(附程序)
梯度粒子群算法及应用
粒子群算法通用matlab程序