文献翻译

IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 23, NO. 4, JULY 2008
2027
Nonlinear State of Charge Estimator for Hybrid Electric Vehicle Battery
Il-Song Kim, Member, IEEE
Abstract—A new method for battery state of charge estimation using a sliding mode observer has been developed. A nonlinear battery dynamic modeling technique is established and design methodology with the sliding mode observer is presented. Contrary to the conventional methods using complicated battery modeling, a simple resistor-capacitor battery model was used in this work. The modeling errors caused by the simple model are compensated by the sliding mode observer. The structure of the sliding mode observer is simple, but it shows robust control property against modeling errors and uncertainties. The convergence of the proposed observer has been proved by the equivalent control method. The performance of the system has been veri?ed by the sequence of urban dynamometer driving schedule test. The test results of the proposed observer system shows robust tracking performance under real driving environments. Index Terms—Battery modeling, hybrid electric vehicle, slidingmode observer, state of charge (SOC), state of charge estimation.
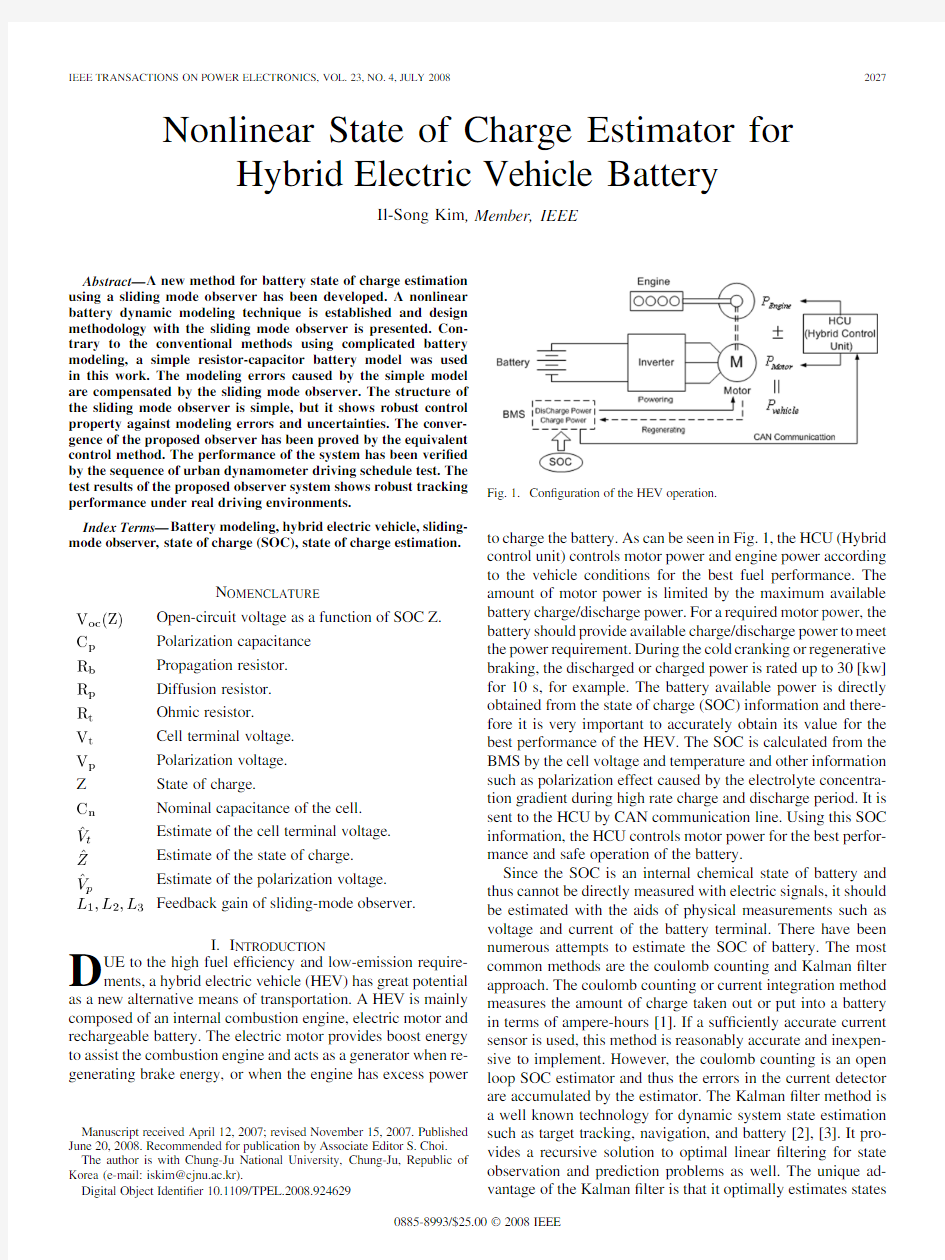
Fig. 1. Con?guration of the HEV operation.
NOMENCLATURE Open-circuit voltage as a function of SOC Z. Polarization capacitance Propagation resistor. Diffusion resistor. Ohmic resistor. Cell terminal voltage. Z Polarization voltage. State of charge. Nominal capacitance of the cell. Estimate of the cell terminal voltage. Estimate of the state of charge. Estimate of the polarization voltage. Feedback gain of sliding-mode observer.
D
I. INTRODUCTION UE to the high fuel ef?ciency and low-emission requirements, a hybrid electric vehicle (HEV) has great potential as a new alternative means of transportation. A HEV is mainly composed of an internal combustion engine, electric motor and rechargeable battery. The electric motor provides boost energy to assist the combustion engine and acts as a generator when regenerating brake energy, or when the engine has excess power
Manuscript received April 12, 2007; revised November 15, 2007. Published June 20, 2008. Recommended for publication by Associate Editor S. Choi. The author is with Chung-Ju National University, Chung-Ju, Republic of Korea (e-mail: iskim@cjnu.ac.kr). Digital Object Identi?er 10.1109/TPEL.2008.924629
to charge the battery. As can be seen in Fig. 1, the HCU (Hybrid control unit) controls motor power and engine power according to the vehicle conditions for the best fuel performance. The amount of motor power is limited by the maximum available battery charge/discharge power. For a required motor power, the battery should provide available charge/discharge power to meet the power requirement. During the cold cranking or regenerative braking, the discharged or charged power is rated up to 30 [kw] for 10 s, for example. The battery available power is directly obtained from the state of charge (SOC) information and therefore it is very important to accurately obtain its value for the best performance of the HEV. The SOC is calculated from the BMS by the cell voltage and temperature and other information such as polarization effect caused by the electrolyte concentration gradient during high rate charge and discharge period. It is sent to the HCU by CAN communication line. Using this SOC information, the HCU controls motor power for the best performance and safe operation of the battery. Since the SOC is an internal chemical state of battery and thus cannot be directly measured with electric signals, it should be estimated with the aids of physical measurements such as voltage and current of the battery terminal. There have been numerous attempts to estimate the SOC of battery. The most common methods are the coulomb counting and Kalman ?lter approach. The coulomb counting or current integration method measures the amount of charge taken out or put into a battery in terms of ampere-hours [1]. If a suf?ciently accurate current sensor is used, this method is reasonably accurate and inexpensive to implement. However, the coulomb counting is an open loop SOC estimator and thus the errors in the current detector are accumulated by the estimator. The Kalman ?lter method is a well known technology for dynamic system state estimation such as target tracking, navigation, and battery [2], [3]. It provides a recursive solution to optimal linear ?ltering for state observation and prediction problems as well. The unique advantage of the Kalman ?lter is that it optimally estimates states
0885-8993/$25.00 ? 2008 IEEE
2028
IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 23, NO. 4, JULY 2008
Fig. 3. Battery dynamic model structure. Fig. 2. Open-circuit voltage versus SOC over temperature variation of the lithium-polymer battery.
affected by broadband noise contained within the system bandwidth. The main disadvantage of the Kalman ?lter is that it requires high complex mathematical calculation. The gain is obtained by the ?ve steps of the Kalman ?lter algorithm. There can be some possibility of divergence due to imperfect modeling and complex calculation loads. If the processors are not mighty enough, the calculation time could excess the sampling time and thus it can not track the correct state values. Also the Kalman ?lter has some limitations for a real implementation such as perfect modeling of the plant and Gaussian distribution of the external noises. If these constraints are not satis?ed, the performance of the Kalman ?lter would be degraded and thus cannot be used in the real applications [4]. Other reported methods for estimating the SOC have been based on arti?cial neural networks and fuzzy logic principles [5], [6]. The neural network method incurs large computation overload on the BMS, it can be a problem for online implementation. Since the fuzzy logic method relies on the training data battery is operated in unusual way. The empirical method based on the battery chemical characteristics is also reported in recently [7]. In this paper, a new design method with a sliding-mode observer has been presented for the battery SOC estimation. The sliding-mode observer can overcome aforementioned drawbacks by using sliding-mode techniques. The main characteristics of the sliding-mode observer are simple control structure and robust tracking performance under uncertain environments [8], [9]. II. BATTERY MODELING Dynamic state model of the battery is necessary to develop a simulation model for the emulation of battery behavior [10]–[15]. The model is developed from experimental cell data, where open circuit voltage (OCV) tests are performed on successive discharge of the battery, by the application of periodic current discharge. As for the temperature variation to , the OCV of a lithium-polymer battery from (LI-PB) varies nonlinearly over the battery SOC as can be seen in Fig. 2. Therefore, the nonlinear RC models are developed to model nonlinear OCV characteristics of the Li-PB [16], [17].
The proposed model consists of: 1) nonlinear voltage source as a function of SOC Z to represent nonlinear characto model polarization teristics of the OCV; 2) a capacitance to model propagation resiseffect; 3) a propagation resistor as a function of current I; and tance; 4) a diffusion resistor and terminal voltage as shown in 5) an ohmic resistance Fig. 3. The self-discharge resistor does not considered in the model because the self-discharge characteristic of the lithium battery is extremely low compared to other batteries such as nickel cadium, lead-acid, nickel metal hydride type. is denoted as . The The voltage across the capacitance terminal voltage equation is given as (1) (2) where is the instantaneous current (positive for charging, negative for discharging). The SOC is de?ned as a ratio of the remaining capacity to the nominal capacity of the cell, where the remaining capacity is the number of ampere-hours that can be drawn from the cell at room temperature with the C/30 rate before it is fully discharged [3]. Based on this de?nition, the mathematical relation on the SOC is developed as (3) is SOC and is the nominal capacitance of the where cell which is de?ned as the number of ampere-hours that can be drawn from the cell at room temperature at the C/30 rate, starting with the cell fully charged [3]. The time derivative for SOC Z can be expressed as follows: (4) Equating the two voltage equations (1) and (2) with some algebraic manipulation yields (5) From Kirchhoff’s law, it results in (6)
KIM: NONLINEAR STATE OF CHARGE ESTIMATOR FOR HEV BATTERY
2029
Then, from (5) and (6), obtain (7) Equating (7) to (4) results in (8) Also, by similar way, substituting (7) into (6), we have (9) The output voltage equation is given from (2) and (7) by
where
This model is not accurate compared with the real cell data. Therefore, the nonlinear unknown disturbances terms are added to the model in order to compensate for the modeling errors (10)
The output voltage is expressed as a nonlinear equation of Z and therefore can be considered as the third state variable. The rate of change of input current can be negligible due to the fast sampling interval when implemented into digital system. Taking the time derivative of the output voltage and assuming gives
(14) not only represent nonlinearities caused where by linearization error and modeling error, but also time-varying terms and internal/external disturbances. III. THEORETICAL BACKGROUND OF THE SLIDING-MODE OBSERVER Consider the observer problem for a continuous-time single and measurement input system , where , is the scalar model represents bounded modeling errors and feedback control, disturbances, and [18]. When an observer for the system is de?ned as (15) where with , is an estimate of , is the signum function, and represent vectors has dynamics of switching gains. The observer error , where , . and the switching function is de?ned as A local sliding regime exists on the surface whenever (16) where is the ?rst column of switching gain . , a local sliding regime exists on Therefore if for . The set is sometimes referred to as the sliding patch. The ideal sliding
(11) The above equation is based on the assumption that the OCV can be considered as a piecewise linear function of the Z and therefore the following relationship is obtained for the piecewise region: (12) From (2) and (7), solving for and then substituting into (10), then the complete state equation including the derivative of the output voltage is obtained as
(13)
2030
IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 23, NO. 4, JULY 2008
dynamics are determined by Filippov’s solution concept: for ,
Z,
As OCV is monotonically increasing with respect to the SOC can be considered as piecewise linear to the . Therefore (23) The error system for is given as (24)
(17) represents a projection onto the null space of C along where span {L}. The sliding-mode observer shows robust tracking property by the sliding regime. The robustness of sliding-mode observer is to maintain sliding regime in the presence of dynamical disturbances, and to retain robustness properties of the sliding mode. IV. SLIDING-MODE OBSERVER DESIGN Since the observability matrix of (13) has always full rank, the internal state of the battery can be estimated by the observer. The sliding-mode observer design starts from the output equation [19]–[24]. The corresponding sliding-mode observer for the is given by output (18) are the estimates for , and is a constant where positive feedback gain. When de?ning the error with , the following error equation is obtained:
where is a piecewise linear gain and the maximum value is determined from the experimental result. . Select Choose Lyapunov candidate function , the sign of and is opposite. Therefore , as in the previous case, and for all subsequent time. Then the following relationship is obtained as
(25) Finally, the observer for is built as (26) The error system is given as (27)
(19) where . The convergence of error equation can be proved by the Lyapunov candidate function by choosing . , then the sign of is negative if is Select positive regardless of is. The sign of is positive if is negative. Therefore , and after and for all subsequent time. some ?nite time, According to the equivalent control method, the error system is replaced by its equivin sliding mode behaves as if , which can be calculated from (19) alent value and . Once the sliding surface is assuming and reached, then from the equivalent control concept, reduced to zero and the uncertainties vanish, and then the resulting equation from (19) can be written as follows: (20) The next observer equation for is obtained as (21) are the estimates for , and is a constant where positive feedback gain. De?ne error as and , then the following error equation is obtained as
As in the previous case, select , then the error goes to zero if is larger than the uncertainties. The resultant observer equations are given as
(28) The range of feedback gain should be
(29) The boundaries of the uncertainties can be determined by comparing the cell test data with modeling parameters. The sliding-mode observer switching gain can be arbitrarily assigned to attain robustness against disturbances. However, the restriction on the assignment of the switching gain comes from the condition that the observer is stable. The practical system is implemented with a digital system which has a ?nite sampling time and gives rise to the chattering phenomena. The magnitude of chattering is highly dependent on the observer
(22)
KIM: NONLINEAR STATE OF CHARGE ESTIMATOR FOR HEV BATTERY
2031
Fig. 5. Block diagram of the proposed observer operation.
Fig. 4. Picture of the test Li-PB.
as voltage recovery time and resultant value is 1.2 s. Then by circuit analysis, (32) The modeling parameters are calculated using circuit values
gain. If the gain is remarkably big, a large amount of ripples may result, causing estimation errors. Therefore, a tradeoff should be made between the robustness and stability of the observer [18]. The design methodology for sliding-mode observer can be summarized as follows. First, build the battery model by state equation including output state. Second, decompose state variable equations into corresponding observer equations. Third, design the feedback switching gain so as to guarantee the sliding-mode regime by equivalent control method. V. EXPERIMENTAL RESULT The cell comprises of a cathode, an arti?cial graphite anode and is designed for high power application. The nominal capacity and voltage is 5.0 Ah and 3.8 V, respectively. The picture of the test LI-PB is shown in Fig. 4. The dimension in mm and the weight of the cell of the cell is is 120 g. The RC model parameters are obtained from the circuit analysis methods. The nominal capacitance is determined by analyzing the amount of stored energy using the following expression:
(30) by the The internal resistance of the cell is measured to be 4 DC-IR test which performs 1-C discharge for 10 s and calculates . It is generally the ratio of voltage and current change corresponds to the 25% of the total internal assumed that resistance [2] (31) and . The is set to be Therefore the same as . The polarization capacitance is based on high frequency excitation test which involves 10-C pulsed discharge for 500-ms intervals to determine the time constant given by the and its associated resistance. The time constant is de?ned
The test was performed using the cell model parameters. The con?guration of experimental setup is shown in Fig. 5. The thermal chamber and the Nittetsu cycler were used as chargedischarge equipments for temperature regulations. Nittetsu cycler has 0 5 V and 0 120 A of voltage and current measurement range, respectively. The cycler’s voltage measurement accuracy is 5 mV and its current measurement accuracy is 200 mA. It also has precision ampere-hour counter for direct SOC calculation. True SOC was directly obtained from this amperehour counter. The test was performed with fully charged condition to set the SOC to one. As the test proceeds, the true SOC was calculated by the ampere-hour counter. The controller has been built with In?neon 16-bit microprocessor XC167-40 [Mhz]. It has been used for automotive parts such as engine control unit, transmission control unit, air bag, and so on. It contains internal A/D converter for 10-bit and other peripherals such as PWM and communications. The total control loop takes less than 10 ms including measurement and calculation time of the sliding-mode observer. Two types of cell tests were performed for the proposed observer. The ?rst type of test comprised a sequence of constant current discharges for 180 s and rests for 3600 s. The cell was fully charged up to 4.2 V before the test begins. The discharge current is 5 A and it corresponds to the 1-C rate of the nominal capacity. This amounts to 5% decrease of SOC for each period. The sampled data is collected every second. The purpose of this test is to set the OCV over the entire SOC range and the test result was shown in Fig. 2. The thermal chamber was set to 25 . This data was used to identify parameters of the cell models. The cell model parameters are obtained by the cell test results and the sliding-mode observer equations are established by current cycle of the LI-PB as shown in Fig. 5. The charge-discharge current is simultaneously applied to the LI-PB and sliding-mode observer. The terminal voltage of the LI-PB is measured as the
2032
IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 23, NO. 4, JULY 2008
Fig. 6. Current, voltages for true and model cell, and error.
Fig. 8. Estimated voltage and SOC of the sliding-mode observer.
Fig. 7. Polarization resistance R .
output and fed into the sliding-mode observer to compensate for the errors, and the output of the observer is the estimated SOC. The true SOC is obtained directly from the cycler by precision ampere-hour counter. The result comparing the electrical modeling with the cell’s test data is shown in Fig. 6. It shows the discharge current, true cell voltage, modeling cell voltage and the modeling voltage error. The shapes of the true cell response and the model output are similar in general, although many details of the true cell response are different. This is mainly due to the nonlinear charof the true cell and acteristics of the nominal capacitance also to the fact that the values of resistances are changed by the is a nonlinear resistance which varies on the current. SOC. over current is shown in Fig. 7. The plot of
The observer gains are selected to satisfy the condition in (29). The selected observer gains are , , . The results of SOC estimation using sliding-mode observer are shown in Fig. 8. The estimated model output is controlled with respect to cell terminal voltage with switching ripple, and the estimated SOC follows the true SOC although it has deviation at the start/end of the rest period. This is caused by the discontinuous current and is affected by the abrupt change of . In the discontinuous period, the sliding trajectory is away from the sliding surface by the discontinuous function, but the trajectory tracks into the sliding surface in a short time. The one cycle of Fig. 8 is rendered in Fig. 9. The estimated output voltage tracks cell voltage with chattering ripples. The estimated SOC also tracks true SOC with chattering ripples. The average value of the estimated SOC is close to the true SOC. This result shows that the proposed sliding-mode observer can track SOC accurately even in the presence of errors in the cell modeling. To verify the performance of the proposed observer at the real driving situation, the second test was performed as a sequence of 20 urban dynamometer driving schedule (UDDS) cycles. It is operated by series of charge-discharge pulses and 5-min rests, and spread over the 100%-0% SOC range. It can be seen that the SOC decreases by about 5% during each UDDS cycle. Fig. 10 shows the result of overall UDDS cycle current, true cell and
KIM: NONLINEAR STATE OF CHARGE ESTIMATOR FOR HEV BATTERY
2033
Fig. 9. One-cycle plot of Fig. 7.
Fig. 11. One UDDS test cycle result for model voltage.
Fig. 12. Estimated SOC and error for UDDS cycles.
Fig. 10. UDDS test result of the model voltage and error.
model cell voltage and their voltage error. The modeling error is less than 20 mV for 20 80% of SOC range. For a clear view, one cycle of UDDS for model voltage is shown in Fig. 11. The proposed sliding-mode observer was applied to the overall UDDS cycle. The resultant SOC for whole UDDS cycle is shown in Fig. 12. The estimated SOC and error for the whole UDDS cycles are shown in the ?gure. The SOC error is bounded to 3% in all cases. The trajectory of the estimated SOC and error for the one UDDS cycle are shown in Fig. 13 in order to show clear view of the sliding-mode observer behavior. The trajectories are always con?ned to the true SOC with the chattering value. The magnitude of chattering is dependent on the sampling time. If the high performance microprocessor is used for the controller, the chattering would be
Fig. 13. One-cycle result of the estimated SOC and error.
smaller. This chattering can be smoothed by a saturation function instead of a sign function. In another way, the average value of the estimated SOC can be close to the true SOC. In this way, the suggested sliding-mode observer can be directly applied to the HEV environment with superior performance.
2034
IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 23, NO. 4, JULY 2008
Fig. 14. Tracking performance for an incorrect initial condition.
In order to show the tracking performance of the proposed system for an incorrect initial condition, the test was performed to verify the robustness of proposed system. The true SOC is 0.4 and the true cell voltage is 3.75 V at the starting time. The initial value of sliding-mode observer is set to far away from the true value. The initial value of estimated SOC is 0.8 and the estimated cell voltage is 4.17 V. As can be seen in the Fig. 14, the proposed system converges to the true value about 1 min. The convergence time would be shortened for the higher value of charge-discharge current. However, the current integration method fails to converge to the true value. VI. CONCLUSION A new method for battery modeling has been presented to compensate for the nonlinear Li-PB characteristics. The modeling parameters are extracted by a series of tests. The sliding-mode observer equations are obtained from the battery model and the cell output voltage. The design method of sliding-mode observer has been shown step by step and the convergence of observer has been proved by an equivalent control method. The proposed method shows robust tracking performance under modeling uncertainties and noisy environments compared to the conventional methods. The performances of the proposed system are con?rmed by the UDDS cycle test. SOC error is con?ned to the acceptable level, less than 3% in most cases which is applicable to the real environments. REFERENCES [1] S. Piller, M. Perrin, and A. Jossen, “Methods for state-of-charge determination and their applications,” J. Power Source, vol. 116, pp. 113–129, 2001. [2] B. S. Bhangu, P. Bentley, and C. M. Bingham, “Nonlinear observers for predicting state-of-charge and state-of-health of lead-acid batteries for hybrid-electric vehicle,” IEEE Trans. Veh. Technol., vol. 54, no. 3, pp. 783–794, May 2005. [3] G. L. Plette, “Extended kalman ?ltering for battery management system of LiPB-based HEV battery packs—Part 2. Modeling and identi?cation,” J. Power Source, vol. 134, pp. 262–276, Aug. 2004. [4] S. I. Jang, M. C. Shin, C. D. Yoon, and R. C. Campbell, “A study on adaptive autoreclosure scheme with real-time transient stability,” J. Elect. Eng. & Technol., vol. 1, no. 1, pp. 8–15, 2006. [5] C. C. Chan, E. W. Lo, and S. Weixiang, “The available capacity computation model based on arti?cial neural network for lead acid batteries in electric vehicles,” J. Power Source, vol. 87, pp. 201–204, 2000.
[6] P. Singh, C. Fennie, D. E. Reisner, and A. Salkind, “A fuzzy logic approach to state of charge determination in high performance batteries with applications to electric vehicle,” in Electric Vehicle Symp., Brussels, Belgium, Sep. 30–33, 1998, vol. EVS-15, Proceedings on CD-ROM. [7] P. E. Pascoe and A. H. Anbuky, “VRLA battery discharge reserve time estimation,” IEEE Trans. Power Electron., vol. 19, no. 6, pp. 1515–1522, Nov. 2004. [8] S. H. Huh, S. J. Seo, I. Choy, and G. T. Park, “Design of a robust stable ?ux observer for induction motors,” J. Elect. Eng. & Technol., vol. 2, no. 2, pp. 280–285, 2007. [9] I. Park and S. Kim, “A sliding mode observer design for fuel cell electric vehicles,” J. Power Electron., vol. 6, no. 2, pp. 172–177, Apr. 2006. [10] J. S. Won, R. Langari, and M. Ehsani, “An energy management and charge sustaining strategy for a parallel hybrid vehicle with CVT,” IEEE Trans. Control Syst. Technol., vol. 13, no. 2, pp. 313–320, Mar. 2005. [11] S. Barsali and M. Ceraolo, “Dynamic models of lead-acid batteries: Implementation issues,” IEEE Trans. Energy Convers., vol. 17, no. 1, pp. 16–23, Mar. 2002. [12] B. Schweighofer, K. M. Raab, and G. Brasseur, “Modeling of high power automotive batteries by the use of an automated test system,” IEEE Trans. Instrum. Meas., vol. 52, no. 4, pp. 1087–1091, Aug. 2003. [13] L. Gao, S. Liu, and R. A. Dougal, “Dynamic lithium-ion battery model for system simulation,” IEEE Trans. Compon. Packag. Technol., vol. 25, no. 3, pp. 495–505, Sep. 2002. [14] C. J. Zhan and X. G. Wu et al., “Two electrical models of the lead-acid battery used in a dynamic voltage restorer,” IEE Proc. Gener. Trans. Distrib., vol. 15, no. 2, pp. 175–182, Mar. 2003. [15] S. S. Williamson, S. C. Rimmalapudi, and A. Emadi, “Electrical modeling of renewable energy sources and energy storage devices,” J. Power Electron., vol. 4, no. 2, pp. 117–126, Apr. 2004. [16] H. J. Kim, J. A. Jeon, Y. M. Sung, M. S. Yun, and J. Y. Choi, “Studies of electric double layer capacitors used for a storage battery of dye sensitized solar cell energy,” J. Electr. Eng. Technol., vol. 1, no. 2, pp. 251–256, 2006. [17] J. Chiasson and B. Vairamnhan, “Estimating the state of charge of a battery,” in Proc. Amer. Control Conf., Denver, CO, Jun. 4–6, 2003, pp. 2863–2868. [18] V. C. Aitken, “Towards robust discrete-time sliding mode observers,” in Proc. American Control Conf., Seattle, WA, Jun. 1995, pp. 3730–3734. [19] F. F. M. El-Sousy, “Robust tracking control based on intelligent sliding-mode model-following position controllers for PMSM servo drives,” J. Power Electron., vol. 7, no. 2, pp. 159–173, Apr. 2007. [20] I. Haskara, U. Ozguner, and V. Utkin, “On variable structure observers,” in Proc. IEEE Workshop on Variable Structure System, 2006, pp. 193–198. [21] E. H. E. Bayoumi and M. N. F. Nashed, “A fuzzy predictive sliding mode control for high performance induction motor position drives,” J. Power Electron., vol. 5, no. 1, pp. 20–28, Jan. 2005. [22] Y. Xiong and M. Saif, “Sliding mode observer for uncertain systems—Part I & II,” in Proc. 39th IEEE Conf. Decision and Control, pp. 316–P327. [23] S. R. Nam, J. M. Sohn, S. H. Kang, and J. K. Park, “A method for estimating an instantaneous phasor based on a modi?ed notch ?lter,” J. Elect. Eng. & Technol., vol. 1, no. 3, pp. 279–286, 2006. [24] M. Gokasan, S. Bogosyan, and D. J. Goering, “Sliding mode based power train control for ef?ciency improvement in series hybrid electric vehicles,” IEEE Trans. Power Electron., vol. 21, no. 3, pp. 779–790, May 2006. IL-Song Kim (M’04) was born in Korea in 1968. He received the B.S. degree in electronics engineering from Yonsei University, Seoul, Korea, in 1991, and the M.S. and Ph.D. degrees in electrical engineering from the Korea Advanced Institute of Science and Technology (KAIST), Daejon, in 1994 and 2005, respectively. From 1994 to 1999, he was with the Satellite Business Division of Hyundai Electronics. From 1999 to 2003, he was a Power Team Leader at the KITSAT-4 satellite project in the Satellite Research Center (SATREC), where he designed a solar battery charger and manufactured battery pack. From 2005 to 2007, he joined Battery R&D, LG Chemical, where he was involved in the development of the Battery Management System of Hybrid Electric Vehicles with Hyundai Motors. Since 2007, he has been Assistant Professor at Electrical Engineering at Chung-Ju National University. His research interests include photovoltaic systems, satellite power and system engineering, aerospace electronic equipment, and control systems. Dr. Kim is registered in the Marquis Who’s Who in Science and Engineering and IBC in 2000 outstanding scientists.
文献阅读与翻译(精华版)
Unit 1 general description of literature reading and translation 1.Definition of Literature Literature is a general term for professional writings in the form of books, papers, and other documentations. As an important means for preserving knowledge, literatures have become precious resources or treasures for the mankind, which have greatly contributed to the social progress of the human race. 2.Classification of Literature 1) Textbooks(课本) a kind of professional writing(一种专业的写作) 2) Monographs(专著) various viewpoints and discussions 3) Papers(论文) the theoretical analysis and experimental description title, author, affiliation, abstract, keywords, introduction, theoretical analysis and/or experimental description, results and discussion or conclusion, acknowledgments, references 4) Encyclopedias(百科全书) every branch of knowledge 5) Periodicals (期刊) a series of publications 6)Special Documentation(特殊文档) all the printed materials 3.Linguistic Features of Scientific Literature stylistically (文体上) scientific literature is a kind of form writing; syntactically(结构上)scientific literature has rigorous grammatical structures and in most cases is rather unitary; Morphologically(语法上)scientific literaure is featured by high specialization,the use of technical terms and jargons ,unambiguous implication and the fixed sense of the word Principles or Criteria of Translation Whenever principles or criteria of translation are under discussion in China, Yan Fu’s three- character guide”-----xin, da, ya, namely, faithfulness (信), expressiveness (达), and elegance (雅). These three principle has always been regarded as a plumb-line for measuring the professional level of translation and a goal for translators to strive after. However, in the application of this principle, people come to find some unsatisfactory aspects of the three-character guide and have put foreword a variety of new standards or criteria of translation. Despite a variety of opinions, two criteria are almost unanimously accepted by all, namely, the criterion of faithfulness/accuracy (忠实/准确) and that of smoothness (流畅). We may also take these two criteria as the principle scientific literature translation. By faithful/accuracy, we mean to be faithful not only to the original contents, to the original meaning and views, but also to the original form and style. By smoothness, we mean not only easy and readable rendering, but also idiomatic expression in the target language, free form stiff formula and mechanical copying form dictionaries. Unit 2 professional papers 2.1.Definition of professional papers A professional paper is a typewritten paper in which professionals present their views and research findings on a chosen topic. It is variously known as the “research paper”, “course paper”, “thesis paper” or “library paper”. The task of the author of a paper is essentially the same: to read on a particular topic, gather information about it, and report the findings in it. 2.2.Classification of professional papers
外文翻译初稿
外文翻译: 发现者,管理者?吸引,激励和留住知识型员工 吸引,激励和保留知识型员工已成为一个以知识为基础和劳动力市场紧张,在不断变化的知识管理实践和技术的全球趋同已重新界定工作性质的重要。虽然就业的做法和团队为基础的工作的个性化可能提供的个人和组织的灵活性,使人力资源的竞争优势和组织战略变得更加这一探索性研究确定的最和最有效的的人力资源战略,知识密集型企业在新加坡(KIFs)用于吸引,激励和留住这些工人。最流行的策略并不总是最有效的,似乎有独特的“捆绑”人力资源管理知识工作者的做法。这些措施有所不同,根据是否是外国或本地的所有权。统计学意义的结果为基础的架构,改善管理知识工作者的这些做法的有效性、建议。跨文化研究是有必要建立这些做法的扩散程度。 德鲁克在1989年创造“知识工人”一词,它是描述谁携带它们的个人,,而不是作为一个强大的资源知识组织,自己的。知识工作,可以说是一个知识分子的性质和以及合格员工形糊不清知识工作者和知识密集的企业(KIFs)的概念(Alvesson1993年)。乌尔里希(1998)断言说,随着知识工作的增加,智力资本是一家公司的只有可观的资产。福格特(1995)定义为一个人与知识工作者动机和能力,共同创造新的见解和能力,沟通,教练和便于实施的新思路。这项工作是不可重复性和结果为导向,用两个“传统”的科学方法和需要连续学习,直觉,新的思维和想象力。但其中一些概念可能矛盾,有些理想化,根据Alvesson(1993年:1000年至1004年)。他指出知识工作者的工作是更恰当地定性为“含糊不清密集的”比“知识密集”。这些工人可能同时拥有传统知识的类型连接科学和理性的分析问题的解决和必要的知识,以及作为一个特定的主体,需要处理的复杂性和不确定性的能力。后者需要直觉,创造性,灵活性和社交技巧。 一个新兴的文学和具体的人力资源战略研究证据,为吸引,激励和保留这些做法和组织蓝图工人(男爵和汉南,2002年,休伊特&Associates公司,2001年)。 Alvesson和Karreman 2001年),从文献和案例研究的审查,认为“知识管理的可能性,或更多的,作为一个管理人员或实践操作比对促进知识的创造“(2001年:1)切合做法的信息。知识工作者个人与个人的知识,并组织越来越多地寻求如何转化为社会共享的部署知识组织的目标。 我们的研究探讨有效的人力资源战略和措施,吸引、激励和留住知识型工人。我们的工作,认为跨国公司和当地知识密集的企业(KIFs)在六个部门,有两个主要目的: 1、确定最佳或最有效的人力资源管理知识的做法和工人,吸引提出了一个模式,激励和保 留这些工人; 探索的概念,负责管理人力资源的做法是否有一组特殊的一般的知识型工人和其他工人。 2、第二个目的是: ●提供一个以知识为基础的企业大多数受访者接受的通用定义;比较有关的知识型员工的可接受的和不可接受的营业额 ●其他员工和人力资源的做法套件; ●查明原因和采取的措施,以解决高层次知识 流动率; ●识别知识工作者从事的就业形式。这些包括为核心的全职员工,并作为非核心员工与就业分包,转包,咨询,兼职,定期,临时,休闲或家庭雇佣条款。 我们的结论认为超越东亚范围内的调查结果的相关性,跨文化比较研究的进一步指示。鉴于探索上述目标的性质,实证的方法是调查而不是假设检验。 文献回顾
SSM英文文献翻译
中南大学CentralSouthUniversity 本科毕业设计英文文献翻译题目 学生姓名 学号 指导教师 学院 专业班级 二○一六年一月八日
Spring 的web MVC 构架模式 Juergen Hoeller 1、介绍:Spring 的应用构架 当你第一次看到并接触Spring框架的时候,你一定会在心里想到;“哦哦,不不,这又是另一种Web构架”。这篇文章将会指出Spring框架不是什么特殊的web框架,而是一个通用的轻量级的应用程序框架,在专用网络支持下的应用程序框架。并且它会告诉你Spring框架明显区别于其他轻量级application framework,它将专注于web的支持,与struts和webwork有着明显的区别。 在和struts和webwork的对比上之中,Spring框架是一个服务于所有层面上的application framework:提供了bean的配置基础,AOP的支持,JDBC的提取框架,抽象事务支持,等等诸如此类。它有一个非常显著的特点:在某个层面上如果你不需要Spring的支持,它有一个非常显著的特点:在某个层面上如果你不需要Spring的支持,你就可以不使用Spring框架的class(类),只使用它的某一部分的功能。从它的设计理念,你可以看到Spring框架帮助你实现了真正的逻辑层和web层的成功分离:例如:一个校验应用将不用依靠controllers,就可以实现。这样的目标是更好的重用和易测:过分依靠不必要的容器和框架将不能实现这一点。 当然,Spring的自己本身的web支持和通常框架模式的细致完整。然而,Spring替换struts,webwork或者其他的web方案非常的容易。这个对于Spring 的web支持或者不同的地方,Spring允许你在web容器里面建立一个中间层,在测试环境或者标准独立的应用里面来设置重用你的商务逻辑。 还有就是在J2EE环境里面,可以让你你的商务逻辑不必依靠容器提供的服务,就比如像JTA,EJB的支持。良好的框架的一个web应用是可以运行在任何
如何将汉语翻译成英语.doc
如何将汉语翻译成英语 将汉语翻译成英语的技巧 一、代入法 这是进行英语写作时最常用的方法。同学们在掌握一定的词汇和短语之后,结合一定的语法知识,按照句子的结构特点,直接用英语代入相应的句式即可。如: ◎他从不承认自己的失败。 He never admits his failure. ◎那项比赛吸引了大批观众。 The match attracted a large crowd. ◎他把蛋糕分成4块。 He divided the cake intofour pieces. 二、还原法 即把疑问句、强调句、倒装句等还原成基本结构。这是避免写错句子的一种有效的办法。如: ◎这是开往格拉斯哥的火车吗? Is this the train forGlasgow? 还原为陈述句:This isthe train for Glasgow. ◎他是因为爱我的钱才同我结了婚。 It was because he lovedmy money that he married me. 还原为非强调句:Becausehe loved my money, he married me.
◎光速很快,我们几乎没法想象它的速度。 So fast does lighttravel that we can hardly imagine its speed. 还原为正常语序:Lighttravels so fast that we can hardly imagine its speed. 三、分解法 就是把一个句子分成两个或两个以上的句子。这样既能把意思表达得更明了,又能减少写错句子的几率。如: ◎我们要干就要干好。 If we do a thing, weshould do it well. ◎从各地来的学生中有许多是北方人。 There are students fromall over the country. Many of them are from the North. 四、合并法 就是把两个或两个以上的简单句用一个复合句或较复杂的简单句表达出来。这种方法最能体现学生的英语表达能力,同时也最能提高文章的可读性。如: ◎我们迷路了,这使我们的野营旅行变成了一次冒险。 Our camping trip turnedinto an adventure when we got lost. ◎天气转晴了,这是我们没有想到的。 The weather turned outto be very good, which was more than we could expect. ◎狼是高度群体化的动物,它们的成功依赖于合作。 Wolves are highly socialanimals whose success depends upon their cooperation.
文献阅读翻译
信用合作社的会员增长,多个成员团体以 及代理控制问题 Keith J.Leggett,Robert W.Strand 美国银行家协会,美国,华盛顿特区20036-3902,北部康涅狄格大道1120 2001年8月30日接收 摘要 从1982开始,联邦信贷联盟监管机构允许信用合作社添加多个会员组。该政策在1988年被美国最高法院驳回,但之后美国国会在晚些时候使其重新生效。允许信用社附加多个会员组,大大促进了行业的快速发展。为信用社增加无关的群体扩大,所有权和控制权的分离增加的前景,创造了潜在的代理控制问题。这可能是由一信用合作社一人一票的治理结构形成的。本研究发现的证据表明,由于信用社增加会员组和成员,代理问题才发展。如果一个信用联盟,接纳多个会员组,当会员增加时,管理层显然是能够把剩余收益又会员(在净息差高的形式)向自己引导(更高的工资和运营费用)。?2002爱思维尔科学公司版权所有。JEL分类:G21;G28;G34 关键词:信用联社;公司治理结构 1.介绍 Keith J.Leggett,Robert W.Strand/金融经济学回顾Ⅱ(2002)37-46 信用合作社资产 数据来源据国家信用合作社管理局 在过去的二十年里,美国信用社行业又有飞速增长。如图1所示,在这个时期行业资产年均增长近11%,大部分的增长可以归因于在1982年由美国国家信用合作社管理局(NCUA)的一个决定。联邦政府特许的信用合作社的监管机构允许不同的会员团体加入。在最高法院裁定NCUA多个集团政策违反了联邦信用社法案之后,国会于1998年考证了立法监管机构的行为。 最近发生的这些事情可能会影响管理者和信用合作社所有者之间的权力平衡。不像其他存款金融机构(银行和储蓄机构),由于他们无需被征联邦所得税,信用合作社享受补贴收入。管理者可能会充分利用统治结构请求更大份额的税务补贴。信用社是免税的金融机构。 *联系人/:+1-202-663-5506;传真:+1-202-828-4547 电子邮箱:kleggett@https://www.360docs.net/doc/5711380724.html,(K.J.Leggett).
外文文献翻译,好的外文文献这里找
香港科技大学图书馆Dspace https://www.360docs.net/doc/5711380724.html,t.hk/dspace 包括香港科技大学的学术论文、学位论文、研究报告等内容,均可免费获取全文。 Openj-gate https://www.360docs.net/doc/5711380724.html,/ 提供4350种开放获取的期刊的数百万期刊全文文献。 加利福尼亚大学国际和区域数字馆藏 https://www.360docs.net/doc/5711380724.html,/escholarship/ 加利福尼亚大学国际和区域数字馆藏研究项目。eScholarshipRepository主要提供已出版的期刊论文、未出版的研究手稿、会议文献以及其他连接出版物上的文章1万多篇,均可免费阅读。 剑桥大学机构知识库 https://www.360docs.net/doc/5711380724.html,/ 由Cambridge University Library和University Computing Service维护,提供剑桥大学相关的期刊、学术论文、学位论文等电子资源。 发展中国家联合期刊库 https://www.360docs.net/doc/5711380724.html,.br/ 非营利的电子出版物服务机构,提供来自发展中国家(如巴西、古巴、印度、印尼、肯尼亚、南非、乌干达、津巴布韦等)的开放获取的多种期刊的全文。 美国密西根大学论文库 https://www.360docs.net/doc/5711380724.html,/index.jsp 美国密西根大学论文库2万多篇期刊论文、技术报告、评论等文献全文。包含艺术学、生物学、社会科学、资源环境学等学科的相关论文,另还有博硕士论文。标识为OPEN的可以打开全文。 jfg CERN Document Server http://cdsweb.cern.ch/ 主要覆盖物理学(particle physics)及相关学科,提供360,000多篇全文文献,包括预印文献、期刊论文、图书、图片、学位论文等等。 kl ArXiv https://www.360docs.net/doc/5711380724.html,/ ArXiv是属于Cornell University的非盈利教育机构,面向物理学、数学、非线性科学、计算机科学和定量生物学等学科提供16种免费电子期刊的访问。 NASA Technical Reports Server https://www.360docs.net/doc/5711380724.html,/?method=browse 主要是关于航空航天领域研究的科技报告和会议论文。
英语翻译成汉语
[转] 英语中常见的123个中国成语写作就不用愁字数啦 1.爱屋及乌 Love me, love my dog. 2.百闻不如一见 Seeing is believing. 3.比上不足比下有余 worse off than some, better off than many; to fall short of the best, but be better than the worst. 4.笨鸟先飞 A slow sparrow should make an early start. 5.不眠之夜 white night 6.不以物喜不以己悲 not pleased by external gains, not saddened by personnal losses 7.不遗余力 spare no effort; go all out; do one's best 8.不打不成交 No discord, no concord. 9.拆东墙补西墙 rob Peter to pay Paul 10.辞旧迎新 bid farewell to the old and usher in the new; ring out the old year and ring in the new 11.大事化小小事化了 try first to make their mistake sound less serious and then to reduce it to nothing at all 12.大开眼界 open one's eyes; broaden one's horizon; be an eye-opener 13.国泰民安 The country flourishes and people live in peace 14.过犹不及 going too far is as bad as not going far enough; beyond is as wrong as falling short; too much is as bad as too little 15.功夫不负有心人 Everything comes to him who waits. 16.好了伤疤忘了疼 once on shore, one prays no more 17.好事不出门恶事传千里 Good news never goes beyond the gate, while bad
文献阅读与翻译 第一章译文参考
U1 General Description II. Translation 1. Put the following sentences into Chinese, using either literal or free translation. 1) It was the best of times, it was the worst of times; it was the age of wisdom, it was the age of foolishness; it was the epoch of belief, it was the epoch of incredulity; it was the season of the Light, it was the season of Darkness; it was the spring of Hope, it was the winter of Despair; we had everything before us, we had nothing before us; we were all going to Heaven, we were all going direct the other way. 这是最美好的时期,这是最坏的时期,这是智慧的年代,这是愚蠢的年代,这 是从满信仰的时代,这是顾虑重重的时代,这是光明的季节,这是黑暗的季节,这是富有希望的春天,这是充满绝望的寒冬;我们拥有一切,我们一无所有; 我们正笔直走向天堂,我们正笔直走向地狱。 2) A greeting card can warm a heart, hold a hand, lend an ear, pat a back, light up a face, tickle a funny bone, dry an eye, surprise a child, woo a sweetheart, toast a bride, welcome a stranger, wave a good-bye, shout a bravo, blow a kiss, mend a quarrel, ease a pain, boost a morale, stop a worry and start a tradition. 一张小小贺卡可以温暖一颗心,握紧一双手,倾听肺腑言,轻拍友人背;它另 人喜洋洋,撩得心痒痒,抹去泪汪汪;它给孩子以惊喜,给恋人以温纯,给新 娘以祝福,给路人以欢迎;它可用以挥手道别,高声喝彩,遥寄飞吻,也可用 以弥补嫌隙,减轻痛苦,提高士气,解除忧虑,开创一种新风尚。 2. Put the following passage into Chinese. As an important means for preserving knowledge, various literatures have become precious resources or treasures for the mankind, which have greatly contributed to the social progress of the human race. Professional literatures have been regarded as “intangible assets” of the whole world because they are, on the one hand, the summary, generalization, and development of the achievements obtained on the basis of previous experiences or studies; and on the other hand, they have been accumulated and handed down from generation to generation. In this sense, therefore, all kinds of literature are records of precious research findings and academic achievements, and the crystallization of human civilization. 作为一种重要的知识储备手段,各类文献已成为宝贵的资源宝藏,大大促进了 人类社会的进步。 专业文献一向被认为是全世界的“无形财产”。因为一方面它们是对前人的经验 或研究成果的总结,概括和发现;另一方面,又是人类长期积累、世代相传的
外文文献翻译助手
五分钟搞定5000字-外文文献翻译 在科研过程中阅读翻译外文文献是一个非常重要的环节,许多领域高水平的文献都是外文文献,借鉴一些外文文献翻译的经验是非常必要的。由于特殊原因我翻译外文文献的机会比较多,慢慢地就发现了外文文献翻译过程中的三大利器:Google“翻译”频道、金山词霸(完整版本)和CNKI“翻译助手"。 具体操作过程如下: 1.先打开金山词霸自动取词功能,然后阅读文献; 2.遇到无法理解的长句时,可以交给Google处理,处理后的结果猛一看,不堪入目,可是经过大脑的再处理后句子的意思基本就明了了; 3.如果通过Google仍然无法理解,感觉就是不同,那肯定是对其中某个“常用单词”理解有误,因为某些单词看似很简单,但是在文献中有特殊的意思,这时就可以通过CNKI的“翻译助手”来查询相关单词的意思,由于CNKI的单词意思都是来源与大量的文献,所以它的吻合率很高。 另外,在翻译过程中最好以“段落”或者“长句”作为翻译的基本单位,这样才不会造成“只见树木,不见森林”的误导。 注: 1、Google翻译:https://www.360docs.net/doc/5711380724.html,/language_tools google,众所周知,谷歌里面的英文文献和资料还算是比较详实的。我利用它是这样的。一方面可以用它查询英文论文,当然这方面的帖子很多,大家可以搜索,在此不赘述。回到我自己说的翻译上来。下面给大家举个例子来说明如何用吧 比如说“电磁感应透明效应”这个词汇你不知道他怎么翻译, 首先你可以在CNKI里查中文的,根据它们的关键词中英文对照来做,一般比较准确。
在此主要是说在google里怎么知道这个翻译意思。大家应该都有词典吧,按中国人的办法,把一个一个词分着查出来,敲到google里,你的这种翻译一般不太准,当然你需要验证是否准确了,这下看着吧,把你的那支离破碎的翻译在google里搜索,你能看到许多相关的文献或资料,大家都不是笨蛋,看看,也就能找到最精确的翻译了,纯西式的!我就是这么用的。 2、CNKI翻译:https://www.360docs.net/doc/5711380724.html, CNKI翻译助手,这个网站不需要介绍太多,可能有些人也知道的。主要说说它的有点,你进去看看就能发现:搜索的肯定是专业词汇,而且它翻译结果下面有文章与之对应(因为它是CNKI检索提供的,它的翻译是从文献里抽出来的),很实用的一个网站。估计别的写文章的人不是傻子吧,它们的东西我们可以直接拿来用,当然省事了。网址告诉大家,有兴趣的进去看看,你们就会发现其乐无穷!还是很值得用的。https://www.360docs.net/doc/5711380724.html, 3、网路版金山词霸(不到1M):https://www.360docs.net/doc/5711380724.html,/6946901637944806 翻译时的速度: 这里我谈的是电子版和打印版的翻译速度,按个人翻译速度看,打印版的快些,因为看电子版本一是费眼睛,二是如果我们用电脑,可能还经常时不时玩点游戏,或者整点别的,导致最终SPPEED变慢,再之电脑上一些词典(金山词霸等)在专业翻译方面也不是特别好,所以翻译效果不佳。在此本人建议大家购买清华大学编写的好像是国防工业出版社的那本《英汉科学技术词典》,基本上挺好用。再加上网站如:google CNKI翻译助手,这样我们的翻译速度会提高不少。 具体翻译时的一些技巧(主要是写论文和看论文方面) 大家大概都应预先清楚明白自己专业方向的国内牛人,在这里我强烈建议大家仔
文献综述,外文翻译,论文网站
文献综述怎么写 1) 什么是文献综述? 文献综述是研究者在其提前阅读过某一主题的文献后,经过理解、整理、融会贯通,综合分析和评价而组成的一种不同于研究论文的文体。 2) 文献综述的写作要求 1、文献综述的格式 文献综述的格式与一般研究性论文的格式有所不同。这是因为研究性的论文注重研究的方法和结果,而文献综述介绍与主题有关的详细资料、动态、进展、展望以及对以上方面的评述。因此文献综述的格式相对多样,但总的来说,一般都包含以下四部分:即前言、主题、总结和参考文献。撰写文献综述时可按这四部分拟写提纲,再根据提纲进行撰写工作。 前言,要用简明扼要的文字说明写作的目的、必要性、有关概念的定义,综述的范围,阐述有关问题的现状和动态,以及目前对主要问题争论的焦点等。前言一般200-300字为宜,不宜超过500字。 正文,是综述的重点,写法上没有固定的格式,只要能较好地表达综合的内容,作者可创造性采用诸多形式。正文主要包括论据和论证两个部分,通过提出问题、分析问题和解决问题,比较不同学者对同一问题的看法及其理论依据,进一步阐明问题的来龙去脉和作者自己的见解。当然,作者也可从问题发生的历史背景、目前现状、发展方向等提出文献的不同观点。正文部分可根据内容的多少可分为若干个小标题分别论述。 小结,是结综述正文部分作扼要的总结,作者应对各种观点进行综合评价,提出自己的看法,指出存在的问题及今后发展的方向和展望。内容单纯的综述也可不写小结。 参考文献,是综述的重要组成部分。一般参考文献的多少可体现作者阅读文献的广度和深度。对综述类论文参考文献的数量不同杂志有不同的要求,一般以30条以内为宜,以最近3-5年内的最新文献为主。 2、文献综述规定 1. 为了使选题报告有较充分的依据,要求硕士研究生在论文开题之前作文献综述。 2. 在文献综述时,研究生应系统地查阅与自己的研究方向有关的国内外文献。通常阅读文献不少于30篇,且文献搜集要客观全面 3. 在文献综述中,研究生应说明自己研究方向的发展历史,前人的主要研究成果,存在的问题及发展趋势等。 4. 文献综述要条理清晰,文字通顺简练。 5. 资料运用恰当、合理。文献引用用方括号[ ]括起来置于引用词的右上角。 6. 文献综述中要有自己的观点和见解。不能混淆作者与文献的观点。鼓励研究生多发现问题、多提出问题、并指出分析、解决问题的可能途径,针对性强。 7. 文献综述不少于3000字。 3、注意事项 ⒈搜集文献应尽量全。掌握全面、大量的文献资料是写好综述的前提,否则,随便搜集一点资料就动手撰写是不可能写出好的综述。 ⒉注意引用文献的代表性、可靠性和科学性。在搜集到的文献中可能出现观点雷同,有的文献在可靠性及科学性方面存在着差异,因此在引用文献时应注意选用代表性、可靠性和科学性较好的文献。 ⒊引用文献要忠实文献内容。由于文献综述有作者自己的评论分析,因此在撰写时应分清作者的观点和文献的内容,不能篡改文献的内容。引用文献不过多。文献综述的作者引用间接文献的现象时有所见。如果综述作者从他人引用的参考文献转引过来,这些文献在他人
物流配送中心外文文献原稿和译文
物流配送中心外文文献原稿和译文 北京化工大学北方学院毕业设计(论文)——外文文献原稿和译文 外文文献原稿和译文 原稿 logistics distribution center location factors: (1) the goods distribution and quantity. This is the distribution center and distribution of the object, such as goods source and the future of distribution, history and current and future forecast and development, etc. Distribution center should as far as possible and producer form in the area and distribution short optimization. The quantity of goods is along with the growth of the size distribution and constant growth. Goods higher growth rate, the more demand distribution center location is reasonable and reducing conveying process unnecessary waste. (2) transportation conditions. The location of logistics distribution center should be close to the transportation hub, and to form the logistics distribution center in the process of a proper nodes. In the conditional, distribution center should be as close to the railway station, port and highway. (3) land conditions. Logistics distribution center covers an area of land in increasingly expensive problem today is more and more important. Is the use of the existing land or land again? Land price? Whether to
中文名字翻译成英文
中文名字翻译成英文 一般就是把中文名字用拼音方式写出即可,注意大小写规定和前后顺序要求。 例如:张三 Zhang San 或者 San Zhang 根据英文习惯,名在前,姓在后,所以第二种更符合外国人习惯,但是第一种现在也很常见,也算对。 张三四 Zhang Sansi 或者 Sansi Zhang 如果遇到三个字的,第三个字的拼音不用大写,但是要和第二个字的拼音连着写不能有空格。 此外,如果有必要,您能够自己起个有意义的或者发音相似的外国名字来用,一般像香港人都会有两个名字,一个中文名,一个外文名。 中文翻译英文其它实用方法 首先不要翻译姓,不要翻译姓,不要翻译姓!把姓放在名字的最后面用拼音写就好了。 按照音译的方式来取名字的话也能够不过有两个问题需要注意一下,第一很多人都会有一样的名字(因为英文里Y等字母开头的名字很有限)第二有些音英语几乎没有所以选出的名字会也许会有点古怪/ 非主流。 我举个例子吧: 黄晓明如果音译的话= 晓明 +Huang/ Wong = Seamus, Shane, Sean, Shayne, Sheldon, Sherman,(sigmund, simon) 这些名字当中 Seamus 是苏格兰名比较粗,Sheldon,Sherman, Sigmund 比较过时。所以要
么 Simon Huang, Sean Huang, Shane Huang.(或者Wong- 对于英国人来说粤语拼音更熟悉)按照名字的意义来翻译不错,不过有的名字不 好翻译,尤其是男人的名字,为什么?因为在英国像‘阳/晓/春/月/ 夏/天’等词更多是用在女孩子的名字,男人用得少。之外觉得我得提 醒大家千万不要直接翻译,千万不要直接翻译,千万不要直接翻译而 且千万不要自己乱起, Sun, Star, Red, Spring, King, Morning,Moon, Green 等词不能够做名字的,几乎所有名词/形容词不能够当 作名字的,需要查‘Name Dictionary' 才能找出名字来。比如晓明:与日出/日光相关,搜一下于相关的名字,名字的意思和来源即可。 中文翻译英文起名注意事项 问题1:所起英文名太常见 第一种问题是起的英文名太常见,如:Henry, Jane, John, Mary. 这就像外国人起名叫赵志伟、王小刚、陈*一样,给人牵强附会的感觉。虽然起名字并无一定之规,但给人的感觉很重要。 问题2:不懂文化差异而犯忌 此外,因为文化差异,有些名字引申义不雅,如:Cat, Kitty,在英 语俚语中,它们指的是女性的阴部。Cat 宜改为Cathy,Kitty 宜改为Kate。 问题3:改名又改姓 一般来说,非英语国家的人到了美国,都可能改名,但没有改姓的。 这关系到家族荣誉,将来还会关系到遗传基因。所以,无论自己的姓 多么难读,都要坚持。常见有人起英文名时连姓也改了,如司徒健Ken Stone,肖燕Yan Shaw。下列英文姓尚可接受,但也不用,如:Young 杨,Lee李。 问题4:英文名与姓谐音
外文翻译原稿
STRESSES IN A LAYER 5.1 Vertical stresses In many places on earth the soil consists of practically horizontal layers. If such a soil does not carry a local surface load, and if the groundwater is at rest, the vertical stresses can be determined directly from a consideration of vertical equilibrium. A simple case is a homogeneous layer, completely saturated with water, see Figure 5.1. The pressure in the water is determined by the location of the phreatic surface. This is defined as the plane where the pressure in the groundwater is equal to the atmospheric pressure. If the atmospheric pressure is taken as the zero level of pressures, as is usual, it follows that p = 0 at the phreatic surface. If there are no capillary effects in the soil, this is also the upper boundary of the water, which is denoted as the groundwater table. It is assumed that in the example the phreatic surface coincides with the soil surface, see Figure 5.1. The volumetric weight of the saturated soil is supposed to be = 20 kN/3m.The vertical normal stress in the soil now increases linearly with depth, zz d σγ =(5.1) Figure 5.1: Stresses in a homogeneous layer. This is a consequence of vertical equilibrium of a column of soil of height d. It has been assumed that there are no shear stresses on the vertical planes bounding the
文献翻译心得
英文文献翻译心得体会 历经10周的时间,终于将这翻译搞定,其中各种艰辛无以言表,但是既然是心得体会,我想有必须写下,来表达我这过程中的一些体会。 说实话,翻译挺难的,在这过程中很多时候会出现中式的翻译,反复查找,反复纠正,很烦人。不过,在这其中,我也学会了很多词汇和句子,对自己挺有用的。下面就说下我对这文献的体会。 这文献是有关于生态低碳城市的,近几年全国掀起了建设生态城市、低碳城市的热潮。提出建设生态城市或低碳城市的省市,在地理分布上遍及全国各地;规模上大到整个市域,小到一个街区;途径上有老城改造,也有新城建设;模式上有政府统一建设,有社会资本参与,也有很多国际合作开发项目。据有关数据显示,截至2009年底,全国提出建设生态城市或低碳城市的有超过40多座。这股生态低碳城市建设的热潮,是否能够解决当前城市发展与自然环境保护之间的矛盾,是否能够为未来的人居环境建设开辟一条新路? 无可否认,这样的实践是有着积极的意义的,虽然各地建设生态城的背景和动机会有所差别。目前生态城建设的进度不一,水平也是良莠不齐。将来这些生态城有的可能成功,有的可能失败,但作为一项开拓性、探索性的事业来讲,失败具有与成功一样的意义与价值。 生态城从本质上来讲,就是一座能够与自然生态环境和谐共生的城市。建设生态城的实践,就是要创造这样一座城市的范例,破解高强度城市开发与自然生态环境保护相冲突的难题,以供未来更大规模的城市建设或城市更新借鉴。作为成功的生态城建设实践,首先其理2 念、方法、途径必须具有可操作性。城市是全社会参与建设的复杂的超级综合体,生态城在很多方面必须对传统的城市建设理念、手段进行创新,这些创新必须能够得到城市主要建设参与主体的普遍认同和自觉的实施,这样才有成功的可能,才是可实现的城市方案,停留在大脑或纸面上的,或通过行政命令强制推行的生态城是没有意义的。其次城市环境要有明显的可感知性。生态城必须能够使在其中生活、工作的人们明显的感受到与传统城市的那种差别,这种差别包括更好的与自然的亲近感,天更蓝了、水更清了、各种小动物更多了;更舒适的交通环境,交通不拥堵了,出行更加舒适惬意;有更低的生活成本,减少对外部资源的依赖,实现更多的自给。 以上就是我对生态低碳城市的一些体会,同时我从翻译中学到很多有关这方面的东西,我希望我以后会阅读更多的英文文献,来丰富和充分自己。篇二:bk文献翻译心得文献翻译心得 第一次做整篇论文的书面翻译,还是很有收获。 如果只是去读还不觉得,因为有的意思能够意会,但要做书面翻译就很头疼了,因此需要不断总结以提高翻译技巧。 1、胆大,如果按照英文对照翻译的话,总感觉无法表达原文需要表达的语境,所以有时应该翻译得大胆一点,不用太过于受制于句式。 2、心细,有些复杂的句子,看第一遍是一个意思,看第二遍又是另一个意思,对于复杂句子的翻译一定要精读,寻找最得体的翻译;对于有些词也是同样的道理,揣摩出最精确的意思。 3、翻译前可以看看相关的中文文献,第一次我把assembly framework翻译成了“装置结构”,但看了另一篇文献后发现翻译成“组件骨架”更精确。 4、多看文献,熟悉专业名词,还能使翻译出来的文献更加地道。 5、要有宏观思维,时时从全文大角度进行精确翻译。如文中的value,前面我一直翻译成“价值”或“作用”,到后面发现应该是“数值”的意思。 当然遇到了一些问题,主要是词和句。有的词、句的确翻译不出来,就算翻译出来了也太勉强,自己都看不下去。解决办法就是多看文献,寻求指导。