监督分类技术在高分辨率卫星影像中的应用
监督分类技术在高分辨率卫星影像中的应用
随着社会对影像数据需求的逐渐增大,要求的提高,遥感影像的分类精度高低变得非常重要。遥感影像的分类方法按照是否有先验类别可以分为监督分类和非监督分类,这两种分类法有着本质的区别但也存在一定的联系。本文从分类原理、分类过程、分类方法等不同角度分析了这两种方法的区别与联系,并展望了遥感影像分类的发展趋势与发展前景。
关键词:影像分类;监督分类;非监督分类
随着卫星遥感技术的发展,通过遥感获得的地理信息越来越多,遥感影像成为地理信息系统非常重要的信息源。对卫星图像分类就是利用计算机给予图像像元的光谱值,按照一定的规则,将像元归并成有限的几种类型、等级或数据集的过程(这一过程也叫做图像分割).或者说,图像分类就是从原始数据中提取各种信息,分类结果可以与地物特征相联系。比如土地覆盖类型图,就是分类的结果,它可以显示出植被、水系等信息。传统的分类数据主要是Spot、TM、MSS之类的卫星影像,地面分辨率较低。
遥感影像的监督分类和非监督分类方法,是影像分类的最基本、最概括的两种方法。传统的监督分类和非监督分类方法虽然各有优势,但是也都存在一定的不足。新方法、新理论、新技术的引入,为遥感影像分类提供了广阔的前景,监督分类与非监督分类的混合使用更是大大的提高了分类的精度。计算机技术对影像分类的促进与发展.计算机技术的引进,解决了影像分类中海量数据的计算与管理问题;计算机技术支持下的GIS用来辅助影像分类,主要通过四种模式进行[12]:GIS数据作为影像分析的训练样本和先验信息;利用GIS技术对研究区域场景和影像分层分析;GIS建立面向对象的影像分类;提取和挖掘GIS中的知识进行专家分析.这些模式促进了GIS与遥感的结合,提高了影像分类精确性和准确性,使得影像分类迈入了新的天地.数学方法的引入和模型研究的进展为影像分类注入了新的活力.不同的数学方法被引用到模型研究上来,为模型研究的发展提供了广阔的天地,相应地,在遥感影像分类中也产生了大量不同形式的分类模型.如径向基函数(RBF)与粗糙理论结合的基于粗糙理论的RBF网络模型应用于遥感分类[5],对于提供分类精度、增加收敛性都有很好的作用;而基于RBF映射理论的神经网络模型更是融合了参数化统计分布模型和非参数化线性感知器映射模型的优点,不仅学习速度快,而且有高度复杂的映射能力[6].又如模糊数学理论应用于影像分类产生模糊聚类,对影像中混合像元的分类有很好的效果;模糊理论与各种模型结合,更使得影像分类方法的不断完善,分类精度不断提高.人工智能技术对影像分类的促进.专家分类系统被用于影像分类中,利用地学知识和专家系统来辅助遥感影像分类[12],大大提高了影像分类和信息提取的精度.人工神经网络由大量神经元相互连接构成网络结构,通过模拟人脑神经系统的结构和功能应用于影像分类,具有一定的智能推理能力.同时,它还引入了动量法和学习自适率调整的策略,并与地学知识集成,很好的解决了专一的BP神经网络法分类的缺点和不足,提高了分类效率和分类精度.监督分类与非监督分类的结合.由于遥感数据的数据量大、类别多以及同物异谱和同谱异物现象的存在,用单一的分类方法对影像进行分类其精确度往往不能满足应用目的要求.用监督分类与非监督分类相结合的方法来对影像进行分类,却常常可以到达需要的目的.利用这种方法分类时首先用监督分类法如多层神经网络的BP算法将遥感图像概略地划分为几个大类,再用非监督分类法如K-Means聚类和ISODATA聚类对第一步已分出的各个大类进行细分,直到满足要求为止[13].监督分类与非监督分类的结合的复合分类方法,改变了传统的单一的分类方法对影像进行分类的弊端,弥补了其不足,为影像分类开辟了广阔的前景.
常规的图像分类主要有两种方法:监督分类和非监督分类:
监督分类(supervised classification)又称训练场地法,是以建立统计识别函数为理论基础,依据典型样本训练方法进行分类的技术。即根据已知训练区提供的样本,通过选择特
征参数,求出特征参数作为决策规则,建立判别函数以对各待分类影像进行的图像分类,是模式识别的一种方法。要求训练区域具有典型性和代表性。判别准则若满足分类精度要求,则此准则成立;反之,需重新建立分类的决策规则,直至满足分类精度要求为止。常用算法有:判别分析、最大似然分析、特征分析、序贯分析和图形识别等。
非监督分类是以不同影像地物在特征空间中类别特征的差别为依据的一种无先验(已知)类别标准的图像分类,是以集群为理论基础,通过计算机对图像进行集聚统计分析的方法。根据待分类样本特征参数的统计特征,建立决策规则来进行分类。而不需事先知道类别特征。把各样本的空间分布按其相似性分割或合并成一群集,每一群集代表的地物类别,需经实地调查或与已知类型的地物加以比较才能确定。是模式识别的一种方法。一般算法有:回归分析、趋势分析、等混合距离法、集群分析、主成分分析和图形识别等。
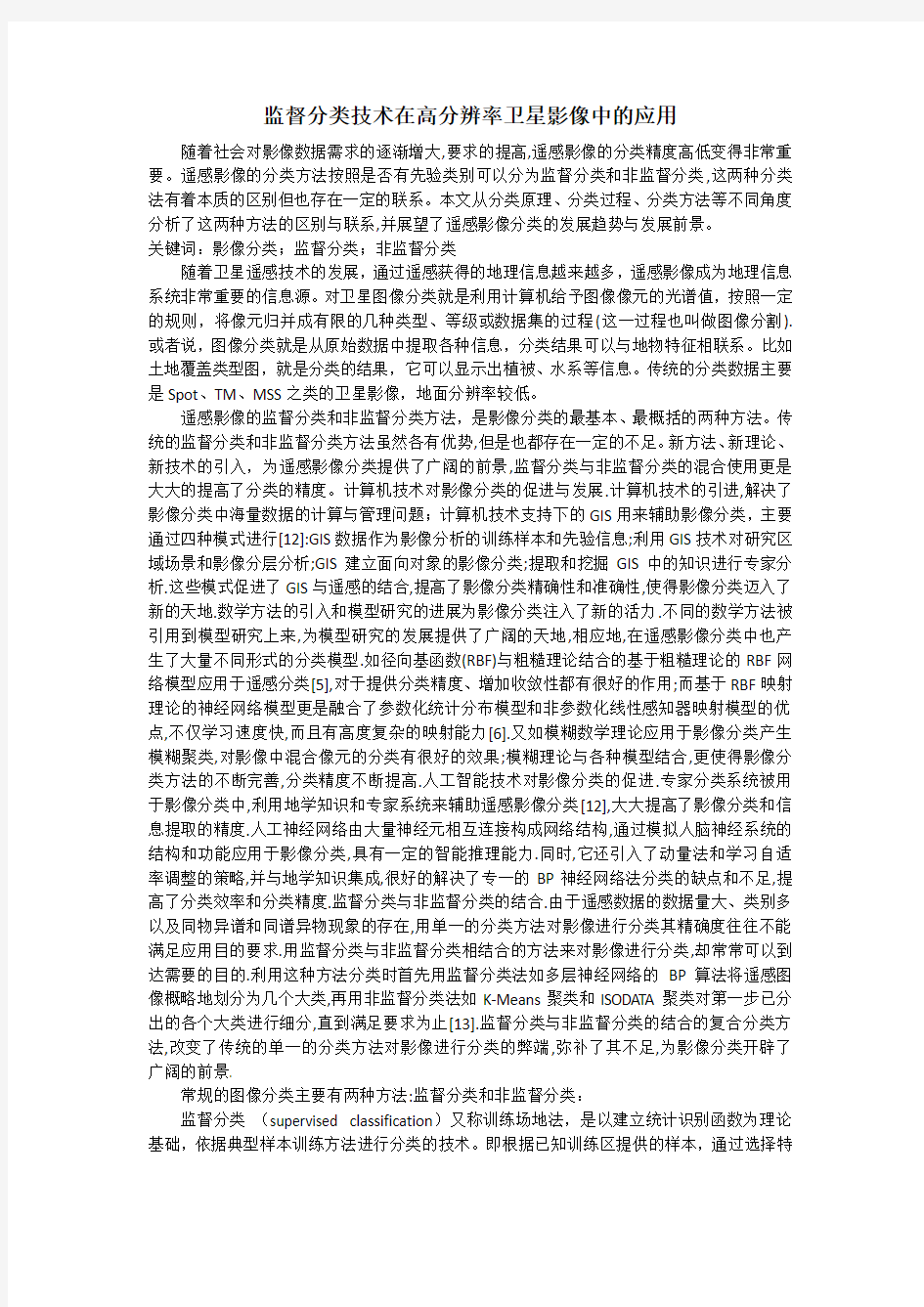
非监督分类完全按照影像中像元的光谱特性进行统计分类,它的自动化程度较高,人为的干预较少.常常用于对分类区缺乏了解的情况.针对QuickBird影像的分辨率,我们认为非监督分类并不适用,因此我们重点进行了监督分类的应用研究. 遥感影像的监督分类是在已知类别的训练场地上提取各类别训练样本,通过选择特征变量、确定判别函数或判别式把影像中的各个像元点划归到各个给定类的分类.它的基本思想是:首先根据类别的先验知识确定判别函数和相应的判别准则,利用一定数量的已知类别样本的观测值确定判别函数中的待定参数,然后将未知类别的样本的观测值代入判别函数,再根据判别准则对该样本的所属类别做出判定.遥感影像的非监督分类也称为聚类,它是事先无法知道类别的先验知识,在没有类别先验知识的情况下将所有样本划分为若干类别的方法.它的基本思想是事先不知道类别的先验知识,仅根据地物的光谱特征的相关性或相似性来进行分类,再根据实地调查数据比较后确定其类别属性.二者分类流程如图1所示.
图1影像非监督分类与监督分类流程图
监督分类中常用的具体分类方法包括:
最小距离分类法(minimum distance classifier):
最小距离分类法是用特征空间中的距离作为像元分类依据的。最小距离分类包括最小距离判别法和最近邻域分类法。最小距离判别法要求对遥感图像中每一个类别选一个具有代表意义的统计特征量(均值),首先计算待分象元与已知类别之间的距离,然后将其归属于距离最小的一类。最近邻域分类法是上述方法在多波段遥感图像分类的推广。在多波段遥感图像分类中,每一类别具有多个统计特征量。最近邻域分类法首先计算待分象元到每一类中每一个统计特征量间的距离,这样,该象元到每一类都有几个距离值,取其中最小的一个距离作为该象元到该类别的距离,最后比较该待分象元到所有类别间的距离,将其归属于距离最
小的一类。最小距离分类法原理简单,分类精度不高,但计算速度快,它可以在快速浏览分类概况中使用。
多级切割分类法(multi-level slice classifier):是根据设定在各轴上值域分割多维特征空间的分类方法。通过分割得到的多维长方体对应各分类类别。经过反复对定义的这些长方体的值域进行内外判断而完成各象元的分类。这种方法要求通过选取训练区详细了解分类类别(总体)的特征,并以较高的精度设定每个分类类别的光谱特征上限值和下限值,以便构成特征子空间。多级切割分类法要求训练区样本选择必须覆盖所有的类型,在分类过程中,需要利用待分类像元光谱特征值与各个类别特征子空间在每一维上的值域进行内外判断,检查其落入哪个类别特征子空间中,直到完成各像元的分类。
多级分割法分类便于直观理解如何分割特征空间,以及待分类像元如何与分类类别相对应。由于分类中不需要复杂的计算,与其它监督分类方法比较,具有速度快的特点。但多级分割法要求分割面总是与各特征轴正交,如果各类别在特征空间中呈现倾斜分布,就会产生分类误差。因此运用多级分割法分类前,需要先进行主成分分析,或采用其它方法对各轴进行相互独立的正交变换,然后进行多级分割。
最大似然分类法(maximum likelihood classifier):
最大似然分类法是经常使用的监督分类方法之一,它是通过求出每个像元对于各类别归属概率(似然度)(likelihood),把该像元分到归属概率(似然度)最大的类别中去的方法。最大似然法假定训练区地物的光谱特征和自然界大部分随机现象一样,近似服从正态分布,利用训练区可求出均值、方差以及协方差等特征参数,从而可求出总体的先验概率密度函数。当总体分布不符合正态分布时,其分类可靠性将下降,这种情况下不宜采用最大似然分类法。
最大似然分类法在多类别分类时,常采用统计学方法建立起一个判别函数集,然后根据这个判别函数集计算各待分象元的归属概率(似然度)。这里,归属概率(似然度)是指:对于待分象元x,它从属于分类类别k的(后验)概率。
设从类别k中观测到x的条件概率为P(x|k),则归属概率Lk可表示为如下形式的判别函数:
式中P(k)为类别k的先验概率,它可以通过训练区来决定。此外,由于上式中分母和类别无关,在类别间比较的时候可以忽略。
最大似然分类必须知道总体的概率密度函数P(x|k)。由于假定训练区地物的光谱特征和自然界大部分随机现象一样,近似服从正态分布(对一些非正态分布可以通过数学方法化为正态问题来处理),因此通常可以假设总体的概率密率函数为多维正态分布,通过训练区,按最大似然度测定其平均值及方差、协方差。此时,像元X归为类别k的归属概率Lk表示如下(这里省略了和类别无关的数据项)。
(6-9)式中:n:特征空间的维数;
P(k):类别k的先验概率;
Lk(x):像元X归并到类别k的归属概率;
X:像元向量;
μk 类别k的平均向量(n维列向量);
det:矩阵A的行列式
∑k:类别k的方差、协方差矩(n×n矩阵).
这里注意:各个类别的训练数据至少要为特征维数的2到3倍以上这样才能测定具有较高精度的均值及方差、协方差;如果2个以上的波段相关性强,那么方差协方差矩阵的逆矩阵可能不存在,或非常不稳定,在训练样本几乎都取相同值的均质性数据组时这种情况也会出现。此时,最好采用主成分变换,把维数压缩成仅剩下相互独立的波段,然后再求方差协方差矩阵;当总体分布不符合正态分布时,不适于采用正态分布的假设为基础的最大似然分类法。
当各类别的方差、协方差矩阵相等时,归属概率变成线性判别函数,如果类别的先验概率也相同,此时是根据欧氏距离建立的的线性判别函数,特别当协方差矩阵取为单位矩阵时,最大似然判别函数退化为采用欧氏距离建立的最小距离判别法。
高分辨率卫星影像的监督分类
监督分类要求首先要进行外业调查,依据所拥有的数据资料定义支持假设的规则、条件和变量,建立起不同地类与遥感图像光谱值的对应关系.在监督分类过程中,首先选择可以识
别或者借助其他信息可以断定其类型的像元建立训练样地,然后基于该训练样地使计算机系统能够自动识别具有相同特性的像元.对分类结果进行评价后再对训练样地进行修改,多次反复后建立一个比较正确的训练样地,并在此基础上最终进行分类.
监督分类注意事项
(1)分类应从下往上,即每一地类应先细分为若干小类,然后再依需要自下而上合并成大类。
(2)每一类的训练区文件aoi与特征文件sig应该一一对应,即每一类对应的训练区和特征文件都应该保存为一个单独的文件,以方便在调整训练区的时候进行修改。
(3)精度检验后若精度不符合要求,需要重新调整训练区,再次分类,直到精度满足要求为止。
非监督分类的主要方法
动态聚类.它是按某些原则选择一些代表点作为聚类的核心,然后将其余待分点按某种方法(判据准则)分到各类中去,完成初始分类,之后再重新计算各聚类中心,把各点按初始分类判据重新分到各类,完成第一次迭代.然后修改聚类中心进行下一次迭代,对上次分类结果进行修改,如此反复直到满意为止.动态聚类的方法是目前非监督分类中比较先进、也较为常用的方法.典型的聚类过程包括以下几步:选定初始集群中心;用一判据准则进行分类;循环式的检查和修改;输出分类结果.聚类的方法主要有基于最邻近规则的试探法、K-means均值算法、迭代自组织的数据分析法(ISODATA)等.其中比较成熟的是K-means和ISODATA算法,它们较之其他分类方法的优点是把分析判别的统计聚类算法和简单多光谱分类融合在一起,使聚类更
准确、客观.但这些传统的建立在统计方法之上的分类法存在着一定的缺点:很难确定初始化
条件;很难确定全局最优分类中心和类别个数;很难融合地学专家知识.基于尺度空间的分层
聚类方法(SSHC)是一种以热力学非线性动力机制为理论基础的新型聚类算法[10],它与传统
聚类算法相比最大的优点是其样本空间可服从自由分布,可获取最优聚类中心点及类别,可在聚类过程中融合后验知识,有更多的灵活性和实用性.模糊聚类法.模糊分类根据是否需要先
验知识也可以分为监督分类和非监督分类.事实上,由于遥感影像的复杂性和不精确性等特点,预先很难获得所有有代表性样本的各类别的精确含量,因此很多情况下用纯粹的监督方法作模糊分类并不现实.模糊聚类属于非监督分类的一种,它根据样本间的统计量的相似程度作
为模糊隶属度,在无预知类别的前提下对数据集中各点作含量划分.模糊聚类算法有多种,如
基于模糊等价关系的模糊聚类分析法、基于最大模糊支撑树的模糊聚类分析法等[11],最典型的模糊聚类法是模糊迭代自组织的数据分析法———Fussy-ISODATA.但纯粹的非监督分类对影像一无所知的情况下进行所得到的结果往往与实际特征存在一定的差异,因此聚类结果的精度并不一定能够满足实际应用的要求,还需要地学知识的辅助,也就是部分监督的
Fussy-ISODATA聚类.
系统聚类.这种方法是将影像中每个像元各自看作一类,计算各类间均值的相关系数矩阵,从
中选择最相关的两类进行合并形成新类,并重新计算各新类间的相关系数矩阵,再将最相关的两类合并,这样继续下去,按照逐步结合的方法进行类与类之间的合并.直到各个新类间的相
关系数小于某个给定的阈值为止.
分裂法.又称等混合距离分类法,它与系统聚类的方法相反,在开始时将所有像元看成一类,求出各变量的均值和均方差,按照一定公式计算分裂后两类的中心,再算出各像元到这两类中心的聚类,将像元归并到距离最近的那一类去,形成两个新类.然后再对各个新类进行分类,只要有一个波段的均方差大于规定的阈值,新类就要分裂.
2利用监督分类的结果对地表信息统计计算
将栅格文件转化为矢量文件,可以使文件中具有矢量信息,这样我们可以获得分类图中的矢量信息,从量化的角度对地表的状况进行研究.
计算思想:
用监督分类的方法可以得到栅格分类结果图,在ENVI平台上,利用其栅格矢量转换工具将其转换成矢量数据,形成具有矢量信息的分类结果图.这样,我们就可以根据用户的不同的
需求计算各种统计信息.比如:利用矢量文件中的面积属性可以计算出在一定区域内各种地物所占的百分比等.
应用试验
本文以某城市山7个波段组成的TM多光谱图像作为数据源即原始的遥感图像(如图1),以波段5,4,3模拟真彩色图像合成RGB进行显T,根据图像的光谱特征,通过人工判读把图像中的地物分为6类:林地、耕地、草地、裸地、沙地和其他。然后通过绘制多边形选择感兴趣区进行样本的选取,每类地物的感兴趣区均用不同颜色加以区别。
3分类结果对比分析
本文利用ENVI软件中的监督分类模块对同一TM图像分别用最小距离法、最大似然法、
神经网络法、支持向量机法四种分类方法进行监督分类,同时这四种分类都采用了相同的训练样本,这样能更好的比较这四种分类方法。图3}4}5}6分别为采用最小距离法,最大似然法、神经网络法、支持向量机法对原始图像进行分类的结果。
从上面的分类结果图与原始图像相比较可以看出,不同的分类方法对于同一地物的类别有不同的判别,但是明显可以看出神经网络法和支持向量机法的分类效果更好。但是林地和草地出现了错分现象。
虽然可以从分类结果图中看出分类效果和差异,但是为了进一步直观地分析不同分类方法的分类能力,在执行四种不同的监督分类方法后,使用同一种评价方法:混淆矩阵来评价分类结果,结果包括总体分类的精度、制图精度和用户精度、Kappa系数、混淆矩阵(概率)以及错分误差和漏分误差。为了定量地比较各个分类方法,本文选取总体分类精度和Kappa 系数来评价这四种分类方法的分类精度。
矩阵(概率)以及错分误差和漏分误差。为了定量地比较各个分类方法,本文选取总体分类精度和Kappa系数来评价这四种分类方法的分类精度。
总体分类精度:等于被正确分类的像元总和除以总像元数。被正确分类的像元数目沿着混淆矩阵的对角线分布,总像元数等于所有真实参考源的像元总数。
Kappa系数:它是通过把所有真实参考的像元总数(N)乘以混淆矩阵对角线的和,减去某一类中真实参考像元数与该类中被分类像元总数之积后,再除以像元总数的平方减去某一类中真实参考像元总数与该类中被分类像元总数之积对所有类别求和的结果。
分类精度结果见表1:
对以上实验结果进行对比分析,可以得出这四种分类方法中,支持向量机分类法具有最高的分类精度,对于容易错分的地物也得到了比较好的区分,能更准确地提取出目标地物,但是计算时间长。最小距离分类法的分类精度最低,但是算法简单,计算时间相当短。最大似然分类法和神经网络分类法的精度也很高,但是最大似然法的计算时间很短,神经网络法的计算时间是这四种分类方法中最长的。所以像支持向量机分类法这样的新方法可以更加深入广泛地应用。同样的,若是神经网络模型建立合理,速度应该也会加快,甚至超过传统分类方法。最小距离分类法的精度不高,主要是受模式散布影响,在全图范围内一次性地对所有地物分类,分类地物之间容易山于相近的光谱信息互相干扰。最大似然法山于分类
精度较高,且计算时间快,所以仍是使用较多的分类方法。
3结束语
遥感技术已经在很多行业中得到了应用,利用高分辨率卫星影像得到的矢量分类图可以提供给用户地表状况矢量化的信息.利用遥感分类的方法对地表量化信息的提取,速度快,精
度高,具有很高的实用价值.遥感技术已经在很多行业中得到了应用,利用高分辨率卫星影像
得到的矢量分类图可以提供给用户地表状况矢量化的信息.利用遥感分类的方法对地表量化信息的提取,速度快,精度高,具有很高的实用价值。
参考文献
[1]游代安,蒋定华,余旭初.GIS辅助下的Bayes法遥感影像分类[J].测绘学院学
报,2001,18(2):113-117.
[2]朱建华,刘政凯,俞能海.一种多光谱遥感图象的自适应最小距离分类方法[J].中国图象图形学报,2000,5(1):22-24.
[3]贾永红,张春森,王爱平.基于BP神经网络的多源遥感影像分类[J].西安科技学院学
报,2001,21(1):58-60.
[4]黄贤武.数字图像处理与压缩编码技术.成都:成都电子科技
大学出版社,2001
[5]潘云鹤.遥感图像信息系统.北京:科学出版社,2000
[6]骆剑承,周成虎,杨艳.基于径向基函(RBF)映射理论的遥感影像分类模型研究[J].中国图象图形学报,2000,5(2):94-
99.
[7]Olivier Debeir,Patrice Latinne,Isabelle Vanden Steen.Remote Sensing Classification Of Spectral,spatial And Contextual Data
Using Multiple Classifier System[J].Image Anal Stereol,2001,20(Suppl 1):584-589.
[8]Lakshmanan V,DeBrunner V,Rabin R.An Unsupervised,Agglomerative,Spatially Aware Texture Segmentation Technique
[9]曾生根,王小敏,范瑞彬,等.基于独立量分析的遥感图像分类技术[J].遥感学
报,2004,8(2):150-157.
[10]骆剑承,梁怡,周成虎.基于尺度空间的分层聚类方法及其在遥感影像分类中的应用[J].测
绘学报,1999,28(4):319-324.
[11]徐建华.现代地理学中的数学方法[M].北京:高等教育出版社,2002.
[12]王莹,刘敏莺,黄文骞.GIS对遥感影像分类判读的辅助作用[J].海洋测绘,2002,22(3):12-15.
[13]杨存建,周成虎.基于知识的遥感图像分类方法的探讨[J].地理学与国土研
究,2001,17(1):72-77.
[14]靳文戟,刘政凯.多类别遥感图像的复合分类方法[J].环境遥感,1995,10(4):298-302.
[15]梅安新,彭望绿,秦其明,刘慧平遥感导论「M」北京:高等教育出版社,2001
[16]李石华,王金亮,毕艳,陈姚,朱妙园,杨帅,朱佳遥感图像分类方法研究综述田国土资源遥感,2005,(2):1一6
[17]邓书斌ENVI遥感图像处理方法[M」北京:科学出版社,2010
[18]赵春霞,钱乐祥遥感影像监督分类与非监督分类的比较日]河南大学学报(自然科版),2004, (3) :90一93
[19]李爽,丁圣彦,许叔明遥感影像分类方法比较研究日]河南大学学报(自然科学版),2002 , (2) : 7一73
[20]王圆圆,李京遥感影像土地利用/覆盖分类方法研究综述日]遥感信息,2004 , (1) : 53一59
[21]巫兆聪.基于粗糙理论的RBF网络及其遥感影像分类应用[J].测绘学报,2003,32(1):53-57.
高分辨率卫星影像数据报价
GeoEye-1/IKONOS卫星影像数据价格表 说明: 1. 所有影像未经镶嵌处理。 2. 存档与编程: A. 存档数据:3个月前采集的Geo Ortho Kit数据 B. 编程数据:未采集的数据和3个月以内新采集的数据 3. 标准交付期: A. 存档数据:合同签订后5-10个工作日 B. 编程数据:数据接收成功后10-15个工作日 4. 起订面积: A. 存档数据:49km22 (最短边长不小于5公里) B. 编程数据:100km22 (最短边长不小于5公里)
5. 编程费用:标准编程免收编程费,如需加急编程,每个工作区收取38000 元编程费。 6. 运保费:人民币500元。 7. 含云量规定:实际含云量面积低于20%的影像为合格产品,若要求云量覆 盖在10%以内的影像每平方公里加价25%,要求云量覆盖在5%以内的影像每平方公里加价50%。 8. 目标仰角规定:标准拍摄目标仰角在60°- 90°之间。若要求拍摄目标仰 角在72°-90°之间,每平方公里需加收10%的附加费。 QuickBird/WorldView-1/WorldView-2影像数据价格表一、真彩色\彩红外\全色\4波段多光谱(MS1): 二、4波段捆绑(Pan+MS1)\ 4波段融合数据: 三、立体像对(基础产品):
卫星编程级别说明: 1.S级:优先级别最低的编程订单,适用于对影像获取时间要求不严格的客户,以及订单竞争不激烈的地区。优点是单价比较低,客户可以自己设定采集开始和截止时间, 或接受DG提供的采集周期;缺点是获取时间比较长.云量覆盖率不大于15% 。 2.S+级:优先级别比S级订单高,适用于急于获取合格影像的客户,以及订单竞争一般激烈的地区。优点是客户可以自己设定采集开始和截止时间,或接受DG提供的采集周期,单价相对较低,可以保证获取影像的质量。云量覆盖率不大于15% 。 3.AS级:优先级别较高,适用于急于获取合格影像的客户,以及订单竞争激烈的地区。客户必须接受DG提供的采集周期,并接受分批交付。优点是订单优先级别高,如果在DG提供的采集周期内没有完成采集,客户可以选择用DG现有的其他存档数据免费填充未完成的区域,或继续延长订单的采集周期。如果客户选择取消编程订单的未完成部分 并用免费存档数据填充未完成区域,应在原AS级订单取消后180天进行免费数据的申请;如果客户选择延长采集周期,DG会重新评估并给出新的采集周期,客户必须接受这个新的采集周期。云量覆盖率不大于15% 。 4.SS级:优先级别最高的编程订单,目标区域宽度要求小于13.5 公里,南北长度小于165 公里。DG会在未来2周的时间内,指定一个日期进行单次接收,客户可以提前48 小时确认订单,订单一旦确认,不能取消,无论云量多少均收全款。适用于灾害分析、
遥感影像的分类处理
摘要 在面向对象的影像分类方法中,首先需要将遥感影像分割成有意义的影像对象集合,进而在影像对象的基础上进行特征提取和分类。本文针对面向对象影像分类思想的关键环节展开讨论和研究,(1) 采用基于改进分水岭变换的多尺度分割算法对高分辨率遥感影像进行分割。构建了基于高斯尺度金字塔的多尺度视觉单词,并且通过实验证明其表达能力优于经典的词包表示。最后,在词包表示的基础上,利用概率潜在语义分析方法对同义词和多义词较强的鉴别能力对影像对象进行分析,找出其最可能属于的主题或类别,进而完成影像的分类。 近些年来,随着航空航天平台与传感器技术的高速发展,获取的遥感影像的分辨率越来越高。高分辨率遥感影像在各行业部门的应用也越来越广泛,除了传统的国土资源、地质调查和测绘测量等部门,还涉及到城市规划、交通旅游和环境生态等领域,极大地拓展了遥感影像的应用范围。因此,对高分辨率遥感影像的处理分析成为备受关注的领域之一。高分辨率遥感影像包括以下三种形式:高空间分辨率(获取影像的空间分辨率从以前的几十米提高到1 至5 米,甚至更高);高光谱分辨率(电磁波谱被不断细分,获取遥感数据的波段数从几十个到数百个);高时间分辨率(遥感卫星的回访周期不断缩短,在部分区域甚至可以连续观测)。本文所要研究的高分辨率遥感影像均是指“高空间分辨率”影像。 相对于中低分辨率的遥感数据,高空间分辨率遥感影像具有更加丰富的空间结构、几何纹理及拓扑关系等信息,对认知地物目标的属性特征更加方便,如光谱、形状、纹理、结构和层次等。另外,高分辨率遥感影像有效减弱了混合像元的影响,并且能够在较小的空间尺度下反映地物特征的细节变化,为实现更高精度的地物识别和分类提供了可能。 然而,传统的遥感影像分析方法主要基于“像元”进行,它处于图像工程中的“图像处理”阶段(见图1-1),已然不能满足当今遥感数据发展的需求。基于“像元”的高分辨率遥感影像分类更多地依赖光谱特征,而忽视影像的纹理、形状、上下文和结构等重要的空间特征,因此,分类结果会产生很严重的“椒盐(salt and pepper)现象”,从而影响到分类的精度。虽然国内外的很多研究人员针对以上缺陷提出了很多新的方法,如支持向量机(Support Vector Machine,SVM) 、纹理聚类、分层聚类(Hierarchical Clustering) 、神经网络(Neural Network, NN)等,但仅依靠光谱特征的基于像元的方法很难取得更好的分类结果。基于“像元”的传统分类方法还有着另一个局限:无法很好的描述和应用地物目标的尺度特征,而多尺度特征正是遥感信息的基本属性之一。由于在不同的空间尺度上,同样的地表空间格局与过程会表现出明显的差异,因此,在单一尺度下对遥感影像进行分析和识别是不全面的。为了得到更好的分类结果,需要充分考虑多尺度特征。 针对以上问题,面向对象的处理方法应运而生,并且逐渐成为高空间分辨率遥感影像分析和识别的新途径。所谓“面向对象”,即影像分析的最小单元不再是传统的单个像元,而是由特定像元组成的有意义的同质区域,也即“对象”;因此,在对影像分析和识别的过程
国产高分辨率卫星影像自动化高精度处理
国产高分辨率卫星影像自动化高精度处理----------卫星影像基于已有DOM/DEM自动化处理测试报告1、测试情况 1.1.数据情况 影像类型景数单景全色大小单景多光谱大小 高分一号31624M156M 天绘一号15976M137M资源1号02C7300M*2103M资源三号6 1.12G606M 1.2参考数据 参考DOM:影像分辨率为2米; 参考DEM:1:1万分幅DEM,格网间距为5米。 1.3机器性能 电脑工作站一台,其主要性能配置如下: CPU:Intel Xeon E5-269016核 RAM:128G 磁盘驱动器:Samsung SSD850
2 、作业流程 3、效率统计 3.1预处理 已有DEM和DOM预处理可在任务开展前,电脑全自动化进行预 处理,本次任务预处理1:10000分幅参考DEM2871,参考DOM40.5G,利用晚上时间(18小时)完成。 3.2自动定向纠正与融合处理 备注:以下时间全为计算机自动计算的时间,不需额外人工处理 影像类型全色影像自动定向与纠正全色与多光谱影像配准纠正与融合 高分一号4.5分钟/景(总共20景,7核 并行,90分钟完成) 1.2分钟/景(总共31景,12核并行, 37分钟完成) 天绘一号9分钟/景(总共9景,5核并 行,85分钟完成) 6分钟/景(总共15景,15核并行, 106分钟完成) 资源三号25分钟/景(总共5景,单核 处理,128分钟完成) 45分钟/景(总共5景,单核处理, 220分钟完成)
4、成果展示 4.1控制点分布情况 备注:因计算机保密要求,以下所有图片均为彩色打印再扫描得到的,色彩有些偏色。 图1高分一号全色影像基于底图匹配控制点分布情况 图2天绘全色影像基于底图匹配控制点分布情况
高分辨率遥感影像分类实验报告
高分辨率遥感影像分类实验报告 班级:___________________ 姓名:___________________ 学号:___________________ 指导老师:_______________ 地球科学与环境工程学院 二?一四年六月
目录 1 实验方法——面向对象方法 (1) 2 实验内容 (1) 2.1 影像预处理 (1) 2.1.1 影像数据融合 (1) 2.1.2 影像增强处理 (2) 2.2 创建工程 (2) 2.3 分割处理 (3) 2.4 分类 (4) 2.4.1 水体 (4) 2.4.2 陆地 (5) 2.4.3 植被 (6) 2.4.4 裸土 (7) 2.4.5 建筑物 (8) 2.4.6 道路 (9) 2.4.7 阴影 (10) 2.4.8 总体分类图 (12) 3 结语 (13)
1实验方法——面向对象方法 面向对象方法是一个模拟人类大脑认知的过程,将图像分割为不同均质的对 象,充分利用对象所包含的信息,将知识库转换为规则特征,从而提取影像信息。 因为分析的是对象而不是像元,因此我们可以利用对象丰富的语义信息, 结合各 种地学概念,如面积、距离、光谱、尺度、纹理等进行分析。 面向对象的遥感影像分析方法与传统的面向像元的影像分析方法不同。 首先 需要使用一定方法对遥感影像进行分割, 在提取分割单元(图像分割后所得到的 内部属性相对一致或均质程度较高的图像区域) 的各种特征后,在特征空间中进 行对象识别和标识,从而最终完成信息的分类与提取。 2实验内容及详细过程 2.1影像预处理 2.1.1影像数据融合 实验数据为QuickBird 影像,包括4个多光谱波段以及一个全色波段。 QuickBird 影像星下点分辨率:全色为 0.61m ,多光谱为2.44m 。对于面向对象 影像分类 来说,越高的高空间分辨率越好,但在对对象进行分类时,光谱信息同 样重要,因此,可将高分辨率的全色影像和多光谱影像进行数据融合。 使用 ERDAS 进行数据融合: Interprete u spatialenchancemen ^resolution mergeo 图1 全色影像与多光谱影像融合 Ib^pul Fh (*.网| MJitiMewl lf 北京揽宇方圆信息技术有限公司 高分辨率遥感卫星有哪些 高分辨率遥感可以以米级甚至亚米级空间分辨率精细观测地球,所获取的高空间分辨率遥感影像可以清楚地表达地物目标的空间结构与表层纹理特征,分辨出地物内部更为精细的组成,地物边缘信息也更加清晰,为有效的地学解译分析提供了条件和基础。随着高分辨率遥感影像资源日益丰富,高分辨率遥感在测绘制图、城市规划、交通、水利、农业、林业、环境资源监测等领域得到了飞速发展。 北京揽宇方圆信息技术有限公司是国内的领先遥感卫星数据机构,而且是整合全球的遥感卫星数据资源,分发不同性能、技术应用上可以互补的多种卫星影像,包括光学、雷达卫星影像、历史遥感影像等各种卫星数据服务,各种专业应用目的的图像处理、解译、顾问服务以及基于卫星影像的各种解决方案等。遥感卫星影像数据贯穿中国1960年至今的所有卫星影像数据,是中国遥感卫星数据资源最多的专业遥感卫星数据服务机构,提供多尺度、多分辨率、全覆盖的遥感卫星影像数据服务,最大限度的保证了遥感影像数据获取的及时性和完整性。 一、卫星类型 (1)光学卫星:worldview1、worldview2、worldview3、worldview4、quickbird、geoeye、ikonos、pleiades、deimos、spot1、kompsat系例、spot2、spot3、spot4、spot5、spot6、spot7、landsat5(tm)、Sentinel-卫星、landsat(etm)、rapideye、alos、kompsat系例卫星、planet卫星、北京二号、高景一号、资源三号、高分一号、高分二号、环境卫星。 (2)雷达卫星:terrasar-x、radarsat-2、alos雷达卫星、高分三号卫星、哨兵卫星 (3)侦查卫星:美国锁眼卫星全系例(1960-1980) 二、卫星分辨率 (1)0.3米:worldview3、worldview4 (2)0.4米:worldview3、worldview2、geoeye、kompsat-3A (3)0.5米:worldview3、worldview2、geoeye、worldview1、pleiades 高分辨率遥感影像分类实验报告 班级: 姓名: 学号: 指导老师: 地球科学与环境工程学院 二〇一四年六月 目录 1实验方法——面向对象方法 (1) 2实验内容 (1) 2.1 影像预处理 (1) 2.1.1影像数据融合 (1) 2.1.2 影像增强处理 (2) 2.2 创建工程 (2) 2.3 分割处理 (3) 2.4 分类 (4) 2.4.1 水体 (4) 2.4.2陆地 (5) 2.4.3 植被 (6) 2.4.4 裸土 (7) 2.4.5 建筑物 (8) 2.4.6 道路 (9) 2.4.7 阴影 (10) 2.4.8 总体分类图 (12) 3 结语 (13) 1实验方法——面向对象方法 面向对象方法是一个模拟人类大脑认知的过程,将图像分割为不同均质的对象,充分利用对象所包含的信息,将知识库转换为规则特征,从而提取影像信息。因为分析的是对象而不是像元,因此我们可以利用对象丰富的语义信息,结合各种地学概念,如面积、距离、光谱、尺度、纹理等进行分析。 面向对象的遥感影像分析方法与传统的面向像元的影像分析方法不同。首先需要使用一定方法对遥感影像进行分割,在提取分割单元(图像分割后所得到的内部属性相对一致或均质程度较高的图像区域)的各种特征后,在特征空间中进行对象识别和标识,从而最终完成信息的分类与提取。 2实验内容及详细过程 2.1 影像预处理 2.1.1影像数据融合 实验数据为QuickBird影像,包括4个多光谱波段以及一个全色波段。QuickBird影像星下点分辨率:全色为0.61m,多光谱为2.44m。对于面向对象影像分类来说,越高的高空间分辨率越好,但在对对象进行分类时,光谱信息同样重要,因此,可将高分辨率的全色影像和多光谱影像进行数据融合。 使用ERDAS进行数据融合:Interpreter→spatialenchancement→resolution merge。 图 1 全色影像与多光谱影像融合 遥感图像分类方法的国内外研究现状与发展趋势 遥感图像分类方法的研究现状与发展趋势 摘要:遥感在中国已经取得了世界级的成果和发展,被广泛应用于国民经济发展的各个方面,如土地资源调查和管理、农作物估产、地质勘查、海洋环境监测、灾害监测、全球变化研究等,形成了适合中国国情的技术发展和应用推广模式。随着遥感数据获取手段的加强,需要处理的遥感信息量急剧增加。在这种情况下,如何满足应用人员对于大区域遥感资料进行快速处理与分析的要求,正成为遥感信息处理面临的一大难题。这里涉及二个方面,一是遥感图像处理本身技术的开发,二是遥感与地理信息系统的结合,归结起来,最迫切需要解决的问题是如何提高遥感图像分类精度,这是解决大区域资源环境遥感快速调查与制图的关键。 关键词:遥感图像、发展、分类、计算机 一、遥感技术的发展现状 遥感技术正在进入一个能够快速准确地提供多种对地观测海量数据及应用研究的新阶段,它在近一二十年内得到了飞速发展,目前又将达到一个新的高潮。这种发展主要表现在以下4个方面: 1. 多分辨率多遥感平台并存。空间分辨率、时间分辨率及光谱分辨率普遍提高目前,国际上已拥有十几种不同用途的地球观测卫星系统,并拥有全色0.8~5m、多光谱3.3~30m的多种空间分辨率。遥感平台和传感器已从过去的单一型向多样化发展,并能在不同平台 上获得不同空间分辨率、时间分辨率和光谱分辨率的遥感影像。民用遥感影像的空间分辨率达到米级,光谱分辨率达到纳米级,波段数已增加到数十甚至数百个,重复周期达到几天甚至十几个小时。例如,美国的商业卫星ORBVIEW可获取lm空间分辨率的图像,通过任意方向旋转可获得同轨和异轨的高分辨率立体图像;美国EOS卫星上的MOiDIS-N传感器具有35个波段;美国NOAA的一颗卫星每天可对地面同一地区进行两次观测。随着遥感应用领域对高分辨率遥感数据需求的增加及高新技术自身不断的发展,各类遥感分辨率的提高成为普遍发展趋势。 2. 微波遥感、高光谱遥感迅速发展微波遥感技术是近十几年发展起来的具有良好应用前景的主动式探测方法。微波具有穿透性强、不受天气影响的特性,可全天时、全天候工作。微波遥感采用多极化、多波段及多工作模式,形成多级分辨率影像序列,以提供从粗到细的对地观测数据源。成像雷达、激光雷达等的发展,越来越引起人们的关注。例如,美国实施的航天飞机雷达地形测绘计划即采用雷达干涉测量技术,在一架航天飞机上安装了两个雷达天线,对同一地区一次获取两幅图像,然后通过影像精匹配、相位差解算、高程计算等步骤得到被观测地区的高程数据。高光谱遥感的出现和发展是遥感技术的一场革命。它使本来在宽波段遥感中不可探测的物质,在高光谱遥感中能被探测。高光谱遥感的发展,从研制第一代航空成像光谱仪算起已有二十多年的历史,并受到世界各国遥感科学家的普遍关注。但长期以来,高光谱遥感一直处在以航空为基础的研究发展阶段,且主要 高分辨率遥感影像数据一体化测图系统PixelGrid 北京四维空间数码科技有限公司 一、概况介绍 高分辨率遥感影像数据一体化测图系统PixelGrid(以下简称“PixelGrid”)是由中国测绘科学研究院自主研发的“十一五”重大科技成果,获得2009年度国家测绘科技进步一等奖。 为将这一重大科技成果实现产业化,2008年开始,由中国测绘科学研究院参股单位北京四维空间数码科技有限公司进行成果转化和产品化,并开展销售。 该软件是我国西部1:5万地形图空白区测图工程以及第二次全国土地调查工程的主力软件, 被誉为国产的“像素工厂”。 PixelGrid以其先进的摄影测量算法、集群分布式并行处理技术、强大的自动化业务化处理能力、高效可靠的作业调度管理方法、友好灵活的用户界面和操作方式,全面实现了对卫星影像数据、航空影像数据以及低空无人机影像数据的快速自动处理,可以完成遥感影像从空中三角测量到各种比例尺的DEM/DSM、DOM等测绘产品的生产任务。 PixelGrid软件主界面。 二、主要特点 PixelGrid系统以现代摄影测量与遥感科学技术理论为基础,融合计算机技术和网络通讯技术,采用基于RFM通用成像模型的大范围遥感影像稀少或无控制区域网平差、基于旋转/缩放不变性特征多影像匹配的高精度航空影像自动空三、基于多基线/多重特征的高精度DEM/DSM自动提取、等高线数据半自动采集及网络分布式编辑、基于地理信息数据库等多源控制信息的高效影像地图制作、基于松散耦合并行服务中间件的集群分布式并行计算等一系列核心关键技术,是中国测绘科学研究院研制的一款类似“像素工厂”(ISTAR PixelFactoryTM)的新一代多源航空航 天遥感数据一体化高效能处理系统。 北京揽宇方圆信息技术有限公司 全色卫星影像多光谱卫星影像高光谱卫星影像 随着光谱分辨率的不断提高,光学遥感的发展过程可分为:全色(Panchromatic)→彩色(Color Photography)→多光谱(Multispectral)→高光谱(hyspectral)。 注: 全色波段(Panchromatic band),因为是单波段,在图上显示是灰度图片。全色遥感影像一般空间分辨率高,但无法显示地物色彩。实际操作中,我们经常将之与波段影象融合处理,得到既有全色影象的高分辨率,又有多波段影象的彩色信息的影象。 全色波段,一般指使用0.5微米到0.75微米左右的单波段,即从绿色往后的可见光波段。全色遥感影象也就是对地物辐射中全色波段的影象摄取,因为是单波段,在图上显示是灰度图片。全色遥感影象一般空间分辨率高,但无法显示地物色彩。 多光谱遥感 多光谱遥感:将地物辐射电磁破分割成若干个较窄的光谱段,以摄影或扫描的方式,在同一时间获得同一目标不同波段信息的遥感技术。 原理:不同地物有不同的光谱特性,同一地物则具有相同的光谱特性。不同地物在不同波段的辐射能量有差别,取得的不同波段图像上有差别。 优点:多光谱遥感不仅可以根据影像的形态和结构的差异判别地物,还可以根据光谱特性的差异判别地物,扩大了遥感的信息量。 航空摄影用的多光谱摄影与陆地卫星所用的多光谱扫描均能得到不同普段的遥感资料,分普段的图像或数据可以通过摄影彩色合成或计算机图像处理,获得比常规方法更为丰富的图像,也为地物影像计算机识别与分类提供了可能。 高光谱 高光谱遥感起源于20世纪70年代初的多光谱遥感,它将成像技术与光谱技术结合在一起,在对目标的空间特征成像的同时,对每个空间像元经过色散形成几十乃至几百个窄波段以进行连续的光谱覆盖,这样形成的遥感数据可以用“图像立方体”来形象的描述。同传统遥感技术相比,其所获取的图像包含丰富的空间、辐射和光谱三重信息。 高光谱遥感技术已经成为当前遥感领域的前沿技术。 高光谱遥感具有不同于传统遥感的新特点: 1)波段多:可以为每个像元提供十几、数百甚至上千个波段; 2)光谱范围窄:波段范围一般小于10nm; 3)波段连续:有些传感器可以在350~2500nm的太阳光谱范围内提供几乎连续的地物光谱; 4)数据量大:随着波段数的增加,数据量成指数增加; 5)信息冗余增加:由于相邻波段高度相关,冗余信息也相对增加。 优点: 1)有利于利用光谱特征分析来研究地物; 2)有利于采用各种光谱匹配模型; 3)有利于地物的精细分类与识别; 异同点 国际遥感界的共识是光谱分辨率在λ/10数量级范围的称为多光谱(Multispectral),这样的遥感器在可见光和近红外光谱区只有几个波段,如美国LandsatMSS,TM,法国的SPOT等;而光谱分辨率在λ/100的遥感信息称之为高光谱遥感(HyPerspectral);随着遥感光谱分辨率的进一步提高,在达到λ/1000时,遥感即进入超高光谱(ultraspectral)阶段(陈述彭等,1998)。 高光谱和多光谱实质上的差别就是:高光谱的波段较多,普带较窄。(Hyperion有233~309个波段,MODIS有36个波段) 多光谱相对波段较少。(如ETM+,8个波段,分为红波段,绿波段,蓝波段,可见光,热红外(2个),近红外和全色波段) 高光谱遥感就是多比多光谱遥感的光谱分辨率更高,但光谱分辨率高的同时空间分辨率会降低。 二○一一届毕业设计 面向对象的高分辨率遥感影像分类Object-oriented Classification of high Resolution Remote Sensing images 学院:地质工程与测绘学院 专业:遥感科学与技术 姓名: 学号: 指导教师: 完成时间:2011年6月17日 二〇一一年七月 摘要 高空间分辨率遥感影像使得在较小的空间尺度上观察地表细节变化,进行大比例尺遥感制图,以及监测人为活动对环境的影响成为可能。随着高分辨率影像的应用越来越普及,迫切要求人们对高分辨率遥感信息提取进行研究,以满足高分辨率影像信息不断增长的应用和研究需要 高分辨率遥感影像光谱信息有限,空间信息丰富,地物的尺寸、形状及相邻地物间的关系都得到很好的反映。面向对象的分类方法与传统的基于像素的分类相比,不仅仅是依靠光谱信息,而且还充分利用影像的空间信息,分类时也克服了基于像元的逐点分类无法对相同语义特征的像素集合进行识别的缺点,是一种目前最适合于高分辨率遥感影像的分类方法。 本文采用面向对象的分类方法对高分辨率影像进行分类,该方法首先对影像进行多尺度分割获得同质区域对象,在此基础上利用模糊分类思想对分割后的对象进行分类。该方法不仅充分利用了高分辨率影像的空间信息,还将基于像素的分类提升到了基于对象的分类。 多尺度分割采用的是区域生长合并算法,通过对尺度阈值、光谱因子及形状因子等参数的控制,可以获得不同尺度下有意义的对象。分割后的对象不仅包含了原始的光谱信息,还可以提供大量辅助特征,如纹理、形状、拓扑等特征。综合利用这些特征以及模糊分类的思想,使得高分辨率影像分类在减少分类不确定性的同时,还提高了分类的精度。 最后将面向对象分类结果与传统的基于像素分类结果进行对比分析,发现其分类精度要明显高于传统法,且具有较强的抗噪声的功能,分类所得的地物结果相对较为完整,具有更丰富的语义信息,更加符合客观现实情形。 关键词:高分辨率遥感影像,面向对象的分类,影像分割,多尺度,最近邻分类 几种典型高分辨率商业遥感卫星系统 1.2.1 IKONOS卫星系统 1.基本情况 IKONOS是空间成像公司(Space Imaging)为满足高解析度和高精度空间信息获取而设计制造,是全球首颗高分辨率商业遥感卫星。IKONOS-1于1999年4月27日发射失败,同年9月24日,IKONOS-2发射成功,紧接着于10月12日成功接收到第一幅影像。 IKONOS卫星由洛克希德—马丁公司(Lockheed Martin)制造,重1600lb,由Athena II 火箭于加利福尼亚州的范登堡空军基地发射成功,卫星设计寿命为7年。它采用太阳同步轨道,轨道倾角98.1o,平均飞行高度681km,轨道周期98.3min,通过赤道的当地时间为上午10:30,在地面上空平均飞行速度为6.79km/s,卫星平台自身高1.8m,直径1.6m。 IKONOS卫星的传感器系统由美国伊斯曼—柯达公司(Eastman Kodak)研制,包括一个1m分辨率的全色传感器和一个4m分辨率的多光谱传感器,其中的全色传感器由13816个CCD单元以线阵列排成,CCD单元的物理尺寸为12μm x 12μm,多光谱传感器分四个波段,每个波段由3454个CCD单元组成。传感器光学系统的等效焦距为10m,视场角(FOV)为0.931o,因此当卫星在681km的高度飞行时,其星下点的地面分辨率在全色波段最高可达0.82m,多光谱可达3.28m,扫描宽度约为11km。传感器可倾斜至26o立体成像,平均地面分辨率1m左右,此时扫描宽度约为13km。IKONOS的多光谱波段与Landsat TM的1—4波段大体相同,并且全部波段都具有11位的动态范围,从而使其影像包含更加丰富的信息。 IKONOS卫星载有高性能的GPS接收机、恒星跟踪仪和激光陀螺。GPS数据经过后处理可提供较精确的星历信息;恒星跟踪仪用以高精度确定卫星的姿态,其采样频率低;激光陀螺则可高频地测量成像期间卫星的姿态变化,短期内有很高的精度。恒星跟踪数据与激光陀螺数据通过卡尔曼滤波能提供成像期间卫星较精确的姿态信息。GPS接收机、恒星跟踪仪和激光陀螺提供的较高精度的轨道星历和姿态信息,保证了在没有地面控制的情况下,IKONOS卫星影像也能达到较高的地理定位精度。 2.成像原理 与Landsat和SPOT-4卫星相比,IKONOS卫星的成像方式更加灵活,其传感器系统采用独特的机械设计,可以十分灵活地以任意方位角成像,偏离正底点的摆动角甚至可达到60o。IKONOS卫星360o的照准能力使其既可侧摆成像以获取异轨立体或缩短重访周期,也可通过沿轨道方向的前后摆动同轨立体成像,具有推扫、横扫成像能力。 IKONOS卫星能获取同轨立体影像。当卫星接近目标时,传感器光学系统先沿着轨道向前倾斜,照准目标区域并采集第一幅影像,接着控制系统操纵传感器向后摆动,大约100s 后再次照准目标区并采集第二幅影像,如图1.1所示。由于IKONOS卫星利用单线阵CCD 传感器,通过光学系统的前后摆动实现同轨立体成像。因此,相应的立体覆盖是不连续的。 遥感图像分类方法的研究现状与发展趋势 摘要:遥感在中国已经取得了世界级的成果和发展,被广泛应用于国民经济发展的各个方面,如土地资源调查和管理、农作物估产、地质勘查、海洋环境监测、灾害监测、全球变化研究等,形成了适合中国国情的技术发展和应用推广模式。随着遥感数据获取手段的加强,需要处理的遥感信息量急剧增加。在这种情况下,如何满足应用人员对于大区域遥感资料进行快速处理与分析的要求,正成为遥感信息处理面临的一大难题。这里涉及二个方面,一是遥感图像处理本身技术的开发,二是遥感与地理信息系统的结合,归结起来,最迫切需要解决的问题是如何提高遥感图像分类精度,这是解决大区域资源环境遥感快速调查与制图的关键。 关键词:遥感图像、发展、分类、计算机 一、遥感技术的发展现状 遥感技术正在进入一个能够快速准确地提供多种对地观测海量数据及应用研究的新阶段,它在近一二十年内得到了飞速发展,目前又将达到一个新的高潮。这种发展主要表现在以下4个方面: 1. 多分辨率多遥感平台并存。空间分辨率、时间分辨率及光谱分辨率普遍提高目前,国际上已拥有十几种不同用途的地球观测卫星系统,并拥有全色0.8~5m、多光谱3.3~30m的多种空间分辨率。遥感平台和传感器已从过去的单一型向多样化发展,并能在不同平台 上获得不同空间分辨率、时间分辨率和光谱分辨率的遥感影像。民用遥感影像的空间分辨率达到米级,光谱分辨率达到纳米级,波段数已增加到数十甚至数百个,重复周期达到几天甚至十几个小时。例如,美国的商业卫星ORBVIEW可获取lm空间分辨率的图像,通过任意方向旋转可获得同轨和异轨的高分辨率立体图像;美国EOS卫星上的MOiDIS-N传感器具有35个波段;美国NOAA的一颗卫星每天可对地面同一地区进行两次观测。随着遥感应用领域对高分辨率遥感数据需求的增加及高新技术自身不断的发展,各类遥感分辨率的提高成为普遍发展趋势。 2. 微波遥感、高光谱遥感迅速发展微波遥感技术是近十几年发展起来的具有良好应用前景的主动式探测方法。微波具有穿透性强、不受天气影响的特性,可全天时、全天候工作。微波遥感采用多极化、多波段及多工作模式,形成多级分辨率影像序列,以提供从粗到细的对地观测数据源。成像雷达、激光雷达等的发展,越来越引起人们的关注。例如,美国实施的航天飞机雷达地形测绘计划即采用雷达干涉测量技术,在一架航天飞机上安装了两个雷达天线,对同一地区一次获取两幅图像,然后通过影像精匹配、相位差解算、高程计算等步骤得到被观测地区的高程数据。高光谱遥感的出现和发展是遥感技术的一场革命。它使本来在宽波段遥感中不可探测的物质,在高光谱遥感中能被探测。高光谱遥感的发展,从研制第一代航空成像光谱仪算起已有二十多年的历史,并受到世界各国遥感科学家的普遍关注。但长期以来,高光谱遥感一直处在以航空为基础的研究发展阶段,且主要 卫星影像图与飞机航拍图的区别 一、卫星影像图与飞机航拍图区别 (一)定义 1、卫星影像图:卫星影像图是以卫星作为遥感平台,通过卫星上装载的对地观测遥感仪器对地球表面进行观测所获得的遥感图像。 2、飞机航拍图:飞机航拍图是以飞机作为遥感平台,在近地点的稳定高度拍摄地面各种目标所获得的图像。 (二)成图原理、方式 1、卫星影像图:以卫星为航天遥感平台(一般大于80km),以扫描方式获取图像,有很多波段,最大可达350多个以上,彩色图像基本上都是波段组合和融合而成,色彩不太真实。 2、飞机航拍图:以飞机为航空遥感平台(小于80km),以光学摄影进行的遥感,一般是黑白,真彩和彩红外摄影,一般最多4个波段,颜色比较真实。 (三)分辨率 1、卫星影像图:比例尺小,分辨率低,清晰度相对较低,一般分辨率可从0.5米—1000米之间; 2、飞机航拍图:比例尺较大,分辨率较高,清晰度高,一般分辨率可从0.04米—1米之间。 (四)图像变形 1、卫星影像图:摄影高度较高,因此建筑的投影差方向和大小基本上都一样,变形小。 2、飞机航拍图:摄影高度较低,因此建筑的投影差方向和大小每个地方都不一样,变形大。 (五)成图面积 1、卫星影像图:成图面积大,含信息丰富,拍摄面域广,获取速度快,可做全球动态监测。 2、飞机航拍图:成图面积小,离地面距离相对要近得多, 观察格外清晰、准确, 图像稳定, 精度高,避免了常规调查的盲目性和不必要的无效工作, 极大的节约了时间和精力, 节约了财力和物力。 (六)图像用途 1、卫星影像图:国土,规划,水利等大型工程。 2、飞机航拍图:小面积测绘,应急、抗灾。 (七)优点 1、卫星影像图: 第53卷第4期华中师范大学学报(自然科学版) Vol.53No.4 2019年8月JOURNAL OF CENTRAL CHINA NORMAL UNIVERSITY(Nat.Sci.)Aug .2019收稿日期:2019-03- 04.基金项目:十三五科技部国家重点研发计划项目(2016YFC0803107,2016YFB052601,2017YFB0504103). *通讯联系人.E-mail:duanxuelin@w hu.edu.cn.DOI:10.19603/j.cnki.1000-1190.2019.04.017文章编号:1000-1190(2019)04-0568- 07基于DCNN的高分辨率遥感影像场景分类孟庆祥,段学琳 (武汉大学遥感信息工程学院,武汉430000 )摘 要:针对传统场景分类方法不能准确地表达高分辨率遥感影像丰富的语义信息问题,提出了一种基于卷积神经网络的高分辨率影像场景分类方法.此方法大致分为3步:第1步,依据不同卷积窗口做卷积运算提取颜色, 纹理和形状等低阶特征;第2步,利用池化层将这些低阶特征进行过滤,得到重要特征;第3步,重组提取出来的特征以形成高阶语义特征进行场景分类.在具体实验中利用三个不同尺寸的卷积核对数据集进行分类探究,并且使用了数据增广、正则化和Dropout等手段,提升模型对新样本的适应能力,很好地解决了过拟合问题.该方法在所进行的实验中表现良好,在WHU-RS19数据集上取得了88.47%的准确率,和传统的场景分类方法相比,显著提升了分类精度. 关键词:高分辨率遥感影像;场景分类;深度学习;深度卷积神经网络中图分类号:P237 文献标识码:A 遥感技术的不断发展, 带来了影像分辨率的提升.这种高空间分辨率的遥感影像具有丰富的空间信息和纹理特征,包含了大量的语义信息.然而面向像素和面向对象的解译方法存在着很多不足,无法满足遥感影像高层次内容解译的需求.因此,对高分辨率遥感图像进行场景分类成为了当前遥感 图像解译中活跃的研究课题[1]. 场景分类是遥感研究领域的热点.通俗的来说,就是用给定的图像,通过其包含的内容对它的场景类别进行判断.传统的场景分类方法可以概括为两类:基于低层次特征的方法和基于中层语义 特征建模的方法[2] . 基于低层特征的场景分类,即依赖于颜色、纹理和形状等低层特征的分类方法,此类分类算法比较简单,但泛化能力较弱、精度不 够高[3-4]. 基于中间语义的图像分类,即先生成底层特征, 然后结合分类器实现图像场景分类,其代表有视觉词袋(BoVW)[5]以及由此衍生的空间金字塔匹配核(SPMK) [6]等,此类方法会导致信息的丢失,存在一定的局限性. 由于传统的场景分类方法无法满足大数据环 境下人们的分类要求,学者们开始将深度学习[7-8]算法应用到影像分类中.典型的深度网络模型[9]主要有深度置信网(DBN)[10] 、栈式自动编码器网络(SAE)[11]和卷积神经网络(CNN)[12- 13]. 其中,卷积神经网络是目前较为流行的基于监督的深度学习方法, 该方法在图像识别、物体识别、图像语义分割中都得到了广泛的应用.近年来,越来越多的学者将卷积神经网络运用于图像分类.文献[14]将卷积神经网络用于图像分类,在CIFAR-10数据集上取得了较好的分类效果.文献[15]用卷积神经网络对Landsat TM5中等分辨率遥感影像进行了分类实验,并与支持向量机分类结果进行比较,在一定程度上体现了卷积神经网络在图像分类的优越性.与此同时,有学者将卷积神经网络运用于遥感影像的场景分类,并取得了一定的进展,这种场景分类方法很快受到了广泛的关注. 在此基础上,本文提出一种基于深度卷积神经网络的场景分类模型DCNN,将该模型用于高分辨率遥感影像的场景分类,加入数据增广并且利用正则化方法和丢弃函数调整模型参数,最终实现基于卷积神经网络的高分辨率遥感影像分类. 1卷积神经网络 卷积神经网络是一种受生物学启示的,包含卷积计算且具有深度结构的前馈神经网络.它可以进行监督分类,提取出遥感影像中的语义特征.一个 基本的卷积神经网络结构有3层[16- 17]:输入层-隐 含层-输出层, 隐含层又分为4部分———卷积层、 北京揽宇方圆信息技术有限公司 高分辨率卫星影像报价 单片产品单位:元/平方公里产品类型存档S级编程/90天内编程S+级编程 Worldview-3 0.3米真彩色 330550640 0.3米全色+4个多光谱 Worldview-30.3米全色+8个多光谱420690800 Geoeye Worldview-2 Wordview-3 0.4米真彩色 220244360 0.4米全色+4个多光谱 Worldview-2 Worldview-3 0.4米全色+8个多光谱330380430 Geoeye Worldview-2 Wordview-3 0.5米真彩色 195220330 0.5米全色+4个多光谱 Worldview-2 Worldview-3 0.5米全色+8个多光谱310340400 Worldview-10.5米全色146179280 Quickbird(快鸟) 0.6米真彩色 195220330 0.6米全色+4个多光谱 ikonos 0.8米真彩色 130190300 0.8米全色+4个多光谱 pleiades 0.5米真彩色 195195220 0.5米全色+4个多光谱 rapideye5米多光谱121215资源三号 2.1米全+5.8米多光谱4000 高分一号2米全色+8米多光谱4000 高分二号0.8米全色+3.2米多光谱20000 锁眼卫星全色6000 默认的数据产品级别是:没有经过地形校正的产品,只经过了辐射校正、传感器和卫星平台引起的误差校正,具有地图投影。用户可以直接通过相关专业软件结合自己的DEM、RPC参考模型、亚米级精度的地面控制点来做正射校正。 立体产品单位:元/平方公里产品类型存档S级编程/90天内编程S+级编程全色340440840 4波段5406401152 8波段8909901511 IKONOS4105101020 Pleiades-1540640840 立体相对100平方公里起订 北京揽宇方圆信息技术有限公司 北京揽宇方圆信息技术有限公司 表1:商业光学高分辨率卫星参数一览表 北京揽宇方圆信息技术有限公司是国内的领先遥感卫星数据机构,而且是整合全球的遥感卫星数据资源,分发不同性能、技术应用上可以互补的多种卫星影像,包括光学、雷达卫星影像、历史遥感影像等各种卫星数据服务,各种专业应用目的的图像处理、解译、顾问服务以及基于卫星影像的各种解决方案等。遥感卫星影像数据贯穿中国1960年至今的所有卫星影像数据,是中国遥感卫星数据资源最多的专业遥感卫星数据服务机构,提供多尺度、多分辨率、全覆盖的遥感卫星影像数据服务,最大限度的保证了遥感影像数据获取的及时性和完整性。 优势: 1:北京揽宇方圆国内老牌卫星数据公司,经营时间久,行业口碑相传,1800个行业用户选择的实力见证。 2:北京揽宇方圆遥感数据购买专人数据查询一对一服务,数据查询网址是卫星公司网。 3:北京揽宇方圆拥有大型正版遥感处理软件,遥感数据处理工程师有10年以上遥感处理工作经验,并有国家大型项目工作经验自主卫星数据处理软件著作权,最大限度保持遥感卫星影像处理的真实度。 4:北京揽宇方圆国家高新技术企业,通过ISO900认证的国际质量管理操作体系,无论是遥感卫星品质和遥感数据处理质量,都能得到保障。 5:影像数据官方渠道:所有的卫星数据都是卫星公司授权的原始数据,全球公众数据查询网址公开查询,影像数据质量一目了然,数据反应客观公正实事求是,数据处理技术团队国标规范操作,提供的是行业优质的专业化服务。 6:签定正规合同:影像数据服务付款前,买卖双方须签订服务合同,提供合同相应的正规发票,发票国家税网可以详细查询,有增值税普通发票和增值税专用发票两种发票类型可供选择。以最有效的法律手段来保障您的权益。 7:对公帐号转款:合同约定的对公帐号,与合同主体名发票上面的帐号名称一致,是由工商行政管理部门核准的公司银行账户,所有交易记录均能查询,保障资金安全。 8:售后服务:完善的售后服务体制,全国热线,登陆官网客服服务同步。 技术能力说明 北京揽宇方圆拥有大型正版遥感处理软件,遥感数据处理工程师有10年以上遥感处理工作经验,并有国家大型项目工作经验自主卫星数据处理软件著作权,最大限度保持遥感卫星影像处理的真实度。 国外遥感卫星影像发展现状 1.1法国SPOT卫星系统 法国SPOT卫星系统历经3代发展,目前在轨为SPOT-4和SPOT-5。 SPOT4于1998年3月发射,它增加了一个短波红外波段(1.58-1.75um);把原0.61-0.68um的红波段改为0.49-0.73um包含“红”的波段,并替代原全色波段,可以产生分辨率10m的黑白图像和分辨率20m的多光谱数据;增加了一个多角度遥感仪器,即宽视域植被探测仪Vegetation(VGT),用于全球和区域两个层次上,对自然植被和农作物进行连续监测,对大范围的环境变化、气象、海洋等应用研究很有意义。VGT被设计为垂直方向的空间分辨率1.15km,扫描宽度2250km,可见光一短波红外波段0.43-1.75um 共5个波段。它们为蓝波段0.43-0.47um、绿波段0.50-0.59um、红波段0.61-0.68um,近红外波段0.79-0.89um、短波红外波段1.58-1.75um。SPOT4中的VGT和HRVs将使同一区域有可能同时获得较大范围的粗分辨率数据和小范围的细分辨率数据。 SPOT5于2002年5月4日发射,星上载有2台高分辨率几何成像装置(HRG)、1台高分辨率立体成像装置(HRS)、1台宽视域植被探测仪(VGT)等,空间分辨率最高可达2.5m,前后模式实时获得立体像对,运营性能有很大改善,在数据压缩、存储和传输等方面也均有显著提高。 表3-1SPOT系列卫星参数对比 目前法国正在研制部署SPOT系列卫星后续任务,保持数据连续性,巩固光学卫星在欧洲的领先地位,第4代SPOT卫星SPOT-6和SPOT-7卫星,分别计划于2012年和2014年发射,寿命预期为十年。 SPOT6和SPOT7结构类似于Pleiades卫星,轨道高度也为694公里,两星位于同一轨道面,相位差为180度,降交点地方时为10:00,具备±30°侧摆能力。卫星全色影像分辨率1.5m,多光谱影像分辨率6m,成像幅宽60km。 1.1法国Pleiades卫星系统 “昴宿星”卫星(Pleiades)是法国在SPOT之后研制部署的又一型号高分辨率卫星。“昴宿星”(Pleiades)星群由Pleiades-1和Pleiades-2组成,Pleiades-1卫星已于2011年12月发射,业已投入运营。 Pleiades是一种便捷、灵巧的高分辨率光学遥感卫星。为了适应对地观测的发展的需要,Pleiades对卫星进行全新的设计,对传感器也进行了较大的调整,一方面继续保持了SPOT系列卫星在波段设置、立体成像、星座运行等方面的特点,另一方面在空间分辨率、观测灵活性以及数据获取模式等方面进行重新设计,使Pleiades卫星成为未来5年内具有较高技术水准和较强竞争力的对地观测遥感卫星。 在卫星的下行数据通道设置方面,Pleiades卫星有3个X波段的下行数据通道,每个通道的传输率为150Mbps,总传输速率为450Mbps。同时,扩大了星上记录仪的容量,达到750Gb,是SP0T-5卫星星上存储容量的8倍,能够保存约250景图像数据。高分辨率遥感卫星介绍
高分辨率遥感影像分类实验报告
遥感图像分类方法的国内外研究现状与发展趋势
高分辨率遥感影像数据一体化测图系统PixelGrid
全色卫星影像 多光谱卫星影像 高光谱卫星影像
面向对象的高分辨率遥感影像分类
几种典型高分辨率商业遥感卫星系统
遥感图像分类方法的国内外研究现状与发展趋势
卫星影像与航拍的区别
基于DCNN的高分辨率遥感影像场景分类
高分辨率卫星影像报价
高分辨率卫星影像卫星参数表
国外遥感卫星影像发展现状